Система помощи оператору в приложении усилий - RU2747404C1
Код документа: RU2747404C1
Чертежи













Описание
Область техники, к которой относится изобретение
Система относится к области пассивных вспомогательных экзоскелетов, предназначенных для снижения физических усилий операторов.
Уровень техники
Настоящее изобретение относится к системе, позволяющей оператору снизить прикладываемые усилия, содержащей предмет экипировки, который может быть надет оператором и который выполнен с возможностью при ношении входить в зацепление с подвижными относительно друг друга частями сустава оператора, и определяет по меньшей мере одну ось вращения для принятия положения, соответствующего положению сустава оператора; изобретение также относится к устройству, расположенному на предмете экипировки и способному компенсировать моменты сопротивления, действующие на сустав при усилии, прикладываемом оператором.
Устройство такого типа описано в патентном документе WO 2012/099995A2.
Известная система такого типа предназначена для создания вертикальной опоры для рук оператора, помогающей оператору при выполнении задач с поднятыми руками.
Для этого система в соответствии с изобретением содержит опору для рук и соединенные с ней упругие средства, частично компенсирующие силу тяжести, действующую на руки оператора. Система содержит шарнирные сочленения, соединяющие опоры для рук с ремнями, надетыми на туловище оператора, обеспечивая - хотя и ограниченно - свободу движений рук, а более конкретно плечевых суставов.
Раскрытие сущности изобретения
Варианты осуществления описанной системы относятся к пассивному экзоскелету, снижающему нагрузку на суставы, например, на плечевой сустав, и обеспечивающему вспомогательное усилие. Задачей настоящего изобретения является обеспечение решения, улучшенного по сравнению с описанным в предшествующем уровне техники, в частности с точки зрения эргономики и удобства использования.
Более конкретно, система в соответствии с различными вариантами осуществления изобретения основана на принципе пассивного вспомогательного экзоскелета, содержащего упругий механизм, предназначенный для создания крутящего момента, пропорционального углу подъема сустава, например сустава руки оператора. В соответствии с такими вариантами осуществления, упругий механизм выполнен с возможностью изменения расстояния между двумя его концами для предварительного натяжения этого упругого механизма до значения, выбранного из множества предварительно заданных значений натяжения, и, как следствие, изменения уровня помощи, обеспечиваемой экзоскелетом. Например, упругий механизм может быть пружинным упругим механизмом и содержать по меньшей мере один упругий пружинный элемент.
В соответствии с одним из вариантов осуществления, система помощи оператору в приложении усилий содержит предмет экипировки, который может быть надет оператором и который при ношении входит в зацепление с подвижными относительно друг друга частями сустава оператора, и содержит подвижную раму, определяющую по меньшей мере одну ось вращения, которая принимает положение, соответствующее положению сустава оператора; и компенсационное устройство, установленное на предмете экипировки и приводимое в действие для компенсации моментов сопротивления, действующих на сустав при приложении усилия.
Компенсационное устройство содержит первый поворотный элемент и второй поворотный элемент, соединенные друг с другом и приводимые в движение относительно друг друга вокруг первой оси вращения вследствие движения сустава оператора, причем второй поворотный элемент может поворачиваться вокруг второй оси вращения; и упругий механизм, содержащий по меньшей мере один упругий элемент, выполненный с возможностью воздействия на второй поворотный элемент для приложения к первой оси вращения момента, противоположного моментам сопротивления. Первый и второй поворотные элементы и упругий механизм предварительно отрегулированы относительно друг друга таким образом, чтобы по меньшей мере в одном заданном положении сочленения сила, прикладываемая упругим механизмом ко второму поворотному элементу, была ориентирована под углом ко второй оси вращения второго поворотного элемента.
Подвижная рама может содержать первую и вторую части, выполненные с возможностью перемещения относительно друг друга вокруг первой оси вращения.
Первый поворотный элемент может представлять собой зубчатое колесо, жестко соединенное с первой частью и выровненное относительно первой оси вращения. Второй поворотный элемент представляет собой зубчатое колесо, жестко соединенное со второй частью и выполненное с возможностью поворота вокруг второй оси вращения и перемещения в соответствии с вращательным движением вокруг оси вращения. Упругий механизм входит в зацепление со вторым поворотным элементом, прикладывая продольную силу к эксцентричной точке второго поворотного элемента.
В системе в соответствии с другим вариантом осуществления компенсационное устройство может содержать эпициклическую зубчатую передачу, установленную на первой оси вращения и предварительно отрегулированную таким образом, что коронная шестерня зубчатой передачи жестко соединена со второй частью, а центральная шестерня зубчатой передачи жестко соединена с первой частью, или наоборот. Коронная шестерня или зубчатая шестерня определяет первое зубчатое колесо или третье зубчатое колесо. Второй поворотный элемент может содержать водило планетарной передачи. Упругий узел входит в зацепление с водилом планетарной передачи, прикладывая продольную силу к его эксцентричной точке.
Упругий механизм может содержать группу пружин таким образом, чтобы второй его конец мог регулироваться для задания его предварительного натяжения. Группа пружин может быть соединена с первым и вторым кронштейнами, причем первый кронштейн соединен с эксцентричной точкой второго поворотного элемента, а второй кронштейн соединен со второй частью.
Устройство регулирования натяжения может быть соединено с упругим механизмом и выполнено с возможностью регулирования его натяжения. Устройство регулирования натяжения может быть выполнено с возможностью предварительного натяжения упругого механизма с множеством дискретных настроек натяжения и установки предварительно заданного натяжения с одной из множества дискретных настроек натяжения. Устройство регулирования натяжения может содержать кулачковый механизм для регулирования упругого механизма с множеством дискретных настроек натяжения. Устройство регулирования натяжения может содержать интерфейсный механизм, позволяющий оператору избирательно регулировать компенсационное устройство.
Система может быть предназначена для плечевого сустава оператора, причем предварительно заданное положение соответствует положению, когда рука вытянута вдоль тела оператора. Первый и второй поворотные элементы могут определять коэффициент передачи движения, поскольку упругий механизм устанавливает на первой оси вращения максимальный момент при положении руки, вытянутой вперед под углом в 90°. Первый и второй поворотные элементы могут иметь коэффициент передачи движения, являющийся функцией угла поворота вокруг первой оси вращения.
Предмет экипировки может содержать часть, предназначенную для вхождения в зацепление с туловищем оператора и содержит опору качения, по которой скользит крейцкопфный узел; первый шарнирный элемент, соединенный с крейцкопфным узлом с возможностью поворота вокруг по меньшей мере одной второй оси вращения; и второй шарнирный элемент, соединенный с первым элементом с возможностью поворота вокруг первой оси вращения. Первый шарнирный элемент может быть соединен с крейцкопфным узлом через сочленение с двумя степенями свободы, определяющее вторую и третью оси вращения, перпендикулярные друг другу.
Система может быть приспособлена к тазобедренному суставу оператора, в случае чего предварительно заданное положение соответствует вертикальному положению оператора.
Краткое описание чертежей
Другие отличительные характеристики и преимущества настоящего изобретения станут ясны из описания, которое будет приведено ниже со ссылками на прилагаемые чертежи, представленные исключительно в качестве неограничивающего примера.
На фиг.1 представлен вид спереди в аксонометрии системы в соответствии с одним из вариантов осуществления, надетой на оператора.
На фиг.2 представлен вид сбоку системы по фиг.1.
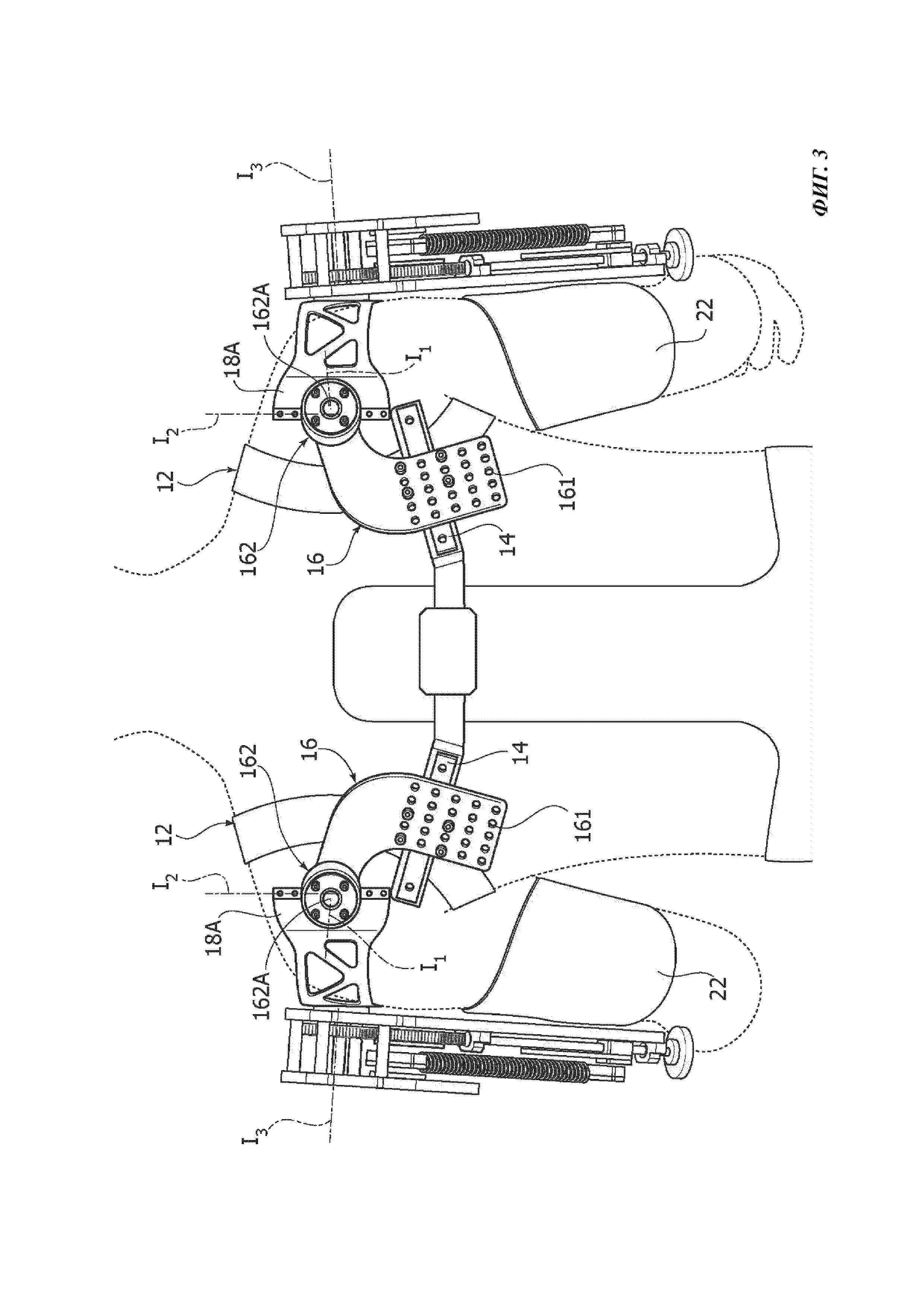
На фиг.3 представлен вид сзади системы по фиг.1.
На фиг.4 представлен вид в плане сверху системы по фиг.1.
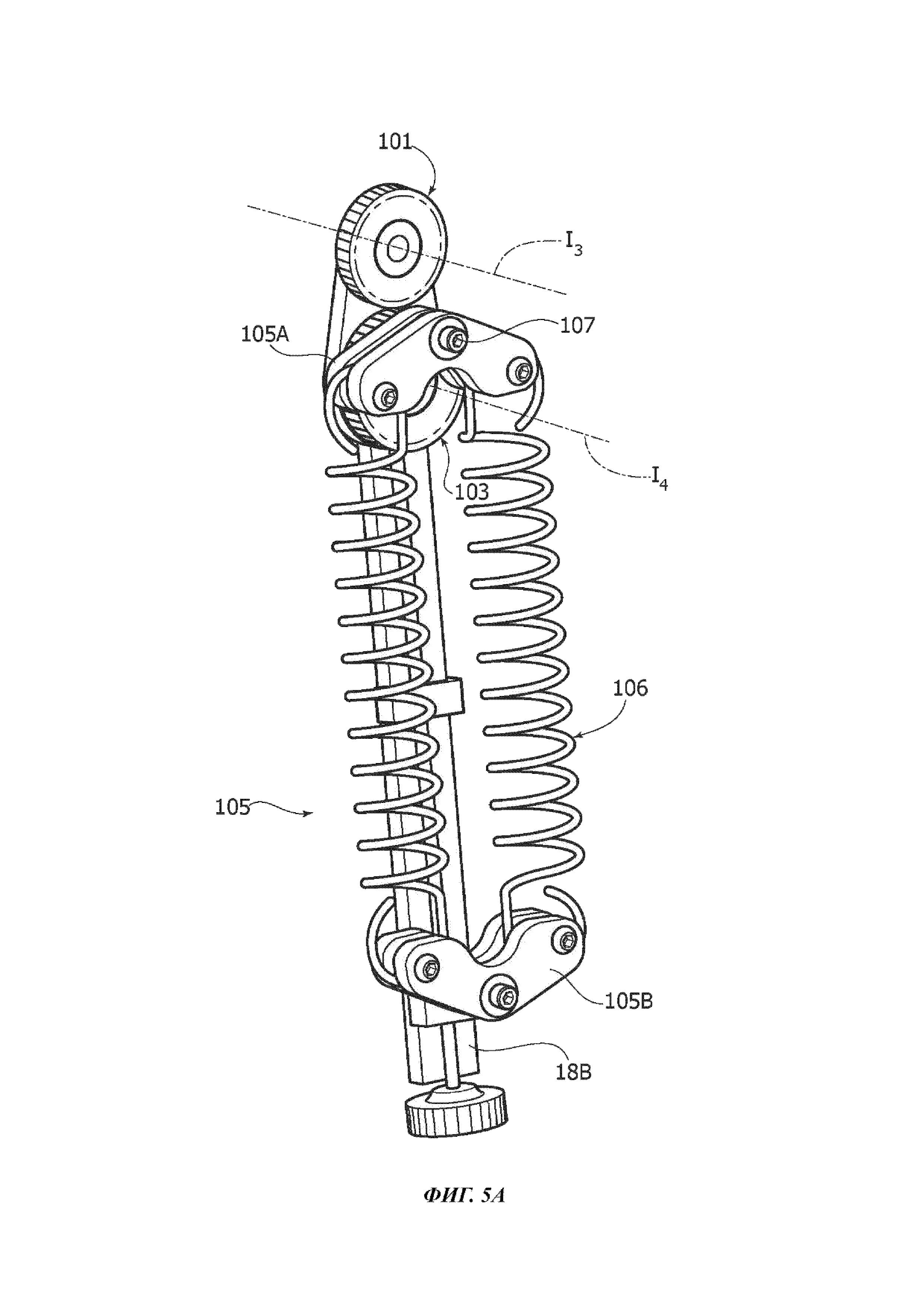
На фиг.5А представлен вид в аксонометрии изнутри компенсационного устройства системы по фиг.1 в соответствии с первым вариантом осуществления.
На фиг.5В представлен вид в аксонометрии изнутри компенсационного устройства системы по фиг.1 в соответствии с другим вариантом осуществления.
На фиг.6А-6С представлены графики, демонстрирующие примеры работы описанного компенсационного устройства.
На фиг.7 представлены различные примеры кривых вспомогательного крутящего момента, который может быть обеспечен системой.
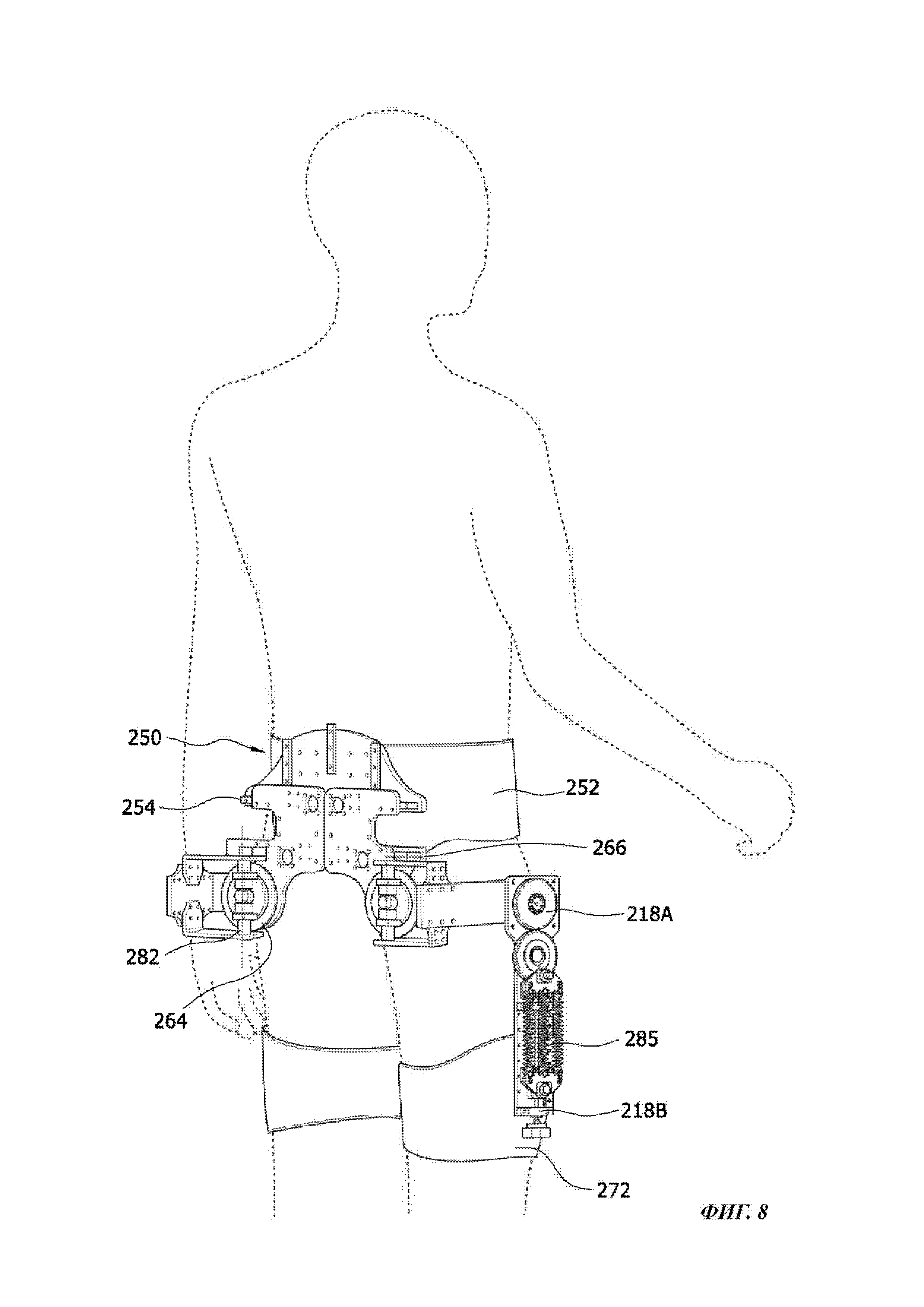
На фиг.8 представлен вид в перспективе системы в соответствии с одним из вариантов осуществления, описанной здесь для применения с тазобедренным суставом.
На фиг.9 представлен вид в перспективе системы в соответствии с одним из вариантов осуществления, описанной здесь для применения с коленным суставом.
На фиг.10 представлен вид изнутри компенсационного устройства по фиг.1 в соответствии с еще одним вариантом осуществления.
На фиг.11 представлен другой пример кривой вспомогательного момента, который может быть обеспечен системой.
На фиг.12 представлено компенсационное устройство в соответствии с другим вариантом осуществления для системы по фиг.1.
На фиг.13А представлено регулировочное устройство для компенсационного устройства по фиг.12.
На фиг.13В представлено регулировочное устройство по фиг.13А без измерительной шкалы и можно видеть кулачковый механизм.
На фиг.14А представлен кулачковый механизм по фиг.12 со штырем в положении равновесия.
На фиг.14В представлен кулачковый механизм по фиг.14А в переходном положении.
На фиг.15А представлен кулачковый механизм по фиг.14 в третьем положении.
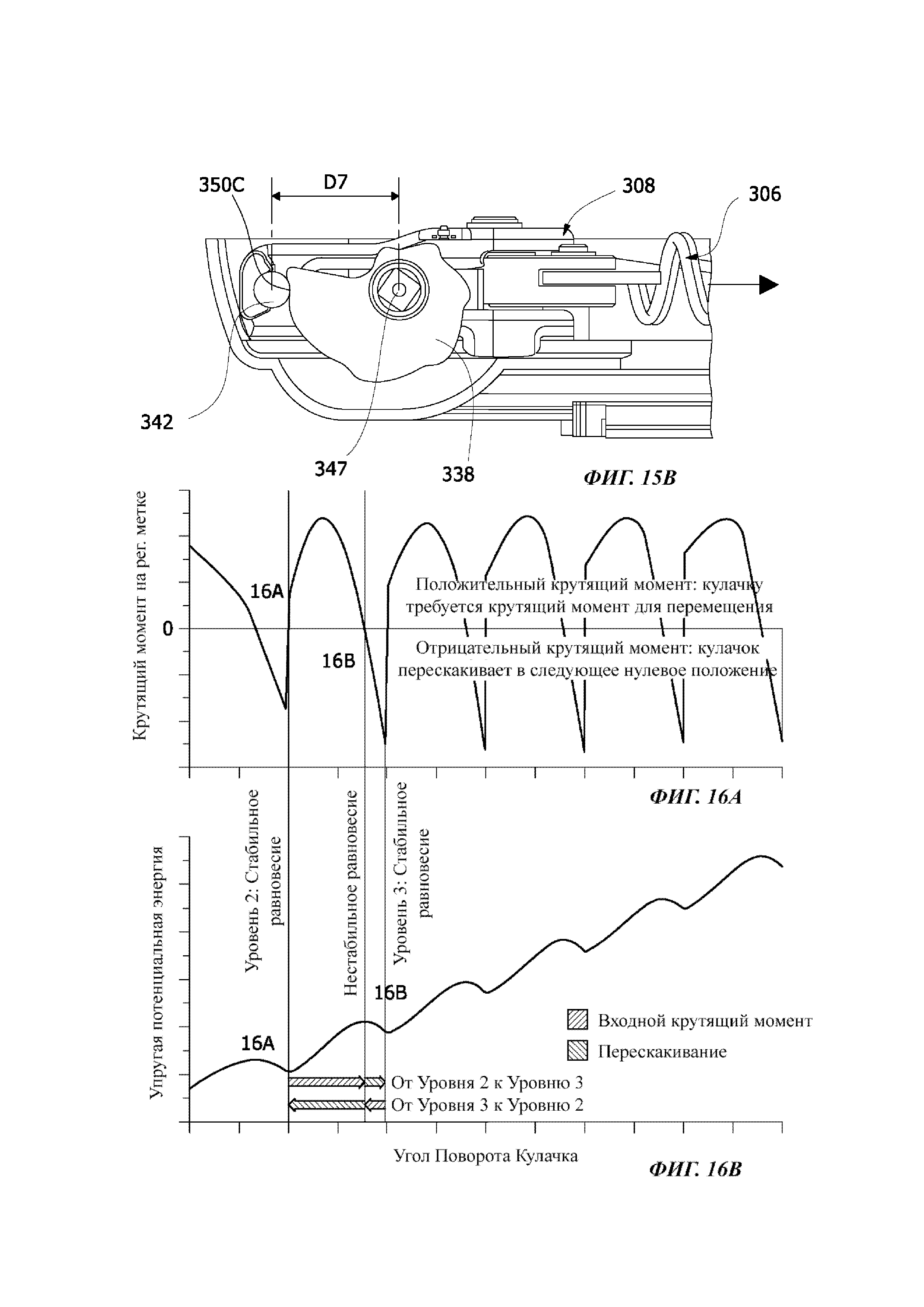
На фиг.15В представлен кулачковый механизм по фиг.14А в седьмом положении.
На фиг.16А представлен график, демонстрирующий зависимость крутящего момента в положении регулирования от угла поворота кулачка.
На фиг.16В представлен график, демонстрирующий зависимость упругой потенциальной энергии от угла поворота кулачка.
Осуществление изобретения
Лучше понять настоящее изобретение и различные варианты его осуществления позволит описание, которое будет приведено ниже со ссылками на прилагаемые чертежи, на которых сходные элементы обозначены сходными позициями.
Хотя в соответствии с настоящим изобретением может быть получено множество различных модификаций и альтернативных конструкций, ниже будут подробно описаны и представлены на чертежах некоторые иллюстративные варианты осуществления. Однако должно быть ясно, что настоящее изобретение не ограничивается отдельными описанными вариантами осуществления, а покрывает все модификации, альтернативные конструкции, сочетания и эквиваленты в пределах объема и сущности настоящего изобретения.
Использованные в настоящей заявке ссылки даны только для удобства и не определяют область защиты или объем настоящего изобретения.
Описанная система является системой помощи оператору в приложении усилий, содержащей:
- предмет экипировки, который может быть надет оператором, при ношении входящий в зацепление с подвижными относительно друг друга частями сустава оператора и определяющий по меньшей мере одну ось вращения для принятия положения, соответствующего положению сустава, и
- устройство, прикрепленное к предмету экипировки и предназначенное для компенсации моментов сопротивления, действующих на сустав оператора при приложении усилия.
Описанная в настоящей заявке система разработана для применения для помощи оператору в приложении усилий, относящихся к плечевому суставу. Как можно будет видеть из дальнейшего, те же самые принципы могут применяться также для систем, помогающих оператору в усилиях, затрагивающих другие группы суставов или другие суставы, такие как тазобедренный или коленный суставы.
Описанная в настоящей заявке система отличается тем, что компенсационное устройство содержит:
- первое зубчатое колесо и второе зубчатое колесо, соединенные друг с другом и приводимые в движение относительно друг друга вокруг упомянутой оси вращения вследствие движения сустава оператора, причем второе зубчатое колесо выполнено с возможностью вращения вокруг собственной оси, и
- узел, содержащий один или более упругих элементов, предварительно отрегулированный для воздействия на второе зубчатое колесо таким образом, чтобы прикладывать к оси вращения момент, противоположный моментам сопротивления;
- причем первое и второе зубчатые колеса и указанный узел отрегулированы относительно друг друга таким образом, чтобы по меньшей мере в одном предварительно заданном положении сустава, сила, прикладываемая узлом ко второму элементу, была ориентирована под углом к оси вращения второго элемента.
В описанном выше предварительно заданном положении указанный узел не может прикладывать никакого компенсирующего момента к оси вращения системы.
Таким образом, описанное выше предварительно заданное положение соответствует нейтральному положению системы, в котором оператор не получает никакого импульса на сустав.
Предпочтительно, в применении к плечевому суставу вышеописанное нейтральное положение соответствует положению рук, вытянутых вдоль туловища. В применении к тазобедренному суставу нейтральное положение соответствует вертикальному положению оператора.
Заявитель обнаружил, что способность системы идентифицировать такое нейтральное положение является фундаментальным признаком, гарантирующим необходимое удобство для оператора и прежде всего для лиц, носящих систему, которые при этом должны выполнять ряд задач, не все из которых связаны, например, с поднятием рук.
Таким образом, система в соответствии с изобретением обеспечивает принадлежность, которую оператор может носить в течение всей смены с тем преимуществом, что он надевает ее только один раз, когда одевается в начале смены.
Опять же в отношении повышения удобства оператора, в соответствии с различными предпочтительными вариантами осуществления упругий механизм системы содержит систему регулирования предварительного натяжения упругого механизма, позволяющую оператору выбрать ту помощь, которая ему необходима, или, возможно, даже полностью отключить помощь, например, при продолжительных перерывах в работе.
Как станет понятно из различных предпочтительных вариантов осуществления, система в соответствии с изобретением содержит систему осей перемещения, которая может оказывать помощь практически при всех движениях сустава и возможной суставной группы или пояса, к которому принадлежит сустав, и точно и плавно следовать за этими движениями.
Было доказано, что эта система осей перемещения представляет собой вспомогательную систему, оптимальную с точки зрения эргономики, и дополнительно способствует удобству оператора.
Представленная на чертежах система 10 помощи оператору в приложении усилий в соответствии с проиллюстрированными вариантами осуществления предназначена в особенности для помощи оператору в приложении усилий, касающихся плечевого сустава.
Система 10 содержит предмет 12 экипировки, который может носить оператор и который представляет собой предмет одежды. В соответствии с вариантом осуществления по фиг.1-4 предмет 12 экипировки имеет вид куртки и надевается соответствующим образом.
Предпочтительно, предмет 12 экипировки изготовлен из натуральной или синтетической ткани и может иметь подкладку в некоторых областях, например в области трапециевидной мышцы, рук и/или боков оператора. Кроме того, предмет 12 одежды предпочтительно охватывает жесткие или полужесткие элементы (например, пластины или планки), которые контактируют с телом оператора, и поэтому имеют форму, соответствующую форме области тела оператора, с которой они контактируют. Функция этих жестких или полужестких элементов состоит в снятии сил, возникающих на ассистируемой оси на отдельных частях тела оператора, таких как плечи и таз, и распределении этих сил для предотвращения избыточных давлений, которые могут причинять затруднения.
К предмету 12 экипировки прикреплена подвижная рама, предназначенная для определения ассистируемой оси вращения системы 10 и обеспечения дополнительных степеней свободы, чтобы следовать движениям оператора, обеспеченным плечевым поясом, или в большей степени суставом, к которому приложена система 10.
В соответствии с различными предпочтительными вариантами осуществления, подобными представленным на фиг.1-4, на задней стороне предмета 12 экипировки, на лопатках, расположена пара опор 14 качения, предпочтительно ориентированных под углом к фронтальной плоскости оператора и наклоненных таким образом, что они расходятся вперед в противоположные стороны и вверх относительно горизонтальной плоскости, причем эти опоры по существу следуют плоскости подостной мышцы лопатки. Такие опоры 14 качения определяют соответствующие оси Y1 и Y2 степеней подвижности по поступательному движению. На каждой из опор 14 качения установлен с возможностью перемещения крейцкопфный узел 16, содержащий L-образный опорный кронштейн 161, лежащий в той же плоскости, что и соответствующая ему опора 14 качения, и содержащий на своем конце сочленение 162, имеющее две степени свободы, причем этот опорный кронштейн 161 определяет первую ось 11 вращения и вторую ось 12 вращения, перпендикулярные друг другу.
Кронштейн 161 имеет такую форму, что сочленение 162 установлено в положение, по существу соответствующее задней части плеча оператора.
Сочленение 162 соединяет опорный кронштейн 161 с двумя шарнирно соединенными элементами 18А и 18В, определяя ассистируемую ось 13 вращения системы 10 в соответствии с изобретением.
Первый элемент 18А непосредственно соединен с сочленением 162, относительно которого он может поворачиваться вокруг первой и второй осей 11, 12.
В соответствии с различными предпочтительными вариантами осуществления, подобными представленному на чертежах, соединение 162 содержит кольцевой корпус, установленный с возможностью вращения на первый штырь 162А, определяющий первую ось 11, и содержит два противоположных радиальных штыря 162В, определяющих вторую ось 12. Первый штырь 162А жестко закреплен на кронштейне 161, тогда как элемент 18А установлен с возможностью вращения на двух штифтах 162В.
В соответствии с различными предпочтительными вариантами осуществления, соединение 162 установлено в положение, соответствующее плечевому суставу оператора.
Более предпочтительно, сочленение 162 установлено так, что первая ось 11 проходит приблизительно перпендикулярно фронтальной плоскости оператора таким образом, что поворот элемента 18А вокруг первой оси 11 по существу соответствует движению отведения/приведения руки оператора. Вторая ось 12 расположена так, что поворот элемента 18А вокруг этой оси по существу соответствует повороту плеча. Элемент 18А выступает в виде консоли от сочленения 162, следуя криволинейному профилю таким образом, что его конец 182 устанавливается напротив сочленения в положении, соответствующем латеральной части плеча оператора. С концом 182, вокруг оси 13 вращения, шарнирно соединен элемент 18В, жестко прикрепленный к ленте 22, надеваемой на руку оператора. Ось 13 - в положении покоя, представленном на чертежах, - представляет собой по существу горизонтальную ось во фронтальной плоскости оператора. Всякое поворотное движение руки оператора с компонентом в сагиттальной плоскости (перпендикулярной фронтальной плоскости) определяет поворот элемента 18В относительно элемента 18А вокруг оси 13 вращения.
Ось 13 вращения составляет «ассистируемую» ось системы, на которой система генерирует крутящий момент, увеличивающий усилия, прикладываемые оператором. Учитывая ориентацию оси 13, полученная помощь может быть приложена относительно движения в передней проекции (или проекции вперед) руки или движения в противоположном направлении. Устройство, которое может генерировать это ассистирующее действие, имеет общую конструкцию, содержащую:
- первое зубчатое колесо и второе зубчатое колесо, соединенные и приводимые в движение относительно друг друга вокруг «ассистируемой» оси вращения вследствие движения сустава оператора, причем второе зубчатое колесо может поворачиваться вокруг собственной оси, и
- узел, содержащий один или более упругих механизмов, предварительно отрегулированный с возможностью воздействия на второе зубчатое колесо, прикладывая к «ассистируемой» оси вращения момент, противоположный моментам сопротивления,
- причем первое и второе зубчатые колеса и «упругий» узел отрегулированы относительно друг друга таким образом, чтобы по меньшей мере в одном заданном положении сочленения сила, приложенная вышеуказанным узлом ко второму элементу, была ориентирована под углом ко второму элементу относительно оси вращения.
На фиг.5А и 5В представлено это устройство в соответствии с двумя вариантами осуществления.
На фиг.5А представлено компенсационное устройство, содержащее первый поворотный элемент 101, такой как первое зубчатое колесо, расположенный на конце 182 элемента 18А, жестко соединенный с этим концом и имеющий собственную ось, выровненную относительно оси 13 вращения. Второй поворотный элемент 103, такой как второе зубчатое колесо, соединен с элементом 18В с возможностью поворота вокруг собственной оси 14, параллельной оси 13 вращения, и расположен таким образом, что это второе зубчатое колесо входит в зацепление с первым зубчатым колесом 101. Таким образом, при работе поворот элемента 18В вокруг оси вращения 13 определяет вращательное движение второго зубчатого колеса 103 вокруг собственной оси 14 и вращательное движение первого зубчатого колеса вокруг собственной оси вращения 13.
Компенсационное устройство дополнительно содержит упругий механизм 105, предпочтительно содержащий множество упругих механизмов, прикладывающий продольную упругую силу к эксцентричной точке второго зубчатого колеса 103. В соответствии с различными предпочтительными вариантами осуществления, подобными представленному на чертеже, узел 105 содержит два противоположных кронштейна 105А и 105В, первый из которых прикреплен ко второй шестерне 103 в точке 107 крепления в положении вне центра, а последний расположен вблизи элемента 18 В. С двумя кронштейнами 105А, 105В соединены соответствующие противоположные концы упругого элемента упругого механизма 105, которые могут быть группой цилиндрических пружин, работающих на растяжение. Общее действие этих пружин определяет продольную результирующую силу F, приложенную к точке 107 крепления (см. фиг.6А-6С). В качестве альтернативы цилиндрическим пружинам, устройство может содержать упругие элементы какого-либо другого типа, например, один или более элементов, изготовленных из эластомерного материала, основным преимуществом которых является малый вес.
Следует заметить, что и амплитуда силы F, и ее вектор в точке 107 крепления являются функциями угла поворота второй шестерни 103 вокруг собственной оси 14 и, следовательно, в предельном расчете функциями угла поворота элемента 18В вокруг оси 13 вращения; на чертежах этот угол обозначен позицией 9 (фиг.2).
Для каждого углового положения значение силы и тангенциальный компонент Ft ее вектора будут определять степень ассистирования, обеспеченного компенсационным устройством для перемещения руки вперед.
На фиг.6А-6С схематично представлено изменение вышеуказанных параметров при изменении угла поворота.
В свете вышеизложенного, специалисту в данной области техники должно быть ясно, что путем выбора передаточного отношения между первым и вторым зубчатыми колесами 101, 103 можно установить разные кривые ассистирования.
На фиг.7 представлены различные примеры кривой ассистирующего крутящего момента, являющегося функцией угла поворота, который может быть обеспечен системой 10 для разных передаточных отношений зубчатой передачи компенсационного устройства.
Как можно видеть на фиг.7, при повышении передаточного отношения максимум кривой смещается к углам поворота большей величины.
Можно также предусмотреть использование некруглых зубчатых колес с переменными передаточными отношениями для изменения профиля кривой ассистирования для получения заданных уровней эффективности. В соответствии с различными вариантами осуществления, может быть предусмотрен коэффициент передачи движения, который увеличивается по мере увеличения угла поворота для обеспечения, по сравнению с вариантами осуществления с постоянным передаточным отношением, уменьшения ассистирующего крутящего момента для малых углов (близких к нулю) и, напротив, увеличения ассистирующего крутящего момента там, где расположен максимум кривой. На фиг.11 представлена кривая ассистирования С, полученная от компенсационного устройства, содержащего зубчатые колеса с увеличивающимся передаточным отношением, и кривая ассистирования С", полученная от устройства, содержащего упругие средства, которые могут определять ту же упругую силу, но содержат зубчатую передачу с постоянным передаточным отношением. На фиг.10 представлен пример такого устройства, содержащего зубчатые колеса с увеличивающимся передаточным отношением. Некруглое зубчатое колесо 291 входит в зацепление со вторым зубчатым колесом 292, обеспечивая вследствие своей некруглой формы переменный коэффициент передачи движения. Первый и второй противоположные кронштейны 293А, 293В определяют между собой упругий механизм 294, аналогичный предыдущим вариантам осуществления, причем первый кронштейн 293А соединен со вторым зубчатым колесом 292 в точке 297 крепления.
Система может быть легко предварительно отрегулирована для определения заданных кривых, оптимизированных для конкретных требований в конкретных случаях применения.
В отношении усиления при движении в передней проекции руки система подходит для обеспечения наилучшего ассистирования, если максимальный доступный крутящий момент обеспечивается при угле поворота в 90°, поскольку это является наиболее неблагоприятным условием в отношении момента силы тяжести, действующего на саму руку.
Как уже было сказано, система предварительно регулируется таким образом, чтобы полученный ассистирующий крутящий момент был равен нулю по меньшей мере одном предварительно заданном положении, т.е. положении, представляющем собой нейтральное положение системы. В соответствии с проиллюстрированным вариантом осуществления, это нейтральное положение соответствует положению, в котором угол 9 вращения равен нулю, как можно видеть на фиг.7, где представленная кривая имеет нулевое значение ассистирующего крутящего момента для угла 9 равного 0°.
На фиг.6А, где представлено компенсационное устройство в нейтральном положении, можно видеть, что для этого положения упругая сила, приложенная упругим механизмом 105 к зубчатому колесу 103, ориентирована под углом к оси вращения самой шестерни 103. Между прочим, следует также заметить, что при этом условии, направление, соединяющее два центра шестерен 101, 103, и направление вектора упругой силы сдвинуты относительно друг друга.
Опять же, чтобы сделать систему пригодной для разных случаев применения, и, кроме того, универсальной, в соответствии с различными вариантами осуществления, подобными представленному на чертежах, упругий механизм 105 предварительно регулируется таким образом, чтобы положение кронштейна 105 В относительно противоположного кронштейна 105А могло регулироваться таким образом, чтобы обеспечить оператору возможность установки предварительного натяжения пружин. В упругом механизме 105 с этой целью предусмотрено регулировочное устройство с винтовым приводом, которое может приводиться в действие либо вручную, как в соответствии с представленным вариантом осуществления, с помощью ручки, либо иметь электромеханическое управление с помощью одного или более исполнительных механизмов, которые могут приводиться в действие с помощью нажимной кнопки, причем последняя предпочтительно установлена в месте, до которого легко может дотянуться оператор, даже носящий систему. Возможность регулирования позволяет оператору установить желаемый уровень усиления и, возможно, полностью отключить его.
На фиг.5В представлено компенсационное устройство, отличающееся тем, что содержит не просто зубчатую передачу с двумя соединенными элементами, а эпициклическую зубчатую передачу, расположенную на оси 13 вращения.
В соответствии с предпочтительными вариантами осуществления, подобными представленному на чертеже, центральная или солнечная шестерня 201 зубчатой передачи жестко соединена с концом 182 элемента 18А, причем его собственная ось выровнена относительно оси 13. Коронная шестерня 203 жестко соединена с элементом 18В соосно с зубчатым колесом 201, с возможностью поворота вокруг оси 13.
Водило 204 планетарной передачи установлено на зубчатом 201 колесе с возможностью поворота вокруг оси 13, причем на конце его плеч расположена планетарная передача 206.
При работе поворот элемент 18В вокруг оси поворота 13 определяет поворот коронной шестерни 203 и водила 204 планетарной передачи вокруг оси 13 и совместное поворотное и вращательное перемещение планетной передачи 206 вокруг собственной оси поворота и вокруг оси 13.
В соответствии с этим вариантом осуществления, упругий механизм 105 предварительно отрегулирован таким образом, чтобы прикладывать продольную упругую силу к эксцентричной точке 207 водила 204 планетарной передачи; его кронштейн 105А закреплен на одном из плеч последнего.
По сравнению с компенсационным устройством по фиг.5А, описанное выше устройство отличается тем, что имеет меньшие размеры и меньший вес, обеспечивая при этом те же уровни эффективности и те же структурные параметры.
Принцип работы этого устройства тот же, что и устройства, описанного выше в связи с фиг.5А.
Кроме того, амплитуда упругой силы, созданной упругим механизмом 105, и ее вектор на точке 207 приложения изменяется как функция угла поворота зубчатого колеса 203 вокруг оси поворота 13 и, следовательно, как функция угла поворота.
Для каждого из угловых положений значение указанной силы и тангенциального компонента Ft ее вектора определяют величину ассистирования, обеспеченную устройством относительно движения руки в передней проекции.
Кроме того, также в соответствии с этим вариантом осуществления, устройство предварительно регулируется таким образом, чтобы обеспеченный вспомогательный крутящий момент был равен нулю по меньшей мере в одном нейтральном положении системы. Это будет соответствовать положению, в котором упругая сила, приложенная упругим механизмом 105 к водилу 204 планетарной зубчатой передачи, ориентирована под углом к оси 13 поворота.
Также, в отношении компенсационного устройства, содержащего эпициклическую зубчатую передачу, могут быть предусмотрены альтернативные варианты осуществления, в соответствии с которыми коронная шестерня 203 жестко соединена с элементом 18А, а центральная шестерня 201 - с элементом 18В, в конфигурации, противоположной представленной на чертеже.
Что же касается осей степеней подвижности Y1, Y2, 11 и 12 по поступательному движению, то система не прикладывает никакого ассистирующего крутящего момента вокруг этих осей, но благодаря этим осям она может следовать движениям сочленения из сагиттальной плоскости оператора. Таким образом, оператор не ограничен какой-либо конкретной позой или положением и может принимать любую позу, наиболее удобную для него при осуществлении задачи, и в выбранном положении получит необходимое усиление требуемого усилия, вокруг оси 13.
Следует также заметить, что опора 14 качения не только ассистирует возможным движениям плеча с компонентом, направленным вдоль осей Y1, Y2, но также позволяет системе приспособиться к телосложению оператора, причем крейцкопфные узлы 16 перемещаются друг от друга или друг к другу в зависимости от ширины плеч оператора. Предмет 12 экипировки может содержать крепежные элементы, такие как ремни, застежки крючок-петля и т.д., для регулирования экипировки по фигуре.
Как уже было сказано, изложенные принципы могут быть применены одинаково для системы помощи, предназначенной для использования с другими суставными группами или другими суставами, например, с тазобедренным или, альтернативно, с коленным суставом.
На фиг.8 представлен пример системы помощи для тазобедренного сустава. Здесь оказываемая помощь направлена на движение сгибания бедра относительно таза или также на движение сгибания туловища относительно таза в зависимости от работы, выполняемой оператором.
Описанное выше нейтральное положение соответствует в этом случае вертикальному положению оператора.
Оси степеней подвижности по поступательному движению этой системы и компенсационного устройства соответствуют осям степеней подвижности по поступательному движению системы, описанной выше, перенесенным на тазобедренный сустав.
Изменениям подвергся собственно предмет экипировки, носимый оператором, который в системе по фиг.8 состоит из пояса, охватывающего таз, на котором расположена опора 254 качения и два шарнирных элемента 218А, и двух лент 272, надеваемых на бедра, на которых закреплены два шарнирных элемента 218В. В частности, вариант осуществления по фиг.8 демонстрирует систему 250, содержащую предмет 252 экипировки и подвижную раму, содержащую сочленение 282, выполненное с возможностью приспосабливания к размерам и движениям оператора. Сочленение 282 содержит поворотный кольцевой корпус 264 соединенный с возможностью поворота с подвижной рамой и облегчающий приведение и отведение ног оператора. Система 250 дополнительно содержит стержень 266, облегчающий повороты бедра внутрь и наружу, таким образом обеспечивая две степени свободы, оси которых перпендикулярны друг другу, как и в соответствии с описанным выше вариантом осуществления.
Система 250 также содержит компенсационное устройство 285, содержащее упругий механизм, аналогичный описанному в ранее описанном варианте осуществления, и выполненный с возможностью помощи оператору в степенях сохранения вертикального положения.
На фиг.9 представлен пример вспомогательной системы 280 для коленного сустава. В этом случае надеваемый предмет экипировки содержит две ленты 260, 268, одна из которых носится на уровне бедра, а другая на уровне икры. Система 280 также содержит компенсационное устройство 290, помогающее оператору поддерживать желаемую степень сгибания и разгибания ноги.
На фиг.12 представлено компенсационное устройство 300 в соответствии с другим вариантом осуществления на основе пружинного механизме, создающего крутящий момент пропорциональный углу возвышения руки оператора, как и в предыдущих вариантах осуществления. Как и в соответствии с предыдущими вариантами осуществления, компенсационное устройство выполнено с возможностью обеспечения крутящего момента, пропорционального углу возвышения руки пользователя. Предпочтительно, этот вариант осуществления обеспечивает предварительно натянутую систему, позволяющую пользователю легко и быстро регулировать величину натяжения с помощью множества заданных положений.
В компенсационном устройстве по фиг.5А и 5В механизм 150 регулирования натяжения содержит интерфейсный механизм 152, такой как круговая шкала 152, выполненная с возможностью приведения в действие стержня или винтового механизма 154 для удлинения или укорочения второго кронштейна 105В относительно первого кронштейна 105А. Крепление 156 второго кронштейна 105В может соединяться со стержнем 154 с возможностью перемещения в соответствии с перемещением этого стержня 154 при регулировании круговой шкалы 152. Натяжение регулируется путем установки расстояния между двумя концами упругого механизма 105 с изменением расстояния между первым и вторым концами упругого механизма 105.
Компенсационное устройство 300 по фиг.12 содержит корпус 302, в котором расположены элементы компенсационного устройства 300. Эти элементы компенсационного устройства 300 включают поворотный узел 304, выполненный с возможностью соединения с шарнирным элементом 18А, упругий механизм 306, соединенный с узлом 304 зубчатой передачи, и устройство 308 регулирования натяжения, содержащее кулачковый узел 310, выполненный с возможностью изменения натяжения в упругом механизме 306, и соединенное с этим кулачковым узлом 310.
Узел 304 зубчатой передачи содержит первый поворотный элемент или плечевое зубчатое колесо 312, содержащее зацепляющую наружную окружность 313, которая входит в зацепление со вторым поворотным элементом или пружинным зубчатым колесом 314. Первый поворотный элемент 312 приводится в относительное перемещение вокруг оси поворота 13 при движении сустава тела оператора, причем второй поворотный элемент 314 может поворачиваться вокруг собственной оси.
Второй поворотный элемент 314 соединен первым кронштейном 318 с упругим механизмом 306. Упругий механизм 306, представленный на чертеже, содержит первый и второй упругие элементы 324, 326 в виде цилиндрических пружин и прикреплен к первому кронштейну 318 с помощью по меньшей мере одного первого крепления 320, 322. Упругий механизм 306 выполнен с возможностью приложения линейной силы к эксцентричной точке 323 на первом кронштейне 318.
Упругий механизм 306 соединен со вторым кронштейном 332 с помощью по меньшей мере одного второго крепления 328, 330. Второй кронштейн 332 соединен с регулировочным устройством 308, таким как центральное соединение 336 на крейцкопфе 334.
Кулачковый узел 310 содержит по меньшей мере один кулачок 338, 340, выполненный с возможностью избирательного зацепления с позиционным держателем 342, таким как штырь, проходящим от крейцкопфа 334. По меньшей мере один кулачок 338, 340 содержит поверхность 341, определяющие по меньшей мере две равновесных точки 350, определяющих предварительно заданные положения натяжения упругого механизма 306. Этот по меньшей мере один кулачок 338, 340 может определять первый и второй кулачки 338, 340, проходящие на первой и второй противоположных сторонах крейцкопфа 334 для вхождения в зацепление со штырем 342, который может также проходить от противоположных сторон крейцкопфа 334.
Как можно видеть на фиг.12 и 13В, кулачковый узел 310 содержит интерфейсный механизм 344, позволяющий пользователю регулировать натяжение эластичного механизма 306 путем регулирования положения кулачкового узла 310. Интерфейсный механизм 344 может содержать соединительную часть 346, прикрепленную к выступу 347, образующему по меньшей мере один кулачок 338, 340 или соединенному с этим кулачком. Интерфейсный механизм 344 может дополнительно определять отверстие 348, позволяющее ввести инструмент и регулировать кулачковый узел 310 путем поворота по меньшей мере одного кулачка 338, 340 в одно из предварительно заданных положений.
На фиг.13А представлен корпус 302 или иначе расположенный рядом интерфейсный механизм 344, содержащий шкалу 349, такую как регулировочная шкала, для обозначения предварительно заданных положений, обеспечиваемых кулачковым узлом 310. Отверстие 348 для ключа может использоваться в сочетании со стандартным шестигранным гаечным ключом или специальным инструментом для регулирования кулачкового узла 310.
На фиг.14А представлен первый кулачок 338, содержащий углубления 350A-350G, образующие равновесные точки, соответствующие разным уровням ассистирования для компенсационного устройства 300. И первый, и второй кулачки 338, 340 могут быть соединены друг с другом с возможностью поворота и одновременно регулироваться по оси для вхождения в зацепление со штырем 342 в одном соответствующем углублении. Каждое из углублений 350A-350G устанавливает одно из разных расстояний между осью А кулачка и штырем 342, как показывают радиальные линии 352A-352G, радиус каждой из которых отличается от радиуса другой, и, следовательно, устанавливает разные расстояния между двумя концами пружины, как можно измерить первым и вторым кронштейнами. Такое устройства приводит к изменению упругого механизма и обеспечивает разные уровни ассистирования экзоскелета.
На фиг.14А в общем показано, как натяжение в упругом механизме 306 прижимает штырь 342 к первому кулачку 338, и этот штырь 342 устанавливается в равновесии в первом углублении 350А кулачка. Поворот кулачкового узла 310 требует приложения внешнего крутящего момента для того, чтобы вытолкнуть штырь из углубления 350А. На фиг.14В показано, как крутящий момент прикладывается к кулачковому узлу 310 интерфейсным механизмом 344, который поворачивает кулачковый узел 310. Первый кулачок 338 поворачивается до тех пор, пока штырь 342 не достигнет верха регулировочного порога 352А. По мере поворота первого кулачка 338 штырь 342 начинает опускаться во второе углубление 350В. Крутящий момент уже не требуется. После того, как штырь 342 окажется во втором углублении, он уравновешивается и уже не будет поворачиваться до нового приложения внешнего крутящего момента.
Должно быть ясно, что крутящий момент должен быть приложен к интерфейсному механизму 344, чтобы вытолкнуть по меньшей мере один кулачок 338, 340 из точки 350 равновесия и позволить ему достичь другого равновесного положения в одной из других точек равновесия, как показано на фиг.16А и 16В. На фиг.15А представлен штырь 342, расположенный в третьем углублении 350С, с радиусом 354С от оси А. На фиг.15В представлен штырь 342, расположенный в седьмом углублении 350G, с радиусом 354G от оси А. Это происходит потому, что в каждом рабочем состоянии, при каждом из уровней регулирования, упругий механизм 306 всегда натянут, а при этом регулировочное устройство 308 всегда прижимается к кулачковому узлу 310, создавая профиль крутящего момента, отличающийся последовательностью впадин (точек равновесия/углубления) и возвышений (регулировочных порогов).
На фиг.16А представлен пример зависимости момента интерфейсного механизма от угла поворота кулачка. Точки выше момента 0 представляют положительный крутящий момент, необходимый для перемещения кулачкового механизма через регулирующий порог из точки равновесия (например, из точки 350А равновесия в точку 350В равновесия). Диаграмма ниже крутящего момента 0 представляет отрицательный крутящий момент, используемый для перемещения кулачкового механизма мимо регулирующего порога в следующую точку равновесия.
На фиг.16В приведен пример упругой потенциальной энергии из одной точки равновесия в соответствии с углом поворота кулачка в другую точку равновесия. Например, из точки 350А равновесия в точку 350 В равновесия.
Потенциальная энергия накапливается или расходуется при перемещении кулачка вверх или вниз по «возвышениям» между соседними стабильными точками равновесия/впадинами. При перемещении вверх или вниз (т.е. при накоплении или расходовании потенциальной энергии) кулачок сначала входит в зону, требующую приложения крутящего момента для преодоления местного минимума потенциальной энергии, а затем входит в зону, в которой кулачок может «прыгнуть» в соседнее положение, «скатившись» по склону в соседнюю стабильную точку равновесия/выемку.
Как можно видеть на фиг.16А-16В, это верно даже тогда, когда кулачок в сумме расходует потенциальную энергию: кулачок должен сначала преодолеть местный минимум потенциальной энергии путем достижения местного максимума или «возвышения» через приложение крутящего момента, а затем может «спрыгнуть», чтобы остановиться в соседней «впадине» с общей потерей потенциальной энергии. Первичный крутящий момент также необходим для перемещения кулачка в соседнее положение с чистым выигрышем потенциальной энергии: когда первичный крутящий момент перемещает кулачок к соседнему «возвышению», кулачок может затем спрыгнуть и остановиться в соседней «выемке» с более высокой потенциальной энергией, чем в предыдущей «выемке». Такое устройство является предпочтительным, поскольку требует преднамеренного выбора установки кулачка оператором, а не спонтанного или случайного переключения между установками.
Без ущерба для принципов настоящего изобретения, детали конструкции и различных вариантов осуществления могут изменяться, даже значительно, по сравнению с представленными неограничивающими примерами, без отклонения от сущности настоящего изобретения, ограниченными прилагаемой формулой изобретения.
Описанные в настоящей заявке варианты осуществления обеспечивают систему помощи оператору в приложении усилий, которая обеспечивает улучшенную эргономичность и простоту использования, в особенности за счет работы компенсационного устройства, для обеспечения регулируемых и дискретных величин крутящего момента для помощи оператору в осуществлении некоторых движений, требующих усилий.
Реферат
Изобретение относится к группе изобретений, включающей систему для компенсации прикладываемых оператором усилий (варианты) и способ регулирования натяжения в компенсационном устройстве, расположенном на предмете (12) экипировки, надеваемом оператором. Система содержит предмет (12) экипировки, который может быть надет оператором, причем предмет (12) экипировки при ношении входит в зацепление с подвижными относительно друг друга частями сустава оператора. Система позволяет определить по меньшей мере одну ось (13) вращения, которая принимает положение, соответствующее суставу оператора. Устройство, расположенное на предмете (12) экипировки, предназначено для приведения в действие таким образом, чтобы компенсировать моменты сопротивления изгибу, действующие на сустав оператора при приложении им усилия. Компенсационное устройство содержит поворотный узел, имеющий нейтральное положение и способный определить предварительно заданную кривую ассистирующего крутящего момента, который является функцией угла поворота сустава. Компенсационное устройство содержит устройство регулирования натяжения, позволяющее регулировать момент, полученный вокруг сустава оператора. Изобретение позволяет снизить нагрузку на суставы, например на плечевой сустав, и обеспечивает вспомогательное усилие. 3.н. и 15 з.п. ф-лы, 23 ил.
Комментарии