Манипулятор - SU1292661A3
Код документа: SU1292661A3
Чертежи

Описание
12
пальца 10 и 11 для захвата обрабаты- цаемой детали перемещаются в направлении , параллельном линейным, участкам , посредством направляющих зле- ментов, причем один из пальцев соединен с одним из линейных участков цепи, а другой палец - с другим линейным участком цепи. Имеется пневматический силовой цилиндр 5 внутри которого располагается поршень 23, стационарно установленный на штоке 24, причем корпус силового пилиндра имеет возможность свободно скользить вдоль штока 24. Шток 24 герметически проходит через обе боковые стенки
1
Изобретение касается м;;шипулято - ра для обрабатываемой детали, который может быть прикреплен к руке робота , в частности такого маншгулято- ра для обрабатываемой детали, кото- рьй имеет два пальца и который сконструирован таким обра.зом, что точка;, по направлению к которой приближаются пальцы руки робота для захвата обрабатываемой детали, всегда занимает одно и то же фиксированное положение , находящееся точно посередине между пальцами.
Цель изобретения - повьшение надежности и упрощение конструкгщи манипул ято р а.
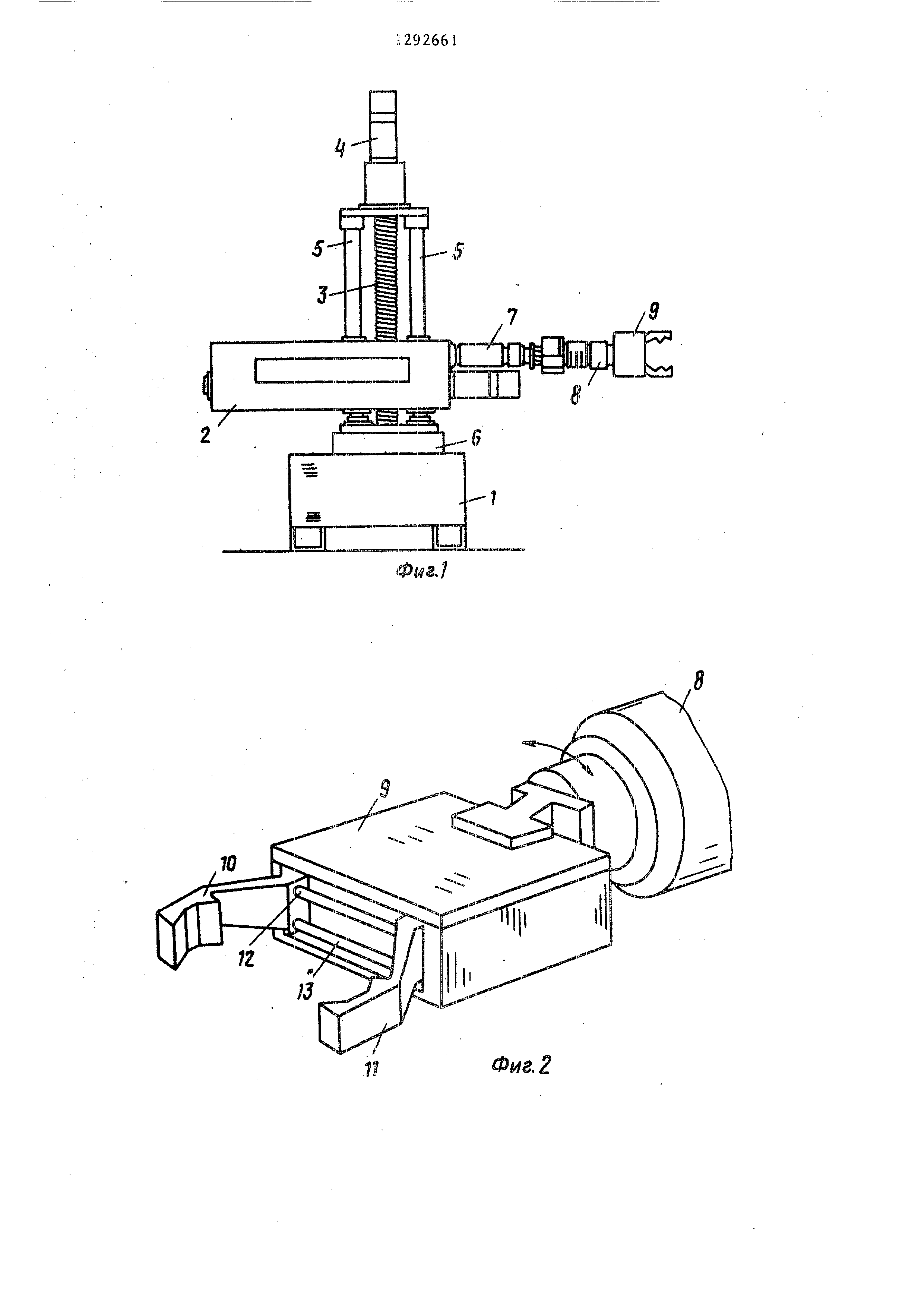
На фиг.1 изображена конструкция промьшшенного робота, в котором установлен манипулятор для обрабатываемой детали, вид спереди; на фиг.2 - манипулятор для обрабатываемой детали; на фиг. 3 внутренний механизм манипулятора для обрабатываемой детали; на фиг.4 - то жеj вид сверху; на фиг. 5 - схема управления манипулятора,
Робот (фиг.1), имеющий манипулятор для обрабатываемой детали, содержит основание 1, корпус 2 робота винтовой стержень 3;, перемещающий корпус робота в вертикальном направлении , двигатель 4 для вращения винтового стержня 3, направляющие стержни 5 для направления корпуса 2 робота по мере его перемещения посредством винтового стерж;н:я в &ертикгшызом
и 1линдра. Корпус силового цилиндра соединен с опорной плитой 22 пальца 1 посредством соединительного элемента 26. Поступле -ше рабочей среды, например сжатого воздуха, в цилиндр с одной его стороны и отвод ее из Щ 1пиндра с другой его стороны приводит к перемещению корпуса цилиндра вдоль штока 24j вследствие чего происходит перемещение цепи вызывающее сближение пальцев 10 и 11 или удаление их друг от друга,, что обеспечивает . захватьшание или высво - бождение обрабатьюаемой детали. 5 ил,
5
0
5
0
5
направлении, поворотную подставку 6 д:ая вращения корпуса 2 робота, рычаг 7, который может удлиняться или сокращаться в продольном направлении, механизм 8 запястья и рабочий орган - манипулятор 9 для обрабатываемой детали , .-который поворачивается посредством механизма 8 запястья.
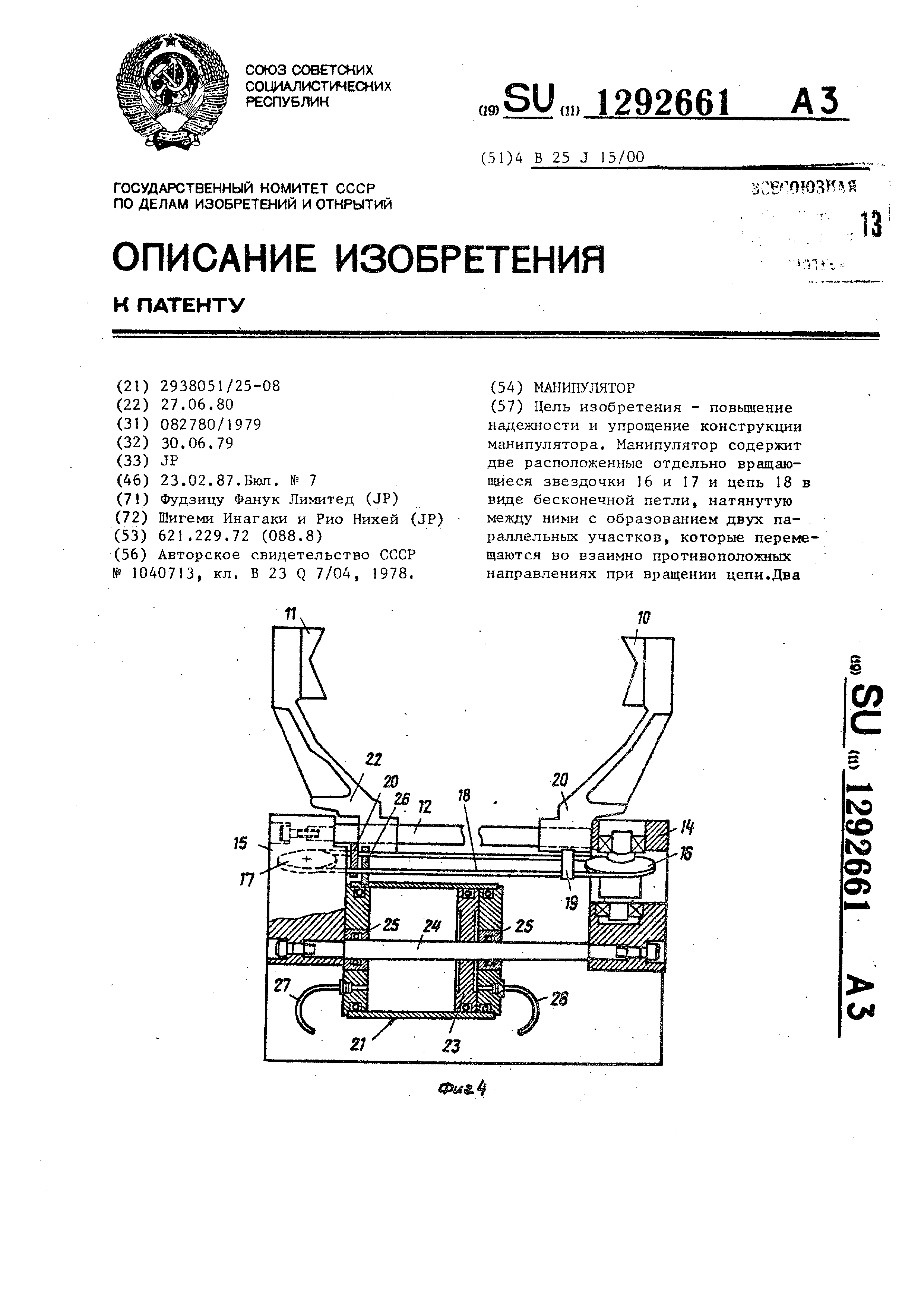
Манипулятор (фиг.2) имеет два пальца 10 и 11j которые направляются посредством направляющих стержней 12 и 13 при сближении друг с другом или удалении друг от друга соответственно при захв 1тьшании или высвобождении обрабатьшаемой детали. Концы направляю1Щ 1х стержней 12 и 13 (фиг,3 и 4) неподвижно прикреплены к блокам 14 и 15, Позади направляю- П(их стержней 12 и 13 у их концов расположены звездочки 16 и 17j оси которых удерживаются блоками 14 и S5, Между звездочками 16 и 17 натянута бесконечная цепь 18, включающая два параллельных участка.
Соединительный элемент 19 неподвижно прик} егшен у одного конца цепи t8 на ее линейном участке, расположенном над ззездочкаш р а другим своим концом - к опорной плите 20, связанной с пальцем Ш, Другой соединительный элемент 21 одним своим концом неподвижно соединен с вторым линейньм участком цепи 18, расположенным ниже звездочекf а другим концом - к опорной плите 22, связанной с пальцем 11,
3 1
Позади звездочек 16 и 17 расположен механизм для приведения в действие пальцев 10 и 11, выполненный в виде пневматического силового цилиндра . Внутри силового цилиндра размещен поршень 23, закрепленный на двустороннем штоке 24, проходящем с герметичным уплотнением 25 через обе боковые стенки силового цилиндра (фиг.А). При этом концы штока 24 неподвижно прикреплены к блокам 14 и 15. Таким образом поршень 23 для предотвращения его перемещения неподвижно закреплен на стационарно установленном штоке 24, а корпус силового цилиндра имеет возможность свободно скользить вдоль штока 24 и соединен с опорной плитой 22 пальца 1 посредством соединительного элемента 26. Во внутреннюю полость силового цилиндра подведены соответственно гибкие шланги 27 и 28 для подачи в него воздуха.
Манипулятор работает следующим образом.
Когда пальцы 10 и 11 (фиг.З и 4) отдалены друг от друга, силовой цилиндр располагается с левой стороны и его корпус упирается в блок 15. При подаче воздуха в цилиндр из шланга 28 на правую сторону поршня 23 начинается перемещение корпуса силового цилиндра в правую сторону (фиг.4). Поскольку цепь 18 соединена с цилиндром посредством соединительного элемента 26, то она также начинает перемещаться. Пальцы 10 и 11, которые соединены с соответствующими параллельными участками (ветвями) цепи 18, также начинают перемещаться внутрь, а именно в направлении друг
к другу, и соединятся в точке, расположенной строго посредине расстояния между ними, когда цилиндр переместится вправо до упора (фиг.4) в блок 14.
Для удаления пальцев друг от друга указанная операция повторяется в обратной последовательности. При этом подача воздуха в цилиндр осуществляется по гибкому шлангу 27 при выпуске его через шланг 28. Цилиндр возвращается в исходное положение (фиг.4), что приводит к удалению пальцев 10 и 11 друг от друга в реO
5
0
5
зультате их движения соответственно влево и вправо.
Схема управления работой манипулятора (фиг.З) содержит соленоидный ютапан 29, вызывающий захватывание обрабатываемой детали, соленоидный клапан 30, вызывающий высвобождение обрабатываемой детали, и соленоидный клапан 31 рдя управления вьшуском . Клапаны 29 и 30 являются трехходовыми клапанами.
Возможно также использовать кон- струк Цию манипулятора, в которой между шкивами натянута стальная проволока или распределительный ремень.Манипулятор может найти применение не только Б промышленных роботах, но также и в других устройствах, например в аппаратуре дистанционного управления при обращении с биологически опасными материалами..
Формула изобретения
Манипулятор, содержащий рабочий орган (захват), вьшолненный в виде первого и второго пальцев, перемещающихся по направляющим, смонтированным в корпусе, от привода, имеющего двигатель кинематически связанный с гибкой передачей, содержащей звездочки и бесконечную цепь с двумя параллельньв ш участками (вет- )s с которы ш посредством соединительных элементов жестко связаны соответственно первьй и второй пальцы , при этом манипулятор имеет систему управленияJ отличающийся теМз что, с целью повы
шения надежности и упрощения конструкции , в манипуляторе двигатель выполнен в виде пневматического силового цилиндра, имекядего внутри поршень, жестко закрепленный на штоке , проходящем с герметичным уплотнением через обе боковые стенки цилиндра и жестко соединенном с корпусом манипулятора, а корпус пневматического силового цилиндра через соединительный элемент связан с цепью, при этом манипулятор снабжен устройством для открытия и закрытия соленоидных клапанзв системы управления пневмоцшп-шдром.
/
IU
Реферат
Цель изобретения - повышение надежности и упрощение конструкции манипулятора. Манипулятор содержит две расположенные отдельно вращающиеся звездочки 16 и 17 и цепь 18 в виде бесконечной петли, натянутую между ними с образованием двух параллельных участков, которые перемещаются во взаимно противоположных направлениях при вращении цепи.Два g СУ) - ё ГО О) о ы
Формула
Комментарии