Система обучения ходьбе - RU2636876C2
Код документа: RU2636876C2
Чертежи









Описание
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к системе обучения ходьбе, а конкретнее к системе обучения ходьбе, которая содержит транспортер, на котором ходит обучаемый, и пару опор, на которых помощник ставит ноги, по одной на каждую опору.
Уровень техники
[0002] Публикация заявки на патент Японии №2011-50451 (JP 2011-50451 А) раскрывает технологию, которая может измерять данные о ходьбе в состоянии ходьбы во время обучения ходьбе пользователя без необходимости ношения специального измерительного устройства. Устройство восстановления ходьбы, раскрытое в Публикации заявки на патент Японии №2011-50451 (JP 2011-50451 А), включает в себя пару лент, правую и левую, на которые пользователь ставит ноги. Это устройство восстановления ходьбы дополнительно включает в себя блок обнаружения и блок измерения данных о ходьбе. Блок обнаружения с заранее установленным интервалом времени обнаруживает значение электрического тока, который течет в двигателе для приведения в движение каждой из пары правой и левой лент. Блок измерения данных о ходьбе проверяет значение электрического тока, обнаруженное блоком обнаружения, чтобы определить, стоят или двигаются ноги пользователя, и отображает результат определения на мониторе в виде графика.
[0003] Однако устройство восстановления ходьбы, раскрытое в публикации заявки на патент Японии №2011-50451 (JP 2011-50451 А), содержит проблему в том, что устройство не может обнаруживать состояние, в котором обучаемый не может хорошо ходить и сходит с ленты. То есть проблема с устройством восстановления ходьбы, раскрытым в публикации заявки на патент Японии №2011-50451 (JP 2011-50451 А), состоит в том, что устройство не может обнаружить аномальное состояние, которое может формироваться во время обучения ходьбе.
Раскрытие изобретения
[0004] Технический результат, достигаемый при использовании настоящего изобретения, заключается в повышении точности определения состояния потери равновесия у обучаемого или помощника во время обучения ходьбе. Цель настоящего изобретения - предоставить систему обучения ходьбе, которая может обнаружить аномальное состояние во время обучения ходьбе.
[0005] В соответствии с первым аспектом настоящего изобретения система обучения ходьбе включает в себя ленточный транспортер, на котором ходит обучаемый, пару опор, датчик и управляющее устройство. Пара опор располагается на обеих сторонах ленточного транспортера, по одной опоре на каждой стороне. Помощник может поставить каждую ногу на опоры. Датчик конфигурируется для измерения состояния наличия ноги на опоре. Управляющее устройство конфигурируется для определения на основе результата измерения от датчика, находятся ли на опоре три ноги или более. Управляющее устройство конфигурируется для выполнения управления в аномальном случае, если определяется, что находятся три ноги или более.
[0006] В соответствии с этой конфигурацией можно обнаружить ситуацию, в которой обучаемый теряет равновесие во время ходьбы и уходит с транспортера. То есть можно обнаружить аномальное состояние во время обучения ходьбе.
[0007] В вышеупомянутом аспекте датчик может измерять нагрузку от ноги на опору. Управляющее устройство может конфигурироваться для определения, что на опоре находится нога, когда датчик измеряет нагрузку.
[0008] В соответствии с этой конфигурацией можно реализовать устойчивую к загрязнению, недорогую систему по сравнению со случаем, в котором определение выполняется на основе результата оптического измерения.
[0009] В вышеупомянутом аспекте датчик может измерять распределение нагрузки от ноги на опору. Управляющее устройство может конфигурироваться для определения, что находятся две ноги, если длина между двумя распределениями нагрузки больше заранее установленной длины. Управляющее устройство может конфигурироваться для определения, что находится одна нога, если длина между двумя распределениями нагрузки меньше либо равна заранее установленной длине.
[0010] В соответствии с этой конфигурацией, когда два распределения нагрузки обнаруживаются для одной ноги помощника, можно предотвратить ситуацию, в которой два распределения нагрузки определяются неправильно как два распределения нагрузки, одно для распределения нагрузки от ноги обучаемого, а другое для распределения нагрузки от ноги помощника.
[0011] В вышеупомянутом аспекте датчик может включать в себя множество датчиков нагрузки, каждый из которых измеряет распределение нагрузки от ноги на опору. Множество датчиков нагрузки можно разместить близко друг к другу на опоре в заранее установленной области на стороне в направлении, противоположном направлению перемещения обучаемого.
[0012] В соответствии с этой конфигурацией можно уменьшить количество датчиков 201 нагрузки и поэтому можно снизить стоимость.
[0013] В вышеупомянутом аспекте датчик может включать в себя двухпозиционный датчик. Двухпозиционный датчик включается, когда ставят ногу, и выключается, когда ногу не ставят, на участке вне области, в которой на опоре размещается множество датчиков нагрузки. Управляющее устройство может конфигурироваться для определения, что на опоре находятся три ноги или более, когда на основе результата измерения от множества датчиков нагрузки определяется, что на опоре находятся две ноги, и если двухпозиционный датчик включается.
[0014] В соответствии с этой конфигурацией может использоваться недорогой двухпозиционный датчик для снижения стоимости.
[0015] В вышеупомянутом аспекте датчик может включать в себя множество фотоэлектронных датчиков. Фотоэлектронные датчики могут следить за границей между ленточным транспортером и опорой. Управляющее устройство может конфигурироваться для определения, что на опоре находится нога, если фотоэлектронными датчиками обнаруживается перекрытие света.
[0016] В соответствии с этой конфигурацией можно обнаружить аномальное состояние во время обучения ходьбе с помощью датчика, помимо датчика нагрузки.
[0017] В вышеупомянутом аспекте управляющее устройство может конфигурироваться для определения, что находятся две ноги, когда длина перекрытого света больше заранее установленной длины. Управляющее устройство может конфигурироваться для определения, что находится одна нога, когда длина перекрытого света меньше либо равна заранее установленной длине.
[0018] В соответствии с этой конфигурацией можно предотвратить ситуацию, в которой перекрытие света ногой обучаемого и ногой помощника неправильно определяется как перекрытие света одной ногой помощника.
[0019] В вышеупомянутом аспекте датчик может включать в себя по меньшей мере одну камеру, которая снимает опору. Управляющее устройство может конфигурироваться для определения, что на опоре находится нога, когда нога распознается путем анализа изображения, сформированного с помощью съемки камерой.
[0020] В соответствии с этой конфигурацией можно обнаружить аномальное состояние во время обучения ходьбе с помощью датчика помимо датчика нагрузки.
[0021] В вышеупомянутом аспекте управляющее устройство может замедлить ленточный транспортер в качестве управления в аномальном случае. К тому же, управляющее устройство может остановить ленточный транспортер.
[0022] В соответствии с этой конфигурацией обучаемый может без труда восстановить равновесие.
[0023] В соответствии с другим аспектом система обучения ходьбе включает в себя ленточный транспортер, на котором ходит обучаемый, пару опор, датчик и управляющее устройство. Пара опор располагается на обеих сторонах ленточного транспортера, по одной опоре на каждой стороне. Помощник может поставить каждую ногу на опоры. Датчик конфигурируется для измерения состояния наличия ноги на ленточном транспортере. Управляющее устройство может конфигурироваться для определения на основе результата измерения от датчика, находятся ли на ленточном транспортере три ноги или более. Управляющее устройство выполняет управление в аномальном случае, если определяется, что находятся три ноги или более.
[0024] В соответствии с описанными выше аспектами настоящего изобретения можно обнаружить аномальное состояние во время обучения ходьбе.
Краткое описание чертежей
[0025] Признаки, преимущества и техническое и промышленное значение примерных вариантов осуществления изобретения будут описываться ниже со ссылкой на прилагаемые чертежи, на которых одинаковые цифры обозначают одинаковые элементы и на которых:
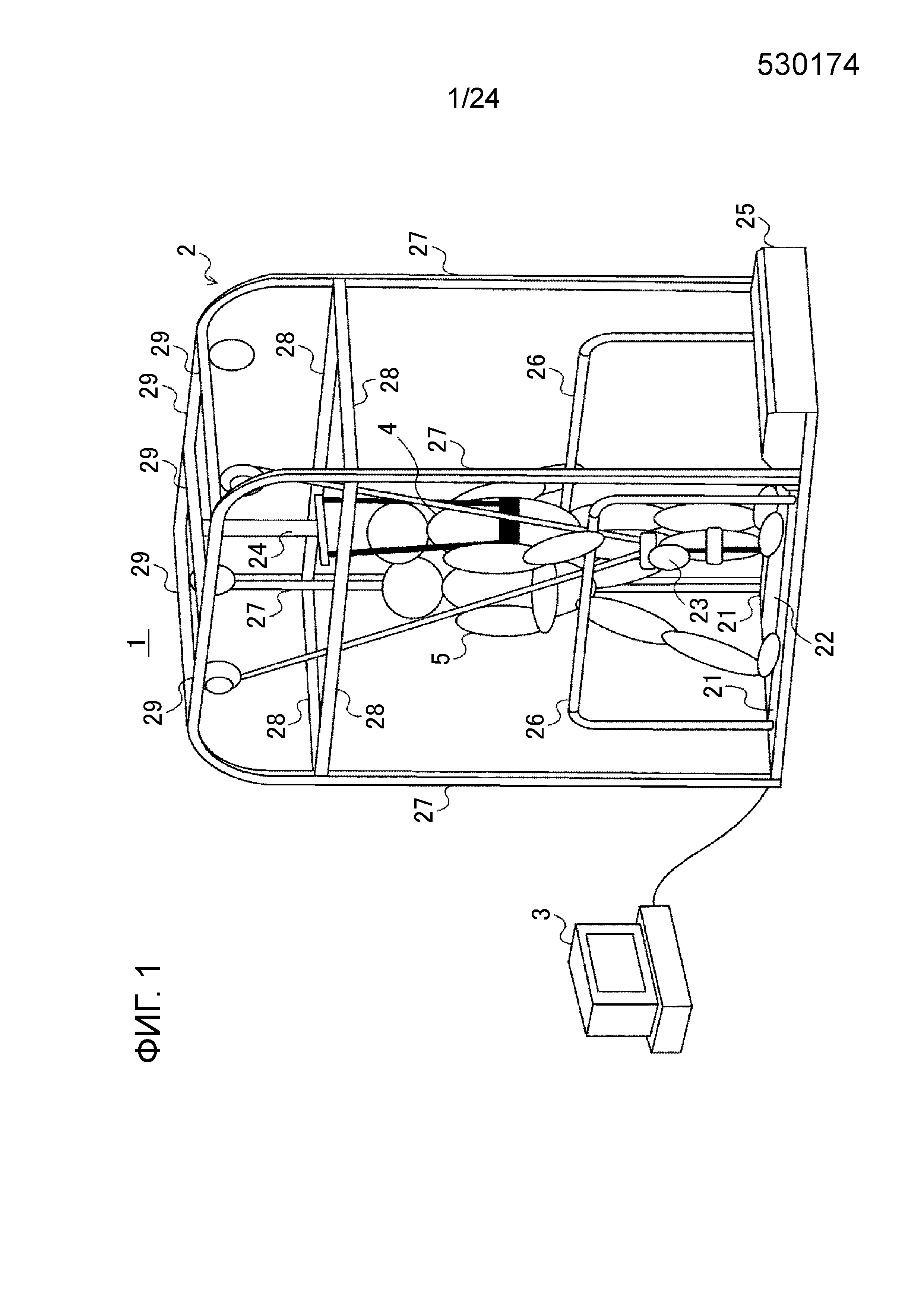
Фиг. 1 - схема, показывающая конфигурацию системы обучения ходьбе в первом варианте осуществления;
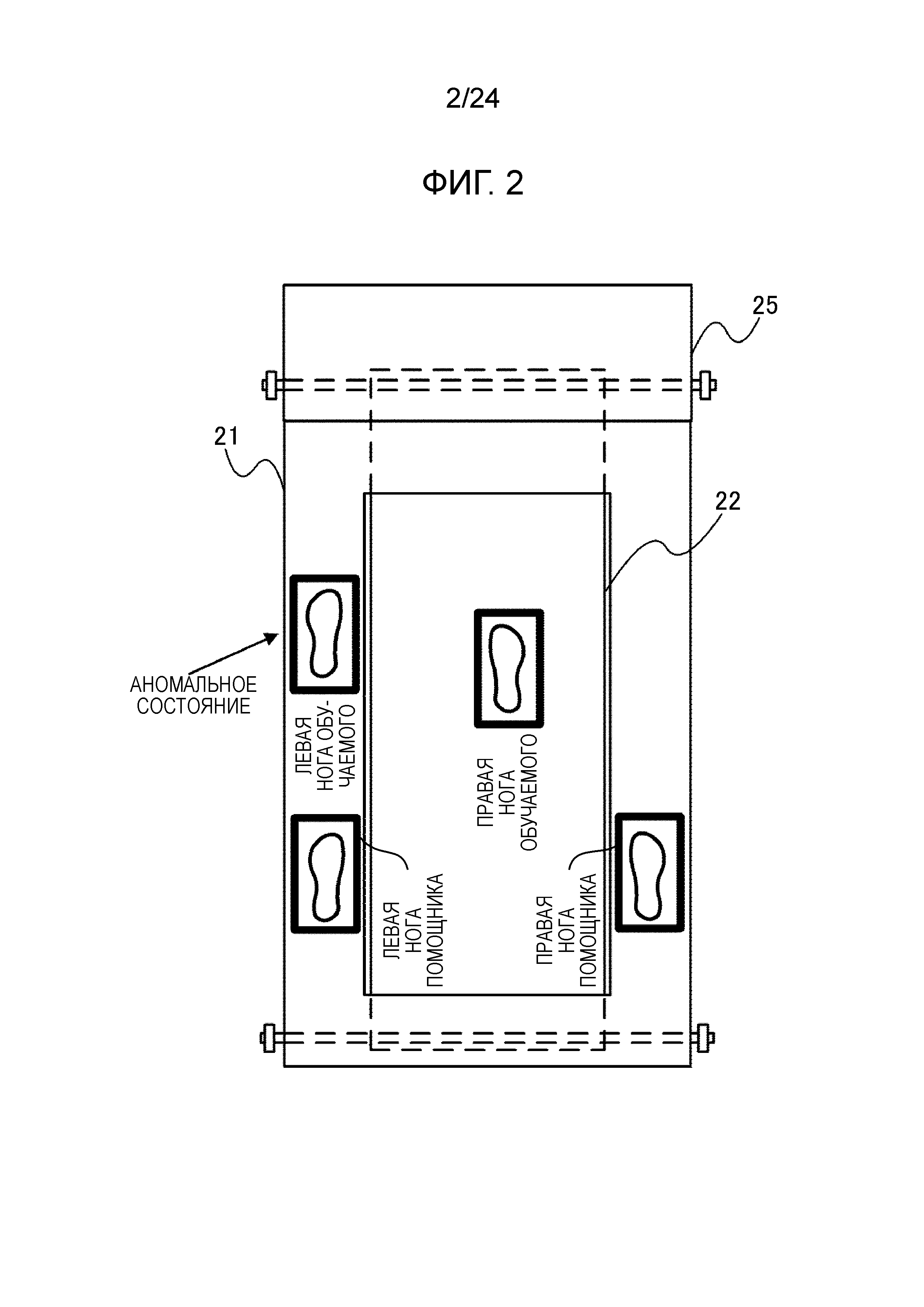
Фиг. 2 - вид сверху, показывающий опору и транспортер в первом варианте осуществления;
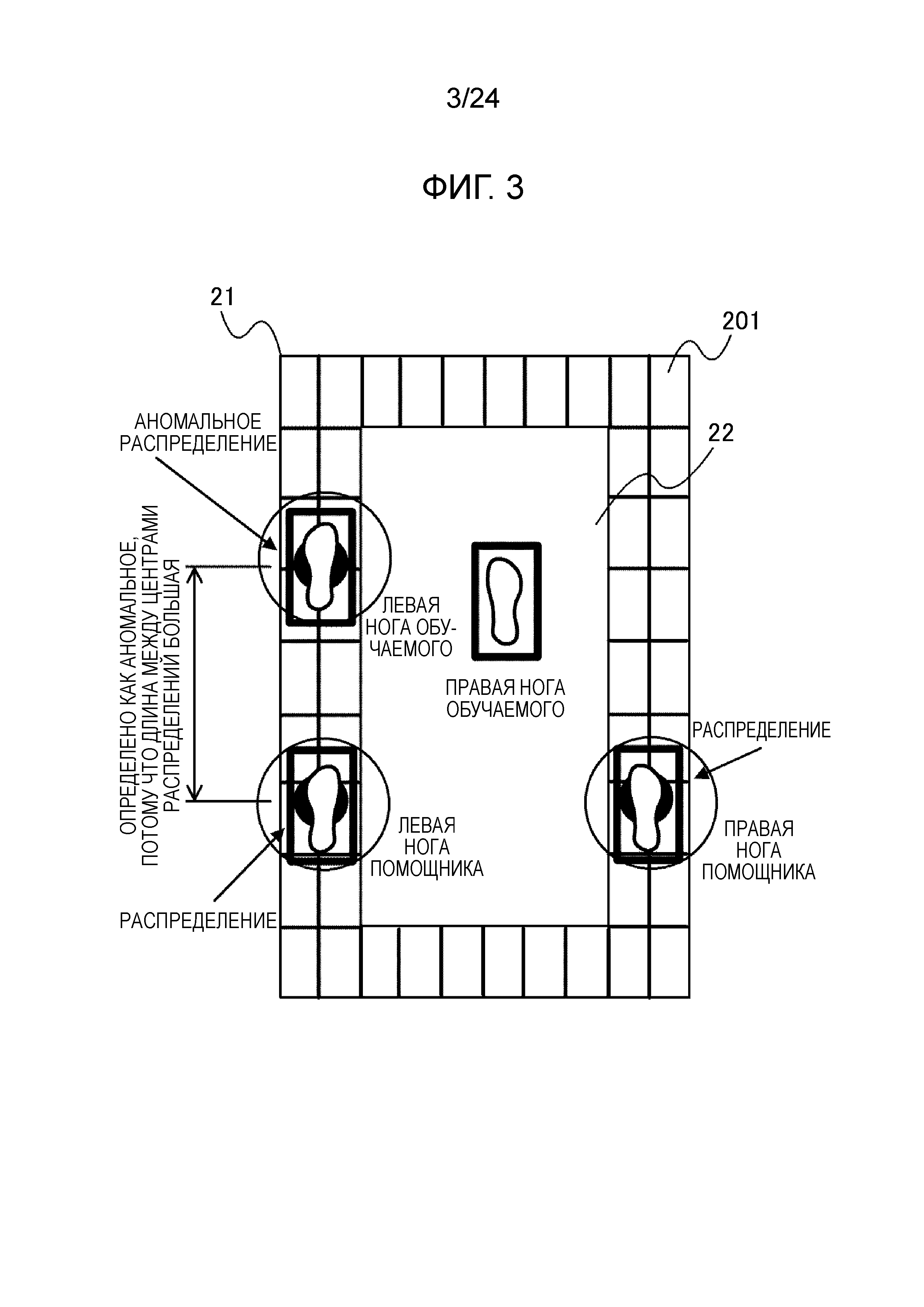
Фиг. 3 - схема, показывающая первый способ определения в первом варианте осуществления;
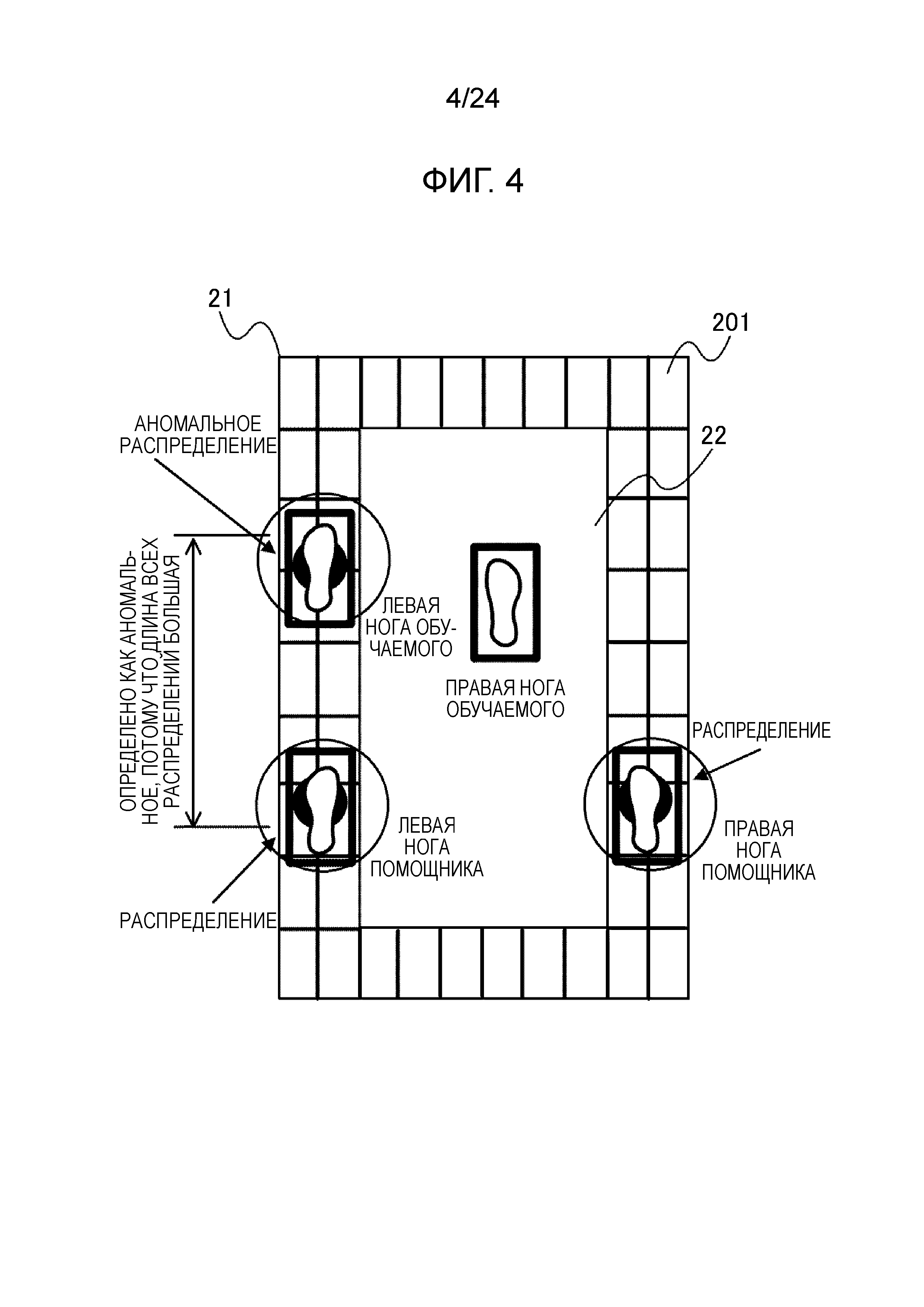
Фиг. 4 - схема, показывающая второй способ определения в первом варианте осуществления;
Фиг. 5 - схема, показывающая конфигурацию управляющей системы в системе обучения ходьбе в первом варианте осуществления;
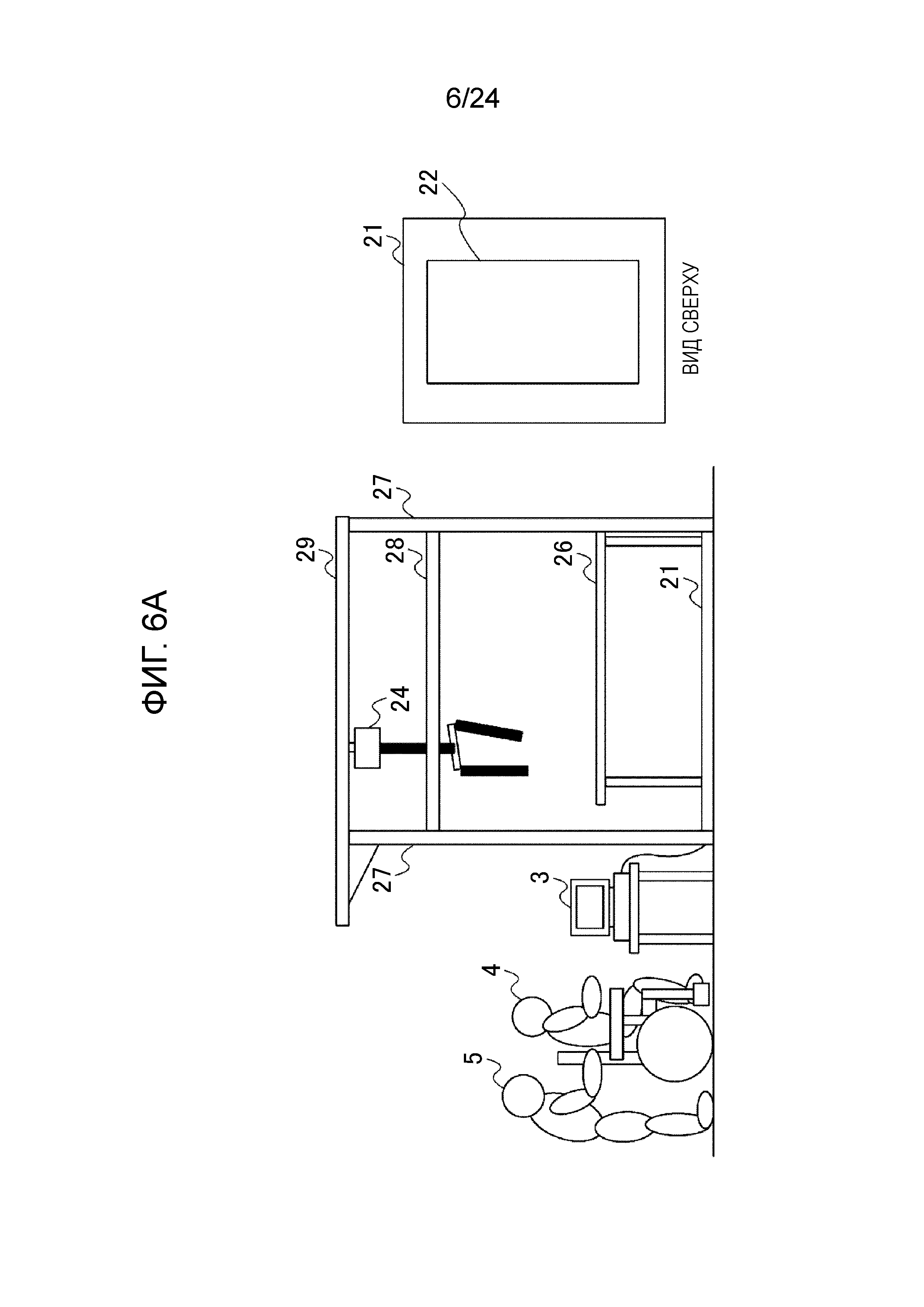
Фиг. 6A - схема, показывающая процедуру обучения ходьбе в первом варианте осуществления;
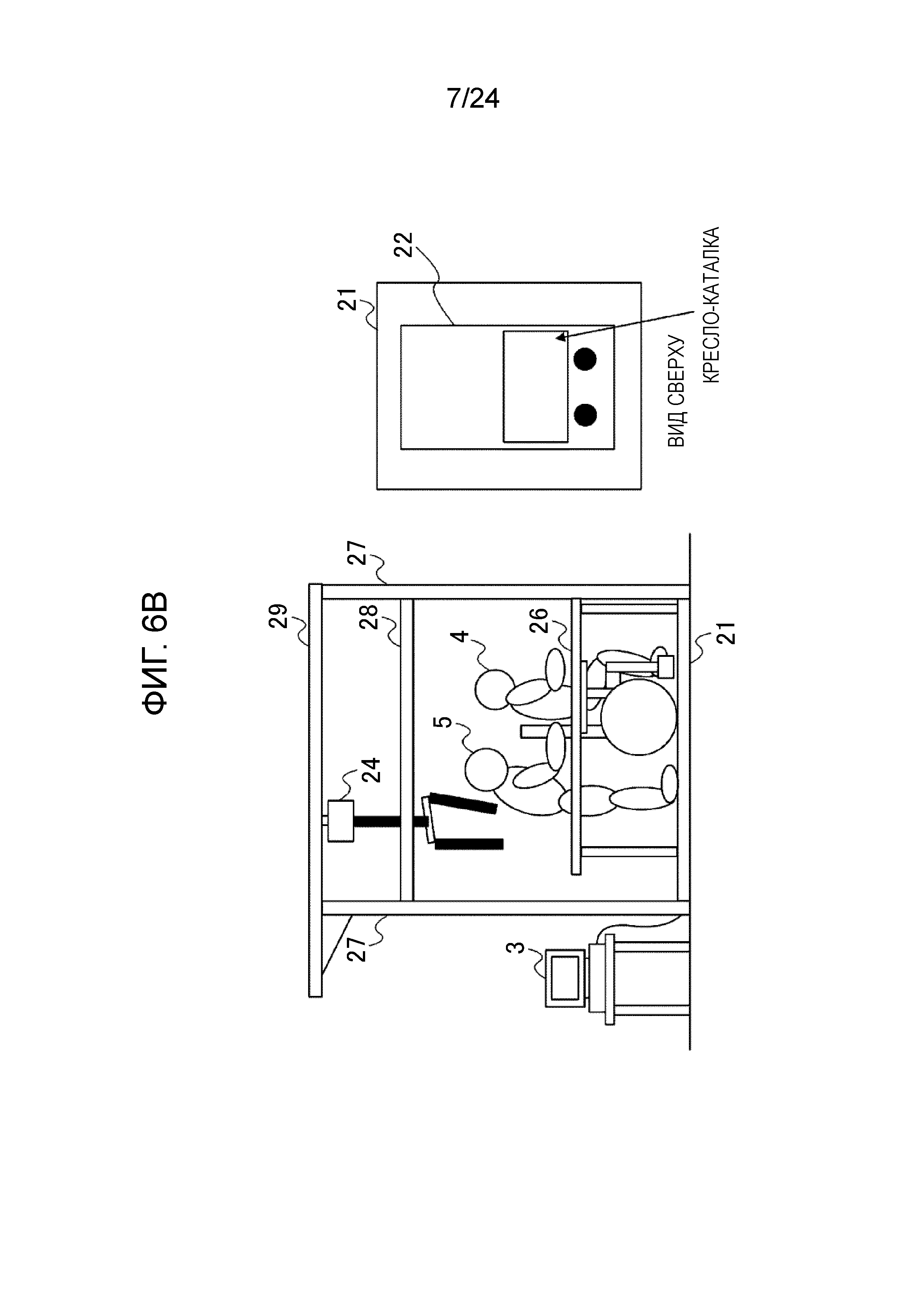
Фиг. 6B - схема, показывающая процедуру обучения ходьбе в первом варианте осуществления;
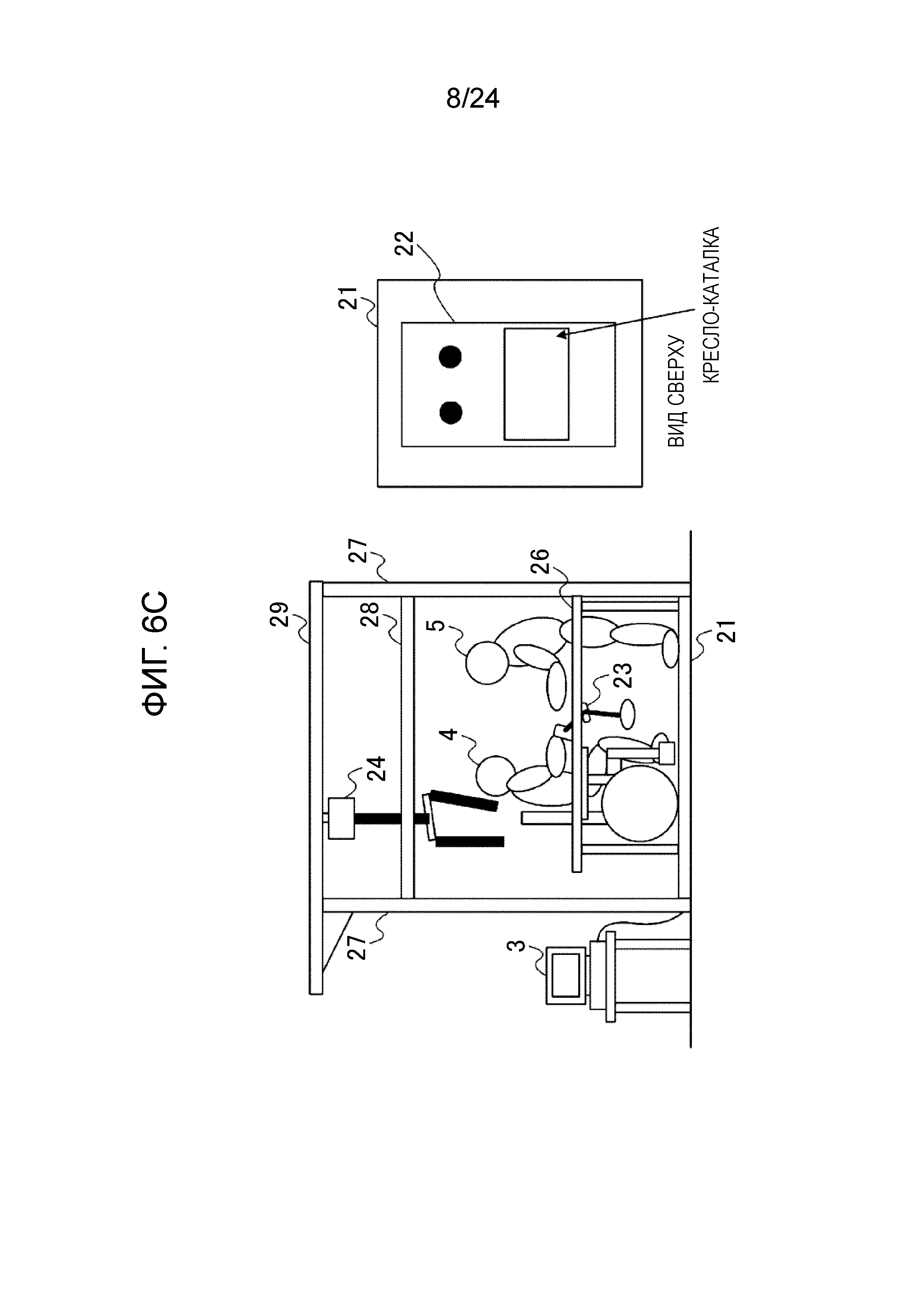
Фиг. 6C - схема, показывающая процедуру обучения ходьбе в первом варианте осуществления;
Фиг. 6D - схема, показывающая процедуру обучения ходьбе в первом варианте осуществления;
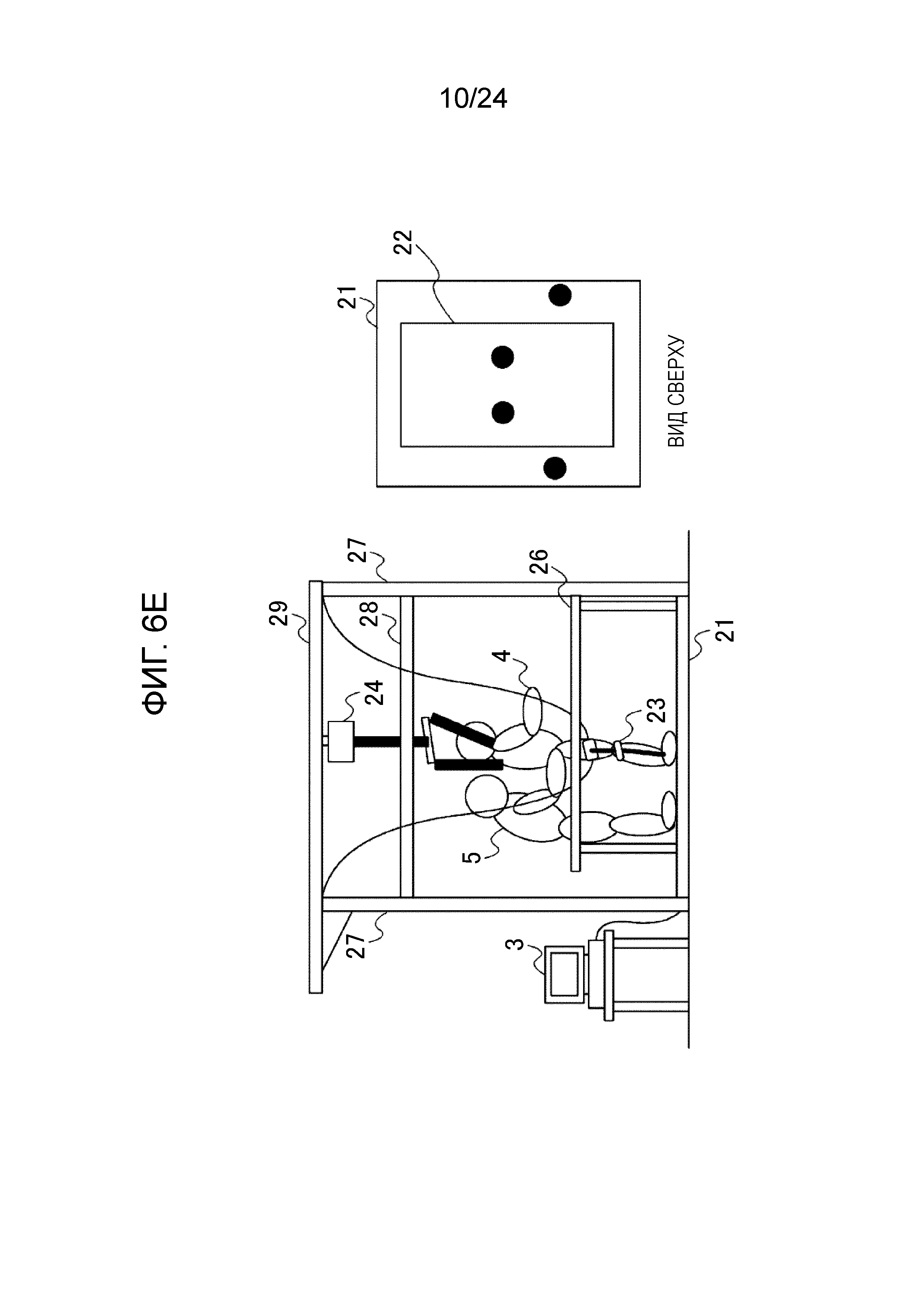
Фиг. 6E - схема, показывающая процедуру обучения ходьбе в первом варианте осуществления;
Фиг. 7 - блок-схема алгоритма, показывающая обработку в системе обучения ходьбе в первом варианте осуществления;
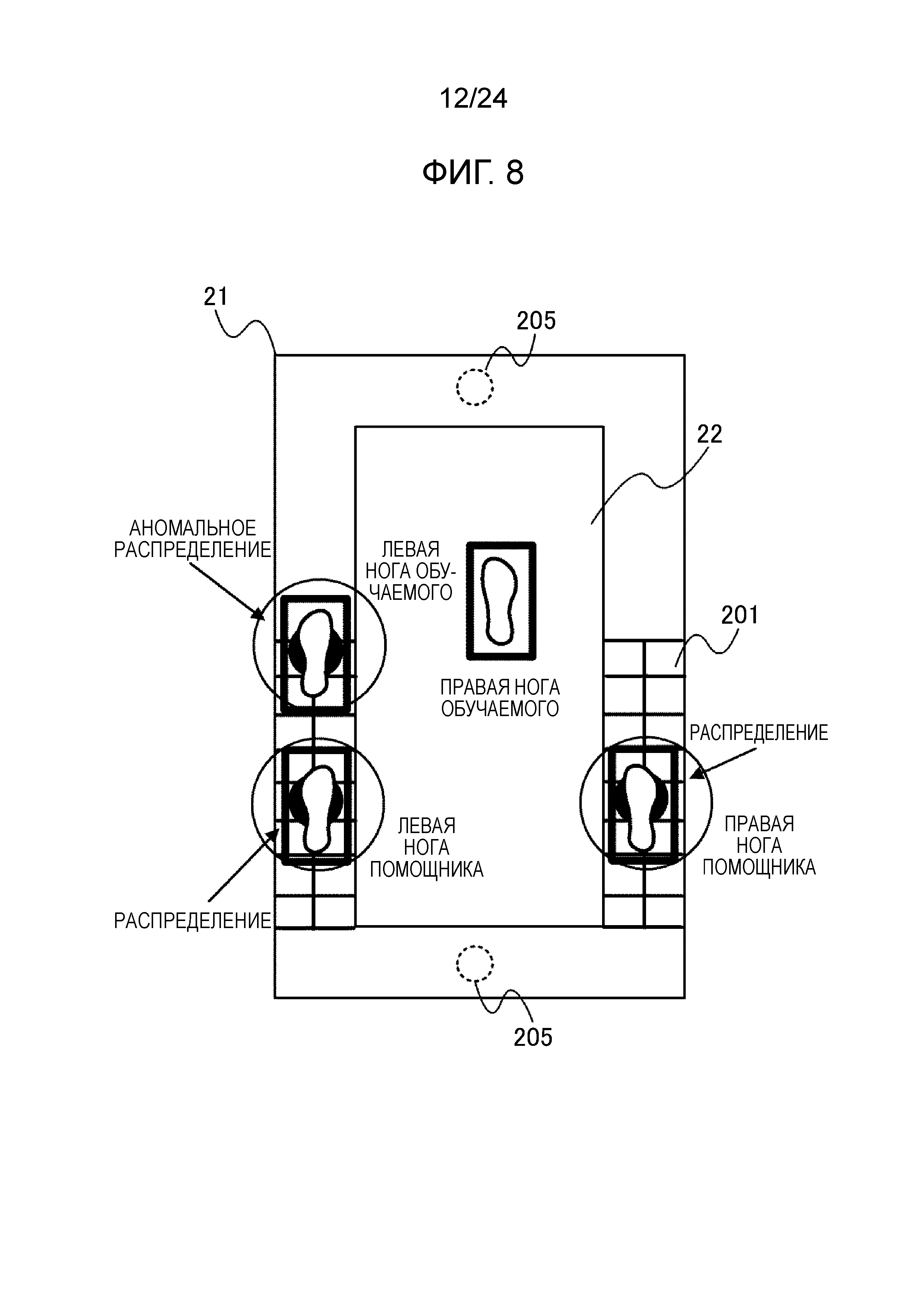
Фиг. 8 - вид сверху, показывающий опору и транспортер во втором варианте осуществления;
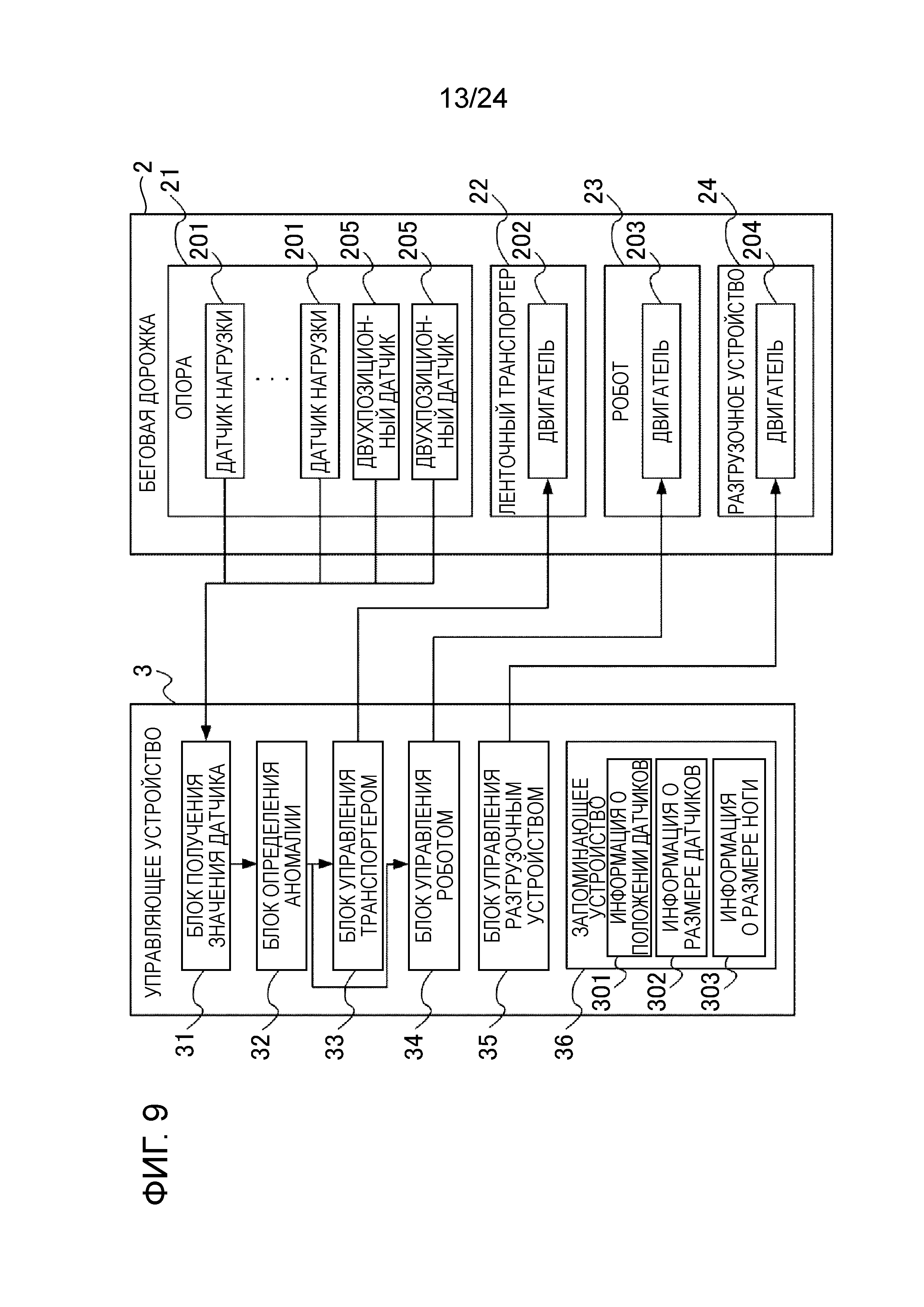
Фиг. 9 - схема, показывающая конфигурацию управляющей системы в системе обучения ходьбе во втором варианте осуществления;
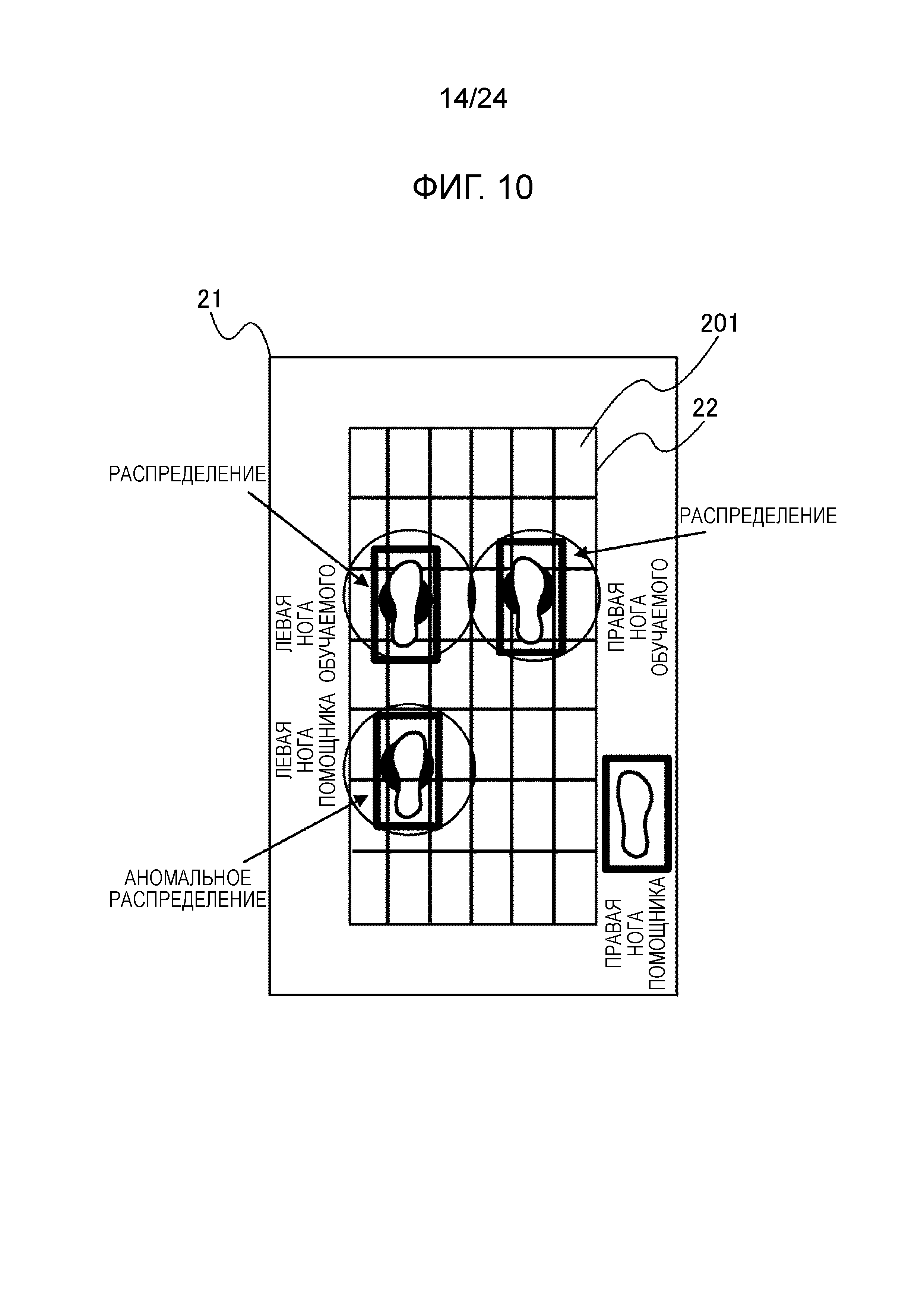
Фиг. 10 - вид сверху, показывающий опору и транспортер в третьем варианте осуществления;
Фиг. 11 - схема, показывающая конфигурацию системы обучения ходьбе в четвертом варианте осуществления;
Фиг. 12 - вид сверху, показывающий опору и транспортер в четвертом варианте осуществления;
Фиг. 13 - схема, показывающая пример, в котором перекрывается линия наблюдения инфракрасного датчика, в четвертом варианте осуществления;
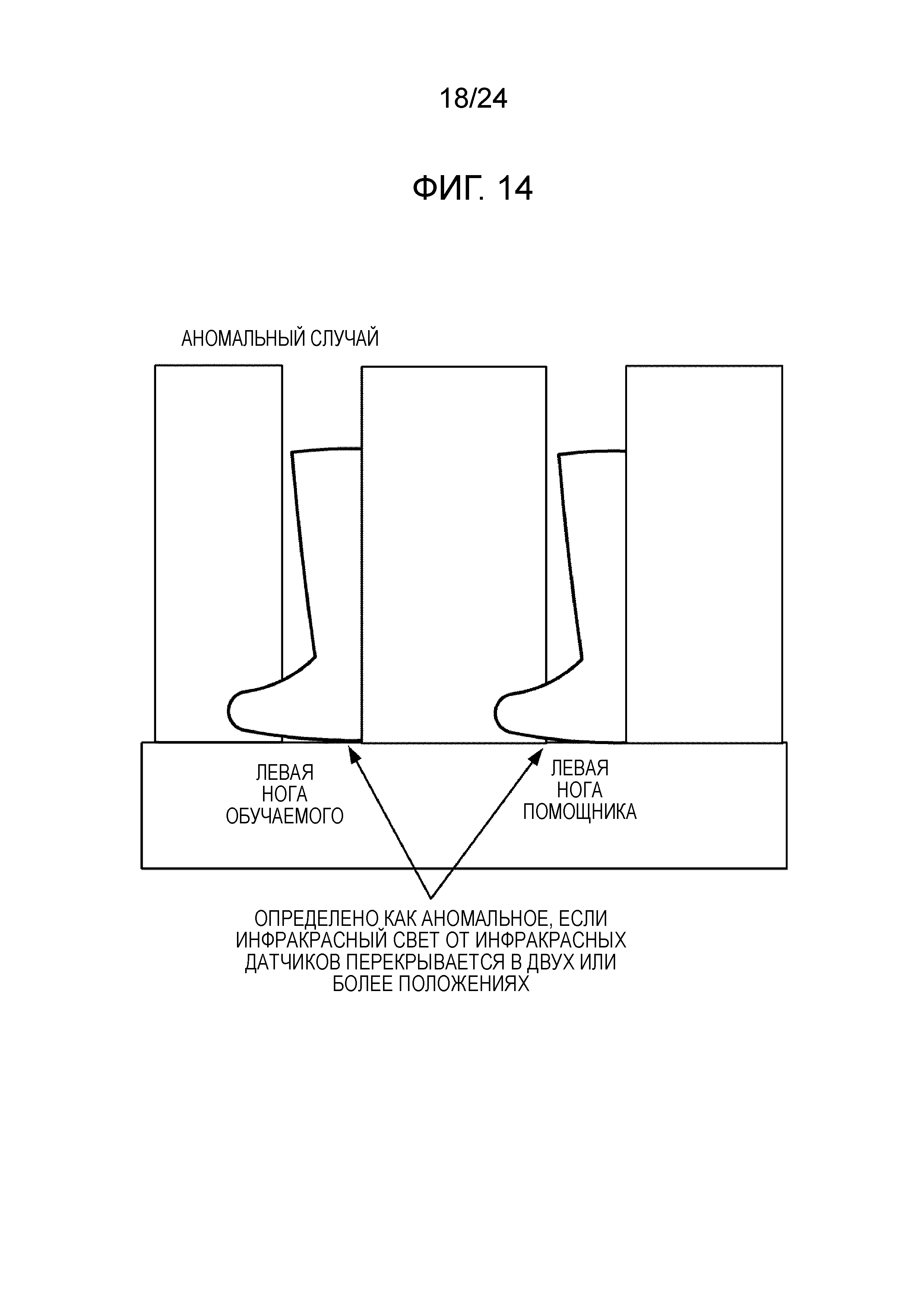
Фиг. 14 - схема, показывающая пример, в котором перекрывается линия наблюдения инфракрасного датчика, в четвертом варианте осуществления;
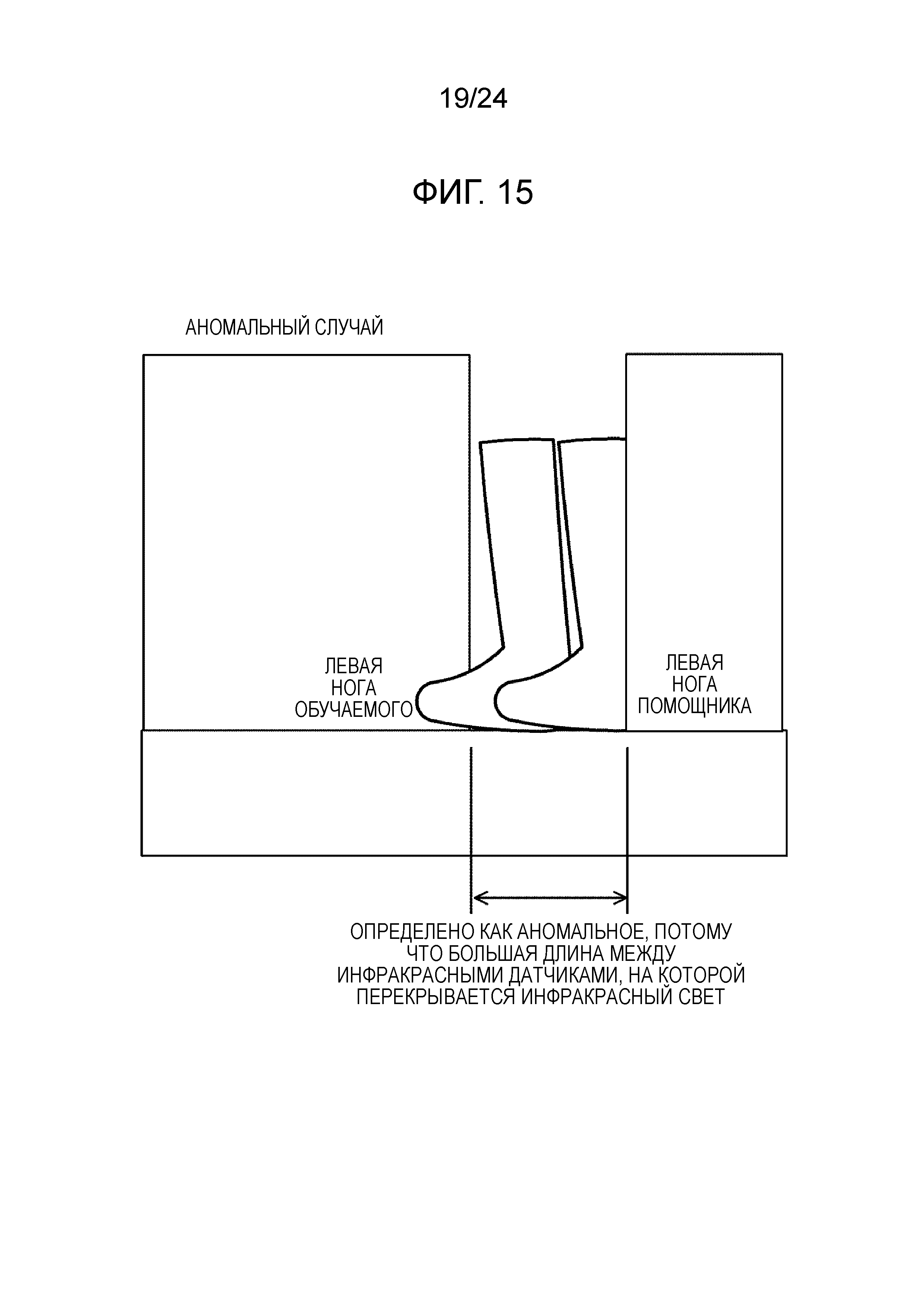
Фиг. 15 - схема, показывающая пример, в котором перекрывается линия наблюдения инфракрасного датчика, в четвертом варианте осуществления;
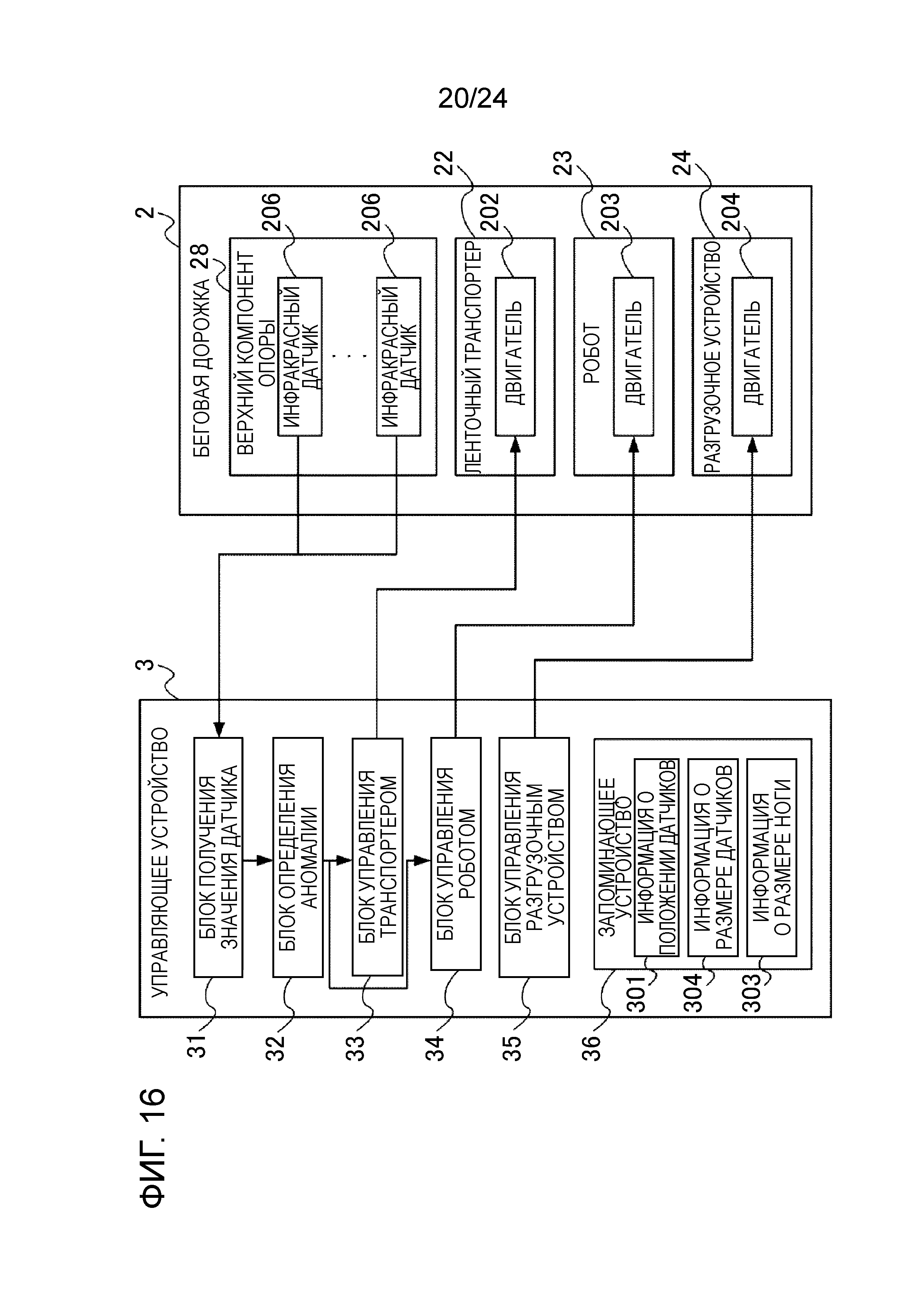
Фиг. 16 - схема, показывающая конфигурацию управляющей системы в системе обучения ходьбе в четвертом варианте осуществления;
Фиг. 17 - схема, показывающая конфигурацию системы обучения ходьбе в пятом варианте осуществления;
Фиг. 18 - вид сверху, показывающий опору и транспортер в пятом варианте осуществления;
Фиг. 19 - схема, показывающая конфигурацию управляющей системы в системе обучения ходьбе в пятом варианте осуществления; и
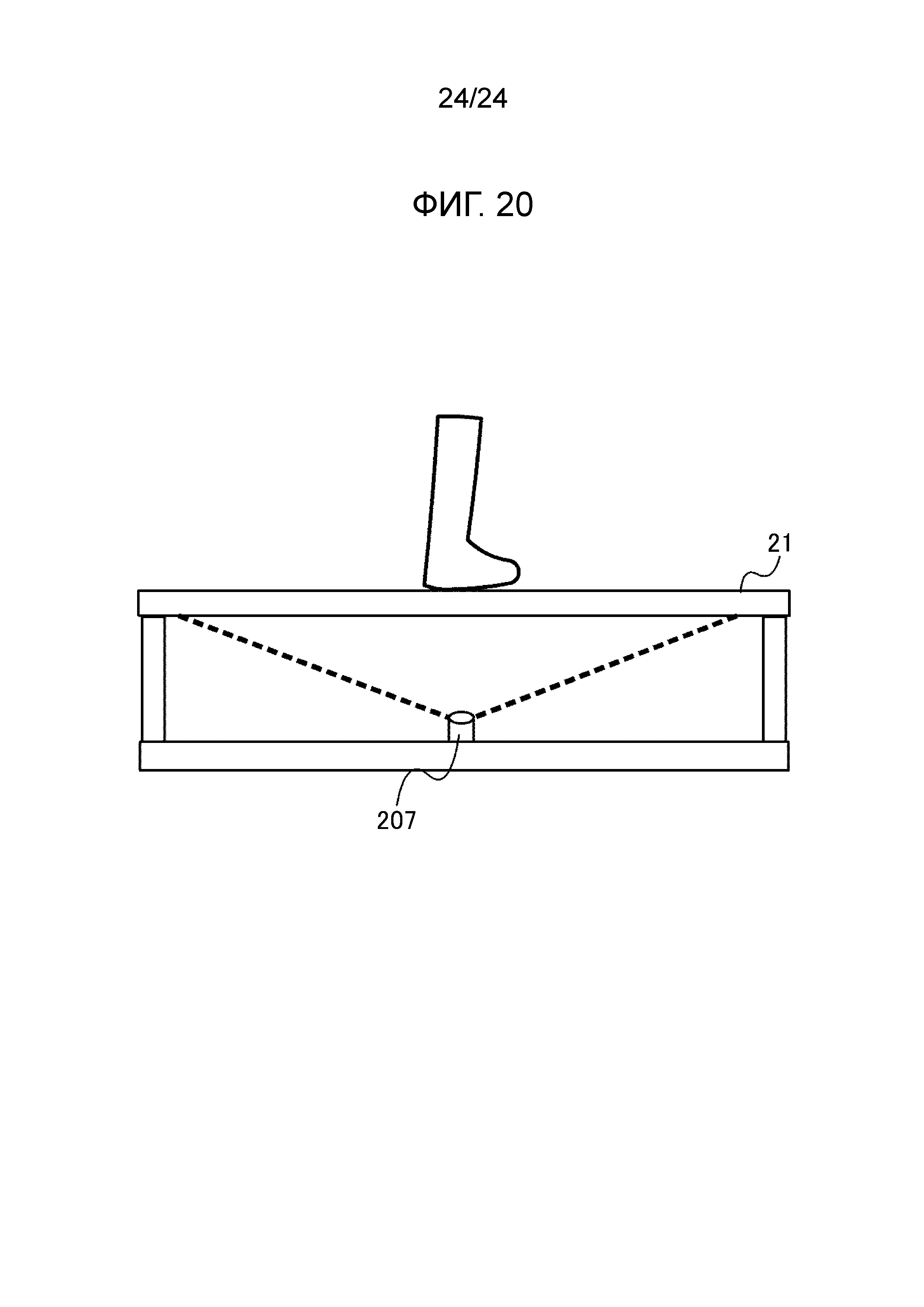
Фиг. 20 - схема, показывающая другой способ наблюдения в пятом варианте осуществления.
Осуществление изобретения
[0026] Ниже описываются предпочтительные варианты осуществления настоящего изобретения со ссылкой на чертежи. Конкретные числовые значения, показанные ниже в вариантах осуществления, являются лишь примерными для упрощения понимания настоящего изобретения, и значения не ограничиваются теми значениями, если не указано иное. К тому же, в описании и на чертежах ниже для краткости вопросы, очевидные специалистам в данной области техники, пропускаются или упрощаются по необходимости.
[0027] <Первый вариант осуществления настоящего изобретения>
Описывается первый вариант осуществления. Сначала ниже со ссылкой на фиг. 1 описывается конфигурация системы 1 обучения ходьбе в первом варианте осуществления. Как показано на фиг. 1, система 1 обучения ходьбе включает в себя беговую дорожку 2 и управляющее устройство 3.
[0028] Беговая дорожка 2 является устройством, на котором обучаемый 4 проходит обучение ходьбе. Беговая дорожка 2 функционирует в качестве устройства обучения ходьбе. Управляющее устройство 3 является устройством, которое управляет беговой дорожкой 2. Управляющее устройство 3 обычно является персональным компьютером (ПК). Однако управляющее устройство 3 не ограничивается персональным компьютером, также можно использовать другие устройства обработки информации, например планшетный терминал или смартфон.
[0029] Беговая дорожка 2 включает в себя опору 21, ленточный транспортер 22, робот 23, разгрузочное устройство 24, корпус 25 двигателя, пару поручней 26, множество вертикальных компонентов 27 опоры и множество верхних компонентов 28 и 29 опоры.
[0030] Опора 21 является частью, на которую ставит каждую свою ногу помощник 5, который помогает обучаемому 4 проходить обучение ходьбе. Опоры 21 функционируют в качестве подножки, на которую помощник 5 ставит каждую ногу. Опора 21 содержит по меньшей мере пару частей (правая часть опоры и левая часть опоры, которые будут описываться позже), размещенных на обеих сторонах ленточного транспортера 22, по одной на каждой стороне. Эта конструкция позволяет помощнику 5 удерживать и поддерживать обеими руками обучаемого 4, который ходит впереди помощника 5, стоя при этом на опоре 21 таким образом, что помощник 5 находится по обе стороны от ленточного транспортера 22. В этом варианте осуществления направление, в котором ходит обучаемый 4, называется направлением "вперед", а противоположное ему направление называется направлением "назад". Поэтому на фиг. 1 направление вправо является направлением "вперед", а направление влево является направлением "назад".
[0031] Ленточный транспортер 22 является частью, на которой ходит обучаемый 4. Ленточный транспортер 22 функционирует в качестве части для ходьбы, на которой ходит обучаемый 4. Лента в ленточном транспортере 22 вращается таким образом, что обучаемый 4 перемещается в направлении назад под управлением управляющего устройства 3. Другими словами, верхняя поверхность ленточного транспортера 22 движется в направлении назад. Это позволяет обучаемому 4 продолжать ходьбу в заранее установленном положении.
[0032] Робот 23 является роботизированным костюмом, который помогает ходить обучаемому 4. Робот 23 прикрепляется к пораженной (болезнью) ноге обучаемого 4. Робот 23 помогает обучаемому 4 в движении пораженной ноги под управлением управляющего устройства 3. Например, робот 23 работает для сгибания коленного сустава обучаемого 4 с заранее установленным интервалом времени, чтобы осуществлять движение пораженной ногой, пока обучаемый 4 ходит.
[0033] Разгрузочное устройство 24 поддерживает обучаемого 4 посредством подвешивания обучаемого 4. Один конец разгрузочного устройства 24 закреплен на верхнем компоненте 29 опоры. Другой конец разгрузочного устройства 24 имеет форму ленты, которая прикрепляется к верхней части тела обучаемого 4. Это позволяет обучаемому 4 сохранять положение стоя, даже когда обучаемый 4 теряет равновесие во время обучения ходьбе.
[0034] Корпус 25 двигателя содержит ось вращения (не показана) ленточного транспортера 22 и двигатель (не показан), который вращает эту ось вращения. Двигатель в корпусе 25 двигателя при приведении в движение под управлением управляющего устройства 3 заставляет перемещаться ленточный транспортер 22.
[0035] Справа и слева от ленточного транспортера 22 предоставляется поручень 26. Поручень 26 имеет перевернутую U-образную форму, и два его конца соединены на верхней стороне опоры 21. Это позволяет обучаемому 4 держать правый и левый поручни 26 правой и левой руками, чтобы дать обучаемому возможность без труда сохранять положение стоя.
[0036] Вертикальные компоненты 27 опоры являются компонентами, каждый из которых идет вертикально. Хотя фиг. 1 показывает пример, в котором беговая дорожка 2 имеет четыре вертикальных компонента 27 опоры, по одному в каждому из правого переднего положения, левого переднего положения, правого заднего положения и левого заднего положения, положения и количество вертикальных компонентов 27 опоры не ограничиваются показанными в примере.
[0037] Верхние компоненты 28 опоры, предусмотренные в верхней части вертикальных компонентов 27 опоры, являются компонентами, которые соединяют вертикальные компоненты 27 опоры. Фиг. 1 показывает пример, в котором беговая дорожка 2 имеет четыре верхних компонента 28 опоры. Точнее говоря, в показанном на фиг. 1 примере беговая дорожка 2 имеет верхний компонент 28 опоры, который соединяет вертикальные компоненты 27 опоры в правом переднем положении и левом переднем положении, верхний компонент 28 опоры, который соединяет вертикальные компоненты 27 опоры в правом заднем положении и левом заднем положении, верхний компонент 28 опоры, который соединяет вертикальные компоненты 27 опоры в правом переднем положении и правом заднем положении, и верхний компонент 28 опоры, который соединяет вертикальные компоненты 27 опоры в левом переднем положении и левом заднем положении. Однако количество верхних компонентов 28 опоры и сочетания верхнего компонента 28 опоры и вертикальных компонентов 27 опоры, с которыми соединяется верхний компонент 28 опоры, не ограничиваются показанными на фиг. 1.
[0038] Верхние компоненты 29 опоры, предусмотренные в самом верхнем положении вертикальных компонентов 27 опоры, являются компонентами, которые соединяют вертикальные компоненты 27 опоры. Другими словами, верхний компонент 29 опоры, предусмотренный над верхним компонентом 28 опоры, является компонентом, который соединяет вертикальные компоненты 27 опоры. Фиг. 1 показывает пример, в котором беговая дорожка 2 имеет пять верхних компонентов 29 опоры. Точнее говоря, в показанном на фиг. 1 примере беговая дорожка 2 имеет верхний компонент 29 опоры, который соединяет вертикальные компоненты 27 опоры в правом переднем положении и правом заднем положении, верхний компонент 29 опоры, который соединяет вертикальные компоненты 27 опоры в левом переднем положении и левом заднем положении, и три верхних компонента 29 опоры, которые соединяют те верхние компоненты 29 опоры.
[0039] Как описано выше, один конец разгрузочного устройства 24 соединен с верхним компонентом 29 опоры. Робот 23, также соединенный с верхним компонентом 29 опоры посредством кабеля, поддерживается таким образом, что робот 23 свисает с верхнего компонента 29 опоры. Это уменьшает нагрузку робота 23, которая прикладывается к обучаемому 4.
[0040] Далее со ссылкой на фиг. 2 описывается способ обнаружения аномалии в системе 1 обучения ходьбе в первом варианте осуществления. Фиг. 2 - вид сверху на опору 21 и ленточный транспортер 22.
[0041] Как описано выше, беговая дорожка 2 содержит опору 21 и ленточный транспортер 22. Как показано на фиг. 2, опора 21 имеет форму символа катаканы для "ro". Правая часть опоры 21 размещается справа от ленточного транспортера 22. Левая часть опоры 21 размещается слева от ленточного транспортера 22. Хотя фиг. 2 показывает пример, в котором передняя часть опоры и задняя часть опоры 21 перекрываются над ленточным транспортером 22, конфигурация не ограничивается этой конфигурацией. Передняя часть опоры 21 может размещаться до переднего конца ленточного транспортера 22, а задняя часть опоры 21 может размещаться после заднего конца ленточного транспортера 22. К тому же, опора 21 может конфигурироваться имеющей только правую часть опоры и левую часть опоры, но не переднюю часть опоры и заднюю часть опоры.
[0042] В такой конфигурации система 1 обучения ходьбе определяет, что формируется аномальное состояние, если на опоре 21 определяются три ноги или более. Это состояние формируется, например, когда обучаемый 4 теряет равновесие во время обучения ходьбе, и одна нога обучаемого 4 уходит на опору 21, которая находится за пределами ленточного транспортера 22, как показано на фиг. 2. В этом состоянии обучаемому 4 трудно продолжать обучение ходьбе, и обучаемому 4 необходимо сразу восстановить равновесие.
[0043] Чтобы разобраться с этим случаем, система 1 обучения ходьбе выполняет управление в аномальном случае, если определяется, что обнаруживается аномальное состояние. Например, система 1 обучения ходьбе выполняет по меньшей мере одно из следующих управляющих воздействий в качестве управления в аномальном случае, а именно, управление для уменьшения скорости ленточного транспортера 22, для остановки ленточного транспортера 22, для прекращения действия робота 23 и выдачи предупреждения обучаемому 4 и помощнику 5.
[0044] Теперь в системе 1 обучения ходьбе на опоре 21 размещаются датчики нагрузки для обнаружения нагрузки от ноги обучаемого 4 и помощника 5 на верхнюю сторону опоры 21, что будет описываться позже. Если обнаруживается нагрузка на верхней стороне опоры 21, то система 1 обучения ходьбе определяет, что на опоре 21 находится нога. Поэтому, если нагрузка на опоре 21 обнаруживается в трех или более точках на опоре 21, то система 1 обучения ходьбе определяет, что на опоре 21 находятся три ноги или более.
[0045] Однако в зависимости от того, как нагрузка от помощника 5 прикладывается к опоре 21, существует вероятность того, что нагрузка только от помощника 5 оказывается приложенной в трех или более точках на опоре 21. Например, в некоторых случаях нагрузка не обнаруживается под сводом ноги, а кончики пальцев и пятка обнаруживаются в виде отдельных точек нагрузки. В этом случае, если не учитывать это условие, то можно неправильно определить аномальное состояние вследствие нагрузки только от ноги помощника 5, даже если обучаемый 4 не поставил ногу на опору 21. Для решения этой проблемы в первом варианте осуществления используется один из двух описанных ниже способов, чтобы избежать такого неправильного определения.
[0046] Далее со ссылкой на фиг. 3 описывается первый способ. Как показано на фиг. 3, на опоре 21 множество датчиков 201 нагрузки размещается в виде сетки. То есть прямоугольные датчики 201 нагрузки размещаются близко друг к другу на опоре 21. Фиг. 3 показывает пример, в котором левая нога обучаемого 4 уходит на опору 21.
[0047] Каждый из множества датчиков 201 нагрузки обнаруживает распределение нагрузки на опоре 21. Если датчиками 201 нагрузки обнаруживаются два независимых распределения нагрузки, то управляющее устройство 3 определяет, больше ли заранее установленной длины длина между центрами двух распределений нагрузки. Если определяется, что длина между центрами двух распределений нагрузки больше заранее установленной длины, то управляющее устройство 3 рассматривает два распределения нагрузки как отдельные точки нагрузки. То есть управляющее устройство 3 определяет одно из двух распределений нагрузки как распределение нагрузки от ноги обучаемого 4, а другое - соответственно как распределение нагрузки от ноги помощника 5. Другими словами, управляющее устройство 3 определяет, что на опоре 21 находится нога обучаемого 4 и нога помощника. С другой стороны, если определяется, что длина между центрами двух распределений нагрузки меньше либо равна заранее установленной длине, то управляющее устройство 3 рассматривает два распределения нагрузки как одну точку нагрузки. То есть управляющее устройство 3 определяет два распределения нагрузки как одно распределение нагрузки от ноги помощника 5. Другими словами, управляющее устройство 3 определяет, что на опоре 21 находится только нога помощника.
[0048] В качестве описанной выше заранее установленной длины можно задать любое значение при условии, что длина достаточно большая для распознавания распределений нагрузки, созданных обучаемым 4 и помощником 5, и распределения нагрузки, созданного только помощником 5. Предпочтительно, чтобы заранее установленная длина задавалась размером ноги помощника 5.
[0049] В соответствии с описанным выше первым способом можно распознать случай, в котором обнаруживаются три или более независимых нагрузок, созданных обучаемым 4 и помощником 5, и поэтому определяется, что на опоре 21 находятся три ноги или более, как показано на фиг. 3, и случай, в котором обнаруживаются три или более независимых нагрузок, созданных только помощником 5, и поэтому определяется, что на опоре 21 не находятся три ноги или более.
[0050] Далее со ссылкой на фиг. 4 описывается второй способ. Как описано выше, на опоре 21 множество датчиков 201 нагрузки размещается в виде сетки. Также на фиг. 4 показан пример, в котором левая нога обучаемого 4 уходит на опору 21.
[0051] Если датчиками 201 нагрузки обнаруживаются два независимых распределения нагрузки, то управляющее устройство 3 определяет, больше ли заранее установленной длины длина всех двух распределений нагрузки. Длина всех распределений нагрузки, например, является наибольшей из длин от одного конца одного распределения нагрузки до одного конца другого распределения нагрузки. Если определяется, что длина всех двух распределений нагрузки больше заранее установленной длины, то управляющее устройство 3 рассматривает два распределения нагрузки как отдельные точки нагрузки. С другой стороны, если определяется, что длина всех двух распределений нагрузки меньше либо равна заранее установленной длине, то управляющее устройство 3 рассматривает два распределения нагрузки как одну точку нагрузки. Заранее установленная длина во втором способе может задаваться таким же образом, как описано в первом способе.
[0052] В соответствии с описанным выше вторым способом также можно распознать случай, в котором обнаруживаются три или более независимых нагрузок, созданных обучаемым 4 и помощником 5, и поэтому определяется, что на опоре 21 находятся три ноги или более, как показано на фиг. 4, и случай, в котором обнаруживаются три или более независимых нагрузок, созданных только помощником 5, и поэтому определяется, что на опоре 21 не находятся три ноги или более.
[0053] Как описано выше, можно избежать неправильного определения путем определения, что находятся две ноги, если длина между двумя распределениями нагрузки больше заранее установленной длины, и что находится одна нога, если длина между двумя распределениями нагрузки меньше либо равна заранее установленной длине. В этом случае длина между двумя распределениями нагрузки, используемая в том определении, может быть длиной между центрами двух распределений нагрузки, как описано в первом способе, либо может быть длиной всех двух распределений нагрузки (длина от конца одного распределения нагрузки до конца другого распределения нагрузки), как описано во втором способе. Определение в первом способе и определение во втором способе выполняются независимо в правой части опоры и левой части опоры 21.
[0054] Далее со ссылкой на фиг. 5 описывается конфигурация управляющей системы в системе 1 обучения ходьбе в первом варианте осуществления. В беговой дорожке 2 опора 21 содержит множество датчиков 201 нагрузки, ленточный транспортер 22 имеет двигатель 202, робот 23 имеет двигатель 203 и разгрузочное устройство 24 имеет двигатель 204, как показано на фиг. 5.
[0055] Множество датчиков 201 нагрузки размещается на опоре 21 в виде сетки, как описано выше. Каждый из множества датчиков 201 нагрузки обнаруживает (измеряет) распределение нагрузки на опоре 21 и отправляет в управляющее устройство 3 информацию о распределении нагрузки, которая указывает обнаруженное распределение нагрузки.
[0056] Двигатель 202 является двигателем, который вращает ленту описанного выше ленточного транспортера 22. Двигатель 202 соответствует двигателю в описанном выше корпусе 25 двигателя. Двигатель 202 приводится в движение в соответствии со значением команды, принятым от управляющего устройства 3, чтобы вращать ленту ленточного транспортера 22.
[0057] Двигатель 203 заставляет робота 23 выполнять сгибательное движение. Двигатель 203, приводимый в движение в соответствии со значением команды, принятым от управляющего устройства 3, заставляет робота 23 выполнять сгибательное движение. Управляющее устройство 3 отправляет значение команды в двигатель 203, чтобы заставить робота 23 выполнять сгибательное движение с заранее установленным интервалом времени. Это заставляет робота 23 сгибать коленный сустав обучаемого с заранее установленным интервалом времени, чтобы реализовать перемещение во время ходьбы для пораженной ноги, как описано выше.
[0058] Двигатель 204 тянет вверх разгрузочное устройство 24. Двигатель 204, приводимый в движение в соответствии со значением команды, принятым от управляющего устройства 3, тянет вверх разгрузочное устройство 24. После того как обучаемый 4 надевает разгрузочное устройство 24, управляющее устройство 3 отправляет значение команды для подтягивания разгрузочного устройства 24. Это позволяет обучаемому 4 принять положение стоя перед началом обучения ходьбе.
[0059] Как показано на фиг. 5, управляющее устройство 3 включает в себя блок 31 получения значения датчика, блок 32 определения аномалии, блок 33 управления транспортером, блок 34 управления роботом, блок 35 управления разгрузочным устройством и запоминающее устройство 36. Управляющее устройство 3 включает в себя центральный процессор (CPU) и посредством этого CPU исполняет программы, которые исполняют обработку из описанных выше блоков 31-35, чтобы реализовать функции блоков 31-35.
[0060] Блок 31 получения значения датчика принимает информацию о распределении нагрузки, отправленную из каждого из множества датчиков 201 нагрузки. Точнее говоря, пока обучаемый 4 проходит обучение ходьбе, блок 31 получения значения датчика принимает с заранее установленным интервалом времени информацию о распределении нагрузки от каждого из множества датчиков 201 нагрузки.
[0061] Блок 32 определения аномалии на основе информации о распределении нагрузки, принятой блоком 31 получения значения датчика, определяет, находятся ли на опоре 21 три ноги или более. Если определяется, что на опоре 21 не находятся три ноги или более, то блок 32 определения аномалии определяет, что состояние является нормальным. С другой стороны, если определяется, что на опоре 21 находятся три ноги или более, то блок 32 определения аномалии определяет, что состояние является аномальным. При определении, является ли состояние аномальным, используется первый способ или второй способ, которые описаны выше, чтобы избежать неправильного определения и обнаружить аномальное состояние.
[0062] Блок 33 управления транспортером формирует значение команды, которое управляет двигателем 202 ленточного транспортера 22, и отправляет сформированное значение команды на беговую дорожку 2. Если блок 32 определения аномалии определяет, что состояние является нормальным, пока обучаемый 4 проходит обучение ходьбе, то блок 33 управления транспортером формирует значение команды, которое вращает двигатель 202 ленточного транспортера 22, и отправляет сформированное значение команды на беговую дорожку 2. С другой стороны, если блок 32 определения аномалии определяет, что состояние является аномальным, пока обучаемый 4 проходит обучение ходьбе, то блок 33 управления транспортером формирует значение команды, которое уменьшает скорость вращения двигателя 202 ленточного транспортера 22 до скорости вращения ниже скорости в нормальном состоянии или значение команды, которое останавливает вращение двигателя 202 ленточного транспортера 22, и отправляет сформированное значение команды на беговую дорожку 2.
[0063] Блок 34 управления роботом формирует значение команды, которое управляет двигателем 203 робота 23, и отправляет сформированное значение команды на беговую дорожку 2. Если блок 32 определения аномалии определяет, что состояние является нормальным, пока обучаемый 4 проходит обучение ходьбе, то блок 34 управления роботом формирует значение команды, которое заставляет робота 23 выполнять сгибательное движение с заранее установленным интервалом времени, и отправляет сформированное значение команды на беговую дорожку 2. С другой стороны, если блок 32 определения аномалии определяет, что состояние является нормальным, пока обучаемый 4 проходит обучение ходьбе, то блок 34 управления роботом формирует значение команды, которое заставляет робота 23 прекратить сгибательное движение и отправляет сформированное значение команды на беговую дорожку 2.
[0064] Блок 35 управления разгрузочным устройством формирует значение команды, которое управляет двигателем 204 разгрузочного устройства 24, и отправляет сформированное значение команды на беговую дорожку 2. После того как обучаемый 4 надевает разгрузочное устройство 24, блок 35 управления разгрузочным устройством формирует значение команды, которое тянет вверх разгрузочное устройство 24, и отправляет сформированное значение команды на беговую дорожку 2.
[0065] Запоминающее устройство 36 хранит различные типы информации, которая используется управляющим устройством 3 для управления беговой дорожкой 2. Запоминающее устройство 36 включает в себя по меньшей мере одно запоминающее устройство. Запоминающее устройство является, например, памятью или накопителем на жестком диске.
[0066] Точнее говоря, запоминающее устройство 36 заранее сохраняет информацию 301 о положении датчиков, информацию 302 о размере датчиков и информацию 303 о размере ноги. Информация 301 о положении датчиков является информацией, указывающей положение каждого из множества датчиков 201 нагрузки на опоре 21. Информация 302 о размере датчиков является информацией, указывающей размер датчика 201 нагрузки.
[0067] Блок 32 определения аномалии использует информацию 301 о положении датчиков и информацию 302 о размере датчиков для вычисления длины между центрами распределений нагрузки или длины всех распределений нагрузки. Например, когда каждая из двух порций информации о распределении нагрузки от двух датчиков 201 нагрузки указывает распределение нагрузки, блок 32 определения аномалии на основе информации 301 о положении датчиков определяет, имеется ли другой датчик 201 нагрузки между теми двумя датчиками 201 нагрузки. Если определяется, что имеется датчик 201 нагрузки между двумя датчиками 201 нагрузки, то блок 32 определения аномалии добавляет длину датчика 201 нагрузки, который присутствует между двумя датчиками 201 нагрузки, к длинам в распределениях нагрузки, обнаруженных двумя датчиками 201 нагрузки, чтобы вычислить длину между центрами распределений нагрузки или длину всех распределений нагрузки. В этом случае размер датчика 201 нагрузки, указанный информацией 302 о размере датчиков, используется для длины датчиков 201 нагрузки.
[0068] Чтобы идентифицировать положение датчика 201 нагрузки, информация 301 о положении датчиков задается для каждого из множества датчиков 201 нагрузки путем ассоциации идентификатора, который однозначно идентифицирует датчики 201 нагрузки, с положением того датчика 201 нагрузки. Каждый из датчиков 201 нагрузки отправляет информацию о распределении нагрузки с включенным в нее идентификатором того датчика 201 нагрузки. Это позволяет блоку 32 определения аномалии идентифицировать положение датчика 201 нагрузки, который отправил информацию о распределении нагрузки, из включенного в информацию о распределении нагрузки идентификатора на основе информации 301 о положении датчиков.
[0069] Информация 303 о размере ноги является информацией, указывающей размер ноги помощника 5. Размер ноги, указанный информацией 303 о размере ноги, используется, когда заранее установленный размер задается в качестве размера ноги помощника 5 в первом способе и втором способе, описанных выше. В этом случае информация 303 о размере ноги формируется для указания размера, который помощник 5 заранее ввел в управляющее устройство 3 посредством устройства ввода (не показано) в управляющем устройстве 3, и сформированная информация 303 о размере ноги хранится в запоминающем устройстве 36. Информация 303 о размере ноги также может формироваться для указания длины распределения нагрузки, обнаруженного датчиком 201 нагрузки, когда только помощник 5 встает на опору 21 перед началом обучения ходьбе, и сформированная информация 303 о размере ноги хранится в запоминающем устройстве 36.
[0070] Далее со ссылкой на фиг. 6A - 6E описывается пример процедуры обучения ходьбе в системе 1 обучения ходьбе в первом варианте осуществления. На фиг. 6A - 6E на левой половине показано состояние системы 1 обучения ходьбе, если смотреть сбоку, а на правой половине показано состояние опоры 21 и ленточного транспортера 22, если смотреть сверху.
[0071] Сначала, как показано на фиг. 6A, обучаемый 4 приближается к беговой дорожке 2 в кресле-каталке. Кресло-каталка перемещается помощником 5 к беговой дорожке 2. В то же время на опоре 21 и ленточном транспортере 22 не находится ничего.
[0072] Далее, как показано на фиг. 6B, помощник 5 толкает кресло-каталку, в которой сидит обучаемый 4, и заезжает на беговую дорожку 2. Итак, кресло-каталка, в которой сидит обучаемый 4, и помощник 5 находятся на ленточном транспортере 22. Нагрузка от кресла-каталки и две точки нагрузки от ног помощника 5 позади кресла-каталки прикладываются к ленточному транспортеру 22.
[0073] Далее, как показано на фиг. 6C, помощник 5 обходит обучаемого 4 спереди и прикрепляет робота 23 к пораженной ноге обучаемого 4. В то же время кресло-каталка, в которой сидит обучаемый 4, и помощник 5 находятся на ленточном транспортере 22. На ленточном транспортере 22 две точки нагрузки от ног помощника 5 прикладываются к участку перед креслом-каталкой.
[0074] Далее, как показано на фиг. 6D, помощник 5 прикрепляет разгрузочное устройство 24 к обучаемому 4 и поднимает обучаемого 4. Точнее говоря, помощник 5 прикрепляет разгрузочное устройство 24 к обучаемому 4 и посредством устройства ввода в управляющем устройстве 3 вводит входные данные, чтобы подтянуть разгрузочное устройство 24. В ответ на входные данные от помощника 5 блок 35 управления разгрузочным устройством в управляющем устройстве 3 формирует значение команды, которое тянет вверх разгрузочное устройство 24, и отправляет сформированное значение команды на беговую дорожку 2. Это приводит в движение двигатель 204 разгрузочного устройства 24, чтобы заставить разгрузочное устройство 24 поднять обучаемого 4, чтобы обучаемый 4 мог принять положение стоя. Помощник 5 выкатывает кресло-каталку с беговой дорожки 2. В то же время обучаемый 4 и помощник 5 находятся на ленточном транспортере 22. То есть к ленточному транспортеру 22 прикладываются две точки нагрузки от ног обучаемого 4 и две точки нагрузки от ног помощника 5, которые находятся перед первыми двумя точками.
[0075] Далее, как показано на фиг. 6E, помощник 5 начинает обучение ходьбе обучаемого 4. Точнее говоря, помощник 5 посредством устройства ввода в управляющем устройстве 3 вводит входные данные, чтобы начать обучение ходьбе. В ответ на входные данные от помощника 5 блок 32 определения аномалии в управляющем устройстве 3 начинает определение, формируется ли аномальное состояние, на основе информации о распределении нагрузки, принятой от множества датчиков 201 нагрузки. В ответ на входные данные от помощника 5 блок 33 управления транспортером в управляющем устройстве 3 приводит в движение двигатель 202, чтобы переместить обучаемого 4 назад посредством ленточного транспортера 22. В ответ на входные данные от помощника 5 блок 34 управления роботом в управляющем устройстве 3 начинает управлять двигателем 203 робота 23, чтобы сгибать пораженную ногу обучаемого 4. Помощник 5 обходит обучаемого 4 сзади и встает на опору 21, чтобы поддерживать обучаемого 4. В то же время, чтобы обучение ходьбе началось после того, как помощник 5 поддерживает обучаемого 4, управляющее устройство 3 может начать вышеописанные управляющие воздействия, которые выполняются в ответ на входные данные, после того, как истекло заранее установленное время с тех пор, как введены входные данные, которые указывают начало обучения ходьбе.
[0076] Далее со ссылкой на фиг. 7 описывается обработка в системе 1 обучения ходьбе в первом варианте осуществления.
[0077] Блок 31 получения значения датчика принимает с заранее установленным интервалом времени информацию о распределении нагрузки, отправленную из каждого из множества датчиков 201 нагрузки (S1). Блок 32 определения аномалии на основе информации о распределении нагрузки, принятой блоком 31 получения значения датчика, определяет, находятся ли на опоре 21 три ноги или более (S2).
[0078] Если определяется, что на опоре 21 не находятся три ноги или более (S2: Нет), то блок 32 определения аномалии определяет, что состояние является нормальным, и продолжает определение на основе информации о распределении нагрузки, принимаемой с заранее установленным интервалом времени (S1, S2). С другой стороны, если определяется, что на опоре 21 находятся три ноги или более (S2: Да), то блок 32 определения аномалии определяет, что формируется аномальное состояние. В этом случае блок 33 управления транспортером и блок 34 управления роботом выполняют управление в аномальном случае, как описано выше (S3).
[0079] Точнее говоря, блок 33 управления транспортером выполняет управление для уменьшения скорости ленточного транспортера 22 или для остановки ленточного транспортера 22. Блок 34 управления роботом выполняет управление для прекращения действия робота 23.
[0080] Обучаемому 4 и помощнику 5 можно отправить предупреждение. В этом случае беговой дорожке 2 необходимо содержать предупреждающее устройство, а управляющему устройству 3 - содержать блок управления предупреждающим устройством. Блок управления предупреждающим устройством отправляет управляющую информацию в предупреждающее устройство, чтобы дать ему команду выдать предупреждение. В ответ на управляющую информацию от блока управления предупреждающим устройством предупреждающее устройство предупреждает обучаемого 4 и помощника 5. Предупреждение можно выдавать любым способом, посредством света либо звука. Когда предупреждение выдается посредством света, в качестве предупреждающего устройства используется лампа, и эта лампа включается в ответ на управляющую информацию от управляющего устройства 3. Когда предупреждение выдается посредством звука, в качестве предупреждающего устройства используется динамик, и звуковой сигнал предупреждения выводится из динамика в ответ на управляющую информацию от управляющего устройства 3.
[0081] В первом варианте осуществления блок 32 определения аномалии на основе результата измерения от датчиков 201 нагрузки определяет, находятся ли на опоре 21 три ноги или более, как описано выше. Если блок 32 определения аномалии определяет, что находятся три ноги или более, то блок 33 управления транспортером и блок 34 управления роботом выполняют управление в аномальном случае. В этой конфигурации можно обнаружить ситуацию, в которой обучаемый 4 теряет равновесие во время ходьбы и уходит на опору 21. То есть можно обнаружить аномальное состояние во время обучения ходьбе.
[0082] В первом варианте осуществления датчики 201 нагрузки измеряют нагрузку от ног на опору 21, а блок 32 определения аномалии определяет, что на опоре 21 находятся ноги, когда нагрузка измеряется датчиками 201 нагрузки. Это реализует устойчивую к загрязнению, недорогую систему по сравнению со случаем, в котором используется оптический датчик.
[0083] <Второй вариант осуществления настоящего изобретения>
Далее описывается второй вариант осуществления. В описании ниже такое же содержание, что и в первом варианте осуществления, по необходимости пропускается. В первом варианте осуществления описывается пример, в котором датчики 201 нагрузки размещаются близко друг к другу в виде сетки на всей области опоры 21. Однако, поскольку помощник 5 поддерживает обучаемого 4 позади обучаемого 4 обеими руками, область опоры 21, в которой ставит ноги помощник 5, ограничивается заранее установленной областью сзади. К тому же, поскольку обучаемый 4 поддерживается помощником 5 обеими руками, обучаемый 4 располагается очень близко к помощнику 5. Поэтому, когда обучаемый 4 теряет равновесие и ставит ногу на опору 21, нога обучаемого 4 с большой вероятностью располагается возле ноги помощника 5.
[0084] То есть в первом варианте осуществления, когда обнаруживаются два распределения нагрузки, на основе длины двух распределений нагрузки определяется, формируются ли те распределения нагрузки только помощником 5 или же обучаемым 4 и помощником 5. В этом случае область, в которой нужно выполнять такое определение, ограничивается заранее установленной областью в задней части опоры 21, где обучаемый 4 и помощник 5, вероятно, ставят ногу.
[0085] Чтобы разобраться с этим случаем, во втором варианте осуществления множество датчиков 201 нагрузки размещается близко друг к другу в виде сетки только в заранее установленной области в задней части каждой из правой части опоры и левой части опоры 21, как показано на фиг. 8. Эта заранее установленная область является, например, областью позади среднего положения опоры 21 в продольном направлении, но не ограничивается той областью. Способ для определения, находятся ли три ноги или более, на основе распределений нагрузки, обнаруженных множеством датчиков 201 нагрузки, является таким же, как и в первом варианте осуществления, и поэтому его описание пропускается.
[0086] Во втором варианте осуществления опора 21 содержит два двухпозиционных датчика 205. Передняя часть опоры 21 (передняя часть опоры и область в правой части опоры и левой части опоры, где не размещаются датчики 201 нагрузки) является плоским компонентом в форме символа катаканы для "ko", и под этой передней частью размещается один двухпозиционный датчик 205. Вследствие этого двухпозиционный датчик 205 включается, когда ногу ставят на переднюю часть (плоский компонент в форме символа катаканы для "ko") опоры 21, и поэтому передняя часть нажимается, тогда как двухпозиционный датчик 205 остается выключенным, когда ногу не ставят на переднюю часть, и поэтому передняя часть не нажимается.
[0087] Существует очень низкая вероятность, что нагрузка прикладывается к передней части опоры 21 помощником 5, тогда как существует очень высокая вероятность, что нагрузка прикладывается к передней части только когда обучаемый 4 теряет равновесие. Поэтому приложение третьей точки нагрузки от обучаемого 4 к передней части опоры 21 можно обнаружить просто путем обнаружения, нажата ли передняя часть опоры 21, посредством двухпозиционного датчика 205.
[0088] Во втором варианте осуществления задняя часть опоры 21 также является плоским компонентом, имеющим форму символа кандзи для "единицы", и под этой задней частью опоры размещается другой двухпозиционный датчик 205. Вследствие этого двухпозиционный датчик 205 включается, когда задняя часть опоры 21 нажимается, тогда как двухпозиционный датчик 205 остается выключенным, когда задняя часть опоры не нажимается.
[0089] Эта конструкция также позволяет обнаружить аномалию, которая возникает, когда третье лицо, помимо обучаемого 4 и помощника 5, входит на беговую дорожку 2 во время обучения ходьбе.
[0090] Далее со ссылкой на фиг. 9 описывается конфигурация управляющей системы в системе 1 обучения ходьбе во втором варианте осуществления. Как показано на фиг. 9, второй вариант осуществления отличается от первого варианта осуществления в том, что опора 21 беговой дорожки 2 дополнительно включает в себя два двухпозиционных датчика 205. К тому же количество датчиков 201 нагрузки во втором варианте осуществления меньше количества в первом варианте осуществления, который описан выше.
[0091] Каждый из двух двухпозиционных датчиков 205 отправляет управляющему устройству 3 уведомление о состоянии, которое указывает, что датчик находится в выключенном состоянии, если ногу не ставят на каждую из передней части и задней части опоры 21, и поэтому датчик выключен. С другой стороны, каждый из двух двухпозиционных датчиков 205 отправляет управляющему устройству 3 уведомление о состоянии, которое указывает, что датчик находится во включенном состоянии, если ногу ставят на каждую из передней части и задней части опоры 21, и поэтому датчик включен. Двухпозиционный датчик 205, который просто обнаруживает, является ли состояние включенным или выключенным, дешевле, чем датчики 201 нагрузки, которые обнаруживают распределение нагрузки.
[0092] Во втором варианте осуществления блок 31 получения значения датчика принимает информацию о распределении нагрузки, отправленную из множества датчиков 201 нагрузки, а также уведомление о состоянии, отправленное из каждого из двух двухпозиционных датчиков 205.
[0093] Во втором варианте осуществления блок 32 определения аномалии, как и в первом варианте осуществления, на основе информации о распределении нагрузки, принятой блоком 31 получения значения датчика, определяет, находятся ли на опоре 21 три ноги или более. К тому же, во втором варианте осуществления блок 32 определения аномалии на основе уведомления о состоянии, принятого блоком 31 получения значения датчика, определяет, находятся ли на опоре 21 три ноги или более.
[0094] Точнее говоря, блок 32 определения аномалии определяет, что на опоре 21 находятся три ноги или более, если по меньшей мере одна из двух порций уведомления о состоянии указывает включенное состояние. То есть блок 32 определения аномалии определяет, что состояние является аномальным. Причина в том, что включенное состояние, сформированное из-за нажатия на двухпозиционный датчик 205, является состоянием, в котором на опору 21 ставит ногу человек помимо помощника 5, как описано выше. С другой стороны, если обе порции уведомления о состоянии указывают выключенное состояние, то блок 32 определения аномалии определяет, что на опоре 21 не находятся три ноги или более. То есть блок 32 определения аномалии определяет, что состояние является нормальным (пока состояние не определяется как аномальное на основе информации о распределении нагрузки). Определение, выполненное блоком 32 определения аномалии, не ограничивается определением, указывает ли включенное состояние по меньшей мере одна из двух порций уведомления о состоянии. То есть, если на основе информации о распределении нагрузки, принятой блоком 31 получения значения датчика, определяется, что на опоре 21 находятся две ноги и если по меньшей мере одна из двух порций уведомления о состоянии указывает включенное состояние, то блок 32 определения аномалии может определить, что находятся три ноги или более, а в остальных случаях может определить, что не находятся три ноги или более.
[0095] Во втором варианте осуществления множество датчиков 201 нагрузки размещается близко друг к другу на опоре 21 только в заранее установленной области на стороне в направлении, противоположном направлению перемещения обучаемого 4 (сзади). В соответствии с этой конфигурацией датчики 201 нагрузки размещаются только в области, в которой обучаемый 4 и помощник 5 могут поставить ногу, и обстоятельное определение выполняется на основе распределения нагрузки. Следовательно, это уменьшает количество датчиков 201 нагрузки и снижает стоимость без уменьшения точности обнаружения.
[0096] Во втором варианте осуществления система 1 обучения ходьбе содержит двухпозиционные датчики 205, которые включаются, когда ставят ногу, и остаются выключенными, когда ногу не ставят, в области на опоре 21 за пределами области, в которой размещается множество датчиков 201 нагрузки. Если на основе результата измерения от множества датчиков 201 нагрузки определяется, что на опоре 21 находятся две ноги и если двухпозиционный датчик 205 включается, то блок 32 определения аномалии определяет, что на опоре 21 находятся три ноги или более. Эта конфигурация содержит недорогие двухпозиционные датчики 205, размещенные только в области, в которой, вероятно, только обучаемый 4 ставит ногу, чтобы обнаруживать наличие ноги обучаемого 4, соответственно снижая стоимость без уменьшения точности обнаружения.
[0097] <Третий вариант осуществления настоящего изобретения>
Далее описывается третий вариант осуществления. В описании ниже такое же содержание, что и в первом варианте осуществления, по необходимости пропускается. В первом варианте осуществления определяется, что обнаруживается аномальное состояние, если на опоре 21 находятся три ноги или более. Однако, когда помощник 5 теряет равновесие и наступает на ленточный транспортер 22, помощнику 5 становится трудно поддерживать обучаемого 4, а обучаемому 4 продолжать обучение ходьбе. В третьем варианте осуществления описывается система 1 обучения ходьбе, которая может обнаружить такое условие как аномальное состояние.
[0098] Третий вариант осуществления отличается от первого варианта осуществления тем, что множество датчиков 201 нагрузки размещается не на опоре 21, а на ленточном транспортере 22. Датчики 201 нагрузки размещаются под верхней лентой 22 ленточного транспортера. Это позволяет обнаруживать нагрузку также на ленте, которая движется. Множество датчиков 201 нагрузки размещается в виде сетки в области, которая находится на ленточном транспортере 22 и окружена опорой 21, как показано на фиг. 10.
[0099] Способ обнаружения аномального состояния и обработка в аномальном случае, выполняемая для аномального состояния, являются такими же, как и в первом варианте осуществления, и поэтому их описание пропускается.
[0100] В третьем варианте осуществления блок 32 определения аномалии на основе результата измерения от датчиков 201 нагрузки определяет, находятся ли на ленточном транспортере 22 три ноги или более, как описано выше. Если блок 32 определения аномалии определяет, что находятся три ноги или более, то блок 33 управления транспортером и блок 34 управления роботом выполняют управление в аномальном случае. Это позволяет обнаруживать ситуацию, в которой помощник 5 сходит с опоры 21. То есть можно обнаружить аномальное состояние во время обучения ходьбе.
[0101] Третий вариант осуществления может выполняться путем его объединения с первым вариантом осуществления или вторым вариантом осуществления. То есть в первом варианте осуществления или втором варианте осуществления можно выполнить определение, находятся ли на ленточном транспортере 22 три ноги или более, как описано в третьем варианте осуществления.
[0102] В этом случае в первом варианте осуществления или втором варианте осуществления можно выполнить определение, находятся ли на ленточном транспортере 22 три ноги или более, без объединения этого варианта осуществления с третьим вариантом осуществления. То есть, если распределение нагрузки обнаруживается только в одной точке на опоре 21 или если на опоре 21 не обнаруживается никакого распределения нагрузки, то блок 32 определения аномалии может определить, что нога помощника 5 наступает на ленточный транспортер 22, и поэтому на ленточном транспортере 22 находятся три ноги или более. Если блок 32 определения аномалии определяет, что на ленточном транспортере 22 находятся три ноги или более, то блок 33 управления транспортером и блок 34 управления роботом могут выполнить обработку в аномальном случае.
[0103] <Четвертый вариант осуществления настоящего изобретения>
Далее описывается четвертый вариант осуществления. В описании ниже такое же содержание, что и в первом варианте осуществления, по необходимости пропускается. В вариантах осуществления с первого по третий выполняется определение, присутствует ли нога в трех точках или более на опоре 21 или на ленточном транспортере 22, используя нагрузку, измеренную датчиками 201 нагрузки. Однако сущность, измеренная для определения наличия ноги на опоре 21 и ленточном транспортере 22, не ограничивается нагрузкой. Также можно измерять другую сущность, если можно определить, находится ли на опоре 21 или ленточном транспортере 22 три ноги или более. В четвертом варианте осуществления описывается пример, в котором наличие ноги на опоре 21 или ленточном транспортере 22 измеряется инфракрасными датчиками.
[0104] Со ссылкой на фиг. 11 описывается конфигурация системы 1 обучения ходьбе в четвертом варианте осуществления. Как показано на фиг. 11, четвертый вариант осуществления отличается от первого варианта осуществления тем, что беговая дорожка 2 имеет множество инфракрасных датчиков 206 вместо множества датчиков 201 нагрузки. Для разъяснения признака четвертого варианта осуществления на фиг. 11 не показаны обучаемый 4, помощник 5, робот 23, разгрузочное устройство 24 и поручень 26.
[0105] Множество инфракрасных датчиков 206 устанавливается таким образом, что инфракрасные датчики следят сверху за границей между опорой 21 и ленточным транспортером 22. Множество инфракрасных датчиков 206 устанавливается таким образом, что каждый из инфракрасных датчиков следит с заранее установленным интервалом за границей между опорой 21 и ленточным транспортером 22. Например, интервал точек наблюдения на границе между опорой 21 и ленточным транспортером 22 является таким же, как интервал, с которым размещается множество инфракрасных датчиков 206. Например, множество инфракрасных датчиков 206 размещается в ряд на нижней части верхнего компонента 28 опоры, как показано на фиг. 11, чтобы инфракрасные датчики были параллельны границе между опорой 21 и ленточным транспортером 22. Этот верхний компонент 28 опоры является, например, компонентом, который соединяет вертикальный компонент 27 опоры в правом переднем положении с компонентом в правом заднем положении. Размещение множества инфракрасных датчиков 206 не ограничивается проиллюстрированным на фиг. 11 при условии, что можно следить за границей между опорой 21 и ленточным транспортером 22. Например, множество инфракрасных датчиков может размещаться на верхнем компоненте 29 опоры или на других компонентах на беговой дорожке 2.
[0106] Для разъяснения размещения инфракрасных датчиков 206 на фиг. 11 показано только множество инфракрасных датчиков 206, которые следят за границей между правой частью опоры 21 и ленточным транспортером 22. Беговая дорожка 2 также имеет множество инфракрасных датчиков 206, которые следят за границей между левой частью опоры 21 и ленточным транспортером 22.
[0107] Далее со ссылкой на фиг. 12-15 описывается способ обнаружения аномалии в системе 1 обучения ходьбе в четвертом варианте осуществления. Фиг. 12 - вид сверху, показывающий опору 21 и ленточный транспортер 22.
[0108] Как описано выше, беговая дорожка 2 содержит множество инфракрасных датчиков 206 таким образом, что наблюдается каждая из границы между правой частью опоры 21 и ленточным транспортером 22 и границы между левой частью опоры 21 и ленточным транспортером 22. Поэтому линия наблюдения у множества инфракрасных датчиков 206 образуется на каждой из границы между правой частью опоры 21 и ленточным транспортером 22 и границей между левой частью опоры 21 и ленточным транспортером 22.
[0109] В соответствии с этой конфигурацией, пока обучаемый 4 проходит обучение ходьбе обычным порядком, линия наблюдения у инфракрасных датчиков 206 перекрывается в двух положениях, одно на правой ноге, а другое на левой ноге помощника 5. С другой стороны, когда обучаемый 4 теряет равновесие и одна нога обучаемого 4 уходит на опору 21, линия наблюдения у инфракрасных датчиков 206 перекрывается в трех положениях. То есть, когда инфракрасными датчиками 206 обнаруживается перекрытие инфракрасного света, система 1 обучения ходьбе определяет, что на опоре 21 находится нога.
[0110] Поэтому, если линия наблюдения у инфракрасных датчиков 206 перекрывается в трех или более положениях, то система 1 обучения ходьбе в основном определяет, что на опоре 21 находятся три ноги или более. Это состояние, в котором обучаемый 4 теряет равновесие и одна нога обучаемого 4 уходит на опору 21, которая находится за пределами ленточного транспортера 22, как показано на фиг. 12.
[0111] Конкретный пример описывается со ссылкой на фиг. 13-15. Фиг. с 13 по 15 являются схемами, показывающими пример состояния линии наблюдения на границе между левой опорой 21 и ленточным транспортером 22. В описании ниже предполагается, что линия наблюдения на границе между правой частью опоры 21 и ленточным транспортером 22 перекрывается в одном положении правой ногой помощника 5.
[0112] Если линия наблюдения на границе между левой частью опоры 21 и ленточным транспортером 22 перекрывается в одном положении левой ногой помощника 5, как показано на фиг. 13, то линия наблюдения у инфракрасных датчиков 206 перекрывается всего в двух положениях, одно - правой ногой, а другое - левой ногой. В этом случае система 1 обучения ходьбе определяет, что состояние нормальное.
[0113] Если линия наблюдения на границе между левой частью опоры 21 и ленточным транспортером 22 перекрывается в двух положениях, одно - левой ногой обучаемого 4, а другое - левой ногой помощника 5, как показано на фиг. 14, то линия наблюдения у инфракрасных датчиков 206 перекрывается всего в трех положениях. В этом случае система 1 обучения ходьбе определяет, что состояние аномальное.
[0114] Если левая нога обучаемого 4 и левая нога помощника 5 находятся рядом друг с другом, как показано на фиг. 15, и если линия наблюдения на границе между левой частью опоры 21 и ленточным транспортером 22 перекрывается левой ногой обучаемого 4 и левой ногой помощника 5, то линия наблюдения в некоторых случаях оказывается перекрытой в одном положении. То есть линия наблюдения у инфракрасных датчиков 206 в некоторых случаях оказывается перекрытой всего в двух положениях. В этом случае, например, перекрывается инфракрасная линия последовательных инфракрасных датчиков 206.
[0115] В этом случае, если не учитывать это условие, то можно неправильно определить состояние как нормальное состояние, невзирая на то, что обучаемый 4 ставит ногу на опору 21. Для решения этой проблемы в четвертом варианте осуществления используется описанный ниже способ, чтобы избежать такого неправильного определения.
[0116] Каждый из множества инфракрасных датчиков 206 фокусирует инфракрасный свет на границу между опорой 21 и ленточным транспортером 22, чтобы обнаружить, перекрывается ли ногой сфокусированная инфракрасная линия. Каждый из множества инфракрасных датчиков 206 является, например, инфракрасным датчиком 206 отражательного типа.
[0117] Если инфракрасный свет от двух или более непоследовательных инфракрасных датчиков 206 перекрывается на линии наблюдения, то управляющее устройство 3 определяет, что линия наблюдения перекрывается в двух или более положениях. Это случай, который показан, например, на фиг. 14.
[0118] Если инфракрасный свет от двух или более последовательных инфракрасных датчиков 206 перекрывается на линии наблюдения, то управляющее устройство 3 определяет, больше ли заранее установленной длины длина между двумя инфракрасными датчиками 206 с обоих концов, которые включаются в два или более инфракрасных датчиков 206, у которых перекрывается инфракрасная линия. Другими словами, управляющее устройство 3 определяет, больше ли заранее установленной длины длина, на которой перекрывается инфракрасный свет. Если определяется, что длина между двумя инфракрасными датчиками 206 больше заранее установленной длины, то управляющее устройство 3 определяет, что инфракрасный свет перекрывается в двух или более положениях каждой из ноги обучаемого 4 и ноги помощника 5. Другими словами, управляющее устройство 3 определяет, что на опоре 21 находится нога обучаемого 4 и нога помощника 5. Это случай, который показан, например, на фиг. 15. С другой стороны, если определяется, что длина между двумя инфракрасными датчиками 206 меньше либо равна заранее установленной длине, то управляющее устройство 3 определяет, что инфракрасный свет перекрывается в одном положении только ногой помощника 5. Другими словами, управляющее устройство 3 определяет, что на опоре 21 находится только нога помощника 5. Это случай, который показан, например, на фиг. 13.
[0119] Описанная выше заранее установленная длина может быть любым значением, которое достаточно большое для различения между длиной, на которой инфракрасный свет перекрывается ногой обучаемого 4 и ногой помощника 5, и длиной, на которой инфракрасный свет перекрывается только помощником 5. Предпочтительно, чтобы задавался размер ноги помощника 5.
[0120] Далее со ссылкой на фиг. 16 описывается конфигурация управляющей системы в системе 1 обучения ходьбе в четвертом варианте осуществления. Как показано на фиг. 16, четвертый вариант осуществления отличается от первого варианта осуществления в том, что у беговой дорожки 2 опора 21 не содержит множество датчиков 201 нагрузки, а верхний компонент 28 опоры содержит множество инфракрасных датчиков 206.
[0121] Каждый из множества инфракрасных датчиков 206 отправляет в управляющее устройство 3 уведомление о состоянии, которое указывает, перекрывается ли инфракрасный свет. Четвертый вариант осуществления отличается от первого варианта осуществления тем, что блок 31 получения значения датчика принимает уведомление о состоянии, отправленное из множества инфракрасных датчиков 206, вместо информации о распределении нагрузки, отправленной из множества датчиков 201 нагрузки.
[0122] В четвертом варианте осуществления блок 32 определения аномалии на основе уведомления о состоянии, принятого блоком 31 получения значения датчика, определяет, находятся ли на опоре 21 три ноги или более. То есть блок 32 определения аномалии определяет, перекрывается ли инфракрасный свет в трех или более положениях. Если определяется, что инфракрасный свет не перекрывается в трех или более положениях, то блок 32 определения аномалии определяет, что состояние является нормальным. С другой стороны, если определяется, что инфракрасный свет перекрывается в трех или более положениях, то блок 32 определения аномалии определяет, что состояние является аномальным.
[0123] В четвертом варианте осуществления заранее сохраняется информация 304 об интервале датчиков, а не информация 302 о размере датчиков. К тому же, в четвертом варианте осуществления информация 301 о положении датчиков является информацией, указывающей положения множества инфракрасных датчиков 206 на верхнем компоненте 28 опоры.
[0124] Поэтому блок 32 определения аномалии использует информацию 301 о положении датчиков и информацию 304 об интервале датчиков для определения, перекрывается ли инфракрасный свет в трех или более положениях. Например, на основе информации 301 о положении датчиков блок 32 определения аномалии определяет, размещаются ли последовательно инфракрасные датчики 206, у которых перекрывается инфракрасный свет. К тому же, при вычислении длины между двумя инфракрасными датчиками 206 блок 32 определения аномалии использует информацию 301 о положении датчиков для вычисления количества инфракрасных датчиков 206 между двумя инфракрасными датчиками 206. После этого блок 32 определения аномалии использует информацию 304 об интервале датчиков для вычисления длины, которая соответствует количеству инфракрасных датчиков 206, в качестве расстояния между двумя инфракрасными датчиками 206. То есть в качестве длины между двумя инфракрасными датчиками 206 вычисляется: (количество инфракрасных датчиков 206 между двумя инфракрасными датчиками 206+1) × длина между инфракрасными датчиками 206, указанная информацией 304 об интервале датчиков.
[0125] Чтобы идентифицировать положение инфракрасного датчика 206, информация 301 о положении датчиков для каждого из множества инфракрасных датчиков 206 создается путем ассоциации идентификатора, который однозначно идентифицирует инфракрасный датчик 206, с положением инфракрасного датчика 206, как в первом варианте осуществления. Каждый из инфракрасных датчиков 206 отправляет уведомление о состоянии с включенным в него идентификатором инфракрасного датчика 206. Это позволяет блоку 32 определения аномалии идентифицировать положение инфракрасного датчика 206, который отправил уведомление о состоянии, из включенного в уведомление о состоянии идентификатора на основе информации 301 о положении датчиков.
[0126] Информация 303 о размере ноги является такой же, как и в первом варианте осуществления. То есть информация 303 о размере ноги используется, когда описанная выше заранее установленная длина задается размером ноги помощника 5.
[0127] Хотя описан пример, в котором инфракрасные датчики 206 используются в качестве фотоэлектронных датчиков для измерения состояния наличия ноги, настоящее изобретение не ограничивается этим примером. Также можно использовать фотоэлектронные датчики отражательного типа, которые измеряют состояние наличия ноги с использованием света помимо инфракрасного света.
[0128] Как описано выше, четвертый вариант осуществления имеет множество инфракрасных датчиков 206 для измерения границы между ленточным транспортером 22 и опорой 21. Если инфракрасными датчиками 206 обнаруживается перекрытие инфракрасного света, то определяется, что на опоре 21 находится нога. Таким образом, аномальное состояние во время обучения ходьбе также можно обнаружить с помощью датчика помимо датчика 201 нагрузки.
[0129] К тому же, в четвертом варианте осуществления, если инфракрасный свет перекрывается только в одном положении или если инфракрасный свет вообще не перекрывается, то блок 32 определения аномалии может определить, что нога помощника 5 наступает на ленточный транспортер 22, и в результате на ленточном транспортере 22 находятся три ноги или более. Если блок 32 определения аномалии определяет, что на ленточном транспортере 22 находятся три ноги или более, то блок 33 управления транспортером и блок 34 управления роботом могут выполнить обработку в аномальном случае.
[0130] <Пятый вариант осуществления настоящего изобретения>
Далее описывается пятый вариант осуществления. В описании ниже такое же содержание, что и в первом варианте осуществления, по необходимости пропускается. В четвертом варианте осуществления, хотя описывается пример, в котором результат измерения, выданный инфракрасными датчиками 206, используется в качестве сущности для измерения состояния наличия ноги на опоре 21 или на ленточном транспортере 22 не посредством нагрузки, также можно использовать другую сущность измерения. В пятом варианте осуществления описывается пример, в котором состояние наличия ноги на опоре 21 или ленточном транспортере 22 измеряется с помощью камеры.
[0131] Со ссылкой на фиг. 17 описывается конфигурация системы 1 обучения ходьбе в пятом варианте осуществления. Как показано на фиг. 17, пятый вариант осуществления отличается от первого варианта осуществления в том, что беговая дорожка 2 имеет камеру 207 вместо множества датчиков 201 нагрузки. Для разъяснения признака пятого варианта осуществления на фиг. 17 не показаны обучаемый 4, помощник 5, робот 23, разгрузочное устройство 24 и поручень 26.
[0132] Камера 207 устанавливается так, чтобы следить сверху за опорой 21. Камера 207 устанавливается, например, на нижней части верхнего компонента 28 опоры, как показано на фиг. 17. Этот верхний компонент 28 опоры является, например, компонентом, который соединяет вертикальный компонент 27 опоры в правом переднем положении с вертикальными компонентами 27 опоры в правом заднем положении. Размещение камеры 207 не ограничивается проиллюстрированным на фиг. 17 при условии, что можно следить за опорой 21. Например, камера может размещаться на верхнем компоненте 29 опоры или на других компонентах на беговой дорожке 2.
[0133] Хотя на фиг. 17 показана только камера 207, которая следит за правой частью опоры 21, чтобы разъяснить размещение камеры 207, беговая дорожка 2 также имеет камеру 207, которая следит за левой частью опоры 21.
[0134] Далее со ссылкой на фиг. 18 описывается способ обнаружения аномалии в системе 1 обучения ходьбе в пятом варианте осуществления. Фиг. 18 - вид сверху, показывающий опору 21 и ленточный транспортер 22.
[0135] Как описано выше, беговая дорожка 2 имеет две камеры 207 для слежения за каждой из правой части опоры и левой части опоры 21. Поэтому каждая из правой части опоры и левой части опоры 21 включается в каждую область наблюдения двух камер 207.
[0136] Две камеры 207 снимают соответственно правую часть опоры и левую часть опоры 21. Управляющее устройство 3 распознает ногу на опоре 21 на основе результата, снятого двумя камерами 207. Для распознавания ноги может использоваться любая технология из общепринятых технологий распознавания изображений, например сопоставление с образцом.
[0137] Если три ноги или более не распознаются на основе результата, снятого камерой 207, то управляющее устройство 3 определяет, что на опоре 21 не находятся три ноги или более. В этом случае управляющее устройство 3 определяет, что состояние нормальное. С другой стороны, если три ноги или более распознаются на основе результата, снятого камерой 207, то управляющее устройство 3 определяет, что на опоре 21 находятся три ноги или более. В этом случае управляющее устройство 3 определяет, что состояние аномальное.
[0138] Далее со ссылкой на фиг. 19 описывается конфигурация управляющей системы в системе 1 обучения ходьбе в пятом варианте осуществления. Как показано на фиг. 19, пятый вариант осуществления отличается от первого варианта осуществления в том, что у беговой дорожки 2 опора 21 не содержит множество датчиков 201 нагрузки, а верхний компонент 28 опоры содержит две камеры 207.
[0139] Каждая из двух камер 207 отправляет в управляющее устройство 3 графическую информацию, которая указывает изображение опоры 21, сформированное путем съемки. В пятом варианте осуществления блок 31 получения значения датчика принимает графическую информацию, отправленную из двух камер 207, вместо информации о распределении нагрузки, отправленной из множества датчиков 201 нагрузки.
[0140] В пятом варианте осуществления блок 32 определения аномалии анализирует изображение, которое указывает графическую информацию, принятую блоком 31 получения значения датчика, чтобы определить, находятся ли на опоре 21 три ноги или более. То есть блок 32 определения аномалии определяет, распознаются ли три ноги или более. Если три ноги или более не распознаются, то блок 32 определения аномалии определяет, что состояние нормальное. С другой стороны, если распознаются три ноги или более, то блок 32 определения аномалии определяет, что состояние аномальное.
[0141] Как описано выше, в пятом варианте осуществления для съемки опоры 21 предоставляется по меньшей мере одна камера 207. Если нога распознается с помощью анализа изображения, сформированного путем съемки камерой 207, то блок 32 определения аномалии определяет, что на опоре 21 находится нога. Таким образом, аномальное состояние во время обучения ходьбе также можно обнаружить с помощью датчика (датчика изображений) помимо датчиков 201 нагрузки.
[0142] Способ для распознавания ноги посредством камеры 207 не ограничивается описанным выше примером. Например, как показано на фиг. 20, при использовании прозрачного или полупрозрачного материала в качестве материала опоры 21 камера 207 может размещаться так, что снимается нижняя поверхность опоры 21. То есть камера 207 размещается таким образом, что камера 207, предоставленная под опорой 21, снимает изображение над ней.
[0143] Настоящее изобретение не ограничивается описанными выше вариантами осуществления и может быть изменено по необходимости без отклонения от его сущности.
Реферат
Изобретения относятся к медицинской технике. Система обучения ходьбе содержит ленточный транспортер, на котором ходит обучаемый, пару опор, датчик для измерения состояния наличия ноги на опоре и управляющее устройство. Опоры расположены на обеих сторонах ленточного транспортера - по одной опоре на каждой стороне, чтобы позволить помощнику поставить на них каждую ногу. Управляющее устройство сконфигурировано для определения на основе результата измерения от датчика, находятся ли на опоре три ноги или более, и выполнения управления, когда управляющее устройство определяет, что находятся три ноги или более. В альтернативном варианте осуществления изобретения датчик сконфигурирован для измерения состояния наличия ноги на ленточном транспортере, а управляющее устройство - для определения на основе результата измерения от датчика, находятся ли на ленточном транспортере три ноги или более, и выполнения управления, когда управляющее устройство определяет, что находятся три ноги или более. Достигается повышение точности определения состояния потери равновесия у обучаемого или помощника во время обучения ходьбе. 2 н. и 8 з.п. ф-лы, 24 ил.
Комментарии