Устройство и способ для управления операционным столом - RU2675442C2
Код документа: RU2675442C2
Чертежи



Описание
Изобретение относится к устройству и способу для управления операционным столом, который имеет по меньшей мере три компонента, выполненные с возможностью изменения своего положения с помощью органов управления, и по меньшей мере два приводных блока, с помощью которых положение первого компонента и второго компонента может изменяться относительно друг друга и относительно третьего компонента. Операционный стол имеет, кроме того, блок управления для управления приводными блоками, причем в блоке управления сохранено по меньшей мере одно первое положение первого компонента и второго компонента относительно друг друга и относительно третьего компонента.
Из документа DE 199 55 116 А1 известен блок управления для управления приводом опорной поверхности для пациента, снимаемой с колонны операционного стола, с компонентами, перемещаемыми с помощью электродвигателя, состоящий из средства энергоснабжения, средства управления и пульта управления. Пульт управления встроен в транспортировочную тележку для транспортировки опорной поверхности операционного стола.
Из документа DE 10 2007 062 200 А1 известен операционный стол с множеством компонентов, регулируемых с помощью органов управления. Состояние и/или изменение состояния по меньшей мере части органов управления регистрируется датчиками, причем сгенерированные датчиками сигналы подаются на устройство обработки.
Из документа DE 10 2005 054 230 А1 известны устройство и способ для двунаправленной инфракрасной передачи между операционным столом и пультом управления. Операционный стол и пульт управления являются, соответственно, участниками передачи инфракрасных данных и включают, соответственно, инфракрасный передатчик и инфракрасных приемник.
Из документа DE 10 2005 054 223 А1 известно устройство для регулировки операционного стола, которое имеет колонну операционного стола, на которой съемным образом размещена регулируемая опорная поверхность для пациента. Устройство содержит пульт управления для ввода команд регулирования для регулирования компонентов операционного стола. Команды регулирования могут непосредственно передаваться от пульта управления на регулируемую опорную поверхность.
Из документа DE 10 2005 053 754 А1 известно устройство для регулировки опорной поверхности для пациента операционного стола, которое включает несколько регулируемых относительно друг друга секций. По меньшей мере часть регулируемых секций связана с исполнительными элементами, которые являются управляемыми для регулировки соответствующих сегментов. Устройство ввода содержит средства для ввода относящихся к частям тела команд регулирования, которые ассоциированы с перемещением положения части тела или участка тела пациента, лежащего на опорной поверхности для пациента.
Как в стационарных операционных столах, так и в перемещаемых операционных столах и мобильных операционных столах, могут предусматриваться компоненты, регулируемые электродвигателями, как, например, колонна операционного стола, изменяемая по своей длине электродвигателем для изменения высоты опорной поверхности для пациента, расположенной на колонне операционного стола, верхняя часть колонны операционного стола, регулируемая по двум ортогональным осям для изменения наклона или крена (кантования) опорной поверхности для пациента, связанной с верхней частью колонны операционного стола, и/или компоненты опорной поверхности для пациента, регулируемые посредством электродвигателей.
Однако в некоторых операциях является желательным, повторно перемещать пациента с помощью соответствующего регулирования компонентов операционного стола в положение, которое пациент уже занимал до этого или которое занимали другие пациенты в предыдущих операциях, особенного тогда, когда это положение устанавливалось относительно затратным образом с помощью одного иди нескольких органов управления. Кроме того, при этом должно гарантироваться, что пациенту не причиняется ущерб при регулировании компонентов.
Задачей изобретения является предложить устройство и способ для управления операционным столом, посредством которых возможно простое и безопасное перемещение компонентов операционного стола по меньшей мере в одно первое положение этих компонентов.
Эта задача решается устройством для управления операционным столом с признаками пункта 1 формулы изобретения и способом для управления операционным столом с признаками независимого пункта формулы, относящемуся к способу. Предпочтительные варианты осуществления приведены в зависимых пунктах формулы изобретения.
В устройстве и способе для управления операционным столом сохраняется, в частности, по меньшей мере одно первое положение по меньшей мере первого компонента и второго компонента по отношению друг к другу и к третьему компоненту. Это положение предпочтительно сохраняется как информация о положении компонентов по отношению друг к другу и/или положение приводных блоков.
При активации первого органа управления приводные блоки управляются таким образом, что компоненты перемещаются в сохраненное положение. По меньшей мере один параметр управления сохраняется предварительно установленным, причем приводные блоки управляются для перемещения компонентов по меньшей мере из одного второго положения, отличающегося от сохраненного первого положения, в сохраненное первое положение в зависимости от сохраненного параметра управления. Тем самым может гарантироваться, что при перемещении компонентов из второго положения в первое положение соблюдаются условия, определенные посредством параметра управления, так что предотвращается опасность для пациента, лежащего на опорной поверхности для пациента, образованной посредством по меньшей мере части компонентов, по меньшей мере тогда, когда компоненты перемещаются из второго положения в первое положение.
Особенно предпочтительно, когда параметр управления включает по меньшей мере одно условие, которое должно соблюдаться при перемещении компонентов. Тем самым такое условие может просто устанавливаться и соблюдаться при перемещении компонентов из второго положения в первое положение или наоборот, благодаря чему можно избегать опасности для пациента, лежащего на опорной поверхности для пациента, образованной по меньшей мере частью компонентов.
Особенно предпочтительным является, если параметры управления в качестве условий включают допустимые степени свободы перемещения компонентов, допустимые угловые диапазоны углов положения компонентов по отношению друг к другу, возможность одновременного перемещения компонентов, возможность образующего серию перемещения компонентов, чередующееся перемещение компонентов, последовательное перемещение компонентов, допустимые скорости регулирования компонентов, допустимое распределение скоростей регулирования для скоростей регулирования компонентов, допустимые наклоны компонентов в пространстве и/или сохраненные последовательности процессов перемещения между несколькими положениями, причем условия могут также отдельно устанавливаться для отдельных участков общего процесса перемещения между двумя положениями. Параметр управления может также ограничивать перемещение отдельных компонентов, в частности, скорость перемещения компонента и может обозначаться как параметр перемещения. В частности, параметр управления для различных позиций регулирования компонентов может быть определен различным образом, в частности, обеспечивать возможность различных параметров ограничения или другой тип управления приводных блоков. Тем самым простым способом возможна индивидуальная настройка параметра управления для различных участков перемещения для регулируемого перемещения компонентов.
Первое и/или второе сохраненное положение может, в частности, быть нулевым положением операционного стола, передаточным положением для передачи опорной поверхности для пациента операционного стола на транспортировочную тележку, специфическим для операции исходным положением компонентов операционного стола и/или специфическим для операции положением оперативного вмешательства. Эти положения могут выбираться предпочтительно с помощью органов управления для управления операционным столом, в частности, с помощью пульта дистанционного управления, предпочтительно с помощью беспроводного пульта дистанционного управления, причем положения, по меньшей мере, частично сохранены как постоянные, неизменяемые положения или могут сохраняться как определяемые пользователем положения. Тем самым простым способом обеспечивается возможность очень гибкого манипулирования и простого управления операционным столом для различных операций.
Особенно предпочтительно, если первое положение и по меньшей мере одно второе положение сохранены предварительно установленными, причем блок управления устанавливает первое положение и второе положение отличающимися посредством многократного задействования первого органа управления. Альтернативно, блок управления может устанавливать первое положение при задействовании первого органа управления и второе положение при задействовании второго органа управления с помощью приводных блоков. Тем самым возможно очень простое и интуитивное управление операционным столом, так что возможна особенно простая смена между первым положением и вторым положением или сохраненными другими положениями.
Кроме того, является предпочтительным, если блок управления при деактивации первого органа управления и/или при деактивации второго органа управления останавливает перемещение компонентов также тогда, когда первое сохраненное положение и/или второе положение компонентов еще не достигнуто. Тем самым гарантируется, что регулируемое перемещение осуществляется только тогда, когда орган управления действительно задействован, так что предотвращается опасность для пациентов за счет неконтролируемого или непреднамеренного перемещения компонентов.
Альтернативно или дополнительно, процесс перемещения может прерываться, если по меньшей мере один компонент перемещен в положение, которое соответствует сохраненному положению. Перемещение других компонентов в положение, которое соответствует сохраненному положению, осуществляется только после возобновленного задействования органа управления, причем задействование органа управления, ассоциированного с положением, должно по меньшей мере кратковременно прерываться.
Особенно предпочтительно, если любое положение компонентов, устанавливаемое с помощью других органов управления посредством оператора, может сохраняться как предварительно установленное положение. Тем самым оператор, в частности, врач, которому поручена операция, может просто сохранять удобное ему для операции положение компонентов, которое он затем вновь может выбрать путем задействования соответствующего органа управления, так что блок управления тогда таким образом управляет приводными блоками, что компоненты снова располагаются в сохраненном положении.
Кроме того, является предпочтительным, если в блоке управления сохранено отличающееся от первого сохраненного положения второе положение первого компонента и второго компонента по отношению друг к другу и по отношению к третьему компоненту, если оператор с помощью других органов управления изменяет положение компонентов от первого сохраненного положения во второе сохраненное положение, если блок управления сохраняет осуществленный при этом процесс перемещения и/или выработанные для этого блоком управления информации управления для управления приводными блоками и если процесс перемещения и/или информация управления могут вызываться для повторного выполнения перемещения между обоими положениями с помощью первого органа управления и/или второго органа управления.
При этом особенно предпочтительно, если сохраненный процесс перемещения или сохраненная информация управления для перемещения компонентов из первого положения во второе положение выполняется инверсным образом для перемещения компонентов из второго положения в первое положение. Таким образом, обеспечивается простая возможность конфигурирования параметра управления за счет того, что конкретный процесс перемещения для перемещения между обоими положениями сохраняет параметр управления. Перемещение между первым положением и вторым положением для определения сохраняемого процесса перемещения обозначается также как так называемый цикл обучения, при котором перемещение или информация управления приводных блоков регистрируется, так что она может использоваться для последующего перемещения компонента между этими обоими положениями в обоих направлениях, то есть из первого положения во второе положение и из второго положения в первое положение. Тем самым возможно особенно простое и надежное манипулирование операционным столом, причем оператору простым способом обеспечивается удобство в повторном надежном приведении в действие сохраненных положений согласно заданному им процессу перемещения.
При этом является предпочтительным, если при перемещении компонентов из первого сохраненного положения во второе сохраненное положение осуществляется полностью обратный процесс перемещения для перемещения компонентов, как при перемещении компонентов из второго сохраненного положения в первое сохраненное положение. Тем самым может быть простым способом реализован уже упоминавшийся инверсный процесс перемещения между обоими положениями.
Кроме того, является предпочтительным, если первый компонент и второй компонент являются, соответственно, компонентом опорной поверхности для пациента операционного стола, и если третий компонент является колонной операционного стола и/или основанием колонны операционного стола. Компоненты опорной поверхности для пациента представляют собой головную панель, спинную панель, среднюю панель, первую цельную или составную ножную панель и/или вторую цельную или составную ножную панель. Опорная поверхность для пациента служит для расположения пациента и может включать дополнительные или альтернативные компоненты. Особенно предпочтительным является, если первый компонент представляет собой среднюю панель, связанную с верхней частью колонны операционного стола, и второй компонент является спинной панелью, связанной со средней панелью. Альтернативно или дополнительно второй компонент может являться цельной или составной ножной панелью, связанной со средней панелью.
Альтернативно или дополнительно, между отдельными компонентами также могут находиться компоненты удлинения для увеличения области лежания, предоставляемой в распоряжение соответствующим компонентом. Третий компонент предпочтительно представляет собой колонну операционного стола, причем для определения положения компонентов относительно колонны операционного стола может использоваться точка основания колонны операционного стола или точка верхней части колонны операционного стола. Альтернативно или дополнительно, в качестве третьего компонента может служить основание колонны операционного стола, причем в качестве основания колонны операционного стола в этой связи также может рассматриваться контактная поверхность, которой колонна операционного стола жестко связана с базирующим элементом стороны здания для базирования колонны операционного стола. Тем самым становится возможным простое определение положения компонентов относительно друг друга, за счет чего положение пациента, лежащего на опорной поверхности для пациента, может просто задаваться с помощью сохраненных установок.
Особенно предпочтительно, если операционный стол имеет по меньшей мере один блок регистрации положения. Блок регистрации положения регистрирует положение компонентов относительно друг друга и/или в пространстве. При регистрации положения компонентов в пространстве это может осуществляться, в частности, посредством указания положения компонентов в мировой системе координат. Блок регистрации положения предпочтительно регистрирует ход регулирования (перемещения), изменение во времени хода регулирования, скорость регулирования и/или изменение во времени скорости регулирования двигателя, служащего в качестве приводного блока, предпочтительно линейного привода, служащего в качестве приводного блока, и сохраняет зарегистрированную информацию. Блок регистрации положения имеет по меньшей мере один датчик, в частности, датчик ускорения, датчик положения, датчик поворота и/или шаговый счетчик для счета шагов шагового двигателя.
Особенно предпочтительным является, если приводные блоки содержат по меньшей мере один шаговый двигатель и если блок управления при изменении управления компонентами регистрирует последовательность шагов и/или изменение во времени последовательности шагов шагового двигателя и сохраняет в качестве информации. Тем самым возможна простая регистрация процесса перемещения компонента, приводимого посредством шагового двигателя, так что возможно простое повторение этого процесса перемещения.
Особенно предпочтительно, если блок управления дополнительно или альтернативно регистрирует продолжительность активации соответствующего приводного блока и/или активированную для этого приводного блока ступень скорости и сохраняет в качестве информации. С помощью этой сохраненной информации можно просто воспроизводить однажды выполненный процесс перемещения, если должен выполняться подобный процесс перемещения.
Способ с признаками независимого пункта формулы на способ может дополнительно развиваться с помощью предпочтительных вариантов осуществления, приведенных выше для устройства, причем достигаются те же предпочтительные эффекты.
Компоненты операционного стола могут регулироваться с помощью приводных блоков предпочтительно электродвигателями. Компоненты включают, в частности, например, изменяемую по длине с помощью электродвигателя колонну операционного стола для изменения высоты опорной поверхности для пациента, расположенной на колонне операционного стола, верхнюю часть колонны операционного стола, регулируемую по двум ортогональным осям для изменения наклона и кантования опорной поверхности для пациента, связанной с верхней частью колонны операционного стола, и/или регулируемые электродвигателем компоненты опорной поверхности для пациента.
Первый компонент и второй компонент в предпочтительной форме выполнения изобретения могут также по отношению к третьему компоненту располагаться в положении, в котором они в горизонтальной плоскости повернуты на 180° и/или в вертикальной плоскости размещены зеркальным образом, так что когда первый компонент и второй компонент являются составными частями опорной поверхности для пациента, а третий компонент является колонной операционного стола, опорная поверхность для пациента, повернутая на 180°, размещается на колонне операционного стола. Иначе говоря, опорная поверхность для пациента может в двух различных ориентациях связываться с колонной операционного стола, предпочтительно с верхней частью колонны операционного стола.
При соединении опорной поверхности для пациента с колонной операционного стола опорная поверхность для пациента с помощью транспортировочной тележки может с двух различных направлений устанавливаться на колонну операционного стола и соединяться с ней. Первая ориентация обозначается при этом как нормальная ориентация, а вторая ориентация – как реверсивная ориентация.
Если опорная поверхность для пациента, повернутая на 180°, соединяется с колонной операционного стола относительно расположения опорной поверхности для пациента к моменту времени сохранения положения компонентов, то положение первого и второго компонента относительно третьего компонента в вертикальной плоскости, особенно в отношении кантования и наклона компонентов или опорной поверхности для пациента, следует зеркально отобразить. Также следует зеркально отобразить в этой вертикальной плоскости сохраненный процесс перемещения между двумя сохраненными положениями. Вертикальная плоскость предпочтительно располагается таким образом, что поперечная ось опорной поверхности для пациента и/или поперечная ось средней панели опорной поверхности для пациента в нулевом положении опорной поверхности для пациента лежит в этой вертикальной плоскости. Эта поперечная ось предпочтительно ортогональна к продольной оси опорной поверхности для пациента или средней панели. Таким образом, как сохраненные положения, так и сохраненные процессы перемещения между двумя положениями и сохраненный параметр управления, которые были сохранены в нормальной ориентации опорной поверхности для пациента, также используются в реверсивной ориентации опорной поверхности для пациента. Таким образом, при сохранении положения и/или процесса перемещения в нормальной ориентации опорной поверхности для пациента, в реверсивной ориентации опорной поверхности для пациента производят действия соответственно в зеркальном отображении, то есть процесс перемещения для перемещения компонентов относительно друг друга является зеркально отображенным в вертикальной плоскости. Если, например, часть опорной поверхности для пациента образована другими или дополнительными компонентами или имеются внешние приспособления, которые ограничивают перемещение компонентов операционного стола, так что сохраненное положение компонентов не может быть достигнуто, то предпочтительно предусматривается, что перемещение компонентов осуществляется до положения, наиболее близкого к сохраненному положению компонентов. Предпочтительным образом, сохраненный процесс перемещения выполняется до тех пор, пока не будет достигнуто заданное ограничение перемещения по меньшей мере одного компонента. Это особенно предпочтительно тогда, когда измененная конструкция опорной поверхности для пациента или внешние устройства ограничивают перемещение компонентов. Компоненты тогда перемещаются в положение, пространственно наиболее близкое к сохраненному положению.
Дальнейшие признаки и преимущества изобретения вытекают из последующего описания, которое более подробно поясняет изобретение на основе примеров выполнения со ссылками на приложенные чертежи, на которых показано следующее:
Фиг. 1а – операционный стол с несколькими компонентами, регулируемыми с помощью органов управления, обеспеченных посредством беспроводного пульта дистанционного управления, в исходном положении;
Фиг. 1b – пульт дистанционного управления и операционный стол по фиг. 1а после регулировки продольного наклона, исходя из исходного положения по фиг. 1а;
Фиг. 1с - пульт дистанционного управления и операционный стол по фиг. 1а и 1b во втором положении регулирования по отношению к показанному на фиг. 1а исходному положению, причем опорная поверхность для пациента повернута относительно оси поворота, проходящей ортогонально к ее продольной оси для регулирования продольного наклона, и дополнительно компоненты опорной поверхности для пациента повернуты относительно нескольких осей вращения по отношению к средней панели опорной поверхности для пациента;
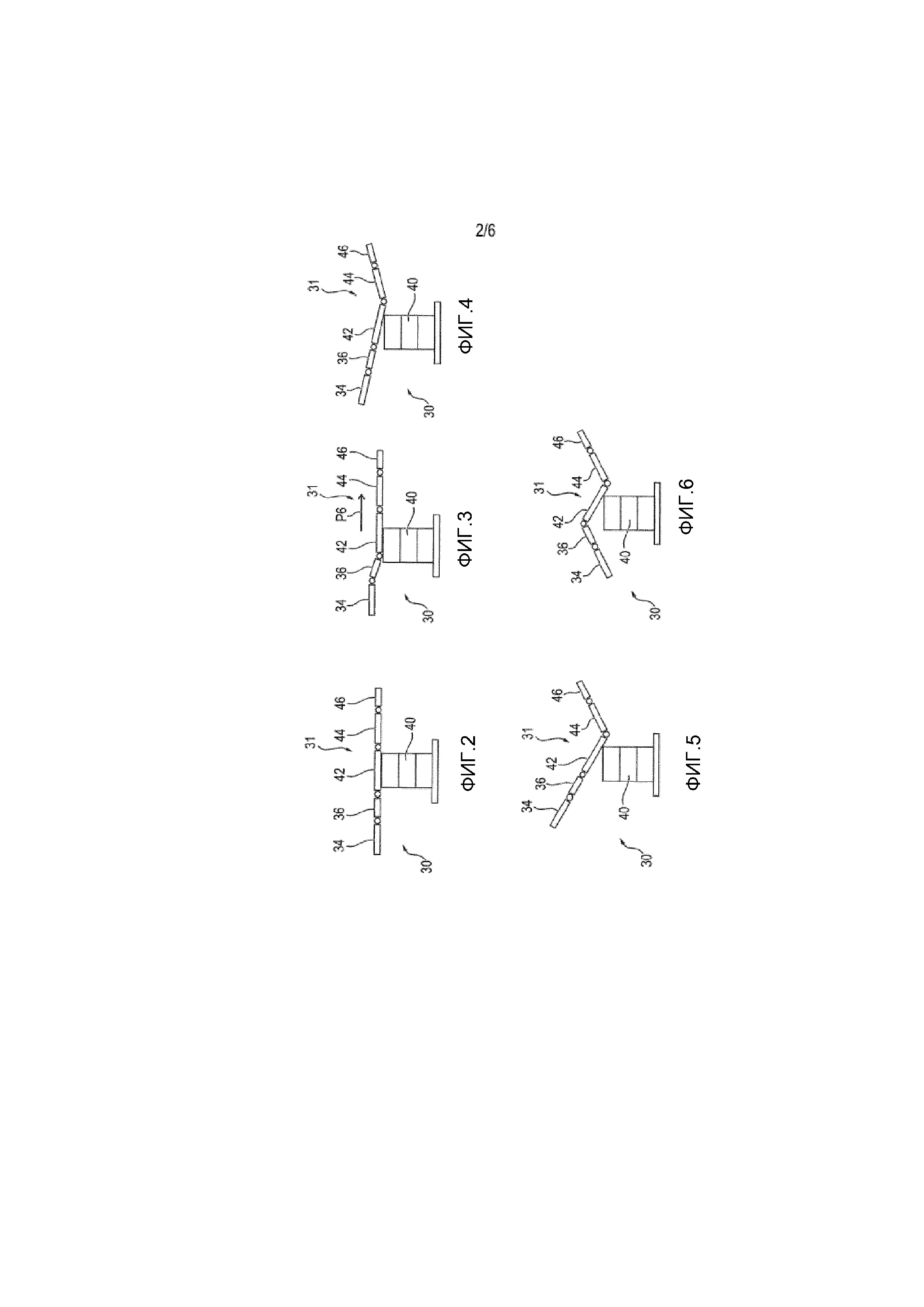
Фиг. 2 - схематичный вид сбоку операционного стола в нулевом положении;
Фиг. 3 – схематичный вид сбоку операционного стола в передаточном положении;
Фиг. 4 - схематичный вид сбоку операционного стола в исходном операционном положении;
Фиг. 5 - схематичный вид сбоку операционного стола в первом определенном пользователем положении;
Фиг. 6 - схематичный вид сбоку операционного стола во втором определенном пользователем положении;
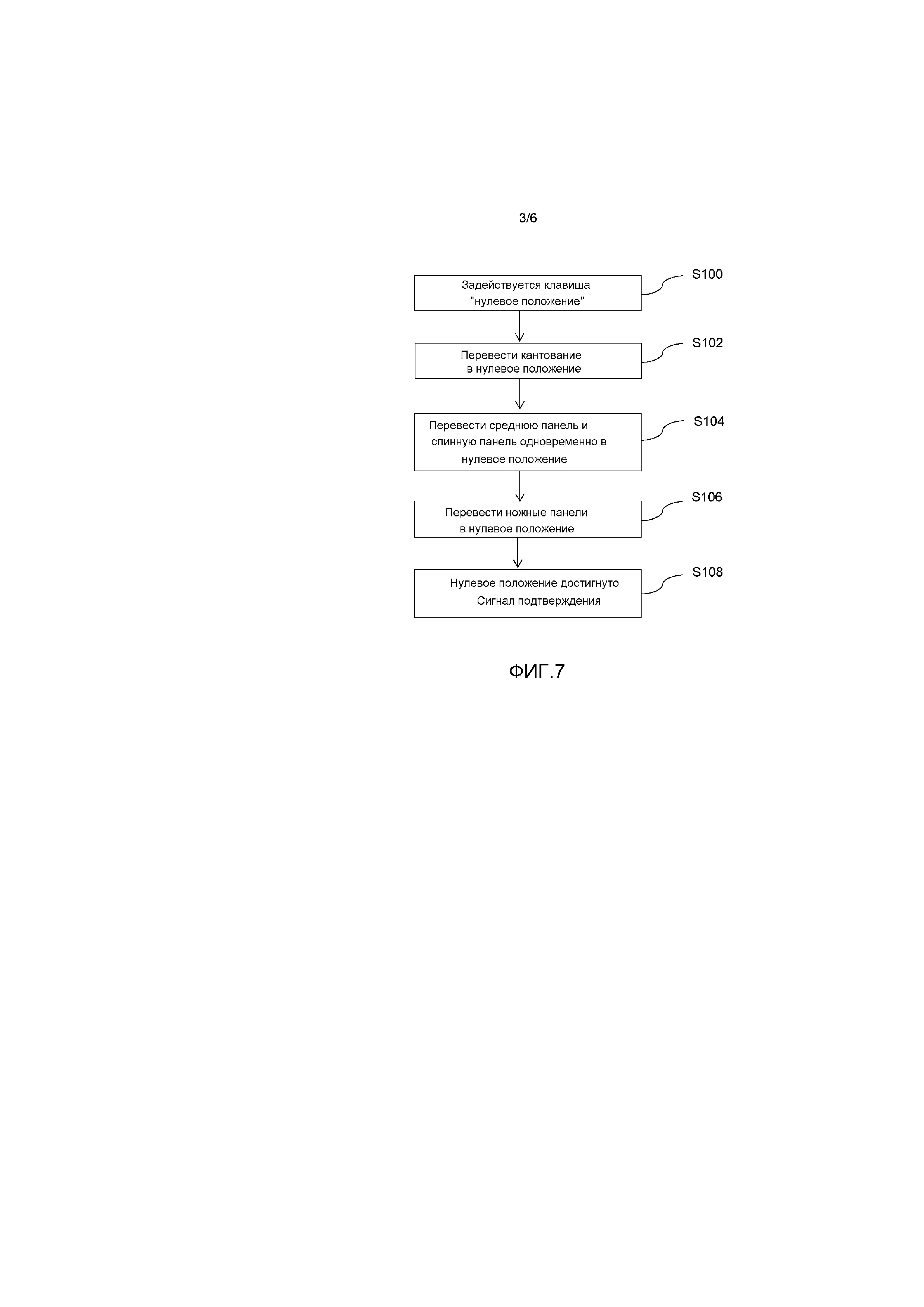
Фиг. 7 - первая схема процесса для управления перемещением компонентов операционного стола, исходя из не представленного операционного положения компонентов, в показанное на фиг. 2 нулевое положение операционного стола с одновременным перемещением наклона средней панели и спинной панели;
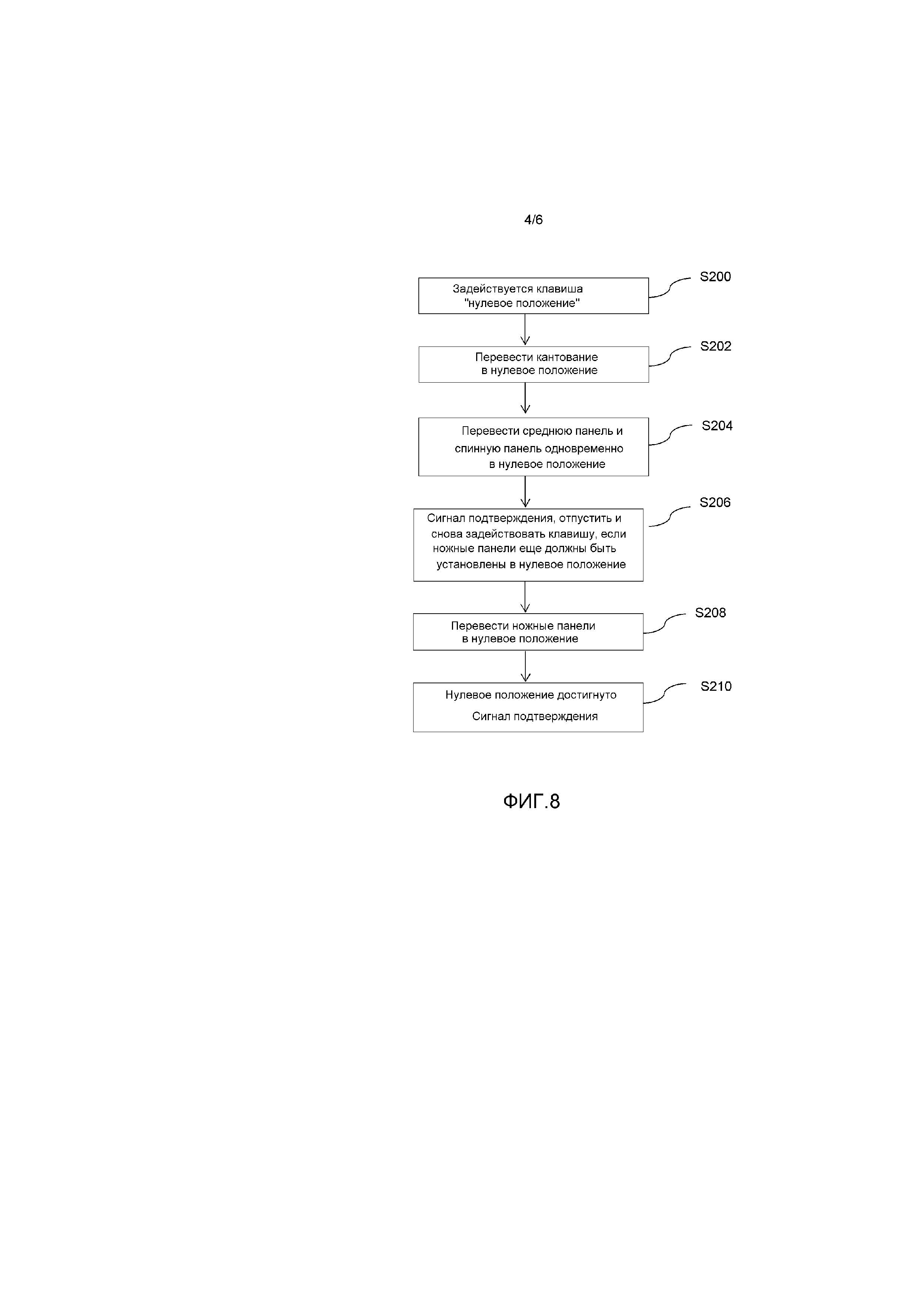
Фиг. 8 - вторая схема процесса для управления перемещением компонентов операционного стола, исходя из не представленного положения компонентов операционного стола, в показанное на фиг. 2 нулевое положение, при котором, в противоположность процессу на фиг. 7, предусмотрен промежуточный останов;
Фиг. 9 - схема процесса для управления перемещениями компонентов операционного стола, исходя из не представленного операционного положения компонентов, в нулевое положение по фиг. 2 с промежуточным остановом и при активации приводов регулирования компонентов друг за другом;
Фиг. 10 – схема процесса для перемещения компонентов операционного стола 30 из не представленного операционного положения в представленное на фиг. 3 передаточное положение.
Фиг. 1а показывает устройство 10 с пультом 12 дистанционного управления, который имеет несколько органов 14-28 управления, с помощью которых регулируемые компоненты 32-46 операционного стола 30 могут регулироваться, то есть изменять свое положение в пространстве и/или по отношению к другим компонентам 32-46. Отдельные компоненты 32-46 или группы этих компонентов 32-46 снабжены органами 14-28 управления пульта 12 дистанционного управления, так что при задействовании органа 14-18 управления выполняется соответствующее действие регулирования компонента 32-46 или группы компонентов, снабженных этим органом 14-28 управления, с помощью предусмотренного для этого приводного блока. Примером является приводной блок 41 для изменения длины колонны 40 операционного стола. На нижнем конце колонны 40 операционного стола предусмотрено основание 50 колонны операционного стола. На противолежащем конце колонна 40 операционного стола соединена с опорной поверхностью 31 для пациента, включающей компоненты 32-36, 42-46. С помощью приводного блока 41 длина колонны 40 операционного стола может, таким образом, варьироваться, и, тем самым, высота опорной поверхности 31 для пациента над полом, то есть в направлении стрелок Р1 и Р2, может изменяться, чтобы привести пациента, лежащего на опорной поверхности 31 для пациента, в положение, подходящее для проводимой операции.
Операционный стол 30 содержит дополнительные непоказанные приводные блоки для изменения положения опорной поверхности 31 для пациента, в частности, для регулировки продольного наклона или для регулировки предельного наклона (крена) опорной поверхности 31 для пациента, а также для регулировки отдельных компонентов опорной поверхности 31 для пациента по отношению к другим компонентам, как это, в частности, показано на фиг. 1с. На фиг. 1b опорная поверхность 31 для пациента повернута относительно ее продольной оси 54 в направлении стрелки Р3, так что опорная поверхность 31 для пациента наклонена вбок. Такой боковой наклон обозначается как регулировка предельного наклона или кантование опорной поверхности 31 для пациента. Как можно видеть на средней панели 42 опорной поверхности 31 для пациента на фиг. 1с, опорная поверхность 31 для пациента по отношению к фиг. 1а повернута относительно оси 56 поворота, проходящей ортогонально к продольной оси 54 опорной поверхности 31 для пациента, в направлении стрелки Р4, так что осуществляется регулировка продольного наклона опорной поверхности 31 для пациента. Эта регулировка продольного наклона также обозначается только как наклон опорной поверхности 31 для пациента. Кроме того, с помощью приводного блока 41 длина колонны 40 операционного стола уменьшается, так что опорная поверхность 31 для пациента снижается в направлении стрелки Р2.
Кроме того, положение спинной панели 44 по отношению к средней панели 42 изменяется посредством поворота относительно оси 58 поворота, и положение головной панели 46 по отношению к спинной панели 44 опорной поверхности 31 для пациента - путем поворота относительно оси 60 поворота. Также положение ножных панелей, включающих сегменты 34 и 36 или 32 и 38, изменяется по отношению к средней панели 42 опорной поверхности 31 для пациента посредством соответствующего поворота сегментов 32-38 относительно осей 62, 64 и 66 поворота. Уменьшенная высота опорной поверхности 31 для пациента указана стрелкой Р5 на фиг. 1с.
Фиг. 2 показывает схематичный вид сбоку операционного стола 30, в котором компоненты 32-46 расположены в так называемом нулевом положении, в котором средняя панель 42 расположена посредине на колонне 40 операционного стола.
Фиг. 3 показывает схематичный вид сбоку операционного стола, в котором компоненты 32-46 расположены в передаточном положении, в котором компоненты 32-38, 42-46 опорной поверхности 31 для пациента за счет выдвижения телескопической колонны 40 операционного стола расположены выше, чем в нулевом положении, и причем компоненты 32-38, 42-46 опорной поверхности 31 для пациента перемещены в направлении стрелки Р6, т.е. в направлении продольной оси 54 опорной поверхности 31 для пациента, в передаточное положение для приемки опорной поверхности для пациента посредством транспортировочной тележки для транспортировки опорной поверхности 31 для пациента, отделенной от колонны 40 операционного стола.
Фиг. 4 показывает схематичный вид сбоку операционного стола 30, в котором компоненты 32-46 расположены в исходном операционном положении, в котором опорная поверхность 31 для пациента повернута относительно оси 56 поворота, так что средняя панель 42 и ножные панели 32-38 расположены наклонно, и причем спинная секция 44 с головной секцией 46 повернуты по отношению к средней панели 42 относительно оси 48 поворота, так что они по отношению к средней панели 42 имеют противоположный наклон.
Фиг. 5 показывает схематичный вид сбоку операционного стола 30, в котором компоненты 32-46 расположены в первом определенном пользователем операционном положении, в котором наклон средней панели 42 и ножных панелей 32-38, в отличие от операционного исходного положения по фиг. 4, увеличен. Кроме того, также противоположный наклон спинной панели 44 с головной панелью 44-46 по отношению к ножным панелям 32-38 увеличен.
Фиг. 6 показывает схематичный вид сбоку операционного стола 30, в котором компоненты 32-46 расположены во втором определенном пользователем операционном положении, в котором ножные панели 32-38, в отличие от первого определенного пользователем положения, по отношению к средней панели 42 согнуты, так что они имеют тот же наклон, что и спинная панель 44 и головная панель 46.
В представленном примере выполнения изображенное на фиг. 2 нулевое положение соответствует органу 18 управления, показанное на фиг. 4 операционное исходное положение соответствует органу 26 управления, показанное на фиг. 5 первое определенное пользователем операционное положение соответствует органу 28 управления, и представленное на фиг. 6 второе определенное пользователем операционное положение соответствует органу 24 управления пульта 12 дистанционного управления. Таким образом, нулевое положение, операционное исходное положение, первое определенное пользователем положение, а также второе определенное пользователем положение могут устанавливается из любого произвольного положения просто путем приведения в действие соответствующих органов 18, 24-28 управления. Операционное исходное положение, первое определенное пользователем операционное положение и второе определенное пользователем операционное положение однократно устанавливаются с помощью дополнительных органов 14, 16, 20, 22 управления пульта дистанционного управления и затем сохраняются в ассоциации с соответствующим органом 18, 24, 26, 28 управления, так что это соответствующее положение компонентов 32-46 может активироваться с помощью органов 18, 24, 26, 28 управления и тем самым и во время операции может просто устанавливаться с помощью пульта 12 дистанционного управления. При этом перемещение из любого положения в сохраненное положение компонентов 32-46 осуществляется лишь в то время, пока активирован соответствующий орган 18, 24, 26, 28 управления. Таким образом, перемещение немедленно останавливается, если соответствующий орган 18, 24, 26, 28 управления больше не задействован. В альтернативных формах выполнения перемещение может продолжаться до тех пор, пока не будет достигнуто промежуточное положение или конечное положение, ассоциированное с соответствующим органом 18, 24, 26, 28 управления, то есть нулевое положение, операционное исходное положение, первое определенное пользователем операционное положение или второе определенное пользователем операционное положение.
Фиг. 7 показывает схему процесса для перемещения компонентов 32-46 операционного стола 30 в показанное на фиг. 7 нулевое положение. Процесс на этапе S100 начинается тем, что ассоциированный с нулевым положением орган 18 управления приводится в действие оператором. Затем кантование операционного стола 30 на этапе S102 переводится в нулевое положение, то есть опорная поверхность 31 для пациента поворачивается относительно оси 54 вращения до тех пор, пока ортогональная к ней ось 56 вращения не будет расположена в горизонтальной плоскости.
Затем одновременно наклон опорной поверхности 31 для пациента или средней панели 42 опорной поверхности 31 для пациента на этапе S104 поворачивается относительно оси 56 поворота до тех пор, пока также продольная ось 60 опорной поверхности 31 для пациента не будет расположена в горизонтальной плоскости. Одновременно положение спинной панели 44 относительно оси 58 вращения изменяется в нулевое положение, так что затем поверхности как средней панели 42, так и спинной панели 44 ориентируются горизонтально.
Затем ножные панели 32-38 с помощью соответствующих приводов поворачиваются относительно осей 62, 64, 66 до тех пор, пока поверхности этих ножных панелей 32-38 не будут расположены горизонтально, так что затем на этапе S108 достигается нулевое положение операционного стола 30, и блок 52 управления операционного стола выдает сигнал подтверждения через пульт 12 дистанционного управления или другое подходящее средство вывода.
На фиг. 8 показана схема процесса для перемещения компонентов 32-46 операционного стола 30 в нулевое положение альтернативно показанному на фиг. 7 процессу. Этапы S200-S210 процесса по фиг. 8 отличаются от процесса по фиг. 7 дополнительным этапом S206. Этапы S200-S204 совпадают с этапами S100-S104, и этапы S208 и S210 совпадают с этапами S106 и S108. После одновременного перемещения средней панели 42 и спинной панели 44 в соответствующие нулевые положения на этапе S204, на этапе S206 выдается сигнал подтверждения, и никакое дальнейшее перемещение компонентов 32-46 в нулевое положение не активируется, пока орган 18 управления вновь не будет задействован. Для этого орган 18 управления должен кратковременно не приводиться в действие, а затем снова приводиться в действие, если также другие компоненты, в данном примере выполнения ножные панели 32-38, должны будут затем переводиться в нулевое положение. Путем остановки перемещения после перемещения средней панели 42 и спинной панели 44 в нулевое положение, состояние пациента может еще раз контролироваться, прежде чем будет активировано перемещение других компонентов 32-38 в их нулевое положение. Последующее перемещение ножных панелей 32-38 в их нулевое положение на этапе S208 и последующая выдача сигнала подтверждения на этапе S210 осуществляется аналогичным образом, как уже описано в связи с фиг. 7.
На фиг. 9 показана схема процесса для процесса управления перемещением компонентов 32-46 операционного стола 30 в нулевое положение. Этапы S300 и S302 совпадают с этапами S200 и S202, и этапы S308-S312 совпадают с этапами S206-S210 процесса на фиг. 8. Одновременное перемещение наклона средней панели 42 и спинной панели 44 на этапе S204 осуществляется в процессе по фиг.9, в отличие от процесса на фиг. 8, не одновременно, а последовательно, причем сначала на этапе S304 средняя панель перемещается в нулевое положение, а затем на этапе S306 спинная панель 44 перемещается в ее нулевое положение.
На фиг. 10 показана схема процесса для управления перемещением компонентов 32-46 в показанное на фиг. 3 передаточное положение. Процесс на этапе S400 начинается с активации ассоциированного с передаточным положением органа 26 управления пульта 12 дистанционного управления. Затем кантование средней панели 42 на этапе S402 переводится в нулевое положение. Затем на этапе S404 наклон средней панели 42 и спинной панели 44 одновременно приводится в нулевое положение. Затем на этапе S406 ножные панели 32-38 перемещаются в нулевое положение. Затем осуществляется продольное смещение опорной поверхности 31 для пациента в направлении стрелки Р6 и затем изменение высоты опорной поверхности 31 для пациента в показанное на фиг. 3 более высокое по сравнению с нулевым положением передаточное положение за счет того, что с помощью приводного блока 41 колонны 40 операционного стола колонна 40 операционного стола выдвигается на соответствующую высоту. После достижения передаточного положения на этапе S412 выдается сигнал подтверждения посредством операционного стола 30 и/или пульта 12 дистанционного управления. Аналогичным образом, как описано в связи с фиг. 8 и 9, также для процесса по фиг. 10 после достижения нулевого положения компонента 42, 44 движение других компонентов 32-38 может быть остановлено до тех пор, пока не последует новый сигнал ввода. Такое прерывание перемещения может также осуществляться во всех показанных на фиг. 7-10 процессах после достижения промежуточного положения или конечного положения компонента 32-46, чтобы побуждать оператора к тому, чтобы контролировать состояние пациента перед дальнейшим перемещением компонентов 32-46 операционного стола 30.
Первый компонент 42 и второй компонент 44 в предпочтительной форме выполнения изобретения могут также по отношению к третьему компоненту 40 располагаться в положении, в котором они в горизонтальной плоскости повернуты на 180° и/или в вертикальной плоскости расположены зеркальным образом, так что если первый компонент 42 и второй компонент 44 являются составными частями опорной поверхности 31 для пациента операционного стола 30, а третий компонент является колонной 40 операционного стола, то опорная поверхность 31 для пациента располагается на колонне 40 операционного стола как повернутая на 180°. Иначе говоря, опорная поверхность 31 для пациента может связываться с колонной 40 операционного стола, предпочтительно с верхней частью колонны операционного стола, в двух различных ориентациях.
При соединении опорной поверхности 31 для пациента с колонной 30 операционного стола опорная поверхность 31 для пациента может с помощью транспортировочной тележки устанавливаться на колонну 40 операционного стола с двух различных направлений и связываться с ней. При этом первая ориентация обозначается как нормальная ориентация, а вторая ориентация – как реверсивная ориентация.
Если опорная поверхность 31 для пациента, повернутая на 180°, соединяется с колонной 40 операционного стола относительно расположения опорной поверхности 31 для пациента к моменту времени сохранения положения компонентов 32-46, то положение первого и второго компонента 42, 44 относительно третьего компонента 40 в вертикальной плоскости, особенно в отношении кантования и наклона компонентов 32-38, 42-46 или опорной поверхности 31 для пациента, следует зеркально отобразить. Также следует зеркально отобразить в этой вертикальной плоскости сохраненный процесс перемещения между двумя сохраненными положениями. Вертикальная плоскость предпочтительно располагается таким образом, что поперечная ось 56 опорной поверхности 31 для пациента и/или поперечная ось 56 средней панели 42 опорной поверхности 31 для пациента в нулевом положении опорной поверхности 31 для пациента лежит в этой вертикальной плоскости. Эта поперечная ось 56 предпочтительно ортогональна к продольной оси 54 опорной поверхности для пациента или средней панели 44. Таким образом, как сохраненные положения, так и сохраненные процессы перемещения между двумя положениями и сохраненный параметр управления, которые были сохранены в нормальной ориентации опорной поверхности 31 для пациента, также используются в реверсивной ориентации опорной поверхности 31 для пациента. Таким образом, при сохранении положения и/или процесса перемещения в нормальной ориентации опорной поверхности 31 для пациента, в реверсивной ориентации опорной поверхности 31 для пациента производят действия соответственно в зеркальном отображении, то есть процесс перемещения для перемещения компонентов 32-46 относительно друг друга зеркально отражен в вертикальной плоскости. Если, например, часть опорной поверхности 31 для пациента образована другими и/или дополнительными компонентами или имеются внешние приспособления, которые ограничивают перемещение компонентов 32-46 операционного стола 30, так что сохраненное положение компонентов 32-46 не может быть достигнуто, то предпочтительно предусматривается, что перемещение компонентов 32-46 осуществляется до положения, наиболее близкого к сохраненному положению компонентов 32-46. Предпочтительным образом, сохраненный процесс перемещения выполняется до тех пор, пока не будет достигнуто заданное ограничение перемещения по меньшей мере одного компонента 32-46. Это особенно предпочтительно тогда, когда измененная конструкция опорной поверхности 31 для пациента или внешние устройства ограничивают перемещение компонентов 32-46. Компоненты 32-46 тогда перемещаются в положение, пространственно наиболее близкое к сохраненному положению.
Перечень ссылочных позиций
10 операционный стол
12 пульт дистанционного управления
14-28 орган управления
30 операционный стол
31 опорная поверхность для пациента
32-38, 42-46 компоненты
40 колонна операционного стола
41 приводной блок
50 основание колонны операционного стола
52 блок управления
53 аккумулятор
54 продольная ось опорной поверхности для пациента
56 поперечная ось опорной поверхности для пациента
58-66 оси качания
Р1-Р6 стрелки направления
S100-S412 этапы способа
Реферат
Изобретение относится к устройству и способу управления операционным столом и направлено на повышение безопасности использования стола. Устройство и способ для управления операционным столом, который имеет компоненты, выполненные с возможностью изменения своего положения с помощью органов управления. Операционный стол имеет приводные блоки, с помощью которых положение первого компонента и второго компонента может изменяться относительно друг друга и относительно третьего компонента. В блоке управления для управления приводными блоками сохранено первое положение первого компонента и второго компонента относительно друг друга и относительно третьего компонента. При активации первого органа управления приводные блоки управляются таким образом, что компонент перемещается в сохраненное первое положение. В блоке управления один параметр управления сохраняется предварительно установленным, и причем блок управления управляет приводными блоками для перемещения компонентов из одного второго положения, отличающегося от сохраненного первого положения, в сохраненное первое положение в зависимости от сохраненного параметра управления. 2 н. и 10 з.п. ф-лы, 12 ил.
Формула
Документы, цитированные в отчёте о поиске
Устройство для измерения положения операционного стола
Комментарии