Передвижная роботизированная модифицируемая кровать - RU2636912C1
Код документа: RU2636912C1
Чертежи
Описание
Область техники
Изобретение относится к передвижному универсальному роботизированному устройству позиционирования, предназначенному, в частности, для иммобильных пациентов, функциональность которого позволяет получить большое число регулируемых положений, высокую маневренность и вариативность с точки зрения возможностей ухода и пользования.
Предыдущий уровень техники
В настоящее время существует целый ряд приспособлений для транспортировки и размещения, разработанных специально для иммобильных пациентов и людей с ограниченными возможностями движения. Однако общая концепция и конструкция этих систем направлены, прежде всего, на решение их конкретных прикладных задач, поэтому они недостаточно универсальны. Как правило, речь в таких случаях идет о креслах-каталках, не имеющих возможности изменять положение человека, либо о приспособлениях или устройствах, которые, хотя и позволяют регулировать положение с переводом в горизонтальную плоскость и, таким образом, получать горизонтальную поверхность, на которой можно лежать, но это возможно лишь в строго определенном месте, в частности в зоне, проходящей по периметру рамы, частично относящейся к ложу кровати.
Ближайшие аналоги предлагаемого технического решения описаны в следующих заявках на изобретение: US 2012/016093 А1 от 05.06.2012 г., ЕР 2581072 А1 от 17.04.2013 г., ЕР 2583650 А1 от 24.04.2013 г., ЕР 2583651 А1 24.04.2013 г.
Однако в основу всех упомянутых выше изобретений положен принцип, согласно которому кресло выдвигается из базовой конструкции. Тем не менее, такие складные конструкции, объединяющие в себе кровать и кресло-каталку, не предусматривают возможность регулирования по высоте ни кровати, ни системы сидения, а также не позволяют получить стандартные размеры кровати.
В варианте, когда отдельная часть базовой конструкции кровати выдвигается в виде кресла-каталки, эта базовая конструкция все равно продолжает стоять в помещении, загромождая его. Еще один недостаток заключается в самом ложе, которое выполнено составным прямо посередине и по всей длине. Поэтому матрас или обивка оказываются разделенными всегда как раз в том месте, где лежит человек.
К тому же предлагаемые технические решения не предусматривают управления роботизированными элементами, в результате чего, при изменении положения с сидячего на лежачее или наоборот автоматически изменяется и межосевое расстояние между передней и задней осью, что приводит к автоматическому укорачиванию или удлинению подвижной базы кресла и, как следствие, к необходимости изменять положение с учетом конкретных требований к устойчивости всего приспособления в данный момент.
Ширина существующих на сегодняшний день устройств - кресел-каталок - в целом является постоянной, возможности изменения ширины ложа, когда в положении лежа ширину кровати увеличивают, а для положения сидя снова соответственно уменьшают, чтобы, таким образом, с одной стороны, получить комфортную кровать, а с другой - обеспечить возможность удобного проезда через узкие места, например двери, не предусмотрено.
Сущность изобретения
Перечисленные недостатки в значительной мере устраняются в предлагаемой передвижной роботизированной модифицируемой кровати, в которой всенаправленная ходовая часть встроена в центральную раму, в верхней части которой находятся четыре линейных направляющих ходовой части, причем на каждой паре этих линейных направляющих в направлении вперед-назад подвешена (выдвижная) телескопическая рама, а на каждой из них на опорах посредством сайлентблоков (резинометаллических упругих элементов) установлена неподвижная ось, состоящая из соединительной части и колес Илона (Mecanum), причем в этой соединительной части на опорах установлены приводы этих колес Илона; при этом передняя и задняя телескопические рамы соединены с линейным приводом выдвижной секции ходовой части, а оба крайних положения обеих выдвижных телескопических рам ограничиваются упорами выдвижных телескопических рам; причем в выдвижные телескопические рамы встроены блоки управления приводами вращения колес; кроме того, в продольной оси центральной рамы, в ее нижней части, находится зарядное устройство для батарей, а по его сторонам расположены батареи; к тому же, передвижная всенаправленная ходовая часть по своему периметру снабжена амортизирующими элементами, причем боковые амортизирующие элементы жестко закреплены на центральной раме, а проходящие по периметру амортизирующие элементы в направлении вперед-назад являются частью выдвижной телескопической рамы; причем передвижная всенаправленная ходовая часть снабжена раздельной в продольном и осевом направлении и закрепленной на центральной раме центральной обшивкой, а также закрепленными на телескопической раме сегментами передней обшивки; при этом в осевой и нижней части центральной рамы находится стыковая поверхность с элементами, предназначенная для присоединения к функциональной конструкции требуемого типа передвижной всенаправленной ходовой части.
Перечисленные недостатки также в значительной мере устраняются в заявляемой передвижной роботизированной модифицируемой кровати, состоящей из передвижной всенаправленной ходовой части и модифицируемого ложа, оснащенного системой позиционирования, позволяющей осуществлять его управляемую настройку и/или регулировку на основе следующего принципа: модифицируемая несущая поверхность состоит из основных секций, включающих поперечные секции и одновременно дробные секции сборочных узлов рамы, а именно головную секцию, спинную секцию, тазовую секцию, бедренную секцию, ножную секцию и стопную секцию, причем каждая из этих секций состоит из одной центральной части и двух боковых частей, при этом все центральные части в продольном направлении образуют дробную центральную секцию, а все боковые части - две продольные боковые секции, в то время как тазовая секция состоит только из центральной части, причем примыкающие друг к другу центральная и боковые части соединены друг с другом соосно с возможностью поворота, при этом позиционирование соответствующих противоположных боковых частей и блокировка боковых частей в ровном положении осуществляются с помощью соответствующих приводов боковых частей, причем позиционирование каждого отдельного сегмента центральной секции осуществляется посредством линейных приводов центральной секции, при этом с тазовой секцией по основной центральной оси модифицируемой несущей поверхности жестко соединена вставка несущей поверхности, соединенная с вставкой стоек посредством линейных направляющих выдвижной секции, при этом между модифицируемой несущей поверхностью и передвижной всенаправленной ходовой частью находится узел сопряжения, присоединительные элементы которого входят в зацепление со стыковой поверхностью передвижной всенаправленной ходовой части.
Еще одно преимущество состоит в том, что центральные части и боковые части соединены соосно и с возможностью поворота со смещенными шарнирами, которые жестко соединены с соответствующими частями, а противоположные части связаны в осевом направлении посредством оси шарнира.
Еще одно преимущество заключается в том, что боковые части бедренной секции входят в состав боковых частей, которые в верхнем положении одновременно служат опорой для рук.
Кроме того, дополнительное преимущество заключается в том, что позиционирование противоположных боковых частей происходит с помощью соответствующего привода боковых частей и, в частности, посредством тросов Боудена линейного привода через поворотный ролик, причем трос Боудена линейного привода проходит через эксцентрический паз боковой части и закреплен в ней концевым элементом троса Боудена, причем каждая из боковых частей в ровном положении фиксируется одним или двумя коническими соединениями, также управляемыми посредством соответствующего привода боковой части, причем такое коническое соединение находится рядом с осью шарнира; в одном из смещенных шарниров установлена коническая втулка, в которую входит выдвижной конус, вставленный в скользящие опоры второго, противоположного, смещенного шарнира и выдвигаемый пружиной конуса, причем выдвижной конус посредством кулисы соединен с рабочей тягой, управляемой поворотным рычагом, при этом кулиса содержит направляющий стержень и проходит в теле направляющего элемента, связанного рычагом с подвижной втулкой, а другая часть привода боковых частей представляет собой ходовой винт для перемещения влево/вправо, установленный в центральной части блока фиксации в комбинированном радиально-осевом подшипнике и радиальном подшипнике; этот находящийся между подшипниками ходовой винт для перемещения влево/вправо приводится вращательным приводом через одноступенчатую передачу, также соединенную фланцем с блоком фиксации, причем в каждое из противоположных резьбовых отверстий вкручен ходовой винт с соответствующей резьбой, причем каждый из них установлен в подвижной втулке, а каждая подвижная втулка сбоку жестко соединена фасонным ползуном, установленным в соответствующей направляющей, а передняя часть подвижной втулки жестко связана с подвижной втулкой, заканчиваясь в жестко связанном с ней буртике, причем в этом узле установлена скользящая втулка с замыкающим двойным буртиком, между первым и вторым буртиком вложена пружина растяжения, причем ко второму буртику подвижной втулки с замыкающим двойным буртиком прилегает буртик винта, в который вкручен установочный винт, причем за этот винт в осевом направлении закреплен конец троса Боудена линейного привода, фиксируемый двумя нажимными винтами, причем обратное движение боковых частей обеспечивают тросы Боудена боковых частей, при этом каждая из пружин вставлена в направляющую трубку и сжимается направляющей головкой с буртиком, на который опирается установочная гайка с установочным винтом, за который по оси закреплен конец троса Боудена боковой части, фиксируемый нажимными винтами.
Еще одно преимущество заключается в том, что вставка стоек жестко соединена с головками выдвижных телескопических стоек, причем во вставку стоек встроен вращательный привод для выдвижения несущей поверхности, входящей в геометрическое зацепление с фасонной гребенкой, являющейся частью вставки несущей поверхности. С противоположной стороны выдвижных телескопических стоек находятся их ножки и их соединительные элементы, предназначенные для соединения со стыковой поверхностью передвижной всенаправленной ходовой части.
Еще одно преимущество заключается в том, что поверхность всех частей модифицируемой несущей поверхности снабжена мягкой обивкой, усиленной по внешним краям и выполненной под небольшим уклоном к центральной зоне ложа. Центральные части в замыкающей зоне головной секции расположены под углом к середине модифицируемой несущей поверхности.
Еще одно преимущество заключается в том, что на модифицируемой несущей поверхности размещен вставной кронштейн для блока управления.
Еще одно преимущество заключается в том, что блок управления размещен в области опоры для рук в боковой части бедренной секции.
Еще одно преимущество заключается в том, что блок управления размещен на откидной панели, находящейся с задней стороны центральной части головной секции.
Таким образом, предложено универсальное устройство роботизированного типа, которое можно применять как для транспортировки, так и в процессе лечения и реабилитации иммобильных и ограниченных в подвижности пациентов. Его конструкция подобрана таким образом, чтобы в разных изменяемых положениях оно отвечало потребностям пользователей с ограниченными возможностями и его можно было использовать в положении лежа, а при помощи отдельных роботизированных управляемых секций модифицируемой несущей поверхности и специальных элементов конструкции - и в положении сидя.
Значимым преимуществом системы является ее универсальность с разнообразными возможностями использования для иммобильных пациентов, причем она снабжена системой позиционирования, позволяющей быстро изменять положение с сидячего на лежачее. Сложная электронная система позволяет в полностью автоматизированном режиме трансформировать устройство, превращая его по мере необходимости в кровать или кресло-каталку либо кресло всего за несколько секунд. Также возможно постепенное позиционирование из положения сидя в положение лежа. Большое число всех возможных позиций модифицируемой несущей поверхности с плавным переходом между обоими крайними положениями, т.е. положением сидя, в котором передвижная роботизированная модифицируемая кровать имеет форму кресла, и горизонтальным положением, достигается за счет поперечного и продольного секционирования.
В то же время устройство подходит и для выполнения эффективных лечебных и реабилитационных процессов - за счет настройки углового движения отдельных модулей, включая настройку нужной скорости этого постепенного движения в запланированной последовательности и сочетаниях. Дополнительным преимуществом является также вариативность управления с использованием ручного или дистанционного режимов, а также с возможностью применения системы автоматизированных движений.
Преимущества устройства:
1) Функционально устройство объединяет две системы, в аналогах представляющие собой отдельные устройства - модифицируемое кресло-каталку и стыковочный узел - в одном компактном агрегате с изменяемыми размерами (в результате чего отпадает необходимость в использовании громоздких и неудобных в обращении стыковочных узлов).
2) Устройство позволяет осуществлять позиционирование пользователя по высоте в пределах большого диапазона, что обеспечивает комфорт в эксплуатации. Позиционирование верхней части роботизированной и модифицируемой кровати по высоте осуществляется с помощью выдвижных телескопических стоек с электроприводами, обеспечивающими возможность трансформации устройства в «кровать» для положения лежа, а также в «кресло» для положения сидя. Кроме того, благодаря возможности изменения высоты пользователю легче садиться / ложиться и вставать с устройства в обоих альтернативных положениях.
3) В устройстве нет разделения по центральной продольной оси. Кроме того, в нем подобрано идеальное соотношение ширины в разных модификациях. Горизонтальное ложе не слишком большое, т.е. в формате кресла оно удобно проходит в дверной проем, но исключительно комфортное, когда пользователь находится в положении лежа. (Ложе некоторых предлагаемых в настоящее время на рынке устройств в разложенном состоянии бывает разделено прямо посередине. Поэтому матрас или обивка также всегда оказываются разделены прямо в том месте, где лежит пользователь. Этот недостаток устранен в передвижной модифицируемой кровати, т.к. основная зона для лежания поделена на несколько отдельных секций только поперек. Продольное деление имеет место только в зоне боковых частей. Хотя устройство является единым, без стыковочного узла, общие размеры ложа исключительно комфортны).
4) Дополнительным преимуществом с точки зрения повышения устойчивости модифицируемого горизонтального ложа оказалась возможность увеличения межосевого расстояния его выдвижной секции (поэтому требуемая устойчивость обеспечивается, несмотря на отсутствие стыковочного узла).
5) Дополнительное преимущество обеспечивает применение колес Илона, позволяющим уменьшить число приводов без отрицательных последствий для маневренности устройства (приводы вращения колес не нужны).
В горизонтальном положении кровать отличается наличием центрального модуля в виде отдельных секций, а также боковых модулей, которые связаны с роботизированными элементами и приводами таким образом, что благодаря этим несущим поверхностям на них удобно лежать; если система управления переводит кровать в положение сидя «кресло», боковые модули складываются в требуемые положения; прилегающие к центральной сидячей части кровати боковые модули переводятся в вертикальное положение и таким образом служат опорами для рук; модуль спины и модуль для ног устанавливаются под таким углом, что достигается оптимальное положение сидячей секции кресла; управляемое с помощью робота расстояние между передней и задней осью уменьшается до оптимальной величины, подходящей для перемещения кресла в помещении, а с помощью управляющего джойстика, или с помощью пульта дистанционного управления, или управляющего запоминающего устройства пользователь, используя систему навигации, может перемещать устройство в нужное место даже в помещениях с ограниченной площадью.
Перечень фигур на чертежах
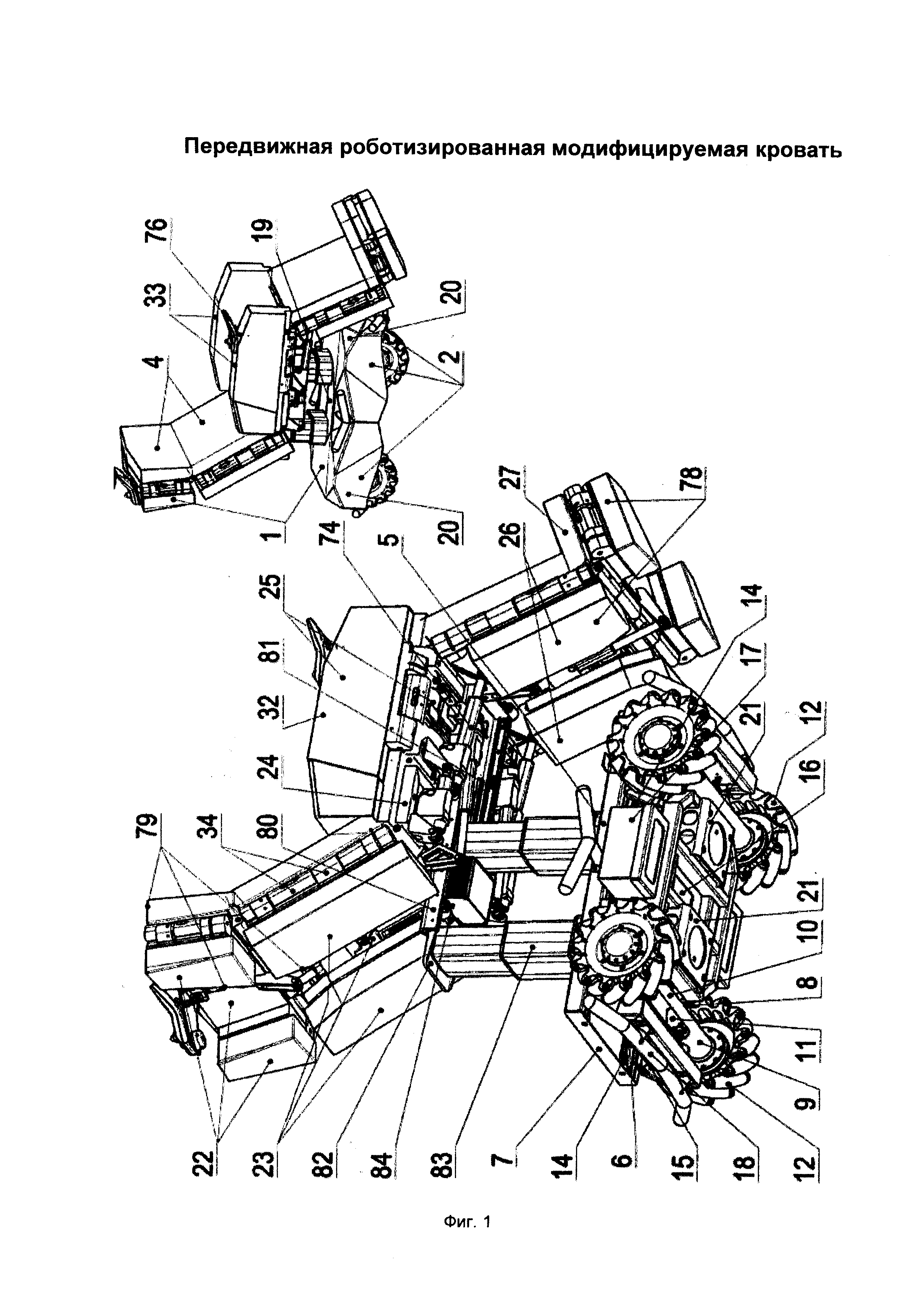
На фиг. 1 к реферату изображен общий вид в аксонометрической проекции передвижной и модифицируемой кровати без защитной обшивки ходовой части, а также изображение определенных фрагментов вида снизу. В правом верхнем углу находится общий вид модифицируемой несущей поверхности в форме кресла.
Фиг. 1 - Общий вид в аксонометрической проекции передвижной роботизированной модифицируемой кровати без защитной обшивки ходовой части, где также можно увидеть определенные выноски из вида снизу. В правом верхнем углу находится общий вид модифицируемой несущей поверхности в форме кресла/кресла-каталки.
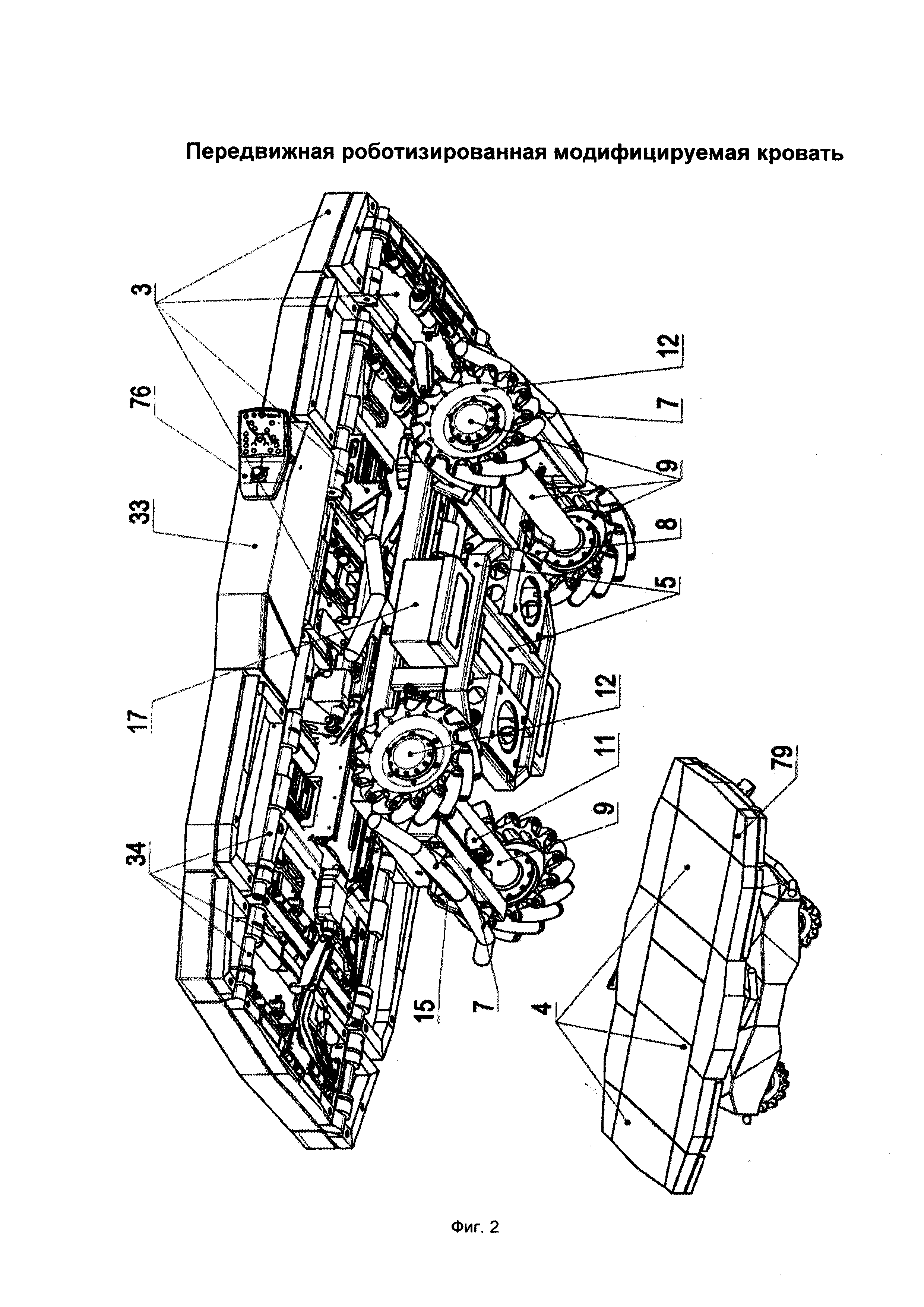
Фиг. 2 - Общий вид в аксонометрической проекции передвижной роботизированной модифицируемой кровати в виде горизонтального ложа, без защитной обшивки ходовой части, где также изображены определенные детали I системы позиционирования, включая ходовую часть. В левом нижнем углу изображен общий вид модифицируемой несущей поверхности в форме горизонтального ложа в крайнем нижнем стабилизированном положении с максимальным расстоянием между осями колес.
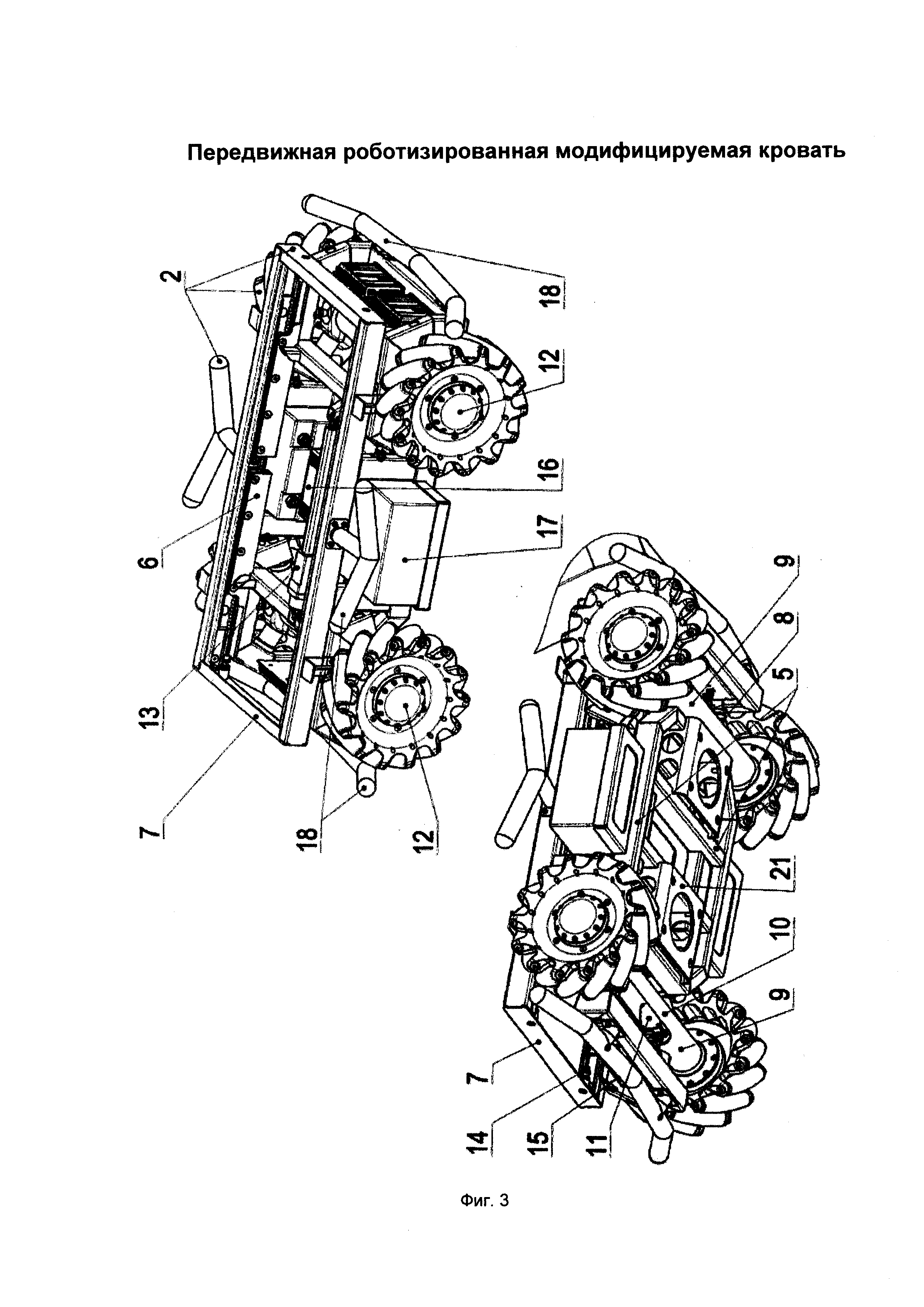
Фиг. 3 - Детальное представление ходовой части в аксонометрии, без обшивки, с амортизирующими элементами по периметру и с минимальным расстоянием между осями колес.
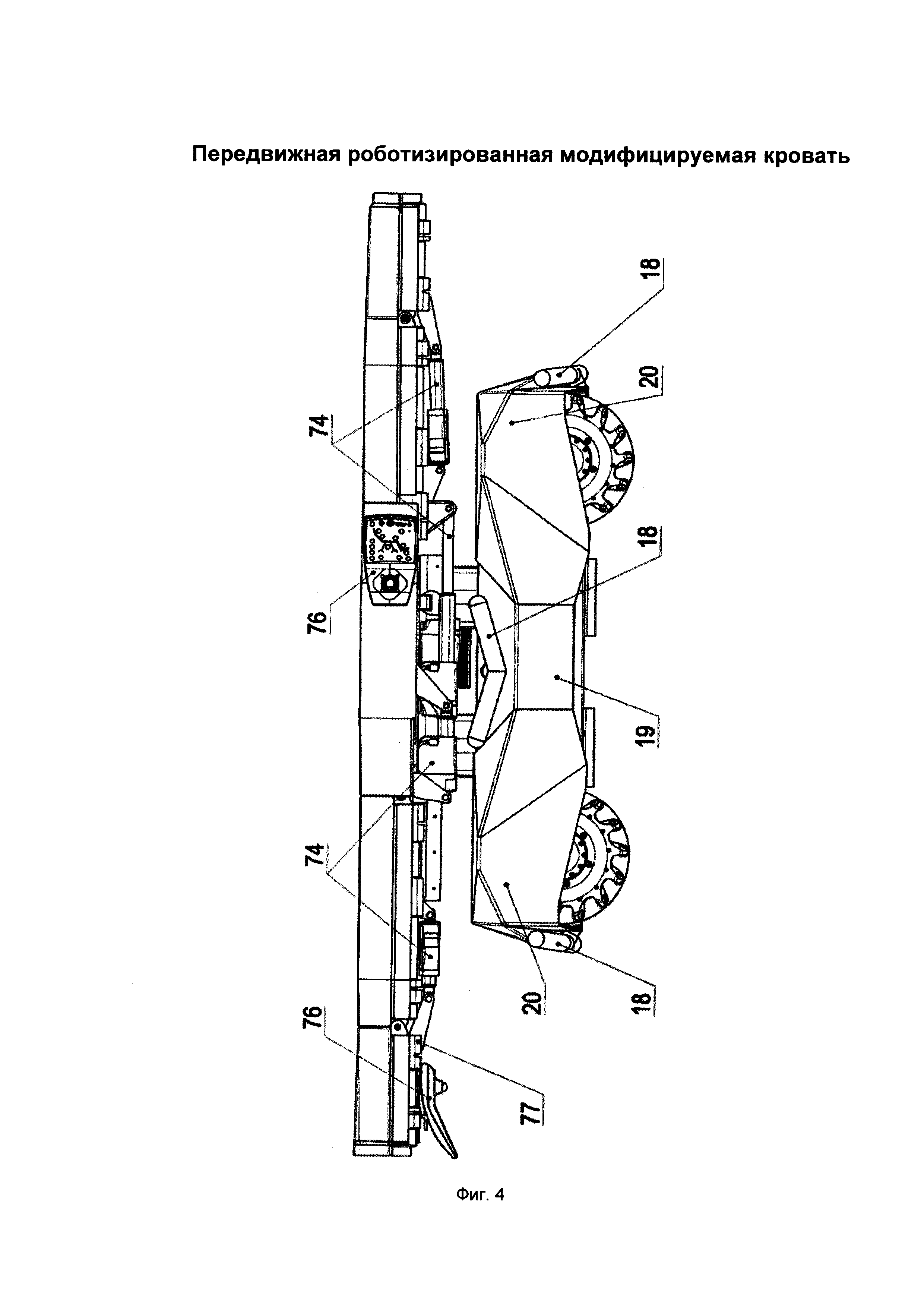
Фиг. 4 - Общий вид роботизированной, передвижной модифицируемой кровати - вид сбоку. Передвижная роботизированная модифицируемая кровать в виде горизонтального ложа в крайнем нижнем стабилизированном положении с максимальным расстоянием между осями колес.
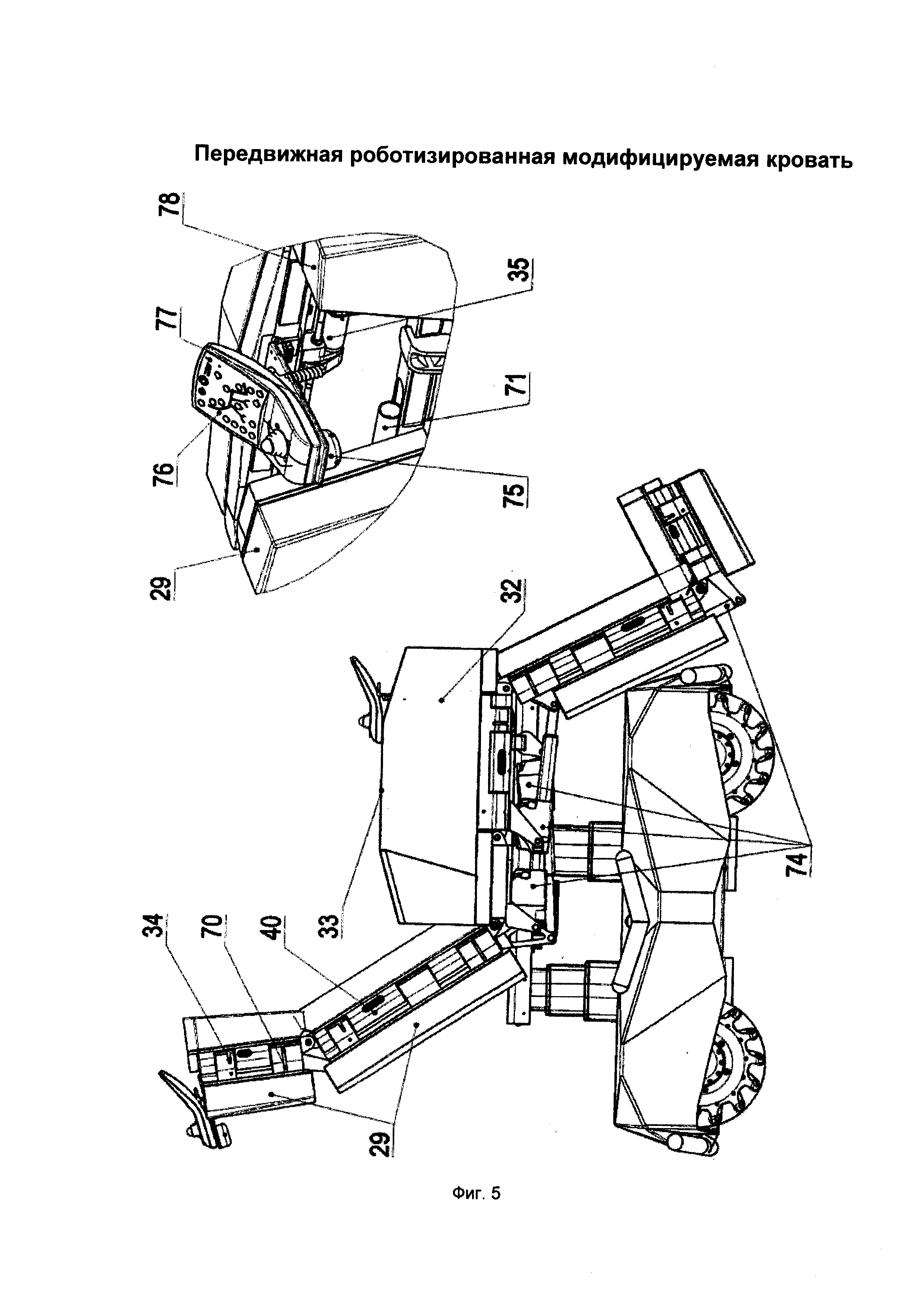
Фиг. 5 - Общий вид передвижной роботизированной модифицируемой кровати в аксонометрической проекции с защитной обшивкой ходовой части, с модифицируемой несущей поверхностью в форме кресла и блоком управления на опоре для рук. В углу приводится выноска с изображением блока управления, закрепленного на поворотной и откидной панели.
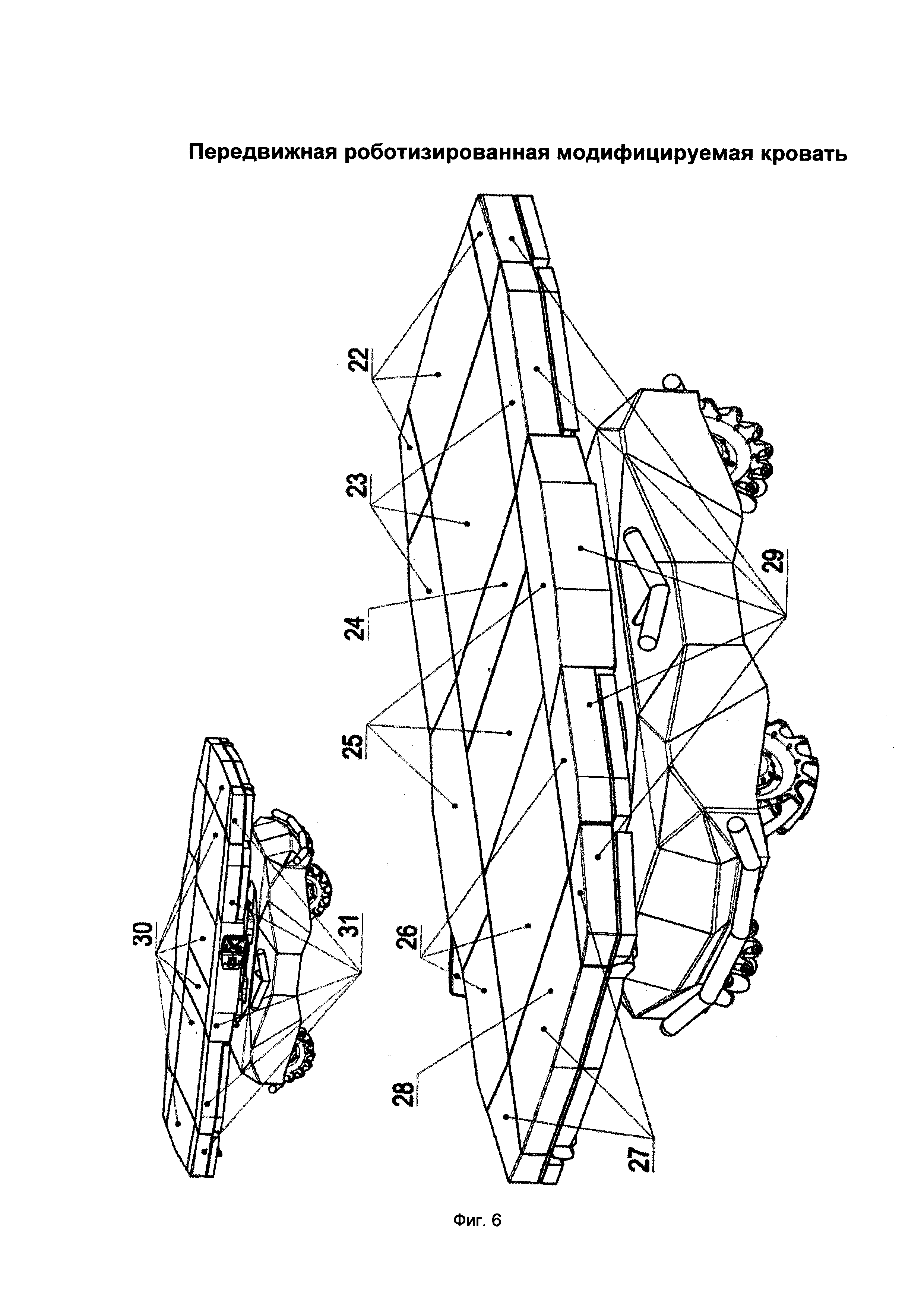
Фиг. 6 - Общий вид передвижной роботизированной модифицируемой кровати в аксонометрической проекции. Передвижная роботизированная модифицируемая кровать в виде горизонтального ложа в крайнем нижнем стабилизированном положении с максимальным расстоянием между осями колес.
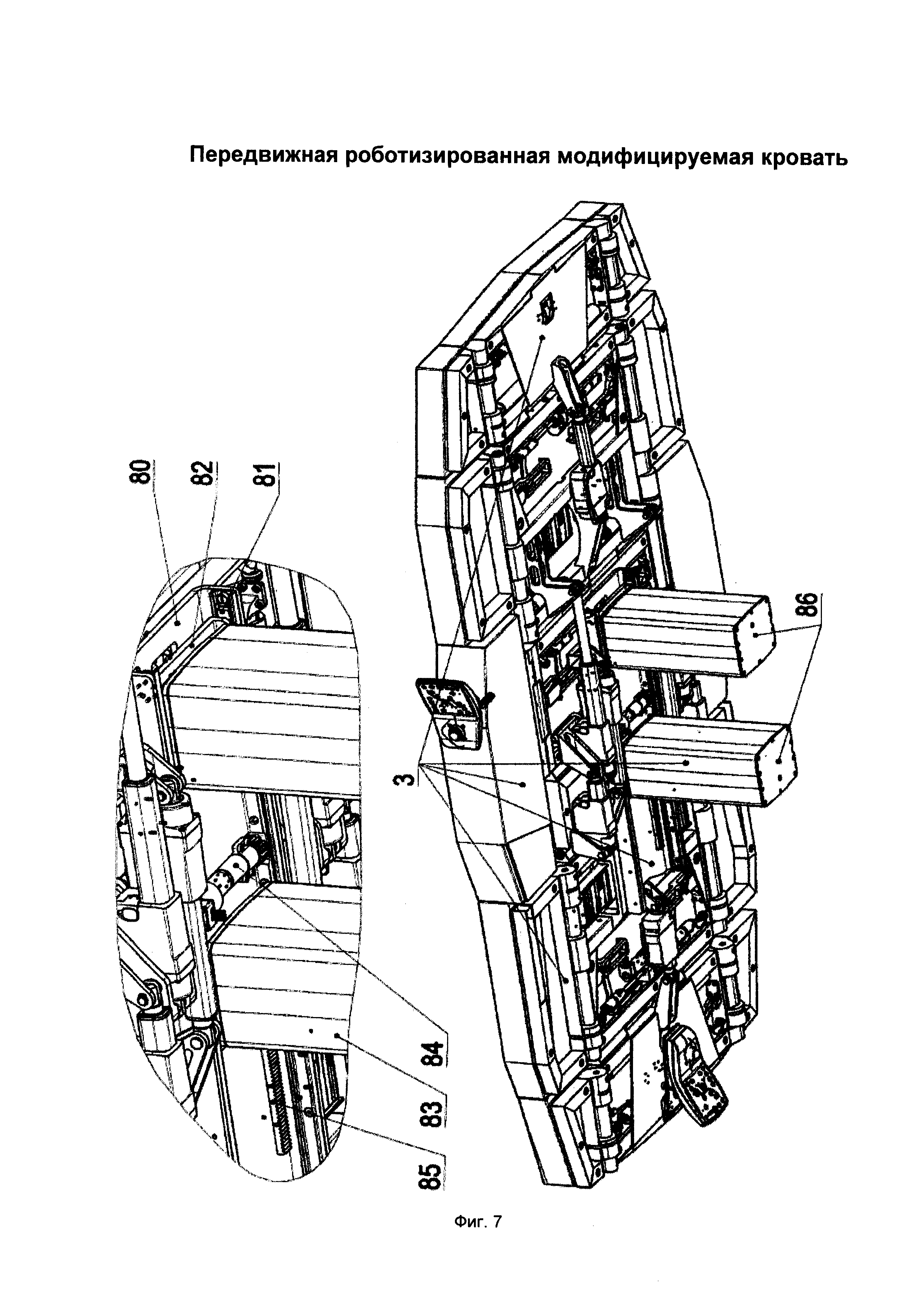
Фиг. 7 - Общий вид системы позиционирования передвижной роботизированной модифицируемой кровати в аксонометрической проекции вместе с ее выдвижными телескопическими стойками, которые заканчиваются ножками для соединения с всенаправленной ходовой частью. На выносном элементе изображен привод выдвижной секции модифицируемой несущей поверхности, включая присоединение выдвижных телескопических стоек.
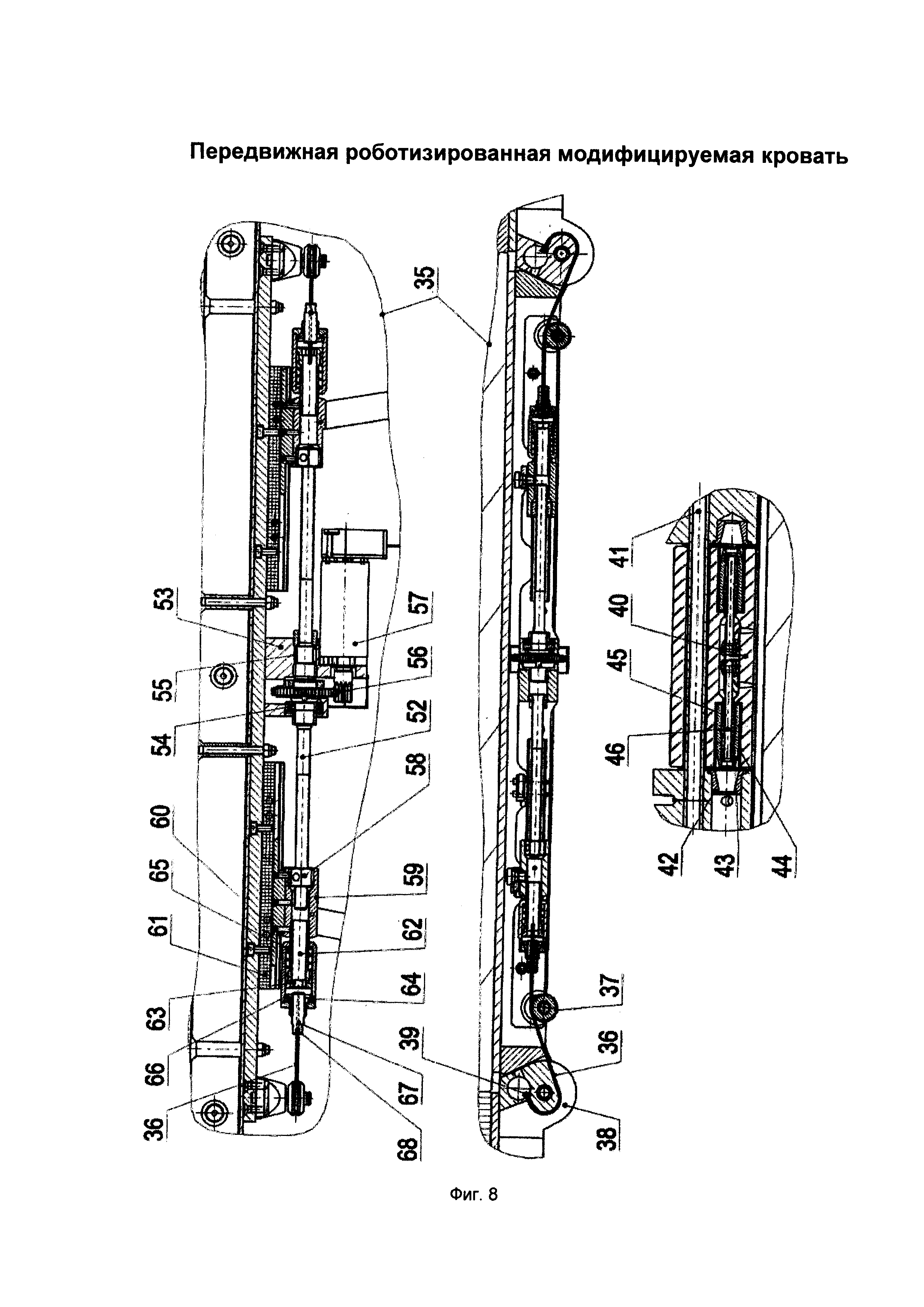
Фиг. 8 - Детальное представление вида в разрезе линейного привода боковых частей с двухходовым винтом для движения влево/вправо и выносной элемент с изображением конического соединения.
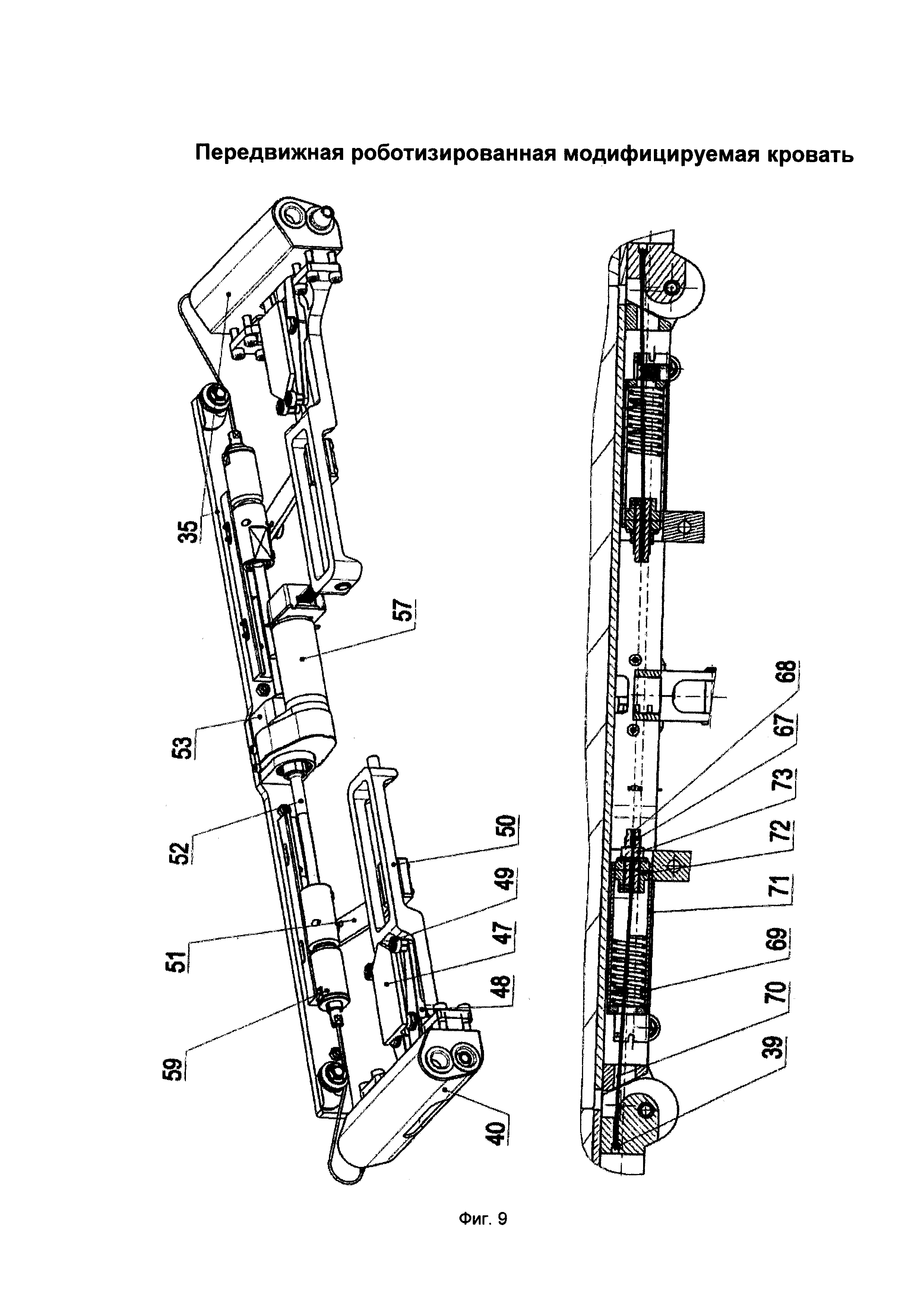
Фиг. 9 - Линейный привод боковых частей в аксонометрии с коническими соединениями, далее в разрезе изображена пружина растяжения для боковых частей в соответствующей направляющей трубке с тросом Боудена для боковых частей.
Пример осуществления изобретения
Передвижная роботизированная и модифицируемая кровать 1 с возможностью управляемой регулировки системы позиционирования 3 и модифицируемой несущей поверхности 4, включая возможность трансформации модифицируемой несущей поверхности 4 в горизонтальное ложе, состоит из передвижной всенаправленной ходовой части 2, на которой расположена модифицируемая несущая поверхность 4.
Основным сборочным узлом всенаправленной ходовой части 2 является центральная рама 5, в верхней части которой находятся четыре линейных направляющих 6 ходовой части. На каждой паре этих линейных направляющих 6 в направлении вперед/назад закреплена телескопическая рама 7, причем в каждой из них с помощью сайлент-блоков 8 установлена неподвижная ось 9, состоящая из соединительной части 10 и колес Илона 12, причем в соединительной части 10 расположены приводы вращения 11 колес Илона 12.
Передняя и задняя телескопические рамы 7 связаны с линейным приводом 13 выдвижной секции ходовой части, а оба крайних положения выдвижных телескопических рам 7 определяются резиновыми упорами 14 на телескопической раме. В телескопические рамы 7 встроены блоки управления 15 приводов вращения 11 колес. Вдоль центральной рамы 5, в ее нижней части, находится соосное ей зарядное устройство для батарей 16, а у него по бокам расположены батареи 17.
Кроме того, передвижная всенаправленная ходовая часть 2 по своему периметру снабжена амортизирующими элементами 18, которые жестко закреплены на центральной раме. Амортизирующие элементы 18, расположенные по периметру в направлении вперед-назад, являются частью выдвижных телескопических рам 7. Под ними находится раздельная в продольном и осевом направлении и закрепленная на центральной раме 5 центральная обшивка 19, а также оба сегмента передней обшивки 20, закрепленные на выдвижных телескопических рамах 7. В осевой и нижней части центральной рамы 5 находится стыковая поверхность 21, содержащая элементы для прочного присоединения подходящей надстройки, например передвижной модифицируемой несущей поверхности 4.
Еще одним крупногабаритным сборочным узлом является модифицируемая несущая поверхность 4, состоящая из следующих основных поперечных и одновременно дробных секций сборочного узла рамы: головная секция 22, спинная секция 23, тазовая секция 24, бедренная секция 25, ножная секция 26 и стопная секция 27.
Каждая из этих секций, за исключением тазовой секции 24, состоит из одной центральной части 28 и двух боковых частей 29, причем все центральные части 28 в продольном направлении образуют дробную центральную секцию 30, а все боковые части 29 - две продольные боковые секции. Тазовая секция 24 состоит только из центральной части 28.
Примыкающие друг к другу центральные 28 и боковые части 29 соединены между собой соосно и с возможностью поворота посредством смещенных шарниров 34, которые жестко соединены с соответствующими частями, а противоположные части в осевом направлении соединены осью шарнира 41. Боковые части 32 бедренной секции в верхнем положении снабжены опорами для рук 33.
Позиционирование противоположных боковых частей 29 осуществляется всегда посредством линейного привода 35 боковых частей и тросов Боудена 36 линейного привода через поворотный ролик 37, причем трос Боудена проходит через эксцентрический паз 38 боковой части 29 и закреплен в боковой части 29 концевым элементом троса Боудена 39. Каждая из боковых частей 29 модифицируемой несущей поверхности 4 блокируются в ровном (горизонтальном) положении одним или двумя коническими соединениями 40, управление которыми также осуществляется при помощи соответствующего линейного привода 35 боковой части.
Коническое соединение 40 находится вблизи оси шарнира 41, причем в одном из противоположных смещенных шарниров 34 установлена коническая втулка 42, в которую входит выдвижной конус 43, установленный в скользящих опорах 44 второго противоположного, смещенного, шарнира 34 и выталкиваемый пружиной конуса 45. Из этого положения выдвижной конус 43 выдвигается тягой 46, управляемой кулисой 47 и поворотным рычагом 48. Кулиса 47 содержит направляющий стержень 49 и проходит в теле направляющего элемента 50, связанного рычагом 51 с подвижной втулкой 59. Важным компонентом линейного привода 35 боковой части является ходовой винт для перемещения влево/вправо 52, установленный в центральной части 28 в блоке фиксации 53 в комбинированном радиально-осевом подшипнике 54 и радиальном подшипнике 55. Привод ходового винта 52 для перемещения влево/вправо осуществляется от одноступенчатой передачи 56, расположенной между подшипниками и приводимой вращательным приводом 57, закрепленным также на блоке фиксации 53. В каждое из противоположных резьбовых отверстий вкручен ходовой винт 58 с соответствующей резьбой, причем каждый из них установлен в подвижной втулке 59. Каждая подвижная втулка 59 сбоку жестко соединена с установленным в соответствующей направляющей 61 фасонным ползуном 60, передняя часть подвижной втулки 59 жестко соединена с подвижной втулкой 62, которая заканчивается жестко соединенным с ней буртиком 63. На этом узле размещена подвижная втулка 64 с замыкающим двойным буртиком. Между этим буртиком и буртиком 63 находится пружина растяжения 65. Ко второму буртику подвижной втулки 64 с замыкающим двойным буртиком прилегает буртик 66 винта, и в этот буртик вкручен установочный винт 67. К этому винту в осевом направлении прикреплен концевой элемент троса Боудена 36 линейного привода, фиксируемый двумя нажимными винтами 68.
Обратное движение боковых частей 29 обеспечивают пружины 69 с помощью тросов Боудена 70 боковых частей. Каждая из пружин 69 всегда проходит через направляющую трубку 71 и сжимается направляющей головкой 72 с буртиком, к которому прилегает установочная гайка 73 с установочным винтом 67, к которому в осевом направлении прикреплен концевой элемент троса Боудена 70 боковой части, фиксируемый нажимными винтами 68.
Позиционирование каждого отдельного сегмента центральной секции 30 посредством смещенных шарниров 34 осуществляется в каждом случае всегда с помощью одного или обоих линейных приводов 74 центральной секции.
В несущую поверхность опоры для рук 33, в обе боковые части 32 бедренной секции, встроен вставной кронштейн 75 для блока управления 76, который может быть также расположен в откидной панели 77, закрепляемой с задней стороны центральной части 28 головной секции 22.
Поверхности всех частей модифицируемой несущей поверхности 4 снабжены обивкой 78, по внешним краям 79 соответствующим образом усиленной и расположенной с небольшим уклоном к центральной зоне ложа. Кроме того, центральные части 28 в замыкающей зоне головной секции 22 расположены под небольшим уклоном к центру модифицируемой несущей поверхности 4.
С тазовой секцией 24 в центральной основной секции модифицируемой несущей поверхности 4 жестко соединена вставка 80 ложа, посредством обеих линейных направляющих 81 выдвижной секции соединенная с вставкой 82 стоек, жестко соединяя головки одной или обеих выдвижных телескопических стоек 83. В насадку стойки 82 интегрирован вращательный привод 84 выдвижной секции несущей поверхности, входящей в геометрическое зацепление с фасонной гребенкой 85, которая является частью вставки 80 несущей поверхности.
С противоположной стороны выдвижных телескопических стоек 83 находятся их ножки 86 вместе с их соединительными элементами, предназначенные для соединения со стыковой поверхностью 21 передвижной всенаправленной ходовой части 2.
Принцип действия
Основной принцип действия передвижной роботизированной модифицируемой кровати 1 заключается в возможности изменения ее положений, включая ее регулирование по высоте и способность к движению во всех направлениях, причем благодаря управляемому перемещению системы позиционирования 3 модифицируемой несущей поверхности 4 удается получить большой диапазон требуемых положений вплоть до трансформации модифицируемой несущей поверхности 4 в горизонтальное ложе.
Возможность движения во все направления обеспечивает всенаправленная ходовая часть 2, основная секция которой образует центральную раму 5, в верхней части которой в направлении вперед-назад находятся линейные направляющие 6 ходовой части, на которые навешены (выдвижные) телескопические рамы 7, причем на каждой из них посредством сайлент-блоков (резинометаллических упругих элементов) 8 установлена жесткая ось 9, состоящая из соединительной части 10, в которой находятся приводы вращения 11 колес, каждый из которых с помощью фланца смонтирован на соединительной части 10. Частью жесткой оси 9 являются колеса Илона 12.
Если модифицируемая несущая поверхность 4 переводится в горизонтальное положение, то в целях обеспечения стабильности требуется увеличить расстояние между жесткими осями 9 колес. Это достигается с помощью линейного привода 13 выдвижной секции ходовой части, соединяющего обе выдвижные телескопические рамы 7, причем позиционирование телескопических рам 7 в их крайних положениях обеспечивается резиновыми упорами 14 выдвижной телескопической рамы. В эту телескопическую раму 7 встроены блоки управления 15 приводов вращения 11 колес.
Кроме того, кровать снабжена удобным в использовании зарядным устройством 16 для зарядки батарей, находящимся в нижней зоне центральной рамы 5, в ее центральной несущей поверхности, а батареи 17 установлены в боковых поверхностях этой рамы.
Важными деталями являются проходящие по периметру амортизирующие элементы 18, при этом боковые из них жестко закреплены на центральной раме 5, а буферы спереди и сзади - на телескопической раме 7. Раздельная в продольном и осевом направлении и закрепленная на центральной раме 5 центральная обшивка 19, а также оба размещенных на выдвижных телескопических рамах 7 сегмента передней обшивки 20 предусмотрены не только из соображений безопасности, но и в эстетических целях.
Кроме того, в центральной несущей поверхности центральной рамы 5 находится стыковая поверхность 21, содержащая элементы для прочного присоединения подходящей надстройки, например модифицируемой несущей поверхности 4.
Большое число всех возможных положений модифицируемой несущей поверхности 4 при плавном переходе из одного базового положения в другое, т.е. в положение сидя, в котором передвижная и модифицируемая кровать 1 имеет форму кресла/кресла-каталки, и в положение лежа, достигается за счет соответствующего деления (дробности) в поперечном и продольном направлении.
Модифицируемая несущая поверхность 4 состоит из следующих основных поперечных секций и одновременно дробных секций сборочного узла рамы: головная секция 22, спинная секция 23, тазовая секция 24, бедренная секция 25, ножная секция 26 и стопная секция 27. Каждая из этих секций (помимо тазовой секции 24) состоит из одной центральной части 28 и двух боковых частей 29, так что модифицируемая несущая поверхность 4 в продольном направлении подразделена на центральную секцию 30 и две противолежащие боковые секции 31. Только в тазовой секции имеется лишь одна центральная часть 28.
Примыкающие друг к другу центральные 28 и боковые части 29 соединены между собой соосно и с возможностью поворота с помощью смещенных шарниров 34, которые позволяют изменять формы системы позиционирования передвижной роботизированной модифицируемой кровати 1. Все боковые части 29, за исключением боковых частей 32 бедренной секции, могут складываться примерно на 180°, а боковые части 32 бедренной секции могут откидываться вверх на 90°, а их верхние кромки в то же время с каждой стороны образуют опору для рук 33.
Упомянутые движения, прежде всего модифицируемой несущей поверхности 4, осуществляются с помощью линейных приводов 35 боковых частей, а также с помощью тросов Боудена 36 линейного привода и с помощью поворотного ролика 37, причем трос Боудена проходит через эксцентрический паз 38 боковой части 29. Учитывая, что все боковые части 29 в пределах выровненной модифицируемой несущей поверхности 4 заблокированы коническими соединениями 40, управление которыми также осуществляется с помощью соответствующего линейного привода 35 боковой части, линейный привод 35 открывает ее только в первой фазе движения, только во второй фазе движения начинается движение боковых частей 29 за счет тросов Боудена 36 линейного привода, закрепленных каждый своим концевым элементом 39 в боковых частях 29.
В стремлении максимально сократить управляющие усилия для складывания боковых частей 29 необходимо блокировать их в их рабочем положении. Для этого целесообразно использовать коническое соединение 40.
Обратное движение каждой из боковых частей 29 достигается посредством пружины 69 и троса Боудена 70 боковой части. Пружина 69 размещена в направляющей трубке 71, она сжимается направляющей головкой 72 с буртиком, а по его оси расположен установочный винт 67 с установочной гайкой 73, причем по оси установочного винта 67 закреплен концевой элемент троса Боудена 70 боковой части, зафиксированный там нажимными винтами 68.
Взаимные поворотные движения в пределах центральной секции 30 осуществляются за счет линейных приводов 74 центральной секции, а именно с помощью смещенных шарниров 34. Всеми движениями системы позиционирования передвижной роботизированной модифицируемой кровати 1 управляет блок управления 76, причем в целях упрощения управления некоторые операции могут быть заранее запрограммированы, чтобы обеспечить возможность автоматического выполнения.
Конические соединения 40 находятся вблизи оси 41 шарнира. Их задача заключается в том, чтобы точно блокировать положение боковых частей 29 относительно центральной части 28, причем так, чтобы формировалась требуемая модифицируемая несущая поверхность 4. Коническое соединение 40 достигается за счет соединения смещенных шарниров 34, где находится коническая втулка 42, с другим противоположным смещенным шарниром 34, содержащим установленный в скользящих втулках 44 телескопический конус 43, который сжимается пружиной 45 в своем функциональном положении. Коническое соединение 40 размыкается посредством тяги 46, управляемой поворотным рычагом 48, на который действует давление кулисы 47, составной частью которой является установленный в теле направляющего элемента 50 направляющий стержень 49, связанный рычагом 51 с подвижной втулкой 59.
Для размыкания конических соединений 40 и для перемещения боковых частей 29 в каждой из поперечных секций предназначен линейный привод 35 боковых частей. Основным элементом этого привода является ходовой винт 52 для перемещения влево/вправо, установленный с возможностью вращения с помощью радиально-осевого подшипника 54 и радиального подшипника 55 в блоке фиксации 53 и приводимый в движение при помощи вращательного привода 57, закрепленного в блоке фиксации 53 посредством фланца, а ходовой винт 52 для перемещения влево/вправо, в свою очередь, приводится одноступенчатой передачей 56.
Требуемое линейное перемещение обеспечивают ходовые винты 58 с соответствующей резьбой по сравнению с используемым в подвижной втулке 59 ходовым винтом 52 для перемещения влево/вправо, с которым сбоку соединен фасонный ползун 60, движущийся в направляющей 61.
Подвижная втулка 59 настраивается посредством подвижной втулки 62 с буртиком 63, причем между ней и буртиком 63 подвижной втулки 64 с замыкающим двойным буртиком вложена пружина растяжения 65. На втором буртике 63 подвижной втулки 64 с замыкающим двойным буртиком лежит буртик винта 66, в зацепление с которым в осевом направлении входит установочный винт 67, за который в то же время посредством двух нажимных винтов 68 закреплен концевой элемент троса Боудена 36 линейного привода.
В несущей поверхности опоры для рук 33, в обеих боковых частях 32 бедренной секции, находится вставной кронштейн 75, в который вставлен блок управления 76. Таким образом, он может использоваться как с левой, так и с правой стороны. Кроме того, блок управления 76 может размещаться на откидной панели 77, находящейся в центральной части 28 головной секции 22, за счет чего системой позиционирования передвижной роботизированной модифицируемой кровати 1 может управлять один единственный оператор.
При переводе модифицируемой несущей поверхности 4 из положения лежа в положение сидя требуется, чтобы эта структура перемещалась вперед. Возможность указанного движения обеспечивается с помощью линейных направляющих 81 выдвижного узла, находящихся между вставкой 80 несущей поверхности, жестко соединенной с центральной частью 28 тазовой секции 24, и вставкой 82 стоек, соединяющей головки выдвижных телескопических стоек 83. Взаимное движение упомянутых ответных элементов осуществляется посредством вращательного привода выдвижной секции 84 несущей поверхности, которая является частью вставки 82 стоек и входит в зацепление с фасонной гребенкой 85, которая, в свою очередь, является частью вставки 80 несущей поверхности.
Регулирование по высоте осуществляется с помощью одной или нескольких выдвижных телескопических стоек 83, которые внизу установлены на ножки 86, снабженные соединительными элементами, предназначенными для соединения, например, с передвижной всенаправленной ходовой частью 2 со стыковой поверхностью 21, подобранной для стыковки с соответствующей надстройкой.
Все части модифицируемой несущей поверхности 4 снабжены удобной в эксплуатации обивкой 78, причем обивка 78 соответствующим образом усилена по внешним краям 79 и расположена с небольшим уклоном к центральной зоне ложа. Кроме того, центральные части 28 в конечных зонах головной секции 22 и стопной секции 27 также выполнены под небольшим уклоном к середине модифицируемой несущей поверхности 4, что обеспечивает определенную защиту от падения с модифицируемой несущей поверхности.
Промышленная применимость
Передвижная роботизированная и модифицируемая кровать представляет собой универсальную систему позиционирования с большим числом всех возможных позиций модифицируемой несущей поверхности, включая большой диапазон положений при переходе из двух крайних точек, т.е. из позиции сидя, когда передвижная модифицируемая кровать имеет форму кресла, в позицию лежа, т.е. в полностью горизонтальное положение, и наоборот. Устройство может регулироваться по высоте, а также способно перемещаться во всех направлениях с использованием ручного, а также дистанционного блока управления либо выполнять автоматизированные движения. Универсальность устройства заключается в большом количестве самых разных помещений, где оно может использоваться: устройство подходит для применения как на дому и в разных условиях в медицинских учреждениях, так и на улице.
Разработанная универсальная роботизированная система транспортировки и позиционирования пригодна как для пожилых людей, так и для иммобильных пациентов или пациентов в период лечения. Поэтому она подходит для систематического использования в учреждениях системы здравоохранения.
Реферат
Изобретение относится к передвижному универсальному роботизированному устройству позиционирования и направлено на повышение удобства пользования. Передвижная роботизированная модифицируемая кровать состоит из всенаправленной ходовой части и модифицируемой несущей поверхности, оснащенной системой позиционирования, обеспечивающей возможность управляемого регулирования, причем эта всенаправленная ходовая часть содержит центральную раму, в верхней части которой находятся четыре линейных направляющих ходовой части, на каждой паре этих линейных направляющих в направлении вперед/назад подвешена телескопическая рама и в каждой из них размещена неподвижная ось, состоящая из соединительной части и колес Илона, причем в этой соединительной части размещен привод колес Илона, передняя и задняя выдвижные телескопические рамы связаны линейным приводом выдвижной секции ходовой части, при этом в телескопические рамы встроены блоки управления приводами вращения колес. Вдоль продольной оси центральной рамы, в ее нижней части, расположено зарядное устройство для батарей и батареи по бокам, а передвижная всенаправленная ходовая часть по своему периметру снабжена амортизирующими элементами, а также разделенной в продольном и осевом направлении центральной обшивкой. В соосной нижней части центральной рамы расположена стыковая поверхность, содержащая элементы для стыковки с функциональной конструкцией требуемого типа передвижной всенаправленной ходовой части. Модифицируемая несущая поверхность состоит из основных секций поперечных и в то же время дробных сборочных узлов в виде секций рамы, а именно: из головной секции, спинной секции, тазовой секции, бедренной секции, ножной секции и стопной секции, и каждая из этих секций состоит из одной центральной части и двух боковых частей, где все центральные части в продольном направлении образуют дробную центральную секцию, а все боковые части - две продольные боковые секции, в то время как тазовая секция состоит только из центральной части. Примыкающие друг к другу центральные и боковые части соединены друг с другом соосно с возможностью поворота, позиционирование каждой из противоположных боковых частей и блокировка боковых частей в горизонтальном положении осуществляются приводом боковых частей, позиционирование каждого отдельного сегмента центральной секции осуществляется линейными приводами центральной секции. С тазовой секцией вдоль основной центральной оси модифицируемой несущей поверхности жестко соединена вставка несущей поверхности, связанная линейными направляющими выдвижной секции с вставкой стоек, а между модифицируемой несущей поверхностью и передвижной всенаправленной ходовой частью расположен узел сопряжения, присоединительные элементы которого входят в зацепление со стыковой поверхностью передвижной всенаправленной ходовой части. 2 н. и 9 з.п. ф-лы, 9 ил.
Комментарии