Манипулятор - SU1627401A1
Код документа: SU1627401A1
Чертежи


Описание
О 6
19
15 U
17
11
19

Реферат
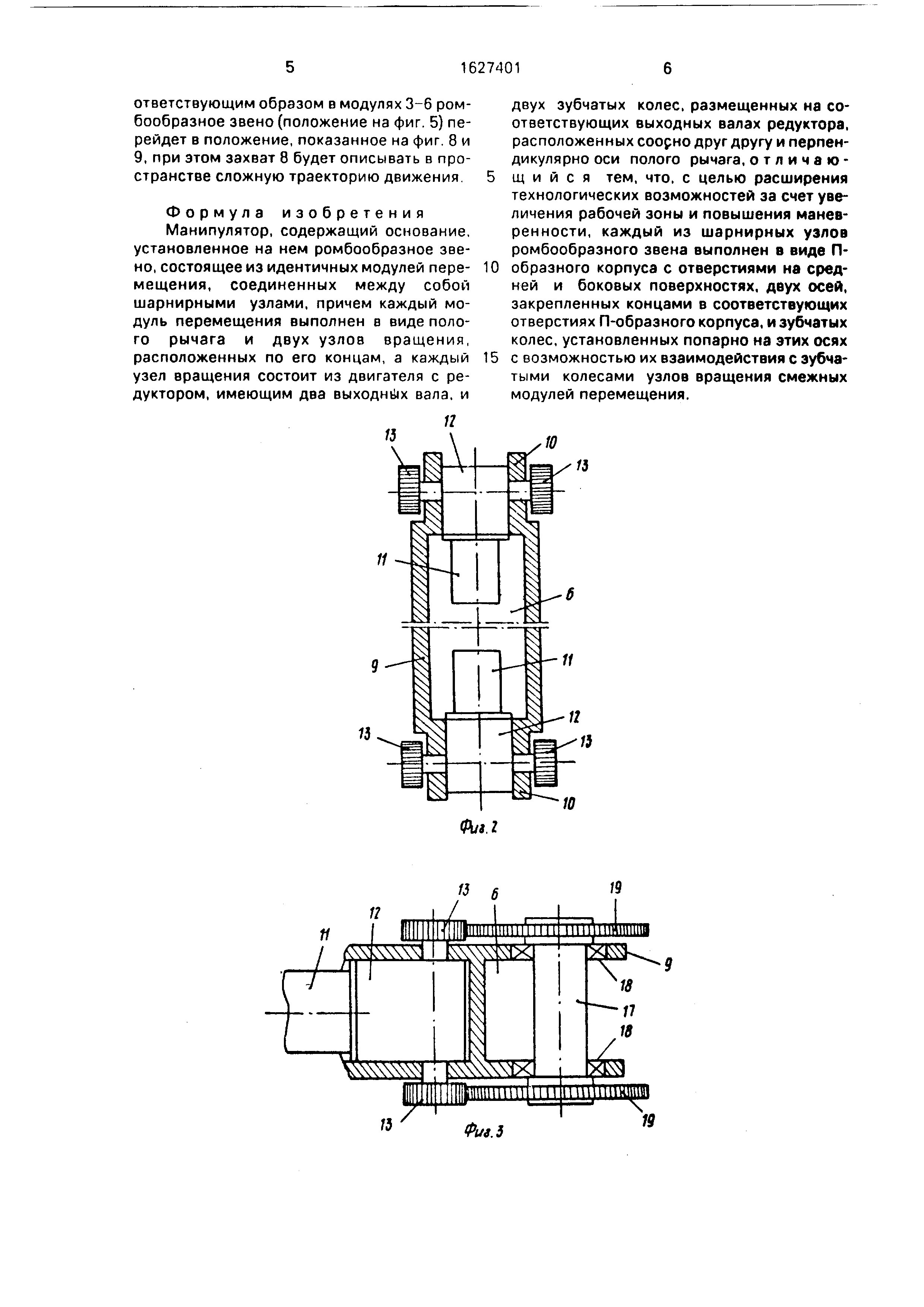
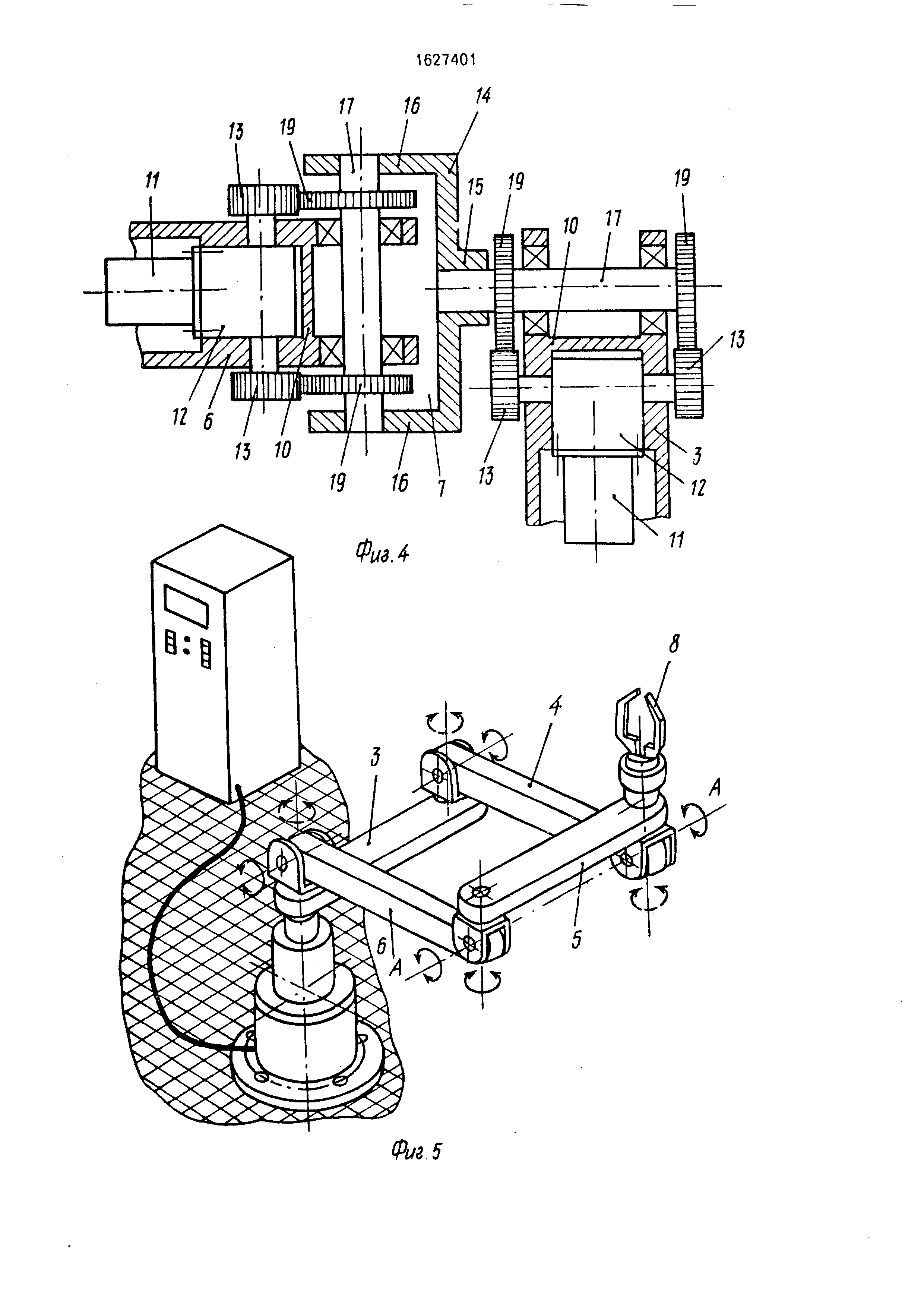
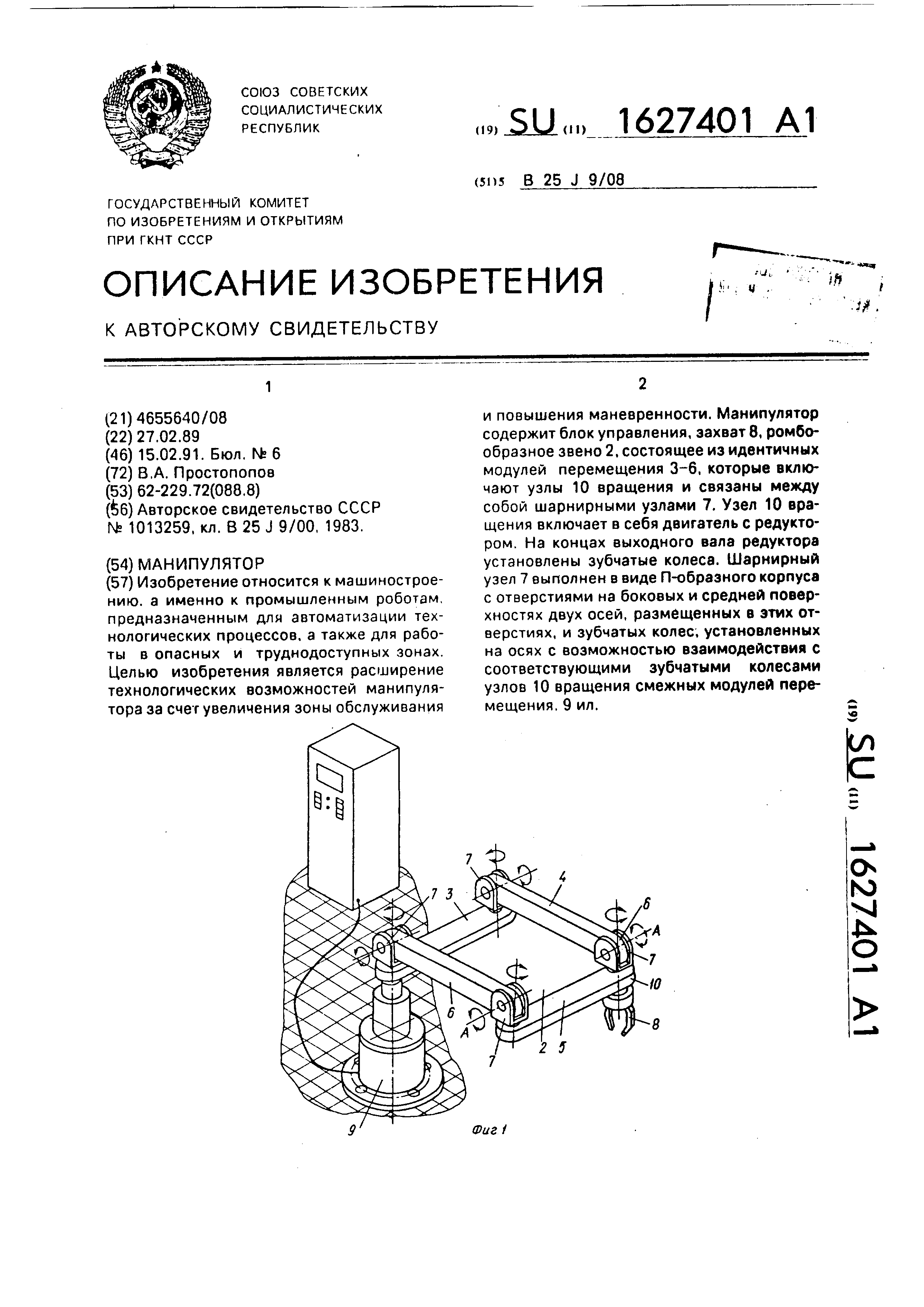
Изобретение относится к машиностроению , а именно к промышленным роботам, предназначенным для автоматизации технологических процессов, а также для работы в опасных и труднодоступных зонах. Целью изобретения является расширение технологических возможностей манипулятора за счет увеличения зоны обслуживания и повышения маневренности. Манипулятор содержит блок управления, захват 8, ромбо- образное звено 2, состоящее из идентичных модулей перемещения 3-6, которые включают узлы 10 вращения и связаны между собой шарнирными узлами 7. Узел 10 вращения включает в себя двигатель с редуктором . На концах выходного вала редуктора установлены зубчатые колеса. Шарнирный узел 7 выполнен в виде П-образного корпуса с отверстиями на боковых и средней поверхностях двух осей, размещенных в этих отверстиях , и зубчатых колес, установленных на осях с возможностью взаимодействия с соответствующими зубчатыми колесами узлов 10 вращения смежных модулей перемещения . 9 ил.
Формула
Комментарии