Терапевтический тренажер для ходьбы - RU2743018C1
Код документа: RU2743018C1
Чертежи





Описание
Изобретение касается терапевтического тренажера для ходьбы. При этом такого рода тренажеры для ходьбы должны оказывать поддержку в повторном обучении естественной ходьбе для пациентов, которые оперировались на тазобедренном суставе или которые перенесли апоплексический удар (инсульт).
Естественный шаговый цикл состоит из фазы опоры ноги и фаза маха ноги. Шаговый цикл начинается и заканчивается постановкой пятки на пол. Фаза опоры ноги включает в себя три частичные фазы: фазу постановки или опускания, фазу опоры и фазу отталкивания. Фаза маха ноги делится на начальную фазу маха, в которой нога отрывается от пола и голень делает мах назад вверх до примерно 60° - 80° согнутого положения в коленном суставе. При следующей средней фазе маха нога в согнутом положении переносится вперед при сгибании колена от 60° до 80°. В заключительной фазе маха нога теперь вновь опускается в направлении пола, соответственно, в направлении поверхности для ходьбы, причем сначала вновь осуществляется постановка пятки.
Пациенты после апоплексического удара в большинстве случаев в состоянии инициировать фазу опоры ноги. Однако, часто собственной активности (еще) не достаточно, чтобы осуществить все частичные фазы маха ноги.
Таким образом, задачей настоящего изобретения является предоставление в распоряжение пользователя терапевтического тренажера для ходьбы, который поддерживает его при (повторном) обучении естественному шаговому циклу.
Эта задача решается терапевтическим тренажером для ходьбы с признаками пункта 1 формулы изобретения.
Для этого, в частности, приемная часть для стопы для приема по меньшей мере одной частичной области переднего отдела стопы пользователя или для образования соединения с носком обуви, с по меньшей мере переставляемым в и/или против перестановочного направления (4) базовым держателем (3), и с активно и/или пассивно приводимым перестановочным блоком (30) для относительной, ориентируемой по существу перпендикулярно перестановочному направлению (4) перестановки приемной части (1) для стопы относительно упомянутого по меньшей мере одного базового держателя (3).
С этим связано то преимущество, что предоставлена поддержка пользователям, которые имеют сложности с тем, чтобы в фазе маха перемещать согнутую в колене ногу вперед. В этой фазе терапевтический тренажер для ходьбы поддерживающим образом содействует тому, чтобы он переставлялся, соответственно, перемещался в и/или против перестановочного направления.
Чтобы позволить ноге пользователя во время фазы опоры ноги естественное перекатывание, оказалось целесообразным, если в или на базовом держателе образовано свободное пространство, и если это свободное пространство сформировано таким образом, что на опорную поверхность или поверхность для ходьбы может наступать по меньшей мере часть ноги пользователя. Эта опорная поверхность или поверхность для ходьбы может быть в мобильном варианте, например, пол (настил), или в стационарном варианте также (бесконечная) лента транспортера (движущаяся дорожка). Тем самым, следовательно, терапевтический тренажер для ходьбы также является стационарно приводимым, причем в таком случае базовый держатель сам по себе не требуется перемещать через пространство (помещение), а поступательное движение тренажера для ходьбы осуществляется относительно поверхности транспортера.
Согласно одному предпочтительному варианту осуществления стационарной версии терапевтического тренажера для ходьбы базовый держатель имеет наступательную поверхность, которая рассчитана таким образом, чтобы на нее наступала нога пользователя или обувь. Эта наступательная поверхность по своим размерам выбрана так, что нога человека, предпочтительно плоскостно, могла стоять на ней без выступания за опорную поверхность базового держателя.
Согласно одному варианту осуществления настоящего изобретения является преимуществом, если с базовым держателем согласовано приводное устройство для моторизованной перестановки или перемещения базового держателя в и/или против перестановочного направления. Таким образом, следовательно, посредством мотора поддерживается движение вперед пользователя, в частности, совершающей маховое движение ноги. Этот мотор предпочтительным образом выполнен в виде электромотора, который питается от аккумулятора или иного источника энергии.
Альтернативно или дополнительно предусмотрен тяговый элемент или нажимной элемент. В качестве тягового элемента подходит трос, плетеный шнур (корд), цепь или тому подобное. В качестве нажимного элемента принимается во внимание, предпочтительно жесткий, толкающий стрежень. Указанный тяговый элемент или нажимной элемент могут во время тренировки манипулироваться терапевтом, причем посредством тягового элемента или посредством нажимного элемента поддерживается фаза маха ноги пользователя, соответственно, пациента. А именно, чтобы позиционированная в тренажере для ходьбы нога осуществляла сквозной мах в фазе маха ноги, терапевт тянет, соответственно, толкает тренажер для ходьбы с помощью тягового элемента в перестановочном направлении вперед до тех пор, пока пятка пациента вновь не будет поставлена на поверхность для ходьбы.
В одном предпочтительном выполнении тяговый элемент или нажимной элемент соединен или выполнен с возможностью соединения с базовым держателем, вследствие чего базовый держатель выполнен с возможностью сдвигания, тяги или толкания в и/или против перестановочного направления. Это гарантирует то, что тяговый элемент оказывает воздействие на или ниже центра тяжести терапевтического тренажера для ходьбы, чтобы избежать опрокидывания.
В одном другом предпочтительном выполнении терапевтического тренажера для ходьбы тяговый элемент или нажимной элемент соединен или выполнен с возможностью соединения с опорным держателем так, что базовый держатель путем приведения в действие опорного держателя посредством тягового элемента или посредством нажимного элемента может сдвигаться, тянуться или толкаться в и/или против перестановочного направления.
У некоторых пациентов после апоплексического удара встречается то, что они не могут двигать свои передние мышцы голени или мышцы разгибатели стопы, что при определенных обстоятельствах приводит к так называемому степпажу (перонеальная походка). Поэтому, чтобы поддержать пациента при подъеме ноги, оказалось предпочтительным, если перестановочный блок включает в себя соединенный, с одной стороны, с базовым держателем и, с другой стороны, с возможностью поворота или без возможности поворота с приемной частью для стопы опорный держатель. При этом, с приемной частью для стопы и/или опорным держателем согласован исполнительный элемент, посредством которого приемная часть для стопы и/или опорный держатель является переставляемым относительно базового держателя между приподнятым положением и опущенным положением. При этом, перестановка может осуществляться ступенчато или непрерывно (бесступенчато). Однако, для плавного подъема и опускания переднего отдела стопы является предпочтительной непрерывная (бесступенчатая) перестановка. Если приемная часть для стопы соединена с опорным держателем с возможностью поворота, то приемная часть для стопы может принимать носок стопы, так что наклон стопы является реализуемым посредством упругости носка стопы. Даже если представлено предпочтительно разъемное соединение носка обуви с приемной частью для стопы, носок обуви - как в случае крепления беговых лыж - может упруго деформироваться. За счет этого упругого носка стопы может достигаться наклон или поворот подошвы стопы относительно опорного держателя. При выполненном без возможности поворота соединении приемной части для стопы с опорным держателем эти обе конструктивные части также могут быть образованы за одно целое в качестве опорного держателя для стопы.
Исполнительный элемент может быть дополнительно снабжен исполнительным приводом для моторизованной перестановки приемной части для стопы и/или опорного держателя. В этом варианте осуществления тогда предпочтительным образом реализован образованный электромотором исполнительный привод, который может переставлять опорный держатель и/или приемную часть для стопы между приподнятым положением и опущенным положением. Другими словами, исполнительный элемент выполняет функцию мышцы разгибателя стопы. В случае здоровых людей эту задачу берет на себя передняя большеберцовая мышца.
В этой связи оказалось целесообразным, если тяговый элемент или нажимной элемент соединен или может соединяться с исполнительным элементом, что путем приведения в действие исполнительного элемента посредством тягового элемента или посредством нажимного элемента приемная часть для стопы и/или опорный держатель могут переставляться между приподнятым положением и опущенным положением, и что базовый держатель путем приведения в действие исполнительного элемента посредством тягового элемента или посредством нажимного элемента может сдвигаться, тянуться или толкаться в и/или против перестановочного направления. Таким образом, исполнительный элемент может одновременно выполнять две разные задачи, а именно, с одной стороны, ту же задачу, что и мышца разгибателя стопы, в частности, переднего отдела стопы, и, с другой стороны, движение вперед всего терапевтического тренажера для ходьбы во время фазы маха ноги.
Простая механическая структура может достигаться за счет того, что исполнительный элемент шарнирно соединен с базовым держателем, и что с исполнительным элементом согласован управляющий орган, который взаимодействует с управляющим кулачком, предусмотренным на приемной части для стопы и/или на опорном держателе. При этом, приемная часть для стопы и/или опорный держатель за счет перестановки управляющего органа относительно управляющего кулачка могут переставляться между приподнятым и опущенным положением.
В одном предпочтительном варианте осуществления исполнительный элемент образован в виде поворотно установленного на базовом держателе качающегося рычага, за счет поворота которого приемная часть для стопы и/или опорный держатель может переставляться между приподнятым положением и опущенным положением. С этим связано то преимущество, что тяговый элемент или нажимной элемент может воздействовать на качающийся рычаг усилием, посредством которого может воспроизводиться естественное подъемное движение стопы.
Предпочтительным оказалось, что с опорным держателем и/или приемной частью для стопы согласован один или более измерительных сенсоров. Этот измерительный сенсор образован, например, в виде сенсора наклона. Если сенсор наклона согласован с опорным держателем, то наклон опорного держателя относительно расположенного на поверхности для ходьбы базового держателя может регистрироваться и посредством управляющего компьютера документироваться. Дополнительно или альтернативно, сенсор наклона может быть размещен на приемной части для стопы, так что ее наклон относительно опорного держателя может измеряться и посредством управляющего компьютера документироваться. В обоих случаях индикаторное устройство может поставлять пользователю обратную информацию о зарегистрированных измерительным сенсором величинах (обратная биосвязь).
Далее, оказалось предпочтительным, если измерительный сенсор выполнен в виде торсионного сенсора, который регистрирует скручивание опорного держателя и/или приемной части для стопы. За счет этого может регистрироваться, идет ли пользователь удерживая колею; то есть осуществляет ли он прямолинейную ходьбу.
Далее, является целесообразным, если - альтернативно или дополнительно - на опорном держателе и/или на приемной части для стопы предусмотрен сенсор растяжения (DMS=Dehnungssensor). За счет этого может регистрироваться растяжение отдельных конструктивных частей.
Один другой предпочтительный вариант осуществления предусматривает, что базовый держатель установлен в направляющей, например, в направляющей скольжения. Посредством направляющей может устанавливаться перестановочное направление терапевтического тренажера для ходьбы за счет хода направляющей.
Один предпочтительный стационарный вариант осуществления терапевтического тренажера для ходьбы характеризуется тем, что приемная часть для стопы установлена с возможностью смещения относительно упомянутого по меньшей мере одного базового держателя так, что позволяется латеральное относительно перестановочного направления отклонение стопы или носка обуви пользователя. Нормально здоровый человек при каждодневной ходьбе использует легкую боковую (латеральную) вариацию (отклонение) размещения стопы, чтобы обеспечить возможность оптимального удержания постурального контроля (равновесие). Этот вариант осуществления предусмотрен, так как за счет него стопа пользователя или пациента во время фазы маха ноги может вбок, соответственно, латерально смещаться, соответственно, сдвигаться на несколько сантиметров.
Чтобы ограничить радиус движения бокового смещения, в одном усовершенствовании предусмотрено, что предусмотрен ограничительный блок, который рассчитан так, чтобы позволить ограниченное латеральное отклонение стопы или носка обуви пользователя. Для этого ограничительный блок может включать в себя стопорные элементы, которые ограничивают латеральную подвижность стопы приблизительно 20 см, предпочтительно приблизительно 10 см, более предпочтительно приблизительно 5 см.
Чтобы предотвратить заваливание, один альтернативный терапевтический тренажер для ходьбы характеризуется тем, что предусмотрено удерживающее устройство, которое включает в себя ременную систему. Указанная ременная система в одном варианте осуществления выполнена так, чтобы защищать пользователя от заваливания (падения). Альтернативно или дополнительно ременная система выполнена так, чтобы разгружать/уравновешивать часть веса тела человека (частичное весовое уравновешивание), вследствие чего ноги пользователя должны принимать на себя меньший вес. Удерживающее устройство образовано предпочтительно из вертикальной части, горизонтальной части, а также соединяющего вертикальную часть и горизонтальную часть изгибного участка. За счет этого падающий/заваливающийся пользователь может сверху подхватываться или улавливаться.
В дальнейшем изобретение подробнее поясняется на примерах осуществления, представленных на чертежах, на которых показано:
Фиг.1 вид сбоку мобильного терапевтического тренажера для ходьбы,
Фиг.2 возможный вид сверху на терапевтический тренажер для ходьбы согласно фиг.1,
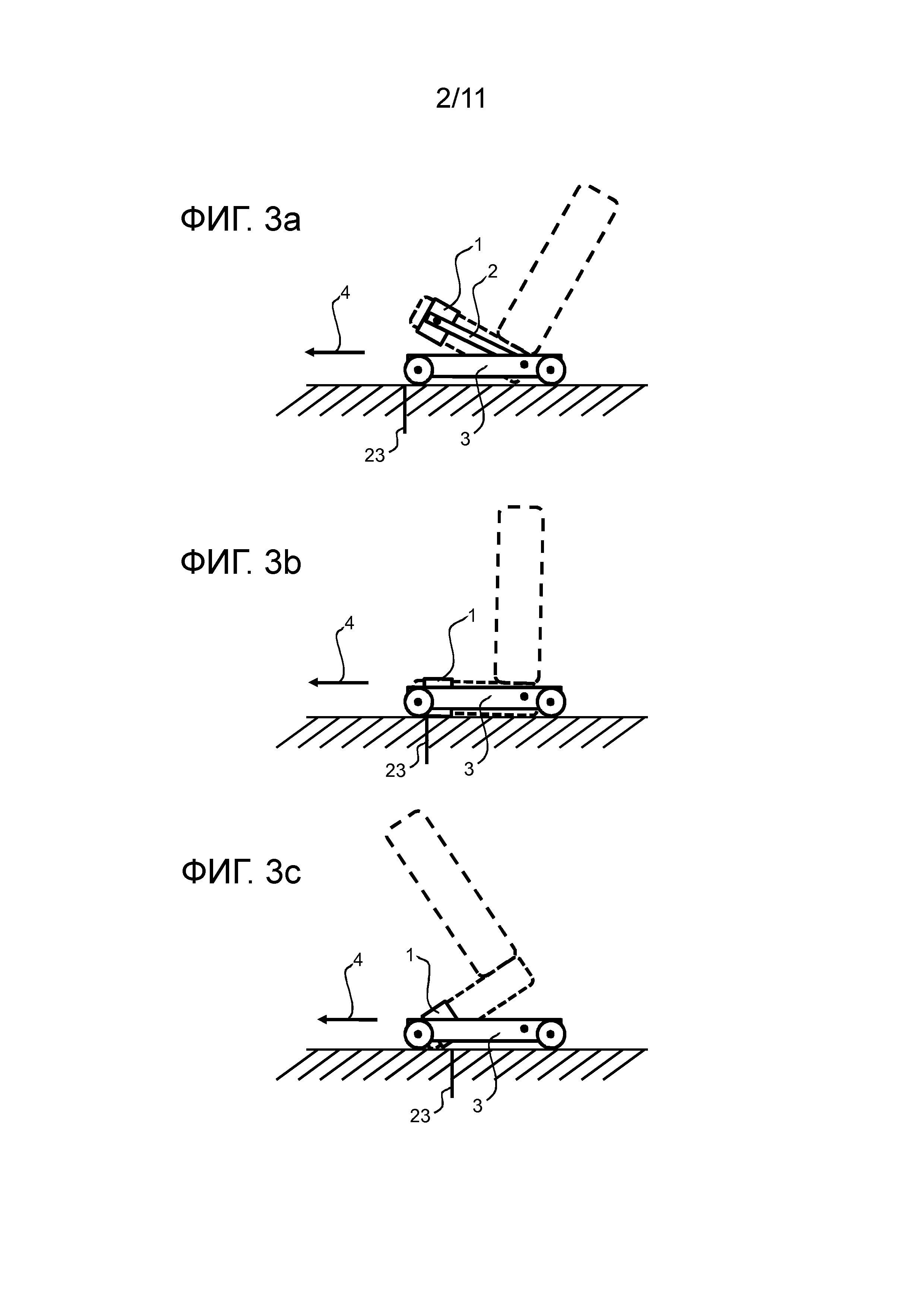
Фиг.3а терапевтический тренажер для ходьбы согласно фиг.1 в поставленной/опущенной конфигурации (фаза опоры ноги),
Фиг.3b терапевтический тренажер для ходьбы согласно фиг.1 в опорной конфигурации (фаза опоры ноги),
Фиг.3с терапевтический тренажер для ходьбы согласно фиг.1 в конфигурации отталкивания (фаза опоры ноги),
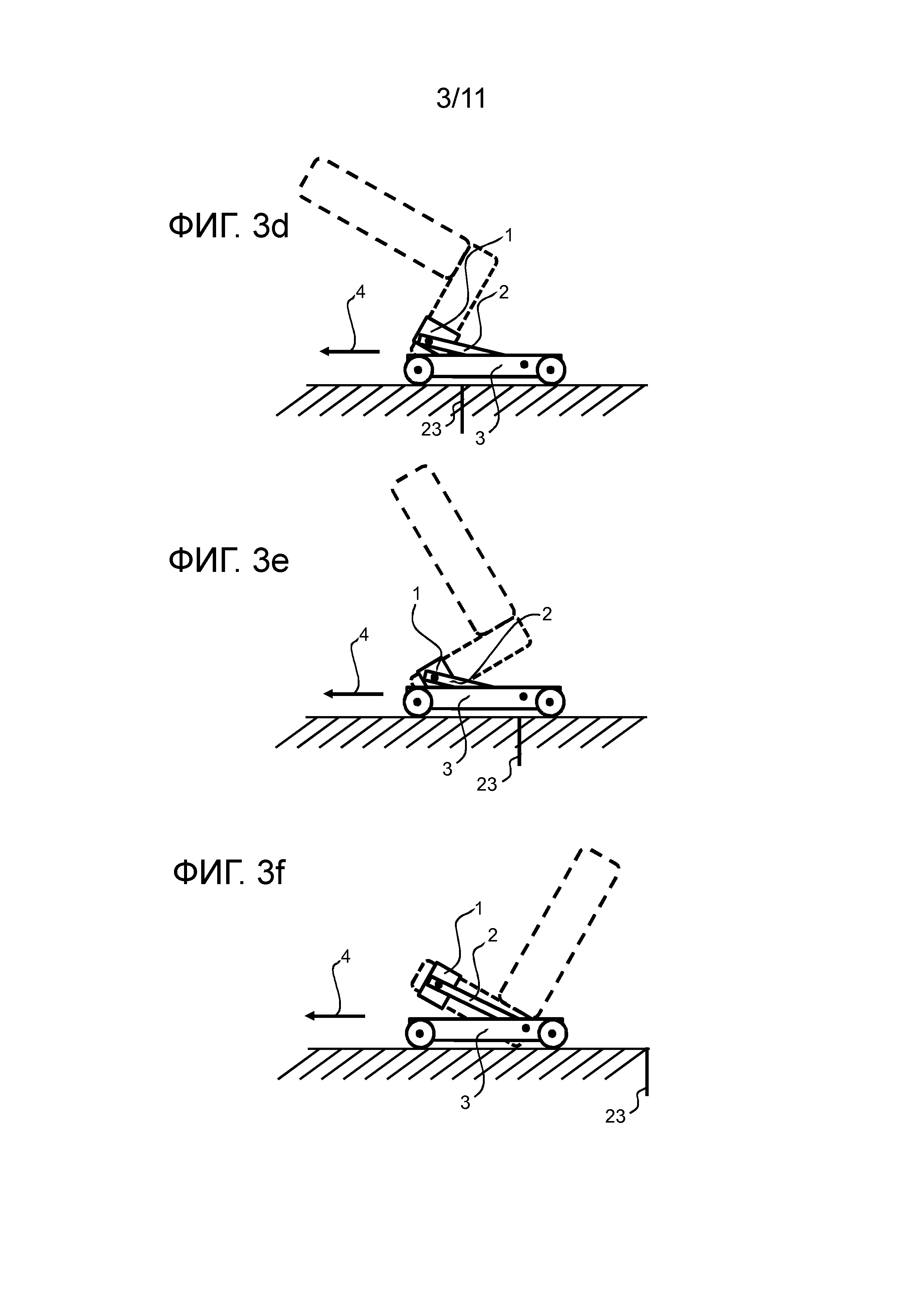
Фиг.3d терапевтический тренажер для ходьбы согласно фиг.1 в конфигурации начальной фазы маха ноги (фаза маха ноги),
Фиг.3е терапевтический тренажер для ходьбы согласно фиг.1 в конфигурации средней фазы маха ноги (фаза маха ноги),
Фиг.3f терапевтический тренажер для ходьбы согласно фиг.1 в конфигурации в конце заключительной фазы маха ноги (фаза маха ноги),
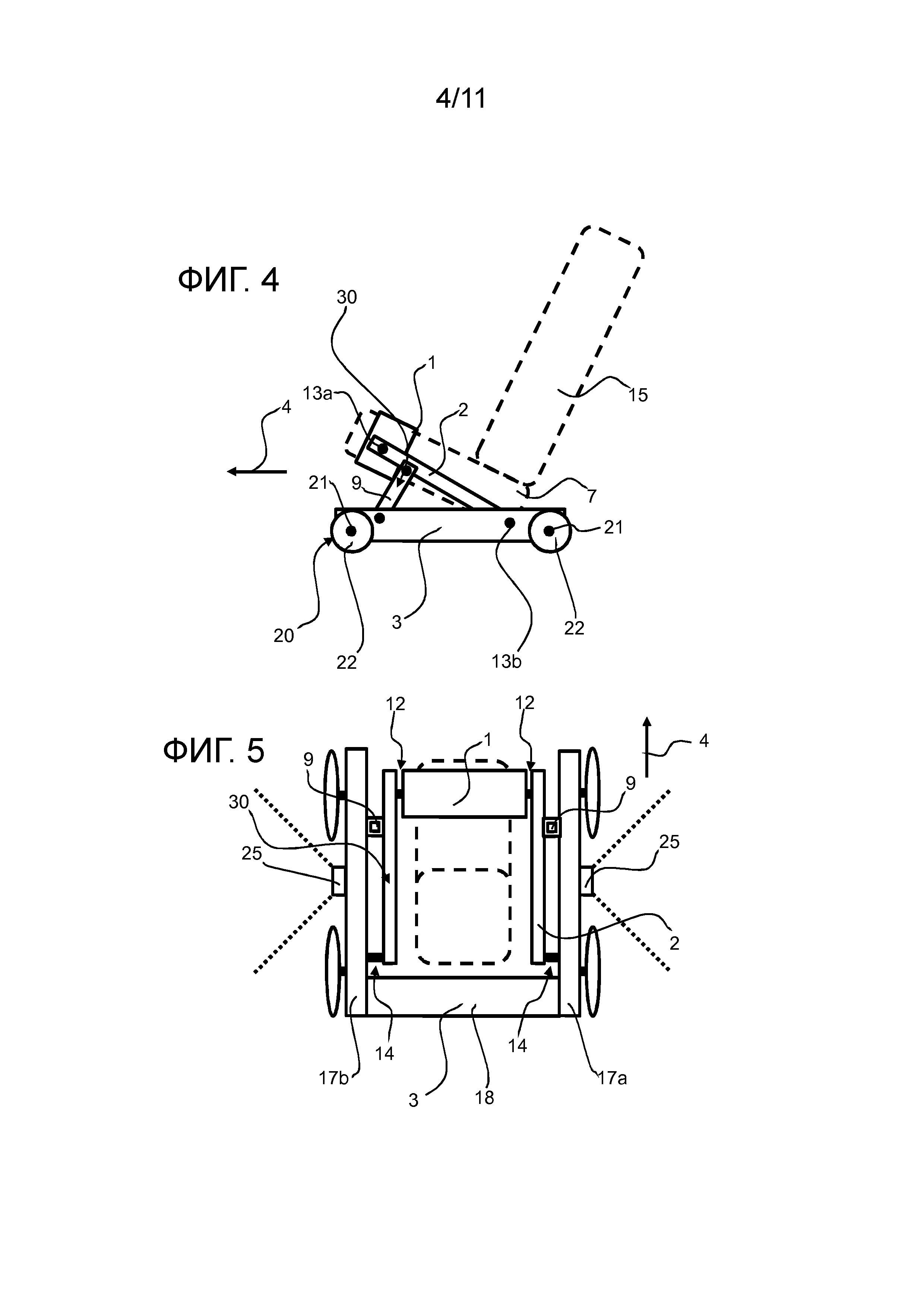
Фиг.4 один другой мобильный терапевтический тренажер для ходьбы с исполнительным элементом, на виде сбоку,
Фиг.5 вид сверху тренажера для ходьбы согласно фиг.4, который дополнен сенсорами,
Фиг.6 вид сбоку тренажера для ходьбы согласно фиг.4, который дополнен тяговым элементом,
Фиг.7 один другой мобильный терапевтический тренажер, на виде сверху,
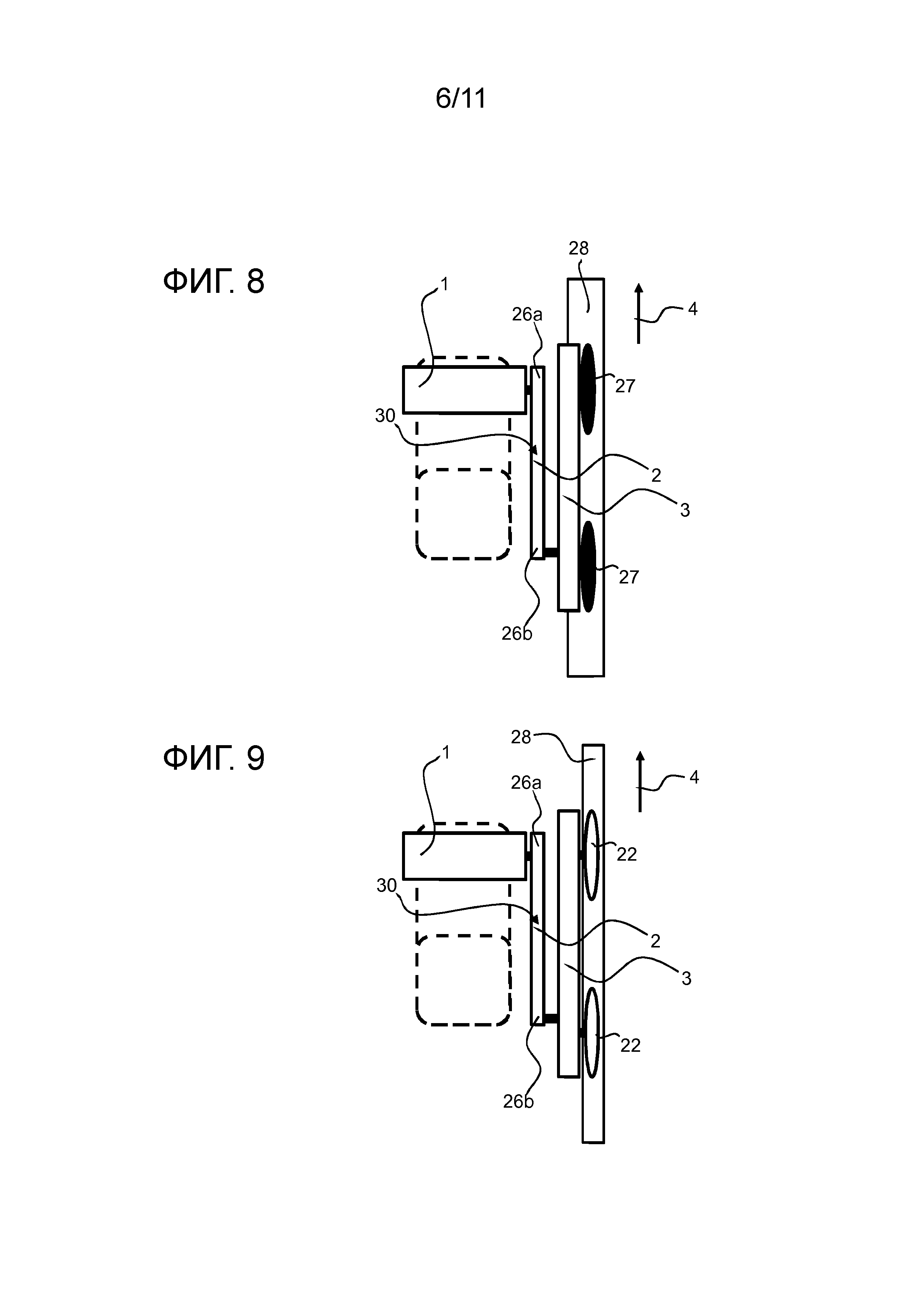
Фиг.8 один другой, установленный в направляющей, стационарный вариант осуществления терапевтического тренажера для ходьбы, и
Фиг.9 один альтернативный, установленный в направляющей, стационарный вариант осуществления терапевтического тренажера для ходьбы согласно фиг.8,
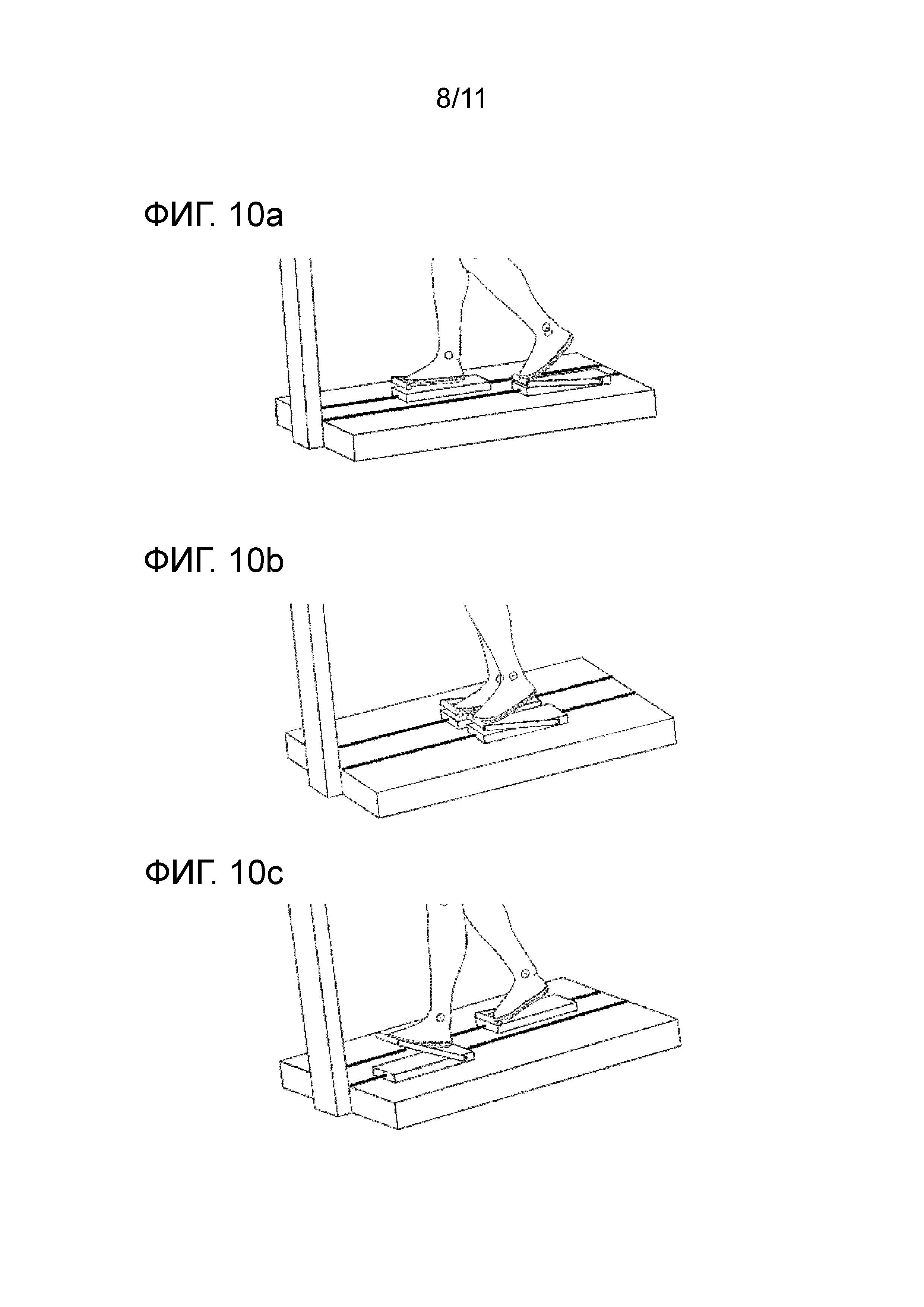
Фиг.10 один другой стационарный вариант осуществления терапевтического тренажера для ходьбы,
Фиг.10а-10f фрагмент терапевтического тренажера для ходьбы из фиг.10 в различных положениях (положения стопы пользователя),
Фиг.11 один другой стационарный вариант осуществления терапевтического тренажера для ходьбы,
Фиг.12а один другой стационарный вариант осуществления терапевтического тренажера для ходьбы в конце фазы маза ноги,
Фиг.12b тренажер для ходьбы из фиг.12а во время фазы опоры,
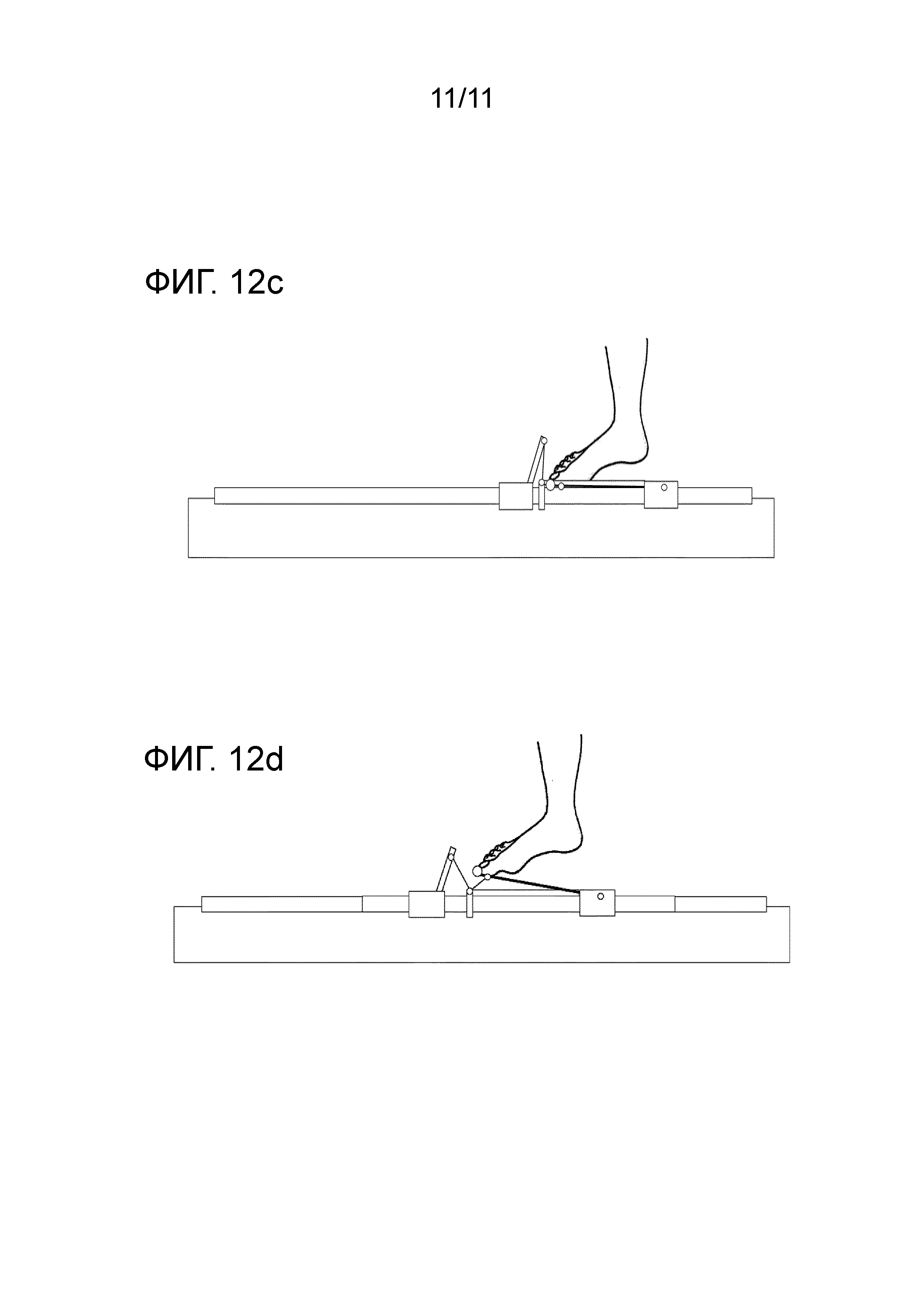
Фиг.12с тренажер для ходьбы из фиг.12а во время фазы отталкивания, и
Фиг.12d тренажер для ходьбы из фиг.12а во время фазы маха ноги.
На фигурах показаны несколько терапевтических тренажеров для ходьбы, которые включают в себя приемную часть 1 для стопы для приема частичной области переднего отдела стопы пользователя или для образования предпочтительно разъемного соединения с носком обуви. Далее, предусмотрен по меньшей мере один базовый держатель 3, выполненный с возможностью перемещения в и/или против перестановочного направления 4.
Кроме того, терапевтический тренажер для ходьбы включает в себя активно и/или пассивно приводимый перестановочный блок 30 для относительной, ориентированной по существу перпендикулярно перестановочному направлению 4 перестановки приемной части 1 для стопы относительно упомянутого по меньшей мере одного базового держателя 3.
В случае тренажеров для ходьбы согласно фиг.1-10 перестановочный блок 30 включает в себя опорный держатель 2. Этот опорный держатель 2 либо поворотно-шарнирно соединен с приемной частью 1 для стопы, либо расположен без возможности поворота относительно нее. В частности, в случаях, в которых носок обуви соединен с приемной частью 1 для стопы по принципу крепления беговых лыж, опорный держатель 2 установлен предпочтительно без возможности поворота относительно приемной части 1 для стопы.
Однако, в обоих случаях опорный держатель 2 на другом конце поворотно-шарнирно соединен с базовым держателем 3, причем базовый держатель 3 выполнен с возможностью перестановки или перемещения в и/или против перестановочного направления 4.
Если приемная часть 4 для стопы расположена поворотно относительно опорного держателя 2, то между опорным держателем 2 и приемной частью 1 для стопы предусмотрен первый поворотный шарнир 12 (опорный держатель-приемная часть-шарнир), посредством которого обеспечивается возможность вращения приемной части 1 для стопы относительно опорного держателя 2 вокруг оси 13а, расположенной по существу перпендикулярно перестановочному направлению 4. В одном экономичном варианте тренажера для ходьбы предусмотрена штифтовая опора в качестве поворотно-шарнирного соединения между опорным держателем 2 и приемной частью 1 для стопы.
Далее, имеется поворотно-шарнирное соединение между опорным держателем 2 и базовым держателем 3, так что опорный держатель 2 установлен поворотно относительно базового держателя 3. Здесь предусмотрен второй поворотный шарнир 14 (опорный держатель-базовый держатель-поворотный шарнир), который является поворотным также вокруг оси 13b, ориентированной по существу перпендикулярно перестановочному направлению 4. При этом, в одном экономичном варианте осуществления также предусмотрена штифтовая опора.
Как следует, в частности, из вида сверху на мобильный вариант терапевтического тренажера для ходьбы на фиг.2, на базовом держателе 3 образовано свободное пространство 5, которое выполнено так, что на поверхность 6 для ходьбы, соответственно, пол может наступать по меньшей мере часть стопы 7 пользователя. Голень 15 и стопа 6 пользователя на всех фигурах представлены штриховыми линиями. Как следует из фиг.2, приемная часть 1 для стопы расположена по центру для приема по меньшей мере частичной области переднего отдела стопы пользователя. Эта приемная часть 1 для стопы в данном случае поворотно установлена между опорными держателями 2, а именно первым опорным держателем 16а (с правой стороны приемной части 1 для стопы) и расположенным на противоположной первому опорному держателю 16а стороне приемной части 1 для стопы вторым опорным держателем 16b (с левой стороны приемной части 1 для стопы). Первый опорный держатель 16а, который в перестановочном направлении 4 расположен на правой стороне стопы пользователя, в свою очередь шарнирно соединен с первым продольным держателем (продольная балка) 17а. Второй опорный держатель 16b расположен на левой в перестановочном направлении 4 стороне стопы 7 и в свою очередь шарнирно соединен со вторым продольным держателем 17b. Далее, первый продольный держатель 17а и второй продольный держатель 17b соединены посредством поперечного держателя (поперечная балка), в частности заднего поперечного держателя 18, так что в целом возникает U-образный базовый держатель 3. В одном другом варианте осуществления поперечный держатель расположен на обращенной к приемной части 1 для стопы и продольным держателям 17а, 17b стороне терапевтического тренажера для ходьбы, так что в таком случае он в качестве переднего поперечного держателя 19 образует U-образный базовый держатель 3.
Чтобы продвигать базовый держатель 3, с одной стороны, может быть предусмотрено приводное устройство, посредством которого базовый держатель 3 и, тем самым, весь терапевтический тренажер для ходьбы может моторизованно переставляться или перемещаться. Однако, альтернативно также нажимной элемент, например, толкающая штанга, может воздействовать на базовую раму, в частности, на задний поперечный держатель 18, чтобы сдвинуть терапевтический тренажер для ходьбы в перестановочном направлении 4, или тянуть против перестановочного направления 4.
Как следует из фигур, в данном случае на базовом держателе 3 размещены ролики 20, посредством которых терапевтический тренажер для ходьбы может переставляться или перемещаться в и/или против перестановочного направления 4. В данном случае, ролики 20 образованы расположенными на осях 21 колесами 22, которые соединены с базовым держателем 3. Один альтернативный вариант предусматривает, что отдельные колеса 22, предпочтительно даже все колеса 22, являются приводными посредством приводного устройства. В данном случае, предусмотрены точно четыре ролика 20, причем также возможно другое количество. Вместо колес 22 также могут предусмотрены другие элементы скольжения, посредством которых терапевтический тренажер для ходьбы может переставляться в и/или против перестановочного направления 4.
На основе фиг.3а-3f будет подробнее поясняться принцип функционирования всего имеющегося терапевтического тренажера для ходьбы. Чтобы показать, что указанный терапевтический тренажер смещается на поверхности 6 для ходьбы, предусмотрена маркировка 23. При этом, фиг.3а-3с показывают конфигурации (соответственно, положения) тренажера для ходьбы во время фазы опоры ноги, а фиг.3d-3f показывают конфигурации (соответственно, положения) тренажера для ходьбы во время фазы маха ноги.
Прежде всего, пятка пользователя - без весовой нагрузки - достигает пола, соответственно, поверхности 6 для ходьбы (фиг.3а). При этом, при взгляде слева приемная часть 2 для стопы слегка повернута по часовой стрелке относительно опорного держателя 2. Затем осуществляется восприятие нагрузки посредством показанной ноги, причем подошва ступни пользователя входит в контакт с грунтом (фиг.3b). При этом опорный держатель 2 при взгляде слева повернут против часовой стрелки относительно базового держателя 3, так что он ориентирован почти параллельно ему. В средней фазе опоры стопа 7 пользователя находится примерно под центром тяжести тела и весь вес тела действует на ногу. В случае здорового пользователя посредством задних мышц голени осуществляется ход вперед тела, причем синхронно со смещением тела вперед происходит перекатывающее движение на стопе 7 до тех пор, пока не будет достигнута фаза отталкивания (фиг.3с). Это движение вперед может поддерживаться посредством выполненного с возможностью перемещения или перестановки базового держателя 3.
За фазой опоры ноги следует фаза маха ноги, которая начинается с подъема ноги после фазы опоры ноги. Бедро приподнимается посредством мышц бедра пользователя, а голень - посредством мышц сгибания колена пользователя, причем стопа 7 сначала остается пассивной (фиг.3d). В этой конфигурации - при взгляде слева - приемная часть 1 для стопы поворачивается против часовой стрелки относительно опорного держателя 2. Опорный держатель 2, в свою очередь, поворачивается по часовой стрелке относительно базового держателя 3. Оба поворота могут в одном приводном варианте также моторизованно поддерживаться.
В средней фазе маха ноги нога посредством сгибания в тазобедренном суставе перемещается вперед, в то время как колено согнуто приблизительно на 90 градусов (фиг.3е). На фиг.3е приемная часть 1 для стопы уже вновь повернута обратно по часовой стрелке относительно опорного держателя 2. Дополнительно в средней фазе маха ноги пальцы и стопа 7 активно поднимаются, что в данном случае может быть реализовано посредством поворота опорного держателя 2 относительно базового держателя 3. В этой конфигурации стопа 7 может направляться вперед на расстоянии от поверхности 6 для ходьбы, то есть в направлении перестановочного направления 4. Другими словами, терапевтический тренажер для ходьбы поддерживает стопу 7 пользователя при надлежащей «траектории». Кроме того, в этой фазе сгибание в тазобедренном суставе принимает свой наибольший размер.
В заключительной фазе маха ноги нога вновь опускается в направлении поверхности 6 для ходьбы, причем колено активно выпрямляется, а стопа 7 удерживается в нейтральном положении (фиг.3f). Расположенный с возможностью поворота на базовом держателе 3 опорный держатель 2 поддерживает стопу 7 пользователя при предстоящем касании пола пяткой, так что она не так сильно ударяется о поверхность 6 для ходьбы.
Терапевтический тренажер для ходьбы поддерживает стопу 7 пользователя в каждой отдельной фазе, так что с помощью этого тренажера может достигаться почти естественный шаговый цикл.
На фиг.4 показано другое выполнение мобильного терапевтического тренажера для ходьбы, причем в этом варианте осуществления предусмотрен исполнительный элемент 9, посредством которого опорный держатель 2 может поворачиваться относительно базового держателя 3. Этот исполнительный элемент 9 позволяет бесступенчатую перестановку опорного держателя 2 и тем самым приемной части 1 для стопы относительно базового держателя 3 между приподнятым положением (срв. фиг.3а) и опущенным положением (срв. фиг.3b).
В настоящем случае исполнительный элемент 9 установлен с возможностью поворота на базовом держателе 3, в частности на продольных держателях 17а, 17b. Далее, управляющий орган 10 образован на исполнительном элементе 9, который может перемещаться вдоль опорной поверхности или управляющего кулачка 11 на опорном держателе 2. Посредством скользящего вдоль управляющего кулачка 11 управляющего органа 10 может подниматься, соответственно, опускаться опорный держатель 2 и тем самым приемная часть 1 для стопы.
Для подъема или опускания переднего отдела стопы пользователя может быть предусмотрен тяговый элемент, как это показано, например, на фиг.6. Здесь тяговый элемент 8 воздействует на исполнительный элемент 9 в области управляющего органа 10. Посредством действующего не параллельно продольному направлению тягового усилия может поворачиваться образованный в виде качающегося рычага 24 исполнительный элемент 9. Этот поворот наряду с горизонтальной составляющей усилия одновременно предоставляет вертикальную составляющую усилия, посредством которой опорный держатель 2 и тем самым приемная часть 1 для стопы могут подниматься. Горизонтальная составляющая усилия способствует перемещению базового держателя 3 в и/или против перестановочного направления 4. Альтернативно или дополнительно наряду с показанным тяговым элементом 8 может использоваться другой второй тяговый элемент, посредством которого базовый держатель 3 может переставляться за счет воздействующего на исполнительный элемент 9 (вертикального) тягового элемента отдельно вдоль поверхности 6 для ходьбы. Другими словами, тяговый элемент 9 в таком случае действует для приведения в действие исполнительного элемента 9 (исполнительный тяговый элемент), а второй тяговый элемент - для перестановки или перемещения базового держателя 3.
На фиг.5 показано другое выполнение мобильного терапевтического тренажера для ходьбы, которое имеет принципиально такую же конструкцию, как и та, которая показана на фиг.4. Здесь также предусмотрены исполнительные элементы 9 для перестановки опорного держателя 2 и тем самым приемной части 1 для стопы. Дополнительно - схематично представлено - предусмотрен по меньшей мере один, предпочтительно несколько сенсоров 25 для регистрации позиции смежной, предпочтительно свободной стопы. В настоящем случае сенсоры 25 образованы в виде оптических камерных систем, посредством которых может регистрироваться позиция соседней ноги, соответственно, ступни. При этом базовый держатель 3 служит в качестве корпуса для сенсоров 25, так что другими словами эти сенсоры 25 приняты в базовом держателе 3. В зависимости от позиции смежной ноги посредством интеллектуальной логики и/или управления терапевтический тренажер для ходьбы может перемещаться соответственно текущей фазе шага. Далее, посредством вышестоящего (верхний уровень) управляющего компьютера уровень (по высоте) приемной части 1 для стопы может варьироваться и настраиваться в зависимости от позиции смежной ноги в фазе маха ноги.
На фиг.7 показан другой вариант осуществления мобильного терапевтического тренажера для ходьбы, который по существу соответствует тому, который описан на фиг.2. Однако, он дополнен передним поперечным держателем 19, так что в целом возникает рамообразный базовый держатель 3, который имеет соответствующее свободное пространство 5 для прохода стопы 7. В случае этого варианта осуществления стопа 7 пользователя защищена по кругу посредством рамообразного базового держателя 3.
Фиг.8 показывает другой стационарно приводимый терапевтический тренажер для ходьбы, который имеет приемную часть 1 для стопы, которая вращательно-шарнирно, соответственно, поворотно расположена на первом конце 26а опорного держателя 2. На втором конце 26b опорного держателя 2 шарнирно, соответственно, поворотно расположен базовый держатель 3, как это также было в случае предшествующих примеров осуществления. Однако, в отличие от них в случае этого тренажера для ходьбы предусмотрено, что базовый держатель 3 теперь имеет элементы 27 скольжения, которые в свою очередь установлены в рельсовой направляющей 28.
Вместо элементов 27 скольжения также могут использоваться колеса 22, в частности, приводные колеса 22, чтобы обеспечить возможность перестановки или перемещения терапевтического тренажера по ходьбе в и/или против перестановочного направления 4 в рельсовой направляющей 28. Это можно видеть в случае тренажера для ходьбы согласно фиг.9.
На фиг.10 показан предпочтительный вариант осуществления соответствующего изобретения тренажера для ходьбы с активно и/или пассивно приводимым перестановочным блоком 30 для относительной, ориентированной по существу перпендикулярно перестановочному направлению 4 перестановкой приемной части 1 для стопы относительно упомянутого по меньшей мере одного базового держателя 3. В настоящем случае для каждой стопы пользователя предусмотрено по одному базовому держателю 3. Базовые держатели 3 этого варианта осуществления отличаются от такового согласно фиг.1-9 тем, что они имеют наступательную поверхность 50, которая рассчитана таким образом, чтобы на нее наступала стопа 7 пользователя или обувь. Другими словами базовый держатель 3 согласно фиг.10 не имеет свободного пространства 5 и пользователи могут стоять на собственно базовом держателе 3. Также здесь опорный держатель 2 на заднем первом конце размещен поворотно-шарнирно на базовом держателе 3. Другой конец опорного держателя 2 либо поворотно-шарнирно, либо без возможности поворота соединен с приемной частью 1 для стопы, так что присоединение приемной части 1 к опорному держателю 2 или опорным держателям 2 осуществляется аналогично уже поясненным выше тренажерам для ходьбы. Базовые держатели 3 в настоящем случае направляются в направляющих 70, соответственно, в кулисе. Альтернативно или дополнительно в направляющей 70 может направляться тяговый элемент 8, например, в форме цепи, зубчатого ремня, посредством зубчатых колес, с тросовой тягой или тому подобным. Тяговый элемент 8 действует между схематически обозначенным индикаторным устройством 40 и соответствующим базовым держателем 3. Другими словами тяговые элементы 8 моторизованно приводят базовый держатель 3 в и/или против перестановочного направления 4. Далее, этот вариант осуществления имеет образованное из вертикальной части 62 и горизонтальной части 63 удерживающее устройство 60 с ременной системой 61. Вертикальная часть 62 и горизонтальная часть 63 соединены друг с другом посредством изгибного участка 64. Закрепленная на горизонтальной части 63 ременная система 61 служит для удержания пользователя и оберегает его от падения. Для этого, изгибной участок предоставляет пружинное усилие, так что падающий (заваливающийся) пользователь затормаживается посредством пружинно установленной горизонтальной части 63 и мягко улавливается ременной системой 61. Предпочтительным образом, ременная система 61 при ходьбе на терапевтическом тренажере для ходьбы действует не «на растяжение», а лишь в действительном случае падения. Таким образом, не создается препятствий для осуществляемого на тренажере естественного шагового цикла. Приемные части 1 для стопы согласно фиг.10 могут дополнительно устанавливаться с возможностью смещения относительно соответствующего базового держателя 3 таким образом, что позволяет латеральное относительно перестановочного направления 4 и ограниченное ограничительным блоком отклонение стопы 7 или носка обуви пользователя. Для этого, например, с приемной частью 1 для стопы могли бы быть согласованы цилиндрические трубки, которые могут скользить вдоль цилиндрического штифта. Фиг.10а-10f показывают отличающиеся положения стоп, соответственно, ног на тренажере для ходьбы согласно фиг.10.
На фиг.11 показан другой терапевтический тренажер для ходьбы с перестановочным блоком 30, который выполнен с возможностью вертикальной перестановки на стороне носка стопы пользователя. Также здесь базовый держатель 3 снабжен наступательной поверхностью 50, однако данный тренажер для ходьбы обходится без опорного держателя 2. Поэтому перестановочный блок 30 имеет вертикальную направляющую 31 с моторизованно приводимым исполнительным элементом 32, которая может переставлять приемную часть 1 для стопы относительно базового держателя 3 между приподнятым и опущенным положениями. Также этот базовый держатель 3 со своим перестановочным блоком 30 может использоваться на устройстве согласно фиг.10.
На фиг.12а-12d показан другой вариант осуществления терапевтического тренажера для ходьбы, в котором базовый держатель 3 в пяточной области поворотно-шарнирно соединен с опорным держателем 2. Далее, предусмотрен линейный двигатель 80, которые через отклоняющий рычаг 81 соединен с опорным держателем 2. Линейный двигатель 80 выполнен с возможностью перемещения вдоль линейной направляющей 82 в и/или против перестановочного направления 4. Отклоняющий рычаг 81 обеспечивает с отклоняющим проводом 83 подъем приемной части 1 для стопы.
Все тренажеры для ходьбы имеют предпочтительным образом то свойство, что исполнительные элементы и/или поддерживающие блоки для поддержки естественного шагового цикла вмешиваются только в тех случаях, в которых пользователь также действительно нуждается в поддержке. Следовательно, только тогда, когда сам пользователь не производит требуемую активность.
Список ссылочных позиций
1 приемная часть для стопы
2 опорный держатель
3 базовый держатель
4 перестановочное направление
5 свободное пространство
6 поверхность для ходьбы
7 стопа
8 тяговый элемент
9 исполнительный элемент
10 управляющий орган
11 управляющий кулачок
12 первый поворотный шарнир
13а ось
13b ось
14 второй поворотный шарнир
15 голень
16а первый опорный держатель
16b второй опорный держатель
17а первый продольный держатель
17b второй продольный держатель
18 задний поперечный держатель
19 передний поперечный держатель
20 ролики
21 ось
22 колеса
23 маркировка
24 качающийся рычаг
25 сенсор
26а первый конец
26b второй конец
27 элементы скольжения
28 рельсовая направляющая
30 перестановочный блок
31 вертикальная направляющая
32 исполнительный элемент
40 приводное устройство
50 наступательная поверхность
60 удерживающее устройство
61 ременная система
62 вертикальная часть
63 горизонтальная часть
64 изгибной участок
70 рельс
80 линейный двигатель
81 отклоняющий рычаг
82 линейная направляющая
83 отклоняющий провод
Реферат
Изобретение относится к медицине, а именно к терапевтическим тренажерам для ходьбы. Тренажер содержит приемную часть для стопы для приема области переднего отдела стопы пользователя или для образования соединения с носком обуви, базовый держатель и перестановочный блок. Базовый держатель выполнен с возможностью моторизированной перестановки посредством приводного устройства в и/или против перестановочного направления. Перестановочный блок является активно и/или пассивно моторизованно приводимым посредством привода исполнительного элемента для ориентированной перпендикулярно перестановочному направлению перестановки приемной части для стопы между приподнятым и опущенным положением. Принимающая по меньшей мере частичную область переднего отдела стопы или образующая соединение с носком обуви приемная часть для стопы выполнена с возможностью перестановки относительно упомянутого по меньшей мере одного базового держателя между приподнятым и опущенным положением. Достигается возможность реализации функции мышцы разгибателя стопы, которую у здоровых людей выполняет передняя большеберцовая мышца. 11 з.п. ф-лы, 26 ил.
Комментарии