Высокоскоростной робот параллельной кинематики с четырьмя степенями подвижности - RU2400351C2
Код документа: RU2400351C2
Чертежи




Описание
Область техники, к которой относится изобретение
Изобретение относится к роботу, предназначенному для перемещения платформы, несущей соответствующий инструмент, с четырьмя степенями подвижности (тремя поступательными и одной вращательной вокруг вертикальной оси), с очень высокими ускорениями и скоростями в любом направлении. Более конкретно, к роботу, приводы которого размещены симметрично, обеспечивая однородные рабочие характеристики и высокую жесткость во всем рабочем пространстве робота, основной задачей которого является захват, перенос и установка предметов.
Уровень техники
Роботы параллельной кинематики обычно состоят из неподвижной поддерживающей или опорной плиты, на которой смонтированы приводы, через шарнирно соединенные звенья или кинематические цепи, связанные с подвижной платформой, к которой прикреплен соответствующий инструмент.
Робот этого типа с тремя степенями подвижности описан, например, в патенте US 4976582, а в патенте ЕР 1084802 описан робот параллельной кинематики с четырьмя степенями подвижности (тремя поступательными и одной вращательной).
Роботы параллельной кинематики с четырьмя степенями подвижности очень подходят для выполнения задач манипулирования деталями, упаковки и сборки и у них в отношении простоты, цены и скорости перемещения имеются преимущества перед более сложными роботами параллельной кинематики, например, с 6 степенями подвижности.
Объектом изобретения по ЕР 1084802 является робот параллельной кинематики, в котором все связи подвижной платформы являются связями типа шарнирное соединение, что является благоприятным фактором для достижения высоких скоростей и ускорений. Этот робот содержит четыре кинематические цепи, приводимые в действие посредством четырех приводов, которые одним своим концом прикреплены к опорной плите, а другим концом - к кинематической цепи. В свою очередь, кинематические цепи связаны с подвижной платформой, несущей инструмент. Подвижная платформа состоит из двух частей или стержней, связанных своими концами с четырьмя кинематическими цепями, и третьего стержня, который установлен между первыми двумя посредством двух шарнирных соединений, причем этот стержень несет инструмент.
Подвижная платформа допускает поворот на угол ±45°, который может быть увеличен посредством использования зубчатых венцов.
Специальная конструкция подвижной платформы и использование шарнирных соединений приводят к получению изостатической схемы и ведут к неоднородному расположению кинематических цепей, а следовательно, и приводов. Это конкретное расположение приводов в сочетании с изостатической схемой не позволяет роботу иметь однородные рабочие характеристики и высокую жесткость во всем рабочем пространстве, что является существенным недостатком.
Модифицированная конфигурация робота, описанного в патенте ЕР 1084802, описана, например, в публикации: "I4: A new parallel mechanism for SCARA motions" Proc. of IEEE ICRA: Int. Conf. on Robotics and Automation, Taipei, Taiwan, September 14-19, 2003".
Конфигурация, описанная в этой статье, направлена на компенсацию основного недостатка изобретения по патенту ЕР 1084802 - неоднородности рабочих характеристик и низкой жесткости, которые эта конфигурация имеет во всем рабочем пространстве робота.
Эта новая конфигурация по существу основывается на новой конструкции подвижной платформы, которая должна решить вышеупомянутые проблемы, заменив шарнирные соединения призматическими сочленениями, а зубчатые венцы - зубчатой рейкой. Эти изменения подразумевают, в первую очередь, значительное уменьшение риска столкновения между различными частями подвижной платформы.
В частности, подвижная платформа образована тремя частями: двумя боковыми частями и центральной частью, причем боковые части связаны на своих концах с четырьмя кинематическими цепями через шаровые шарниры, как в роботе по патенту ЕР 1084802, тогда как центральная часть связана с боковыми частями посредством призматического сочленения. Четыре кинематические цепи в свою очередь связаны с неподвижной платформой посредством четырех соответствующих приводов.
В конструкции робота по патенту ЕР 1084802 двигатели вращения могут быть заменены линейными двигателями, а шарнирные соединения - универсальными шарнирами. В конкретном случае новой конфигурации, описанной в вышеупомянутой статье, используются четыре линейных двигателя, расположенных в одной и той же плоскости и ориентированных в одном и том же направлении.
Другая конфигурация описана в другой статье: "A High-Speed Parallel Robot for Scara Motions" Proceeding of the 2004 IEEE International Conference on Robotics & Automotion, New Orleans, LA, USA, April 26-May 1, 2004.
Этот робот образован четырьмя связанными с подвижной платформой кинематическими цепями, приводимыми в действие четырьмя приводами вращательного движения, связанными с неподвижным основанием. Основные различия по сравнению с вышеописанной конфигурацией состоят в использовании приводов вращательного движения и в конструкции подвижной платформы. В частности, подвижная платформа образована из двух частей, связанных между собой посредством призматической направляющей и системы из троса и шкива, превращающей линейное поступательное движение направляющей в требуемое вращение. Эта конструкция подвижной платформы позволяет расположить приводы под углом 90° по отношению друг к другу, что дает симметричную конструкцию и однородные рабочие характеристики во всем рабочем пространстве робота.
Основной недостаток последних двух описанных конструкций состоит в ограничении достижения высоких ускорений и скоростей, являющегося основным требованием для вариантов применения по захвату, переносу и установке предметов. Это ограничение обусловлено использованием призматических направляющих, а более конкретно, циркуляцией шариков в направляющих качения.
Раскрытие изобретения
Задачей настоящего изобретения является устранение недостатков упомянутых роботов.
В частности, задачей изобретения является создание робота, имеющего высокую жесткость, высокую точность, однородные рабочие характеристики во всем рабочем пространстве, хорошие динамические характеристики и очень высокие скорости и ускорения в любом направлении.
Указанная задача решается за счет симметричного расположения приводов робота, использования шарнирных соединений в подвижной платформе и новой ее конструкции.
В частности, подвижная платформа робота, согласно данному изобретению, состоит из четырех частей, связанных между собой посредством поворотного шарнира, причем, по меньшей мере, две из этих частей параллельны друг к другу, образуя шарнирно соединенную подвижную платформу, именуемую плоским параллелограммом, имеющую одну степень подвижности в вышеупомянутой плоскости.
Рабочий инструмент объединен с любой из четырех частей, составляющих подвижную платформу.
Кинематические цепи образованы пространственным параллелограммом, состоящим из четырех попарно параллельных стержней, связанных посредством шаровых шарниров.
Эти кинематические цепи одним из своих концов связаны с одним из шарнирных соединений подвижной платформы, а другим концом через поворотный шарнир или через сочленение, обеспечивающее поступательное перемещение, связаны с соответствующими приводами, установленными на опорной плите, находящейся в верхней части робота.
Предпочтительно, чтобы приводы были симметрично расположены в неподвижной структуре, так что это симметричное расположение приводов и, особенно, использование плоского параллелограмма в подвижной платформе позволяет получить отличные динамические характеристики, высокую жесткость и однородные рабочие характеристики во всем рабочем пространстве робота.
Смещение подвижной платформы с четырьмя степенями подвижности (тремя поступательными и одной вращательной относительно вертикальной оси) осуществляется посредством управления приводами.
Степень подвижности, связанная с плоским параллелограммом, представляет собой поворот относительно вертикальной оси, обеспечивающий рабочему инструменту поворот между углами -45° и +45°.
Предпочтительно некоторые или все кинематические цепи робота образованы посредством единственного стержня с двумя карданными или универсальными шарнирами на его концах, связанного с подвижной платформой и с приводами.
Элементы, образующие подвижную платформу, предпочтительно расположены попарно параллельно, а промежуточный элемент расположен параллельно одной из пар звеньев, составляющих подвижную платформу, и связан с другими двумя элементами в их центральной части.
Предпочтительно элементы, образующие подвижную платформу, расположены так, что один из промежуточных элементов смонтирован параллельно одной из пар звеньев, образующих подвижную платформу, и связан с другими двумя элементами в их центральной части, а второй промежуточный элемент смонтирован параллельно второй паре звеньев подвижной платформы и связан с другими двумя элементами в их центральной части, причем два промежуточных элемента связаны между собой в точке, где установлен рабочий инструмент.
Для увеличения диапазона поворота рабочего инструмента в состав устройства может быть включен дополнительный механизм, включающий ремень и шкивы или зубчатые колеса. В этом случае рабочий инструмент будет объединен с любой из необходимых дополнительных механических частей.
Краткое описание чертежей
Для лучшего понимания изобретения его описание в качестве неотъемлемой части содержит набор чертежей, которые носят иллюстративный и неограничивающий характер.
На фиг.1 показан робот в соответствии с настоящим изобретением, вид в перспективе;
на фиг.2 показан узел подвижной платформы и ее соединения с кинематическими цепями робота, вид сверху;
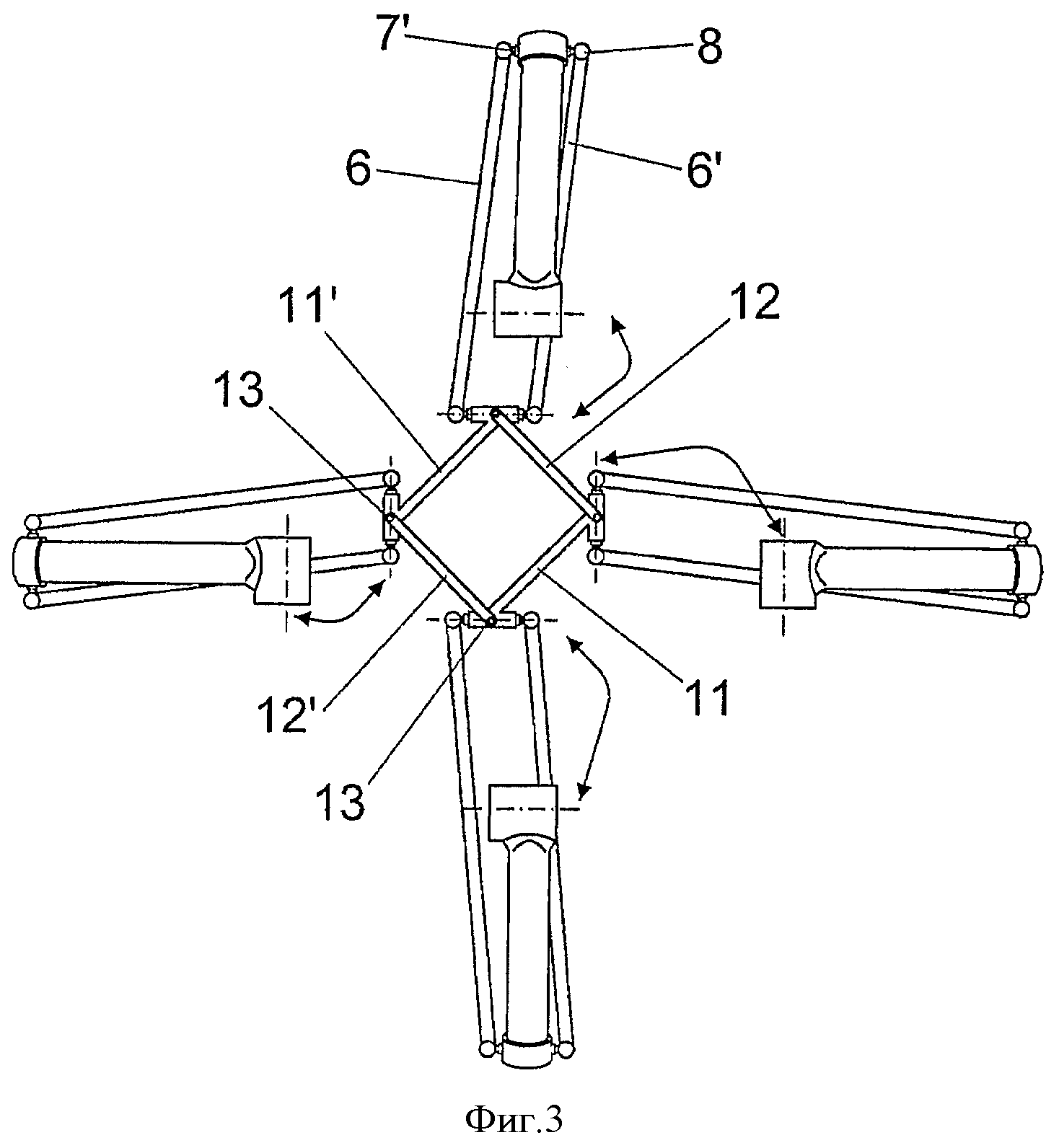
на фиг.3 показан робот в соответствии с настоящим изобретением, вид сверху;
на фиг.4 показана подвижная платформа в варианте осуществления изобретения, предпочтительном с точки зрения расположения приводов, вид сверху;
на фиг.5 изображен вид в перспективе подвижной платформы, включающей в себя усиливающий механизм, состоящий из двух шкивов и ремня;
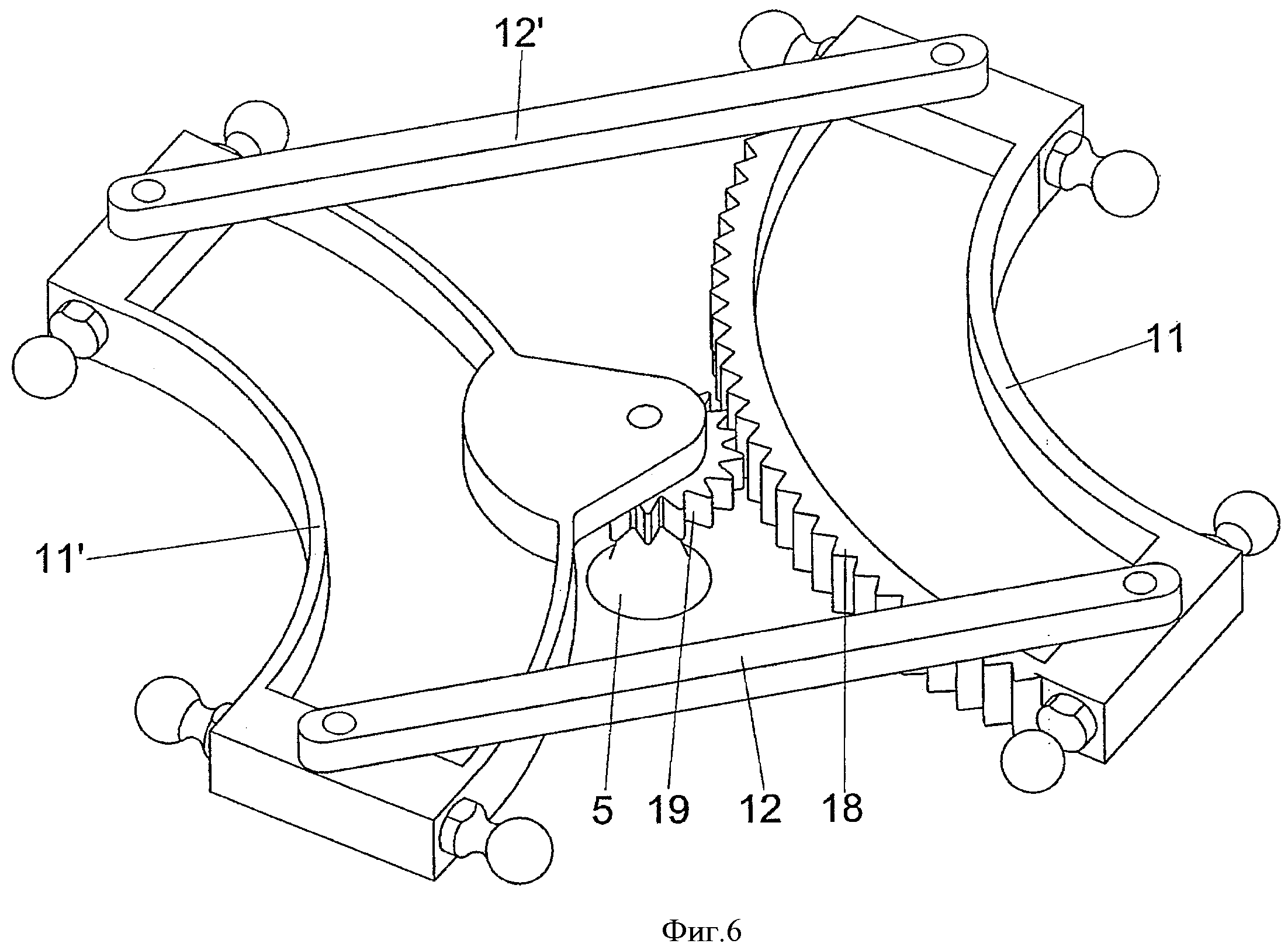
на фиг.6 изображен вид в перспективе подвижной платформы, включающей в себя усиливающий механизм, состоящий из секции с зубцами и зубчатого колеса;
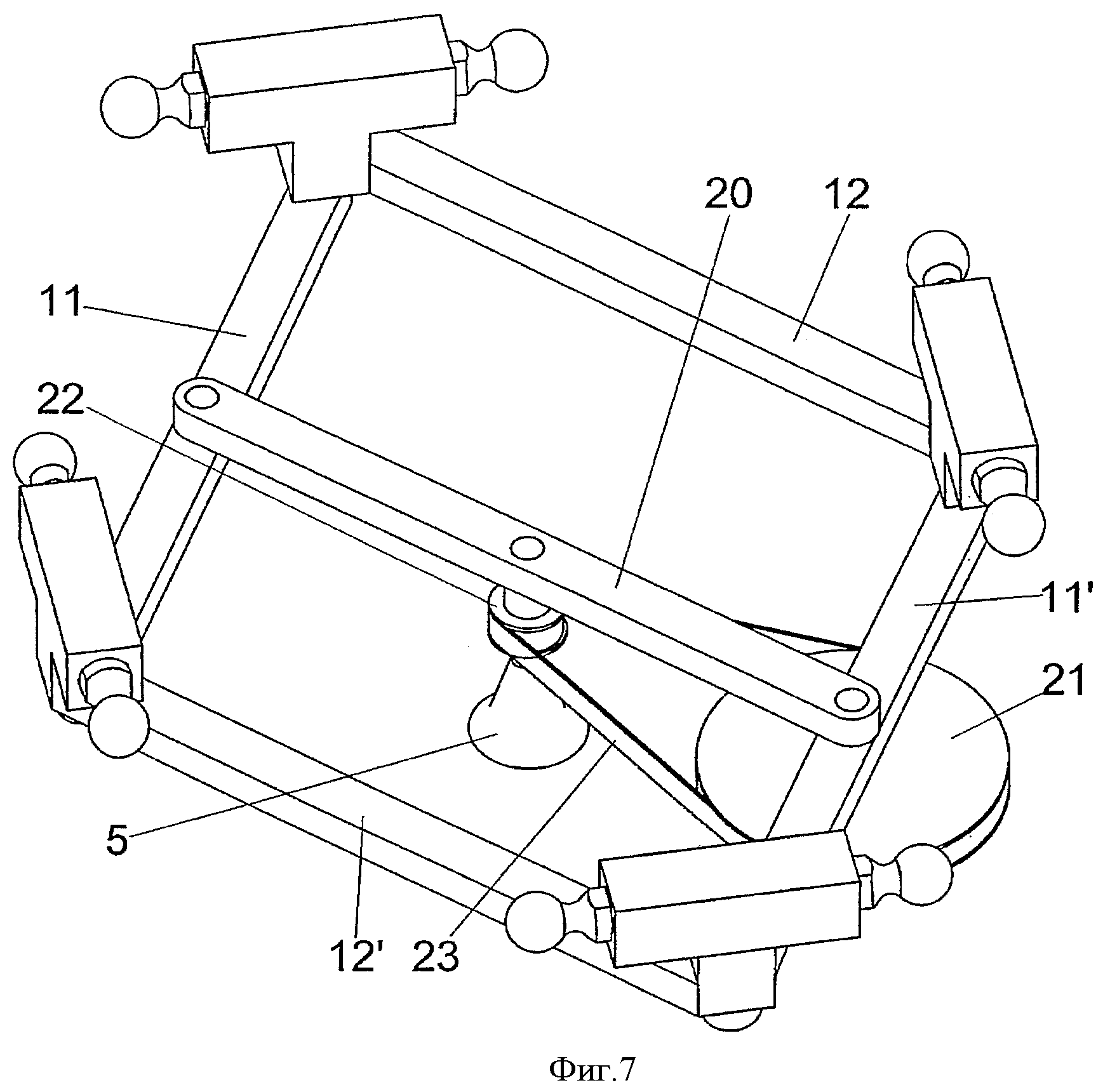
на фиг.7 изображен вид в перспективе подвижной платформы, включающей в себя промежуточный элемент и усиливающий механизм, состоящий из двух шкивов и ремня;
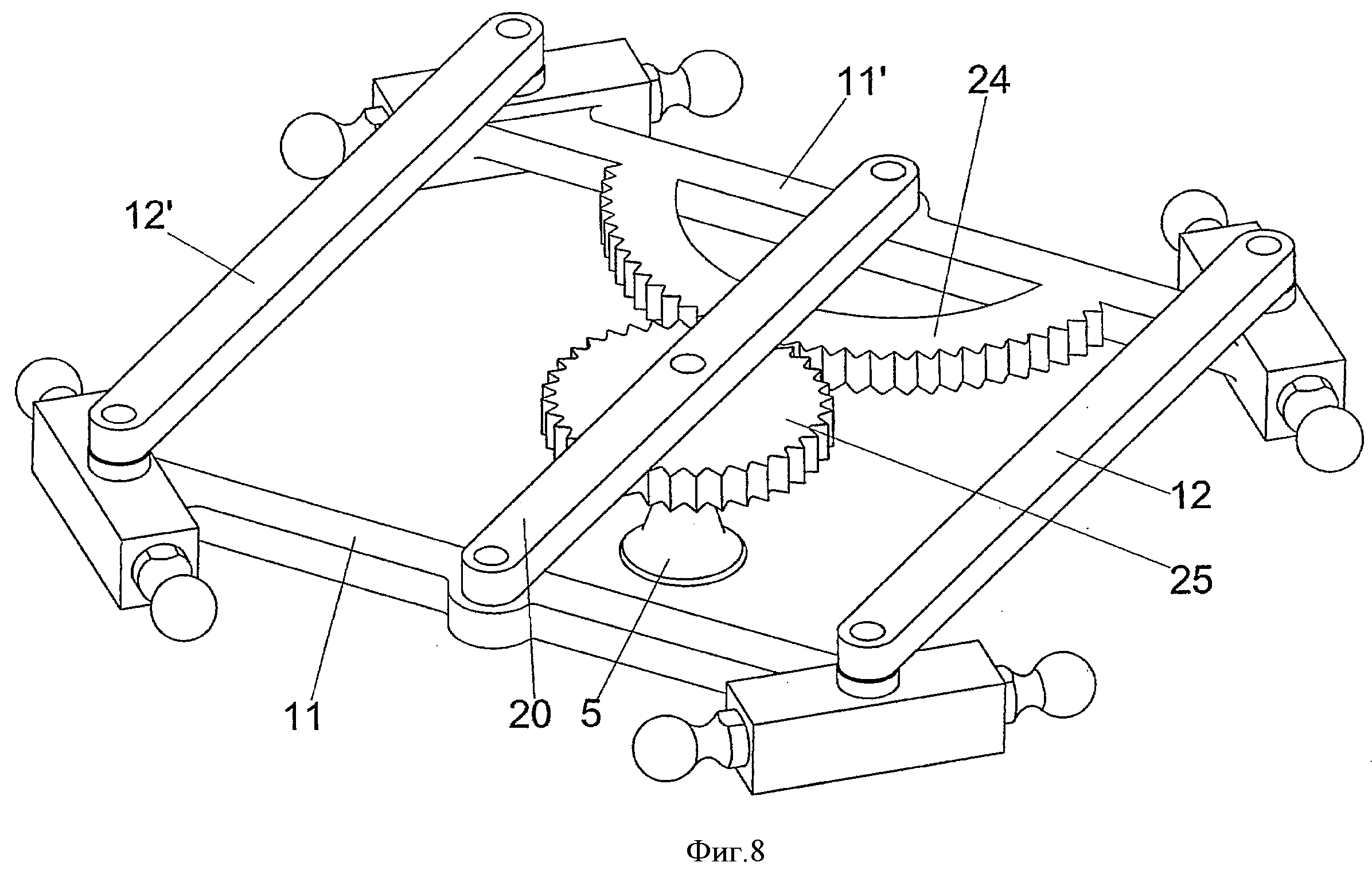
на фиг.8 изображен вид в перспективе подвижной платформы, включающей в себя промежуточный элемент и усиливающий механизм, состоящий из секции с зубцами и зубчатого колеса;
на фиг.9 изображен вид в перспективе подвижной платформы, включающей в себя два промежуточных элемента и усиливающий механизм, состоящий из зубчатой передачи.
Осуществление изобретения
Как показано на фиг.1, робот содержит четыре кинематические цепи (1), одним из своих концов связанные посредством поворотных шарниров (2) с приводами, прикрепленными к опорной плите (3), а другими своими концами - с подвижной платформой (4), на которой установлен рабочий инструмент (5).
Каждая из кинематических цепей состоит из четырех попарно параллельных стержней (6), (6'), (7), (7'), связанных между собой посредством шаровых шарниров (8). В альтернативном варианте осуществления изобретения кинематические цепи образованы посредством единственного стержня с двумя карданными или универсальными шарнирами на своих концах.
Каждый из четырех приводов состоит из крепежной опоры (9) для прикрепления его к опорной плите (3), двигателя (10) вращения, связанного с опорой (9), и звена, жестко связанного с валом двигателя, вызывающего поворот шарнира (2). В альтернативном варианте осуществления изобретения используются четыре линейных двигателя, расположенных в одной плоскости и выставленных в одном и том же направлении.
Подвижная платформа (4) состоит из четырех элементов (11), (11'), (12), (12'), связанных между собой посредством шарниров (13), причем, по меньшей мере, два из этих элементов, образующих подвижную платформу (4), параллельны друг другу, образуя шарнирно соединенную подвижную платформу с одной степенью подвижности в плоскости подвижной платформы, а более конкретно, одного поворота относительно оси, перпендикулярной плоскости упомянутой подвижной платформы (4). Этот поворот обеспечивает рабочему инструменту один поворот на угол между -45° и +45°, который может быть увеличен посредством дополнительных усиливающих механизмов. Эти механизмы будут описаны ниже.
Инструмент (5) объединен с каким-либо из элементов (11), (11'), (12), (12').
Два элемента (11) и (11') образованы звеньями, имеющими на своих концах поперечные надставки (14), снабженные внутренним отверстием, в котором размещены и могут поворачиваться стержни (7') кинематических цепей (1), тогда как звенья (12) и (12') образованы стержнями, шарнирно связанными с поперечными надставками (14) стержней (11) и (11').
Как показано на фиг.3, стержни (7') кинематических цепей (1) имеют ту же самую пространственную ориентацию, что и выходные валы приводов (10), расположенных на опорной плите (3) симметрично, что позволяет получить высокую жесткость, высокую точность позиционирования и однородные рабочие характеристики во всем рабочем пространстве робота.
Предпочтительно расположение приводов, а следовательно, стержней (7') кинематических цепей и надставок (14) подвижной платформы (4) под углами 45°, 135°, 225° и 315°, как показано на фиг.4, хотя имеется неограниченное количество возможностей для расположения приводов.
Подвижная платформа может включать в себя усиливающий механизм, чтобы увеличить диапазон поворота инструмента. Сборка этих механизмов на подвижной платформе во многих случаях требует дополнительных частей.
Различные варианты реализации усиливающих механизмов описаны ниже в том виде, в котором они показаны на фиг.5-9.
В первом варианте реализации, показанном на фиг.5, подвижная платформа (4) состоит из четырех элементов (11), (11'), (12), (12'), связанных посредством шарниров (13). По меньшей мере, два из четырех элементов параллельны друг другу. Усиливающий механизм состоит из двух шкивов, одного (15), смонтированного на элементе (11'), и другого шкива (16), смонтированного на элементе (11), и ремня (17), расположенного между обоими шкивами (15), (16). В этом варианте реализации рабочий инструмент связан с валом шкива (16).
Во втором варианте реализации, показанном на фиг.6, элемент (11) имеет секцию (18) с зубчатым венцом, а элемент (11') имеет зубчатое колесо (19), входящее в зацепление с сектором (18). В этом случае рабочий инструмент (5) связан с зубчатым венцом и также имеет четыре степени подвижности.
На фиг.7 и 8 показаны альтернативные варианты реализации, в которых подвижная платформа (4) включает в себя дополнительный элемент или звено (20).
В варианте реализации согласно фиг.7 подвижная платформа (4) образована пятью элементами (11), (11'), (12), (12') и (20), связанными между собой посредством шарниров. Четыре элемента (11) и (11'), (12) и (12') являются попарно параллельными и концами связаны между собой. Пятый элемент (20) установлен параллельно одной из пар элементов (12), (12') и его концы связаны с двумя другими элементами (11) и (11').
Увеличение поворота рабочего элемента обеспечивается посредством двух шкивов (21), (22), один из которых расположен на одном из элементов (11), (11'), а другой - на дополнительном элементе (20), и соответствующего ремня (23). Рабочий инструмент (5) расположен на шкиве (22).
Как показано на фиг.8, подвижная платформа (4) состоит из тех же пяти элементов (11), (11'), (12), (12') и (20), что и в варианте реализации, показанном на фиг.7, при этом увеличение поворота рабочего элемента обеспечивается посредством сектора (24) с зубчатым венцом, расположенного на одном из элементов (11), (11'), и зубчатого колеса (25), смонтированного на дополнительном элементе (20). При этом рабочий инструмент (5) закреплен на зубчатом венце (25).
Изображенная на фиг.9 подвижная платформа (4) выполнена из шести частей (11), (11'), (12), (12'), (20) и (26), связанных между собой посредством шарниров. Подвижная платформа (4) состоит из тех же самых элементов, которые показаны на фиг.7 и 8, но содержит шестой элемент (26), который установлен параллельно паре элементов (11), (11'). Элемент (20) установлен параллельно паре элементов (12), (12'). Два дополнительных элемента (20) и (26) связаны в средней точке, в которой установлен рабочий инструмент (5). Увеличение поворота инструмента обеспечивается за счет использования зубчатой передачи (28) и расположения ее на пересечении двух дополнительных частей (20) и (26).
Реферат
Изобретение относится к высокоскоростному роботу параллельной кинематики с четырьмя степенями подвижности. Робот содержит четыре кинематические цепи (1), связанные одними своими концами с подвижной платформой (4), несущей инструмент (5), а другими концами - через шарнир (2) с соответствующими приводами, закрепленными на опорной плите (3). Подвижная платформа (4) состоит из четырех элементов (11), (11'), (12), (12'), связанных между собой посредством шарнирных соединений (13). Причем приводы расположены на опорной плите (3) симметрично, предпочтительно под углами 45°, 135°, 225° и 315°. Изобретение направлено на создание робота, имеющего высокую жесткость, высокую точность, однородные рабочие характеристики во всем рабочем пространстве, хорошие динамические характеристики и очень высокие скорости и ускорения в любом направлении. 18 з.п. ф-лы, 9 ил.
Комментарии