Манипулятор - SU861061A1
Код документа: SU861061A1
Чертежи
Описание
(54) МАНИПУЛЯТОР
Реферат
Формула
1
Изобретение относится к машиностроению .
Известен манипулятор, содержащий исполнительный механизм в виде трехэлементной
системы, каждый элемент кото- 5 рой содержит приводной силовой цилиндр,
при этом элементы одними концами шарнирно соединены с основанием, а противоположными
концами шарнирно соединены между собой.10
Недостатком известного манипулятора
является то, что перемещение исполнительного элемента находится в прямой зависимости
от перемещения штоков цилиндров. Увеличение зоны обслуживания манипуля- 15
тора возможно только при увеличении размеров силовых цилиндров по длине и, в
силу технологических требований при изготовлении , по диаметру. При этом увеличивается
расход рабочей жидкости.20
Таким образом, увеличение зоны обслуживания
и скорости перемещения исполнительного элемента ограничено допустимыми размерами гидроцилиндров.
Целью настоящего изобретения являет- 25 ся повышение производительности манипулятора
и увеличение зоны обслуживания.
Указанная цель достигается за счет того,
что каждый элемент манипулятора выполнен в виде опорного и грузового рычагов, зо
шарнирно соединенных между собой и с силовым цилиндром, при этом опорные рычаги
соединены с основанием, а грузовые - между собой.
В предлагаемой схеме прямая зависимость меладу перемещением щтока цилиндра
и исполнительного элемента заменена прямой пропорциональной зависимостью.
Величина коэффициента пропорциональности зависит от размеров элементов системы
и от места расположения точек соединения силового цилиндра с опорным и грузовым рычагами.
В описываемой конструкции величина зависимости между перемещением щтока цилиндра
и исполнительного элемента определяется положением точек присоединения
цилиндра к рычагам. Чем ближе, например, точка соединения цилиндра с грузовым
рычагом к точке соединения грузового и опорного рычагов, тем в большее число
раз увеличивается перемещение исполнительного элемента по сравнению с перемещением щтока цилиндра.
В сочленении рычагов, образующих двухповодковую группу, установлены датчики
углов поворота, непрерывно измеряющие взаимное угловое перемещение рычагов и
передающие сигналы в систему управления
о положении двухповодковых групп в определенный момент.
Для уравновешивания трехзвенной пространственной системы в нейтральном положении
одно из звеньев соединено с основанием уравновешивающей системы, например , пружинами растяжения.
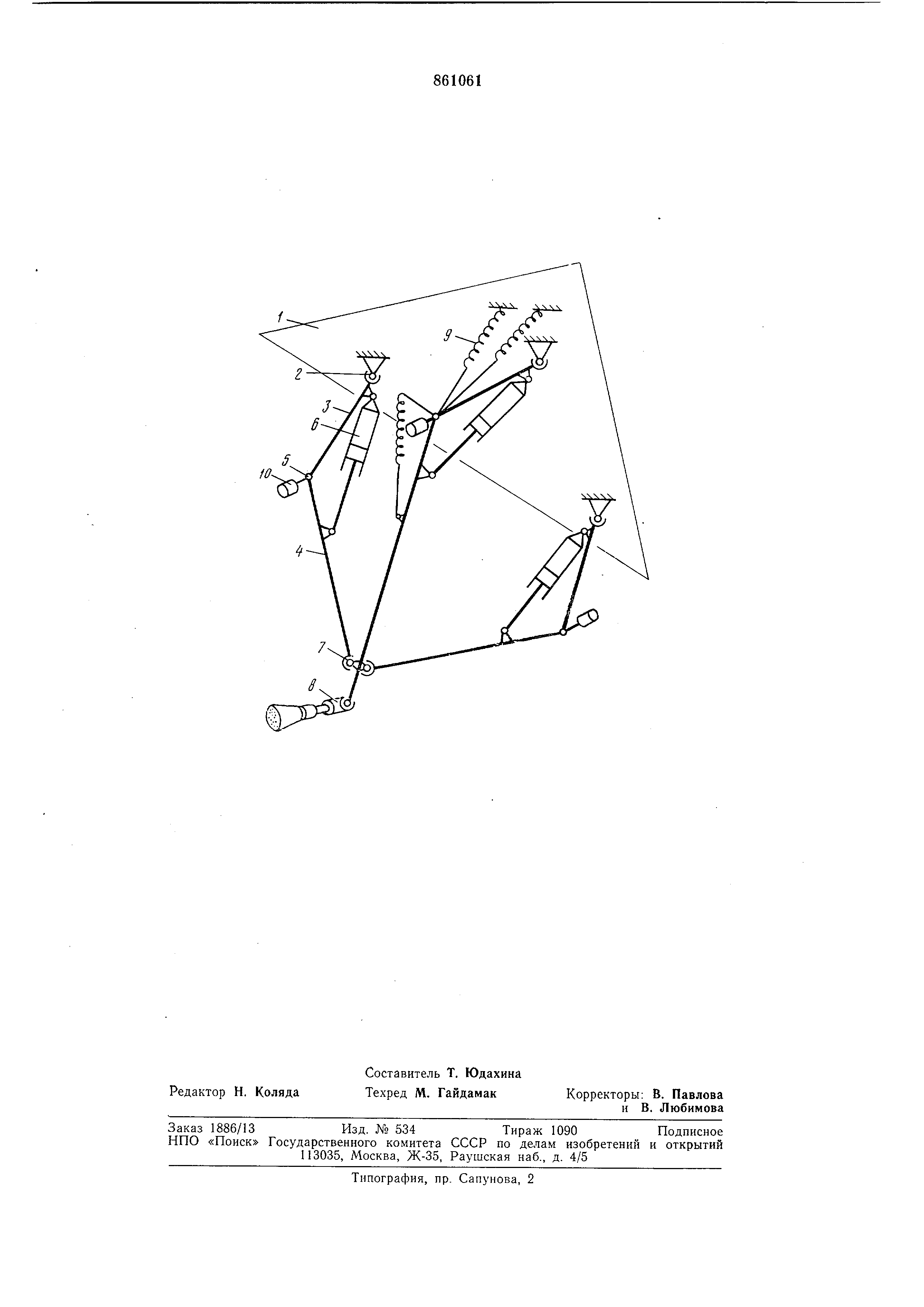
На чертеже представлена кинематическая схема предложенного манипулятора.
Манипулятор содержит основание 1, на котором установлены посредством двухподвижных
шарниров 2 двухповодковые группы первого рода, состоящие из опорных
рычагов 3 и грззовых рычагов 4, соединенных между собой шарнирами 5. Опорные
рычаги 3 и грузовые рычаги 4 в каждом элементе системы соединены между
собой также силовыми цилиндрами 6. Грузовые рычаги 4 соединены между собой
двухподвижными шарнирами 7. Система шарнирно соединена с исполнительным элементом
8. Уравновешивающая система 9 соединяет опорный 3 и грузовой 4 рычаги
среднего элемента системы с основанием 1. В месте соединения рычагов 3 и 4 установлены
датчнки углов поворота 10 для измерения взаимного углового перемещения рычагов 3 и 4.
Манипулятор работает следующим образом .
Сигнал от системы управления подается на распределители, которые от гидростанции
снабжаютрабочей жидкостью силовые цилиндры. Движение штоков силовых нилиндров
6 осуществляет взаимный поворот рычагов 3 и 4 относительно шарниров 5.
Взаимное одновременное движение трех двухповодковых групп, состоящих из опорных
3 и грузовых 4 рычагов, осуществляет перемещение исполнительного элемента 8
в трехмерном пространстве. Перемещения рычагов 3 и 4 непрерывно фиксируются
датчиками 10, установленными в месте соединения (шарниры 5) рычагов 3 и 4, и
передаются в систему управления для корректировки угла поворота каждой двухповодковой группы.
С целью экономии энергии, затрачиваемой на перемещение рычагов манипулятора , система уравновешена в начальном положении при помоши пружин растяжения
9. Начальным считается такое положение элементов манипулятора, когда перпендикуляр
, опущенный из точки пересечения 7 грузовых рычагов 4 на основание 1 пересекает
центр окружности описанной около треугольника с вершинами в точках 2 соединения
опорных рычагов 3 с основаннем 1.
Управление манипулятором может быть
осуществлено позиционным управляющим устройством. Программа задается методом
обучения или аналитически посредством
цифровой памяти.
Применение предлагаемого манипулятора позволит механизировать производственные
процессы, которые ранее выполнялись только вручную (например, окраска железнодорожных
вагонов), выполнять транспортировку тяжелых деталей по сложной
траектории длиной в два-три раза превышающей те, которые обеспечивают выпускаемые
промышленностью манипулятора.
Конструкция манинулятора позволяет
вынолнить его, при необходимости, из двух двухповодковых групп, если зона действия
рабочей машины ограничена плоскостью. При этом все двухподвнжные шарниры заменяются на одноподвижные.
Формула изобретения
Манипулятор, содержащий исполнительный
механизм в виде трехэлементной системы , каждый элемент которой содержит
приводной силовой цилиндр, нри этом элементы одними концами шарнирно соединены
с основанием, а противоположными концами шарнирно соединены между собой
, отличающийся тем, что, с целью повышения производительности и увеличения
зоны обслуживания, в нем каждый элемент снабжен опорным и грузовым рычагами
, шарнирно соединенными между собой и с силовым цилиндром, опорные рычаги
соединены с основанием, а грузовые - между собой.
Комментарии