Комбинированный манипулятор роботохирургического комплекса - RU2721485C1
Код документа: RU2721485C1
Чертежи






Описание
Область техники, к которой относится изобретение
[1] Изобретение относится к машиностроению, в частности, к робототехнике, а именно, к пространственным манипуляционным механизмам роботов параллельной структуры. Такие механизмы могут быть применены в следующих областях: роботизация, телеоперация, минимальная инвазивная хирургия и другие. Более конкретно, изобретение относится к механизмам манипулятора, входящего в состав роботохирургического комплекса для проведения минимально инвазивных хирургических операций.
Предпосылки создания изобретения
[2] В последнее время робот-ассистированная хирургия приобрела широкое распространение в медицине развитых стран. Роботы-хирурги позволяют добиться высокой точности при хирургическом воздействии на ткани и органы во время операции и обеспечить малую инвазивность. Применение такой техники и технологий формирует текущие тренды развития современной хирургии.
[3] Главным исполнительным механизмом в роботических системах является манипулятор. Манипулятор обеспечивает крепление и прецизионные перемещения хирургического инструмента в оперируемой области. Хирургический инструмент, перемещаемый манипулятором во время операции, реализует/исполняет необходимые хирургические манипуляции на тканях (коагуляция, разрезание, сшивание и так далее).Цена ошибки, неточностей и погрешностей при работе инструмента очень велика. Потребность во все более совершенных манипуляторах для хирургии формирует актуальные научные и технические задачи. Совершенствование манипуляторов обусловлено необходимостью дистанционного управления инструментом хирургом, расположенного удаленно от операционного стола, требованиями повышения точности, надежности и минимальной травмы при воздействии инструмента на операционное поле, а также требованиями минимального воздействия/травмы на ткани, расположенные рядом с операционным полем.
[4] При робот-ассистированных операциях используется «контроллер», который считывает механические движения рук хирурга-оператора и преобразует их в цифровые сигналы, которые, в свою очередь, пересчитываются в системе управления и используются для управления движениями манипулятора и инструмента.
[5] Традиционные манипуляторы хирургического робота используют механику последовательной структуры, основным преимуществом которых является большая площадь охвата выходным звеномманипулятора. Однако размеры таких механизмов велики, а показатели жесткости, точности и КПД ограничены, что накладывает значительные принципиальные ограничения при их применении. Наиболее значимые из них:
a. ограничения по возможной динамической точности и точности повторений при перемещениях манипулятора;
b. значительный размер манипулятора при обеспечении требуемого, сравнительно небольшого, рабочего перемещения выходного звена манипулятора;
c. задействование значительного пространства для обеспечения траекторий перемещения отдельных звеньев манипулятора (система громоздкая и занимает очень много пространства, в том числе и над операционной зоной, что недопустимо, так как во время хирургического вмешательства всегда необходимо обеспечить достаточный подступ к пациенту);
d. незначительная полезная масса, переносимая манипулятором в сравнении с используемой мощностью двигателей манипулятора;
e. незначительная и ограниченная жесткость конструкции манипулятора из-за значительной консольности последовательной структуры;
f. сложная механика для обеспечения требуемых движений (два поворота) в точку «0» (точка вхождения хирургического инструмента в тело пациента);
g. в силу ограничений движений, связанных с архитектурой манипулятора, и взаимного расположения его звеньев, вызванных сложностью модели и точностью расчета положения выходного звена манипулятора, обеспечение удержания инструмента в точке «0» в приемлемом поле допуска не всегда реализуемо.
[6] В силу вышеназванных и иных причин при использовании манипуляторов последовательной структуры возникают ограничения по возможным траекториям движения хирургического инструмента и ограничения по достоверному и точному управлению хирургическим инструментом.
[7] Конструкции манипуляторов с последовательной архитектурой раскрыты, в частности, в US 6659939 B2, US 6102850 A, EP 1984150 B1, US 10293498 B2, WO 2018059039 A1, US 10299883 B2.
[8] В процессе исследований был выявлен и предложен новый подход к механике манипулятора, а именно, использование манипуляторов на параллельных структурах. В отличие от традиционных манипуляторов, структуры с параллельной кинематикой содержат замкнутые кинематические цепи и воспринимают нагрузку как пространственные фермы, то есть, звенья этих механизмов работают на растяжение и сжатие, что обеспечивает жесткость всей конструкции и положительно сказывается на многие характеристики, и, прежде всего, на точность позиционирования исполнительного звена. Использование манипулятора на параллельных структурах в сравнении с существующими манипуляторами последовательной структуры позволяет:
a. обеспечить до десяти раз более высокую точность, что дает возможность манипулировать хирургическим инструментом с точностью, превосходящей размеры любых человеческих органов, и, в специально разработанных случаях, обеспечить точность в микронном диапазоне;
b. повысить жесткость конструкции более чем в пять раз;
c. обеспечить большую полезную нагрузку на исполнительном звене манипулятора по сравнению с аналогичными по мощности конструкциями на последовательной структуре;
d. обеспечить уменьшение размера манипулятора в несколько раз;
e. сократить вес манипулятора в несколько раз.
[9] Конструкции манипуляторов с параллельной структурой раскрыты, в частности, в CN 207630032 U, US 20140088613 A1, US 9554865 B2, US 20120245596 A1.
[10] Также известны решения, которые совмещают структурные принципы последовательной и параллельной кинематики (см., например, EP 2740435 B1, DE 102017111296 B3, US 10299883 B2, CN 108015750 A). Из недостатков такой схемы стоит отметить все типичные проблемы, присущие механизмам последовательной структуры, которые перечислялись выше.
[11] Манипуляторы на основе параллельной кинематики, при всех своих преимуществах, в медицине используются редко, а те, которые используются, имеют ограничения в применении. Такая ситуация объясняется несколькими факторами:
a. значительное ограничение перемещений выходного звена манипулятора, при этом попытка увеличения перемещений выходного звена приводит к значительному (до неприемлемого) увеличению размера манипулятора;
b. ограничения или невозможность обеспечить требуемые движения (два поворота) в точке «0»;
c. ограничения при корректном расположении манипулятора относительно точки «0», при этом корректность определятся положением/отдалением манипулятора относительно точки «0»,определяемым требованиями хирургического вмешательства.
[12] В связи с этим, конструкции на основе параллельной структуры снижают функциональность и эффективность манипуляторов при их использовании в рабочей зоне.
[13] Существующие разработки манипуляторов не позволяют в одной конструкции добиться многозадачности, функциональности и эффективности использования манипулятора, а именно, реализовать в одной конструкции механизм с малыми габаритами, с высокой точностью и жесткостью выходного звена манипулятора, при этом имея достаточную рабочую область. Такая конструкция манипулятора необходима для того, чтобы с высокой динамичностью и точностью реализовать перемещение хирургического инструмента в тело пациента во время хирургической операции при ограничении, что инструмент может иметь только два поворота в расчетной точке вхождения (точке «0»). Таким образом, существует потребность в разработке мехатронного устройства, объединяющего в себе главные преимущества последовательной и параллельной кинематики механизмов, при этом нивелируя имеющиеся недостатки каждого.
[14] Наиболее близким аналогом к заявляемому изобретению является раскрытый в документе RU 172752 U1 портальный манипулятор параллельной структуры (фигура 1).Механизм включает основание, размещенные на нем линейные приводы с вертикальными осями, сопряженные с подвижной платформой, поперечную каретку, сопряженную с подвижной платформой посредством привода поступательного перемещения, продольную каретку, сопряженную с поперечной кареткой также посредством привода поступательного перемещения, выходное звено, сопряженное с приводом вращательного перемещения. Механизм содержит портал, включающий закрепленные на основании вертикальные стойки, связанные продольными и поперечными горизонтальными балками, два линейных двигателя с вертикальными осями, первый из которых сопряжен с подвижной платформой посредством рамы, выполненной с возможностью вертикального перемещения относительно стоек, вращательных кинематических пар, а второй линейный двигатель с вертикальной осью сопряжен с подвижной платформой также посредством рамы, выполненной с возможностью вертикального перемещения по стойкам, и дополнительного звена, связанного с рамой и подвижной платформой вращательными кинематическими парами, при этом выходное звено связано с подвижной платформой кинематической цепью, состоящей из выполненных в виде последовательно вложенных рам поперечной и продольной кареток, имеющих возможность поступательного перемещения относительно перпендикулярных осей, причем привод вращательного перемещения выходного звена размещен на продольной каретке.
[15] К недостаткам вышеописанного манипулятора следует отнести малое соотношение линейных перемещений к габаритам конструкции из-за архитектуры расположения и количества рам в механизме. Также, для обеспечения достаточного угла поворота большей горизонтальной рамы по одной из вращательных осей, существует необходимость увеличения габаритов (высоты) основания манипулятора. Стоит отметить сложность математического описания кинематики перемещения вокруг точки «0» и обеспечения достаточных углов поворота вокруг нее из-за возрастающих габаритов рамных конструкций.
[16] Именно решению перечисленных проблем посвящена данная заявка.
Суть изобретения
[17] Технической задачей, на решение которой направлено настоящее изобретение, является повышение эффективности и функциональности роботохирургического комплекса путем разработки принципиально новой схемы решения сформулированных технических проблем.
[18] Техническим результатом настоящего изобретения является разработка манипулятора, который сочетает в себе малые габариты и вес при достаточной жесткости конструкции и динамической точности позиционирования, при этом обладающего достаточной подвижностью и свободой выходного звена, на котором устанавливается хирургический инструмент.
[19] Поставленные задачи и технические результаты достигаются благодаря разработке двухкомпонентного пространственного механизма. Он представляет собой усовершенствованную конструкцию трипода в сочетании с портальным механизмом его линейных перемещений над рабочей областью. Такая гибридная кинематическая схема позволяет создать манипулятор, обладающий необходимой подвижностью и углом поворота выходного звена, на котором в итоге устанавливается хирургический инструмент.
[20] Более подробно, технический результат изобретения достигается за счет того, что комбинированный манипулятор роботохирургического комплекса включает механизм 100, снабженный приводными элементами 200 и выполненный в виде соединенных между собой посредством трех штанг 130 неподвижной опорной платформы 110 и подвижной платформы 120, подвижная платформа 120 механизма 100 выполнена с возможностью размещения на ней хирургического инструмента 500; и портальный механизм 300, выполненный в виде модуля поперечного перемещения и модуля продольного перемещения, каждый из которых снабжен блоком приводов 400; при этом приводные элементы 200 и блоки приводов 400 выполнены с возможностью передачи и/или получения данных системы управления роботохирургическим комплексом. При этом механизм 100 установлен на модуле поперечного перемещения с возможностью перемещения по нему в поперечном направлении, а модуль поперечного перемещения установлен на модуле продольного перемещения с возможностью перемещения по нему в продольном направлении. Причем каждая штанга 130 механизма 100 одним своим концом 132 через подшипниковый узел 290 соединена с соответствующим приводным элементом 200, закрепленным на неподвижной опорной платформе 110, а другим концом 131 через шарнир Гука 133 - с подвижной платформой 120. Причем каждый из указанных модулей портального механизма 300 выполнен в виде опорной рамы из четырех реек, расположенных попарно перпендикулярно друг другу, и рейки в парах расположены параллельно, при этом одна пара реек снабжена линейными направляющими. Причем на линейных направляющих реек первой пары 310 модуля поперечного перемещения размещены каретки 312 с закрепленной на них неподвижной опорной платформой 110 для поперечного перемещения механизма 100, и на линейных направляющих реек первой пары 330 модуля продольного перемещения размещены по две каретки 332 с закрепленной на каждой из них установочной площадкой 322, которая закреплена на установочной плоскости внутренней поверхности реек 320 из второй пары реек модуля поперечного перемещения, для продольного перемещения модуля поперечного перемещения с механизмом 100.
[21] В некоторых вариантах изобретения блок приводов 400 каждого модуля портального механизма 300 выполнен на основе синхронного сервопривода 410 совместно с прецизионным планетарным редуктором 411.
[22] В некоторых вариантах изобретения манипулятор дополнительно включает приводной элемент 600, размещенный на подвижной платформе 120, для перемещения хирургического инструмента вдоль одной линейной оси.
[23] В некоторых вариантах изобретения в качестве приводного элемента 200 механизма 100 или приводного элемента 600 для перемещения хирургического инструмента использован сервопривод совместно с безлюфтовым прецизионным редуктором волнового типа или с планетарным редуктором с угловым люфтом менее 6'.
[24] В некоторых вариантах изобретения на неподвижной опорной платформе 110 механизма 100 выполнены диаметрально противоположно расположенные крепежные элементы 112 для монтажа кареток 312 модуля поперечного перемещения.
[25] В некоторых вариантах изобретения неподвижная опорная платформа 110 механизма 100 снабжена площадками 111, ориентированными в сторону подвижной платформы 120 механизма 100 и расположенными относительно друг друга под углом в 120°.
[26] В некоторых вариантах изобретения приводной элемент 200 размещен на площадке 111 и выполнен в виде сервопривода 210 с шарико-винтовой передачей.
[27] Предложенная схема разрешает поставленные проблемы и обеспечивает достаточную по объему область (рабочее пространство) работы манипулятора.
[28] Использование предложенной схемы позволит создавать максимально выверенные под хирургическую технологию высокоточные, компактные, жесткие, высокодинамичные и при этом недорогие манипуляторы под каждый (необходимый) вид хирургического вмешательства (абдоминальная хирургия, вертебральная хирургия и др.).
[29] Объекты и преимущества настоящего изобретения станут более очевидны специалистам после рассмотрения следующего подробного описания и чертежей.
Краткое описание чертежей
[30] Прилагаемые чертежи, которые включены в состав настоящего описания и являются его частью, иллюстрируют варианты осуществления изобретения и совместно с вышеприведенным общим описанием изобретения и нижеприведенным подробным описанием вариантов осуществления служат для пояснения принципов настоящего изобретения.
[31] Фигура 1 изображает наиболее близкий аналог к заявляемому изобретению - портальный манипулятор параллельной структуры.
[32] Фигура 2 иллюстрирует кинематическую схему трипода.
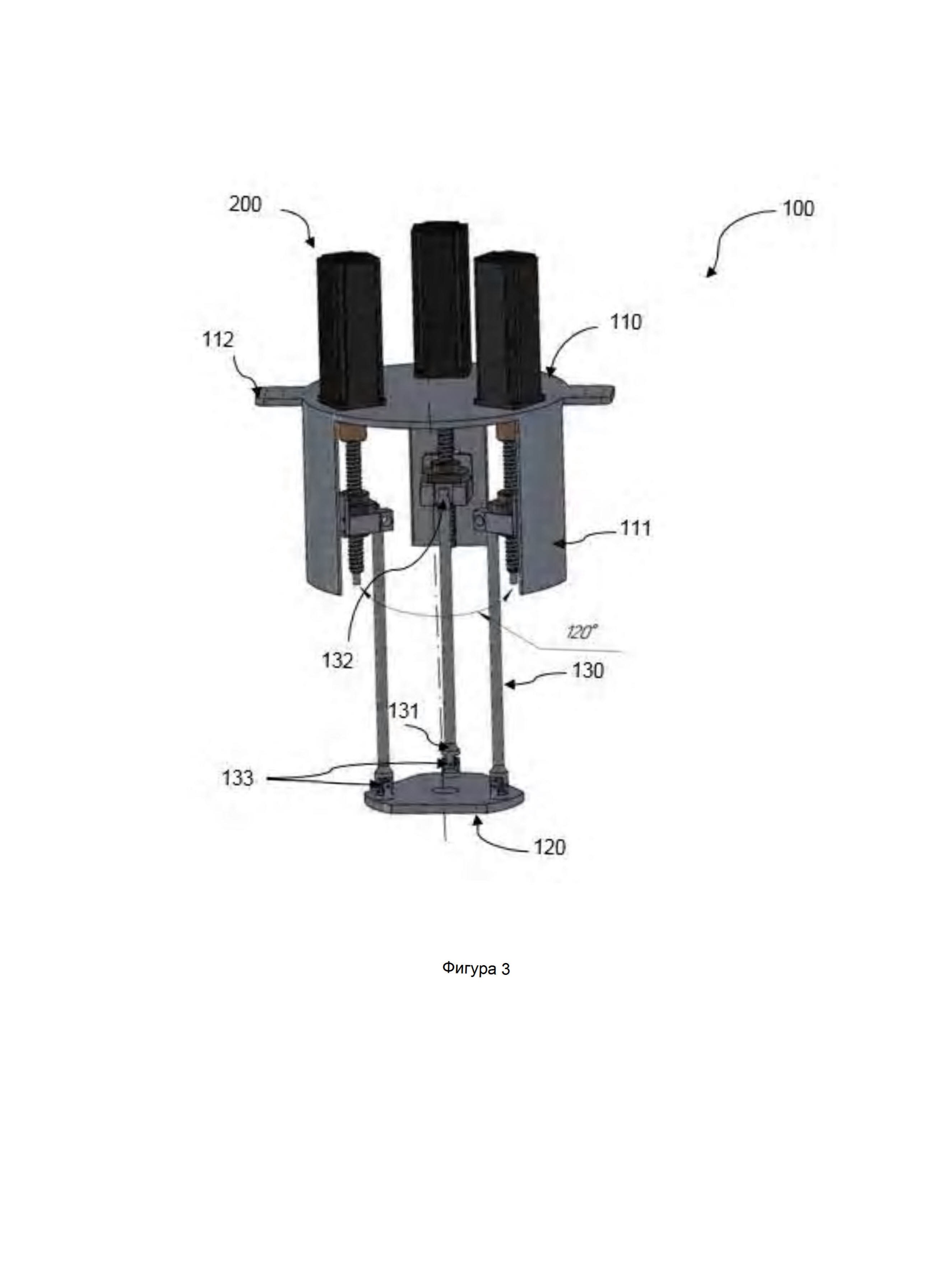
[33] Фигура 3 изображает общий вид модели трипода согласно настоящему изобретению.
[34] Фигура 4 иллюстрирует предпочтительный вариант осуществления приводного элемента трипода.
[35] Фигура 5 иллюстрирует общий вид конструкции манипулятора.
[36] Фигура 6 изображает общий вид модели трипода с установленным на его подвижной платформе хирургическим инструментом.
[37] Фигура 7 иллюстрирует общий вид конструкции манипулятора с установленным на его подвижной платформе хирургическим инструментом.
Термины и определения
[38] Для лучшего понимания настоящего изобретения ниже приведены некоторые термины, использованные в настоящем описании изобретения. Если не определено отдельно, технические и научные термины в данной заявке имеют стандартные значения, общепринятые в научной и технической литературе.
[39] В настоящем описании и в формуле изобретения термины «включает», «включающий» и «включает в себя», «имеющий», «снабженный», «содержащий» и другие их грамматические формы не предназначены для истолкования в исключительном смысле, а, напротив, используются в неисключительном смысле (т.е., в смысле «имеющий в своем составе»). В качестве исчерпывающего перечня следует рассматривать только выражения типа «состоящий из».
[40] В настоящих материалах заявки под терминами «роботизированный технологический комплекс», «роботизированная система», «роботизированный комплекс», «роботохирургический комплекс», «роботохирургическая система» понимают сложные системы или комплексы в хирургии с использованием робота-ассистента во время операции. «Робот-ассистивные системы» или «робот-ассистированные хирургические системы» - это роботизированные системы, предназначенные для проведения медицинских операций. Это не автономные устройства, робот-ассистивными системами при проведении операции управляют хирурги.
[41] В настоящих материалах заявки под термином «мехатронный комплекс» или «мехатронная система» понимают комплекс или систему с компьютерным управлением движения, которые базируются на знаниях в области механики, электроники и микропроцессорной техники, информатики и компьютерного управления движением машин и агрегатов.
[42] В настоящей заявке под термином «оператор» понимают производящего операции врача-хирурга. Признаки «оператор» и «хирург» в настоящем описании изобретения являются синонимами.
[43] В настоящих материалах заявки под термином «манипулятор» понимают мехатронный механизм, предназначенный для закрепления и перемещения (изменения положения) хирургического инструмента во время выполнения хирургической операции в соответствии с заданными командами от системы управления роботохирургического комплекса.
[44] В настоящих материалах заявки под термином «портальный механизм» понимают механизм роботизированной системы, состоящий из двух опорных (портальных) рам, имеющих возможность по команде от системы управления роботохирургического комплекса перемещаться одна относительно другой по осям, расположенным под углом 90° друг относительно друга.
[45] В настоящих материалах заявки под терминами «модуль продольного перемещения» и «модуль поперечного перемещения» понимают механизмы, обеспечивающие взаимно-перпендикулярное движение того или иного элемента относительно друг друга.
[46] Термин «соединенный» означает функционально соединенный, при этом может быть использовано любое количество или комбинация промежуточных элементов между соединяемыми компонентами (включая отсутствие промежуточных элементов).
[47] Кроме того, термины «первый», «второй», «третий» и т.д. используются просто как условные маркеры, не накладывая каких-либо численных или иных ограничений на перечисляемые объекты.
Подробное описание изобретения
[48] Описание примерных вариантов осуществления настоящего изобретения, приведенное ниже, приводится исключительно в качестве примера и предназначено для иллюстративных целей и не предназначено для ограничения объема раскрываемого изобретения.
[49] Информацией для проектирования манипулятора являются исследования, посвященные оптимизации геометрических, кинематических и силовых параметров манипуляторов с механизмами параллельной структуры, и разработка методик их расчета и проектирования, а также задача обоснованного выбора конструктивных параметров манипулятора на этапе проектирования и режимов движений при выполнении различных технологических операций. Разрабатываемый механизм должен обладать высокой точностью и жесткостью выходного звена и при этом иметь рабочую область с достаточной площадью охвата. Возможным решением представляется создание механизма на основе параллельной кинематики, возможности которого расширены/дополнены другим механизмом для обеспечения достаточной рабочей области.
[50] Механизмами параллельной кинематики называются устройства, выходное звено которых присоединяется к основанию несколькими независимыми кинематическими цепями. Они отличаются высокой жесткостью, позволяют добиваться высокой точности перемещений, снижать вибрации, а также оптимально распределять усилия. В качестве параллельного механизма могут быть использованы разные решения.
[51] В предпочтительном варианте осуществления изобретения манипулятор представляет собой мехатронное устройство, в котором используется механизм, являющийся условно параллельным механизмом и схожий по схеме кинематики с механизмом трипода (механизм типа «трипод»), в сочетании с механизмом его линейных перемещений над рабочей областью. Для дальнейшего удобства в описании для обозначения механизма, по кинематике схожего с механизмом трипода, используется термин «трипод». Кинематическая схема такого трипода показана на фигуре 2. Она выполнена на основе пространственного механизма и обеспечивает механизм двумя вращательными степенями свободы (вокруг осей x и y) и одной поступательной степенью свободы (вдоль оси z), что является основным требованием для роботизированной хирургии.
[52] В общем случае предлагаемый согласно настоящему изобретению комбинированный манипулятор включает механизм 100, снабженный приводными элементами 200 (механизм типа «трипод» или трипод согласно принятой выше терминологии) и портальный механизм 300 для обеспечения перемещения механизма 100 вдоль двух линейных осей, снабженный блоками приводов 400. При этом приводные элементы 200 и блоки приводов 400 выполнены с возможностью передачи данных системе управления роботохирургическим комплексом при перемещении элементов или получения управляющих сигналов от системы управления роботохирургическим комплексом для перемещения выходного звена манипулятора в требуемую позицию согласно расчетным данным.
[53] На фигуре 3 изображен общий вид части заявляемого манипулятора (механизма 100) - общий вид трипода 100. Трипод 100 состоит из двух платформ: неподвижной опорной платформы (основания) 110 и подвижной платформы 120, которые соединены между собой посредством трех штанг 130 постоянной длины.
[54] Три штанги 130 соединены одними концами 132 через подшипниковой узел с соответствующими приводными элементами 200, а другими концами 131 штанги 130 соединены через шарниры 133 с подвижной платформой 120. Штанги 130 представляют собой универсальные валы, а шарниры 133 в предпочтительном варианте изобретения являются карданными шарнирами (шарнирами Гука), которые обеспечивают две степени свободы в точке крепления (две вращательные степени свободы).
[55] Неподвижная платформа 110 снабжена площадками 111, ориентированными в сторону подвижной платформы 120. Площадки 111 совместно с неподвижной платформой 110 трипода 100 могут быть выполнены в виде единой цельной детали или могут быть выполнены в виде отдельных элементов, жестко соединенных между собой. Площадки 111 направлены параллельно центральной оси трипода, располагаясь относительно друг друга под углом в 120°.
[56] Механизм 100 типа «трипод» приводится в движение приводными элементами 200, которые размещены на площадке 111. Управляя взаимосвязанно тремя приводными элементами 200 по определенному закону, возможно осуществлять перемещения подвижной платформы 120 трипода манипулятора в пространстве (два поворота и одно линейное перемещение). Подвижная платформа 120 трипода является его конечным звеном, следовательно, является выходным звеном трипода.
[57] В некоторых вариантах осуществления манипулятора приводнойэлемент 200 может быть выполнен в виде любого известного механизма, обеспечивающего сокращение потерь точности из-за люфтов. Например, в качестве приводного элемента 200 может быть использован любой известный сервопривод совместно с безлюфтовым редуктором с нулевым механическим люфтом, например, с безлюфтовым прецизионным редуктором предпочтительно волнового типа или с планетарным редуктором с угловым люфтом менее 6'.
[58] Конкретный вариант исполнения приводного элемента манипулятора 200 согласно настоящему изобретению приведен на фигуре 4. Приводной элемент 200 включает динамичный и точный синхронный сервопривод 210 с шарико-винтовой передачей. В зависимости от шага шарико-винтовой передачи можно увеличить или уменьшить передаточное число приводного элемента.
[59] Передача момента осуществляется следующим образом. Сервопривод 210, закрепленный на неподвижной опорной платформе 110, через соединительную муфту 220 соединяется с валом 230 шарико-винтовой передачи и приводит его во вращательное движение. При этом гайка 240 шарико-винтовой передачи совершает поступательные движения. Гайка 240 крепится в держателе 250 гайки шарико-винтовой передачи, который соединен в нижней своей части с площадкой 260, установленной на подвижной каретке 270 линейного перемещения. Каретка 270 выполнена с возможностью движения по направляющему рельсу 280, закрепленному на внутренней стороне площадки 111, установленной перпендикулярно к неподвижной платформе 110.
[60] На верхней части держателя гайки 250 шарико-винтовой передачи базируется подшипниковый узел 290. К кареткам 270 линейных приводов через вращательный механизм в виде подшипникового узла 290, размещенного на держателе 250 гайки шарико-винтовой передачи, крепятся своими концами 132 штанги 130 (не показано на чертеже).
[61] Таким образом, шарико-винтовая передача обеспечивает поступательные движения штанг 130 трипода 100.
[62] Важным преимуществом вышеописанного механизма типа «трипод» является возможность расположить выходное звено (поворотную, подвижную платформу) как угодно удаленно от приводов, формирующих его движение. Удаленность определяется и регулируется длиной штанг 130. В этом случае обладающие значительной массой привода крепятся на неподвижной опорной платформе. Такая конструкция позволяет значительно сократить динамические нагрузки на выходном звене, располагая его на любом удобном удалении.
[63] Для увеличения зоны охвата выходного звена трипода и для его полноценного позиционирования в пространстве в конструкции манипулятора предлагается использование портального механизма линейных перемещений 300 (фигура 5). Конструкция портального механизма 300 обеспечивает дополнительно два линейных перемещения для трипода 100 в пространстве - продольное и поперечное. Портальный механизм 300 состоит из модуля поперечного перемещения, по которому в поперечном направлении перемещается трипод 100, и модуля продольного перемещения, по которому в продольном направлении перемещается модуль поперечного перемещения. Конструкции модулей расположены в параллельных плоскостях. Каждый из модулей выполнен в виде прямоугольной рамы.
[64] Модуль поперечного перемещения выполнен в виде опорной (портальной) рамы из четырех реек, расположенных попарно перпендикулярно друг другу, при этом рейки в парах расположены параллельно. На рейках 310 первой пары с внешней стороны установлены линейные направляющие 311 модуля поперечного перемещения, по которым синхронно двигаются каретки 312.
[65] На рейках 320 другой пары (второй пары) модуля поперечного перемещения, расположенных перпендикулярно первой паре реек 310, с внутренней стороны располагается установочная плоскость, на которой закреплены установочные площадки 322. На каждой рейке 320 закреплено по две установочные площадки 322, которые в одном из вариантов осуществления изобретения могут располагаться на небольшом расстоянии от углов прямоугольной рамы.
[66] Модуль продольного перемещения также выполнен в виде опорной (портальной) рамы из четырех реек, расположенных попарно перпендикулярно друг другу, при этом рейки в парах расположены параллельно. На рейках 330 первой пары модуля продольного перемещения с внешней стороны установлены линейные направляющие 331 модуля продольного перемещения, по которым синхронно двигаются каретки 332. Первая пара реек 330 модуля продольного перемещения расположена параллельно второй паре реек 320 модуля поперечного перемещения таким образом, что каретки 332 взаимодействуют с соответствующими установочными площадками 322 модуля поперечного перемещения с целью его перемещения вдоль оси х (фигура 5).
[67] Для крепления манипулятора к другим элементам робота у манипулятора предусмотрены специальные крепления манипулятора (не указаны на чертеже). Конструкция крепления манипулятора зависит от конструкции робота в целом. На креплении манипулятора предусмотрены поверхности для соединения с другими элементами робота, и есть ответные поверхности для соединения и крепления непосредственно с манипулятором. Поверхности для крепления с манипулятором соединяются с манипулятором, а именно, со специально предусмотренными поверхностями на одной из рам модуля продольного перемещения портального механизма 300.
[68] Неподвижная платформа 110 трипода закреплена непосредственно на модуле поперечного перемещения без использования каких-либо дополнительных кинематических связей. Указанное соединение осуществляется следующим образом. На неподвижной платформе 110 трипода диаметрально противоположно выполнены «ушки» 112 (крепежный элемент) (фигура 3) для монтажа кареток 312 модуля поперечного перемещения, которые перемещают механизм трипода 100 по линейным направляющим 311 вдоль оси y (фигура 5). В качестве линейных направляющих в предпочтительном варианте изобретения используются прецизионные рельсовые направляющие, которые устанавливаются на каркас портала.
[69] Преимущество вышеописанного исполнения портального механизма 300 для обеспечения линейных движений трипода 100 состоит в создании жесткого рамного каркаса и обеспечении высокой точности перемещений. Компоновка трипода 100 с портальным механизмом 300 обеспечивает большой охват операционного поля выходным звеном трипода, при этом имея более компактные размеры всего манипулятора в целом по сравнению с другими вариантами исполнения комбинированных манипуляторов.
[70] Блок приводов 400 портального механизма может быть выполнен в виде любого известного механизма, обеспечивающего сокращение потерь точности из-за люфтов при работе.
[71] В предпочтительном варианте осуществления манипулятора каждая из осей линейного перемещения портального механизма приводится в движение точным синхронным сервоприводом 410 совместно с ременной передачей. Сервопривод 410 работает в паре с прецизионным планетарным редуктором 411. Он необходим для повышения момента двигателя и большей грузоподъемности конструкции. В качестве редуктора 411 может быть использован любой известный редуктор с нулевым механическим люфтом. В качестве ременной передачи используется полиуретановый зубчатый ремень в паре с зубчатыми шкивами 412. Данные приводные ремни не растягиваются благодаря запрессованному корду, и таким образом не подвержены остаточной деформации. Удлинение, вызываемое периферийными силами и предварительным натяжением, чрезвычайно мало. Такое решение подходит для передач высокой мощности и обеспечения необходимой точности.
[72] В результате получается манипулятор, как сочетание кинематического решения в виде механизма трипода 100 и портального механизма 300 его линейных перемещений (фигура 5). Трипод обладает двумя вращательными и одной поступательной степенью свободы. Поступательное движение (ось z) обеспечивается благодаря синхронной работе трех серводвигателей в одном направлении. Механизм линейных перемещений трипода обеспечивает дополнительные две степени свободы (по осям x, y).
[73] Таким образом, разработанный манипулятор позволяет наиболее точно, при максимально необходимых углах поворота, при минимальном весе и размере конструкции, обеспечить перемещение выходного звена (подвижной платформы трипода) вокруг удаленного центра движения-точки «0».
[74] В одном из вариантов осуществления манипулятора согласно настоящему изобретению на выходное звено хирургического манипулятора устанавливают хирургический инструмент 500 (фигура 6, фигура 7), например, выполненный в виде концевого эффектора 510 с браншами и приводом 550 для управления концевым эффектором хирургического инструмента. Привод 550 закреплен на платформе хирургического инструмента (не показана не чертеже), для передвижения которой по одной линейной оси предусмотрен отдельный приводной элемент 600.
[75] Приводной элемент 600 может быть выполнен в виде любого известного механизма, обеспечивающего сокращение потерь точности из-за люфтов при работе. В предпочтительном варианте осуществления манипулятора платформа хирургического инструмента совместно с хирургическим инструментом приводится в движение линейно точным синхронным сервоприводом 610 совместно с ременной передачей. Он обеспечивает дополнительный ход по оси z хирургическому инструменту 500 в те моменты, когда движение по этой оси благодаря одновременной работе серводвигателей 210 трипода 100 будет недостаточным, нежелательным или невозможным.
[76] Для осуществления описанного выше линейного перемещения хирургического инструмента 500 вдоль оси z к подвижной платформе 120 трипода жестко присоединяют площадку 620 с установленной на ней линейной направляющей 630, по которой с помощью сервопривода 610 перемещается каретка (не показана на чертеже) с закрепленной на ней платформой хирургического инструмента 500.
[77] Такая кинематическая схема позволяет обеспечить ввод инструмента в тело пациента в точке «0» (точка входа хирургического инструмента в тело пациента) и с помощью разработанного математического аппарата системы управления обеспечит движение всего механизма вокруг этой точки.
[78] При возникновении необходимости движения манипулятора хирург перемещает «ручку» управляющего контроллера. Формируется цифровой сигнал и передается в цифровой блок управления, который представляет собой стойку с системой числового программного управления (далее - «система ЧПУ»). Система ЧПУ обеспечивает преобразование координат ручки управляющего контроллера в координаты исполнительного устройства (манипулятора). Она осуществляет формирование сигналов управления приводами по каждой степени подвижности исполнительного устройства таким образом, чтобы то или иное его движение соответствовало направлению, в котором оператор-хирург воздействовал на механизм управляющего контроллера, и оно было для него интуитивно понятно.
[79] Блоки приводов (приводные элементы) манипулятора связаны с системой ЧПУ. Они сопряжены посредством общей шины передачи данных. Система ЧПУ выполнена с возможностью записи данных о получаемых командах. Средства передачи данных выбираются из устройств, предназначенных для реализации процесса коммуникации между различными устройствами посредством проводной и/или беспроводной связи, в частности, такими устройствами могут быть: GSM модем, Wi-Fi приемопередатчик, Bluetooth или BLE модуль, GPRS модуль, NFS, Ethernet и т.п.
[80] Манипулятор обладает гибкими настройками, что позволяет его ориентировать под разные задачи. Использование предложенной схемы позволит создать максимально выверенные под хирургическую технологию высокоточные, компактные, жесткие, высокодинамичные и при этом недорогие манипуляторы под каждый (необходимый) вид хирургического вмешательства.
[81] Примененный подход, основывающийся на объединении конструкции трипода с портальным механизмом его линейных перемещений, теоретически обоснован и подтвержден при помощи моделирования.
[82] Хотя настоящая патентная заявка относится к определенному в прилагаемой ниже в формуле изобретения изобретению, важно отметить, что настоящая заявка на патент содержит основание для формулировки других изобретений, которые могут, например, быть заявлены как объект уточненной формулы изобретения настоящей заявки или как объект формулы изобретения в выделенной и/или продолжающей заявке. Такой объект может быть охарактеризован любым признаком или комбинацией признаков, описанных в настоящем документе.
Реферат
Изобретение относится к медицине, а именно к комбинированным манипуляторам роботохирургического комплекса. Манипулятор включает механизм, снабженный приводными элементами, и портальный механизм. Механизм, снабженный приводными элементами, выполнен в виде соединенных между собой посредством трех штанг неподвижной опорной платформы и подвижной платформы. Подвижная платформа выполнена с возможностью размещения на ней хирургического инструмента. Портальный механизм выполнен в виде модуля поперечного перемещения и модуля продольного перемещения, каждый из которых снабжен блоком приводов. Модуль поперечного перемещения установлен на модуле продольного перемещения с возможностью перемещения по нему в продольном направлении. Каждый из указанных модулей портального механизма выполнен в виде опорной рамы из четырех реек, расположенных попарно перпендикулярно друг другу. Рейки в парах расположены параллельно, при этом одна пара реек снабжена линейными направляющими. На линейных направляющих реек первой пары модуля поперечного перемещения размещены каретки с закрепленной на них неподвижной опорной платформой. На линейных направляющих реек первой пары модуля продольного перемещения размещены по две каретки с закрепленной на каждой из них установочной площадкой, которая закреплена на установочной плоскости внутренней поверхности реек из второй пары реек модуля поперечного перемещения. Достигаются малые габариты и вес манипулятора при достаточной жесткости конструкции, динамической точности позиционирования, достаточной подвижности и свободе выходного звена, на котором устанавливается хирургический инструмент. 6 з.п. ф-лы, 7 ил.
Комментарии