Симметричный платформенный манипулятор с тремя степенями свободы - RU2776578C1
Код документа: RU2776578C1
Чертежи


Описание
Изобретение относится к машиностроению, и в частности к платформенным механизмам параллельной структуры, и может найти применение в обрабатывающих центрах, роботах-манипуляторах и автоматических линиях в разных областях техники и хирургической медицине.
Известен платформенный манипулятор, содержащий опорное основание и подвижную платформу, кинематически связанные между собой через многозвенное шарнирное устройство в виде шести приводных стержневых опор (книга Вульфсон И.И. и др. «Механика машин», Москва: Высшая школа, 1996, с. 28, рис. 1.20, схема платформенного манипулятора Стюарта) - аналог.
Недостатками известного платформенного манипулятора являются сложность конструкции и системы управления из-за применения 12 сложных сферических шарниров и необходимости управления одновременно 6 приводными двигателями.
Наиболее близким к предлагаемому изобретению является платформенный манипулятор с тремя степенями свободы, содержащий опорное основание и шарнирно-рычажное устройство его связи с подвижной платформой в виде шарнирно-сочлененных приводных стержневых опор (статья Мирзаев Р.А. и др., Исследование кинематически манипулятора параллельной структуры (дельта-механизм)// Вестник Сибирского госуд. аэрокосм, ун-та. 2012. Вып. 4, с. 46-50, рис. 1 и рис. 4) - прототип.
Недостатками указанного платформенного манипулятора являются:
1. Сложность конструкции и ее сборки из-за применения 6 сложных в изготовлении сферических шарниров.
2. Узкая рабочая зона, уменьшающаяся до нуля в форме усеченного конуса (рис. 4 в указанной статье Мирзаева. Р.А.) из-за ограниченного угла поворота сферических шарниров и возникающих неуправляемых мертвых положений подвижной платформы из-за имеющихся зазоров в кинематических парах (статья Пожбелко В.И. Возникновение переменной (изменяемой) структуры и расчет размеров области особых положений механизма с учетом зазоров и вырождения кинематических пар // Журнал «Теория механизмов и машин», СПб: Изд-во СПбГПУ, 2010, т. 8(№2), с. 71-80).
3. Низкая эксплуатационная эффективность и функциональность из-за возникающего при движении углового поворота подвижной платформы с рабочим органом, нарушающего заданное расположение рабочего органа при его движении в рабочем пространстве манипулятора.
4. Сложная система управления одновременно всеми приводными двигателями из-за взаимовлияния степеней свободы и возникающей из-за этого связности разных движений подвижной платформы.
В основу изобретения положена техническая задача, заключающаяся в упрощении конструкции и сборки манипулятора, расширении его рабочей зоны и функциональности, а также точного обеспечения заданной постоянной ориентации рабочего органа при его перемещении.
Получение технического результата достигается за счет того, что установленное в платформенном манипуляторе шарнирно-рычажное устройство перемещения выходного звена выполнено в виде набора равномерно расположенных по периметру подвижной платформы с рабочим органом трех структурных модулей, каждый из которых составлен из одного трехшарнирного соединительного рычага и присоединенных к нему трех двухшарнирных соединительных рычагов, кинематически связанных между собой посредством цилиндрических рычагов с параллельными осями вращения для сборки замкнутой многоконтурной кинематической цепи манипулятора.
Сущность изобретения поясняется чертежами на фиг. 1, фиг. 2, фиг. 3, фиг. 4, фиг. 5, фиг. 6, фиг. 7, фиг. 8 и фиг. 9.
На фиг. 1 изображен общий вид симметричного платформенного манипулятора с тремя степенями свободы, содержащего опорное основание 1, кинематически связанное с подвижной платформой 2 посредством шарнирно-рычажного устройства, которое выполнено в виде набора равномерно расположенных по периметру подвижной платформы 2 трех структурных модулей O1ABCJ1O2, O3ABCJ2O4 и O5ABCJ3O6, каждый из которых составлен из одного трехшарнирного рычага 3 с вершинами А, В, С и присоединенных к этим вершинам трех двухшарнирных звеньев 4, 5 и 6, кинематически связанных между собой посредством цилиндрических шарниров с параллельными осями вращения для сборки замкнутой кинематической цепи манипулятора. Подвижная платформа 2 выполнена в виде равностороннего трехшарнирного треугольника с возможностью закрепления на нем подвижного рабочего органа. Структурные модули O1ABCO2, O3ABCO4 и O5ABCO с одной стороны кинематически связаны с вершинами J1, J2 и J3 треугольной подвижной платформы 2, а с другой стороны связаны с опорным основанием 1 посредством трех шарнирных параллелограммов O1ACO2, O3ACO4 и O5ACO6 с приводными вращательными кинематическими парами O1, O3 и O5 соответственно.
На фиг. 2 представлен вариант выполнения платформенного манипулятора, в котором все двухшарнирные соединительные рычаги (например, O1A, BJ1 и J3B, AO5 и другие) выполнены в виде пластин с отогнутыми обоими концами, которые расположены параллельно между собой для соединения с соответствующим шарниром.
На фиг. 3 представлен вариант выполнения платформенного манипулятора, в котором каждый из трех структурных модулей O1ABCJ1O2, O3ABCJ2O4 и O5ABCJ3O6 выполнен в виде последовательной сборки с подвижной платформой 2 одного двухшарнирного соединительного рычага BJ2,одного трехшарнирного соединительного рычага ABC, двух двухшарнирных соединительных рычагов O1A и O2C одинаковой длины O1A=O2C, которые образуют между собой и с опорным основанием 1 шарнирные параллелограммы соответственно O1ACO2, O3ACO4 и O5ACO6 с установленной в каждом из них по диагонали приводной поступательной кинематической парой Е, выполненной в виде подвижного пневмоцилиндра или гидроцилиндра 7.
На фиг. 4 представлен вариант выполнения платформенного манипулятора, в котором каждый из трех структурных модулей O1ABCJ1O2, O3ABCJ2O4 и O5ABCJ3O6 выполнен в виде последовательной сборки с подвижной платформой 2 трехшарнирного соединительного рычага ABG1 и трех двухшарнирных соединительных рычагов O1A, BC и CO2, образующих между собой и с опорным основанием 1 шарнирный пятизвенник O1ABCO2 с установленной на опорном основании 1 приводной вращательной кинематической парой O1.
На фиг. 5 представлен вариант выполнения платформенного манипулятора, в котором каждый из трех структурных модулей O1CAJ1BO2 образует с опорным основанием 1 шарнирный пятизвенник O1CABO2 с приводной поступательной кинематической парой С, выполненной в виде установленного на опорном основании 1 поворотного пневмоцилиндра или гидроцилиндра 8.
На фиг. 6 представлен вариант выполнения платформенного манипулятора, в котором каждый из трех структурных модулей O1ABCJ1O2, O3ABCJ2O4 и O5ABCJ3O6 выполнен в виде последовательной сборки с подвижной платформой 2 двухшарнирного соединительного рычага BJ1, затем трехшарнирного соединительного рычага ABC с присоединенными к нему двумя скрещивающимися между собой двухшарнирными соединительными рычагами O1А и О2С одинаковой длины O1А=О2С, которые образуют шарнирный антипараллелограмм O1ACO2 с установленной на опорном основании 6 вращательной приводной кинематической парой O1.
На фиг. 7 представлен вариант выполнения платформенного манипулятора, в котором каждый из трех структурных модулей O1ABCJ1O2,O3ABCJ2O4 и O5ABCJ3O6 содержит антипараллелограмм О1САO2 со скрещивающимися между собой двухшарнирными соединительными рычагами O1A и O2C одинаковой длины O1A=O2C, между которыми установлена поступательная приводная кинематическая пара Е, выполненная в виде поворотного относительно опорного основания 1 пневмоцилиндра или гидроцилиндра 9.
На фиг. 8 представлен вариант выполнения платформенного манипулятора, в котором трехшарнирный соединительный рычаг выполнен в виде радиально изогнутого упругого трехшарнирного звена ABС для образования при сборке замкнутой кинематической цепи манипулятора полного набора цилиндрических шарниров с беззазорными вращательными кинематическими парами и исключения при работе шарнирного манипулятора неуправляемых мертвых положений подвижной платформы 2 с установленным на ней рабочим органом.
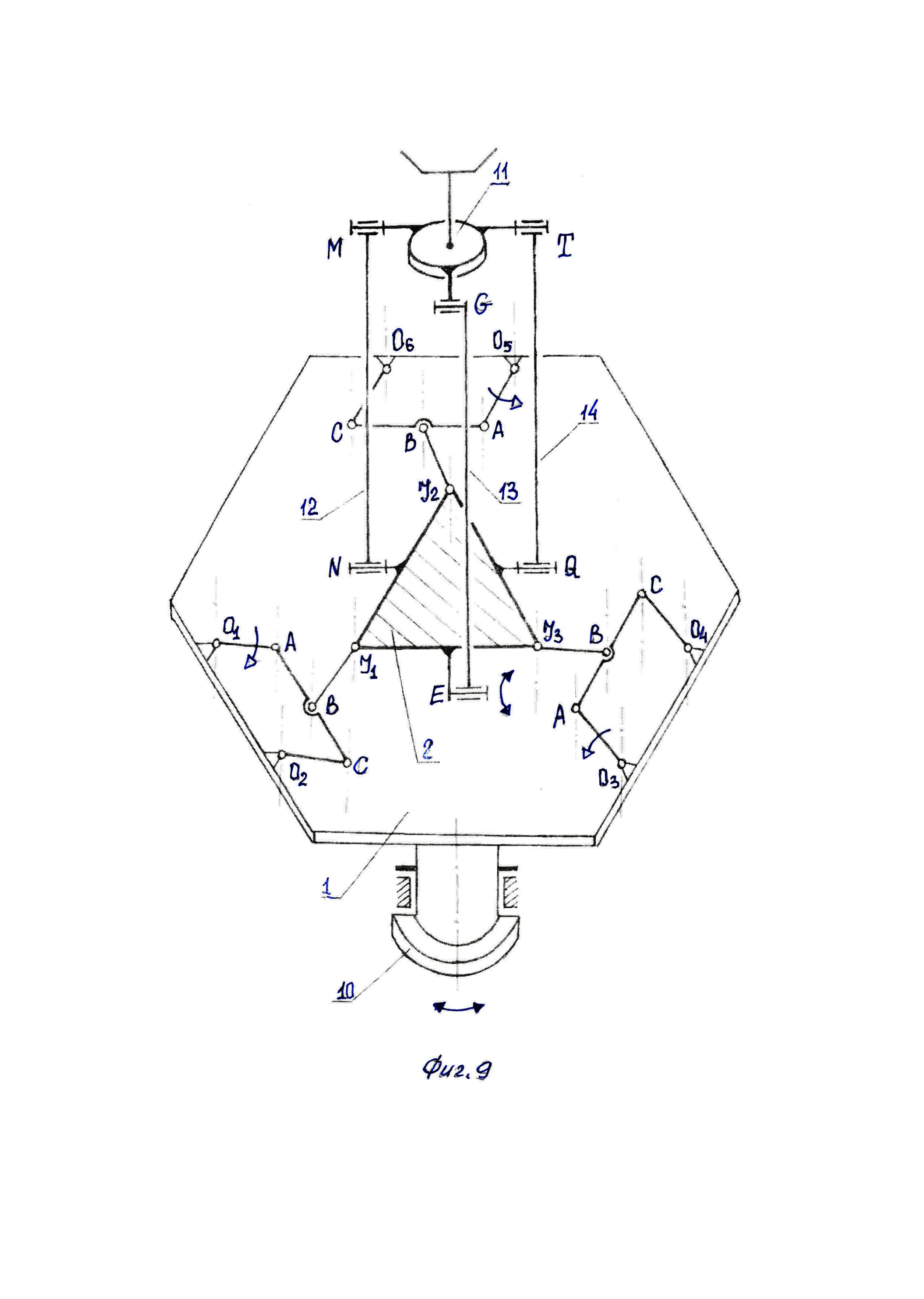
На фиг. 9 представлен вариант выполнения платформенного манипулятора, который снабжен поворотной платформой 10, выполненной с возможностью осуществления реверсивного поворота вокруг вертикальной оси, а опорное основание 1 установлено на упомянутой поворотной платформе 10. Рабочий орган 11 кинематически связан с подвижной платформой 2 манипулятора посредством трех параллельных кривошипов 12, 13 и 14, выполненных одинаковой длины NM=EG=QT, установленных с возможностью осуществления реверсивного поворота вокруг горизонтальной оси для совершения кругового поступательного движения рабочего органа 11 при сохранении его заданной горизонтальной ориентации. При этом трехшарнирный соединительный рычаг ABC в каждом из структурных модулей O1ABCJ1O2, O3ABCJ2O4 и O5ABCJ3O6 выполнен с расположением всех его трех шарниров А, В и С на одной прямой линии «А - В - С» параллельно плоскости опорного основания 1, для образования пространственного шестиопорного (через шарниры О1, O2, O3, O4, O5, O6) платформенного манипулятора с точным позиционированием рабочего органа 11 во всем пространстве его движений с числом степеней свободы, равным W=5.
Работа представленного платформенного манипулятора заключается в следующем.
Указанные на фиг. 1 - фиг. 9 в разных вариантах выполнения платформенного манипулятора вращательные или поступательные приводные кинематические пары обеспечивают перемещение подвижной платформы в пространстве с тремя степенями свободы, а предлагаемая в варианте на фиг. 9 установка опорного основания на поворотную платформу в сочетании с кинематической связью рабочего органа с подвижной платформой через три параллельных кривошипа позволяют дополнительно увеличить до пяти число степеней свободы рабочего органа.
Достигаемый в предлагаемом манипуляторе положительный эффект заключается в упрощении конструкции и ее сборки, расширении рабочего пространства и упрощении системы управления за счет раздельной кинематики всех его движений.
Реферат
Изобретение относится к машиностроению, в частности к платформенным механизмам параллельной структуры. Манипулятор содержит опорное основание, кинематически связанное посредством шарнирно-рычажного устройства с подвижной платформой, взаимодействующей с рабочим органом. Шарнино-рычажное устройство выполнено в виде набора равномерно расположенных по периметру подвижной платформы трех структурных модулей, каждый из которых составлен из одного трехшарнирного соединительного рычага и присоединенных к нему трех двухшарнирных соединительных рычагов, кинематически связанных между собой посредством цилиндрических шарниров с параллельными осями вращения для сборки замкнутой многоконтурной кинематической цепи манипулятора. Каждый из упомянутых структурных модулей выполнен в виде последовательной сборки с подвижной платформой одного трехшарнирного соединительного рычага и трех двухшарнирных соединительных рычагов, которые образуют между собой и с опорным основанием шарнирный параллелограмм, или шарнирный антипараллелограмм, или шарнирный пятизвенник с приводной вращательной или поступательной кинематической парой. Изобретение обеспечивает упрощение конструкции, расширение рабочего пространства, а также упрощении системы управления рабочим органом за счет раздельной кинематики всех его движений. 4 з.п. ф-лы, 9 ил.
Формула
Документы, цитированные в отчёте о поиске
Пространственный платформенный vip-манипулятор
Комментарии