Нож - RU2358856C2
Код документа: RU2358856C2
Чертежи





Описание
Изобретение относится к ножу в соответствии с ограничительной частью п.1 формулы. Такой нож описан в DE 10208345 С1.
В известном из DE 10208345 С1 ноже использовано то свойство, что реакционное усилие резания, возникающее в процессе резания между лезвием ножа и разрезаемым материалом, содержит тянущую составляющую, которая в направлении выдвигания лезвиедержателя вызывает его дополнительное относительное движение. Это дополнительное относительное движение используется для того, чтобы устранить кинематическую связь между исполнительной деталью для лезвиедержателя и самим лезвиедержателем.
За счет устранения кинематической связи между исполнительной деталью и лезвиедержателем можно вызвать защитную реакцию, которая может состоять, например, в том, что защитный элемент, например защитный штифт, надежно охватывает режущую кромку ножа. В частности, защитная реакция может состоять в том, что размещающий в себе лезвие ножа лезвиедержатель сразу же возвращается в свое защищенное положение внутри корпуса ножа, когда контакт с разрезаемым материалом теряется. Последнее происходит независимо от того, удерживается ли исполнительная деталь для лезвиедержателя вручную в направлении его выдвигания или нет.
У ножа из DE 19723279 С1, представляющего собой предшественник ножа из DE 10208345 С1, тянущая доля реакционного усилия резания, вызывающая дополнительное относительное движение между лезвиедержателем и корпусом ножа, зависит от угла наклона режущей кромки ножа относительно разрезаемого материала. При плоских углах она меньше, а при угле 90°, т.е. когда реакционное усилие резания перпендикулярно режущей кромке лезвия, эта доля равна нулю.
Только при используемом наискось к разрезаемому материалу ноже из DE 19723279 С1 тянущая доля реакционного усилия резания настолько велика, что лезвиедержатель вытягивается из корпуса ножа, и тем самым срабатывает предохранительный механизм, т.е. устраняется кинематическая связь между исполнительной деталью для лезвиедержателя и самим лезвиедержателем.
Описанный выше родовой безопасный нож из DE 10208345 С1 отличается от ножа из DE 19723279 С1 тем, что размещающая в себе лезвие ножа передняя часть лезвиедержателя образует вместе с корпусом ножа кинематический преобразователь, который вызывает дополнительное относительное движение за счет того, что действующее на режущую кромку лезвия ножа усилие нажима в пределах имеющегося между лезвиедержателем и корпусом ножа поперечного зазора вызывает составляющую движения лезвиедержателя перпендикулярно режущей кромке, связанную с составляющей движения в направлении выдвигания лезвиедержателя.
Описанное выше выполнение придает ножу из DE 10208345 С1 дополнительную предпочтительную надежность, поскольку предохранительный механизм срабатывает уже тогда, когда реакционное усилие резания лежит в зоне чисто усилия нажима, т.е. когда режущая кромка лезвия ножа проходит перпендикулярно разрезаемому материалу.
У ножа из DE 10208345 С1, следовательно, необходимое для срабатывания предохранительного механизма дополнительное относительное движение создается независимо от угла наклона между режущей кромкой лезвия ножа и разрезаемым материалом.
Исходя из предпочтительного самого по себе ножа из DE 10208345 С1 в основе настоящего изобретения лежит задача дополнительного усовершенствования предохранительного механизма.
Эта задача решается вместе с признаками ограничительной части п.1 формулы согласно изобретению за счет того, что между лезвиедержателем и исполнительной деталью образованы кинематический преобразователь и поперечный зазор.
У безопасного ножа из DE 10208345 С1 исполнительная деталь должна упираться в передний ограничительный упор, для того чтобы вообще могло возникать вызывающее защитную реакцию дополнительное относительное движение между исполнительной деталью и лезвиедержателем, а именно независимо от угла наклона между режущей кромкой ножа и разрезаемым материалом.
У ножа согласно изобретению, напротив, исполнительной детали не требуется упираться в ограничительный упор, дополнительное относительное движение возникает в каждом положении выдвигания или в промежуточном положении лезвиедержателя, как только на режущую кромку ножа будет действовать усилие. Это происходит и тогда, когда реакционное усилие резания лежит в зоне чисто усилия нажима, т.е. когда режущая кромка лезвия ножа проходит перпендикулярно разрезаемому материалу.
Это преимущество согласно изобретению достигается за счет того, что кинематический преобразователь в любом промежуточном положении лезвиедержателя, т.е. при выдвинутом на любую длину лезвии ножа, может быть активирован нажатием на режущую кромку ножа, чтобы создать необходимое для защитного действия дополнительное относительное движение, посредством которого первичный и вторичный соединительные элементы отделяются друг от друга.
При предпочтительном применении следствием этого является возврат лезвия ножа в свое защищенное положение внутри корпуса ножа.
Другое следствие может состоять в том, что за счет отделения друг от друга первичного и вторичного соединительных элементов активируется, т.е. выдвигается, защитная деталь, например находящийся под натяжением пружины защитный штифт, который, охватывая сверху режущую кромку ножа, предохраняет от неприятных порезов.
В соответствии с одним предпочтительным примером осуществления изобретения кинематический преобразователь образован косой плоскостью скольжения, которая образована лезвиедержателем или исполнительной деталью и наклонена к средней оси корпуса ножа, и кромкой скольжения, которая образована исполнительной деталью или лезвиедержателем и взаимодействует с косой плоскостью скольжения.
Для изобретения существенными являются, в частности, следующие признаки.
У ножа с размещающим в себе его лезвие лезвиедержателем и с подвижной относительно лезвиедержателя исполнительной деталью между последней и лезвиедержателем расположен кинематический преобразователь, который при воздействующем поперек на режущую кромку ножа нажатии вызывает дополнительное относительное движение между лезвиедержателем и исполнительной деталью, что происходит независимо от выдвинутого положения лезвиедержателя, кинематически связанного с исполнительной деталью в направлении выдвигания. Дополнительное относительное движение вызывает отделение друг от друга двух соединительных элементов, соединяющих между собой исполнительную деталь и лезвиедержатель только в направлении выдвигания.
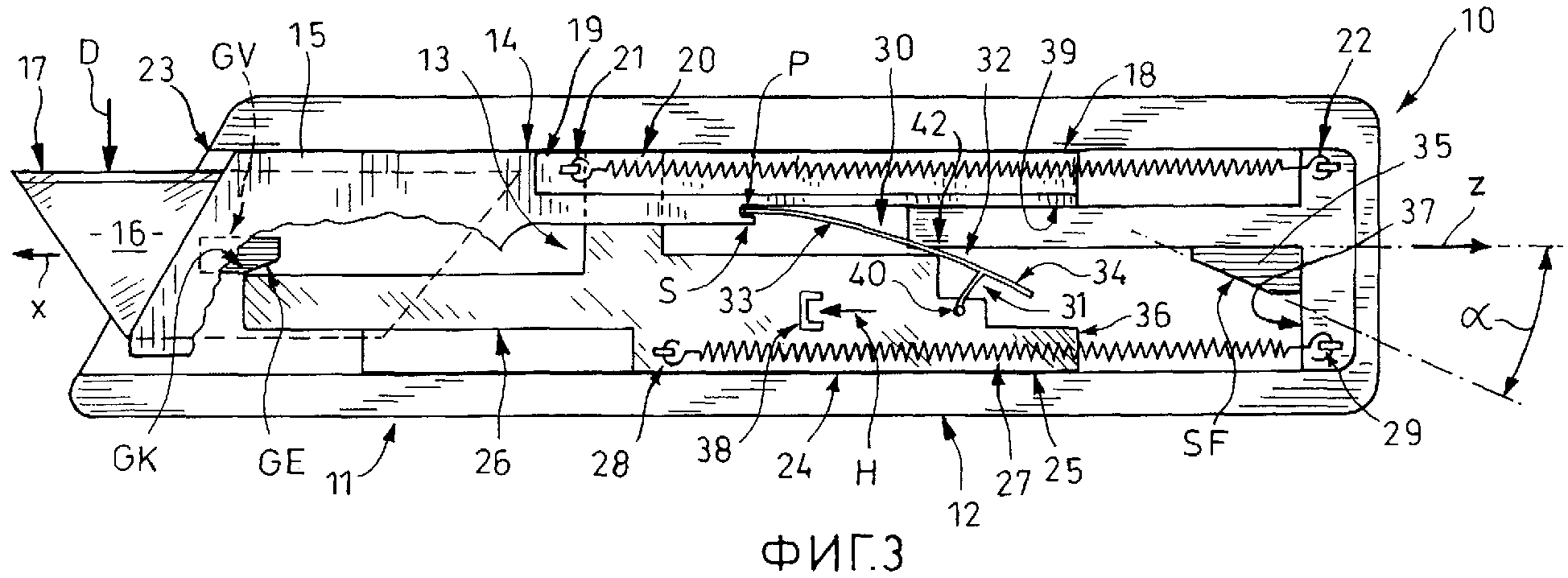
На чертежах изображен предпочтительный пример осуществления изобретения, а именно на фиг.1-6 схематично изображен процесс функционирования безопасного ножа, а на фиг.4а в виде увеличенного фрагмента изображен вариант выполнения, принципиально аналогичный функционированию на фиг.4.
У изображенного на чертежах ножа 10, безопасного ножа, показана только чашка 12 его корпуса 11.
Внутри продольной выемки 13 чашки 12 корпуса с возможностью поступательного прямолинейного перемещения вдоль средней оси М, а именно в направлении x выдвигания и направлении z отвода, расположен лезвиедержатель 14.
Передняя часть 15 лезвиедержателя 14 размещает в себе изготовленное из полосовой стали лезвие 16, имеющее в данном случае форму трапеции. Режущая кромка лезвия 16 обозначена поз.17.
Фрагмент передней части 15 лезвиедержателя 14 изображен с вырывом, чтобы были видны другие детали ножа 10. К передней части 15 лезвиедержателя 14 с задней стороны или в направлении z отвода примыкает направляющее продолжение 18, имеющее продольную выемку 19 для размещения пружины 20 растяжения. Переднее ушко 21 пружины 20 растяжения удерживается в месте закрепления лезвиедержателя 14, а заднее ушко 22 - в месте закрепления на чашке 12 корпуса. Пружина 20 растяжения стремится втянуть лезвиедержатель 14 в корпус 11 ножа в направлении z отвода.
В передней части 15 лезвиедержателя 14 имеется направленный вбок выступ GV скольжения, образующий плоскость GE скольжения, которая заключает с направлением x выдвигания острый угол β.
Внутри продольной выемки 13 расположена, кроме того, исполнительная деталь 24, которая к тому же выполнена с возможностью скольжения в продольной выемке 13 в направлении x выдвигания и в направлении z отвода.
Исполнительная деталь 24 имеет заднюю часть 25, к которой спереди примыкает управляющее продолжение 26 с передней кромкой GK скольжения.
Пружина 27 растяжения закреплена своим передним ушком 28 на исполнительной детали 24, а своим задним ушком 29 - на чашке 12 корпуса. Пружина 27 растяжения стремится, таким образом, переместить исполнительную деталь 24 в направлении z отвода.
Лезвиедержатель 14 и исполнительная деталь 24 выполнены с возможностью движения по двум параллельным друг другу траекториям с образованием поперечного зазора Q.
Также в продольной выемке 13 и в задней части 25 исполнительной детали 24 расположена приблизительно Т-образная деталь 30, которая состоит, в целом, из пружиняще-упругого материала, в частности пружинной стали. Ножка 31 Т-образной детали 30 зажата в задней части 25 исполнительной детали 24 в месте 40 зажима. Направленный от задней части 25 исполнительной детали 24 конец ножки 31 образует с представляющей собой стержень 32 перекладиной Т-образной детали 30 жесткий соединительный узел 42. Направленный от жесткого соединительного узла 42 в направлении х выдвигания длинный участок стержня 32 представляет собой соединительное плечо 33. Направленный назад в направлении z отвода участок стержня 32 образует управляющее плечо 34, взаимодействующее с управляющей поверхностью SF управляющего кулачка 35, отформованного на чашке 12 корпуса.
Управляющая поверхность SF на фиг.1-4, 5, 6 является для соединительного плеча 33 направляющей поверхностью скольжения, которая заключает с направлением z отвода острый угол α.
Передний конец соединительного плеча 33 образует первичный соединительный элемент Р, тогда как открытое назад в направлении z отвода соединительное отверстие (выемка) лезвиедержателя 14 представляет собой вторичный соединительный элемент S.
Стержень 32 представляет собой, таким образом, двуплечий рычаг, который на одной стороне образованного ножкой 31 места сочленения образует соединительное плечо 33, направленное своим первичным соединительным элементом Р вперед в направлении x выдвигания, а на другой стороне места сочленения - направленное назад в направлении z отвода управляющее плечо 34.
Управляющее плечо 34 выполнено с возможностью контактирования посредством управляющей поверхности SF, когда исполнительная деталь 24 находится в своем отведенном в направлении z отвода положении. При этом стержень 32 поворачивается таким образом, что первичный соединительный элемент Р движется из своего свободного положения вне траектории движения вторичного соединительного элемента S в положение готовности для зацепления за вторичный соединительный элемент S.
Функционирование ножа 10 происходит следующим образом.
На фиг.1 нож 10 находится в состоянии покоя. Пружина 27 растяжения тянет исполнительную деталь 24 ее задней торцевой поверхностью 36 к упорной поверхности 37 чашки 12 корпуса. При этом первичный соединительный элемент Р находится еще на небольшом расстоянии (в положении готовности) перед вторичным соединительным элементом S.
На фиг.2 через исполнительный выступ 38 в направлении х выдвигания пальцем уже оказано усилие Н в такой степени, что управляющее плечо 34 уже находится вне контакта с управляющей поверхностью SF. С началом движения выдвигания в направлении x первичный соединительный элемент Р предварительно входил во вторичный соединительный элемент S, тогда как управляющее плечо 34 за счет пружиняще-упругого выполнения Т-образной детали 30 все еще прилегало к управляющей поверхности SF. При этом первичный соединительный элемент Р оставался ориентированным со вторичным соединительным элементом S.
Продолжающее действовать в направлении х выдвигания усилие Н пальца вызывает дальнейшее удаление управляющего плеча 34 от управляющей поверхности SF, так что на фиг.3 лезвие 16 ножа свободно выходит наружу через выходную щель 23 корпуса 11.
При рассмотрении фиг.2 и 3 можно заметить, что кромка GK скольжения управляющего выступа 26 на всем пути выдвигания в направлении x находится в нижней части плоскости GE скольжения выступа GV скольжения. В отношении фиг.3 можно к тому же констатировать, что лезвиедержатель 14 вместе с лезвием 16 выдвинут еще неполностью.
Когда затем на фиг.3 усилие D нажима начинает действовать, например, перпендикулярно режущей кромке 17 лезвия 16, лезвиедержатель 14 смещается при сравнении между собой фиг.3 и 4 своей плоскостью Е скольжения вдоль кромки GK скольжения на величину поперечного зазора Q назад и совершает, таким образом, одновременно дополнительное относительное движение на пути R. При этом связь между элементами Р и S прекращается, тогда как выдвинутое положение исполнительной детали 24 в направлении x не изменилось.
После рассмотрения изображенных на фиг.1-4 функциональных состояний становится ясно, что образованный плоскостью GE скольжения и кромкой GK скольжения кинематический преобразователь GE/GK может всегда действовать независимо от выдвинутого в направлении x или втянутого в направлении z положения, как только возникнет усилие D нажима, которое, само собой, может быть направлено также под наклоном к режущей кромке 17.
Следует исходить из того, что ножом 10 в соответствии с функционированием на фиг.4 продолжают резать, пока его лезвие 16 не выйдет из разрезаемого материала и не будет больше удерживаться в разрезаемом материале, пока пружина 20 не отведет назад лезвиедержатель 14, и тем самым не будет достигнуто функциональное состояние на фиг.5. После этого режущая кромка 17 лезвия 16 соскальзывает с разрезаемого материала (не показан), в результате чего срабатывает пружина 20 растяжения и втягивает лезвиедержатель 14 вместе с размещенным в нем лезвием 16 в направлении z отвода в защищенное положение внутрь корпуса 11.
Можно также представить себе, что у одной формы выполнения (не показана) вследствие устранения связи между элементами Р и S лезвиедержатель 14 вместе с лезвием 16 не будет втянут в корпус 11 в направлении z отвода. Напротив, в качестве альтернативы потенциальную энергию напряженной в направлении x пружины 20 растяжения можно было бы использовать также для того, чтобы выдвигать защитное устройство, например известный сам по себе защитный штифт, параллельно средней оси М вдоль режущей кромки 17 во избежание порезов.
В связи с фиг.5 следует заметить, что усилие Н пальца действует без изменений и что исполнительная деталь 24 удерживается, таким образом, в своем выдвинутом в направлении x положении.
При снятии усилия Н пальца возникает сначала ситуация на фиг.6, когда кромка GK скольжения снова попадает в нижнюю часть плоскости GE скольжения. Задняя торцевая поверхность 36 исполнительной детали 24 находится еще на расстоянии от упорной поверхности 37 со стороны корпуса ножа. Также первичный соединительный элемент Р находится еще как раз под вторичным соединительным элементом S, тогда как конец управляющего плеча 34 Т-образной детали 30 уже касается управляющей поверхности SF управляющего кулачка 35. При этом начинается упругий прогиб обладающей собственным пружинящим свойством детали 30. Это означает, что управляющее плечо 34 при своем движении в направлении z отвода упирается против возвратного усилия пружины, тогда как движущееся также в направлении z отвода соединительное плечо 33 своим первичным соединительным элементом Р проходит второй соединительный элемент S.
При переходе из функционального состояния на фиг.6 назад к фиг.1 пружина 27 растяжения проявляет свое полное действие, прижимая заднюю торцевую поверхность 36 исполнительной детали 24 к упорной поверхности 37 со стороны корпуса ножа. В то же время управляющее плечо 34 Т-образной детали 30 все больше прижимается к управляющей поверхности SF управляющего кулачка 35, и при этом Т-образная деталь 30 продолжает выгибаться так, что соединительное плечо 33 стержня 32 прилегает к нижней продольной кромке 39 направляющего продолжения 18 и за счет этого смещает первичный соединительный элемент Р в положение готовности на небольшом расстоянии перед вторичным соединительным элементом S.
Фиг.4а в отношении функционального состояния, в принципе, соответствует фиг.4. Стержень 32 выполнен, однако, на фиг.4а иначе, поскольку он состоит, в целом, из проходящих под углом друг к другу, жестко соединенных между собой, образующих, в целом, приблизительно Z-образную форму жестких участков, а именно жесткого соединительного плеча 33, отогнутого относительно него среднего жесткого соединительного участка 44 и примыкающего к соединительному участку 44 жесткого управляющего плеча 34.
Средний соединительный участок 44 установлен посредством места G вращательного сочленения в задней части исполнительной детали 24. Образующее первичный соединительный элемент Р соединительное плечо 33 посредством пружины 41 растяжения прижато вниз к схематично показанной опоре А. В остальном функции на фиг.4а протекают аналогичным образом, как и на фиг.5 и 6, а также назад к фиг.1.
Вариант на фиг.4а дает то преимущество, что за счет жесткого выполнения стержня 32 через исполнительную деталь 24 в направлении x на лезвие 16 могут передаваться большие усилия, возникающие, например, при резком втыкании лезвия 16 в твердый картон.
В любом случае Т-образная деталь 30 на фиг.1-6 и жесткий стержень 32 на фиг.4а образуют соответственно двуплечий рычаг с самом широком смысле, содержащий плечо 33 (соединительное плечо) и плечо 34 (управляющее плечо). При этом место сочленения образовано либо гибкой ножкой 31 над местом 40 его зажима (фиг.1-6), либо местом G вращательного сочленения (фиг.4а).
Одна особенность варианта на фиг.4а состоит в том, что управляющее плечо 34 размещает в себе подвижный в обоих осевых направлениях x и z подпружиненный толкатель 43, который установлен с возможностью вдвигания в заднюю часть 25 заподлицо с ее торцевой поверхностью 36 с ходом AF буферной пружины 45 против ее возвратного усилия F.
С описанным вариантом на фиг.4а связана следующая функция.
По окончании резания режущая кромка 17 лезвия 16 теряет свой контакт с разрезаемым материалом, пружина 20 растяжения втягивает лезвиедержатель 14 в его отведенное назад положение, как это видно на фиг.5 и 6. Пружины 20 и 27 растяжения для упрощения чертежа на фиг.4а не показаны, однако, как изображено на фиг.1-6, также имеются.
Незадолго до достижения изображенной на фиг.4а исполнительной деталью 24 (см. фиг.6) своего отведенного назад положения (см. фиг.1), в котором задняя торцевая поверхность 36 исполнительной детали 24 упирается в упорную поверхность 37 корпуса, свободный конец подпружиненного толкателя 43 упирается в упорную поверхность 37 корпуса.
При этом образующее первичный соединительный элемент Р соединительное плечо 33 поворачивается вверх к направляющему продолжению 18 лезвиедержателя 14 и сжимает расположенную в управляющем плече 34 буферную пружину 45 до тех пор, пока подпружиненный толкатель 43 полностью не скроется в управляющем плече 34 и одновременно в задней части 25 исполнительной детали 24. Во время этого хода вдвигания подпружиненного толкателя 43 также движущееся в направлении z отвода соединительное плечо 33 своим первичным соединительным элементом Р проходит вторичный соединительный элемент S. При этом соединительное плечо 33 удерживается в направленном вверх повернутом положении.
В начале нового движения выдвигания исполнительной детали 24 в направлении x буферная пружина 45 снова немного растягивается. При этом подпружиненный толкатель 43 выходит на определенную величину из управляющего плеча 34 и из задней части 25 исполнительной детали 24, вследствие чего первичный соединительный элемент Р из своего положения готовности (фиг.1) выдвигается вперед в направлении x во вторичный соединительный элемент S (фиг.2), тогда как подпружиненный толкатель 43 еще удерживает соединительное плечо 33 в его верхнем повернутом положении.
Из предшествующего описания видно, что у примера осуществления изобретения на фиг.4а упорная поверхность 37 корпуса одновременно образует управляющую поверхность SF.
Реферат
Изобретение относится к режущим устройствам и может быть использовано для резки. Нож содержит лезвие, лезвиедержатель и подвижную относительно него исполнительную деталь. Между указанной исполнительной деталью и лезвиедержателем расположен кинематический преобразователь. Указанный кинематический преобразователь при действии поперек на режущую кромку лезвия нажимом вызывает дополнительное относительное движение лезвиедержателем и исполнительной деталью независимо от выдвинутого положения лезвиедержателя, кинематически связанного с исполнительной деталью в направлении выдвигания. Дополнительное относительное движение обеспечивает отделение двух соединительных элементов, соединяющих между собой исполнительную деталь и лезвиедержатель только в направлении выдвигания. В результате обеспечивается возвращение лезвиедержателя в безопасное положение. 1 з.п.ф-лы, 6 ил.
Комментарии