Устройство для перемещения исполнительного органа - SU1224137A1
Код документа: SU1224137A1
Чертежи
Описание
Изобретение относится к манипуляторам и промышленным роботам и может быть использовано в машиностроении для автоматизации перемещения исполнительных органов устройств.
Целью изобретения является повышение надежности перемещения исполнительного органа за счет применения приводов в виде электродвигателей, в роторах которых раз- меш,ены щариковинтовые передачи.
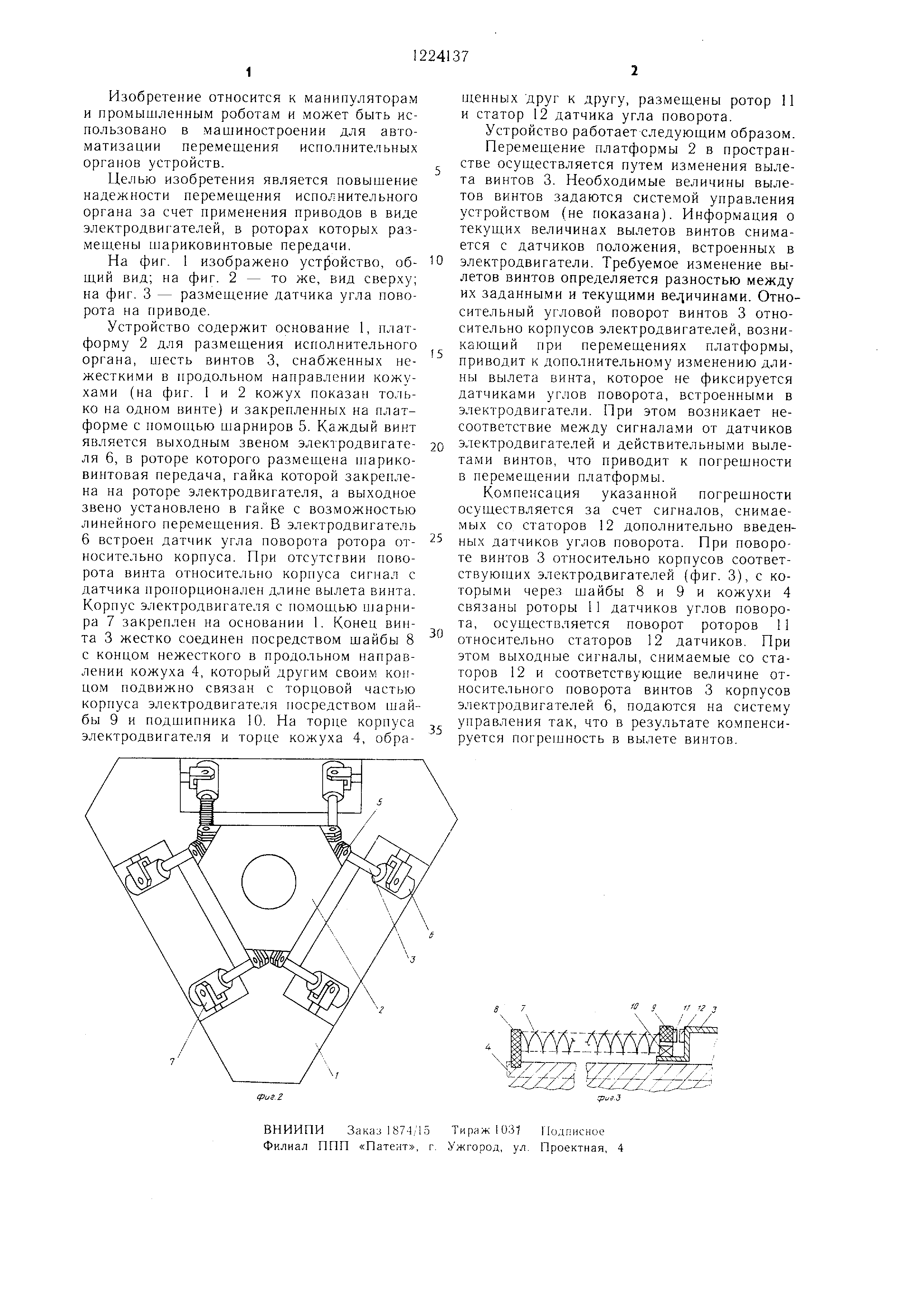
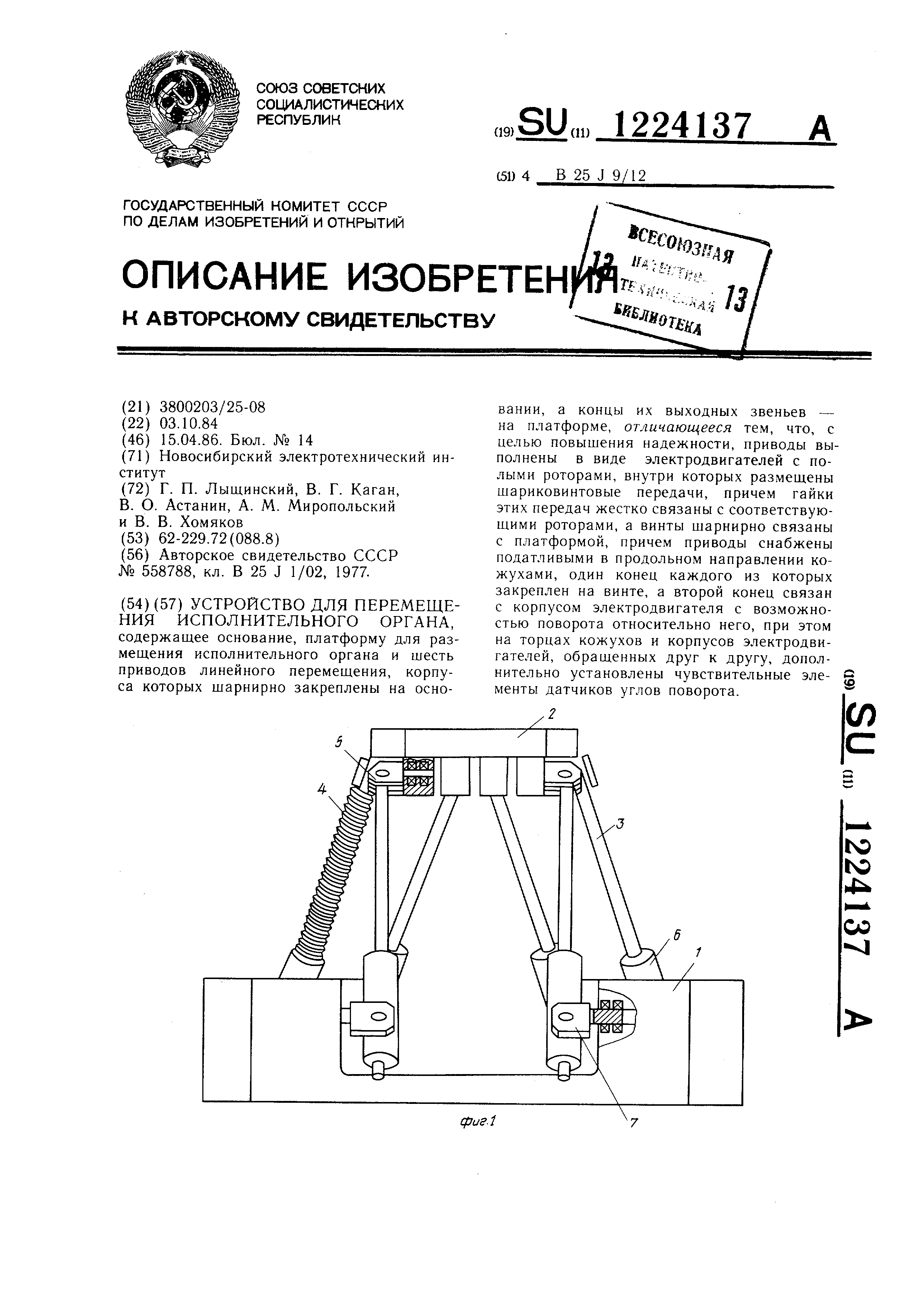
На фиг. 1 изображено устройство, об- ш,ий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - размещение датчика угла поворота на приводе.
Устройство содержит основание 1, платформу 2 для размещения исполнительного органа, шесть винтов 3, снабженных нежесткими в продольном направлении кожухами (на фиг. 1 и 2 кожух показан только на одном винте) и закрепленных на платформе с помощью щарниров 5. Каждый винт является выходным звеном электродвигателя 6, в роторе которого размещена пшрико- винтовая передача, гайка которой закреплена на роторе электродвигателя, а выходное звено установлено в гайке с возможностью линейного перемещения. В электродвигатель 6 встроен датчик угла поворота ротора от- носительно корпуса. При отсутствии поворота винта относительно корпуса сигнал с датчика пропорционален длине вылета винта. Корпус электродвигателя с помощью шарнира 7 закреплен на основании 1. Конец винта 3 жестко соединен посредством щайбы 8 с концом нежесткого в продольном направлении кожуха 4, который другим своим концом подвижно связан с торцовой частью корпуса электродвигате;1Я посредством шайбы 9 и подшипника 10. На торце корпуса электродвигателя и торце кожуха 4, обра
5
5
0
0
щенных друг к другу, размещены ротор 11 и статор 12 датчика угла поворота.
Устройство работает следующим образом.
Перемещение платформы 2 в пространстве осуществляется путем изменения вылета винтов 3. Необходимые величины вылетов винтов задаются систе.мой управления устройством (не показана). Информация о текущих величинах вылетов винтов снимается с датчиков положения, встроенных в электродвигатели. Требуемое изменение вылетов винтов определяется разностью между их заданными и текущими величинами. Относительный угловой поворот винтов 3 относительно корпусов электродвигателей, возникающий при перемещениях платформы, приводит к дополнительному изменению длины вылета винта, которое не фиксируется датчиками углов поворота, встроенными в электродвигатели. При этом возникает несоответствие между сигналами от датчиков электродвигателей и действительными вылетами винтов, что приводит к погрешности в перемещении платформы.
Ко.мпенсация указанной погрешности осуществляется за счет сигналов, снимаемых со статоров 12 дополнительно введенных датчиков углов поворота. При повороте винтов 3 относительно корпусов соответствующих электродвигателей (фиг. 3), с которыми через щайбы 8 и 9 и кожухи 4 связаны роторы 11 датчиков углов поворота , осуществляется поворот роторов 11 относительно статоров 12 датчиков. При этом выходные сигналы, снимаемые со статоров 12 и соответствующие величине относительного поворота винтов 3 корпусов электродвигателей 6, подаются на систему управления так, что в результате компенсируется погрешность в вылете винтов.
Фиг-Z
ia S г
ВНИИПИ Заказ 1874/15 Тираж 1031 Подписное Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
Реферат
Формула
Комментарии