Устройство для терапии двигательной активности - RU2609994C2
Код документа: RU2609994C2
Чертежи
Описание
Настоящее изобретение относится к устройству для терапии двигательной активности, которое обеспечивает возможность приступить к восстановлению двигательной активности на ранней стадии процесса реабилитации пациента.
Для пациентов с неполностью парализованными нижними конечностями была показана возможность улучшения способности ходить, вплоть до нормальной, с помощью подходящих упражнений. Для этой цели было разработано устройство, на котором можно выполнять интенсивные упражнения для развития моторики, связанной с ходьбой, у паретических и гемипаретических пациентов на ранних стадиях процесса реабилитации, когда они еще находятся в состоянии неустойчивого кровообращения. Такое устройство описано, например, в документе ЕР 1169003 В1. В устройстве, описанном в этом документе, обеспечивается стол, который можно постепенно перемещать из горизонтального положения, соответствующего горизонтальному положению пациента, в вертикальное положение, соответствующее вертикальному положению пациента. Кроме того, в этом устройстве обеспечиваются механизмы для коленных суставов и ступней, причем механизм для коленных суставов может осуществлять движение этих суставов и соответственно ног пациента без всяких усилий с его стороны.
В этом устройстве положение механизмов для коленных суставов и ступней может регулироваться на столе для подгонки устройства под рост пациента. Однако в зависимости от роста пациента такая регулировка может привести к тому, что пациент будет находиться сравнительно высоко над землей в вертикальном положении стола, что может затруднять работу врача с пациентом, которая особенно необходима, когда пациент находится в состоянии нестабильного кровообращения, или у него имеются и другие серьезные нарушения.
Поэтому целью настоящего изобретения является создание устройства для терапии двигательной активности общего характера, описанного в документе ЕР 1169003 В1, в котором положение пациента в вертикальном положении устройства может обеспечиваться на достаточно небольшой высоте.
Для достижения этой цели используется устройство, заявленное в п. 1 формулы изобретения. Зависимые пункты формулы содержат дополнительные варианты, и по меньшей мере некоторые из них являются дальнейшими улучшениями вышеуказанного устройства, раскрытого в документе ЕР 1169003 В1.
В соответствии с одним из вариантов предложено устройство для терапии двигательной активности, включающее:
основание;
первую часть стола;
механизм наклона, соединяющий основание с первой частью стола;
механизм для ступней, установленный на первой части стола;
механизм движения ног для осуществления движения ног, в частности коленных суставов, пациента; и
вторую часть стола, соединенную с первой частью стола, причем вторую часть стола можно регулировать относительно первой части стола для подгонки устройства под пациентов разного роста.
В таком устройстве механизм наклона может обеспечивать движение стола, формируемого первой частью стола и второй частью стола, между горизонтальным положением и вертикальным положением. Поскольку механизм для ступней установлен на первой части стола и подгонка устройства под рост пациента осуществляется путем регулирования положения второй части стола, соединенной с первой частью стола, то положение механизма для ступней, в частности в вертикальном положении, не зависит от изменения длины устройства в соответствии с ростом пациента, что позволяет обеспечивать сравнительно небольшую высоту пациента над полом, в результате чего облегчается работа врачей с пациентом. Иначе говоря, вторая часть стола в таких вариантах присоединена к механизму наклона только через первую часть стола, а не напрямую.
В одном из вариантов механизм наклона может поворачивать (наклонять) первую часть вокруг оси, соединяющей первую часть стола с механизмом наклона. В одном из вариантов устройство содержит дополнительно механизм подъема для перемещения первой части стола, возможно вместе с механизмом наклона, в вертикальном направлении.
Кроме регулировки положения второй части стола относительно первой части стола для изменения длины стола вторая часть стола может быть выполнена с возможностью наклона относительно первой части стола для выборочной регулировки степени сгибания или разгибания тазобедренного сустава.
В некоторых вариантах механизм для ступней может содержать первую и вторую опорные площадки для ступней. В одном из вариантов первая и вторая опорные площадки для ступней могут содержать датчики нагрузки для измерения усилий, с которыми пациент воздействует на эти опорные площадки. Вместо датчиков нагрузки или дополнительно к ним могут использоваться и другие средства измерения нагрузки. В других вариантах вместо датчиков нагрузки или дополнительно к ним первая и вторая опорные площадки для ступней могут содержать механические элементы для выборочной механической стимуляции некоторых участков ступней пациентов. Эта механическая стимуляция может осуществляться синхронно с работой механизма движения ног.
Механизм для ступней может также содержать первое опорное основание и второе опорное основание, которые установлены на первой части стола, причем они могут быть установлены с возможностью скольжения в соответствии с движениями ног. Первая опорная площадка может быть установлена на первом основании с использованием первого двойного шарнирного соединения, и вторая опорная площадка может быть установлена на втором основании с использованием второго двойного шарнирного соединения. Такие двойные шарнирные соединения, которые могут содержать стержень, пластину или другой удлиненный элемент между двумя шарнирами, причем один конец стержня соединяется с первой опорной площадкой у ее носка с использованием первого шарнира, и второй конец стержня соединяется с основанием с использованием второго шарнира, могут делать движения ног более естественными. В некоторых вариантах естественность движений можно дополнительно улучшить путем обеспечения стимуляции ступни при ударе, когда опорная площадка для ступни замедляется или останавливается на упоре-ограничителе. Такая остановка может быть обеспечена с помощью упругого ограничителя, такого как пружина, для регулирования силы, действующей на ступню.
Следует отметить, что вышеописанные механизмы для ступни, кроме вышеописанного устройства, могут использоваться также и в других устройствах для терапии двигательной активности.
Устройство может также содержать средство электрической стимуляции, которое может быть сконфигурировано для электрической стимуляции мышц, в частности мышц ног пациента, синхронно с работой механизма движения ног.
Механизм движения ног может содержать первый механизм для левой ноги и второй механизм для правой ноги пациента. Расстояние между первым механизмом и вторым механизмом может быть регулируемым для подгонки механизма движения ног под расстояние между ногами пациента. Такая подгонка может также использоваться отдельно от вышеописанного устройства, то есть может использоваться также и в других устройствах для терапии двигательной активности.
В некоторых вариантах к первой части стола и/или ко второй части стола, особенно ко второй части, могут быть прикреплены тазобедренные ремни. Дополнительно могут обеспечиваться плечевые ремни для фиксации на устройстве торса пациента.
Регулировка механизма движения ног может быть выполнена, когда первая и вторая части стола находятся в горизонтальном положении, то есть когда пациент лежит на столе. Фиксируя тазобедренную часть тела пациента с помощью тазобедренных ремней и осуществляя соответствующую регулировку механизма движения ног, можно обеспечить надлежащий центр вращения для движения ног, в результате чего будут снижаться силы сдвига, которые могут возникать, когда механический центр вращения и ортопедически подходящий центр вращения смещены друг от друга.
Другие особенности и варианты осуществления изобретения станут понятными из нижеприведенного подробного описания со ссылками на прилагаемые чертежи, на которых:
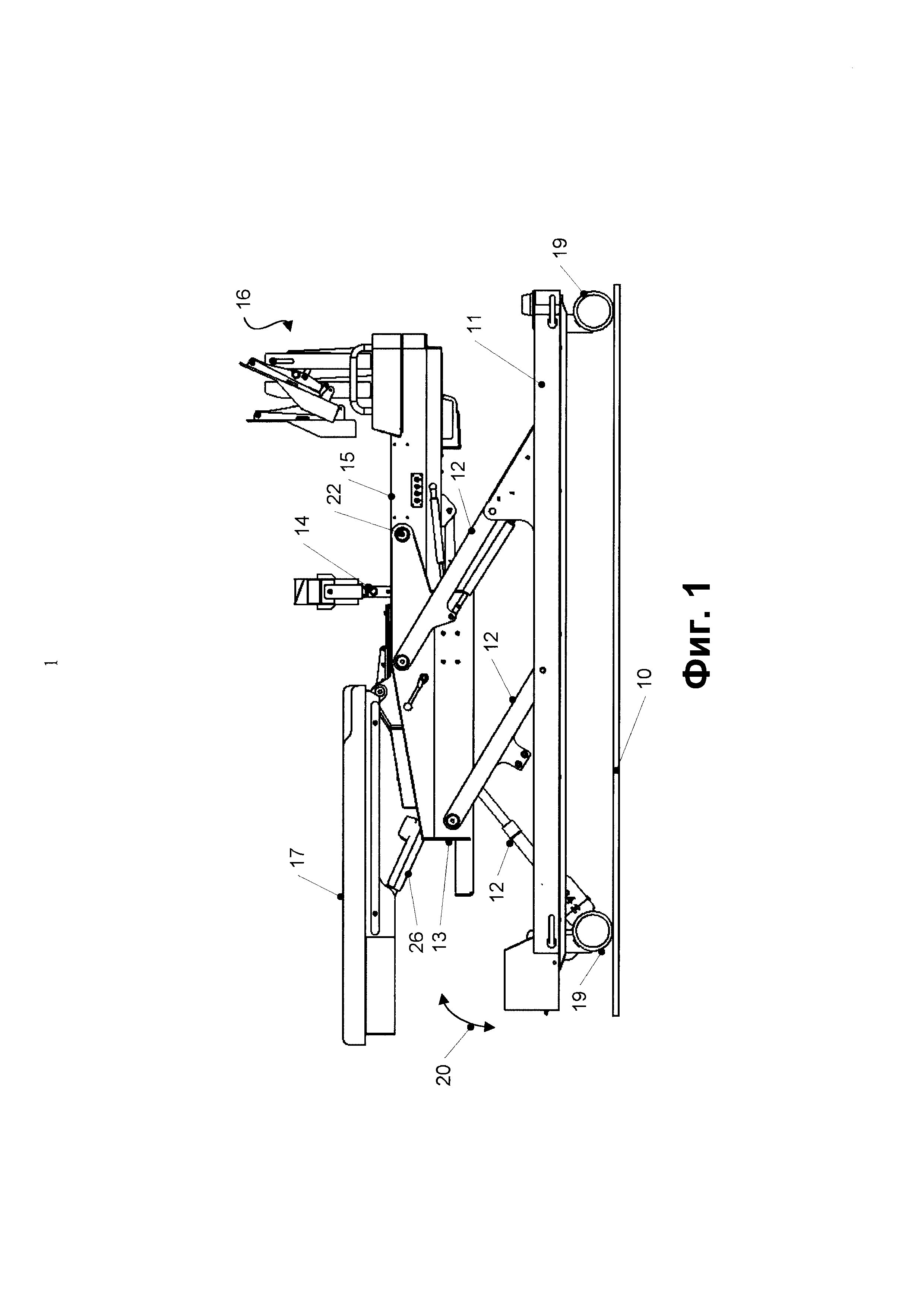
фигура 1 - вид сбоку устройства по одному из вариантов осуществления изобретения;
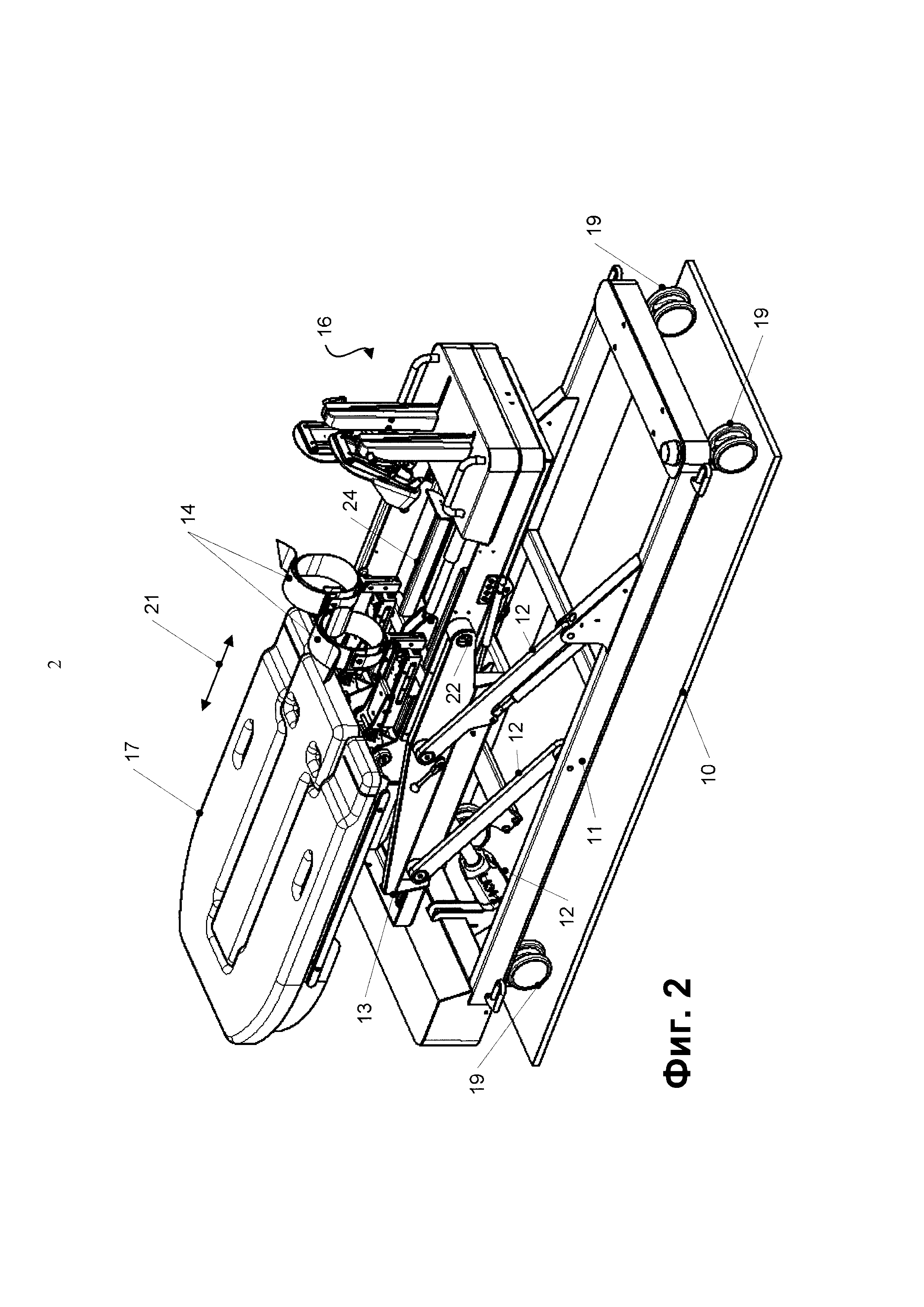
фигура 2 - вид в перспективе устройства, показанного на фигуре 1;
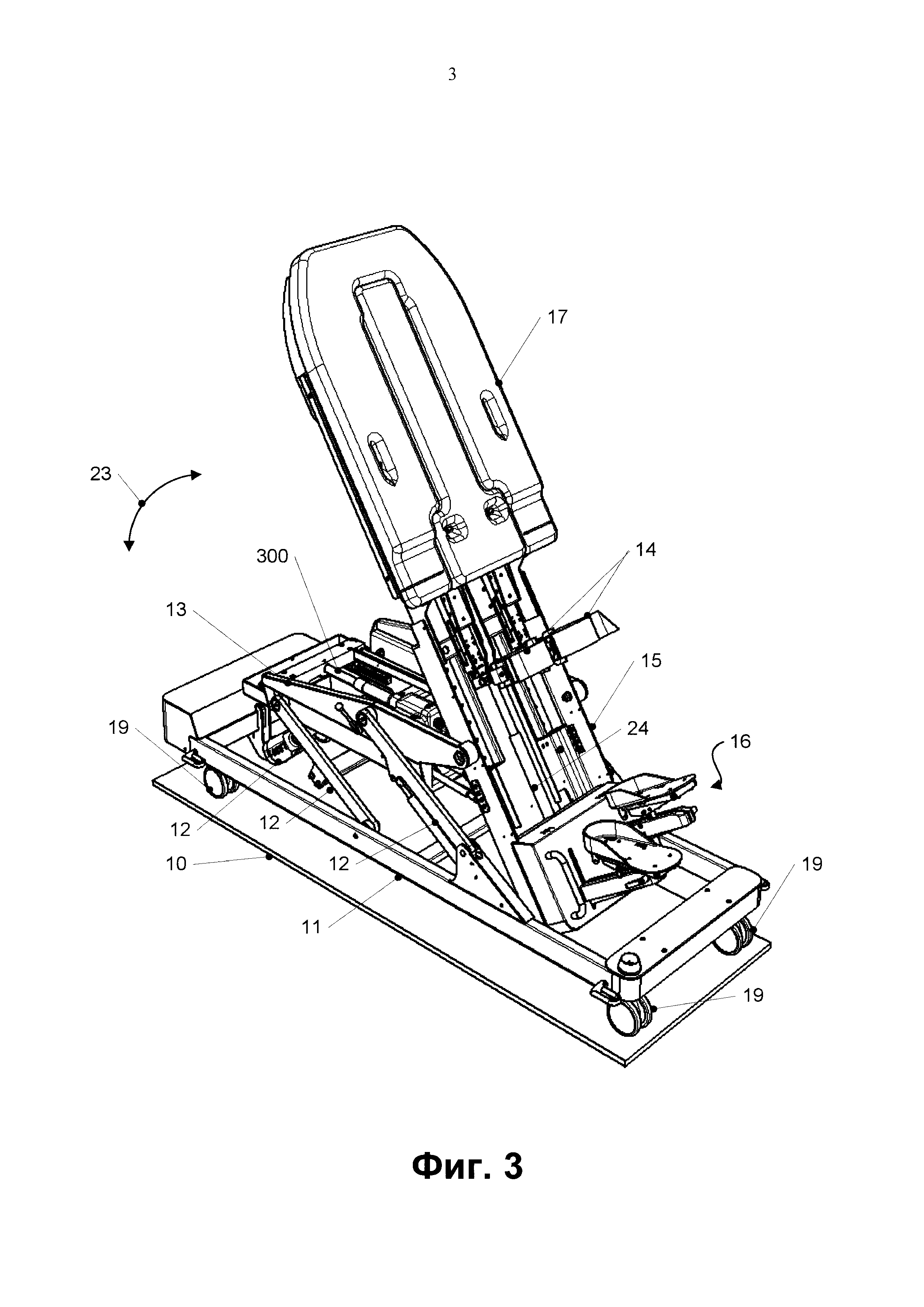
фигура 3 - вид в перспективе устройства, показанного на фигуре 1, со столом в промежуточном положении;
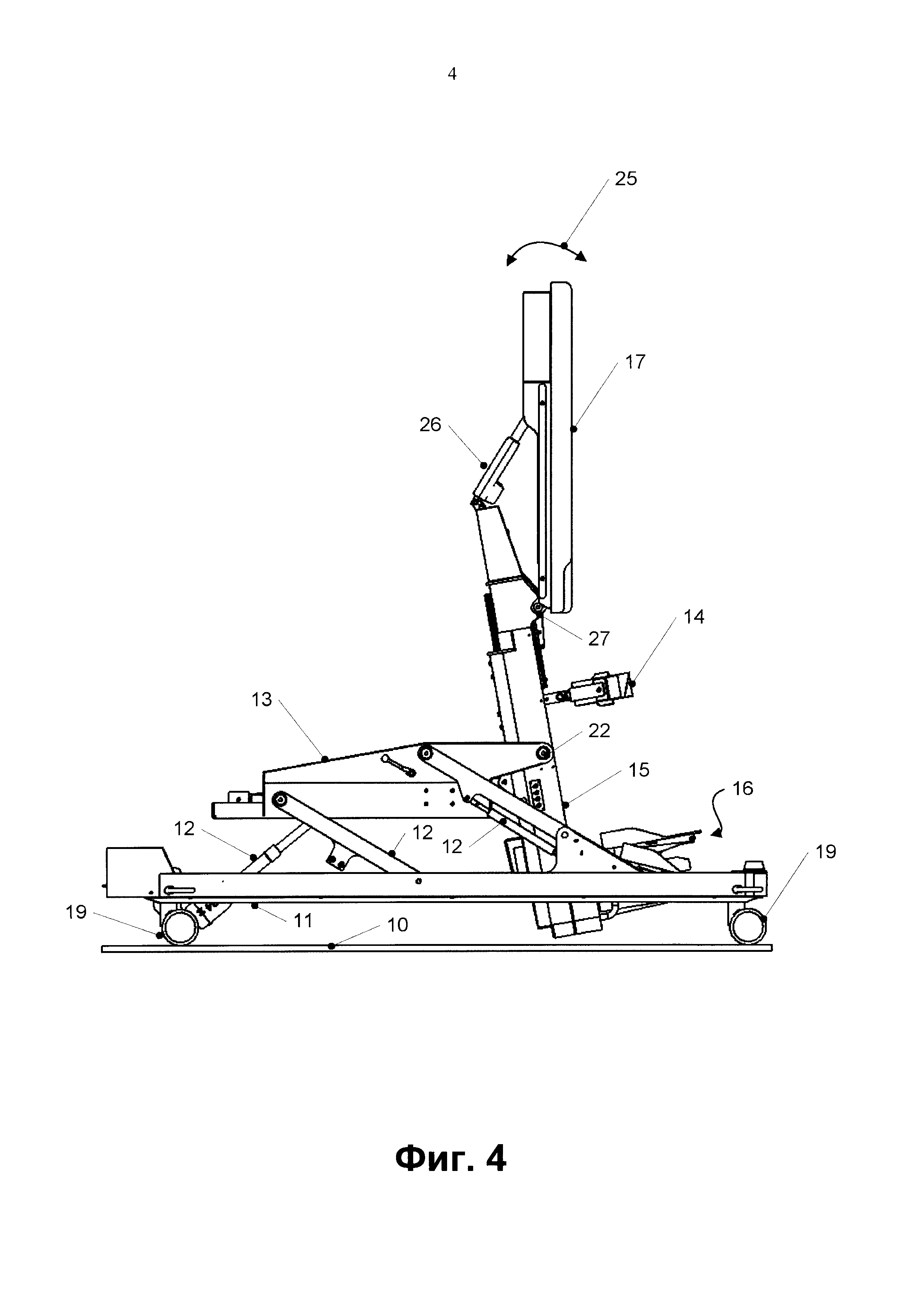
фигура 4 - вид сбоку устройства, показанного на фигуре 1, со столом в почти вертикальном положении;
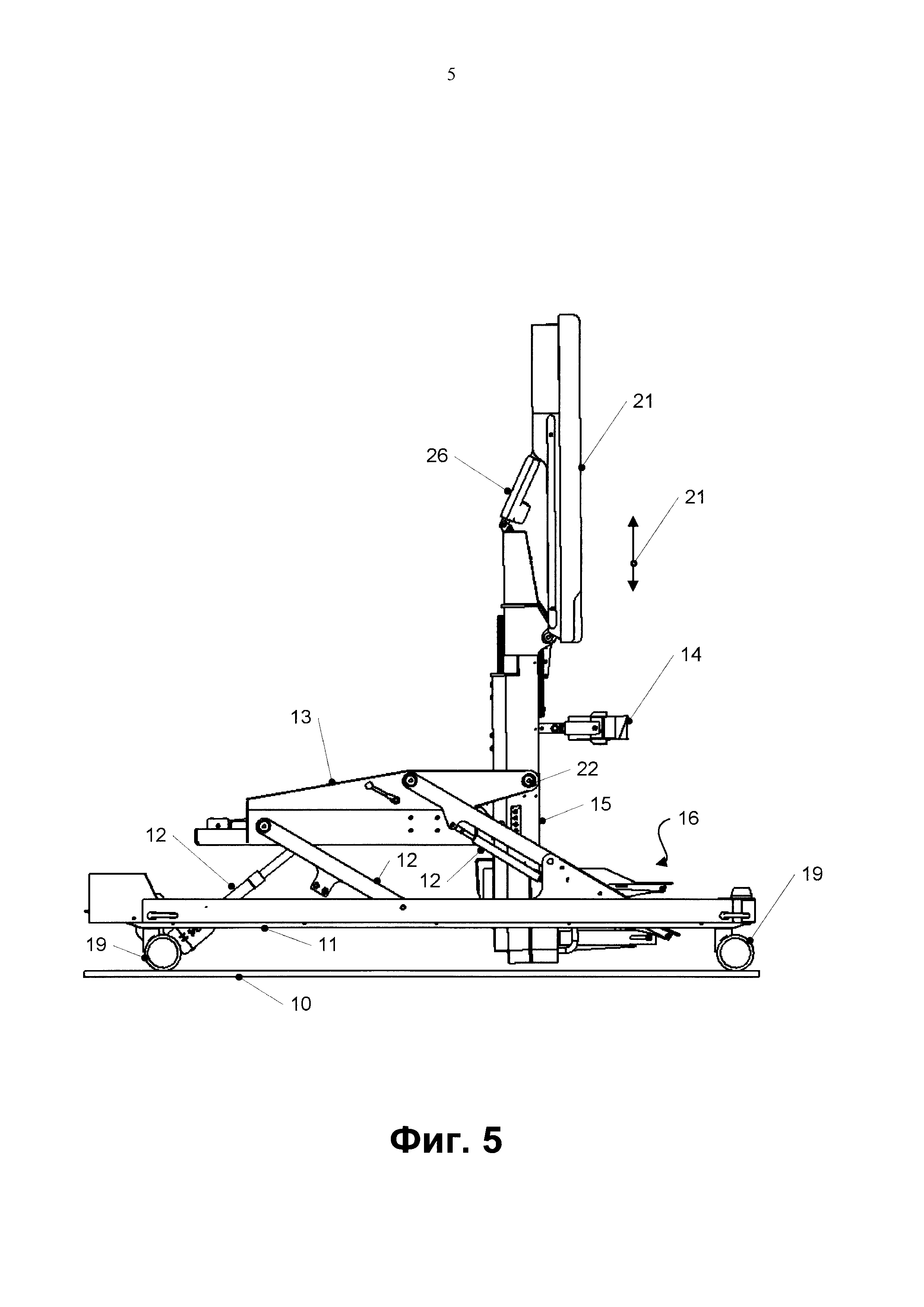
фигура 5 - вид сбоку устройства, показанного на фигуре 1, со столом в вертикальном положении;
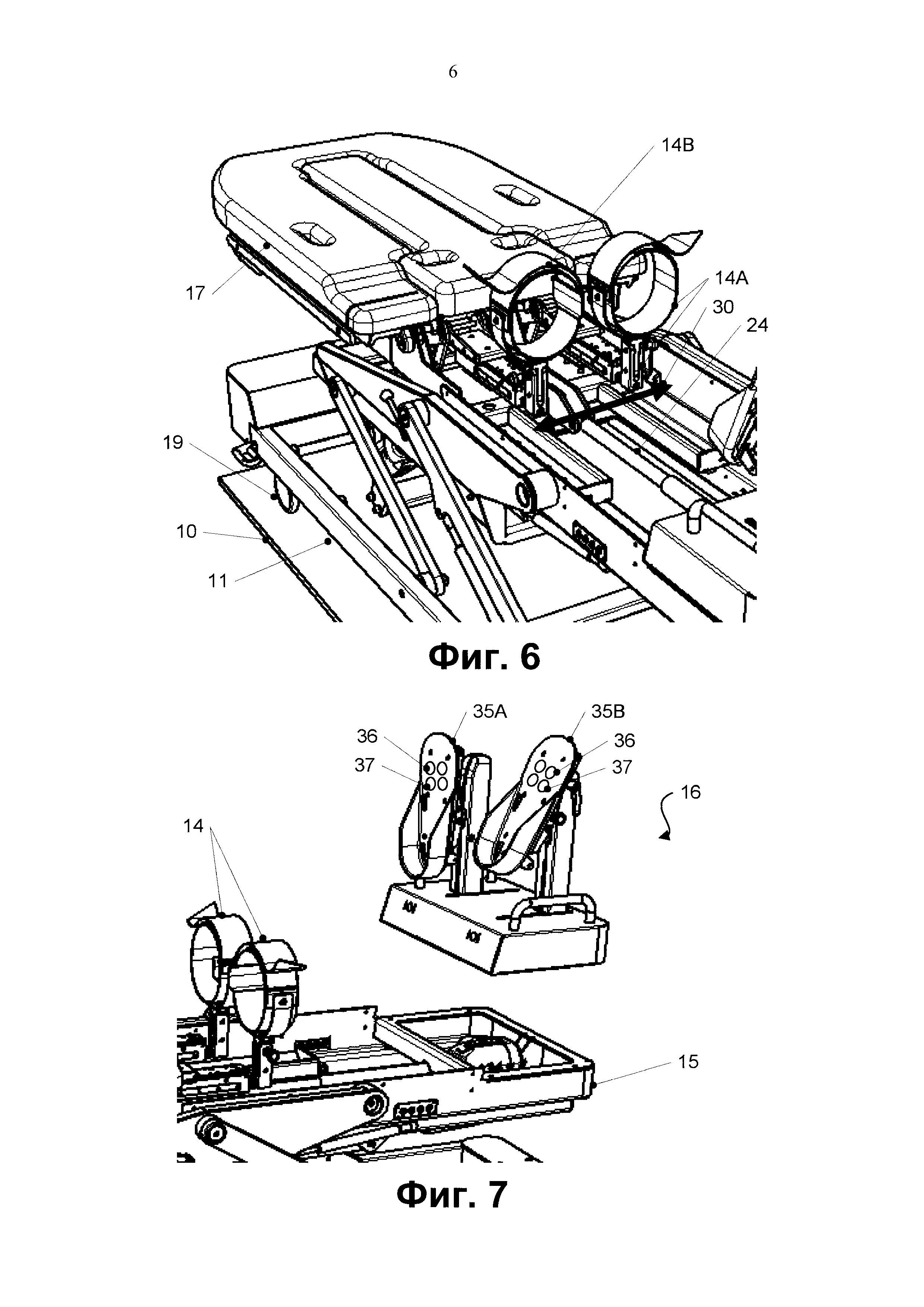
фигура 6 - частичный вид устройства по одному из вариантов осуществления изобретения для иллюстрации регулировки механизма движения ног;
фигура 7 - частичный вид устройства по одному из вариантов осуществления изобретения, иллюстрирующего механизм для ступней;
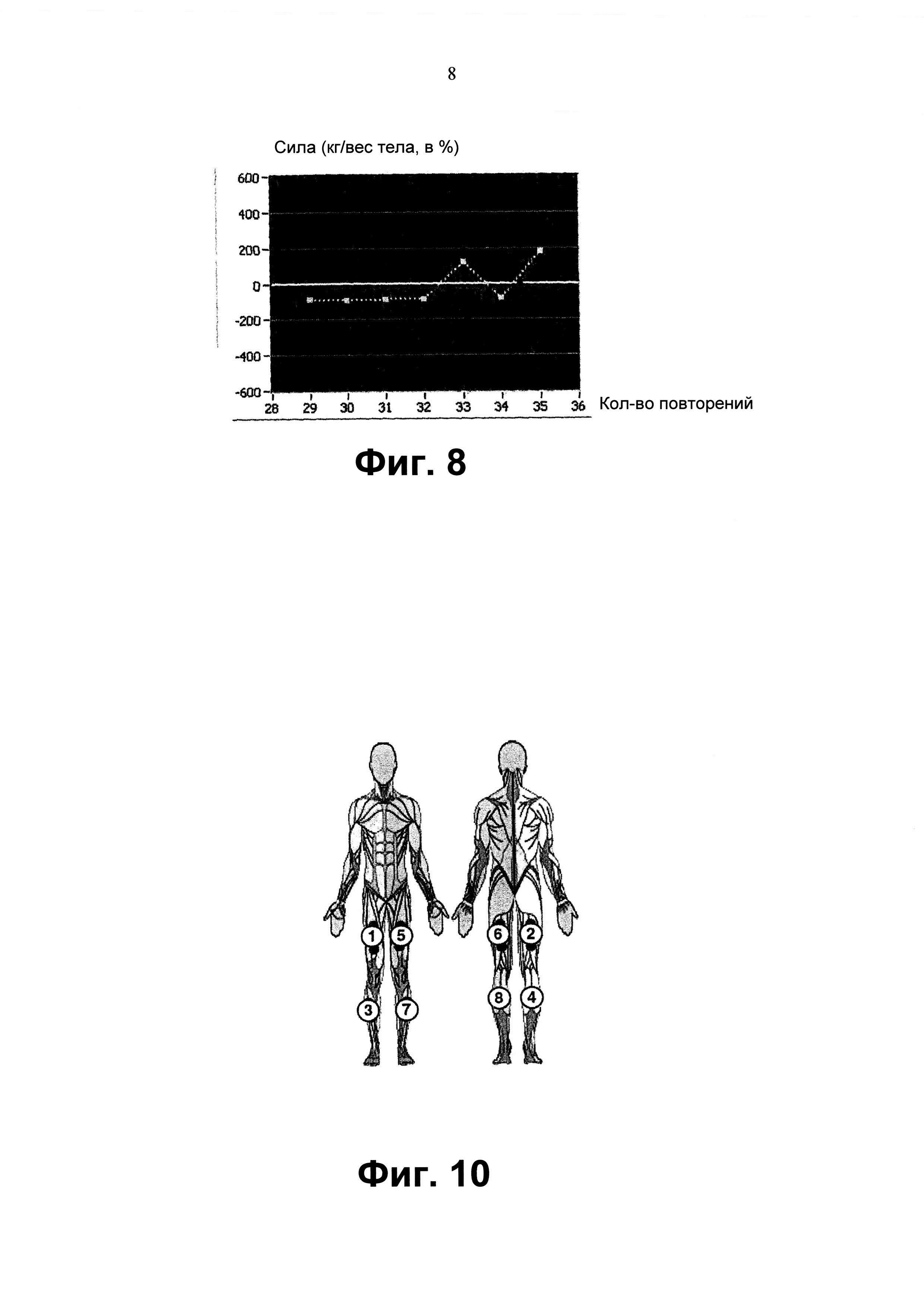
фигура 8 - график, иллюстрирующий нагрузку устройства по одному из вариантов осуществления изобретения;
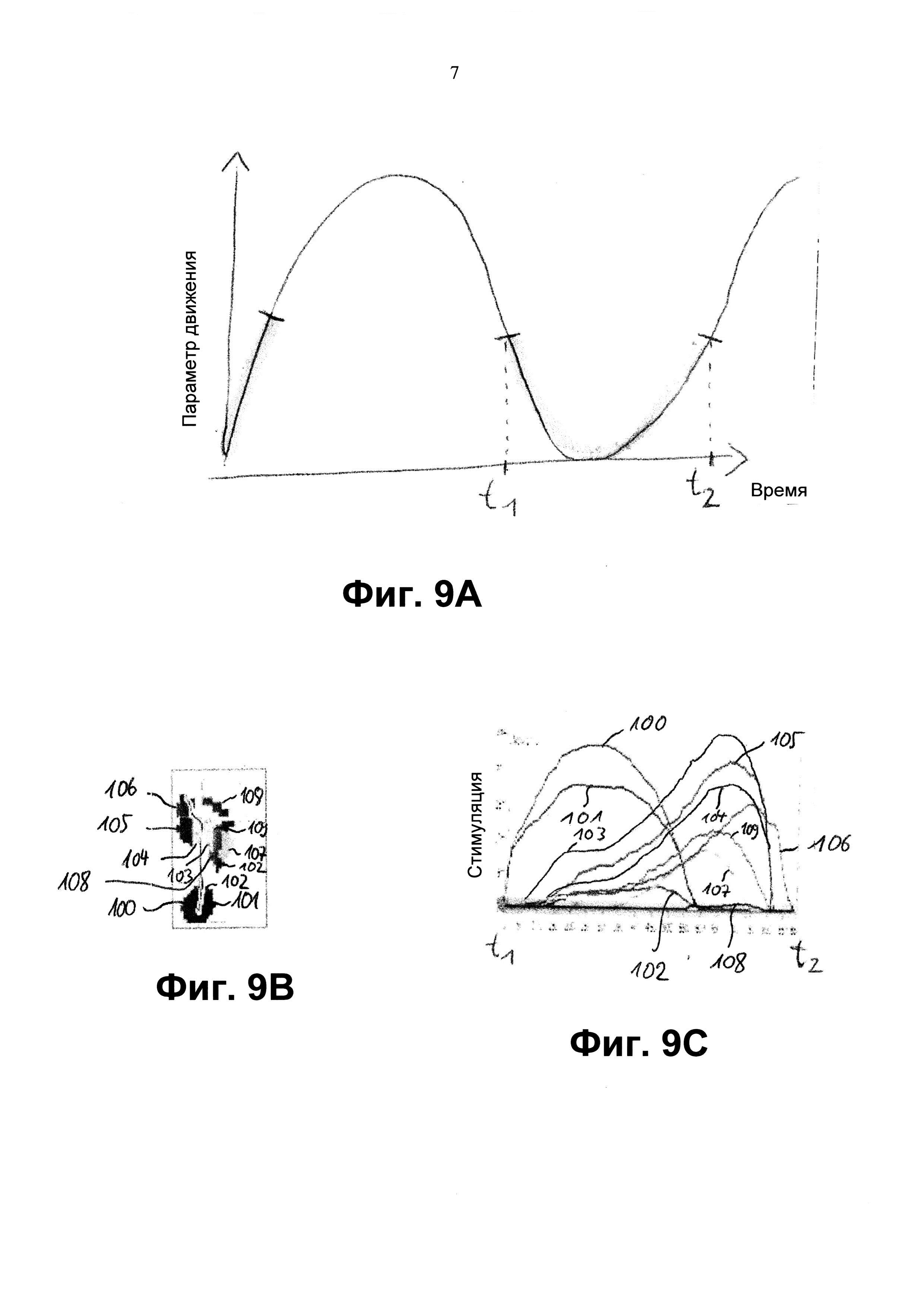
фигуры 9А-9С - примеры стимуляции ступней;
фигура 10 - схемы, на которых показаны разные группы мышц, которые могут стимулироваться в одном из вариантов осуществления изобретения;
фигура 11 - блок-схема, иллюстрирующая некоторые особенности некоторых вариантов;
фигуры 12А-12С - схематические виды варианта механизма для ступней в трех разных положениях;
фигуры 13А и 13В - схемы тазобедренных ремней, которые могут использоваться в некоторых вариантах;
фигура 14 - вид сбоку устройства по одному из вариантов осуществления изобретения с механизмом опускания в критической ситуации;
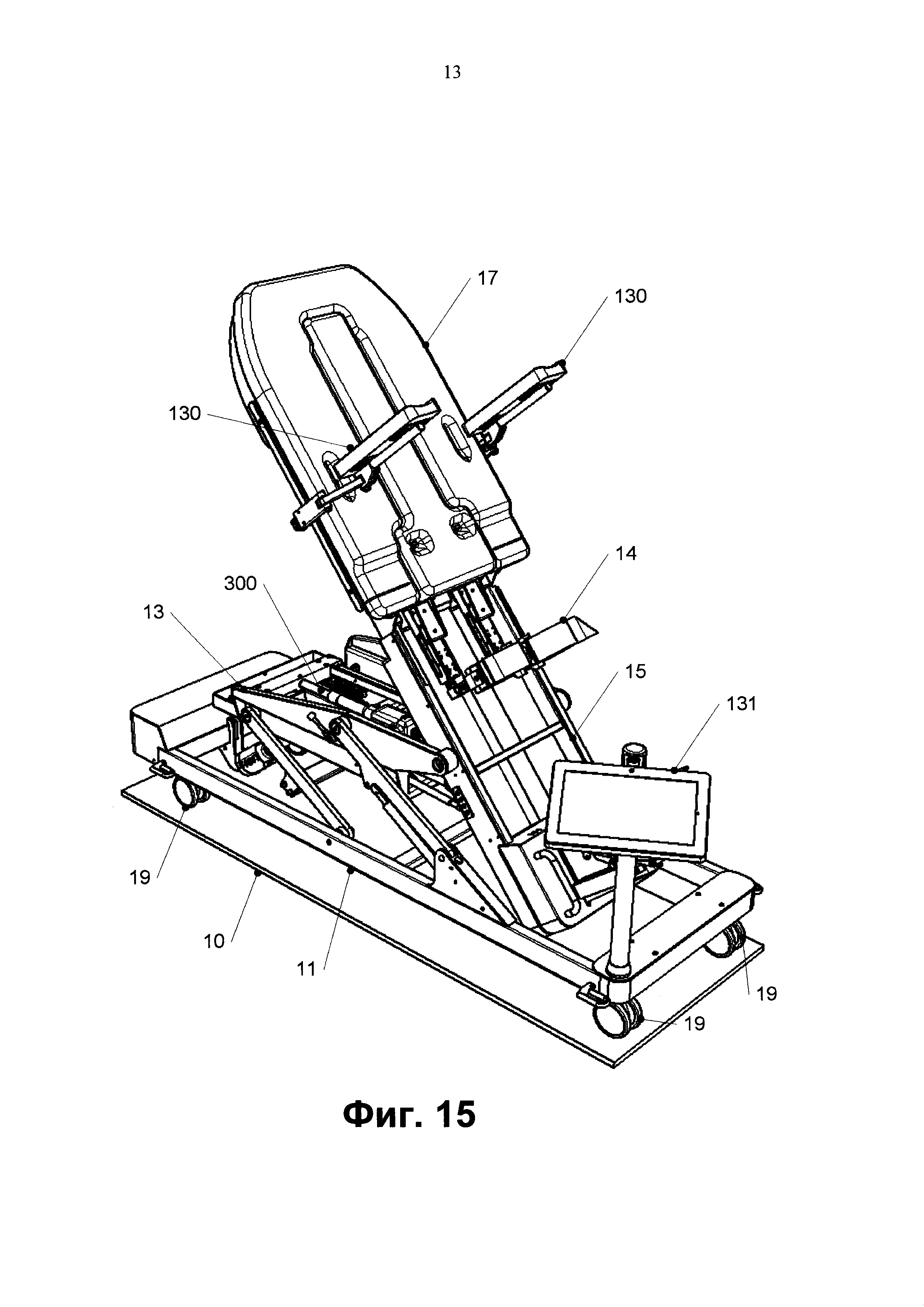
фигура 15 - вид в перспективе устройства по одному из вариантов осуществления изобретения;
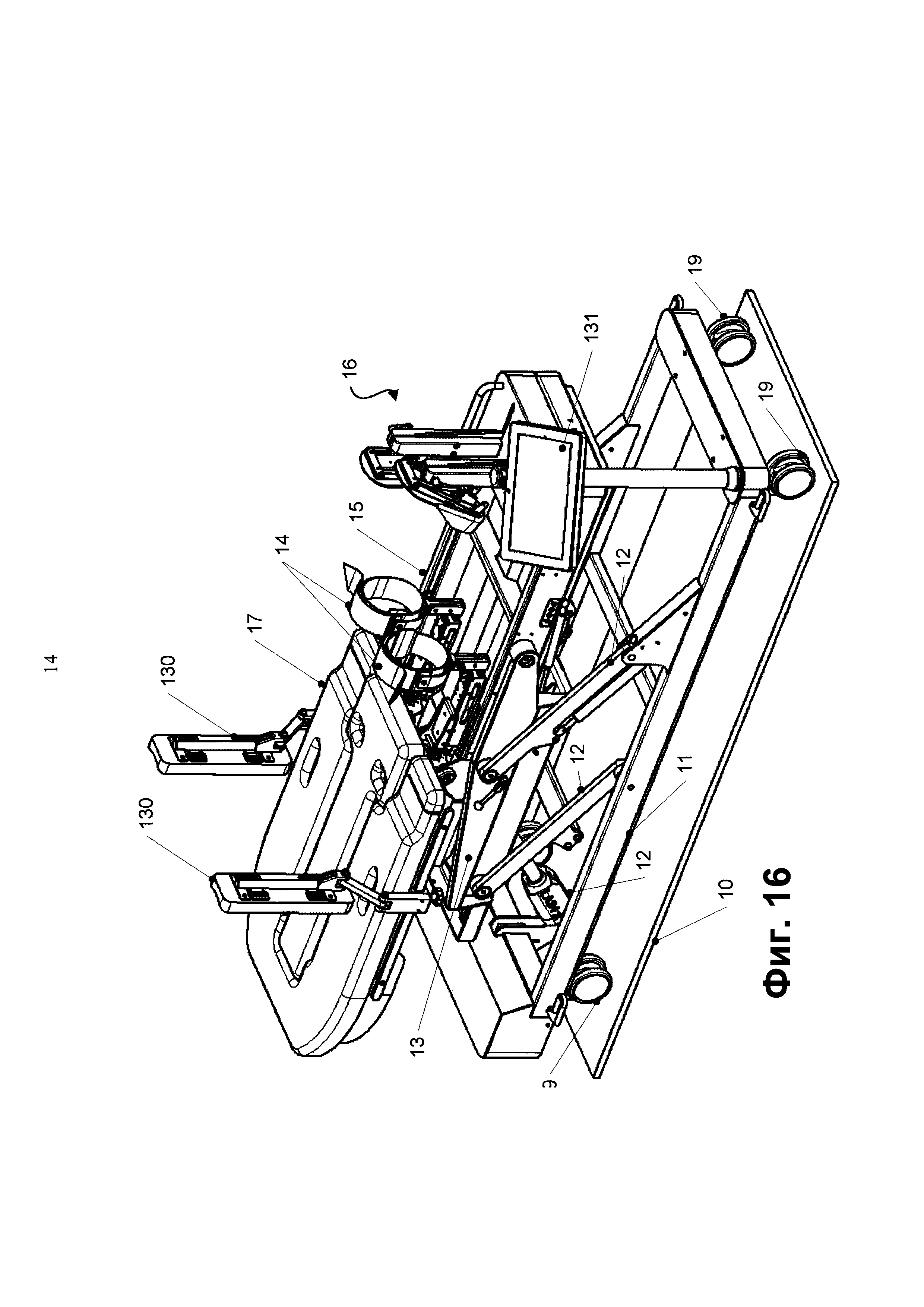
Фигура 16 - еще один вид в перспективе устройства, показанного на фигуре 15.
Варианты осуществления настоящего изобретения будут описаны ниже со ссылками на прилагаемые чертежи. Следует иметь в виду, что эти варианты даются лишь в иллюстративных целях и не должны рассматриваться как ограничения объема настоящего изобретения.
Следует иметь в виду, что признаки разных вариантов могут использоваться вместе, если в явной форме не указано иное. Кроме того, описание варианта, содержащего множество признаков, не должно пониматься, что все указанные признаки необходимы для практической реализации изобретения, поскольку другие варианты могут содержать меньше признаков и/или признаки, которые являются альтернативами признаков, показанных на чертежах и раскрытых в описании.
Различные компоненты вариантов, показанных на чертежах, необязательно показаны в масштабе относительно других компонентов, однако они изображаются таким образом, чтобы обеспечить ясное понимание соответствующего варианта.
На фигурах 1-5 показаны различные виды устройства для терапии двигательной активности по одному из вариантов осуществления изобретения. В частности, на фигуре 1 показан вид сбоку устройства со столом, содержащим первую часть 15 и вторую часть 17, которые находятся в горизонтальном положении. На других фигурах показаны другие положения устройства. Необходимо отметить, что выполнение упражнений возможно в различных положениях, например в горизонтальном положении, показанном на фигуре 1, в наклонном и в вертикальном положениях, которые будут описаны ниже.
Устройство, показанное на фигуре 1, содержит также рамное основание, а именно основание 11 с колесами 19 для качения устройства по полу 10. Однако в других вариантах устройство может быть стационарным, без колес. Первая часть 15 соединена с рамой основания 11 с помощью подъемного механизма 12 и механизма 13 наклона. С помощью подъемного механизма 12, содержащего штоки и приводы, механизм 13 наклона вместе с первой 15 и второй 17 частями стола может быть поднят в вертикальное положение по дугообразной траектории, показанной стрелкой 20, то есть траектория имеет горизонтальную компоненту.
Кроме того, как это будет описано ниже, для наклона стола, формируемого первой частью 15 и второй частью 17, между горизонтальным положением, показанным на фигуре 1, и вертикальным положением первая часть 15 может поворачиваться вокруг оси 22 с помощью механизма 13 наклона. Следует иметь в виду, что показанные механизмы 12, 13 подъема и наклона соответственно являются просто примерами, и в других вариантах могут использоваться другие механизмы, например, имеющие более одной оси, для подъема и/или наклона первой части 15 стола относительно основания 11.
Далее, на первой части 15 стола установлен механизм для ступней, в котором размещаются ступни пациента, использующего устройство. Также устройство содержит механизм 14 движения ног, которые могут быть снабжены ремнями, фиксирующими ноги пациента на механизме, обеспечивающем движения ног пациента, использующего устройство, в частности сгибание ног в коленях для воспроизведения движений, характерных для ходьбы. Ремни могут быть регулируемыми для подгонки механизма 14 движения ног под разные диаметры ног пациентов. Механизмы, подходящие для осуществления движений ног, подробно описаны в вышеуказанном документе ЕР 1169003 В1 и здесь не будут описываться, за исключением дополнительных возможностей регулировки, которые раскрываются ниже со ссылками на фигуру 6.
На фигуре 2 приведен вид в перспективе устройства, показанного на фигуре 1, в том же положении, то есть механизм 13 наклона немного приподнят подъемным механизмом 12, и первая 15 и вторая 17 части стола находятся в горизонтальном положении. Как можно видеть на фигуре 2, вторая часть 17 стола соединена с первой частью 15 стола с помощью приводного механизма 24, например с использованием линейного привода. С помощью приводного механизма 24 можно регулировать положение второй части 17, как показано стрелкой 21, относительно первой части 15 стола для подгонки устройства под рост пациента. Например, для высоких пациентов вторая часть 17 стола, на которой в процессе работы устройства находится голова и спина пациента, может быть перемещена в сторону от первой части 15 стола, а для невысоких пациентов часть 17 может быть перемещена в сторону части 15. Поскольку первая часть 15 стола установлена на механизме 13 наклона для ее поворота вокруг оси 22, такая регулировка для подгонки устройства под рост пациента не изменяет расстояния между механизмом 16 для ступней и осью 22, и поэтому, как это будет более подробно описано ниже, сохраняется положение механизма 16, и при повороте первой части 15 стола пациент будет по-прежнему находиться на небольшой высоте.
Результат такого поворота показан на фигуре 3. Как показано на фигуре 3, нижняя часть 15 стола повернута вокруг оси 22, как показано стрелкой 23, механизмом 13 наклона, в котором используется привод 300, в промежуточное положение между горизонталью и вертикалью, например в положение под углом примерно 45 градусов.
На фигуре 4 первая часть 15 стола и соответственно также и соединенная с ней вторая часть 17 стола показаны в почти вертикальном положении. Кроме того, как показано на фигуре 4, с помощью механизма 26, например другого линейного привода, вторая часть 17 стола может быть наклонена по стрелке 25 относительно первой части 15 стола. Таким образом, может регулироваться разгибание или сгибание тазобедренного сустава пациента (далее будет указываться просто как "разгибание бедра" или "сгибание бедра" соответственно). Степень разгибания бедра может быть увеличена путем наклона второй части 17 стола назад, то есть налево на фигуре 4, в то время как степень сгибания бедра может быть увеличена путем наклона второй части 17 стола вперед, то есть направо на фигуре 4. В некоторых вариантах при необходимости может быть получено даже нависающее положение пациента. В других вариантах устройство может не содержать механизм 26, например вместо него может использоваться жесткий элемент, так что может быть зафиксировано угловое положение второй части 17 относительно первой части 15.
Кроме того, как можно видеть на фигуре 4, механизм 16 для ступней находится возле самого пола, что достигается путем наклона первой части 15 стола и осуществления любой регулировки высоты путем регулируемого изменения положения второй части 17 относительно первой части 15. Регулировка вертикального положения механизма 13 наклона и соответственно оси 22 может дополнительно обеспечивать удерживание механизма 16 для ступней и соответственно пациента возле самого пола.
Наконец, на фигуре 5 первая часть 15 стола установлена полностью в вертикальное положение. Следует отметить, что в этом положении, как и во всех промежуточных положениях, вторую часть 17 стола также можно смещать регулируемым образом относительно первой части 15 стола, как это показано стрелкой 21.
Необходимо отметить, что различные приводные механизмы, используемые для регулировок и перемещений, которые были описаны со ссылками на фигуры 1-5, могут содержать электродвигатели, пневматические элементы и другие приводы. Также можно представить, что некоторые такие элементы регулируются вручную, например, с помощью коленчатой ручки и соответствующей зубчатой передачи.
Ниже со ссылками на фигуры 6-16 будут описаны различные дополнительные (необязательные) признаки, которые могут быть реализованы в некоторых вариантах устройства, показанного на фигурах 1-5. Необходимо отметить, что эти дополнительные признаки могут быть реализованы не только в устройстве, показанном на фигурах 1-5, но также и в других устройствах, предназначенных для терапии двигательной активности, которые обеспечивают возможность перемещения пациента между горизонтальным и вертикальным положениями, например в устройстве, раскрытом в вышеуказанном документе ЕР 1169003 В1. Также необходимо отметить, что различные признаки, описанные со ссылками на фигуры 6-12, могут использоваться по отдельности, или же могут использоваться различные их комбинации. Тем не менее, для упрощения изложения эти дополнительные признаки будут описываться в отношении вариантов, показанных на фигурах 1-5.
На фигуре 6 показана дополнительная возможность регулировки механизма движения ног. В варианте, представленном на фигуре 6, механизм движения ног включает первый механизм 14А для левой ноги пациента и второй механизм 14В для его правой ноги. Эти механизмы сами по себе могут работать, как это описано в вышеуказанном документе ЕР 1169003 В1, например они могут обеспечивать сгибание и разгибание ноги пациента в колене с использованием эксцентрикового привода. Как показано стрелкой 30 на фигуре 6, расстояние между первым 14А и вторым 14В механизмами может изменяться регулируемым образом, чтобы подстраивать устройство под расстояние между ногами пациента. Такая регулировка может быть обеспечена, например, путем установки механизмов 14А, 14В с возможностью их скольжения в канавках или на подшипниках, или же может использоваться приводной механизм с зубчатой рейкой. Однако возможны также и другие регулировочные механизмы.
На фигуре 7 показан специальный вариант механизма 16 для ступней. В варианте, показанном на фигуре 7, механизм 16 для ступней содержит первую опорную площадку 35А для первой ступни пациента и вторую опорную площадку 35В для его правой ступни.
Опорные площадки 35А, 35В могут быть снабжены датчиками 36 нагрузки для измерения нагрузки, создаваемой пациентом, то есть силы, с которой пациент воздействует на опорную площадку 35А и/или 35В. При выполнении циклических упражнений, например циклических сгибаний и разгибаний ног в коленных суставах, величина силы в отношении к весу тела пациента может быть нанесена на график зависимости от количества повторений, как это показано на фигуре 8. В этом случае возможен хороший контроль и документирование процесса лечения.
В других вариантах вместо датчиков 36 нагрузки в опорных площадках 35А, 35В или в дополнение к ним для измерения нагрузки могут использоваться и другие средства. Например, нагрузка может быть определена опосредованно путем измерения смещения опорных площадок 35А, 35В, вызванного нагрузкой, например путем измерения угла или с помощью потенциометров, и с учетом возвращающей силы пружин или других упругих элементов, смещающих опорные площадки в заданное исходное положение, или же путем измерения силы или вращающего момента в других точках механизмов для ступней, а не непосредственно на опорных площадках 35А, 35В.
В дополнение к датчикам 36 или в качестве их альтернатив опорные площадки 35А, 35В для ступней могут также содержать элементы 37 механической стимуляции. С помощью таких механических элементов может осуществляться выборочное силовое воздействие на различные зоны подошвы ступней пациента. Такая стимуляция может осуществляться синхронно с движением механизма движения ног, так что механическая стимуляция подошвы ног может воспроизводить ощущения перекатывания ступни с пятки на носок, характерного для ходьбы, которое происходит синхронно с движением ходьбы, имитируемым механизмом движения ног. Необходимо отметить, что такое синхронное управление механизмом движения ног и механическая стимуляция подошвы ступней ног не ограничивается циклическими движениями или стимуляциями, и в пределах объема настоящего изобретения возможны также и другие типы координированного управления. Например, в некоторые моменты движения, создаваемого механизмом движения ног, может вводиться стимуляция ступней, имитирующая спотыкание, или же может осуществляться управление механизмом движения ног таким образом, чтобы он сам создавал ощущения спотыкания.
В частности, возможности стимуляции ступней ног будут описаны ниже более подробно со ссылками на фигуру 9. На фигуре 9А показан график изменения во времени параметра движения, например амплитуды или положения механизма движения ног, в котором большая амплитуда может соответствовать согнутому коленному суставу, а малая амплитуда может соответствовать распрямленному коленному суставу. Стимуляция ступней может осуществляться по частям, например с малой амплитудой от момента t1 до момента t2 времени в каждом цикле работы механизма движения ног. Остальное время, когда амплитуда параметра движения увеличена, может соответствовать стадиям ходьбы, в которых ступня отрывается от земли. Соответственно на этих стадиях стимуляция ступни не осуществляется, то есть на нее не действует дополнительное давление.
В интервале времени от t1 до t2 стимуляция может начинаться с пятки и продвигаться к носку ступни. Пятка и носок ступни могут быть разделены на разные части, стимуляция которых осуществляется в разные моменты времени и/или с разными интенсивностями. Примеры таких стимуляций показаны на фигурах 9В и 9С, причем на фигуре 9В показаны разные зоны ступни (в данном случае правой ступни), и на фигуре 9С показаны соответствующие графики стимуляции для разных зон. Зоны и соответствующие им кривые стимуляции (зависимости интенсивности стимуляции от времени) указаны на этих фигурах одинаковыми ссылочными номерами 100-109. Однако разбиение ступни на зоны и кривые стимуляции, показанные на фигуре 9С, являются лишь примерами, и в других вариантах возможны другие разбиения или кривые стимуляции, например разбиения на большее или меньшее количество зон.
В некоторых вариантах также используется электростимуляция мышц пациента, в особенности мышц ног. Такая электростимуляция также известна как функциональная электростимуляция.
Например, на фигуре 10 приведены виды спереди и сзади человека, и на них схематически показаны разные группы мышц, указанные номерами 1-8. Эти группы мышц могут стимулироваться синхронно с работой механизма 14 движения ног по предыдущим вариантам.
Например, на стадии увеличения амплитуды движения ног, показанной на фигуре 9А (положительный наклон кривой), могут стимулироваться мышцы групп 2, 4, 6 и 8, и на стадии уменьшения амплитуды движения ног (отрицательный наклон кривой) могут стимулироваться мышцы групп 1, 3, 5 и 7 с использованием электродов, на которые подается соответствующее напряжение. Однако указанная схема стимуляции является лишь примером, и в других вариантах могут стимулироваться только некоторые из показанных групп мышц.
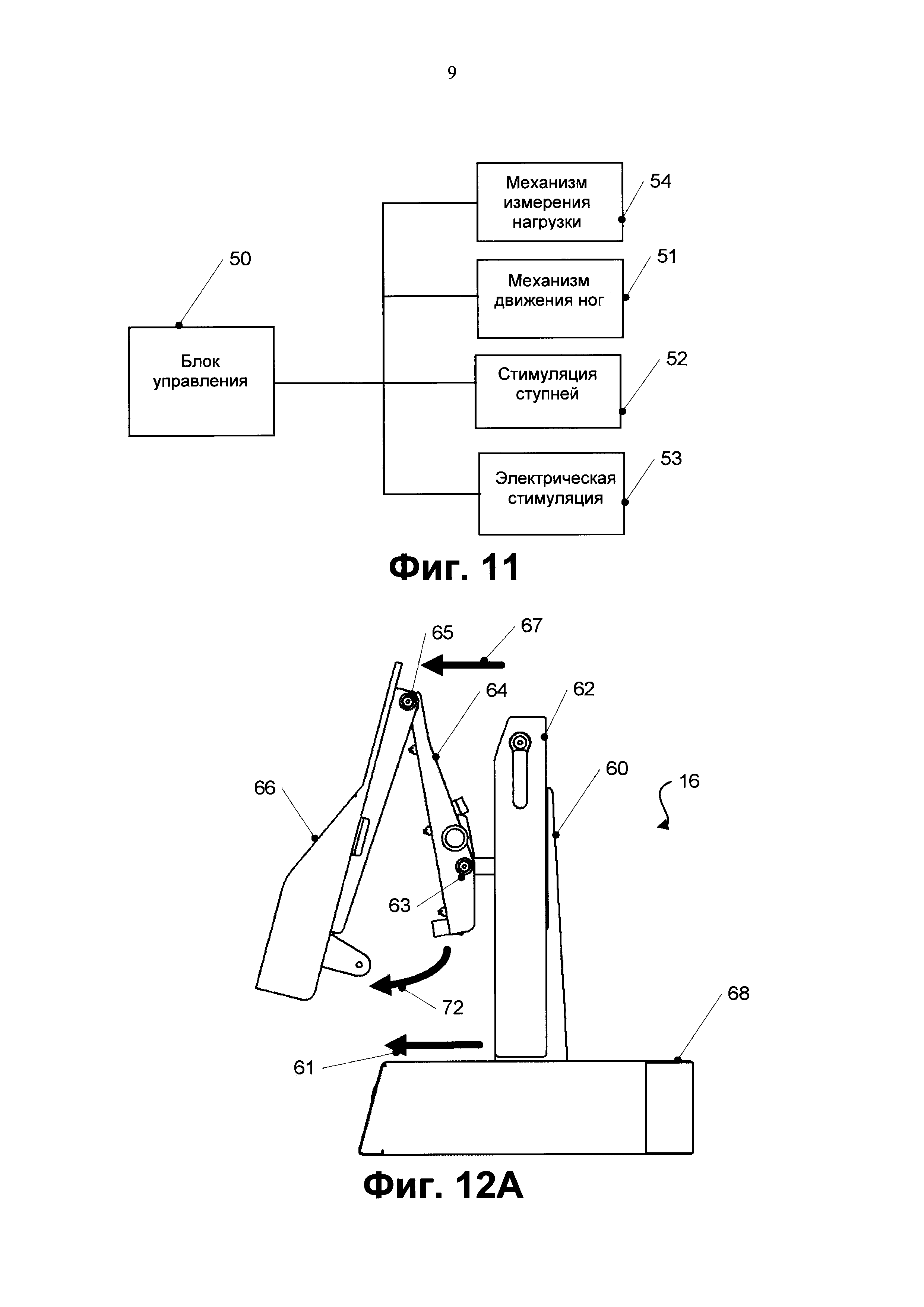
На фигуре 11 приведена блок-схема, иллюстрирующая возможности устройства, в котором используется электростимуляция ступней. В соответствии с блок-схемой блок управления 50, например микропроцессор, запрограммированный соответствующим образом, осуществляет управление механизмом 51 движения ног, например, механизмом 14 движения ног в вариантах, показанных на фигурах 1-5. Кроме того, блок 50 управления осуществляет управление стимуляцией 52 ступней, например стимуляцией ступней, описанной со ссылками на фигуры 7 и 9, синхронно с механизмом 51 движения ног. Дополнительно к стимуляции 52 ступней или вместо нее блок управления 50 может также осуществлять управление электростимуляцией 53 синхронно с механизмом 51 движения ног, например, как это было описано со ссылками на фигуру 10. Следует отметить, что другие варианты могут не содержать стимуляцию 52 ступней и электростимуляцию 53. Блок 50 управления может дополнительно принимать сигналы из механизма 54 измерения нагрузки, который может быть реализован, как это было описано со ссылками на фигуру 7.
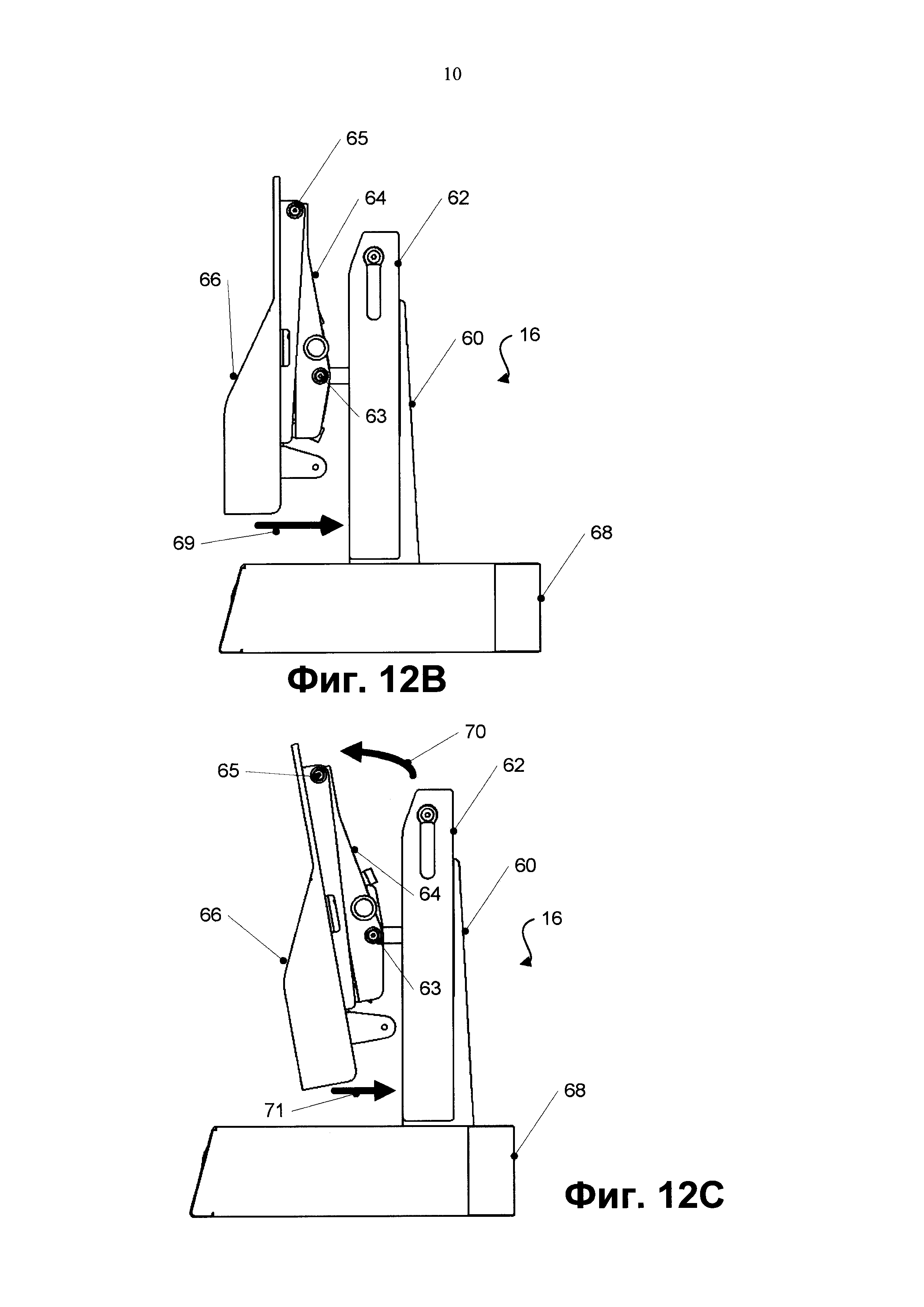
Далее со ссылками на фигуры 12А-12С описывается конкретный механизм 16 для ступней. Этот механизм для ступней может использоваться не только в варианте, показанном на фигурах 1-5, но также и в других устройствах для терапии двигательной активности. Кроме того, механизм для ступней, показанный на фигурах 12А-12С, может быть объединен с датчиками нагрузки и/или с устройством механической стимуляции ступней, показанном на фигуре 7, однако может использоваться и без этих устройств.
На фигурах 12А-12С показан механизм 16 для ступней в трех разных положениях, например, соответствующих трем разным стадиям цикла работы механизма движения ног.
На фигурах 12А-12С показан механизм для одной ступни, однако могут быть обеспечены два таких механизма, один - для левой ноги и второй - для правой ноги пациента.
Механизм 16 для ступней, показанный на фигурах 12А-12С, содержит монтажное основание 68, которое может быть установлено, например, на первой части 15 стола варианта, показанного на фигурах 1-5. На монтажном основании 68 установлена с возможностью скольжения несущая часть 60, имеющая форму ребра. К несущей части 60 прикреплена промежуточная часть 62. Опорная площадка 66 для ступни соединена с промежуточной частью 62 и соответственно с несущей частью 60 с помощью двух шарниров, которые в варианте, показанном на фигурах 12А-12С, имеют форму первого шарнира 63 на промежуточной части 62 и второго шарнира 65 на верхнем конце опорной площадки 66 (то есть части, в которую упирается носок ступни). Шарниры 63, 65 соединены удлиненным элементом 64, имеющим форму стержня или удлиненной пластины. Когда опорная площадка 66 для ступни, по существу, параллельна промежуточной части 62, как это показано на фигуре 12В, шарнир 63 ближе к пяточной части 66, чем к части носка. Шарниры 63, 64 могут представлять собой петли.
За счет возможности скольжения несущей части 60 по монтажному основанию и двух шарниров между опорной площадкой 66 для ступней и промежуточной частью 62 в некоторых случаях может предотвращаться неблагоприятное положение нижней части ноги пациента и соответственно будет предотвращаться возможность повреждения коленного сустава.
Например, на фигуре 12А показано движение, соответствующее сгибанию коленного сустава, которое может инициироваться механизмом 14 движения ноги, показанным на фигурах 1-5. В этом случае несущая часть 60, как показано стрелкой 61, скользит вверх (в направлении головы пациента), опорная площадка 66 для ступни отходит от промежуточной части 62 и от несущей части 60, как это показано стрелкой 67, и опорная площадка 66 наклоняется, как это показано стрелкой 72. На фигуре 12В показана ситуация, в которой происходит разгибание коленного сустава. В этом случае несущая часть 60 скользит вниз (в сторону от головы пациента) на монтажном основании 68, как это показано стрелкой 69, опорная площадка 66 подходит к промежуточной части 62 и устанавливается параллельно ей.
На фигуре 12С механизм движения ступни показан в положении, которое соответствует дорсальному разгибанию голеностопного сустава пациента. В этом положении несущая часть 60 также скользит по монтажному основанию 68, как это показано стрелкой 71, и опорная площадка 66 для ступни поворачивается, как это показано стрелкой 70, что соответствует подъему носка ступни.
Другие типы движения также могут быть обеспечены механизмом для ступни, показанным на фигурах 12А-12С.
Следует отметить, что такой механизм движения ступни может быть пассивным механизмом, то есть его перемещения могут вызываться, например, действием механизма движения ног, в результате чего механизм для ступни будет подтягиваться или отталкиваться, или же в нем могут использоваться активные компоненты, такие как, например, электродвигатели, для активного управления механизмом движения ступни, например его движениями, как это было описано со ссылками на фигуры 12А-12С. В таком случае управление механизмом движения ступни также может осуществляться блоком управления 50, указанным на фигуре 11, синхронно с механизмом движения ноги.
Следует отметить, что шарниры 63, 65 соединений могут быть выполнены таким образом, чтобы можно было зафиксировать механизм движения ступни в нужном положении. Кроме того, может быть обеспечен один или несколько упругих упоров, например пружинных упоров, для обеспечения плавного торможения с ослаблением силы, действующей на ступню, когда опорная площадка 66 для ступни достигает одного из своих крайних положений, например положения, показанного на фигуре 12В. Такие силы, действующие на ступню, могут обеспечивать дополнительную стимуляцию.
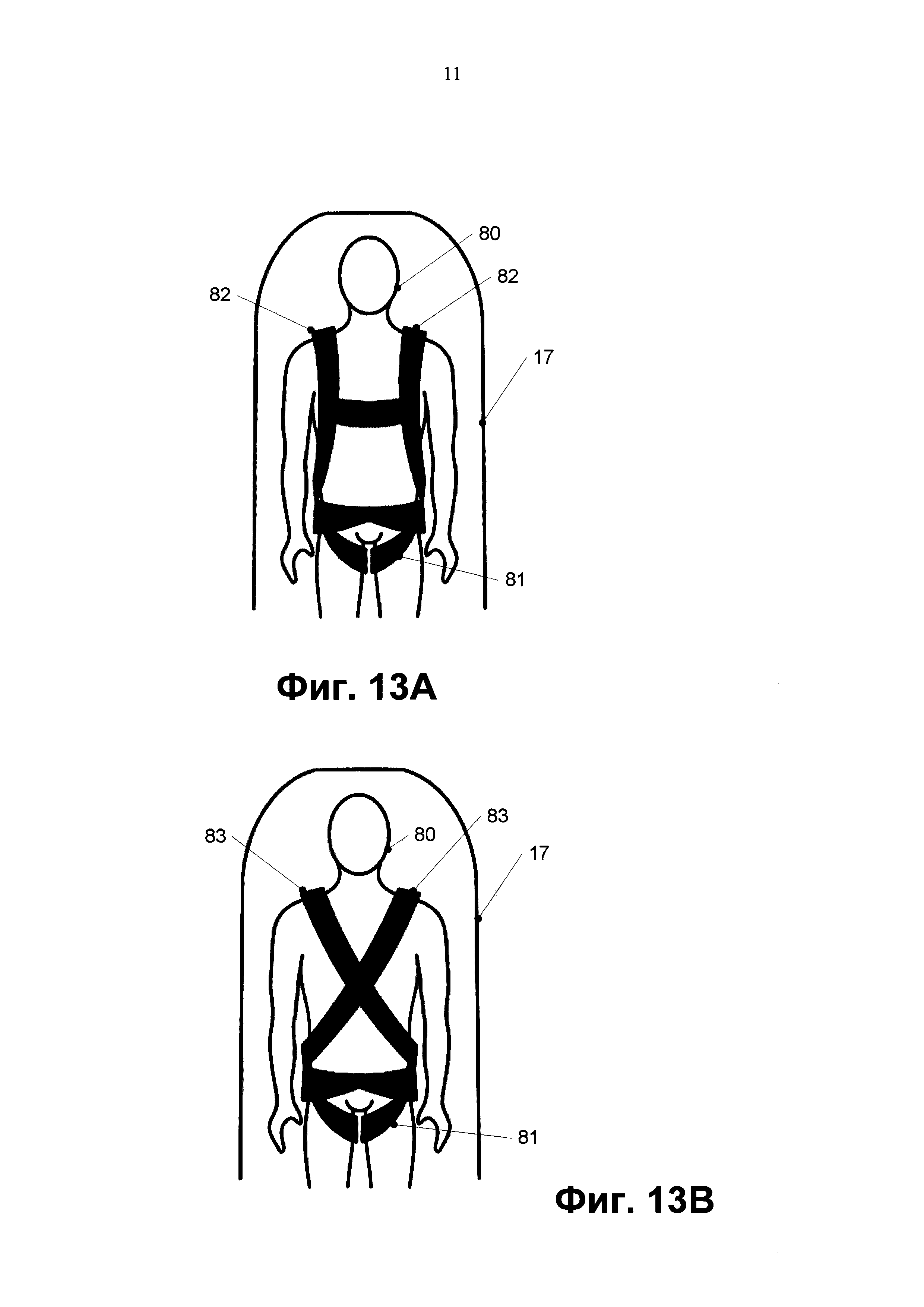
Для фиксации пациента на устройстве, показанном на фигурах 1-12, могут использоваться различные технические средства. Например, пациент может быть зафиксирован на устройстве с помощью ремней, как это описано в вышеуказанном документе ЕР 1169003 В1, где пациент по существу подвешен на устройстве. Другие возможности фиксации, используемые в некоторых вариантах, показаны на фигурах 13А и 13В. В данном случае пациент фиксируется на устройстве, в частности на второй части 17 стола, с помощью тазобедренных ремней 81. Такие ремни непосредственно прикреплены к устройству, например, ко второй части 17 стола. Также могут обеспечиваться плечевые ремни для предотвращения смещения корпуса пациента. Например, на фигуре 13А показаны прямые плечевые ремни 82 для фиксации пациента 30, в то время как на фигуре 13В показаны перекрещивающиеся плечевые ремни 83.
В дополнение к этим фиксирующим средствам, которые обеспечивают фиксацию в целом корпуса пациента 80 на устройстве, устройство может быть снабжено дополнительными средствами для фиксации определенных частей тела. Например, ноги могут быть зафиксированы в механизме движения ног, ступни могут быть зафиксированы в механизме движения ступней, и/или может быть дополнительно зафиксирована голова пациента, что может быть особенно полезно при выполнении упражнений, когда пациент находится в вертикальном положении. Для такой фиксации могут использоваться, например, ремни на "липучках" или им подобные фиксирующие средства. Кроме того, для обеспечения комфорта для пациентов и предотвращения повреждений, вызванных жесткими ремнями, могут использоваться амортизирующие прокладки.
Фиксирующие ремни, показанные на фигурах 13А и 13В, могут использоваться не только в вышеописанных вариантах, но также и других устройствах.
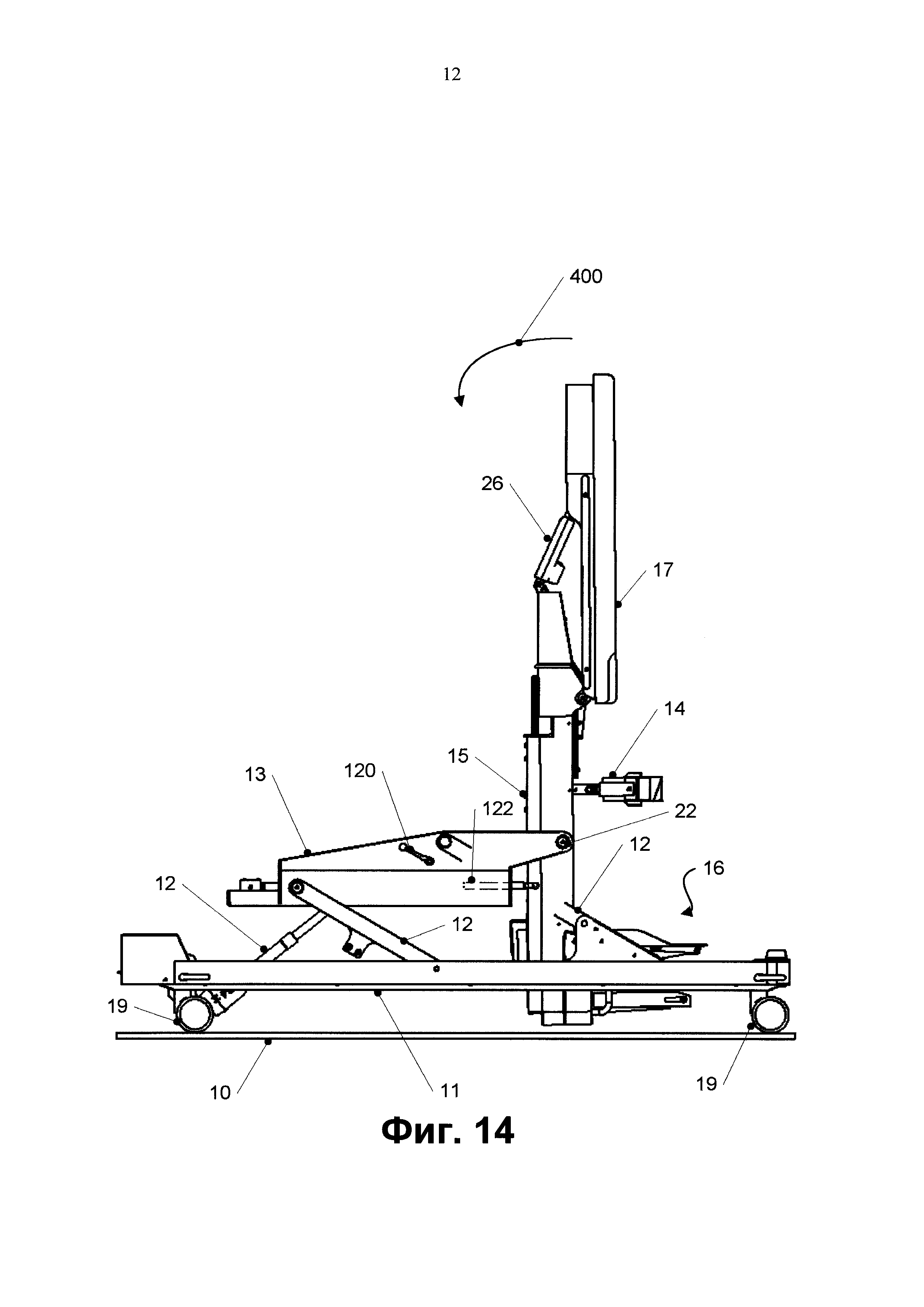
В некоторых вариантах может обеспечиваться аварийный механизм опускания, который может использоваться для опускания первой 15 и второй 17 частей стола и соответственно пациента из вертикального или наклонного положения в горизонтальное положение, как показано на фигуре 1, даже если приводы, используемые для наклона (или подъема), не работают, например, при отключении питания. Такой механизм схематически показан на фигуре 14. Вариант устройства, показанный на фигуре 14, соответствует варианту, уже описанному со ссылками на фигуры 1-5, и ниже описываются введенные в него дополнительные элементы. Подъемный механизм 12 показан на фигуре 14 лишь частично, чтобы он не заслонял показанный аварийный механизм опускания.
Для осуществления аварийного опускания пациента из вертикального положения, показанного на фигуре 14, сотрудник, например врач, контролирующий выполнение упражнений, поворачивает рычаг 120. Для инициирования движения из вертикального положения обеспечивается газовый цилиндр 122 или аналогичный приводной механизм, предпочтительно не электрический. Когда начинается движение в направлении, показанном на фигуре 14 стрелкой 400, и первая 15 и вторая 17 части находятся в наклонном положении, так что центр тяжести пациента будет находиться слева от оси 22, и вес пациента будет поддерживать его перемещение в горизонтальное положение. Чтобы это движение не становилось слишком быстрым, приводные механизмы, используемые в нормальном режиме работы устройства для его наклона, например привод 300 на фигуре 3, могут тормозить движение, или могут быть обеспечены дополнительные демпфирующие устройства. Для обеспечения такого движения приводные механизмы, такие как привод 300, могут быть выполнены таким образом, чтобы движение могло осуществляться и при отключении электропитания.
Другие дополнительные (необязательные) признаки некоторых вариантов показаны на фигурах 15 и 16. На фигуре 15 показан вид в перспективе устройства по одному из вариантов с первой частью 15 стола, наклоненной под углом примерно 60 градусов к горизонтали, и на фигуре 16 эта часть находится в горизонтальном положении. Основой варианта, показанного на фигурах 15 и 16, является вариант, показанный на фигурах 1-5, поэтому ниже будут описаны только дополнительные признаки.
В дополнение к уже описанным признакам вариант, показанный на фигурах 15 и 16, содержит подлокотники 130. В некоторых вариантах руки пациента могут быть зафиксированы на подлокотниках 130 с помощью ремней, креплений с "липучками" и аналогичных устройств.
Кроме того, вариант, показанный на фигурах 15 и 16, содержит панель 131 для контроля и/или управления работой устройства. Панель 131 может содержать сенсорный экран, с помощью которого можно вводить информацию и управлять работой устройства и на который может выводиться информация о состоянии устройства и/или о выполняемых упражнениях. Например, на экране могут отображаться графики, приведенные на фигуре 8. В других вариантах панель 131 может содержать традиционный дисплей и другие элементы ввода информации, такие как, например, клавиатура. В других вариантах панель 131 может быть установлена в других местах устройства. В других вариантах панель 131 может отсутствовать, и управление работой устройства может осуществляться с помощью удаленного средства, такого как компьютер или портативный аппарат, по линии проводной или беспроводной связи. Еще в некоторых вариантах может использоваться и панель, и удаленное средство управления.
В настоящем описании были рассмотрены некоторые варианты осуществления изобретения, которые являются лишь примерами практической реализации изобретения, и они не должны рассматриваться как ограничения его объема.
Реферат
Изобретение относится к медицине. Устройство для терапии двигательной активности включает основание, первую часть стола, механизм наклона, механизм для ступней, механизм движения ног и вторую часть стола. Механизм наклона соединяет основание с указанной первой частью стола и обеспечивает ее наклон между горизонтальным положением и вертикальным положением. Механизм для ступней установлен на первой части стола для размещения на нем ступней пациента. Механизм движения ног выполнен для обеспечения движения ног пациента. Вторая часть стола соединена с первой частью стола, так что вторая часть стола соединена с механизмом наклона только посредством первой части стола. Вторую часть стола можно регулировать относительно первой части стола для подгонки устройства под пациентов разного роста. Изобретение обеспечивает положение пациента в вертикальном положении устройства на достаточно небольшой высоте. 14 з.п. ф-лы, 16 ил.
Формула
Документы, цитированные в отчёте о поиске
Тренажер для разработки и укрепления позвонковых суставов, опорно-двигательного аппарата и исправления осанки и его варианты
Комментарии