Схват манипулятора - SU889423A1
Код документа: SU889423A1
Чертежи
Описание
(5) СХВЛТ МАНИПУЛЯТОРА
Реферат
Формула
Изобретение относится к машиностроению и может быть использовано
в промышленных работах и манипулято рах. Известен схват манипулятора, содержащий
губки, имеющие рабочие полости и снабженные подвижными стерж нями, торцы которых направлены к
изделию 1 J. Недостатком известного устройства является наличие сложных средств
подвода рабочей среды, а также слож ность выполнения стержней в виде
многогранников, что существенно усложняет конструкцию схвата и снижает надежность.
Цель изобретения - упрощение кон струкции и позышение надежности. Цель достигается тем, что губки
выполнены подвижными в направлении изделия, а их рабочие полости выпод нены в виде сообщающихся сосудов,
в соединяющую магистраль которых дополнительно введен нормально открытый
клапан. При этом стержни снабжены поршнями и подпружинены.
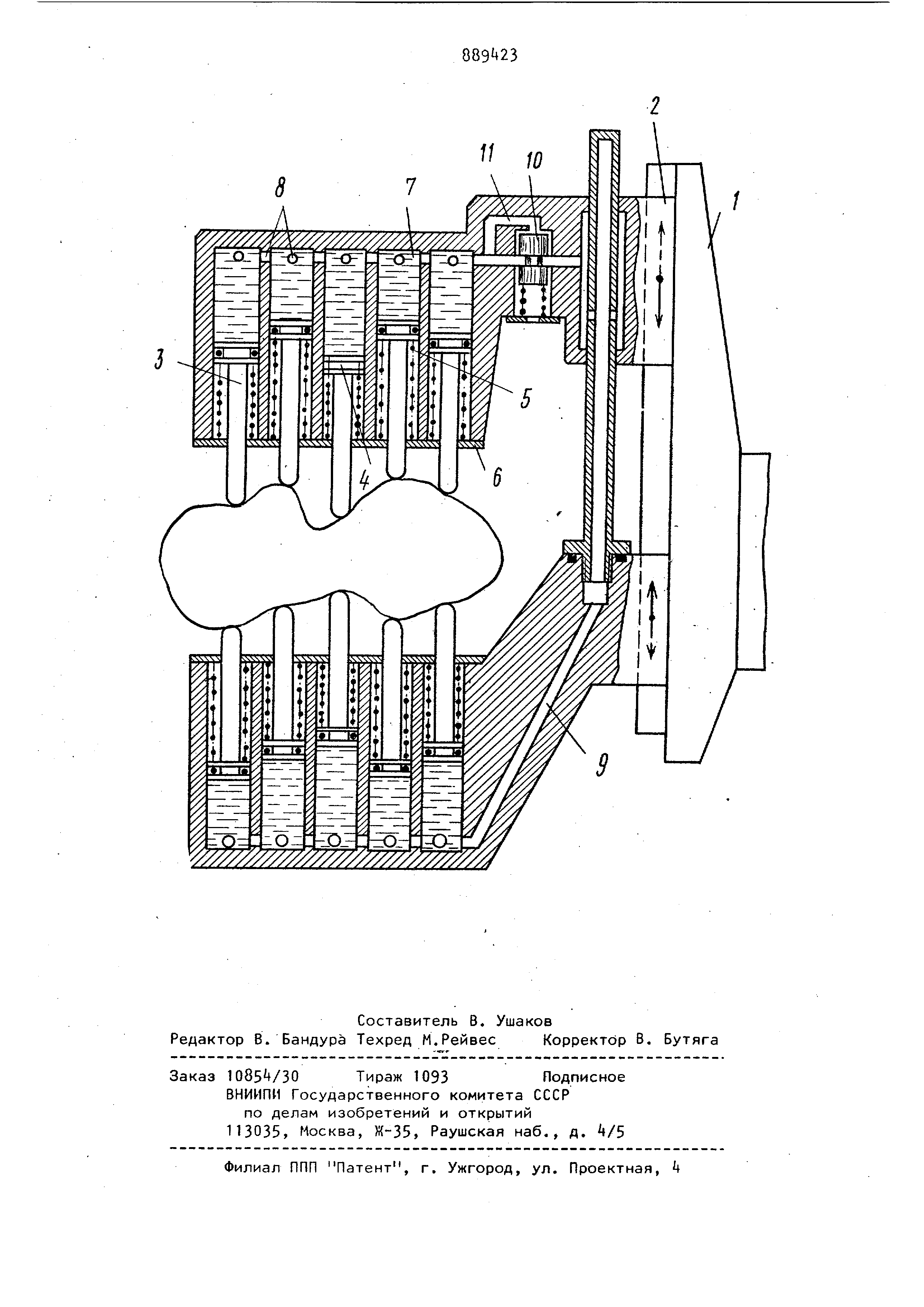
На чертеже изображен схват манипулятора , общий вид. Схват содержит корпус 1, в котором
установлены две поступательно перемещающиеся в направлении изделия губки 2. В цилиндрических глухих
отверстиях губок расположены ряды стержней 3 с поршнями , отжимаемые от центра схвата пружинами
5, установленными между поршнями и закрепленной на губке пластиной
6. Заштоковые полости 7 цилиндрических отверстий каждой из губок заполнены рабочей средой и соединены
каналами 8. Рабочие полости обеих губок связаны между собой магистралью
9, т.е. образуют систему сообщающихся сосудов, причем в соединяющей
их магистрали установлен нормально открытый клапан 10, имеющий
канал И управления. Канал 11 связан с рабочей полостью 7 губки 2.
Устройство работает следующим образом .
В исходном положении при разведенных
губках 2 все стержни 3 под Действием пружин 5 сдвинуты на некоторое одинаковое расстояние от центра
схвата. При сближении губок 2 один или несколько стержней 3 вхо- дят в соприкосновение с деталью и
перемещаются от центра схвата, вы-, тесняя поршнями k рабочую жидкость через каналы О и перераспределяя ее
через магистраль 9 между рабочими полостями губок, при отом все остальные стержни смещаются к центру схват
Процесс захвата заканчивается в момент контакта всех стержней 3 с деталью
. При дальнейшем сЬлижении губок 2 и увеличении усилия захвата возросшее в рабочих полостях губок
давление подается по каналу 11 управления к торцу клапана 10, который
перекрывает магистраль 9, в результате чего деталь оказывается надежно зажатой стержнями 3
При разведении губок 2 давление в рабочих полостях губок падает, понижается
давление в канале 11управления , клапан 10 открывает магистраль 9 и стержни 3 под действием пружин
5 занимают исходное положение.
перераспределяя рабочую жидкость по
каналам 8 и магистрали 9 между рабочими полостями 7 губок.
Применение предлагаемого схвата манипулятора позволяет повысить надежность
захвата детали за счет независимости действия каждого стержня и упростит его конструкцию за счет
ликвидации источника давления.
Формула изобретения
1.Схват манипулятора, содержащий губки, имеющие рабочие полости и снабженные подвижными стержнями, торцы
которых направлены к изделию, о тличающийся тем, что, с целью упрощения конструкции и повышения
надежности, губки выполнены подвижными в направлении изделия, а их рабочие полости выполнены в виде
сообщающихся сосудов, в соединяющую магистраль которых дополнительно введен
нормально открытый клапан.
2.Схват по п. 1, о т л и ч а ющ
и и с я тем, что стержни снабжены поршнями и подпружинены.
Источники информации, принятые во внимание при экспертизе
1 . Авторское свидетельс тво СССР № , кл. В 25 J 15/00, 1976.
Комментарии