Система раздельного сбора и транспортировки мусора - RU2638531C2
Код документа: RU2638531C2
Чертежи
Описание
Настоящее изобретение относится к области коммунального хозяйства, в частности к системам раздельного сбора и транспортировки мусора в лесопарковых зонах и скверах, образующегося в результате праздничных народных гуляний и общественных мероприятий.
Известен мусоровоз [1], содержащий манипулятор для загрузки мусора.
Недостатками данного мусоровоза являются: громоздкость, исключающая его применение в лесопарковых зонах и скверах; необходимость в водителе для транспортировки мусора; невозможность раздельного сбора мусора; ограниченность зоны действия.
Известна также система [2] обращения с твердыми отходами потребления, содержащая пункт контроля и управления (командный пункт), включающий последовательно соединенные радиостанцию, процессор (компьютер) и рабочее место диспетчера с устройством регистрации (монитором), по меньшей мере, одно транспортное средство для перевозки отходов (мусора) с радиостанцией, датчиками характера отходов и сигнальными датчиками, при этом радиостанции пункта контроля и управления (командного пункта) и транспортного средства связаны между собой радиоканалом, а в качестве сигнального датчика транспортного средства использован датчик полной загрузки, что она снабжена по меньшей мере одним средством сбора отходов на основе емкости для отходов, снабженной по меньшей мере одним приемным бункером, при этом радиостанция, датчики характера отходов и сигнальные датчики транспортного средства для перевозки отходов подключены к блоку управления и обработки (компьютеру).
Недостатками данной системы обращения с твердыми отходами потребления являются ее сложность, а также отсутствие возможности раздельного сбора и транспортировки мусора в лесопарковых зонах и скверах без участия клиентов (местных жителей) и водителей транспортных средств.
Наиболее близкой к предлагаемой системе раздельного сбора и транспортировки мусора является система [3] видеонаблюдения с транспортного средства, находящегося в движении, содержащая несколько транспортных средств, число которых определяется сложностью и площадью охраняемой территории, каждое из которых содержит видеокамеру высокого разрешения с возможностью изменения ее фокусного расстояния, и (или) изменения диафрагмы, и (или) настройки на фокус для обеспечения наведения на цель (элемент мусора), подключенную через плату видеоввода к компьютеру, к которому подключено приемно-передающее устройство (радиостанция) транспортного средства, обеспечивающее связь по радиоканалу через приемно-передающее устройство (радиостанцию) командного пункта с компьютером командного пункта, к которому подключен монитор наблюдения, на транспортном средстве установлены датчик измерения направления его перемещения, датчик пройденного пути, ультразвуковой локационный датчик и устройство тревожной сигнализации, соединенные с компьютером транспортного средства, к которому подключены первые приводы горизонтального и вертикального перемещения видеокамеры высокого разрешения, выходы которых соединены с соответствующими входами первой пары датчиков горизонтального и вертикального углов поворота, своими выходами подключенные к компьютеру транспортного средства, а транспортное средство дополнительно содержит несколько видеокамер, подключенных к компьютеру через мультиплексор, две из которых, расположенные под определенным углом относительно друг друга, составляют систему стереонаблюдения, а одна из дополнительных видеокамер оборудована вторыми приводами горизонтального и вертикального перемещения, управляющие входы которых соединены с компьютером, а вторые выходы подключены к соответствующим входам второй пары датчиков горизонтального и вертикального углов поворота, своими выходами подключенные к компьютеру, на транспортном средстве установлены штанга, снабженная исполнительным механизмом, вход управления которого подключен к компьютеру транспортного средства, и, подключенные к компьютеру транспортного средства датчик горизонтального уровня и регулируемая подвеска транспортного средства.
Недостатком этой системы видеонаблюдения с транспортного средства, находящегося в движении, является невозможность раздельного сбора мусора в процессе движения транспортного средства.
Целью настоящего изобретения является расширение функциональных возможностей и повышение эффективности системы путем обеспечения раздельного сбора и транспортировки мусора в лесопарковых зонах отдыха и скверах без привлечения людей (уборщиков, дворников).
Для достижения поставленной цели в систему раздельного сбора и транспортировки мусора, содержащую несколько транспортных средств, число которых определяется сложностью и площадью убираемой территории, каждое из которых содержит видеокамеру высокого разрешения с возможностью изменения ее фокусного расстояния, и (или) изменения диафрагмы, и (или) настройки на фокус для обеспечения наведения на элемент мусора, подключенную через плату видеоввода к компьютеру, к которому подключена радиостанция транспортного средства, обеспечивающая связь по радиоканалу через радиостанцию командного пункта с компьютером командного пункта, к которому подключен монитор наблюдения, на транспортном средстве установлены датчик измерения направления его перемещения, датчик пройденного пути, ультразвуковой локационный датчик и устройство сигнализации, соединенные с компьютером транспортного средства, к которому подключены первые приводы горизонтального и вертикального перемещения видеокамеры высокого разрешения, выходы которых соединены с соответствующими входами первой пары датчиков горизонтального и вертикального углов поворота, своими выходами подключенные к компьютеру транспортного средства, а транспортное средство дополнительно содержит несколько видеокамер, подключенных к компьютеру через мультиплексор, две из которых, расположенные под определенным углом относительно друг друга, составляют систему стереонаблюдения, а одна из дополнительных видеокамер, расположенная на штанге, оборудована вторыми приводами горизонтального и вертикального перемещения, управляющие входы которых соединены с компьютером, а вторые выходы подключены к соответствующим входам второй пары датчиков горизонтального и вертикального углов поворота, своими выходами подключенные к компьютеру, при этом на транспортном средстве установлены датчик горизонтального уровня и регулируемая подвеска транспортного средства, подключенные к компьютеру, а штанга снабжена исполнительным механизмом, вход управления которого подключен к компьютеру транспортного средства, введены укрепленный на штанге манипулятор, соединенный с исполнительным механизмом, датчики полной загрузки, подключенные к компьютеру и установленные в приемных бункерах, находящихся в прицепном средстве сбора мусора, датчики характера (типа) мусора, подключенные к компьютеру и установленные в зоне захвата манипулятора вместе с видеокамерой высокого разрешения, при этом манипулятор имеет возможность вращения вокруг штанги, а в качестве датчиков характера (типа) мусора используются датчики бумаги, пластических масс, стекла и металла.
Предложенное техническое решение обладает новизной, изобретательским уровнем и промышленной применимостью, т.е. всеми критериями изобретения.
Новизна и изобретательский уровень подтверждены патентными исследованиями, а промышленная применимость обусловлена тем, что для реализации системы необходимы серийно выпускаемые недефицитные компоненты: компьютеры, видеокамеры, радиостанции, датчики и т.д.
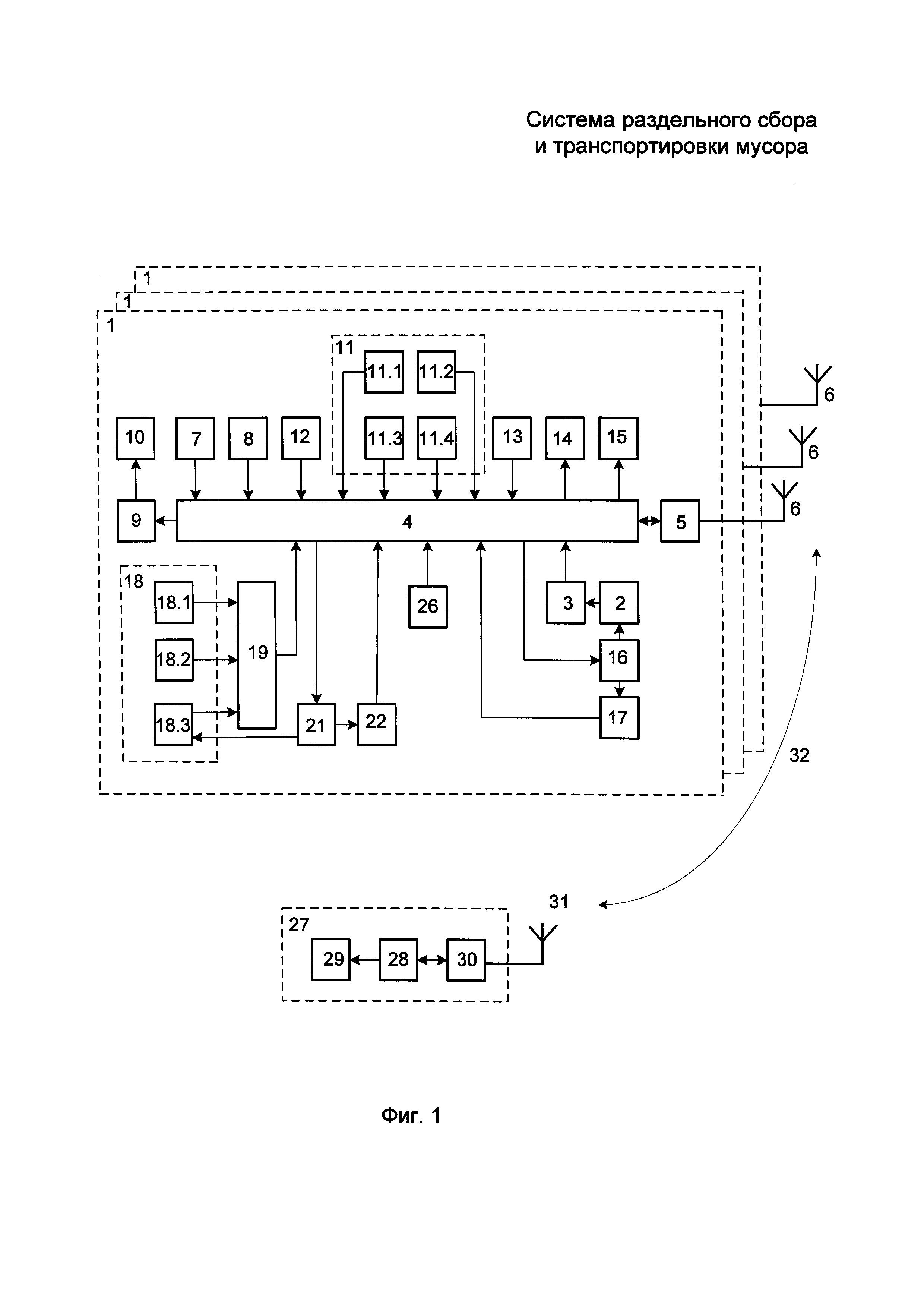
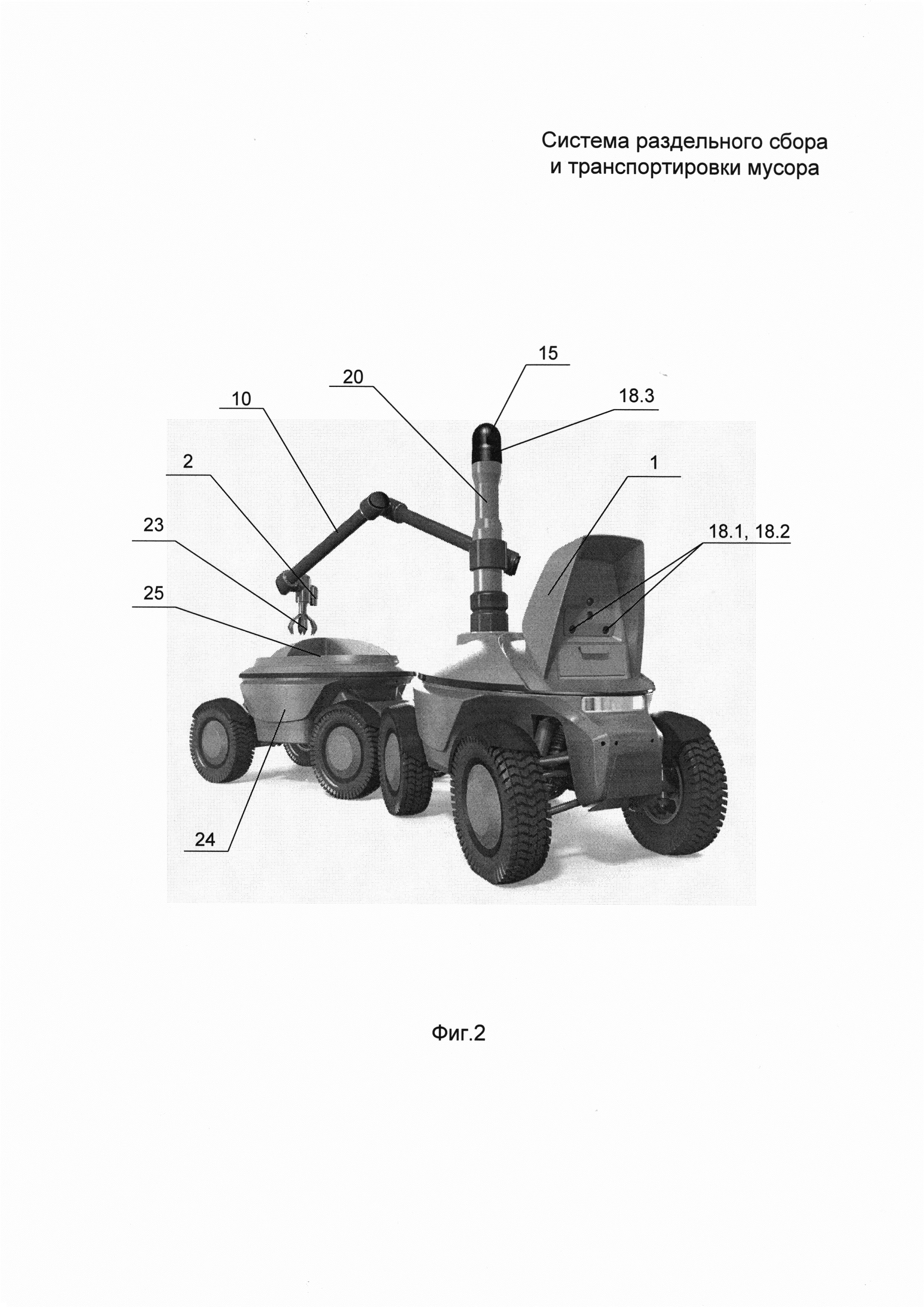
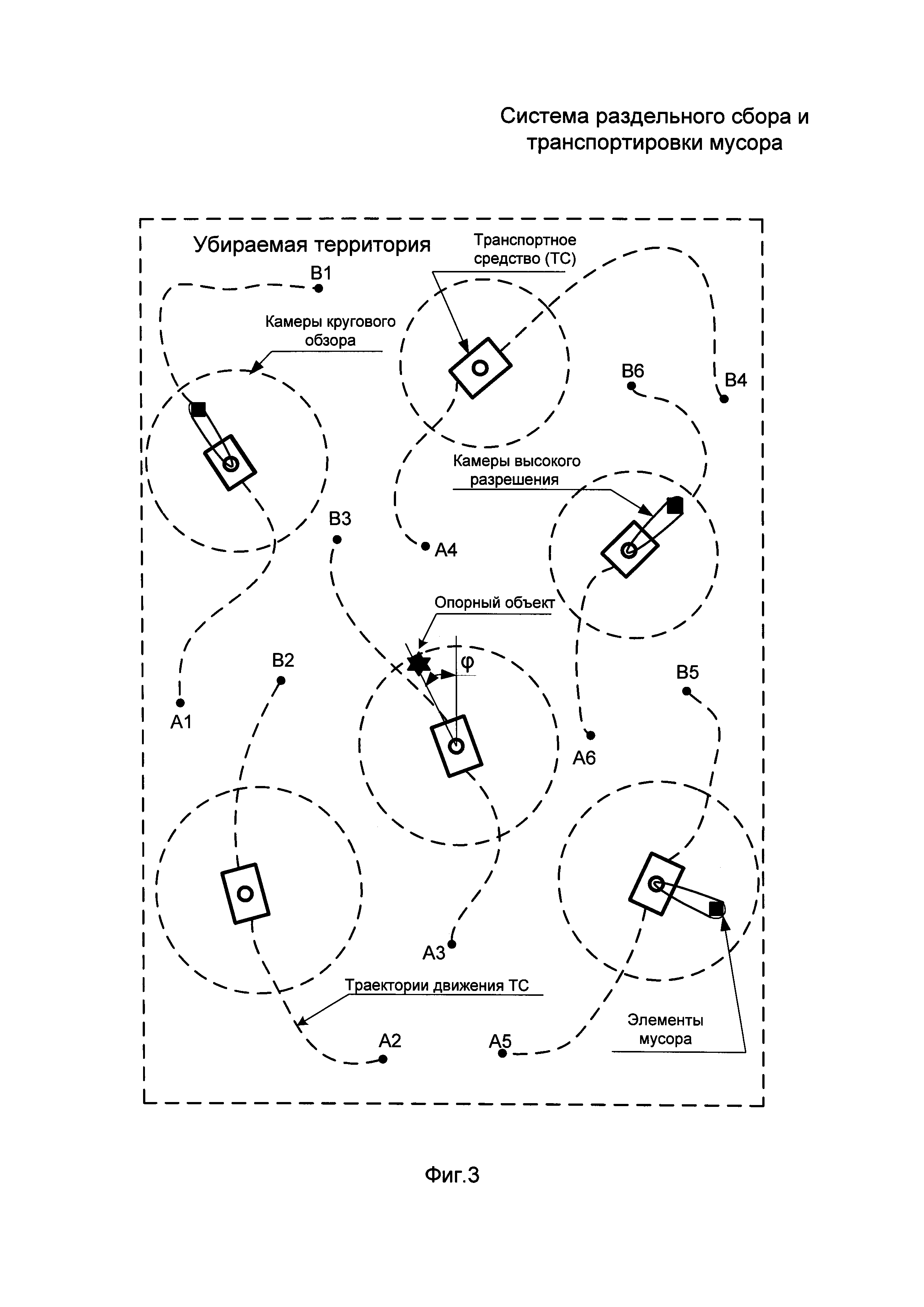
Сущность изобретения поясняется на чертежах (фиг. 1- фиг. 3), где на фиг. 1 приведена структурная схема системы на примере одного транспортного средства, на фиг. 2 приведен общий вид одного транспортного средства с прицепным средством сбора мусора и приемными бункерами, а на фиг. 3 - принцип работы системы с использованием нескольких транспортных средств.
На каждом транспортном средстве 1 (фиг. 1, фиг. 2), число которых выбирается с учетом сложности и протяженности убираемой территории, установлена видеокамера 2 высокого разрешения, с возможностью изменения фокусного расстояния, и (или) изменения диафрагмы, и (или) настройки на фокус для обеспечения наведения на элемент мусора, подключенная через плату видеоввода 3 (фиг. 1) к компьютеру 4, к которому подключена радиостанция 5 с антенной 6. К компьютеру 4 также подключены датчик 7 измерения направления перемещения (компас или гироскоп), датчик 8 пройденного пути (одометр), исполнительный механизм 9, управляющий манипулятором 10 (фиг. 1, фиг. 2) с установленной на нем видеокамерой 2 высокого разрешения, датчики определения характера (типа) мусора 11 (фиг. 1), ультразвуковой локационный датчик 12, датчик 13 горизонтального уровня, регулируемая подвеска 14 транспортного средства (с пневмо- или гидроприводом) и устройство 15 (фиг. 1, фиг. 2) сигнализации (например, проблесковый фонарь и (или) сирена). Видеокамера 2 высокого разрешения оборудована первыми приводами 16 горизонтального и вертикального перемещения, ко вторым выходам которых подключена первая пара датчиков 17 горизонтального и вертикального углов поворота видеокамеры 2 высокого разрешения. Выходы датчиков 17 горизонтального и вертикального углов поворота и управляющие входы приводов 16 горизонтального и вертикального перемещения видеокамеры 2 высокого разрешения подключены к компьютеру 4, к которому также подключены дополнительные видеокамеры 18 через мультиплексор 19.
Из числа дополнительных видеокамер 18 две видеокамеры 18.1, 18.2 (фиг. 1, фиг. 2), установленные в передней части транспортного средства 1, образуют систему стереонаблюдения, для фиксации элементов мусора и инородных предметов, мешающих передвижению транспортного средства 1 по заданному маршруту, а одна управляемая видеокамера 18.3 кругового обзора, обеспечивающая «обучение» транспортного средства и его последующее движение по заданному маршруту, установлена в конце выносной штанги 20 (фиг. 2), закрепленной на крыше транспортного средства 1. Причем управление видеокамерой 18.3 осуществляется от компьютера 4 через вторые приводы 21 горизонтального и вертикального перемещения, ко вторым выходам которых подключена вторая пара датчиков 22 горизонтального и вертикального углов поворота, своими выходами подключенные к компьютеру 4.
На выносной штанге 20 (фиг. 2) также расположен манипулятор 10 с возможностью его вращения вокруг штанги, а на конце манипулятора расположен захват 23 (например, цанговый), видеокамера 2 высокого разрешения и датчики 11 (на фиг. 2 не показаны) характера (типа) мусора (датчик бумаги 11-1, датчик пластических масс 11-2, датчик стекла 11-3 и датчик металла 11-4).
К задней части транспортного средства закреплено прицепное средство 24 сбора мусора (фиг. 2) с четырьмя приемными бункерами 25 по типу мусора (бумага, пластик, стекло, металл). Все приемные бункеры снабжены датчиками 26 полной загрузки (на фиг. 2 не показаны), выходы которых подключены к компьютеру 4.
На командном пункте 27 находится компьютер 28 командного пункта, к которому подключен монитор 29 и радиостанция 30 командного пункта с антенной 31. Связь между антенной 6 транспортного средства и антенной 31 командного пункта осуществляется по радиоканалу связи 32.
Перед практическим применением системы раздельного сбора и транспортировки мусора проводят «подготовку» убираемой территории (фиг. 3) и «обучение» каждого транспортного средства для его автономного движения по заданному маршруту. С этой целью на карте-схеме убираемой территории прокладывают траектории движения от точки А до точки В каждого транспортного средства системы раздельного сбора мусора и выбирают их количество (на фиг. 3 в качестве примера представлены шесть транспортных средств) с таким расчетом, чтобы обеспечить уборку всей территории. Далее оператор со своим компьютером поочередно подключается к компьютеру 4 каждого транспортного средства и уже на местности (управляя транспортным средством со своего компьютера) проводит транспортное средство по заданному маршруту (траектории), периодически (через определенные расстояния) останавливаясь и фиксируя с помощью управляемой видеокамеры кругового обзора 18.3 опорные объекты (деревья, фонари, скамейки и т.п.). Видеоизображения опорных объектов, фиксируемые компьютером 4 «обучаемого» транспортного средства через заданные расстояния и соответствующие им углы поворота ϕ, дают возможность вычислить и запомнить в памяти компьютера 4 траекторию движения, по которой «обученное» транспортное средство в дальнейшем будет осуществлять самостоятельное движение.
В процессе движения транспортного средства по заданной траектории камеры 18.1, 18.2 стереонаблюдения фиксируют на убираемом участке находящийся там мусор и при его обнаружении компьютер 4 с помощью исполнительного механизма 9 приводит в действие манипулятор 10, а с помощью приводов 16 горизонтального и вертикального поворота наводит видеокамеру 2 высокого разрешения на обнаруженный элемент мусора.
С помощью датчиков 11 характера (типа) мусора определяется тип мусора (бумага, пластик, стекло или металл), после чего манипулятор 10 с помощью захвата 23 по команде с компьютера 4 переносит обнаруженный элемент мусора в соответствующий данному типу мусора приемный бункер 25.
При переполнении того или иного приемного бункера сигнал с установленного в нем датчика 26 полной загрузки поступает на компьютер 4, который включает устройство сигнализации 15 и подает сигнал оповещения диспетчеру на командный пункт 27 по радиоканалу 32 для замены данного приемного бункера.
В случае возникновения неопределенности при определении типа мусора компьютер 4 посредством радиостанций 5 и 30 передает на командный пункт 27 изображение с телекамеры 2 для отображения на мониторе 29 возникшей ситуации и принятия решения дежурным диспетчером.
При появлении на пути следования транспортного средства посторонних непреодолимых предметов они последовательно обнаруживаются стереокамерами 18.1, 18.2 и идентифицируются как непреодолимые ультразвуковым локационным датчиком 12. Транспортное средство обходит эти предметы и, ориентируясь по ранее отмеченным опорным точкам, вновь выходит на заданную траекторию движения.
При движении транспортного средства по неровной поверхности датчик 13 горизонтального уровня фиксирует отклонение платформы транспортного средства от горизонтального уровня и, по команде с компьютера 4 включаются пневмо- или гидроприводы регулируемой подвески 14 для выравнивания транспортного средства с целью исключения его опрокидывания.
Введение манипуляторов с датчиками характера (типа) мусора в транспортные средства известной системы позволяет всем транспортным средствам, входящим в систему, в процессе их движения по заданным маршрутам (траекториям) подбирать обнаруженные элементы мусора и складировать их в соответствующие приемные бункеры прицепных средств сбора мусора в любое время суток и при любой погоде, что расширяет функциональные возможности системы, а отсутствие необходимости в участии людей (уборщиков, дворников) в сборе мусора дает дополнительный экономический эффект от использования заявляемой системы на практике.
Система обладает конструктивным и функциональным единством всех ее элементов, обеспечивая очистку от мусора многочисленные пешеходные дорожки в лесопарковых зонах, скверах и парках.
Литература
1. Патент RU 71971 U1 на полезную модель (аналог). Мусоровоз. Опубликовано: 27.03.2008.
2. Патент RU 2230015 С1 на изобретение (аналог). Система обращения с твердыми отходами потребления. Опубликовано 10.06.2004.
3. Патент RU 113395 U1 на полезную модель (прототип). Система видеонаблюдения с транспортного средства, находящегося в движении. Опубликовано 10.02.2012 г.
Реферат
В системе сбор мусора осуществляют несколько транспортных средств (ТС), оборудованных прицепными средствами 24 сбора мусора, движущимися по заданным траекториям. Каждое ТС оборудовано видеокамерой 2, расположенной в зоне захвата 23 манипулятора 10, подключенной через плату видеоввода 3 к компьютеру 4, имеющему радиостанцию 5, посредством которой осуществляется радиосвязь с радиостанцией 30, компьютером 28 и монитором 29 командного пункта 27. На ТС установлены и подключены к компьютеру 4 дополнительные видеокамеры 18 с мультиплексором 19, датчик 7 измерения направления перемещения, датчик 8 пройденного пути, исполнительный механизм 9, своим выходом подключенный к манипулятору 10, датчики 11 характера типа мусора, ультразвуковой локационный датчик 12, датчик 13 горизонтального уровня, регулируемая подвеска 14 ТС, устройство 15 сигнализации, первая пара датчиков 17 горизонтального и вертикального углов поворота видеокамеры 2 и первые приводы 16 горизонтального и вертикального перемещения видеокамеры 2, подключенные к входам первой пары датчиков 17 горизонтального и вертикального углов поворота. Одна из дополнительных видеокамер 18 оборудована вторыми приводами 21 горизонтального и вертикального перемещения, управляющие входы которых соединены с компьютером 4, а вторые выходы подключены к соответствующим входам второй пары датчиков 22 горизонтального и вертикального углов поворота, своими выходами подключенные к компьютеру 4. Две оставшиеся образуют систему стереонаблюдения. Система обеспечивает повышение производительности путем уменьшения участия пользователя. 3 ил.
Комментарии