Схват манипулятора - SU770787A1
Код документа: SU770787A1
Чертежи

Описание
Изобретение относится к области машиностроения, а именно к схватам манипуляторов для выполнения подъемнотранспортных и основных технологических операций с грузами различной формы.
Известен схват манипулятора, содержащий корпус, губки и стержни, воспринимающие торцовыми поверхностями усилие со стороны рабочего тела и имеющие независимое перемещение 1 .
Недостатком известного захватного устройства является то, что при схватывании изделий сложной формы оно не обеспечивает их надежйой фиксации .
Целью изобретения является повышение надежности работы захвата путем создания одинаковых прижимных усилий всеми рабочими стержнями.
Для этого схват снабжен расположенными через один между рабочими стержнями неподвижными дополнительными стержнями и гибким нерастяжимым элементом, например лентой, концы которой прикреплены к губке, причем концы рабочих и дополнительных
стержней контактируют с этим гибким нерастяжимым элементом.
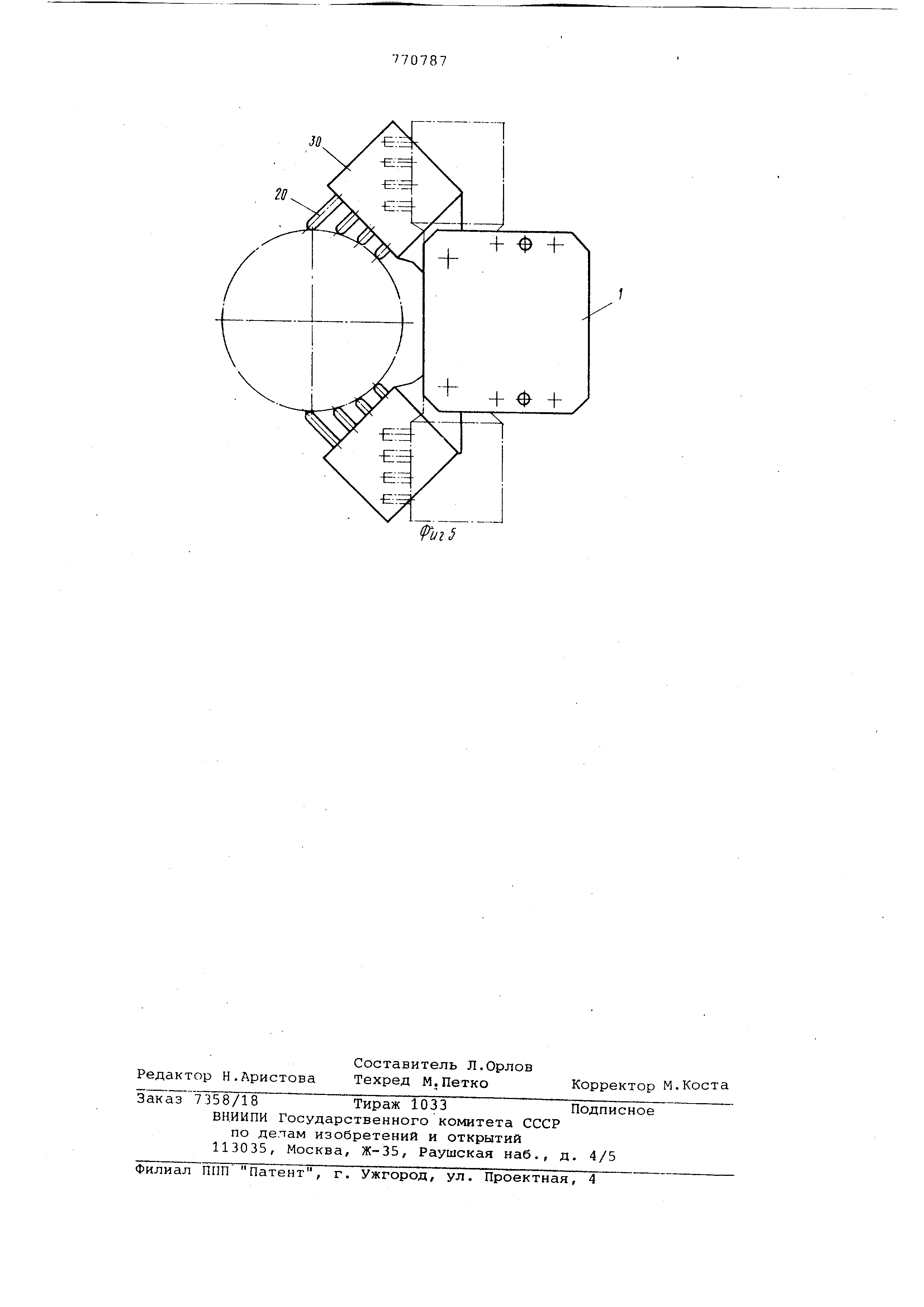
На фиг. 1 изображен общий вид схвата со снятой.крышкой верхней губки; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 1; на фиг. 4 - сечение В-В на фиг. 1; на фиг. 5 - схема захвата круглого предмета.
Схват имеет корпус, образованный двумя одинаковыми пластинами 1 и . прокладками 2. Пластины стянуты винтгиии 3. В корпусе на оси 4 с использованием шайб 5 и шплинтов 6 шарнирно установлен силовой цилиндр 7. С цилиндром 7 жестко связана траверса 8, передающая усилия на тягу 9 с использованием осей 10, шайб 11 и шплинтов 12. Тяги 9, в свою очередь, с помощью осей 13, шайб 14 и шплинтов 15 шарнирно связаны с губками 16 (опорой служат оси 17, зафиксированные шайбами 18 и шплинтами 19), обеспечивая их поворот.
В рабочей части губок 16, выполненной (фиг. 1) в форме рамки, размещены детали захватывающего устройства . В торцовых поверхностях губок 16, обращенных к рабочей зоне, выполней ряд отверстиЛ, где расположены рабочие стержни 20, выступающие над торцовой поверхностью губок 16. /Эти стержни подпружинены пружина .ми 21, для улучшения работы которых предусмотрены направляющие 22 и сухари 23. Выступающие из губки концы стержней 20 взаимодействуют с грузом .
Со стороны губки 16, противоположной рабочей зоне, в крышке 24 установлены дополнительные стержни 25, неподвижные относительно губки 16 и расположенные между рабочими стержнями 20.
На обращенных друг к Другу концах рабочих стержней 20 и дополнительных стержней 25 выполнены округленные гладкие поверхности (см. фиг. 1), взаимодействующие с нерастяжимым гибким элементом (например, лентой) 26, которая, поочередно касаясь рабочих стержней 20 и дополнительных стержней 25, закреплена на губке 16 планкгичи 27 и винтами 28. Крышка 24 прикреплена к губке 16 винтами 29. Детали механизма защищены от повреждений пластинами 30 прикрепленными к губкам 16 винтами 31 .
Схват работает следующим образом
В положении, когда губки разведены (см. фиг. 5, штрихпунктирные ли .нии), схват подводится к предмету, затем производится поворот губок 16 силовым цилиндром 7. При этом рабоч стержни 20 вступают в контакт с преметом . Ввиду того, что .стержни 20 подпружинены пружинами 21 и взаимодействуют с нерастяжимой гибкой лентой 26, суммарная величина пути, пройденного рабочими стержнями 20 одной губки 16 от нейтрального положения в сторону захватываемого предмета , равна суммарной величине пути, . пройденного рабочими стержнями в сторону , противоположную предмету. При взаимном смещении рабочих стержней 20 лента 26 скользит по выпуклым поверхностям стержней 20 и 25. С jj. целью уменьшения трения возможно менение направляющих роликов.
Формула изобретения
Схват манипулятора, содержащий 15 корпус, привод перемещения губок, губки с выполненным в каждой из них по меньшей мере одним рядом отверстий , в которых с возможностью перемещения смонтированы подпружиненные 20 рабочие стержни, взаимодействующие с грузом, отличающийс.я тем, что, с целью повышения надежности работы захвата путем создания одинаковых прижимных усилий всеми рабочими стержнями, он снабжен
расположенными через один между рабочими стержнями неподвижными дополнитeльны iи стержнями и гибким нерастяжимьлм элементом, концы которого прикреплены к губке, причем концы
ЗУ рабочих и дополнительных стержней контактируют с гиЪким нерастяжимым элементом.
Источники информации, принятые во внимание при экспертизе
35 1. Авторское свидетельство СССР № 626947, кл. В 25 J 15/00, 01.06.76.
Реферат
Формула
Комментарии