Запястье руки робота с шарнирными сочленениями - RU2412045C2
Код документа: RU2412045C2
Чертежи


Описание
Настоящее изобретение относится к запястью руки робота с шарнирными сочленениями (шарнирного робота), содержащему:
- первый опорный элемент, подлежащий установке на элементе робота, выполненном с возможностью поворота вокруг первой оси;
- второй опорный элемент, смонтированный на указанном первом опорном элементе с возможностью поворота вокруг второй оси, расположенной под углом относительно указанной первой оси;
- первый двигатель, который удерживается указанным первым опорным элементом и вал которого соединен при повороте с указанным вторым опорным элементом через первую зубчатую передачу;
- третий опорный элемент, смонтированный на указанном втором опорном элементе с возможностью поворота вокруг третьей оси, расположенной под углом относительно указанной второй оси; и
- второй двигатель, вал которого соединен при повороте с указанным третьим опорным элементом через вторую зубчатую передачу.
Запястье руки робота указанного выше типа составило предмет патента Италии EP 0873826.
В известном решении, указанном выше, представлены все отличительные признаки, определенные ранее. Особым преимуществом указанного решения была возможность наличия доступных - в конструкции запястья - кабелей и/или трубопроводов для подачи электрической энергии и/или текучих сред к оборудованию, смонтированному на запястье самого робота. Для обеспечения такого признака два двигателя были смонтированы в зоне отвода первого опорного элемента, далеко от конца запястья, несущего оборудование. Вращательные движения, источником которых являются двигатели, передавались второму опорному элементу и третьему опорному элементу посредством передаточной системы, содержащей полые концентрические передаточные валы, которые имели на своих концах цилиндрические и конические зубчатые колеса, элементы для передачи движения и опорные элементы в виде подшипников качения.
Таким образом, изготовление запястья в соответствии с известным решением предусматривало использование большого числа компонентов, что делало передачу чрезвычайно дорогостоящей и сложной. Кроме того, на точность движений оказывало отрицательное влияние совмещение эффектов вследствие возможного зазора между элементами разных передач.
Для упрощения известного решения, описанного выше, предметом настоящего изобретения является запястье руки шарнирного робота указанного в начале типа, отличающееся тем, что указанный второй опорный элемент несет указанный второй двигатель.
Указанная определенная конструкция посредством «приближения» двигателей к соответствующим управляемым элементам создает возможность резкого уменьшения числа компонентов передачи, хотя при этом внутри запястья сохраняется свободной полость, предназначенная для пропускания кабелей и/или подающих трубопроводов.
В соответствии с особенно предпочтительным вариантом осуществления каждый двигатель передает движение соответствующему опорному элементу посредством использования одной зубчатой пары.
Дополнительные признаки и преимущества изобретения будут вытекать из последующего описания со ссылкой на приложенные чертежи, которые представлены исключительно в качестве неограничивающего примера и на которых:
фиг.1 - вертикальный вид примера варианта осуществления робота в соответствии с известным уровнем техники;
фиг.2 - боковое сечение первого варианта осуществления запястья робота в соответствии с изобретением;
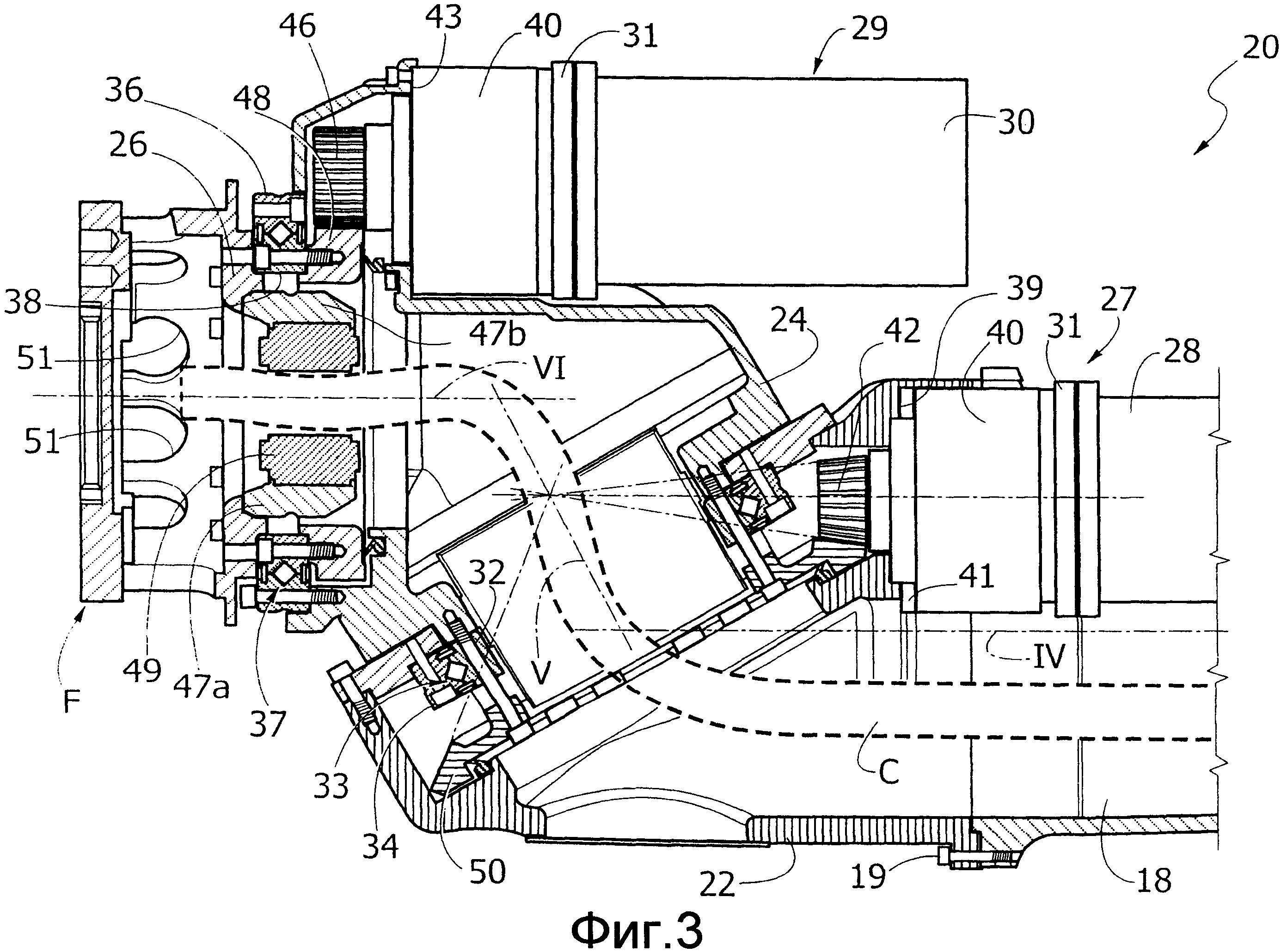
фиг.3 - боковое сечение второго предпочтительного варианта осуществления в соответствии с изобретением;
фиг.4 - вид сбоку третьего варианта осуществления в соответствии с изобретением;
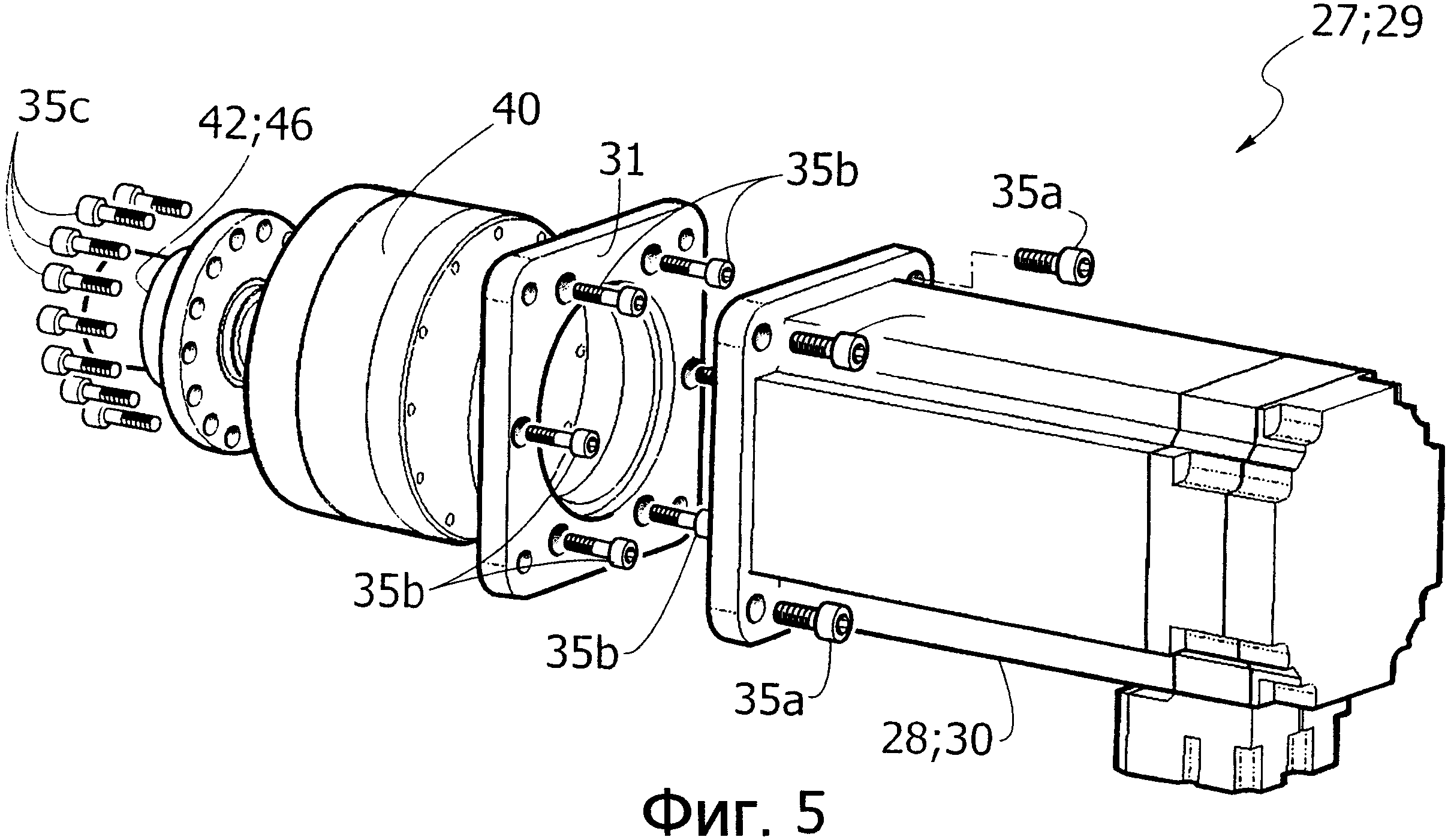
фиг.5 - выполненный с пространственным разделением элементов вид двигателя, зубчатого редуктора и подузла из шестерни и зубчатого колеса; и
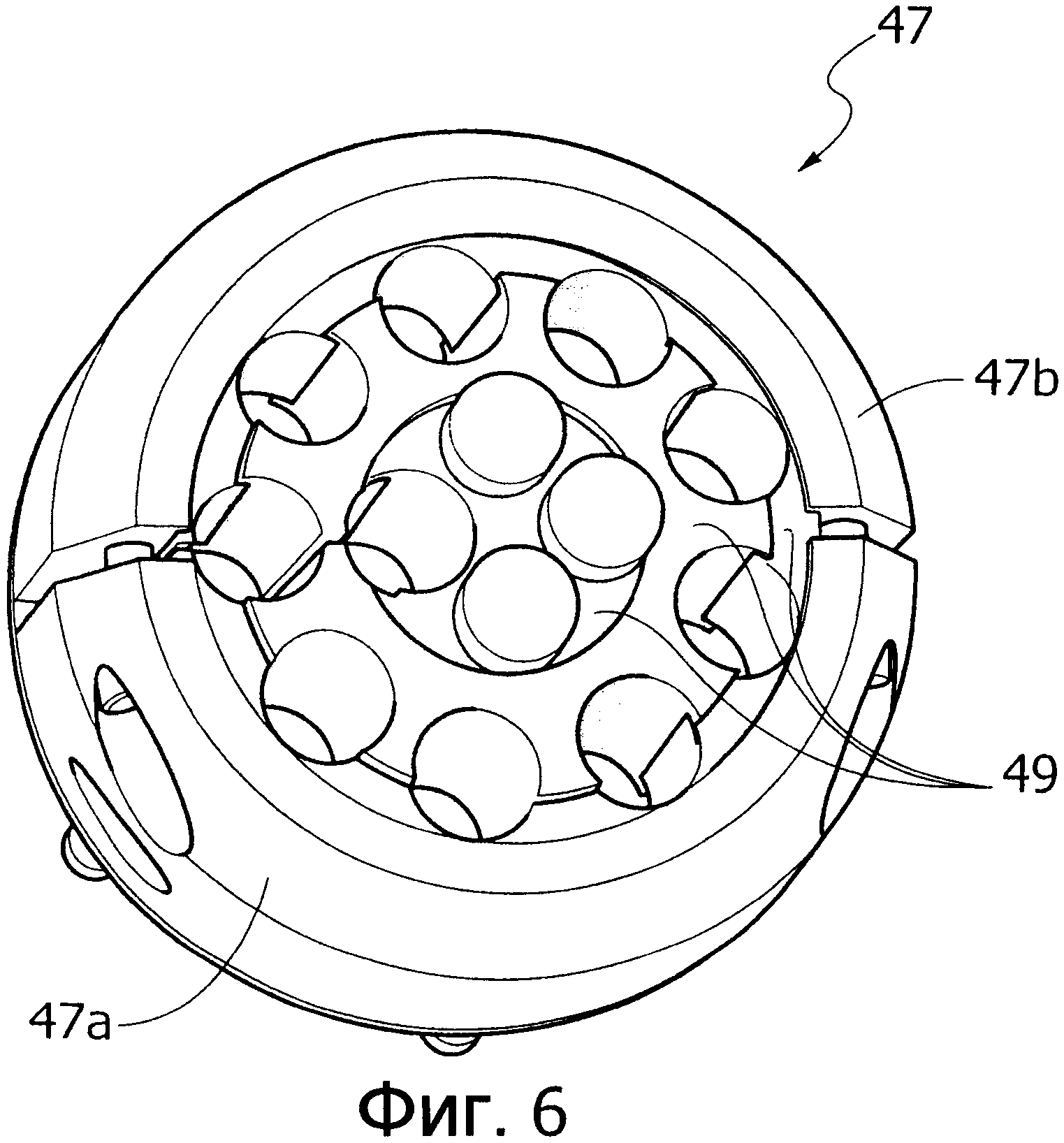
фиг.6 - вид вкладыша для размещения кабелей и трубопроводов внутри полости запястья для обеспечения питания элемента оборудования в соответствии с известным уровнем техники.
На фиг.1 представлен антропоморфный робот известного типа, для которого ниже описаны только его существенные части для определения сферы применения запястья в соответствии с изобретением, но очевидно, что указанное запястье может быть смонтировано также на других роботах.
В случае проиллюстрированного примера робот 10, представленный на фиг.1, имеет базовую конструкцию 12, которая служит опорой вертикальному элементу 13 с обеспечением возможности его поворота вокруг вертикальной оси I. Вертикальный элемент 13, в свою очередь, служит опорой вертикальной руке 14 с обеспечением возможности ее поворота вокруг горизонтальной оси II. Верхний конец вертикальной руки 14, в свою очередь, служит опорой конструкции 16 с обеспечением возможности ее поворота вокруг горизонтальной оси III, при этом конструкция 16 несет руку 18. Конструкция 16 служит опорой руке 18 с обеспечением возможности ее поворота вокруг оси IV, которая совпадает с главной осью руки.
Как показано на фиг.2, позиция 20 обозначает в целом запястье шарнирного робота. Запястье шарнирного робота образовано первым опорным элементом 22, жестко присоединенным к руке 18 робота посредством винтов 19. Первый опорный элемент 22 служит опорой второму опорному элементу 24, и второй опорный элемент 24 выполнен с возможностью поворота вокруг оси V, расположенной под углом относительно оси IV. В свою очередь, второй опорный элемент 24 несет третий опорный элемент 26 с обеспечением возможности его поворота вокруг оси VI, расположенной под углом относительно оси V.
В месте соединения между рукой 18 и первым опорным элементом 22 предусмотрена полость для размещения первого двигателя 28. В соответствии с размерами первого опорного элемента 22 и его цилиндрической части, которая должна быть присоединена к руке 18 робота, полость для размещения первого двигателя 28 может быть полностью выполнена в первом опорном элементе 22 или же также частично в руке 18 робота, но всегда таким образом, что первый двигатель 28 по существу будет содержаться в объемах, определяемых геометрическими формами руки 18 и первого опорного элемента 22, при этом особое значение имеют размеры поперечного сечения указанной руки. В месте, соответствующем второму опорному элементу 24, предусмотрена дополнительная полость для размещения второго двигателя 30.
Между первым опорным элементом 22 и вторым опорным элементом 24 установлен подшипник 33 качения известного типа, имеющий внутреннее кольцо 32, жестко присоединенное к первому опорному элементу 22, в то время как наружное кольцо 34 жестко присоединено ко второму опорному элементу 24. Дополнительный подшипник 37 качения предусмотрен между вторым опорным элементом 24 и третьим опорным элементом 26, при этом наружное кольцо 36 подшипника 37 качения жестко присоединено ко второму опорному элементу 24, и его внутреннее кольцо 38 жестко присоединено к третьему опорному элементу 26.
В соответствии с идеями Европейского патента № ЕР 0873826 заявителя по данной заявке с третьим опорным элементом соединен фланец F, предназначенный для крепления устройства, который имеет радиальные отверстия 51 для обеспечения возможности пропускания и распределения его питающих линий. Например, в том случае, когда устройство представляет собой сварочный пистолет для точечной электросварки, указанные линии содержат кабели для подачи электрической энергии к сварочным электродам, электрические кабели для передачи сигналов, выдаваемых датчиками, взаимодействующими со сварочными пистолетами, трубы для подачи сжатого воздуха к приводному устройству сварочных пистолетов (или возможные электрические кабели в случае сварочных пистолетов, приводимых в действие электродвигателями) и трубопроводы для подачи воды для охлаждения электродов.
На фиг.5 более детально проиллюстрированы способы монтажа каждого подузла 27, 29, образованного двигателем 28, 30, соединительным фланцем 31, зубчатым редуктором 40 и шестерней 42, 46. Для обеспечения высокого передаточного отношения с валами первого двигателя 28 и второго двигателя 30 соединены соответствующие зубчатые редукторы 40. Указанные зубчатые редукторы 40 вследствие ограничений на габаритные размеры и массу, которые обусловлены применением, предпочтительно представляют собой редукторы эпициклического или волнового типа.
Один из концов каждого зубчатого редуктора 40 присоединен к соответствующему двигателю 28, 30 посредством соединительного фланца 31. Соединительный фланец посредством винтов 35а присоединен к двигателю 28, 30 и к зубчатому редуктору посредством других винтов 35b. На другом конце зубчатый редуктор 40 несет шестерню 42, 46 для передачи движения, при этом указанная шестерня прикреплена к нему посредством множества винтов 35с. Каждый подузел 27, 29 подлежит установке в соответствующей полости, выполненной в первом опорном элементе 22 или во втором опорном элементе 24.
Первый подузел 27, который содержит первый двигатель 28, зубчатый редуктор 40 и коническую шестерню 42, закреплен посредством винтов так, что он опирается на нижнюю стенку 39 соответствующей полости. Между нижней стенкой 39 полости и концом зубчатого редуктора, к которому прикреплена коническая шестерня 42, установлен фланец 41 для крепления и регулировки зазора. Во время испытания запястья втулку 41 шлифуют для придания ей точной толщины для регулировки соприкосновения конусов, образующих передачу. Коническая шестерня 42 входит в зацепление с внутренними зубьями конического кольцевого зубчатого колеса 44, и данное зубчатое колесо, будучи прикрепленным посредством винтов (непоказанных) к наружному кольцу 34 подшипника 33, жестко присоединено ко второму опорному элементу 24.
Второй подузел 29, содержащий второй двигатель 30, зубчатый редуктор 40 и цилиндрическую шестерню 46, вставлен в полость, выполненную во втором опорном элементе 24, и прикреплен посредством винтов так, что он опирается на нижнюю стенку 43 указанной полости. Цилиндрическая шестерня 46 входит в зацепление с кольцевым зубчатым колесом 48, которое прикреплено к внутреннему кольцу 38 подшипника 37 качения.
Вращательное движение, источником которого является двигатель 28, преобразуется посредством зубчатого редуктора 40 и передается конической шестерне 42, которая вызывает вращение конического зубчатого колеса 44 с внутренними зубьями, жестко присоединенного к наружному кольцу 34 подшипника 33, которое, в свою очередь, прикреплено ко второму опорному элементу 24. Таким образом обеспечивается поворот второго опорного элемента 24 вокруг оси V.
При приведении в действие второго двигателя 30 вращение передается посредством зубчатого редуктора 40 цилиндрической шестерне 46. Цилиндрическая шестерня 46 входит в зацепление с кольцевым зубчатым колесом 48, которое жестко присоединено к внутреннему кольцу 38 и к третьему опорному элементу 26. Таким образом обеспечивается поворот третьего опорного элемента 26 вокруг оси VI.
Внутренняя полость запястья обеспечивает возможность пропускания кабелей и/или трубопроводов С для питания устройства (непоказанного), которое должно быть соединено с фланцем F. Указанные кабели и/или трубопроводы С подготавливают перед монтажом проводов робота, при этом к нему присоединяют вкладыш 47 (проиллюстрированный на фиг.6), образованный двумя половинами 47а, 47b вкладыша. Две половины 47а, 47b вкладыша в собранной конфигурации образуют перфорированные резиновые кольца 49, которые служат опорой кабелям и/или трубопроводам С внутри самого вкладыша 47. Монтаж проводов робота выполняют посредством вставки вкладыша 47 в руку 18 робота, через первый и второй опорные элементы 22, 24 запястья до третьего опорного элемента 26, в котором наклонные поверхности взаимодействуют с аналогичными поверхностями вкладыша 47 для обеспечения центрирования. В завершение, вкладыш 47 жестко крепят к третьему опорному элементу 26 посредством винтов.
Фиг.3 показывает другой предпочтительный вариант осуществления изобретения. Структура запястья и расположение компонентов остаются в основном идентичными варианту осуществления по фиг.2, но отличаются от данного варианта осуществления по существу только в отношении формы пары конических зубчатых колес для обеспечения передачи между первым двигателем 28 и вторым опорным элементом 24. В указанной паре конических зубчатых колес в случае варианта осуществления по фиг.3 коническое зубчатое колесо 44 с внутренними зубьями заменено коническим зубчатым колесом 55 с наружными зубьями. В данном варианте осуществления предполагается, что внутреннее кольцо 32 подшипника 33 присоединено ко второму опорному элементу 24, в то время как наружное кольцо 34 присоединено к первому опорному элементу 22.
В завершение, на фиг.4 проиллюстрирован дополнительный вариант осуществления запястья шарнирного робота в соответствии с изобретением. Данный дополнительный вариант осуществления имеет особенность, заключающуюся в том, что первый опорный элемент 22 несет первый двигатель 28 так, что главная ось М двигателя 28 параллельна оси V поворота второго опорного элемента 24 относительно первого опорного элемента 22. Указанная конфигурация, в отличие от предыдущего варианта осуществления, обеспечивает возможность применения ее также для первой передачи из пары кольцевых зубчатых колес (непроиллюстрированной).
Для регулирования поворота второго опорного элемента 24 вокруг оси V можно выбрать пару кольцевых зубчатых колес при одновременном сохранении параллельности оси двигателя 28 оси IV, как в случае фиг.2 и 3. В данном случае два кольцевых зубчатых колеса будут иметь взаимно скрещивающиеся оси (то есть оси, которые не параллельны и не пересекаются друг с другом): одно из двух кольцевых зубчатых колес будет иметь ось, параллельную оси IV, а другое будет иметь ось, параллельную оси V. При указанной конфигурации надлежащее зацепление будет возможным посредством выполнения кольцевых зубчатых колес с зубьями соответствующей формы, подобными, например, зубьям зубчатого колеса с винтовыми зубьями, которое входит в зацепление с червяком.
Из вышеприведенного описания очевидно, что запястье робота в соответствии с изобретением обеспечивает возможность значительного упрощения конструкции при существенном сокращении числа соответствующих компонентов и, следовательно, при существенной экономии затрат в целом.
Другое преимущество обусловлено точностью перемещений вследствие простоты передач. То обстоятельство, что различные величины зазоров (люфта) не суммируются, обусловлено тем, что каждое приводное устройство размещается в опорном элементе, примыкающем к элементу, которым оно «управляет».
Само собой разумеется, без нарушения принципа изобретения детали конструкции и варианты осуществления могут варьироваться в широких пределах по отношению к тому, что описано и проиллюстрировано здесь исключительно в качестве примера, и при этом тем самым не будет иметь место отход от объема настоящего изобретения.
Реферат
Изобретение относится к манипуляторам, в частности к запястью руки шарнирного робота. Запястье (20) содержит первый опорный элемент (22), который смонтирован на элементе робота, выполненном с возможностью поворота вокруг оси (IV), второй опорный элемент (24), смонтированный на опорном элементе (22) с возможностью поворота вокруг оси (V), расположенной под углом относительно оси (IV), первый двигатель (28), опорой которому служит опорный элемент (22) и вал которого соединен при повороте с опорным элементом (24) посредством первой зубчатой передачи, третий опорный элемент (26), смонтированный на опорном элементе (24) с возможностью поворота вокруг третьей оси (VI), расположенной под углом относительно оси (V), и второй двигатель (30), опорой которому служит опорный элемент (24). Вал второго двигателя (30) соединен при повороте с третьим опорным элементом (26) через вторую зубчатую передачу. Обеспечивается упрощение конструкции и ее удешевление. 11 з.п. ф-лы, 6 ил.
Формула
Документы, цитированные в отчёте о поиске
Конструкция механической руки антропоморфного робота
Комментарии