Манипулятор кранового типа - RU188048U1
Код документа: RU188048U1
Чертежи


Описание
Полезная модель относится к подъемно-транспортному машиностроению, а именно к манипуляторам с ручным управлением, предназначенным для механизации работ, связанных с погрузочно-разгрузочными операциями в мелкосерийном производстве.
Известен манипулятор с программным управлением для перегрузки крупногабаритных заготовок, описанный в авторском свидетельстве СССР №846268, МПК B25J 5/00, опублик. 15.07.1981 г., который включает в себя каретку горизонтальных перемещений, телескопическую руку, механизм подъема руки, поворота руки, схват. Вертикальное перемещение заготовок осуществляется при выдвижении и складывании телескопической руки, питаемой энергией привода механизма выдвижения руки, которая реализована с применением винтовых пар. Горизонтальное перемещение осуществляется путем перемещения каретки по подвесным путям манипулятора.
Также известен манипулятор, описанный в патенте на изобретение РФ №2090353 МПК B25J 18/00, опублик. 20.09.1997 г., который состоит из основания, телескопической руки, механизма подъема груза и схвата. Телескопическая рука, в состав которой входят винтовые конические пружины и гибкий элемент, закрепленный одним концом на последней секции руки, другим на намоточном барабане, осуществляет вертикальное перемещение груза.
Наиболее близким к манипулятору кранового типа является крановый манипулятор по авторскому свидетельству СССР №562494, кл. В66С 17/16, B25J 5/04, опублик. 25.06.1977 г., который принят в качестве прототипа. Манипулятор содержит подвижный мост с горизонтально перемещающейся по нему тележкой (у нас тележка горизонтальных перемещений груза), несущую вертикальную телескопическую штангу с захватом и механизмами привода управления, смонтированными в корпусе штанги, и вспомогательный захват с корпусом в виде коромысла, два шарнирно установленных на штанге параллельных локтя.
Недостатками существующих аналогов и прототипа является проблема их применения в современных условиях мелкосерийного производства, когда необходимо штучное перемещение грузов из одной позиции в другую в широкой рабочей зоне манипулятора. Но это не исключает применение перечисленных аналогов и прототипа.
Задачей, на решение которой направлена заявляемая полезная модель является: расширение арсенала технических средств, позволяющих механизировать ручные операции по перемещению грузов различных форм и размеров, в том числе нестандартных и крупногабаритных, обработке деталей, монтажу, демонтажу оборудования в производственных цехах при мелкосерийном выпуске товаров.
Технический результат заключается в реализации конструкции манипулятора кранового типа, который осуществляет движение в вертикальной и горизонтальной плоскостях, а также поворот вокруг центральной оси манипулятора. Механизм перемещений груза с гибкими механическими передачами содержит электрический привод системы вертикальных перемещений груза, систему горизонтальных перемещений груза и систему поворота моста вокруг центральной оси.
Достигается технический результат за счет того, что манипулятор кранового типа, содержащий подвижный мост, выполненный в виде рельсовых направляющих, перемещающуюся по ним в горизонтальной плоскости тележку горизонтальных перемещений груза, исполнительный механизм вертикальных перемещений груза, содержащий электромеханический привод вертикальных перемещений груза, и захват для подвешивания груза, причем он снабжен центральной поддерживающей опорой, на которой расположены электромеханический привод и подвижный мост, при этом электромеханический привод состоит из электрического двигателя, редуктора, муфты, грузоподъемного барабана и электромагнитного тормоза, исполнительный механизм вертикальных перемещений груза дополнительно содержит канатную передачу в две ветви, соединенную с грузом через захват, попарно расположенные четыре направляющих блока, закрепленные на тележке горизонтальных перемещений груза на двух противоположных сторонах, и уравнительный блок, причем канатная передача закреплена на грузоподъемном барабане электромеханического привода и огибает направляющие и уравнительный блоки, при этом для поворота подвижного моста вокруг центральной поддерживающей опоры манипулятор снабжен поддерживающими подвижный мост дополнительными рельсовыми направляющими дугообразной формы, установленными на поддерживающих опорах, и перемещающейся по упомянутым направляющим тележкой с роликами.
Отличительной особенностью заявляемого устройства является: мостовая конструкция манипулятора кранового типа для выполнения операций по перемещению грузов в трехмерном пространстве, разделяющая сложное движение груза на вертикальную и горизонтальные составляющие; использование в качестве исполнительного механизма вертикальных перемещений груза манипулятора канатной передачи; конструкция системы горизонтальных перемещений груза и системы поворота моста вокруг центральной поддерживающей опоры выполнена с применением рельсовых направляющих тележек и опорных подшипников.
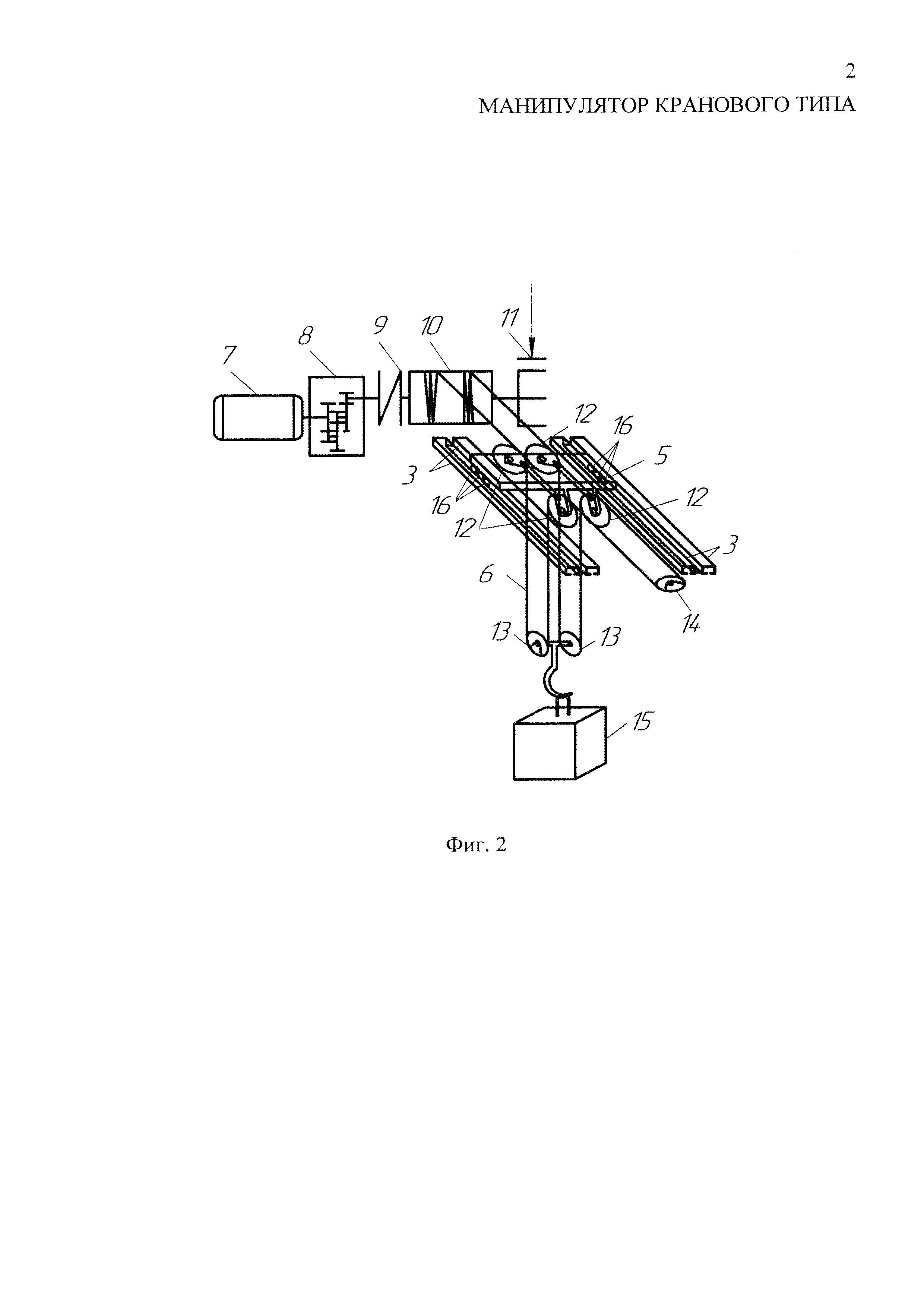
Сущность предлагаемой полезной модели представлена на: Фиг. 1 - система вертикальных перемещений груза; Фиг. 2 - система горизонтальных перемещений груза; Фиг. 3 - система поворота моста вокруг центральной поддерживающей опоры.
Система вертикальных перемещений груза включает в себя электрический двигатель 7, редуктор 8, муфту 9, грузоподъемный барабан 10, электромагнитный тормоз 11, канатную передачу 6, направляющие блоки 12 и 13, уравнительный блок 14, груз 15. Канатная передача 6 выполнена в две ветви и крепится к грузоподъемному барабану 10 двумя концами с противоположных сторон, канатная передача 6 огибает направляющие и уравнительный блоки в следующей последовательности: один конец канатной передачи 6 закреплен на грузоподъемном барабане 10, направляющий блок 12, направляющий блок 13, направляющий блок 12, уравнительный блок 14, направляющий блок 12, направляющий блок 13, направляющий блок 12 и крепится к грузоподъемному барабану 10 другим концом. Направляющие блоки 13 соединены между собой захватом, на который подвешивается груз 15.
Система горизонтальных перемещений груза, представленная на фиг. 2, включает в себя подвижный мост в виде рельсовых направляющих 3, выполненных в виде полых балок прямоугольного сечения, тележку горизонтальных перемещений груза 5 с закрепленными на ней направляющими блоками 12 и роликами 16, которые помещены в пазы рельсовых направляющих 3 подвижного моста.
Система поворота моста вокруг центральной поддерживающей опоры 1, представленная на фиг. 3, включает в себя подвижный мост в виде рельсовых направляющих 3, тележку горизонтальных перемещений груза 5, тележку с роликами 19, перемещающуюся по дополнительным рельсовым направляющим дугообразной формы 18, которые выполнены аналогично рельсовым направляющим 3 подвижного моста системы горизонтальных перемещений груза, отличие заключается в их дугообразной форме.
Конструкция системы вертикальных и горизонтальных перемещений груза, а также системы поворота моста вокруг центральной поддерживающей опоры кранового манипулятора поддерживается центральной поддерживающей опорой 1, несколькими поддерживающими опорами 2 и двумя поддерживающими балками 20. На центральной поддерживающей опоре 1 расположен электромеханический привод, содержащий электрический двигатель 7, редуктор 8, муфту 9, грузоподъемный барабан 10, электромагнитный тормоз 11, и одну сторону подвижного моста в виде рельсовых направляющих 3. Поддерживающие опоры 2 удерживают дополнительные рельсовые направляющие дугообразной формы 18, они в свою очередь поддерживают подвижный мост в виде рельсовых направляющих 3.
Устройство работает следующим образом:
а) Вертикальное перемещение груза. Движение груза 15 в вертикальной плоскости осуществляется при помощи электрического двигателя 7, приводящего в движение грузоподъемный барабан 10 через редуктор 8 и муфту 9, который вращается по часовой и против часовой стрелки в зависимости от подъема или опускания груза, и на который намотана канатная передача 6, соединенная с грузом 15 через захват. Канатная передача 6 при подъеме груза 15 через направляющие и уравнительный блоки 12, 13 и 14 наматывается на грузоподъемный барабан 10, при опускании груза 15 канатная передача разматывается с грузоподъемного барабана 10 и удлиняется. Использование в качестве исполнительного механизма канатных передач упрощает конструкцию манипулятора. Компенсация при этом сил тяжести, различных видов, сил трения и сил инерции от дополнительно присоединенных масс осуществляется при помощи электромеханического привода. Запасовка канатной передачи системы вертикальных перемещений груза в две ветви позволяет уменьшить диаметр каната и минимальный радиус грузоподъемного барабана, а также повысить безопасность от падения груза и перемещать груз строго по вертикали, причем реакции в опорах грузоподъемного барабана распределяются равномерно. Уравнительный блок при подъеме или опускании груза выравнивают длины правой и левой ветвей канатной передачи при ее неравномерной вытяжке. Электромеханический привод системы вертикальных перемещений груза вынесен с конструкции движущихся частей манипулятора на центральную поддерживающую опору, что уменьшает материалоемкость исполнительного механизма и нагрузку на электрический двигатель.
б) Горизонтальное перемещение груза. Движение груза 15 в горизонтальной плоскости осуществляется при помощи тележки горизонтальных перемещений груза 5, которая перемещается по подвижному мосту в виде рельсовых направляющих 3 за счет роликов 16, установленных на тележке горизонтальных перемещений груза 5, которые движутся вдоль пазов рельсовых направляющих 3. Груз 15 соединяется с тележкой горизонтальных перемещений груза 5 при помощи канатной передачи 6, огибающей попарно расположенные четыре направляющих блока 12, закрепленные на тележке горизонтальных перемещений груза 5, и направляющие и уравнительный блоки 13 и 14. В качестве движущей силы используется прикладываемое усилие оператора-рабочего к грузу, которое необходимо для преодоления сил трения между роликами и поверхностью рельсовых направляющих, это позволяет выполнить манипулятор энергоэффективным.
в) Поворот моста вокруг центральной поддерживающей опоры. Движение по дополнительным рельсовым направляющим дугообразной формы 18 груза 15, закрепленного на тележке 5 горизонтальных перемещений груза, осуществляется с помощью поворотного устройства подвижного моста горизонтальных перемещений, расположенного между центральной поддерживающей опорой 1 и рельсовыми направляющими 3 подвижного моста горизонтальных перемещений. Поворот груза осуществляется посредством прикладываемого усилия оператора-рабочего, которое необходимо для преодоления сил трения между роликами тележки с роликами 19 и поверхностью дополнительных рельсовых направляющих дугообразной формы 18, и опорных подшипников поворотного устройства. В качестве движущей силы используется прикладываемое усилие оператора-рабочего к грузу, которое необходимо для преодоления сил трения между роликами и поверхностью рельсовых направляющих, а также опорных подшипников в поворотном устройстве, это позволяет выполнить манипулятор энергоэффективным.
Реферат
Полезная модель относится к подъемно-транспортному машиностроению, а именно к манипуляторам с ручным управлением, предназначенным для механизации работ, связанных с погрузочно-разгрузочными операциями в мелкосерийном производстве. Система перемещений груза с гибкими механическими передачами содержит электромеханический привод механизма вертикального перемещения груза с канатным исполнительным механизмом, систему горизонтальных перемещений груза и систему поворота моста вокруг центральной оси, выполненные при использовании металлических рельсовых направляющих. Технический результат заключается в реализации конструкции манипулятора кранового типа, который осуществляет движение в вертикальной и горизонтальной плоскостях, а также поворот вокруг центральной оси манипулятора. Механизм перемещений груза с гибкими механическими передачами содержит электромеханический привод системы вертикальных перемещений груза, систему горизонтальных перемещений груза и систему поворота моста вокруг центральной оси.
Комментарии