/77j - /. /// / - 77777/7 77//y / f f iV J / / fif
fuS.1
Изобретение относится к зажимным
устройствам для грузов в сочетании с подъемным механизмом и касается,
в частности, хватания и несения чувствительных к повышенным давлениям грузов.
Известно захватное устройство для грузов, чувствительных к повышенным давлениям, навешиваемое на грузоподъ-
емньш механизм, содержащее приводные от гидроцилиндра зажимные ш;еки и связывающую последние с подвеской к
грузоподъемному механизму шарнирно- рычажную систему (авторское свидетельство СССР №208231 , кл. В66С 1/44,
1966).
Однако указанное устройство не в полной мере обеспечивает сохранность
хрупких изделий.
Целью изобретения является повышение сохранности груза.
Указанная цель достигается тем, что в захватное устройство для грузов
, чз вствительных к-повышенным давлениям , навешиваемое на грузоподъем-
ньй механизм, содержащее приводные от гидроцилиндра зажимные щеки и связывающую
последние с подвеской к грузоподъемному механизму шарнирно-ры- систему, снабжено динамометрами
, один из которых для определения собственной массы груза размещен на
связанном с зажимньЕ ш рычагами гидро- цилиндре, а другой для определения
воздействующего непосредственно на груз усилия установлен на подвеске,
и индикатором вертикального проскаль- зьшания груза относительно щек, включающим
в себя установленный в одной из зажимных щек вертикальный .палец и фрикционно связанную с ним втулку
с микропереключателем, управляемым пальцем, подпружиненным относительно
втулки, причем динамометры и микровыключатели соединены с цепью управления
величиной давления в гидроцилиндре .
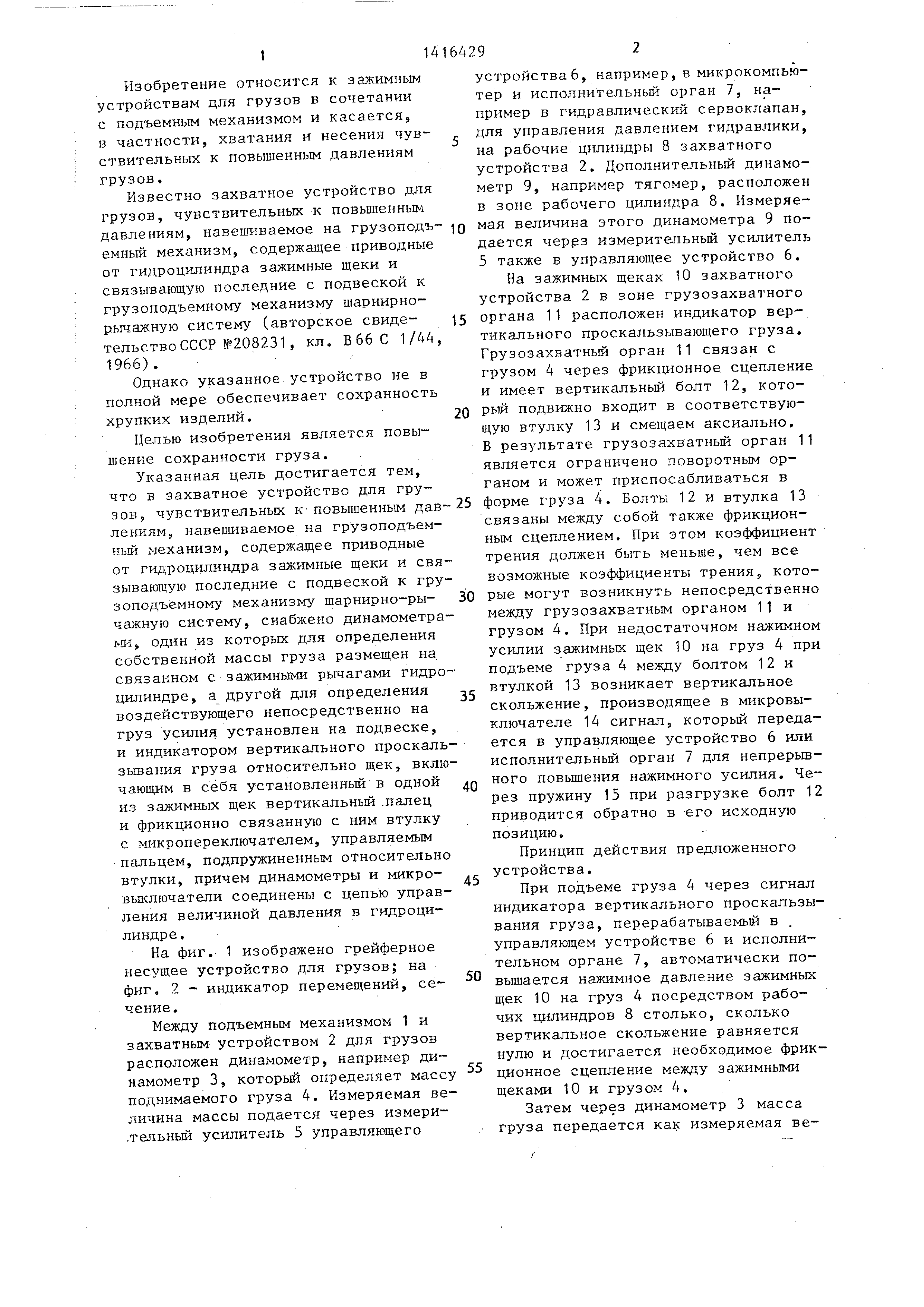
На фиг. 1 изображено грейферное
несущее устройство для грузов; на фиг. 2 - и -щикатор перемещений, сечение .
Между подъемным механизмом 1 и захватным устройством 2 для грузов
расположен динамометр, например динамометр 3, которьй определяет массу
поднимаемого груза 4. Измеряемая величина массы подается через измери- .тельньш усилитель 5 управляющего
164292
устройства6, например, в микрокомпьютер и исполнительный орган 7, например в гидравлический сервоклапан,
для управления давлением гидравлики, на рабочие цилиндры 8 захватного
устройства 2. Дополнительньм динамометр 9, например тягомер, расположен
в зоне рабочего цилиндра 8. Измеряе| Q мая величина этого динамометра 9 подается
черрз измерительный усилитель 5 также в управляющее устройство 6. На зажимных щеках 10 захватного
устройства 2 в зоне грузозахватного
15 органа 11 расположен индикатор вертикального
проскальзывающего груза. Грузозахватньм орган 11 связан с грузом 4 через фрикционное, сцепление
и имеет вертикальный болт 12, кото20 рьй подвижно входит в соответствующую
втулку 13 и смещаем аксиально. Б результате грузозахватный орган 11
является ограничено поворотным органом и может приспосабливаться в
25 форме груза 4. Болты 12 и втулка 13 связаны между собой также фрикционным
сцеплением. При этом коэффициент трения должен быть меньше, чем все
возможные коэффициенты трения, кото30 Рые могут возникнуть непосредственно
между грузозахватным органом 11 и грузом 4. При недостаточном нажимном
усилии зажимных щек 10 на груз 4 при подъеме груза 4 между болтом 12 и
втулкой 13 возникает вертикальное скольжение, производящее в микровыключателе
14 сигнал, который передается в управляющее устройство 6 или исполнительньй орган 7 для непрерьшjQ
ного повьш ения нажимного усилия. Через пружину 15 при разгрузке болт 12
приводится обратно в его исходную позицию.
Принцип действия предложенного
устройства.
При подъеме груза 4 через сигнал
индикатора вертикального проскальзывания груза, перерабатываемьй в
управляющем устройстве 6 и исполнительном органе 7, автоматически повышается
нажимное давление зажимных щек 10 на груз 4 посредством рабочих Ц1ШИНДРОВ В столько, сколько
вертикальное скольжение равняется нулю и достигается необходимое фрикционное
сцепление между зажимными щеками 10 и грузом 4.
Затем через динамометр 3 масса груза передается как измеряемая ве35
45
50
55
15.
/4

Комментарии