Манипулятор - SU488388A3
Код документа: SU488388A3
Чертежи
Описание
Изобретение относится к автоматическим устройствам, механизирующим вспомогательные работы при сварке, монтаже, сверлении, погрузке и разгрузке, перевозке, эмалировании и т. п.
Известен манипулятор, механическая рука которого с вращающимся держателем и запястьем выполнена из связанных локтевым суставом плеча и предплечья и шарнирно соединена с поворотным цоколем.
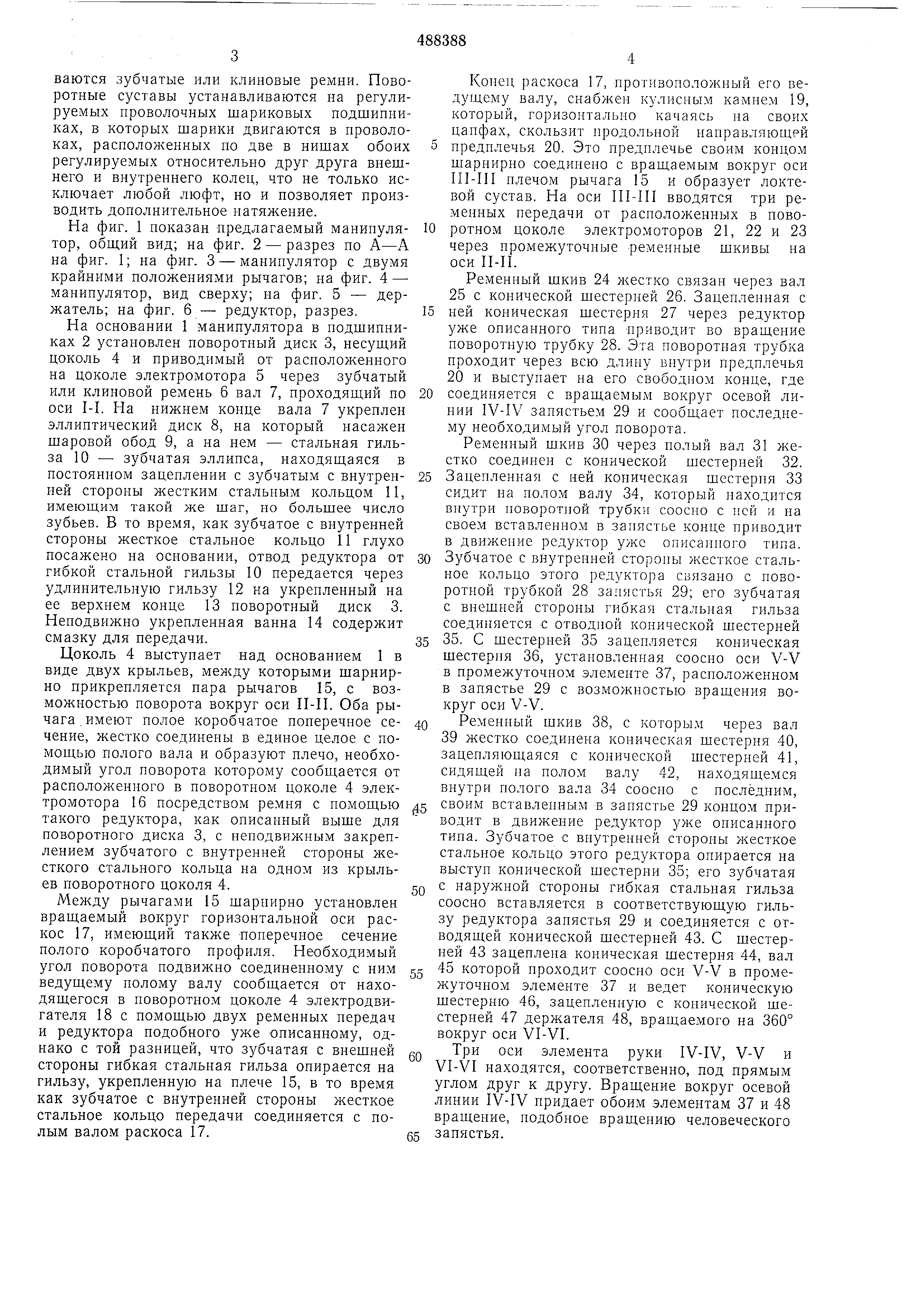
С целью упрощения конструкции держатель предлагаемого манипулятора установлен на турели и его кинематическая цепь составлена из трех пар конических шестерен и двух редукторов, которые размещены один в другом и расположены в запястье, образованном концом новоротной трубки предплечья, и получают движение от электродвигателей через клиноременные передачи и конические шестерни , установленные в локтевом суставе. Само запястье получает движение от электродвигателя через клиноременную передачу, конические шестерни и редуктор. Связь редукторов , помещенных в запястье, с передачами , установленными в локтевом суставе, и с редуктором, осуществляющим привод запястья , выполнена в виде помещенных одна в другую трубок, расположенных в нредплечье . На плече шарнирно установлен раскос , входящий другим своим концом в продольную направляющую предплечья, и приводимый в движение электродвигателем через ременную передачу и редуктор. Раскос шарнирно связан со штоком пневмоцплиндра, шарнирно установленного на поворотном цоколе . Это повышает точность движений при вспомогательных работах за счет того, что усиленная раскосом свободно несущая длина предплечья укорачивается и обеспечивается
лучщая устойчивость, которая сохраняется даже при увеличении радиуса подъема, опускания (внлоть до уровня днища) и вылета. Этим достигается и снижение крутящего момента на ведущем валу поворотных сустаВОВ , что позволяет подвергать руку высоким нагрузкам.
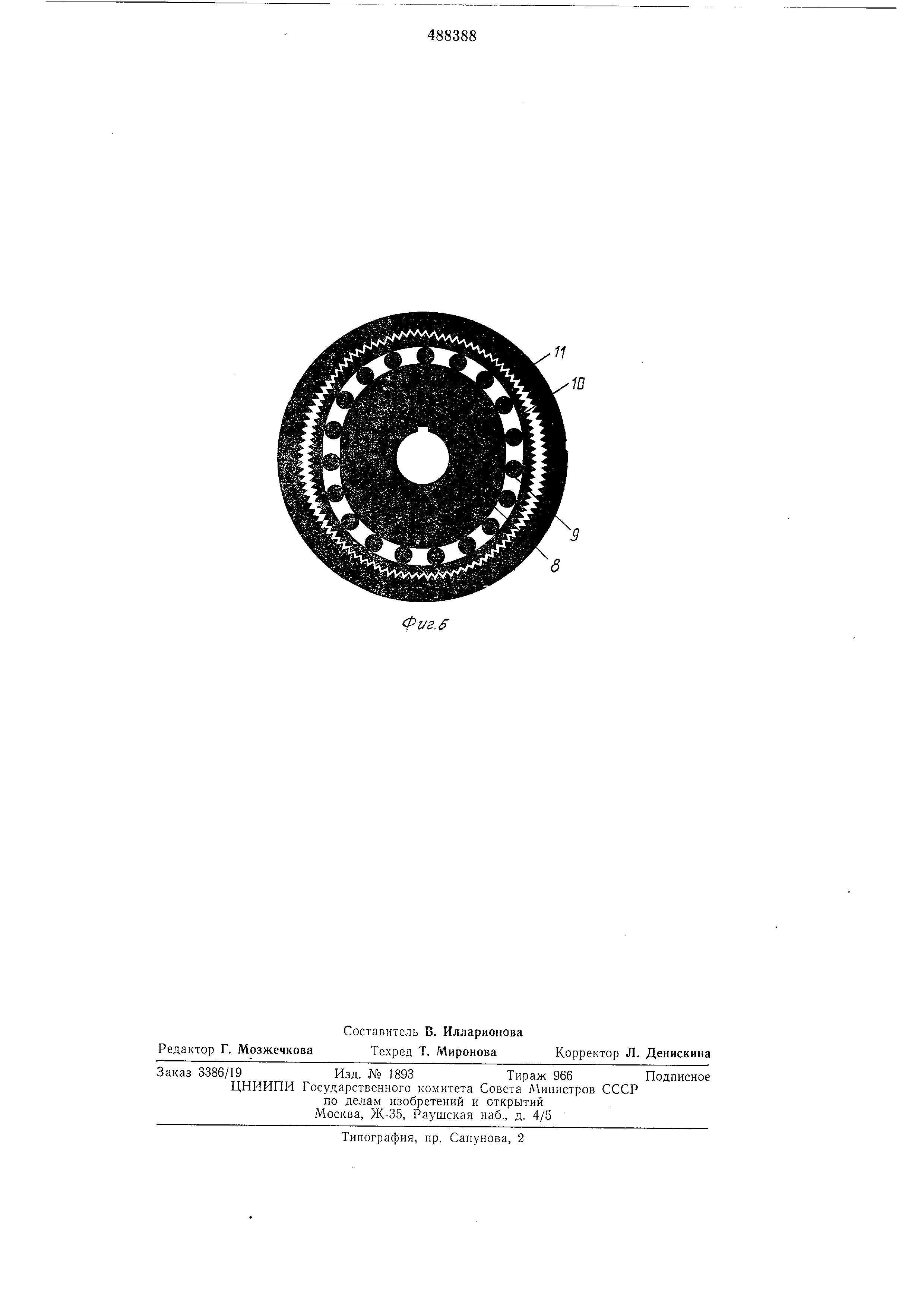
Редукторы, используемые в манипуляторе, выполнены в виде установленного на валу эллиптического диска с насажденными на него шариковым ободом и гибкой зубчатой с внешней стороны стальной гильзой, зубья которой , лежашие в зоне большой оси эллипса, постоянно находятся в заценлении с зубьями зубчатого с внутренней стороны жесткого
стального кольца, имеющего такой же шаг зацепления, но большее число зубьев. Редукторы устанавливаются соосно вращаемым несущим валом рычагов, чем обеспечивается простая компактная конструкция. Между редуктором и электродвигателем предусматриваются зубчатые или клиновые ремни. Поворотные суставы устанавливаются на регулируемых ироволочных шариковых подшипниках , в которых шарики двигаются в проволоках , расположенных по две в нишах обоих регулируемых относительно друг друга внешнего и внутреннего колец, что не только исключает любой люфт, но и позволяет производить дополнительное натяжение.
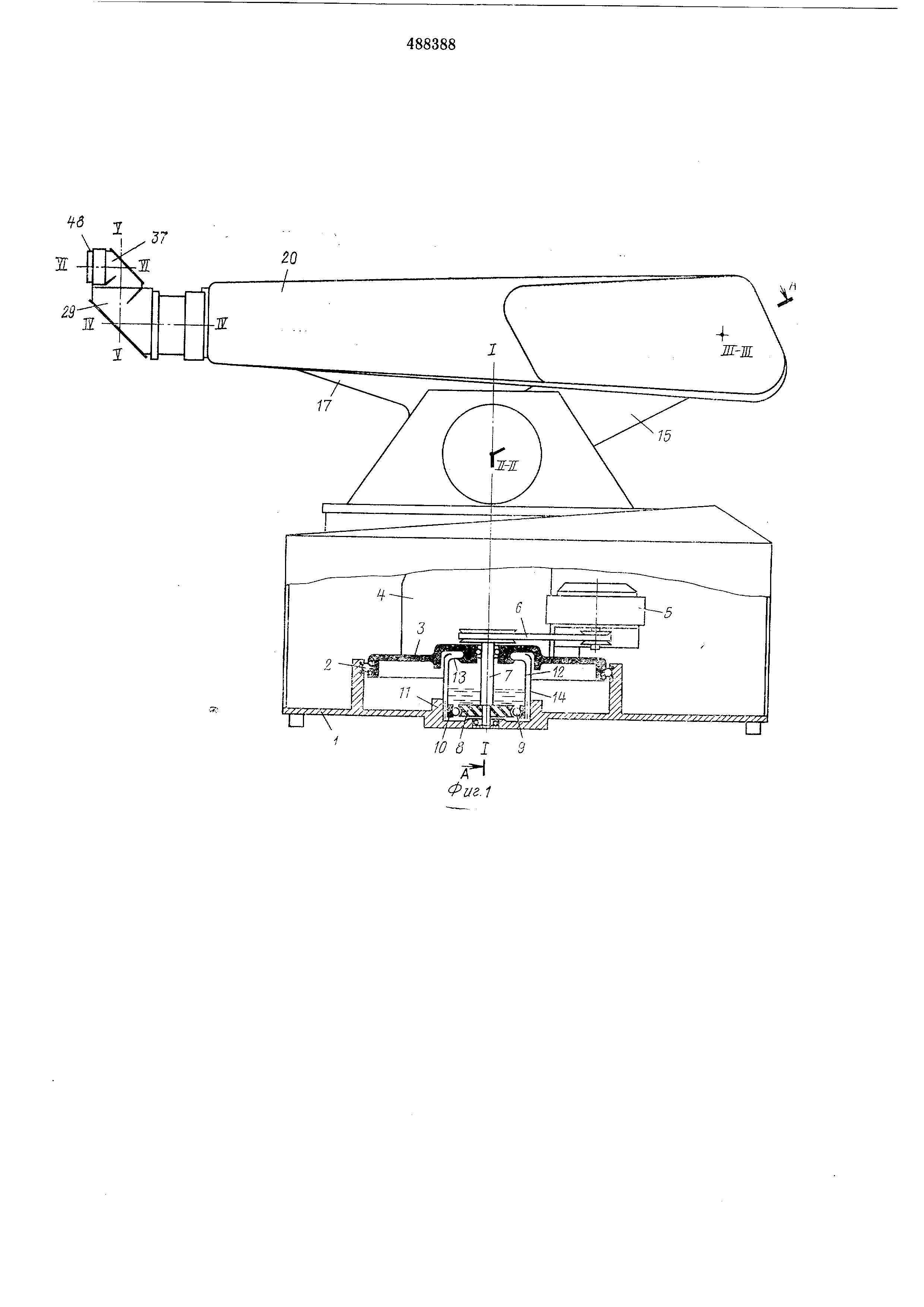
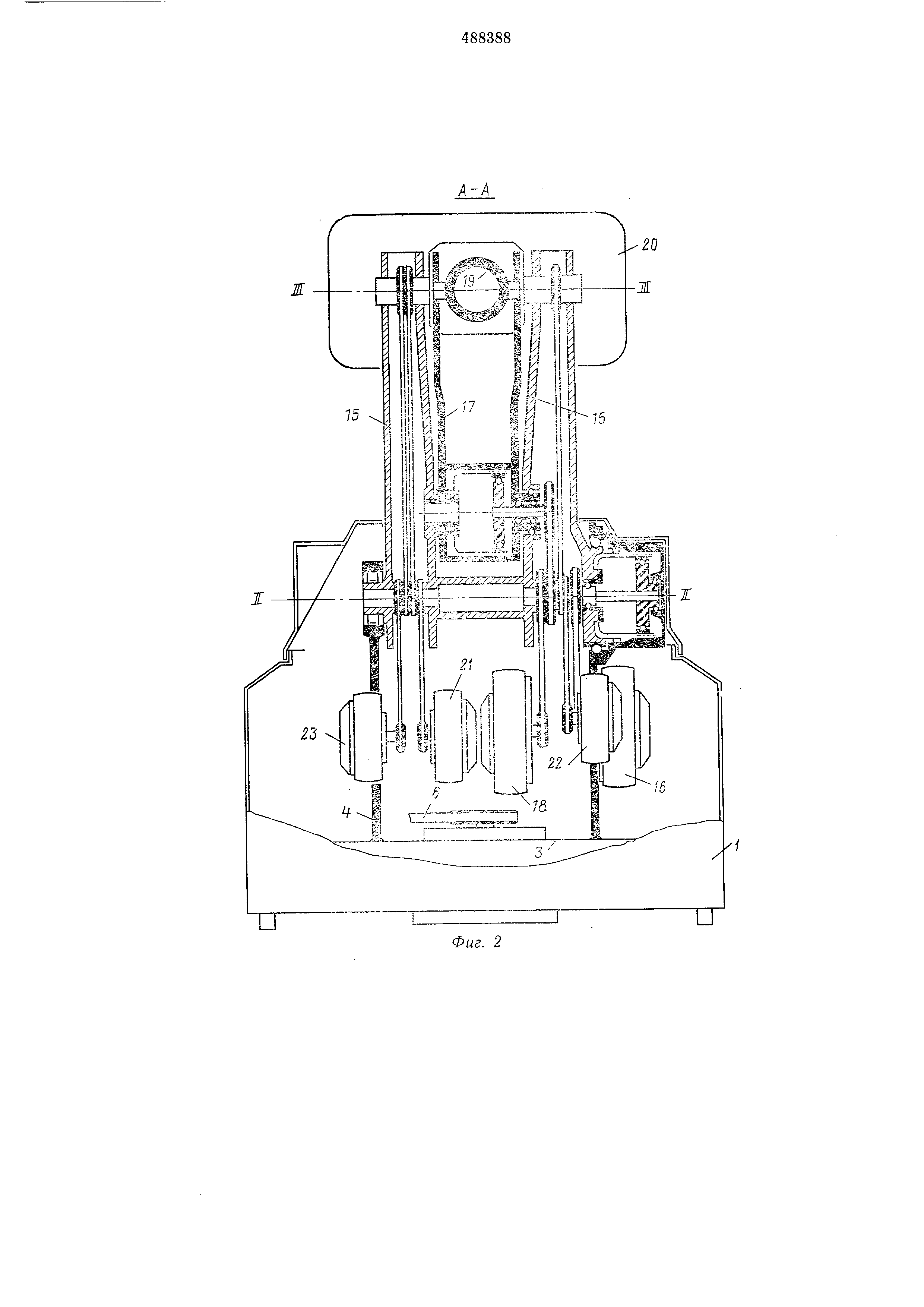
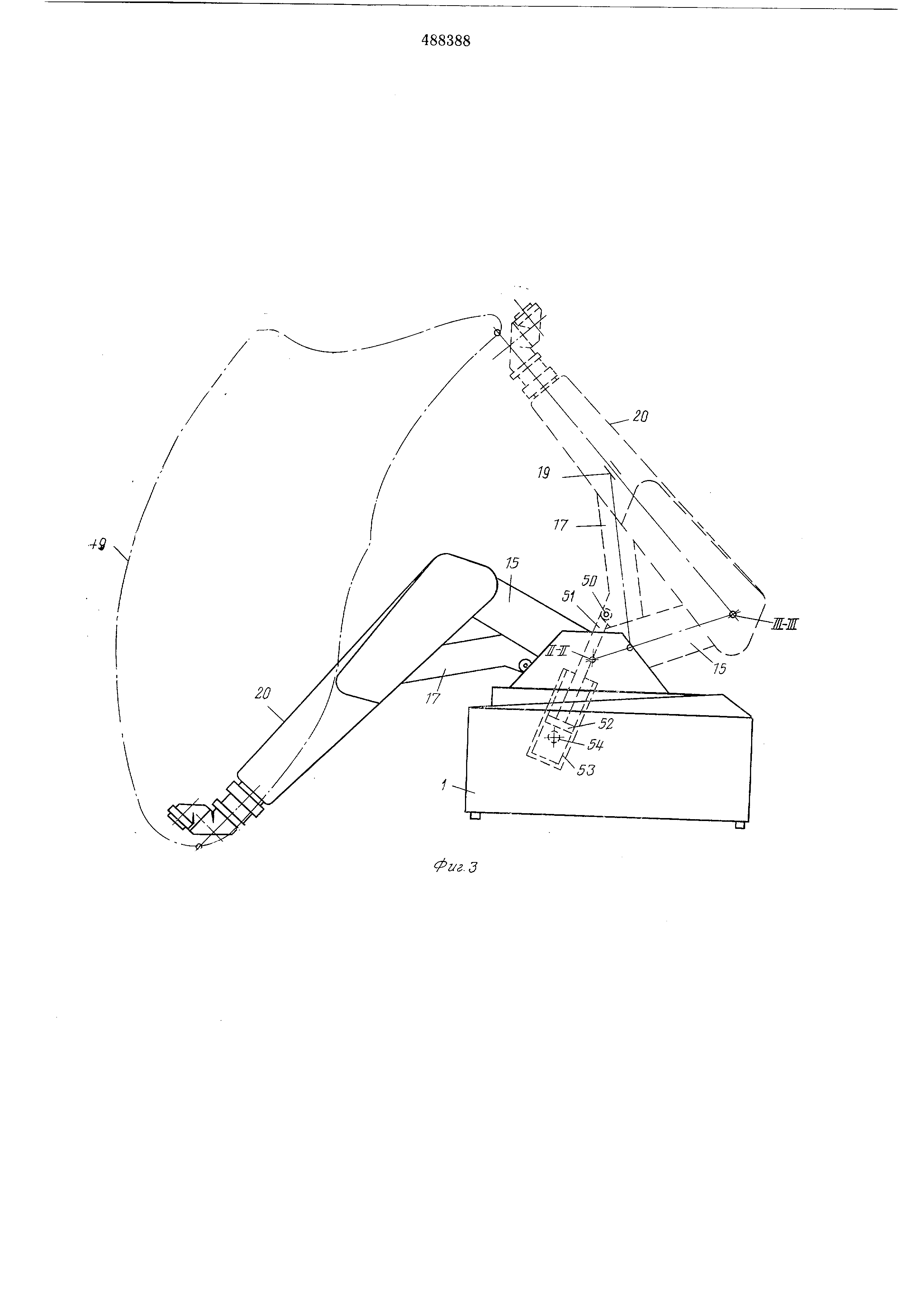
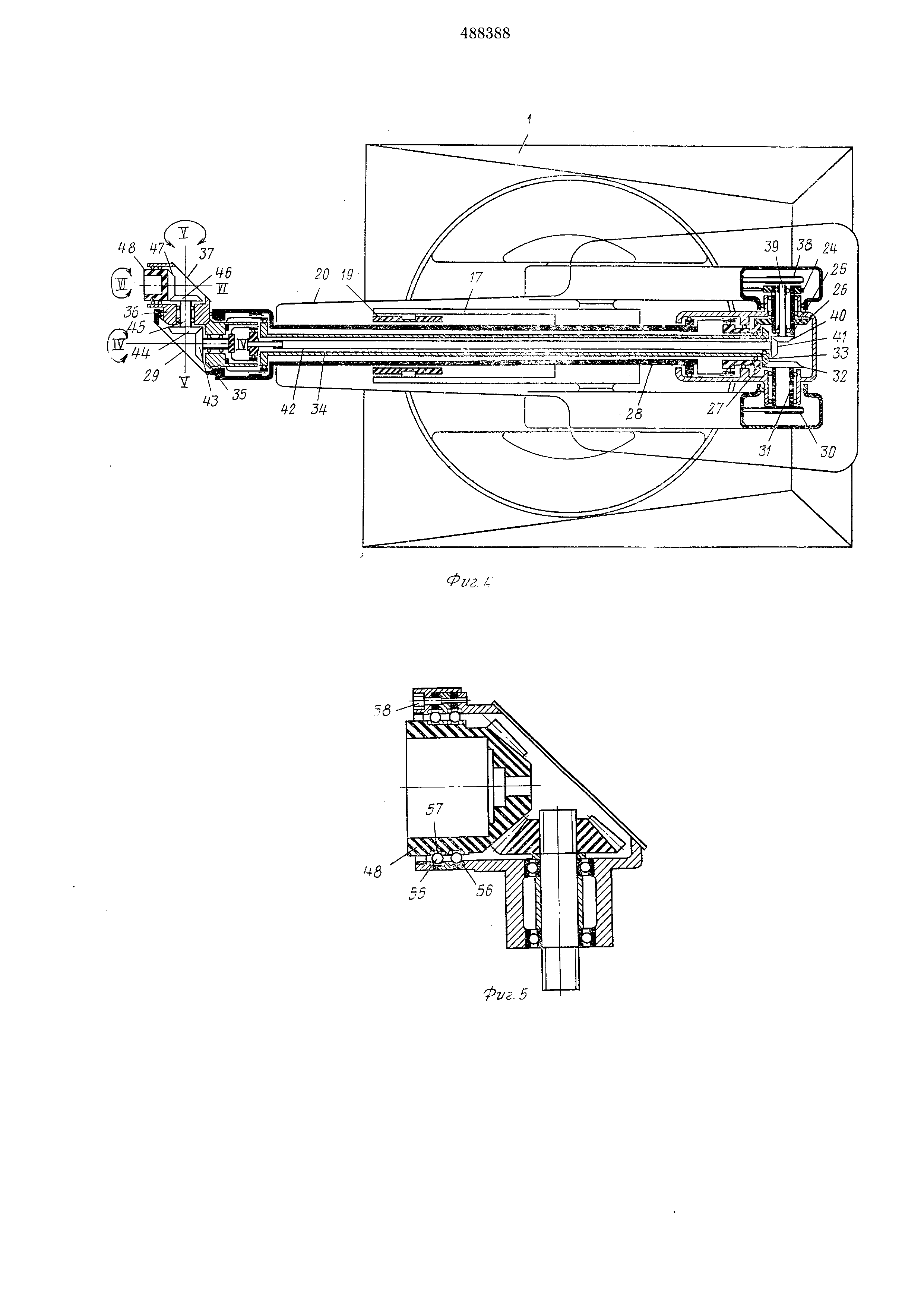
На фиг. 1 показан предлагаемый манипулятор , общий вид; на фиг. 2 - разрез по А-А на фиг. 1; на фиг. 3 - манипулятор с двумя крайними положениями рычагов; на фиг. 4 - манипулятор, вид сверху; на фиг. 5 - держатель; на фиг. 6 - редуктор, разрез.
На основании 1 манипулятора в подшипниках 2 установлен поворотный диск 3, несуш,ий цоколь 4 и приводимый от расположенного на цоколе электромотора 5 через зубчатый или клиновой ремень 6 вал 7, проходяш,нй по оси I-I. На нижнем конце вала 7 укреплен эллиптический диск 8, на который насажен шаровой обод 9, а на нем - стальная гильза 10 - зубчатая эллипса, находящаяся в постоянном зацеплении с зубчатым с внутренней стороны жестким стальным кольцом 11, имеющим такой же шаг, но большее число зубьев. В то время, как зубчатое с внутренней стороны жесткое стальное кольцо 11 глухо посажено на основании, отвод редуктора от гибкой стальной гильзы 10 передается через удлинительную гильзу 12 на укрепленный на ее верхнем конце 13 поворотный диск 3. Неподвижно укрепленная ванна 14 содержит смазку для передачи.
Цоколь 4 выступает над основанием 1 в виде двух крыльев, между которыми шарнирно прикрепляется пара рычагов 15, с возможностью поворота вокруг оси II-II. Оба рычага , имеют полое коробчатое поперечное сечение , жестко соединены в единое целое с помощью нолого вала и образуют плечо, необходимый угол поворота которому сообщается от расположенного в поворотном цоколе 4 электромотора 16 посредством ремня с помощью такого редуктора, как описанный выше для поворотного диска 3, с неподвижным закреплением зубчатого с внутренней стороны жесткого стального кольца на одном из крыльев новоротного цоколя 4.
Между рычагами 15 шарнирно установлен вращаемый вокруг горизонтальной оси раскос 17, имеющий также поперечное сечение полого коробчатого профиля. Необходимый угол поворота подвил но соединенному с ним ведущему полому валу сообщается от находящегося в поворотном цоколе 4 электродвигателя 18 с помощью двух ременных передач и редуктора подобного уже описанному, однако с той разницей, что зубчатая с внешней стороны гибкая стальная гильза опирается на гильзу, укрепленную на плече 15, в то время как зубчатое с внутренней стороны жесткое стальное кольцо передачи соединяется с полым валом раскоса 17.
Конец раскоса 17, противоположный его ведущему валу, снабжен кулисным камнем 19, который, горизонтально качаясь на своих цапфах, скользит продольной направляющей 5 предплечья 20. Это предплечье своим концом щарнирно соединено с вращаемым вокруг оси Ill-Ill плечом рычага 15 и образует локтевой сустав. На оси Ill-Ill вводятся три ременных передачи от расположенных в поворотном цоколе электромоторов 21, 22 и 23 через промежуточные ременные шкивы на оси IML
Ременный шкив 24 жестко связан через вал 25 с конической щестерней 26. Зацеплепная с 15 ней коническая щестерня 27 через редуктор уже описанного типа нриводит во вращение поворотную трубку 28. Эта поворотная трубка проходит через всю длину внутри предплечья 20 и выступает на его свободном конце, где
0 соединяется с вращаемым вокруг осевой линии IV-IV запястьем 29 и сообщает последнему необходимый угол поворота.
Ременный шкив 30 через полый вал 31 жестко соединен с конической шестерней 32.
5 Зацепленная с ней коническая шестерня 33 сидит на полом валу 34, который находится внутри поворот}юй трубки соосно с ней и на своем вставленном в запястье конце приводит в движение редуктор уже описанного типа.
0 Зубчатое с внутренней стороны жесткое стальное кольцо этого редуктора связано с поворотной трубкой 28 запястья 29; его зубчатая с внешней стороны гибкая стальная гильза соединяется с отводной конической шестерней
5 35. С шестерней 35 заценляется коническая шестерня 36, установленная соосно оси V-V в промежуточном элементе 37, расположенном в запястье 29 с возможностью вращения вокруг оси V-V.
Q Ременный шкив 38, с которым через вал 39 жестко соединена коническая шестерня 40, зацепляющаяся с конической шестерней 41, сидящей на полом валу 42, находящемся внутри полого вала 34 сооспо с последним,
5 своим вставленным в запястье 29 концом нриводит в движение редуктор уже описанного типа. Зубчатое с внутренней стороны жесткое стальное кольцо этого редуктора опирается на выстун конической шестерни 35; его зубчатая
Q с наружной стороны гибкая стальная гильза соосно вставляется в соответствующую гильзу редуктора запястья 29 и соединяется с отводящей конической шестерней 43. С шестерней 43 зацеплена коническая шестерня 44, вал
g 45 которой проходит соосно оси V-V в промежуточном элементе 37 и ведет коническую шестерню 46, зацепленную с конической шестерней 47 держателя 48, вращаемого на 360° вокруг оси VI-VI.
Q Три оси элемента руки IV-IV, V-V и VI-VI находятся, соответственно, под прямым углом друг к другу. Вращение вокруг осевой линии IV-IV придает обоим элементам 37 и 48 вращение, нодобное вращению человеческого
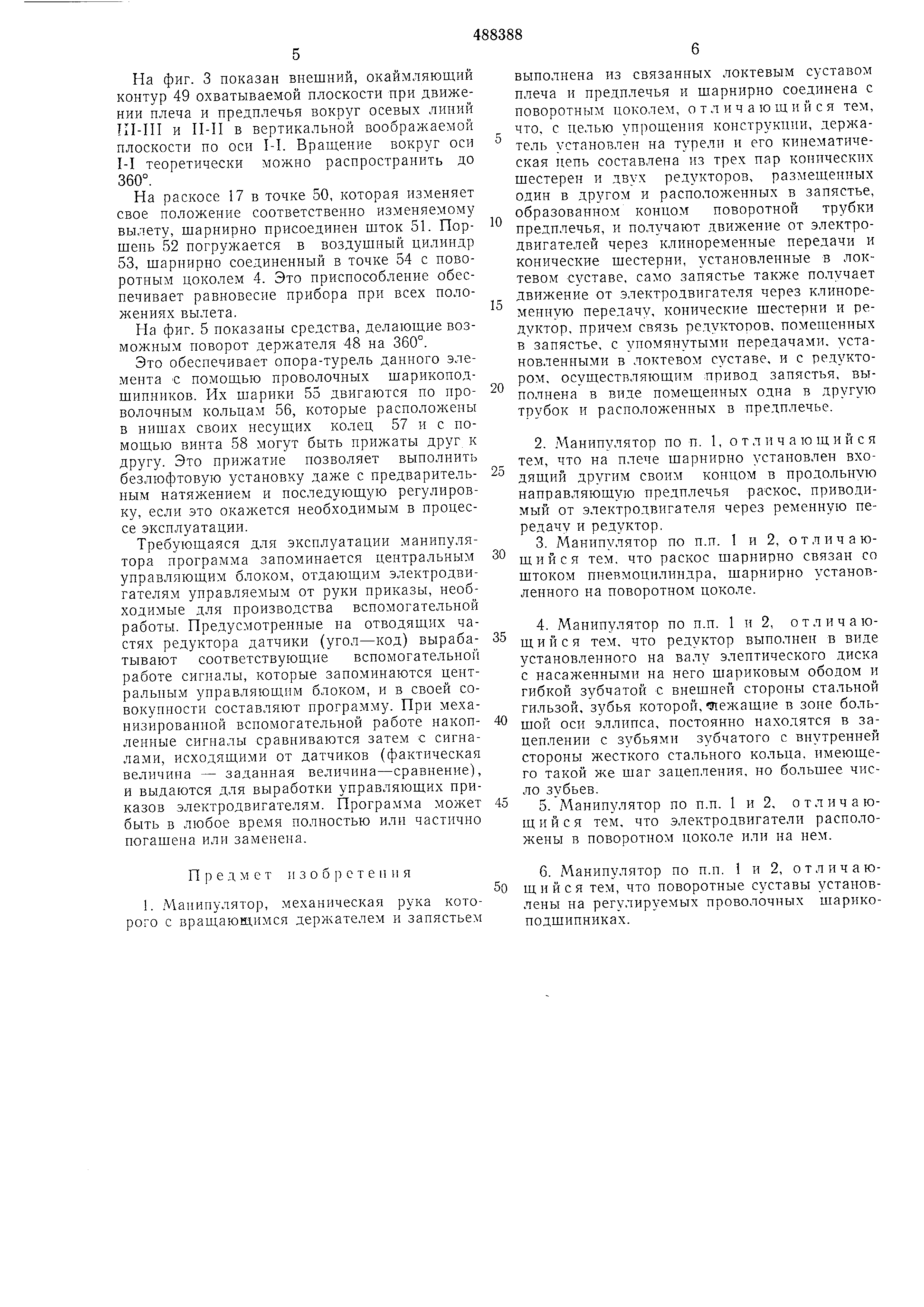
запястья. На фиг. 3 показан внешний, окаймляющий контур 49 охватываемой плоскости при движении плеча и предплечья вокруг осевых линий Ill-Ill и II-II в вертикальной воображаемой плоскости по оси I-I. Вращение вокруг оси I-I теоретически можно распространить до 360°. На раскосе 17 в точке 50, которая изменяет свое положение соответственно изменяемому вылету, щарнирно присоединен щток 51. Поршень 52 погружается в воздушный цилиндр 53, шарнирно соединенный в точке 54 с поворотным цоколем 4. Это приспособление обеспечивает равновесие прибора при всех положениях вылета. На фиг. 5 показаны средства, делающие возможным поворот держателя 48 на 360°. Это обеспечивает опора-турель данного элемента € помощью проволочных шарикоподшипников . Их шарики 55 двигаются по проволочным кольцам 56, которые расположены в нишах своих несущих колец 57 и с помощью винта 58 могут быть прижаты друг к другу. Это прижатие позволяет выполнить безлюфтовую установку даже с предварительным натяжением и последующую регулировку , если это окажется необходимым в процессе эксплуатации. Требующаяся для эксплуатации манипулятора программа запоминается центральным управляющим блоком, отдающим электродвигателям управляемым от руки приказы, необходимые для производства вспомогательной работы. Предусмотренные на отводящих частях редуктора датчики (угол-код) вырабатывают соответствующие вспомогательной работе сигналы, которые запоминаются центральным управляющим блоком, и в своей совокупности составляют программу. При механизированной вспомогательной работе накопленные сигналы сравниваются затем с сигналами , исходящими от датчиков (фактическая величина - заданная величина-сравнение), и выдаются для выработки управляющих приказов электродвигателям. Програ.мма может быть в любое время полностью или частично погащена или заменена. Предмет изобретен и я 1. Манипулятор, механическая рука которого с вращающимся держателем и запястьем выполнена из связанных локтевым суставом плеча и предплечья и щарнирно соединена с новоротным цоколем, отличающийся тем, что, с целью упрощенпя конструкции, держатель установлен на турели и его кинематическая цепь составлена из трех пар конических щестерен и двух редукторов, размещенных один в другом и расположенных в запястье, образованном концом поворотной трубки предплечья, и получают движение от электродвигателей через клиноременные передачи и конические щестерни, установленные в локтевом суставе, само запястье также получает движение от электродвигателя через клиноременную передачу, конические щестерни и редуктор , причем связь редукторов, помещенных в запястье, с упомянутыми передачами, установленными в локтевом суставе, и с редуктором , осуществляющим привод запястья, выполнена в виде помещенных одна в другую трубок и расположенных в предплечье. 2.Л1анипулятор по п. 1, о т л и чающийся тем, что на плече щарнирно установлен входящий другим своим концом в продольную направляющую предплечья раскос, приводимый от электродвигателя через ременную передачу и редуктор. 3.Манипулятор по п.п. 1 и 2, отличающийся тем. что раскос щарнирно связан со штоком пневмоцнлиндра, шарнирно установленного на поворотном цоколе. 4. Манипулятор по п.п. 1 и 2, отличающийся тем, что редуктор выполнен в виде установленного на валу элептического диска с насаженными на него шариковым ободом и гибкой зубчатой с внешней стороны стальной гильзой, зубья которой, лежащие в зоне большой оси эллипса, постоянно находятся в зацеплении с зубьями зубчатого с внутренней стороны жесткого стального кольца, имеющего такой же щаг зацепления, но большее число зубьев. 5. Манипулятор по н.п. 1 и 2, отличающийся тем, что электродвигатели расположены в поворотном цоколе или на нем. 6. Манипулятор по п.п. 1 и 2, отличающийся тем, что поворотные суставы установлены на регулируемых проволочных шарикоподщипниках .
Ж
20
Фиг. 2 9 .
-ж-ж /

Реферат
Формула
Комментарии