Урановешенный манипулятор - SU848350A1
Код документа: SU848350A1
Чертежи

Описание
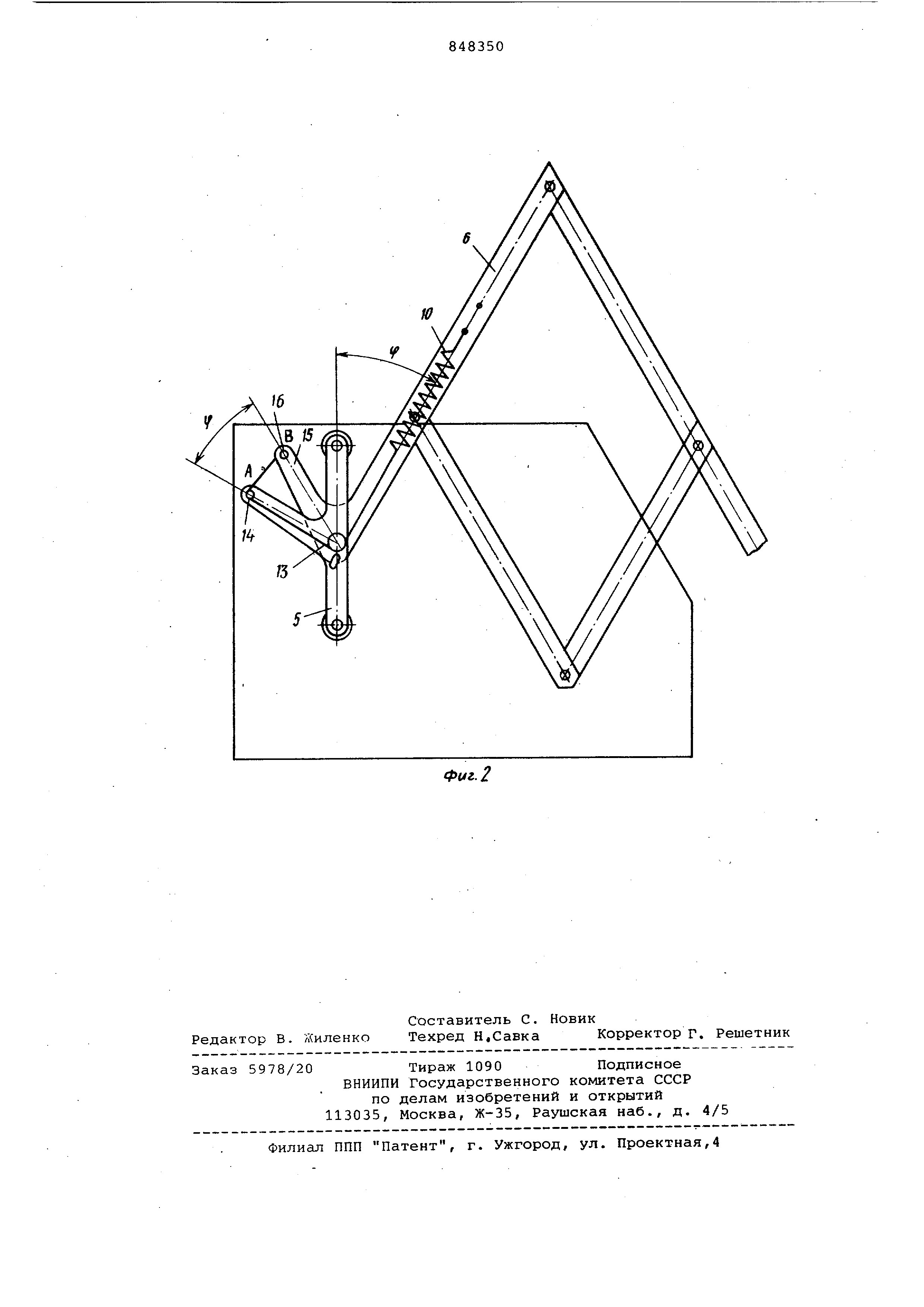
Изобретение относится к машиностроению и может быть использовано в погрузочных манипуляторах и промыш ленных роботах. Известен уравновешенный манипулятор , содержащий шарнирно-рычажный механизм пантографа и пружину связанную одним концом с ведущим зве: ном пантографа,, а, другим - с гибким элементом трособлЬчной системы,причем ведущее звено пантографа шарнир но связано с кареткой вертикального перемещения осью IJJ . Недостатком такого- манипулятор а является сложность уравновешивания конструкции. Цель йз.обретения - упрощение конс/грукции. 1йль достигается тем, что один и блокой трособлочнбй систекы смонтирован на оси шарнирной связи каретк с ведущим звеном пантографа, а второй - на каретке, причем гибкий элемент трособлочной системы охватывает блоки и связан с ведущим звеном пантографа. На фиг. 1 изображен уравновешенн манипулятор, общий вид; на фиг. 2 схема установки пружины. . .На колонне 1 Е ее верхней части установлены две щеки 2, на внутренних стенках которых предусмотре.ны вертикальные направляющие 3 и горизонтальные , направляющие 4. В вертиксшьных направляющих на роликах установлена каретка 5, шарнирно связанная с ведущим звеном б шарнирно-рычажного механизма пантографа. Каретка связана с приводом вертикального перемещения (не показан). В состав пантографа входят рычаги 7,8 и 9. На конце рычага 7 устанавливается блок для удержания груза. На оси соединения рычаго в 8 и 9 установлены ролики, которые помещаются в горизонтальных направляющих 4. Пружина 10, уравновешивающая рычаги, крепится на ведущем звене 6 пантографа в точке 11. Второй ее конец закреплен, на гибком элементе трособлочной системы тросе 12, который перекинут через блоки 13 и .14 трособлочной системы н закреплен на кронштейне 15 (в точке 16), жестко связанном с ведущим звеном 6. Блок 13 установлен на оси шарнирного присоединения ведущего звена б пантографа к каретке 5. Ось блока 14 закреплена на карет- ке 5. Устройство работает следунвдим образом. В исходном положении пружина на ходится в свободном состоянии. При этом точка В крепления троса к кро штейну 15 звена 6 и центр А блока 14, установленного на каретке 5 лежит на одной прямой с осью шарни ного присоединения ведущего эвена к каретке5. При повороте эвена 6 на угол ф тот же угол поворачивается кронште 15 относительно каретки 5, вызывая удлинение пружины. Таким образом, при обеспечении полной балансировки шарнирно-рычаж ного механизма получается более простая конструкция манипулятора. Формула изобретения Уравновешенный манипулятор, содержащий шарнирно-рычажный механизм 50 пантографа и пружину, связанную одним концом с ведущим звеном пантографа , а другим - с гибким элементом трособлочной системы, причем ведущее звено пантографа шарнирно связано с кареткой вертикального перемещения осью, отличающийся тем, что, с целью упрощения конструкции один из блоков трособлочной системы смонтирован на оси шарнирной связи каретки с ведущим звеном пантографа, а второй - на каретке, причем гибкий элемент трособлочиой систе№1 охватывает блоки и связан с ведущим звеном пантографа.«у-дига Источники информации, принятые во внимание при экспертизе 1. Патент Японии V 53-33180, кл. 83 F 51, опублик. 1978.

Реферат
Формула
Комментарии