Система операционного стола - RU2660001C2
Код документа: RU2660001C2
Чертежи


Описание
Изобретение относится к системе операционного стола с транспортировочным устройством для транспортировки опорной поверхности для пациента, механически связываемой с опорной поверхностью для пациента колонной стола, которая имеет механизм переноса, который может управляться в зависимости от команды переноса для передачи опорной поверхности для пациента между транспортировочным устройством и колонной стола, и блоком управления, приводимым в действие для генерации команды переноса.
Обычные системы операционного стола часто включают в себя колонну стола и механически связываемую с колонной стола панель стола для размещения пациента, далее упоминаемую как опорная поверхность для пациента. Это позволяет снимать опорную поверхность для пациента с колонны стола, например, чтобы подготовить пациента вне операционной к операции или после операции быстрее переместить его из операционной. Сборка и разделение опорной поверхности для пациента и колонны стола в дальнейшем упоминается как перенос опорной поверхности. При этом проводится различие между предоперационным переносом опорной поверхности и послеоперационным переносом опорной поверхности.
При предоперационном переносе опорной поверхности пациент, лежащий на опорной поверхности для пациента, с помощью транспортировочного устройства перемещается в операционную. Расположенная в операционной колонна стола находится при этом в убранном состоянии, так что опорная поверхность для пациента с помощью транспортировочного устройства может быть размещена на колонне стола. Если транспортировочное устройство (и, тем самым, опорная поверхность для пациента) и колонна стола находятся в предопределенном расположении переноса по отношению друг к другу, то колонна стола может перемещаться вверх с помощью механизма переноса, содержащегося в ней. При перемещении вверх колонна стола контактирует с опорной поверхностью для пациента снизу и поднимает ее из транспортировочного устройства. Затем транспортировочное устройство может быть удалено. Колонна стола и жестко зафиксированная в ней опорная поверхность для пациента могут затем позиционироваться надлежащим образом в соответствии с требованиями подлежащей выполнению операции посредством электрических приводов.
При послеоперационном переносе опорной поверхности, транспортировочное устройство перемещается под опорную поверхность для пациента. Если транспортировочное устройство и колонна стола находятся в предопределенном расположении переноса по отношению друг к другу, то колонна стола перемещается вниз. При перемещении вниз колонна стола и опорная поверхность для пациента отсоединяются друг от друга, в то время как опорная поверхность для пациента снимается с транспортировочного устройства. Затем опорную поверхность для пациента можно перемещать вместе с пациентом с помощью транспортировочного устройства из операционной.
Содержащийся в колонне стола механизм переноса, с помощью которого колонна стола передвигается для переноса опорной поверхности, может управляться с помощью блока управления. Если пользователь приводит в действие блок управления, то последний генерирует команду переноса, соответствующую выбранной функции, с помощью которой управляется механизм переноса, содержащийся в колонне стола, чтобы выполнить передачу опорной поверхности для пациента между транспортировочным устройством и колонной стола желательным образом.
При активации пред- или постоперационного переноса опорной поверхности должно быть гарантировано, что выбранная пользователем через блок управления команда переноса посылается на надлежащую колонну стола. Другие колонны столов, расположенные в ближайших окрестностях от этой надлежащей колонны, не могут реагировать на выбранную команду переноса.
Для корректной передачи команд переноса на желательную колонну стола в предшествующем уровне техники существуют различные решения. Так, например, можно встроить приводимый в действие пользователем блок управления непосредственно в колонну стола, например, в виде панели управления, посредством которой могут выбираться основные функции колонны. Тем самым путаница между различными колоннами столов исключается. Тем не менее, это решение очень неудобно для пользователя, так как колонна стола и, тем самым, встроенная в колонну стола панель управления плохо доступна, особенно во время переноса опорной поверхности.
Другим известным решением является применение проводного блока управления. Так как в этом случае блок управления соединен через кабель с колонной стола, неизбежно получается постоянное установление связи блока управления и колонны стола. Однако провод часто воспринимается как создающий помехи. Кроме того, блок управления должен быть всегда под рукой.
Дальнейшим обычным решением является использование в качестве блока управления ручного прибора, оснащенного инфракрасным передатчиком, который работает с расположенным на колонне стола инфракрасным приемником. Команды переноса в этом решении можно передавать на колонну стола только тогда, когда между инфракрасным передатчиком, предусмотренным в ручном приборе, и инфракрасным приемником, расположенным в колонне стола, существует соединение прямой видимости. Чтобы избежать реагирования неправильной колонны стола, обычно происходит постоянное формирование пары из инфракрасного передатчика и инфракрасного приемника за счет того, что передатчик и приемник устанавливаются на один и тот же адрес. Таким образом, создается кодирование, которое гарантирует, что, с помощью ручного прибора будет реагировать только та колонна стола, которая имеет вышеуказанный адрес. Проблемой в этом решении является то, при определенных обстоятельствах применяется неправильный ручной прибор. Чтобы исключить это, как правило, ручной прибор остается у соотнесенной с ним колонны стола в операционной.
Наконец, из уровня техники известен блок управления в форме ножного переключателя, который установлен на транспортировочном устройстве. Если транспортировочное устройство и колонна стола находятся в корректном расположении переноса по отношению друг к другу, то ножной переключатель через рычажный механизм механически связан с переключателем, расположенным на колонне стола. Таким образом, нагружение давлением ножного переключателя через рычажный механизм передается на переключатель на колонне стола. Правильное установление связи между блоком управления и колонной стола гарантируется, таким образом, в любом случае. Одновременно управление ножным переключателем для пользователя является сравнительно удобным. Однако это решение является сравнительно затратным, в частности, ввиду того, что связь между ножным переключателем и расположенным на колонне стола переключателем осуществляется через механический рычажный механизм.
Задачей изобретения является усовершенствование системы операционного стола вышеописанного типа таким образом, что становится возможной удобная для пользователя и к тому же безопасная передача команды переноса на колонну стола.
Изобретение решает эту задачу тем, что блок управления имеет по меньшей мере один расположенный на транспортировочном устройстве элемент управления и расположенный на транспортировочном устройстве, связанный с элементом управления инфракрасный передатчик, который при приведении в действие элемента управления передает команду переноса в форме инфракрасного сигнала, и что на колонне стола расположен инфракрасный приемник, который принимает команду переноса.
Таким образом, изобретение предусматривает, что как элемент управления, который приводит в действие пользователь для генерации команды переноса, так и инфракрасный передатчик, который передает команду переноса на колонну стола, предусматриваются на транспортировочном устройстве. При этом элемент управления и инфракрасный передатчик могут быть установлены на транспортировочном устройстве таким образом, как это наилучшим образом подходит для их соответствующей функции. Таким образом, позиционирование инфракрасного передатчика может быть оптимизировано в отношении нужного соединения прямой видимости с колонной стола. Например, инфракрасный датчик на транспортировочном устройстве устанавливается таким образом, что команды переноса могут передаваться со сравнительно малой мощностью к колонне стола. В противоположность этому, позиция элемента управления может свободно выбираться независимо от положения инфракрасного датчика. В частности, элемент управления может быть помещен в эргономически особенно выгодном для пользователя месте транспортировочного устройства. Это значительно облегчает обращение с блоком управления.
Так как изобретение предусматривает передачу команды переноса в форме инфракрасного сигнала, можно уже за счет нужного соединения прямой видимости, которое определяется относительным расположением инфракрасного передатчика и инфракрасного приемника, в значительной степени избегать непреднамеренного реагирования не надлежащих колонн столов. Это преимущество может быть усилено за счет того, что расположенный на транспортировочном устройстве инфракрасный передатчик передает инфракрасный сигнал с такой низкой мощностью, что инфракрасный сигнал практически только тогда принимается с оцениваемой мощностью расположенным на колонне стола инфракрасным приемником, когда транспортировочное устройство и колонна стола находятся по отношению друг к другу в предопределенном расположении переноса, в котором происходит передача опорной поверхности для пациента.
Предпочтительным образом, блок управления имеет по меньшей мере один ножной переключатель или ножной манипулятор в качестве элемента управления. Применение ножного переключателя или ножного манипулятора является эргономически особенно благоприятным, так как у пользователя обе руки свободны. Таким образом, можно во время переноса опорной поверхности оказывать помощь пациенту, например, выполнять ручную искусственную вентиляцию легких пациента.
В возможной форме выполнения по меньшей мере один элемент управления содержит два монофункциональных элемента, с которыми соотнесена, соответственно, одна единственная функция переноса, причем функция переноса одного элемента является обратной функции переноса другого элемента. Например, один из двух указанных элементов имеет функцию перемещения колонны стола вверх, в то время как другой элемент имеет функцию перемещения колонны стола вниз.
В качестве альтернативы, по меньшей мере один элемент управления содержит бифункциональный элемент, с которым соотнесены две взаимно обратные функции переноса.
В особенно предпочтительном варианте осуществления инфракрасный передатчик излучает инфракрасный сигнал в пространственный угол, который, по существу, ограничен диапазоном передвижения, в котором перемещается расположенный на колонне стола инфракрасный приемник, если колонна стола в предопределенном расположении переноса, в котором колонна стола и транспортировочное устройство находятся по отношению друг к другу для передачи опорной поверхности для пациента, передвигается по отношению к транспортировочному устройству. Тем самым, с одной стороны, гарантируется, что во всем диапазоне передвижения колонны стола существует соединение прямой видимости между инфракрасным передатчиком и инфракрасным приемником. С другой стороны, за счет ограничения пространственного угла, в котором инфракрасный передатчик излучает инфракрасный сигнал, надежно предотвращается неумышленное срабатывание другой колонны стола.
Для получения парного рабочего состояния между расположенным на транспортировочном устройстве инфракрасным передатчиком и расположенным на колонне стола инфракрасным приемником, предпочтительно колонна стола имеет инфракрасный передатчик формирования пары для передачи адреса колонны, в то время как транспортировочное устройство имеет инфракрасный приемник формирования пары для приема адреса колонны. Под вышеуказанным парным рабочим состоянием понимается состояние, в котором инфракрасный передатчик блока управления таким образом устанавливается на единственную колонну стола, что только эта колонна стола может управляемо реагировать на блок управления. В отличие от обычных инфракрасных систем дистанционного управления, в которых задается либо постоянное формирование пары между блоком управления и одной единственной колонной стола, или такое формирование пары может быть изменено только вручную, эта форма выполнения обеспечивает возможность в некоторой степени автоматического формирования пары, за счет того, что, например, переданный от колонны стола адрес колонны принимается транспортировочным устройством, а затем используется в последующей связи с колонной стола в качестве собственного адреса.
Предпочтительно инфракрасный передатчик транспортировочного устройства при пуске в действие блока управления передает к инфракрасному приемнику колонны стола команду запроса, посредством которой инфракрасный передатчик формирования пары колонны стола запрашивается циклически передавать адрес колонны, причем парное рабочее состояние существует тогда, когда инфракрасный приемник формирования пары транспортировочного устройства также циклически принимает адрес колонны. Вышеуказанный пуск в действие может, например, быть реализован посредством приведения в действие в первый раз блока управления, посредством которого колонна стола конкретным образом управляется, то есть должна регулироваться для переноса опорной поверхности. Однако под пуском в действие может также пониматься включение блока управления, т.е. начало питания электрической энергией, если такая функция включения предусмотрена в блоке управления.
Посредством циклического приема адреса колоны может непрерывно проверяться существующее соединение прямой видимости между транспортировочным устройством и колонной стола. Как только больше не происходит циклический прием адреса колонны, парное рабочее состояние отменяется, и, тем самым, управляющая функция пульта управления по отношению к рассматриваемой колонне стола прекращается.
Предпочтительным образом парное рабочее состояние существует лишь до тех пор, пока инфракрасный приемник формирования пары циклически принимает один и тот же адрес колонны. Тем самым можно избежать того, что непреднамеренным образом не только одна, а несколько колонн столов будут реагировать на блок управления. Инфракрасный передатчик транспортировочного устройства посылает команду переноса предпочтительно только тогда, когда при приведении в действие элемента управления имеет место парное рабочее состояние. Если блоком управления является, например, ножной манипулятор, то при этой форме выполнения управляющая команда выдается на колонну стола, пока ножной манипулятор остается нажатым, и одновременно поддерживается парное рабочее состояние. Последнее предпочтительно проверяется посредством циклического приема адреса колонны.
Изобретение поясняется более подробно ниже со ссылкой на чертежи, на которых показано следующее:
Фиг.1 - блок-схема системы операционного стола согласно изобретению;
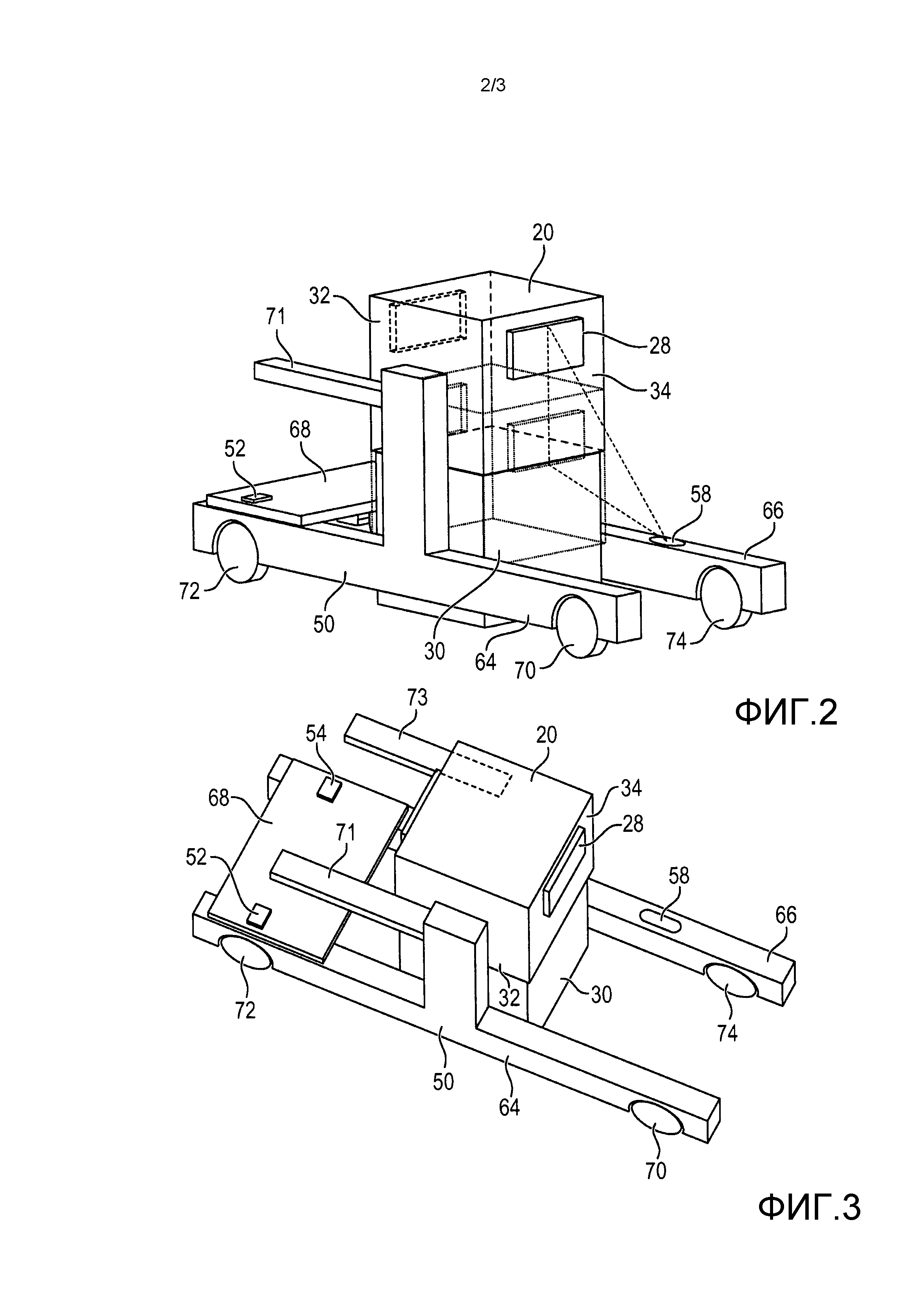
Фиг.2 - вид в перспективе расположения, образованного транспортировочным устройством и колонной стола;
Фиг.3 – другой вид в перспективе расположения согласно фиг.2;
Фиг.4 – схематичное представление, показывающее систему операционного стола в начале предоперационного переноса опорной поверхности;
Фиг.5 – схематичное представление, показывающее операционную систему в расположении переноса;
Фиг.6 – схематичное представление, показывающее операционную систему при установлении парного рабочего состояния;
Фиг.7 – схематичное представление, показывающее операционную систему в начале передачи опорной поверхности для пациента;
Фиг.8 – схематичное представление, показывающее операционную систему в конце передачи опорной поверхности для пациента; и
Фиг.9 – схематичное представление, показывающее операционную систему в конце предоперационного переноса опорной поверхности.
На фиг.1 показана блок-схема компонентов системы 10 операционного стола в соответствии с изобретением.
Система 10 операционного стола включает в себя колонну 20 стола, которая может механически связываться с опорной поверхностью 100 для пациента, и транспортировочное устройство 50, которое служит для транспортировки опорной поверхности 100 для пациента к колонне 20 стола и от нее.
На транспортировочном устройстве 50 расположены два ножных манипулятора (переключателя) 52 и 54, которые связаны с инфракрасным датчиком 56. Инфракрасный датчик 56 является частью обозначенного в целом как 58 первого инфракрасного приемопередающего блока. Первый инфракрасный приемопередающий блок 58 содержит наряду с инфракрасным передатчиком 56 инфракрасный приемник 60. Инфракрасный передатчик 56 выполнен, например, как светоизлучающий диод, испускающий инфракрасное излучение, в то время как инфракрасный приемник 60 формирования пары выполнен как фотодиод. Первый инфракрасный приемопередающий блок 58 образует вместе с обоими ножными манипуляторами 52 и 54 блок управления, обозначенный в общем как 62 на фиг.1.
Колонна 20 стола содержит механизм 22 переноса, который служит для того, чтобы связывать опорную поверхность 100 для пациента с колонной 20 стола и отсоединять от нее. Как колонна 20 стола, так и опорная поверхность 100 для пациента имеют для этого известные и дополнительно не описываемые здесь механические средства сопряжения, которые позволяют осуществлять механическое сцепление и расцепление.
Колонна 20 стола дополнительно включает в себя инфракрасный приемник 24, например, в форме фотодиода и инфракрасный передатчик 26 формирования пары, который выполнен, например, как светоизлучающий диод. Инфракрасный приемник 24 и инфракрасный передатчик 26 формирования пары образуют обозначенный на фиг.1 в общем как 28 второй инфракрасный приемопередающий блок, который при условии соединения прямой видимости с расположенным на транспортировочном устройстве 50 первым инфракрасным приемопередающим блоком 58 осуществляет сообщение посредством инфракрасных сигналов.
Содержащийся в колонне 20 стола механизм 22 переноса управляется для передачи опорной поверхности 100 для пациента в зависимости от команды переноса, обозначенной как Т на фиг.1.
Команда Т переноса передается от инфракрасного передатчика 56 первого инфракрасного приемопередающего блока 58 на инфракрасный приемник 24 второго инфракрасного приемопередающего блока 28, когда один из обоих ножных манипуляторов 52 и 54 приводится в действие, и в то же время существует парное рабочее состояние между инфракрасным передатчиком 56 и инфракрасным приемником 24. Для того чтобы установить это парное рабочее состояние, инфракрасный передатчик 56 передает при пуске в действие блока 62 управления команду А запроса, обозначенную на фиг.1 как А, к инфракрасному приемнику 24. Если существует соединение прямой видимости между расположенным на транспортировочном устройстве 50 инфракрасным передатчиком 56 и расположенным на колонне 20 стола инфракрасным приемником 24, то инфракрасный приемник 24 принимает команду А запроса. В этом случае содержащийся во втором инфракрасном приемопередающем блоке 28 инфракрасный датчик 26 формирования пары получает указание отвечать на команду А запроса циклической передачей адреса прибора, обозначенного на фиг.1 как G. Он принимается содержащимся в первом инфракрасном приемопередающем блоке 58 инфракрасным приемником 60 формирования пары.
Пока инфракрасный приемник 60 формирования пары в ответ на команду А запроса циклически принимает один и тот же адрес G прибора, расположенный на транспортировочном устройстве 50 инфракрасный передатчик 56 и расположенный на колонне 20 стола инфракрасный приемник 24 образуют пару друг с другом. Пока это парное рабочее состояние поддерживается, при приведенном в действие ножном манипуляторе 52 или 54 команда Т переноса принимается инфракрасным приемником 24 и применяется в колонне 20 стола для управления механизмом 22 переноса. Само собой разумеется, что выданная инфракрасным передатчиком 56 в форме инфракрасного сигнала команда Т переноса преобразуется в колонне 20 стола соответствующим образом в электрический сигнал, чтобы использоваться в управлении механизмом 22 переноса.
Фиг.2 и 3 показывают примерные формы выполнения транспортировочного устройства 50 и колонны 20 стола. При этом транспортировочное устройство 50 и колонна 20 стола показаны на фиг.2 и 3 в корректном расположении переноса по отношению друг к другу, в котором возможна передача (на фиг.2 и 3 не показанной) опорной поверхности 100 для пациента.
В показанной форме выполнения транспортировочное устройство 50 образовано из подвижной рамы, которая содержит две параллельные продольные балки 64, 66, поперечину 68, которая соединяет друг с другом обе продольные балки 64 и 66 на одном конце транспортировочного устройства 50, и две захватные части 71 и 73, которые расположены выше обеих продольных балок 64, 66 параллельно к ним. Транспортировочное устройство 50 включает в себя четыре ролика, которые распределены попарно по продольным балкам 64 и 66. Из четырех роликов на фиг.2 и 3 показаны только три ролика, обозначенные как 70, 72 и 74.
Колонна 20 стола состоит из двух телескопически взаимно перемещаемых частей 30 и 32 колонны. Колонна 20 стола может разъезжаться и съезжаться в вертикальном направлении, при этом обе части 30 и 32 колонны движутся относительно друг друга.
Первый инфракрасной приемопередающий блок 58, который содержит инфракрасный передатчик 56 и инфракрасный приемник 60 формирования пары, находится на верхней стороне продольной балки 66. Второй инфракрасный приемопередающий блок 28, который содержит инфракрасный приемник 24 и инфракрасный передатчик 26 формирования пары, расположен на верхней части 32 колонны 20 стола на боковой поверхности 34, которая в предопределенном расположении переноса обращена к первому инфракрасному приемопередающему блоку 58.
На фиг.2 показана характеристика излучения, с которой первый инфракрасный приемопередающий блок 58 (точнее говоря, его явно не показанный на фиг.2 инфракрасный передатчик 56) передает инфракрасные сигналы к колонне 20 стола. Характеристика излучения отличается пространственным углом, который, по существу, ограничен диапазоном передвижения, в пределах которого второй инфракрасный приемопередающий блок 28 перемещается в вертикальном направлении, когда обе части 30 и 32 колонны перемещаются относительно друг друга для регулировки колонны 20 стола. На фиг.2 верхняя граница перемещения второго инфракрасного приемопередающего блока 28 показана сплошными линиями, а нижняя граница перемещения - пунктирными линиями.
В форме выполнения, показанной на фиг.2, на боковой поверхности верхней части 32 колонны, противоположной боковой поверхности 34, расположен дополнительный инфракрасный приемопередающий блок, который конструктивно подобен второму инфракрасному приемопередающему блоку 28. Таким образом, существует два расположения переноса транспортировочного устройства 50 и колонны 20 стола, в которых может быть выполнен перенос опорной поверхности. Если должно быть возможным только одно корректное расположение переноса, то этот дополнительный инфракрасный приемопередающий блок может быть опущен.
Как лучше всего видно на фиг.3, оба ножных манипулятора 52 и 54 находятся на верхней стороне поперечины 68 в области продольных балок 64 и 66. Тем самым пользователь легко достает их ногой, чтобы привести в действие первый инфракрасный приемопередающий блок 58.
Со ссылками на фиг.4-9 ниже описывается пример предоперационного переноса опорной поверхности, который выполняется с операционной системой 10 в соответствии с изобретением.
На фиг.4 показано, как расположенная на транспортировочном устройстве 50 опорная поверхность 100 для пациента пододвигается к колонне 50 стола. На фиг.5 транспортировочное устройство 50 расположено таким образом, что оно по отношению к колонне 20 стола находится в предопределенном расположении переноса, которое обеспечивает возможность передачи опорной поверхности 100 для пациента на колонну 20 стола.
В этом расположении переноса затем расположенный на транспортировочном устройстве 50 первый инфракрасный приемопередающий блок 58 и расположенный на колонне 20 стола второй инфракрасный приемопередающий блок 28 формируют между собой пару за счет того, что первый инфракрасный приемопередающий блок 58 передает сначала команду А запроса, а затем второй инфракрасный приемопередающий блок 28 отвечает циклической передачей адреса G прибора, индивидуально заранее установленного для колонны 20 стола. Эта циклическая передача адреса G прибора регистрируется первым инфракрасным приемопередающим блоком 58, и таким образом устанавливается, что существует желательное парное рабочее состояние.
Если оба инфракрасных приемопередающих блока 58 и 28 образуют друг с другом пару, то при приведении в действие одного из обоих ножных манипуляторов 52 и 54 передается команда T переноса от первого инфракрасного приемопередающего блока 58 на второй инфракрасный приемопередающий блок 28, как наглядно показано на фиг.7. Пока ножной манипулятор 52 или 54 нажат, в соответствии с этим механизм 22 переноса, содержащийся в колонне 20 стола, управляется так, что колонна 20 стола передвигается вертикально вверх, как показано на фиг.8.
После того, как верхняя сторона колонны 20 стола входит в контакт с нижней стороной опорной поверхности 100 для пациента, опорная поверхность 100 для пациента поднимается с транспортировочного устройства 50 и передается на колонну 20 стола. Опорная поверхность 100 для пациента затем фиксируется известным образом на колонне 20 стола.
Наконец, транспортировочное устройство 50 перемещается от колонны 20 стола, как показано на фиг.9. Тем самым предоперационный перенос опорной поверхности завершен.
Послеоперационный перенос опорной поверхности, явно не показанный на чертежах, выполняется соответственно в обратной последовательности. Вновь сначала транспортировочное устройство 50 приводится по отношению к колонне 20 стола в корректное расположение переноса. Затем оба инфракрасных приемопередающих блока 28 и 58 объединяются в пару друг с другом. Затем, при приведении в действие ножного манипулятора 52, 54, механизм 22 переноса, содержащийся в колонне 20 стола, управляется для переноса опорной поверхности 100 для пациента на транспортировочное устройство 50. Наконец, установленная на транспортировочное устройство 50 опорная поверхность 100 для пациента транспортируется от колонны 20 стола.
Перечень ссылочных позиций
20 колонна стола
22 механизм переноса
24 инфракрасный приемник
26 инфракрасный передатчик формирования пары
28 второй инфракрасный приемопередающий блок
30, 32 части колонны
34 боковая поверхность
50 транспортировочное устройство
52, 54 ножной манипулятор
56 инфракрасный передатчик
58 первый инфракрасный приемопередающий блок
60 инфракрасный приемник формирования пары
64, 66 продольные балки
68 поперечина
71, 73 захватные части
70, 72, 74 ролики
100 опорная поверхность для пациента
Т команда переноса
А команда запроса
G адрес прибора
Реферат
Изобретение относится к системе операционного стола с транспортировочным устройством и направлено на повышение удобства пользования столом. Система операционного стола содержит транспортировочное устройство для транспортировки опорной поверхности для пациента, механически связываемую с опорной поверхностью для пациента колонну стола, которая имеет механизм переноса, который может управляться в зависимости от команды переноса для передачи опорной поверхности для пациента между транспортировочным устройством и колонной стола, и блок управления, приводимый в действие для генерации команды переноса. Блок управления имеет по меньшей мере один расположенный на транспортировочном устройстве элемент управления и расположенный на транспортировочном устройстве связанный с элементом управления инфракрасный передатчик, который при приведении в действие элемента управления передает команду переноса в форме инфракрасного сигнала, и на колонне стола расположен инфракрасный приемник, который принимает команду переноса. Для получения парного рабочего состояния между расположенным на транспортировочном устройстве инфракрасным передатчиком и расположенным на колонне стола инфракрасным приемником колонна стола имеет инфракрасный передатчик формирования пары для передачи адреса колонны, а транспортировочное устройство имеет инфракрасный приемник формирования пары для приема адреса колонны. 8 з.п. ф-лы, 9 ил.
Формула
Документы, цитированные в отчёте о поиске
Устройство для измерения положения операционного стола
Комментарии