Захват манипулятора - SU488696A1
Код документа: SU488696A1
Чертежи



Описание
1
Изобретение относится к промышленным манипуляторам, которые могут быть применены для механизации тяжелых вспо1иогательных работ в подземных условиях, а также в машиностроения, строительстве и лругю5| отраслях техники.
Известны захваты манипуляторов, выполненные из шарнирно сочлененных с ладонью пальцев, разделенных на .фаланги и снабженных приводом.
Известные захваты имеют сложную конструкцию из-за громоздких приводов и малую область манипулирования, так как фаланги не имеют индивидуальных приводов .
Цель изобретения - утфостить конструкцию и увеличить область манипулнро:вания ...:..
В предлагаемом захвате манипулятора фаланговые суставы каждого пальца выполнены в виде неполноповоротных гидродвигателей .
На фиг. 1 изображен захват манипулятора , общий вид; на фиг. 2 - то же, вид сбоку; на фиг. 3 - разрез А-А на фиг. 1;
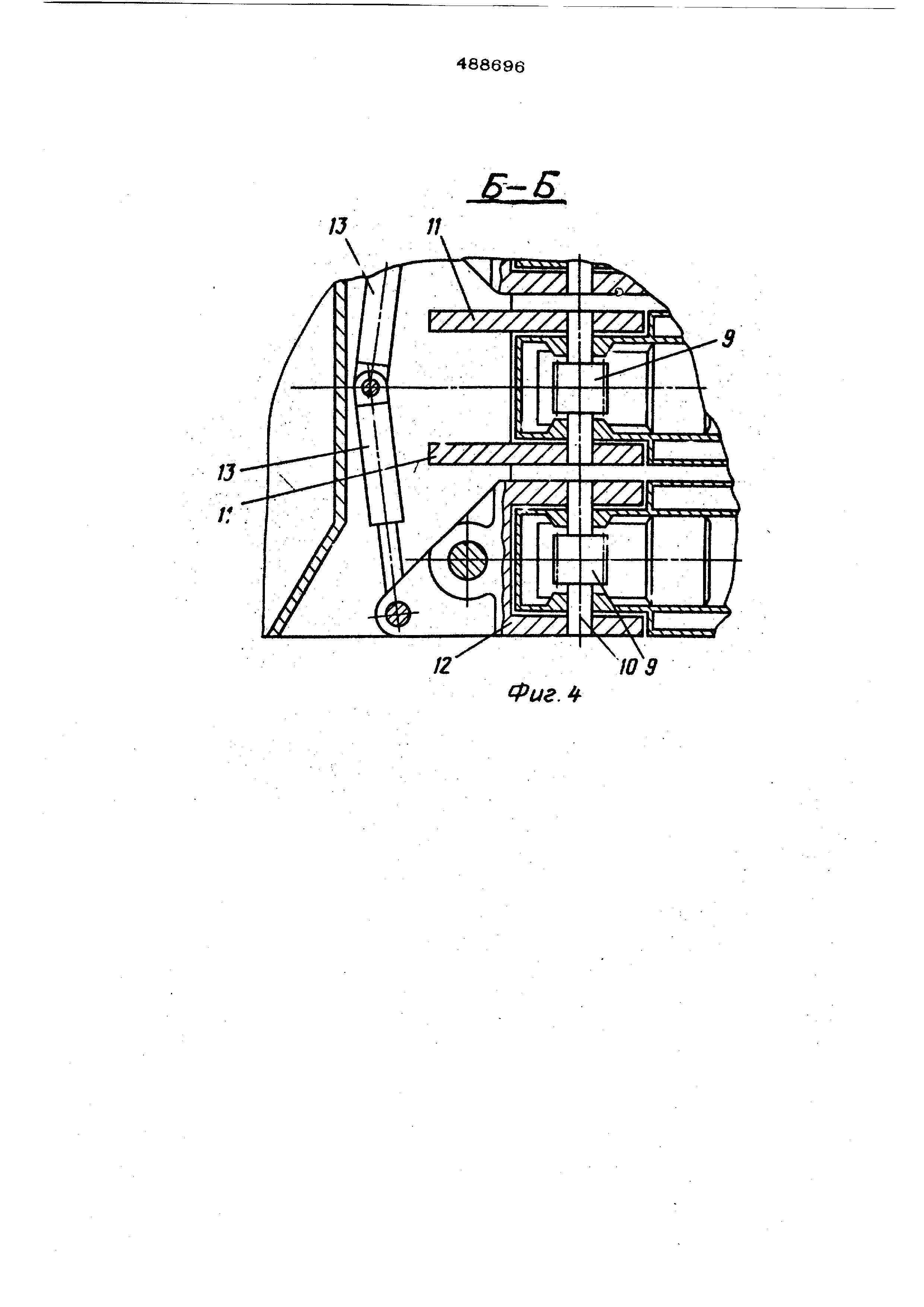
нб фиг. 4 - разрез Б-Б на фиг. 2;нафиг.5разрез В-В на фиг. 1.
Захват манипулятора вьтолнен из ишр;ннрно сочлененных с ладонью 1 пальцев, разделенных на фаланги 2, 3 и 4.
I Фаланга 2 является рабочей. Сустав, образованный фалангами 2 и 3, выполнен в виде неполноповоротного гидродвигателя и состоит из Z -образного поршня 5 с
нарезанными на нем двумя зубчатыми рейками и двух шестерен 6, входящих в зацепление с этими рейками.
Концы выходных валов 7 этих шестерен неподвижно крепятся; один - в начале фалангш 2, второй - на конце фаланги-1. Сустав, образованный фалангой 4 в месте сзе крепления к ладони 1, выполнен также в виде неполноповоротного гидродвигателя, который состоит из Г-образного поршня 8 с
одной зубчатой рейкой и шестерни 9, зацепляющейся с этой рейкой. Концы выходно го вала 10 этой шестерни закреплены неiподвижно: у среднего пальца - в проуши:нах 11 ладони 1, у большого и двух боковых пальцев - в поворотных крон11 тсй
rfax 12. К поворотным кронштейнам Ik. крепятся штоки трех гидроцилиндров 13, два из которых расположены в передней части ладони 1, а третий - в задней ее части под опорой большого пальца, которая представляет собой две щеки 14,приваренные к задней нижней части ладони 1 так, что ось -врйщения большого пальца на раллельна продольной оси захвата и находится несколько выше ее, В опоре закреплен поворотный кронштейн 12 большого пальца на оси 15. Захват сочленен со стелой 16 (см.фиг. 1) манипулятора силовым универсальным шарниром, состоящим из вертикального 17 и горизонтального 18 гидроприводов . Вертикальный привод 17 включает в себя два Г-образных поршня 1 9 (см. фиг. F) с зубчатыми рейками и шестерню 2О, входящую с ними в зацепление. Шестерня неподвижно закреплена на валу 21/выходные концы которого установлены в проушинах 22 ладони 1. Горизонтальный привод 18 также состоит из двуз4 Г-образных поршней 23 с зубчатыми рейками и шестер ни 24, посаженной на вал 25. Корпус привода 18 выполнен в виде вилки, в верхней и нижней части которой смонтированы два блока шестерен 26. Корпус привода 17 закреплен на валу 27 привода 18.
Работа происходит следующим образом. При подаче рабочей жидкости в поршневые полости приводов 17 и 18 силового шарнира ггоршни перемешаются навстречу друг 1 п W л
другу и шестерни, находящиеся с ними в зацеплении, начинают враш&гься. Вращение шестерни 20 передается валу 21, который поворачивает ладонь 1 вокруг горизонтальной оси. Вращение шестерни 24 через вал 25 передается обоим блокам шестерен 26, которые через вал ;.d7 поворачивают корпус вертикального привода 17, а вместе с ним и ладонь 1 вокруг вертикальной оси.Два
i идроцилиндра 13 позволяют разводить боковые пальцы, а третий врашает большой палец вокруг оси 15, противопоставляя его трем остальным. При подаче рабочей жидкости в полости гидроцилиндров, образующих фаланговый сустав, поршни перемешаются и при этом вращаются шестерни 6, Врашение валов шестерен 6 передается фаланговым шарнирам, в результате чего фаланги 2 и 3 сгибаются одновременно и на
равные углы относительно фаланги 4, а фаланга 4 под действием поршня 8, обкатывающегося вокруг шестерни 9, сгибается относительно ладони, а вместе с ней сгибается и весь палец.
Формула изобретения
Захват манипулятора, выполненный из шарнирно сочлененных с ладонью пальцев,
разделенных на фаланги и снабженных при- „
водом, отличающийся тем, что,
с целью упрощения конструкции и увеличения области манипулирования, фаланговые .суставы каждого пальца выполнены в виде неполноповоротных гидродвигателей.
Фиг. 1 г ч
«М
fsi
13
Б-Б 26 Фиг.5

Реферат
Формула
Комментарии