Робот для неблагоприятных условий внешней среды - RU2525008C2
Код документа: RU2525008C2
Чертежи


Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к промышленному роботу, включающему в себя множество рук, выполненных с возможностью перемещения друг относительно друга вокруг множества сочленений, и электрические двигатели, обеспечивающие перемещение рук. Настоящее изобретение также относится к способу защиты промышленного робота от соленой воды.
Помимо вышеизложенного изобретение также относится к применению промышленного робота в морской нефтегазовой установке.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
В нефтегазовой области робототехника использовалась в основном только от случая к случаю. Нефтедобывающие компании постоянно стремятся создать и увеличить стоимость бизнеса, связанного с нефтегазовыми установками, при одновременной постоянной полной концентрации усилий на охране труда, технике безопасности и защите окружающей среды. Для решения данных проблем требуется значительное переосмысление вопросов, связанных с обычной работой и обслуживанием нефтегазовых установок. В достаточной степени документально подтверждено то, что промышленные роботы с гибкими манипуляторами хорошо подходят для выполнения опасных и трудоемких задач в опасных условиях с высокой степенью точности.
Обычные промышленные роботы не предназначены для применения в морских условиях. Даже несмотря на то, что существует тенденция создания робота для неблагоприятных условий внешней среды, обладающего свойствами взрывобезопасности, водостойкости и способностью выдерживать низкую температуру ниже точки замерзания, а также высокие температуры, по-прежнему сохраняется необходимость в решении задачи комбинирования всех из данных свойств и создания роботов, готовых для использования в морских условиях. Одна из основных серьезных проблем, требующих решения, - это создание робота, стойкого к воздействию соленой воды и особенно коррозии и других повреждений, вызываемых воздействием соленой воды.
Коррозия означает ухудшение существенных свойств материала вследствие химических реакций с окружающей его средой. В наиболее широко применяемом значении данного термина это означает потерю электронов металлов, вступающих в реакцию с водой и кислородом. Разупрочнение железа, вызванное окислением атомов железа, представляет собой хорошо известный пример электрохимической коррозии. Это широко известно как ржавчина. Данный тип разрушения обычно поражает металлические материалы и, как правило, вызывает образование оксида (оксидов) и/или соли (солей) исходного металла. Коррозия также включает растворение керамических материалов и может относиться к обесцвечиванию и ослаблению полимеров в результате воздействия солнечного ультрафиолетового излучения.
Большинство конструкционных сплавов корродируют просто вследствие подвергания их воздействию влаги в воздухе, но на данный процесс сильное влияние могут оказывать определенные вещества. Коррозия может быть сконцентрирована локально с образованием язвины или трещины, или она может распространяться на широкой зоне, в результате чего имеет место общее ухудшение свойств. В то время как некоторые усилия для уменьшения коррозии приводят только к тому, что повреждения приобретают менее видимые, менее прогнозируемые формы, регулируемая антикоррозионная обработка, такая как пассивирование и хроматирование, обеспечивает увеличение коррозионной стойкости материала.
Примеры разных типов коррозии:
общая коррозия,
точечная коррозия,
электрохимическая коррозия.
Кроме того, робот должен быть взрывобезопасным, что означает, что он должен выделять ограниченное количество энергии и тепла в электродвигателях для избежания искр. Кроме того, робот-манипулятор должен быть сертифицирован по IP67, что означает, что он полностью защищен от проникновения пыли (включая другие объекты малого размера) и он является водостойким (никакого проникновения воды при погружении на глубину до 1 метра).
В завершение, робот должен быть защищен от воздействий со стороны экстремальных температур (высоких и/или низких) и ветра. Защита может состоять в наличии покрытия (покрытий) (таких, как предусмотренные для роботов, сертифицированных по IP67), избыточного давления в двигателях и/или нагрева/охлаждения двигателей. В альтернативном варианте защита роботов может быть выполнена в виде нагревательных/охлаждающих рубашек, которые также могут быть водостойкими (робот-манипулятор также может быть водонепроницаемым с защитой от конденсации и т.д.).
ЗАДАЧИ И СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задача настоящего изобретения состоит в разработке робота для неблагоприятной внешней среды.
Данная задача решается посредством робота, выполненного с возможностью обеспечения стойкости по отношению к воздействию соленой воды в суровых атмосферных условиях.
В соответствии с одним аспектом изобретения данная задача решается посредством способа, включающего регулярное смывание соленой воды с робота.
Дополнительные усовершенствования устройства отличаются признаками дополнительных пунктов формулы изобретения.
В данном изобретении описан проверенный для суровых атмосферных условий манипулятор, разработанный для суровых атмосферных условий при концентрации усилий на обеспечении его защищенности от коррозии и других повреждений, вызываемых соленой водой. Новизна данного способа заключается в том, что робот-манипулятор представляет собой стандартизированный промышленный робот с электродвигателями, который дополнительно усовершенствован для работы в суровых климатических условиях, в которых он подвергается воздействию соленой воды, которая может оказывать коррозионное воздействие на робот.
Предложено использовать робототехнику на нефтегазовых установках совместно с модернизацией технологического оборудования с преобразованием его в компактные стандартизированные технологические модули. В результате реализации данной новой концепции будет получено нефтегазовое оборудование с дистанционным управлением, выполненное с возможностью осуществления контроля, технического обслуживания и реализации обычных рабочих заданий и, следовательно, обеспечивающее улучшение решения вопросов, связанных с охраной здоровья, охраной труда и техникой безопасности, то есть уменьшение остроты или устранение проблем, связанных с безопасностью рабочих мест. Кроме того, необходимость в удобствах/оборудовании для персонала в открытом море будет радикально уменьшена, что означает уменьшенный вес платформы и меньшие инвестиционные расходы. Кроме того, данное технологическое решение создает возможность уменьшения эксплуатационных расходов, в результате чего увеличивается срок рентабельной эксплуатации оборудования.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Варианты осуществления изобретения будут описаны далее только в качестве примера с конкретной ссылкой на сопровождающие чертежи, на которых:
фиг.1 представляет собой изображение промышленного робота, смонтированного на направляющем рельсе или портале, при этом показанный пример относится к нефтедобывающей платформе в соответствии с одним вариантом осуществления изобретения;
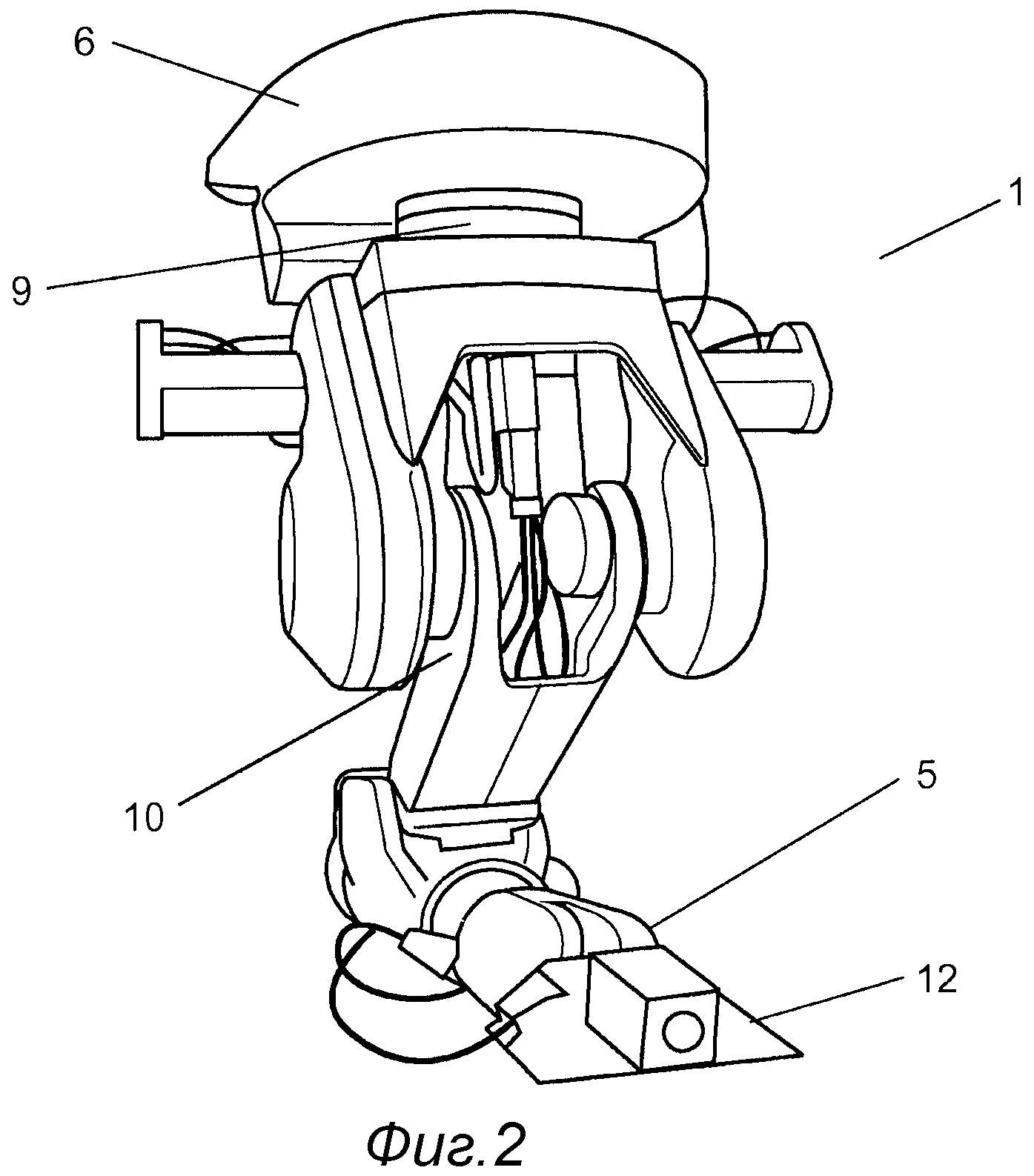
фиг.2 представляет собой изображение промышленного робота, смонтированного на направляющем рельсе или портале, показывающее крупным планом руку робота, выполненную с камерой, в соответствии с другим вариантом осуществления изобретения;
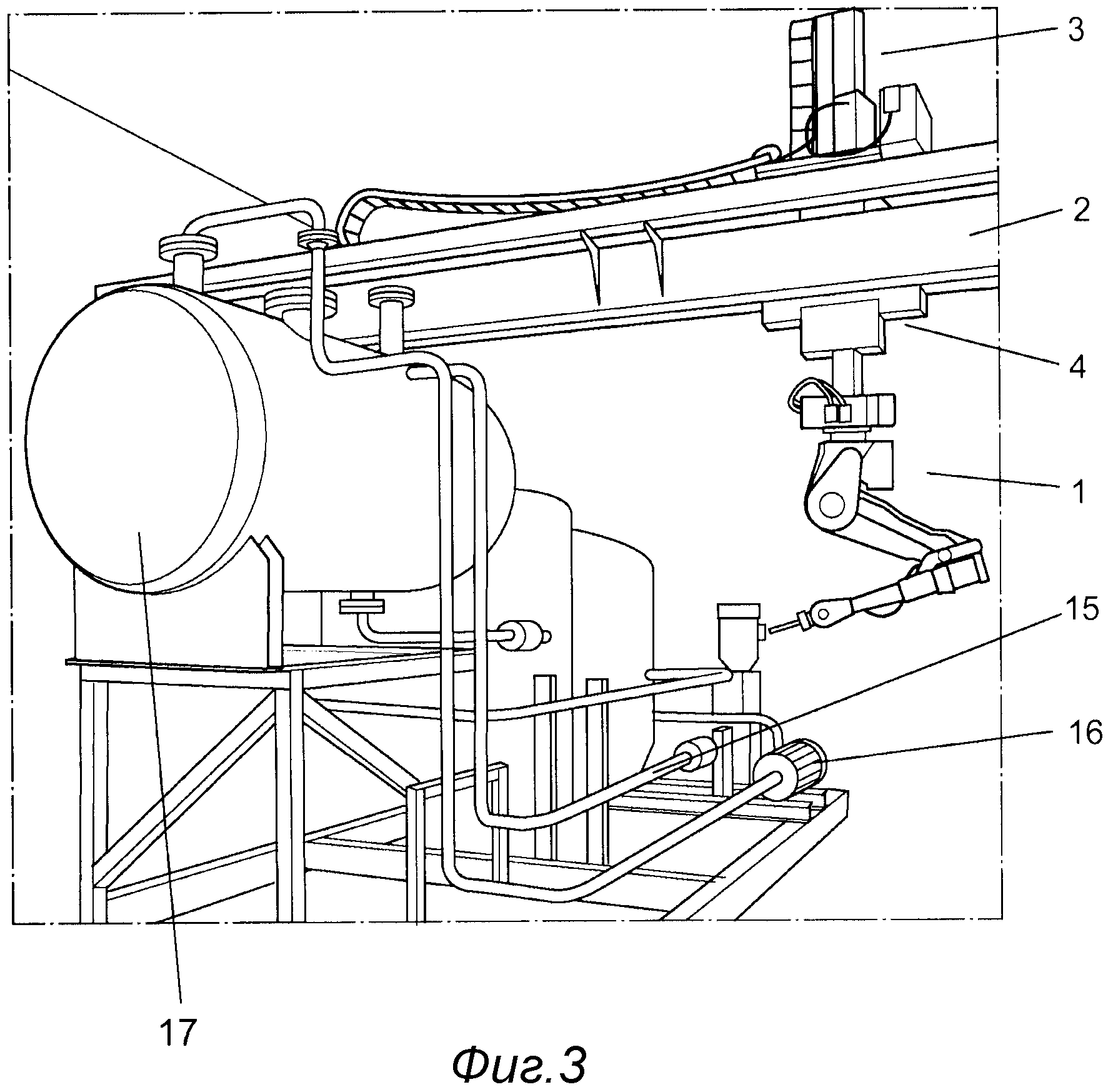
фиг.3 представляет собой изображение промышленного робота, смонтированного на направляющем рельсе или портале, выполненного с возможностью контроля или мониторинга, или технического обслуживания технологической секции с резервуаром, насосами и трубопроводами, относящимися к нефтедобывающей платформе, в соответствии с еще одним вариантом осуществления изобретения;
фиг.4 представляет собой изображение промышленного робота с показанными компонентами робота, приспособленными для обеспечения стойкости к воздействию неблагоприятной внешней среды, в соответствии с еще одним вариантом осуществления изобретения;
фиг.5 представляет собой схематическое изображение промышленного робота, смонтированного на направляющем рельсе или портале, показывающее камеру для смывания, в которую робот может быть перемещен для мойки и/или нанесения на него покрытия из антикоррозионной текучей среды, в соответствии с еще одним вариантом осуществления изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Основным преимуществом новой идеи является значительное уменьшение капитальных затрат, эксплуатационных расходов и продолжительности строительства. Для достижения этого существенными являются следующие решения и технологии:
модульная технология («Lego»), предназначенная для взаимодействия с роботизированной технологией,
компактное технологическое оборудование,
использование портальных кранов,
использование расположенного на суше оборудования для управления,
подвижные платформы (для избежания системы подмостей, многочисленных платформ),
использование робототехники для операций, связанных с техническим обслуживанием, контролем, обеспечением безопасности и логистикой,
технические средства визуализации для обеспечения поддержки во время проектирования, строительства и эксплуатации с приданием особого значения применению робототехники.
Данное изобретение относится к способу защиты промышленного робота от соленой воды и, в частности, коррозии и других потенциальных повреждений вследствие подвергания его воздействию соленой воды. Рука манипулятора и кабель между манипулятором и управляющим устройством подвергаются воздействию неблагоприятной внешней среды. Управляющее устройство и подвесной пульт обучения робота могут быть встроены в защитный кожух или защищены иным образом и могут удерживаться на удалении от соленой воды. В частности, имеются два компонента робота, которые требуют защиты, поскольку данные компоненты уязвимы по отношению к коррозии и могут иным образом повреждаться от воздействия соленой воды. Данными компонентами являются сама рука робота и сочленения, включая двигатели, подшипники и т.д. Обычные руки манипуляторов часто изготовлены из металла, который может корродировать и/или окисляться. Нержавеющая сталь, пластик или другие композиционные материалы позволяют избежать данной проблемы. Сочленения, включающие в себя двигатели и подшипники, также крайне необходимо защищать от соленой воды. Коррозия представляет собой проблему, но кристаллы соли также могут повреждать подшипники и другие механические конструкции при попадании в них. В отличие от (мелкой) пыли кристаллы соли имеют большие размеры и имеют разную форму. Кристаллы могут, например, оседать в виде слоя внутри подшипников и предотвращать свободное качение шариков. В других применениях объекты малого размера не создают подобных проблем.
Фиг.1 показывает промышленный робот 1, смонтированный с подвешиванием его на направляющем рельсе 2 или портале и выполненный с возможностью монтажа его на каретке 4, которая выполнена с возможностью перемещения вдоль портала, показанного стрелкой X. Промышленный робот 1 представляет собой робот шестиосного типа. Фиг.1 показывает основание 6, на котором удерживается ось первого сочленения, и показывает держатель 5 для инструментов на конце руки робота. Кабели 3 выполнены и расположены соответствующим образом для обеспечения возможности перемещения робота вдоль портала взад и вперед по оси Х портала.
Фиг.2 показывает промышленный робот 1, который имеет первое сочленение 9 на основании 6, которое обеспечивает возможность поворота вокруг вертикальной оси. Показано также сочленение 10. Металлические компоненты сочленений, которые открыты для воздействия воздуха, могут быть покрыты металлическими сплавами или тонкими пленочными покрытиями для обеспечения стойкости к коррозии, вызываемой соленой водой. Металлические сплавы или тонкие пленочные покрытия могут содержать сплавы или соединения, содержащие металлы, такие как титан, хром или никель. Рука промышленного робота 1 или рука манипулятора имеет камеру 12, смонтированную на держателе 5 для инструментов. Камера выполнена с возможностью воспроизведения изображения в центре инструмента или вокруг центра инструмента для оператора системы дистанционного управления и может быть выполнена с возможностью перемещения для наведения или фокусировки на объектах, находящихся в других местах.
Фиг.3 показывает испытательную установку для технологической секции, пригодной для установки для извлечения или добычи нефти и газа. Она показывает резервуар 17, технологические трубопроводы 15, насос 16 и промышленный робот 1, смонтированный на портале 2 над технологической секцией. Таким образом, робот может быть перемещен в разные места в технологической секции для наведения камеры в целях осмотра или для выполнения ограниченного диапазона задач технического обслуживания.
Фиг.4 показывает промышленный робот, приспособленный для обеспечения стойкости к воздействию неблагоприятной внешней среды. Данная фигура показывает, что приводные двигатели, предназначенные для перемещения каждого компонента руки, могут быть выполнены в виде герметизированных опрессованных двигателей 21 для предотвращения проникновения окружающего воздуха в двигатели для уменьшения риска пожара или взрыва. Уравновешивающее устройство 23 также может быть герметизировано опрессовкой. Открытые для воздействия металлические компоненты робота покрыты коррозионно-стойким слоем, таким как трехслойное эпоксидное покрытие 22, для защиты компонентов от коррозии или другого химического воздействия. Электронные компоненты 26 изолированы от окружающей среды. Компоненты рук или сочленений выполнены с закрывающими элементами 25 из нержавеющей стали. Запястье 24, которое обычно удерживает держатель для инструментов или инструмент, представляет собой запястье с коррозионно-стойкими металлическими компонентами и подшипниками, герметично закрытыми от проникновения воды или пыли.
Фиг.5 схематически показывает камеру W для мойки и/или нанесения покрытия, предназначенную для промышленного робота. Камера может содержать ограждение 31, показанное здесь в виде прямоугольного отсека пунктирными линиями. Данный «прямоугольный отсек» может быть открыт и может иметь шторки или дверцы для закрытия камеры. Моечные головки или распылительные головки 32, 33 и т.д. выполнены с возможностью мойки промышленного робота. Могут быть использованы различные смывочные текучие среды. Одно или несколько воздушных сопел также могут быть включены для сдувания грязи и соли и/или для сушки робота. Покрытия могут быть нанесены посредством использования одной или нескольких неподвижных или подвижных распылительных головок в моечной камере W. Коррозионно-стойкие покрытия могут быть нанесены в виде жидкости, эмульсии или гелеобразного слоя. Ниже описаны покрытия, стойкие к воздействию соленой воды.
В данном изобретении описаны три разных подхода в отношении того, как защищать робот от соленой воды, при этом указанные подходы заключаются в:
избегании соленой воды,
обеспечении возможности поступления соленой воды,
защите посредством соленой воды.
Первый подход связан с защитой робота от непосредственного воздействия соленой воды на него. Способы для реализации данного подхода включают нанесение разных типов покрытий и образование других физических барьеров между роботом и соленой водой.
Второй подход обеспечивает возможность входа соленой воды в (ограниченный) контакт с роботом. Данные способы включают периодическую очистку компонентов, которые были подвергнуты воздействию соленой воды.
В способах третьего типа применяется необычный подход, поскольку цель данных способов состоит в защите робота посредством соленой воды. Существуют различные виды коррозии. Помимо электрохимической коррозии как (соленая) вода, так и воздух, входящие в контакт с металлической поверхностью, приводят к коррозии.
В нижеприведенном перечне представлены различные способы защиты робота:
1) непроницаемое по отношению к соленой воде покрытие и/или пленка;
2) кожухи/рубашки для робота;
3) наночастицы для отталкивания воды;
4) резиновые покрытия вокруг сочленений и других входных/выходных элементов;
5) воздух под избыточным давлением внутри руки робота;
6) камера для нанесения покрытия на робот, предназначенная для регулярного нанесения нового покрытия/пленки на робот;
7) роботизированное устройство для нанесения покрытия;
8) камера для мойки робота, предназначенная для регулярного смывания соленой воды;
9) роботизированное устройство для мойки;
10) воздушные сопла для сдувания грязи, включающей в себя кристаллы соли;
11) покрытие, состоящее из наночастиц, которые «связывают» кристаллы соли так, чтобы обеспечить непрерывное покрытие робота-манипулятора тонким слоем соленой воды.
Несколько из предложенных способов могут быть применены для робота для защиты всех компонентов надлежащим образом от разных типов повреждений и проблем, вызванных подверганием его воздействию соленой воды.
1: Данное решение предполагает окрашивание/нанесение на руку робота и другие компоненты робота слоя покрытия или пленки, который/которая является стойким/стойкой к воздействию соленой воды. Подобное покрытие позволяет предотвратить вход соленой воды в контакт с материалом руки робота и попадание соленой воды в руку робота. Подобный слой покрытия, как правило, будет повреждаться, когда на поверхности (например, на слое покрытия) образуется царапина. На поверхности нержавеющей стали имеется тонкая пленка, которая защищает ее от окисления.
2: Кожух или рубашка для робота закрывает всю руку манипулятора и защищает руку от соленой воды. Кроме того, кожух робота может также обеспечивать защиту от пыли, ветра, воды и т.д. Кожух робота может обеспечить дополнительную функциональность, такую как нагрев и/или охлаждение. Кроме того, воздух под избыточным давлением внутри кожуха робота предотвращает увлажнение.
3: В соответствии с данным способом предлагается покрывать руку манипулятора слоем наночастиц, которые отталкивают соленую воду и предотвращают прилипание кристаллов соли к поверхности.
4: Данный способ связан с тем, как защитить сочленения от проникновения соленой воды. Резиновое покрытие или гармошку, которая является эластичной и повторяет движения робота, устанавливают вокруг каждого сочленения и приклеивают/приваривают к руке робота для избежания проникновения соленой воды. Данный способ может быть использован в комбинации с другими способами для защиты руки робота от коррозии, а также для избежания появления водяного конденсата/влаги внутри руки робота.
5: Вместо «герметизации» сочленений в соответствии с данным способом предлагается подавать воздух под избыточным давлением внутрь руки робота для избежания проникновения/попадания воды и в особенности соленой воды (и других малых частиц) через сочленения и другие отверстия малого размера, такие как вводы и выводы кабелей (электрических, для воздуха (для пневматических систем), текучих сред и т.д.). Аналогичным образом, воздух обеспечит предотвращение появления влаги внутри руки робота. Другая возможная функция воздуха заключается в регулировании температуры воздуха для поддержания ее в определенных пределах в случае или очень низких, или очень высоких температур наружного воздуха.
6: Данный способ базируется на принципе «машины для мойки автомобилей». Камера W для нанесения покрытий, в которую робот входит регулярно, обеспечивает напыление нового покрытия/пленки на поверхность. Предварительное условие заключается в том, что покрытие/пленка должно(-а) быть образовано(-а) заново и что оно (она) является экологически приемлемым(-ой) и недорогим (недорогой), что позволяет использовать его (ее) регулярно. Камера для нанесения покрытия может быть выполнена с формой прямоугольного отсека с минимальными внутренними размерами робота. В альтернативном варианте она может представлять собой трубу с длиной и размерами руки робота. Когда робот освободится от других заданий, он входит в камеру для нанесения покрытий (регулярно, но не слишком часто) и получает новое покрытие.
7: Вместо камеры в соответствии с данным способом предлагается, чтобы роботы наносили покрытие друг на друга. Это требует того, чтобы по меньшей мере два робота были освобождены от других работ одновременно. Один из роботов захватывает пистолет-распылитель и осуществляет распыление/«окраску» другого робота и наоборот (в том случае, если оба робота нуждаются в новом покрытии). Для избежания каких-либо экологических проблем, связанных с распылением, оно может происходить в специальной (защищенной) зоне, в которой могут скапливаться отходы при нанесении покрытий.
8: В том случае если рука манипулятора подвергается воздействию только ограниченного количества соленой воды или влаги/влажной среды, включающей в себя соль, решение заключается в использовании системы водяной очистки робота. Камера W для мойки робота, базирующаяся на принципе «машины для мойки автомобилей», представляет собой камеру, аналогичную той, которая описана в способе 6. Вместо нанесения нового слоя покрытия/пленки в данной камере осуществляется очистка руки манипулятора чистой водой, со временем с добавленным моющим средством, для поддержания поверхности в чистом состоянии и свободной от кристаллов соли.
9: Аналогично способу 7, данный способ «описывает», как использовать сам робот для водяной очистки другого робота в качестве альтернативы «камере для мойки робота».
10: В соответствии с данным способом предлагается использовать воздушные сопла для сдувания соленой воды и в особенности кристаллов соли с поверхности робота-манипулятора. Воздушные жиклеры могут быть расположены внутри камеры W, подобной предложенной в способах 6 и 8.
11: Вместо избегания воздействия соленой воды в данном способе используется другой подход, поскольку в соответствии с ним предлагается покрывать руку манипулятора слоем наночастиц, которые «связывают» соленую воду. В этом случае вся поверхность робота будет покрыта слоем соленой воды, но не будет открыта для воздействия воздуха. Это может обеспечить предотвращение возникновения некоторых видов коррозии.
В соответствии с изобретением описан проверенный в неблагоприятных условиях манипулятор, разработанный для неблагоприятной внешней среды при концентрации усилий на обеспечении его защищенности от коррозии и других повреждений, вызываемых соленой водой. Робот-манипулятор представляет собой стандартизированный промышленный робот с электродвигателями, который дополнительно усовершенствован для работы в неблагоприятной внешней среде, в которой он подвергается воздействию соленой воды. Рука манипулятора и кабель между манипулятором и управляющим устройством подвергаются воздействию неблагоприятной внешней среды. В частности, все отверстия, включая сочленения, кабели и трубы, проходящие сквозь поверхность, очень важно защитить для избежания попадания соленой воды или влаги, образованной соленой водой, во внутреннюю часть руки робота. Управляющее устройство может быть встроено в защитный кожух и удерживаться в месте с менее неблагоприятной внешней средой. В данном изобретении предлагаются несколько разных способов защиты робота-манипулятора от коррозии. По существу, наиболее интенсивная коррозия, вызванная солью, возникает там, где металл подвергается комбинированному воздействию соленой воды и воздуха. Материал, постоянно полностью покрытый соленой водой, менее уязвим для коррозии. Изобретение базируется на трех разных подходах к решению проблемы: предотвращать контакт между соленой водой и роботом или уязвимыми компонентами робота, обеспечивать возможность контакта между соленой водой и роботом и постоянно подвергать робот воздействию соленой воды. Некоторые способы могут обеспечить защиту или руки робота от коррозии, или сочленений от кристаллов соли.
В соответствии с данным изобретением описан проверенный в неблагоприятной внешней среде робот-манипулятор с дистанционным управлением, предназначенный для использования в средах, которые обычно являются опасными, труднодоступными для людей и/или такими, в которые доступ людей невозможен.
Контроль инфраструктуры на морских установках
Планируется, что будущие морские установки будут (частично) безлюдными. Технологический процесс перерабатывается с реализацией его посредством стандартизированных технологических модулей, устанавливаемых друг на друга на технологических рельсах/мостках. Некоторое количество роботов смонтировано на (по меньшей мере) двух портальных кранах, которые обеспечивают возможность полного доступа ко всему технологическому процессу. Данные роботы управляются дистанционно с суши (или с соседней платформы или судна). Поскольку операторы на месторождениях будут удалены с платформы, операторам, находящимся в центре управления, по-прежнему необходимо будет контролировать технологическое оборудование и инфраструктуру, и они будут использовать роботы для данной задачи. Некоторые из задач осмотра/контроля выполняются автоматически, в то время как другие требуют вмешательства человека. Управление выполнением некоторых заданий может осуществляться дистанционно одним или несколькими людьми на суше, на судне и/или на другой платформе. Элементы для управления и/или связи могут быть расположены в удаленном месте, где люди могут дистанционно управлять роботами и иметь связь с ними. Подобное дистанционное управление может осуществляться при любом числе заданий. Например, управление роботами, включающими в себя один или несколько защитных элементов и включенными в установку, предназначенную для извлечения или добычи нефтепродуктов, и выполненными с возможностью выполнения команд по мониторингу и техническому обслуживанию, может осуществляться дистанционно людьми на судне, на суше и/или на другой платформе. Робот(-ы) может (могут) удерживать различные датчики, такие как камеры 12 (видео-, инфракрасные и т.д.), датчик температур, датчики вибрации, детекторы присутствия газа и т.д. Роботы могут подвергаться воздействию неблагоприятной внешней среды, включая риск взрывов, (соленую) воду, экстремальные температуры и ветер.
Легкие операции по техническому обслуживанию на морских установках
Данный сценарий базируется на такой же концепции, как описанная выше. Робототехническая система дополнительно настроена для выполнения легких задач по техническому обслуживанию на технологическом оборудовании, таких как замена звена трубопровода/отрезка трубы или клапана и установка и сбор беспроводной контрольно-измерительной аппаратуры. Роботы подвергаются воздействию неблагоприятной внешней среды, включая риск взрывов, (соленую) воду, экстремальные температуры и ветер.
Отбор проб на морских установках
На морской буровой установке и/или установке для добычи существует большая потребность в отборе проб. На некоторых существующих платформах сталкиваются с очень густой нефтью, почти подобной смоле. Проверенный в неблагоприятной внешней среде робот может выполнять отбор проб и обеспечить автоматизированное выполнение данной работы для уменьшения риска для людей. Робот для данного сценария подвергается воздействию неблагоприятной внешней среды, включая риск взрывов, (соленую) воду, экстремальные температуры и ветер.
Бурение и другие операции на месторождениях на суше с высоким содержанием сульфатов
Некоторые нефтяные и газовые месторождения на суше содержат сульфат, что делает невозможной для людей работу в незащищенном состоянии в данных зонах. Существует потребность в решениях с использованием робототехники для контроля и различных эксплуатационных задач для обеспечения возможности работы в подобных зонах. Роботы подвергаются воздействию неблагоприятной внешней среды, включая различные химические соединения. Робот-манипулятор может быть защищен от таких химических соединений на основе одного или нескольких из предложенных способов.
Операции по контролю и техническому обслуживанию морских ветроэнергетических установок
Другим применением в морских условиях является выполнение задач по контролю и техническому обслуживанию морских ветроэнергетических установок. Большинство задач может быть выполнено внутри корпусов ветроэнергетических установок, но влажный воздух будет по-прежнему содержать кристаллы соли.
В соответствии с данным изобретением описано некоторое количество способов защиты руки робота от коррозии и защиты сочленений от попадания соленой воды. Один или несколько способов могут быть использованы в комбинации для обеспечения полной защиты. Изобретение обеспечивает возможность выполнения работ в неблагоприятной внешней среде в открытом море. Изобретение обеспечивает расширение применения существующей конфигурации промышленного робота с электродвигателями до применения в морских условиях или аналогичных атмосферных условиях, связанных с проблемами коррозии.
Реферат
Настоящее изобретение относится к промышленному роботу, приспособленному к воздействию соленой воды, вызванному неблагоприятной внешней средой. Промышленный робот содержит руку робота с множеством компонентов руки, выполненных с возможностью перемещения друг относительно друга вокруг множества сочленений, и электрические двигатели, обеспечивающие перемещение компонентов руки. При этом по меньшей мере некоторая часть наружной поверхности компонентов руки робота выполнена со стойким к воздействию соленой воды покрытием, содержащим наночастицы. Изобретение позволяет обеспечить работу робота с дистанционным управлением в средах, которые являются опасными, труднодоступными для людей и/или такими, в которые доступ людей невозможен. 4 н. и 15 з.п. ф-лы, 5 ил.
Комментарии