Круговой пространственный сферический манипулятор - RU2758385C1
Код документа: RU2758385C1
Чертежи
Описание
Изобретение относится к машиностроению, в частности к робототехнике, а именно к пространственным манипуляционным механизмам роботов со сферическим движением рабочих органов, и может найти применение в автоматических линиях, сборочных конвейерах, хирургической медицине, обрабатывающих центрах и технологических установках.
Известно устройство (Huda S., Takeda Y., "Dimensional Synthesis of 3-URU Pure Rotational Parallel Mechanism with Respect to Singularity and Workspace", 12th IFToMM World Congress, Besancon (France), June 18-21, 2007, Fig. 1 Kinematic diagram of the 3-URU mechanism), пространственный сферический механизм, содержащий опорное основание, выходное звено с одним рабочим органом, по окружности которого равномерно через 120° расположены 3 параллельные кинематические цепи для кинематической связи выходного звена подвижной платформы с опорным основанием. Каждая из трех указанных параллельных кинематических цепей содержит расположенный на основании приводной вращательный двигатель, начальные и промежуточные вращательные пары, расположенные перпендикулярно между собой, а также перпендикулярно к оси двигателя. Кроме того, оси всех трех двигателей также расположены на опорном основании с пересечением между собой точно в центре декартовой системы координат (аналог).
Недостатками данного устройства являются большие пространственные габариты, сложность конструкции и сборки звеньев механизма с точным взаимоперпендикулярным расположением осей их вращения, который требует применения трех вращательных двигателей для привода всего одного рабочего органа.
За прототип взято устройство по патенту RU 110326 (бюл. №32 от 20.11.2011) в виде кругового пространственного сферического манипулятора, содержащего опорное основание и установленное на нем подвижное исполнительное устройство привода выходного звена платформы с одном рабочим органом посредством установленных вокруг этого звена многозвенных кинематических цепей, каждая из которых включает вращательный двигатель, а также начальную, две промежуточные и конечную кинематические пары, оси которых установлены взаимно перпендикулярно при их сборке как между собой точно в одной точке осями вращения всех трех приводных двигателей для привода только одного рабочего органа (прототип).
Недостатками указанного пространственного сферического манипулятора являются:
1. Сложная конструкция и сборка привода манипулятора, обусловленная применением трех кинематических цепей с взаимно-перпендикулярными осями вращательных кинематических и трех приводных двигателей с пересечением только в одной точке их осей вращения.
2. Большие пространственные габариты, затрудняющие его транспортировку и ограничивающие области его применения, например, для очистки труб и обработки сферических поверхностей.
3. Ограниченное рабочее пространство и узкая функциональность манипулятора, требующая для привода только одного рабочего органа применения трех отдельных приводных двигателей.
4. Сложная система управления одновременно тремя приводными двигателями с пересекающимися осями вращения.
В основе изобретения положена техническая задача, заключающаяся в упрощении конструкции, снижении пространственных габаритов, сферического манипулятора, а также расширении его функциональности и рабочего пространства на основе увеличения числа рабочих органов и уменьшения до одного количества требуемых для их перемещения приводных двигателей.
Получение технического результата достигается за счет того, что предлагаемый круговой пространственный сферический манипулятор содержит опорное основание и установленное на нем подвижное исполнительное устройство привода выходного звена с рабочим органом, выполненное в виде замкнутой кинематической цепи, составленной из радиально изогнутых шарнирных соединительных рычагов, последовательно установленных между собой при их сборке по окружности и кинематически связанных между собой и с приводным ведущим валом посредством цилиндрических шарниров, оси которых пересекаются между собой в центре сферической поверхности для перемещения по ней одновременно нескольких рабочих органов, которые закреплены на указанных радиально изогнутых шарнирных соединительных рычагах и выполнены с одним приводным вращательным двигателем.
Сущность изобретения поясняется чертежами на фиг. 1, фиг. 2, фиг. 3, фиг. 4, фиг. 5, фиг. 6, фиг. 7, фиг. 8 и фиг. 9.
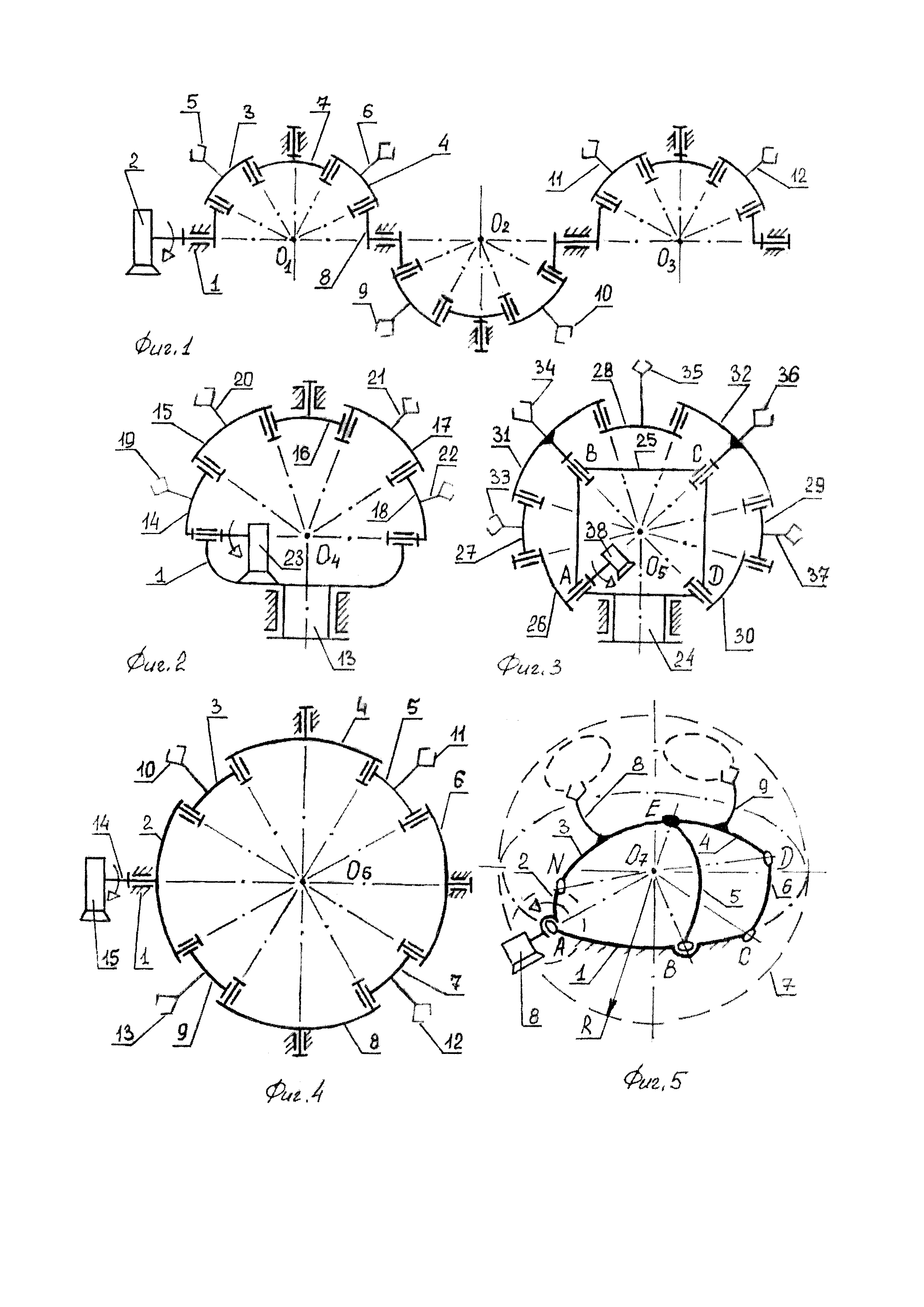
На фиг. 1 изображен общий вид кругового пространственного сферического манипулятора, содержащего опорного основание 1 и установленное на нем подвижное исполнительное устройство с приводным вращательным двигателем 2, которое выполнено в виде замкнутой кинематической цепи, представляющей набор подвижных полукруглых блочных модулей, составленных из двухшарнирных звеньев 3 и 4 с установленными на них рабочими органами 5 и 6 и соединенных между собой и с опорным основанием 1 посредством трехшарнирных звеньев 7 и 8, где замкнутая кинематическая цепь образована чередованием между собой при сборке манипулятора упомянутых двухшарнирных и трехшарнирных звеньев, оси вращения которых пересекаются в общей точке, совпадающей с центрами O1, O2 и O3 каждой из полуокружностей, расположенными на общей прямой «O1 - О2 - O3», совпадающей с осью вращения приводного двигателя 2 для образования сферического манипулятора с шестью рабочими органами 5, 6, 9, 10, 11 и 12.
На фиг. 2 представлен вариант выполнения манипулятора, в котором опорное основание 1 сблокировано с поворотной платформой 13, а подвижное исполнительное устройство выполнено в виде последовательно расположенных по окружности с центром O4 пяти радиально изогнутых двухшарнирных соединительных рычагов 14, 15, 16, 17 и 18, кинематически связанных между собой и с опорным основанием 1 посредством цилиндрических шарниров, оси которых пересекаются в центре O4. Соединительные рычаги 14, 15, 17 и 18 сблокированы с четырьмя рабочими органами 19, 20, 21 и 22, выполненными с вращательным приводом 23.
На фиг. 3 представлен вариант выполнения манипулятора, в котором опорное основание выполнено в виде установленного на поворотной платформе 24 четырехшарнирного звена 25 квадратной формы, на вершинах А, В, С, D которого вдоль его диагоналей АС и BD установлены четыре попарно соосных между собой оси, которые кинематически связаны между собой посредством двухшарнирных звеньев 26, 27, 28, 29, 30 и трехшарнирных звеньев 31 и 32 с попарно пересекающимися осями вращения в общей точке O5, которая расположена на оси вращения поворотной платформы 24 для образования сферического манипулятора с пятью рабочими органами 33, 34, 35, 36, 37 и их вращательными приводом 38.
На фиг. 4 представлен вариант выполнения манипулятора, в котором установленное на опорном основании 1 подвижное исполнительное устройство выполнено в виде замкнутой по окружности с центром O6 кинематической цепи, составленной из последовательно установленных на указанной окружности двухшарнирных звеньев 3, 5, 7 и 9 с расположенными на них рабочими органами 10, 11, 12 и 13 и трехшарнирных звеньев 2, 4, 6 и 8, соединенных между собой и с приводным ведущим валом 14 посредством цилиндрических шарниров, оси которых пересекаются между собой в общей точке, совпадающей с центром O6 упомянутой окружности для образования сферического манипулятора с четырьмя рабочими органами и их вращательным приводом 15.
На фиг. 5 представлен вариант выполнения манипулятора, в котором опорное основание 1 выполнено в виде сферы 7 радиусом R, на наружной поверхности которой установлены три опорных цилиндрических шарнира А, В и С, оси которых пересекаются между собой в центре O7. К одному из упомянутых шарниров А присоединен ведущий кривошип 2, а подвижное исполнительное устройство выполнено в виде шестизвенного двухшатунного сферического механизма, все звенья которого 1, 2, 3, 4, 5 и 6 изогнуты по поверхности упомянутой сферы 7, а оба шатуна 3 и 4 сблокированы с двумя рабочими органами 8 и 9 и кинематически связаны с опорными шарнирами А, В и С через три соединительных двухшарнирных рычага 2, 5 и 6, из которых рычаг 5 соединен с обоими шатунами 3 и 4 через двойной цилиндрический шарнир Е, ось которого также направлена в центр O7 указанной пространственной сферы 7 для образования сферического манипулятора с двумя рабочими органами и их вращательным приводом 8, где опорные шарниры А, В и С расположены на окружности сферы радиусом R, а диаметр указанной окружности D ограничен неравенством D≤2R.
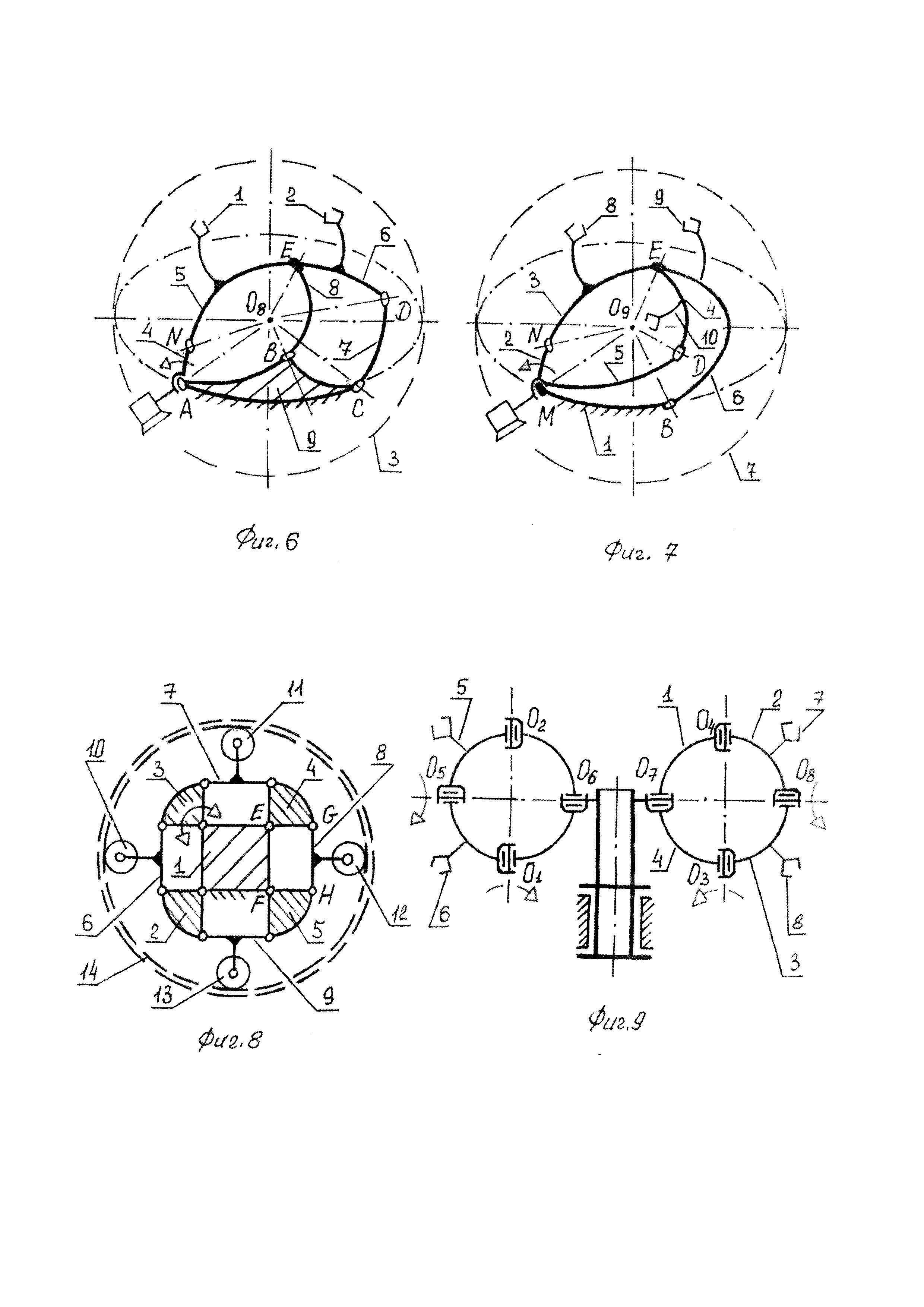
На фиг. 6 представлен вариант выполнения манипулятора, в котором опорные цилиндрические шарниры А, В, С расположены на вершинах сферического треугольника «А - В - С», являющегося частью поверхности сферы радиуса R для образования сферического манипулятора с двумя рабочими органами 1 и 2, выполненного на основе сферического шестизвенного рычажного механизма с изогнутыми вокруг сферы 3 звеньями в виде кривошипа 4, шатунов 5 и 6, коромысел 7 и 8, стойки 9, кинематическая цепь которого содержит один двойной цилиндрический шарнир Е, ось которого проходит через центр сферы O8.
На фиг. 7 представлен вариант выполнения манипулятора с тремя рабочими органами 8, 9 и 10 на основе шестизвенного сферического рычажного механизма, замкнутая двухконтурная кинематическая цепь которого содержит шесть двухшарнирных изогнутых вокруг сферы 7 соединительных рычагов 1, 2, 3, 4, 5, 6 и два двойных цилиндрических шарнира Е и М.
На фиг. 8 представлен вариант выполнения манипулятора на основе кругового параллелограммного механизма, состоящего из стойки 1 и кинематически связанных между собой и со стойкой 1 трехшарнирных звеньев 2, 3, 4, 5 и двухшарнирных шатунов 6, 7, 8, 9 одинаковой длины GH=EF и EG=FH с зажимными роликами 10, 11, 12, 13 для зажима изделия 14.
На фиг. 9 представлен вариант выполнения манипулятора в виде набора связанных через цилиндрические шарниры четырехзвенных сферических механизмов, двухшарнирные звенья 1, 2, 3, 4 которых выполнены в виде гибко-упругих соединительных пластин для образования складывающегося (вокруг пересекающихся осей O1O2 и O3O4 или O5O6 и O7O8) кругового пространственного сферического манипулятора с 4 рабочими органами 5, 6, 7 и 8.
Работа представленного кругового манипулятора заключается в следующем.
Вращение ведущего вала в манипуляторе преобразуется в пространственное движение по сферической поверхности одновременно нескольких рабочих органов, что расширяет рабочее пространство манипулятора, повышает его производительность, упрощает систему управления и расширяет функциональность и области его применения в разных областях техники.
Достигаемый в предлагаемом круговом пространственном сферическом манипуляторе положительный эффект заключается в упрощении конструкции, снижении пространственных габаритов, расширении рабочего пространства и упрощении системы управления за счет привода от одного двигателя нескольких рабочих органов, совершающих сферическое движение в разных рабочих пространствах.
Реферат
Изобретение относится к машиностроению, в частности к робототехнике, а именно к пространственным манипуляционным механизмам роботов со сферическим движением рабочих органов, и может найти применение в автоматических линиях, сборочных конвейерах, хирургической медицине, обрабатывающих центрах и технологических установках. Круговой пространственный сферический манипулятор содержит опорное основание и установленное на нем подвижное исполнительное устройство в виде замкнутой кинематической цепи, составленной из радиально изогнутых шарнирных соединительных рычагов, последовательно установленных между собой при их сборке по окружности и кинематически связанных между собой и с приводным ведущим валом посредством цилиндрических шарниров. Оси шарниров пересекаются в центре сферической поверхности для перемещения по ней одновременно нескольких рабочих органов, которые закреплены на указанных радиально изогнутых рычагах. Технический результат заключается в упрощении конструкции, снижении пространственных габаритов, расширении рабочего пространства и упрощении системы управления за счет привода от одного двигателя нескольких рабочих органов, совершающих сферическое движение в разных рабочих пространствах. 9 ил.
Комментарии