Манипулятор с программным управлением - SU510362A1
Код документа: SU510362A1
Чертежи


Описание
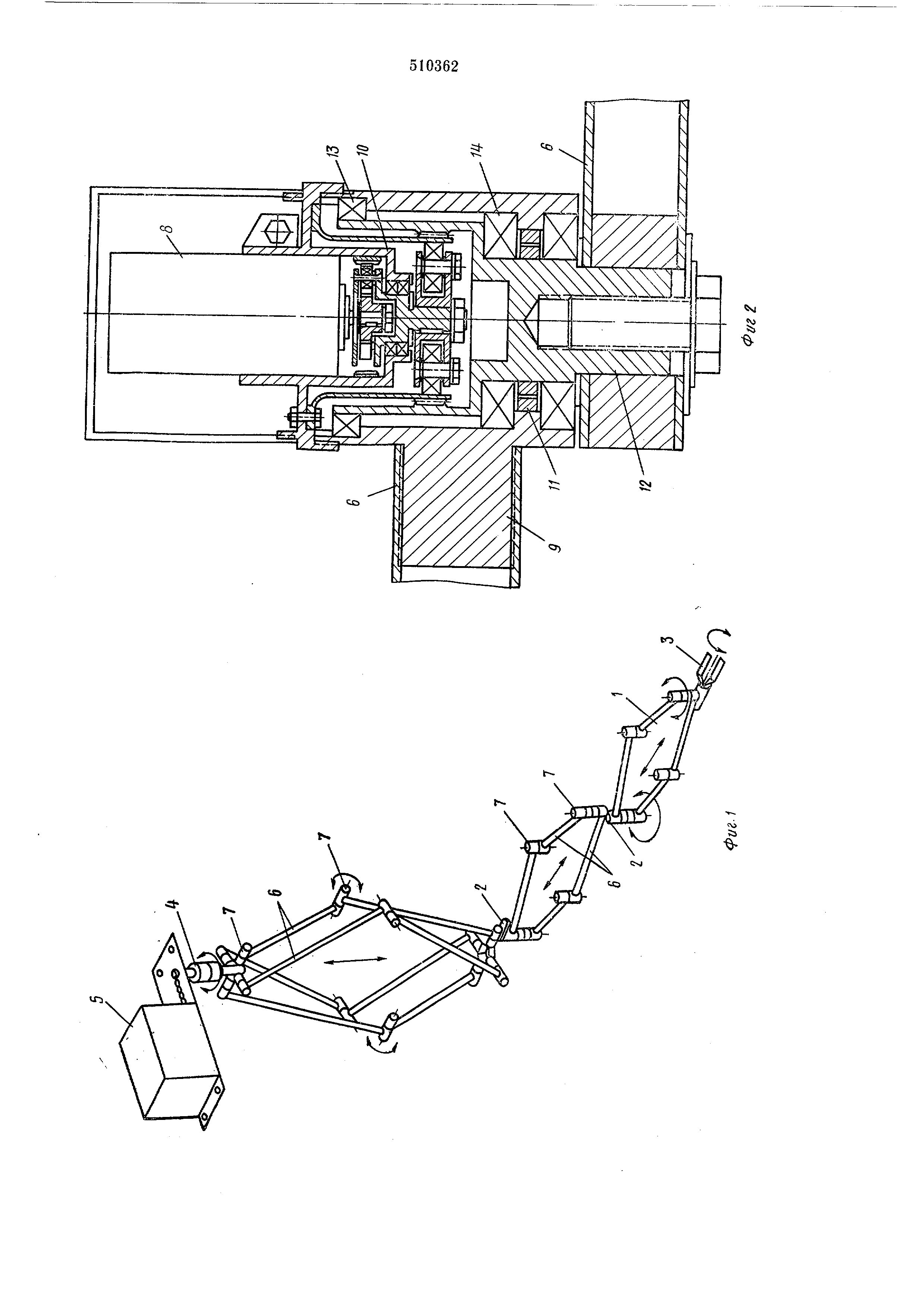
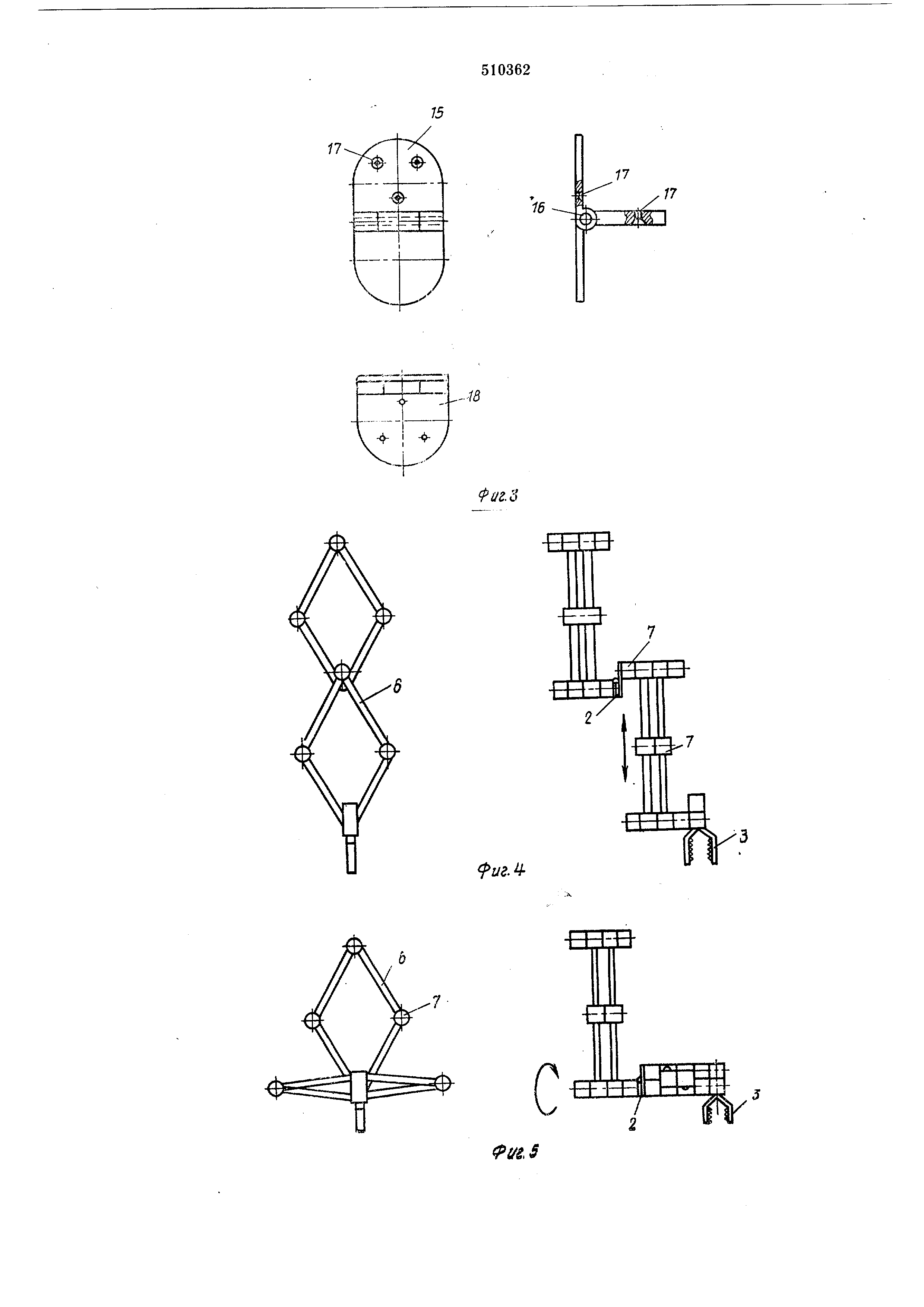
торых две пары сопряженных }злов враще ния, служащих для сочленения с другими звеньями, захватом или устройством жесткого крепления механизма соединены жестко меж ду собой так, что их оси вращения лежат на одной прямой, а два песопряженных узла вращения, находящихся на другой диагонали ромбообразного звена, связаны с ними пассивными рычагами. Причем выходные валы узлов вращения укреплены относительно своих корпусов с помощью радиальных и радиальноупорпых подшипников так, что все оси активных узлов вращения расположены перпендикулярно к плоскости перемещения ромбообразпого звена. Это приводит к повышению надежности и точности работы, а таюке к разгрузке тяг двигателей горизонтально ориентированных звеньев. Ромбообразные звенья соединены между собой пассивным узлом ориентирования - щарпиром с тлом поворота 90°. Соосно с одним или несколькими ромбообразными звеньями могут быть установлены дополнительные ромбообразные звенья в другой плоскости, что обеспечивает увеличение жесткости составного звена за счет работы рычагов одного звена на изгиб, а рычагов другого звена на сжатие. На фиг. 1 схематически изображен предлагаемый манипулятор, общий вид; на фиг. 2 - активный узел вращения; на фиг. 3 - пассивный узел ориентации; па фиг. 4-8 изображены соседние звенья в различные фазы работы , вид спереди и вид сбоку; на фиг. 9 показана структурная блок-схема управления. Манипулятор состоит из ромбообразных звеньев 1, соединенных между собой пассивными узлами ориентирования 2; захвата 3, устройства жесткого крепления механизма 4 и блока зправления 5. Каждое ромбообразное звено состоит из четырех пассивных рычагов 6 и шести активных узлов вращения 7, из которых две пары сопряженных узлов вращения, сл жащих для сочленения с другими ромбообразными звеньями , захватом или устройством жесткого крепления механизма соединены жестко между собой так, что их оси вращения лежат на одной прямой, а два несопряженных узла вращения, находящихся па другой диагонали ромбообразного звена, связаны с ними пассивными рычагами . Все оси узлов вращения расположены перпендикулярно к плоскости перемещения ромбообразного звена. Пассивные рычаги могут быть выполнены полыми для размещения в них моптажных соедипительпых приборов. Активный узел вращения 7 состоит (фиг. 2) из электродвигателя 8, закрепленного в корпусе 9, редуктора 10, фазового датчика перемещения 11, установленного на выходном валу 12, передающего усилия па жестко укрепленный па нем рычаг 6 с помощью радиальных 13 и радиальпо-упорпых 14 подшипников. Пассивный узел ориентирования 2 ромбообразных звеньев включает (фиг. 3) кронштейн 15, жестко соединенный одннм концом с парой сопряженных узлов вращения 7 одного ромбообразпого звена, а другим концом через ось ориентирования 16 с нарой сопряженных узлов вращения другого соседнего звена 1; фиксатор 17 и упор 18. Угол вращения вокруг оси ориентирования, лежащей в плоскости первого ориентирующего звена и перпендикулярной к оси его продольного перемещения, ограничен упором 18 и равен 90°. Сооспо любому ромбообразному звену может быть установлено дополнительное ромбообразное звено в другой плоскости (или несколько звеньев), приводящее к увеличению жесткости и мощности составного звепа. На фиг. 1 показана установка дополнительного звепа СООСПО первому со стороны устройства крепления звену. Блок управлепия 5 состоит из задающего устройства 19 (фиг. 9), соединенных спим регистра координаты 20 и регистра адреса 21, дешифратора 22, соединенного с выходом регистра адреса, преобразователей код-фаза 23, входы которых соединены с регистром координаты , а выходы - с соответствующей группой узлов управления 24 активпыми узлами вращения 7, причем запись в преобразователи код-фаза определяется подсоединенным к ним дешифратором адреса. Узлы управлепия 24 объединены в группы продольного перемещения звена, статического режима удержания звена, бокового перемещения звена, ориентирования последующего звена. Группа продольного перемещения звена состоит из шести узлов управлепия, соответствующих четырем сопряженным активным узлам вращения 7 и двум несопряженным активным узлам вращения. Группа статического режима удержания звена состоит из четырех узлов управления, соответствующих двум сопряжеппым активным узлам вращепия и двум несопряженным активным узлам вращения. Группа бокового перемещения звена и группа ориентирования последующего звена состоят каждая из двух узлов управления, соответствующих двум сопряженным активным узам вращепия, паходящимся в начале звена 1: и в конце звепа 1, считая со стороны устойства жесткого крепления механизма 4. При такой структуре манипулятора ромбобразные звенья 1 преобразуют угловые двиения пассивных рычагов 6 в поступательное родольное или боковое перемещение каждоо звепа. При этом достигается увеличение очности работы манипулятора. Это происхоит за счет механической обратной связи, существляемой через пассивные рычаги 6 вена, которое становится замкнутым контуом , перераспределяющим тяговые усплпя ходящих в него активных узлов вращения 7. Надежпоеть манипулятора повышается ввиу возможности работы ромбообразпых звеньв при полном отказе активного узла вращеия любой группы звена 1 за счет перехода ктивного узла в режим пассивной работы и
перераспределения тяги на остальные активные узлы вращения группы.
Ориентирование ромбообразных звеньев 1 в вертикальной или горизонтальной плоскости производится с помон1,ью пассивного узла ориентирования 2. Предположим, что в первый момент времени какие-либо два соседних звена 1 ориентированы в вертикальной плоскости (фиг. 4). Для перевода, например, последнего звена с грузом в горизонтальную плоскость необходимо поднять груз (фиг. 5). Затем с помощью смежных узлов вращения 7 предыдущего звена 1 производится вращение последнего ориентируемого звена 1 на 180° (фиг. 6), после чего под действием собственного веса ориентируемого звена и веса перемещаемого тела ориентируемое звено принимает горизонтальное положение, развернувшись вокруг оси 16 на 90° (фиг. 7). На фиг. 8 показано положение объекта носле продольного перемещепия горизонтально ориентированного звена 1.
Длина кронштейна 15 пассивного узла ориентирования 2 выбрана, исходя из того, чтобы центр тяжести перемещаемого объекта после полного сокращения ориентируемых звеньев лежал ближе к оси вращения сопряженных узлов ориентирующего звена 1, что приводит к уменьшению длины плеча, образованного к моменту вращения ориентируемых звеньев, и, следовательно, к меньшей требуемой мощности , затрачиваемой сопряженными узлами ориентирующего звена.
При переводе какого-либо одного промежуточного звена 1 из вертикального положения в горизонтальное с сохранением вертикальной ориентации последующего звена 1 производится вращение промежуточного ориентируемого звена в одном направлении на 180° при одновременном встречном вращении последующего звена тоже на 180°.
При переводе звена 1 из горизонтального положения в вертикальное с сохранением горизонтальной ориентации промежуточного звена 1 производится сжатие всех звеньев, находяшчхся в горизонтальном положении, и перевод их в другую плоскость, после чего осуществляется вран1ение ориентируемого звена в одном направлении иа 180° при одновременном встречном вращении промежуточного звена тоже на 180° для сохранения его горизонтальной ориентации.
Составное звено, состояшее из двух соосных ромбообразных звеньев 1, приводит как к увеличению мош.ности, так и к увеличению жесткости полученной конструкции составного звена за счет работы рычагов одного звена на изгиб, а рычагов другого на сжатие.
Управление механизмом манипулятора осуществляется (фиг. 9) путем выдачи задающим
устройством 19 блока управления 5 кода координаты и адреса соответственно в регистр 20 и регистр 21. В зависимости от заданного адреса группы узлов вращения из регистра координаты 20 считывается информация в соответствующие преобразователи код-фаза 23, которые выдают информацию в соответствующие узлы управления 24. При этом в преобразователи код-фаза узлов управления, соответствующих сопряженным узлам вращения 7, информация передается прямым кодом, а в преобразователи код-фаза узлов управления, соответствующих несопряженным узлам вращения , - обратным кодом, сдвинутым на один
разряд в сторону старщих разрядов. Это возможно ввиду того, что максимальное число, записываемого в регистр координаты, выбрано соответствующим максимальному углу перемещения рычагов звена 1, равному 180°. Поэтому при записи прямого кода Л„ в преобразователи код-фаза, соответствующие сопряженным узлам вращения 7. в преобразователи код-фаза, соответствующие песопряжеиным узлам 7. требуется записать код Vo. определяемый
как Ло Дмакс-2Л п. Для реализации этого выражения достаточно с регистра координаты 20 снимать обратный код, сдвинутый на один разряд в сторону етарщих разрядов.
30
Формула, изобретения
1. Манипулятор с программным управлением , многозвенная рука которого снабжена захватом и поворотно связана с основанием, несущим блок управления, отличающийся тем, что, с целью упроцдения конструкции, каждое звено механической руки представляет собой четыре рычага, соединенных в виде ромба с помощью плести активных узлов вращения , из которых две пары сопряженных узлов вращения, служащих для соединения с другими звеньями, за.хватол или основанием, соединены между собой таким образом, что их оси вращения па одной прямой, а два
несопряженных узла врапсния, находящихся на другой диагонали ромба, связаны с ними рычагами, причем выходные валы узлов вращения укреплены относительно своих корпусов с помощью радиальных и радиально-упорных подшипников так, что все оси активных узлов вращения расположены перпендикулярно к плоскости перемещения звена.
2.Манипулятор по п. 1, отличающийся тем, что звенья механической руки соединены
щарнирами с углом поворота 90°.
3.Манипулятор по пп. 1 и 2, отличающийся тем , что одно или несколько звеньев выполнены сдвоенными таким образом, что одни рычаги работают на сжатие, а другие -
на изгиб.
j
%
П
17
17
16
-Щ КЖ1


Реферат
Формула
Комментарии