Двухподвижная вращательная кинематическая пара - RU2755441C1
Код документа: RU2755441C1
Чертежи


Описание
Изобретение относится к машиностроению, в частности к шарнирным соединениям звеньев деталей машин.
Из теории механизмов и машин известно, что любой механизм состоит из звеньев и их подвижных соединений между собой в виде разнообразных кинематических пар (Артобелевский И.И. Теория механизмов и машин. Учебник для втузов. - 4-е изд. перераб. и доп. - М.: Наука, Гл.ред. физ-мат. лит., 1988 - 640, с. 20).
Известна пятиподвижная (H=5) кинематическая пара, образованная опорным звеном в виде шара (Артоболевский И.И. Теория механизмов и машин. Учебник для втузов. - 4-е издание, перераб. и доп. - М: Наука, Гл. ред. физ-мат. лит., 1988, с. 24, рис. 1.4, в) - аналог №1.
Недостатком этой кинематической пары является избыточное число «Я» подвижностей звеньев, а именно более двух, что приводит к неуправляемости механической системы.
Также известна трехподвижная (H=3) сферическая кинематическая пара, образованная опорным звеном в виде круглой сферы и воздействующего звена в виде шара, установленного внутри этой сферы (United States Patent No. 4,628,765. 1968) - аналог №2
Недостатком указанной трехподвижной кинематической пары является сложность изготовления и сборки из-за необходимости ее выполнения с точным пересечением только в одной точке всех трех осей вращения звеньев. Кроме того, практика машиностроения часто требует осуществления лишь двух относительных вращательных движений звеньев (Я=2) относительно двух взаимно-перпендикулярных осей. Описание выше пятиподвижная и трехподвижная кинематические пары этому требованию не удовлетворяют.
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому изобретению, является двух подвижная кинематическая пара, состоящая из соединения опорного звена и воздействующего звена, в которой опорное звено выполнено в виде круговой параболической лунки, а воздействующее звено выполнено в виде параболической бочки, образующая которой конгруэнтна параболической лунке (патент RU 2681467, Бюл. 7, 2019 г. «Одноконтактная двухподвижная кинематическая пара»).
Недостатками указанной двухподвижной кинематической пары являются:
1. Сложность конструкции и высокая трудоемкость изготовления круговой параболической лунки и смежной (конгруэнтной) с ней параболической бочки с точно совпадающими между собой сложными поверхностями переменной кривизны, что требует применения сложного и дорогостоящего обрабатывающего оборудования.
2. Данная кинематическая пара допускает возможность самопроизвольного (т.е. неуправляемого) перемещения звена в виде бочки по стенке лунки вокруг оси «у». Это приводит к третьей подвижности (вокруг оси «у») - которая является вредной, так как заявленная «как двухподвижная» данная кинематическая пара превращается в «трехподвижную», что приводит к неработоспособности механизма с такой парой из-за самопроизвольного увеличения его подвижности W>1 и потери его управляемости.
В основу изобретения положена техническая задача, заключающаяся в упрощении конструкции двухподвижной кинематической пары, снижения трудоемкости и стоимости ее изготовления и сборки, а также обеспечении между подвижными соприкасающимися звеньями двух относительных вращательных движений относительно двух взаимно перпендикулярных осей.
Получение технического результата достигается за счет того, что в кинематической паре, состоящей из соединения опорного звена и воздействующего звена, согласно изобретения опорное звено выполнено в виде пустотелого цилиндра вращения с полукруговой образующей, а воздействующее звено выполнено в виде поворотного цилиндра с закругленными по полусфере двумя торцами, образующая которых конгруэнтна внутренней поверхности пустотелого цилиндра.
Сущность изобретения поясняется чертежом, где на фиг. 1 изображена двухподвижная вращательная кинематическая пара, на фиг. 2 дан разрез в плоскости «z - у»; на фиг. 3 показан вид А на фиг. 1; на фиг. 4 представлено опорное звено с монтажным пазом «Т».
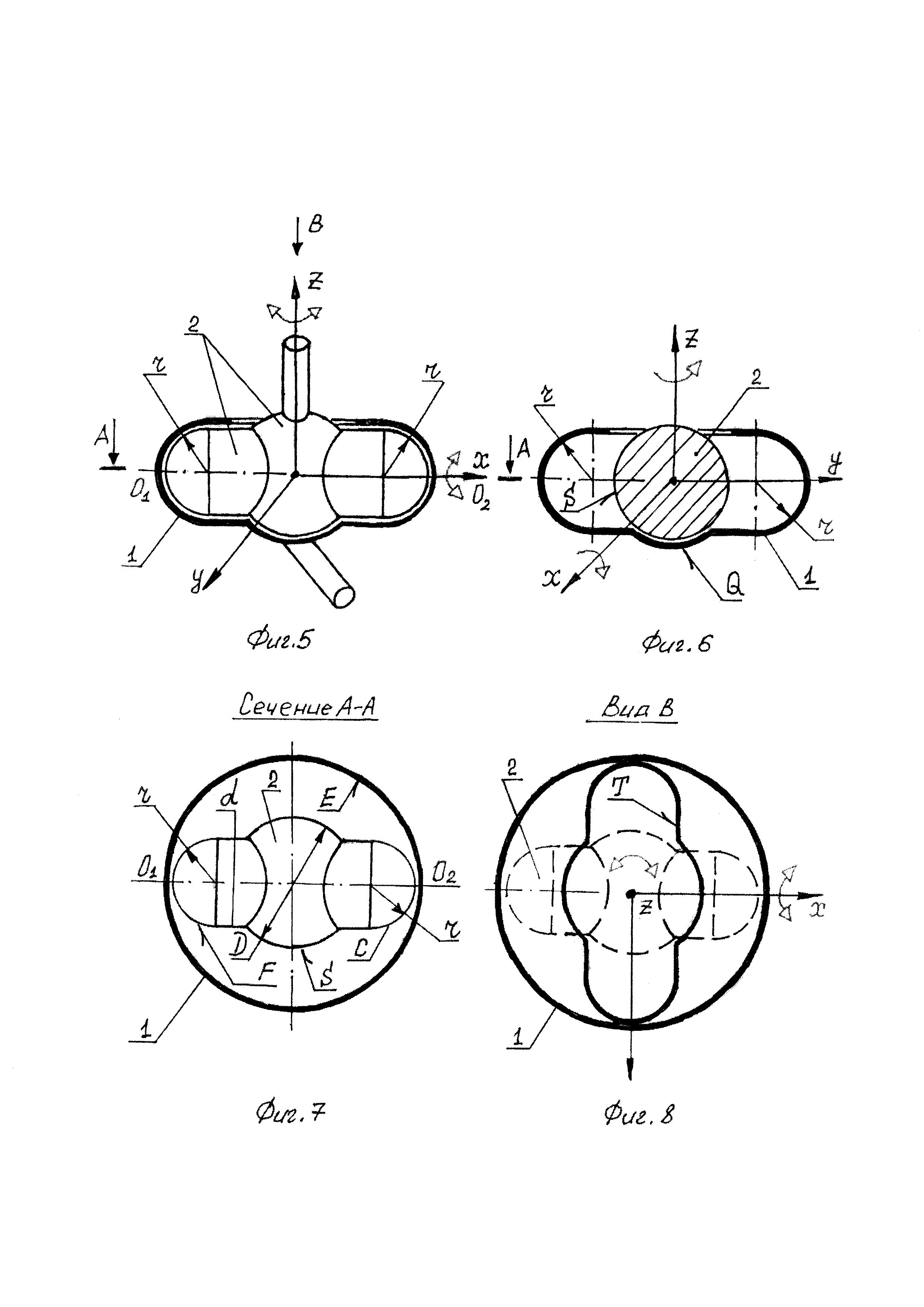
Дополнительно на фиг. 5, фиг. 6, фиг. 7, фиг. 8, фиг. 9, фиг. 10, фиг. 11 и фиг. 12 представлены варианты выполнения двухподвижной вращательной кинематической парой.
Двухподвижная вращательная кинематическая пара (фиг. 1 -фиг. 4) состоит из соединения опорного звена 1 в виде пустотелого цилиндра вращения с полукруговой образующей радиусом «г», и воздействующего звена 2 в виде поворотного цилиндра с закругленными по полусфере радиусом «г» двумя торцами F и С, образующая которых конгруэнтна внутренней поверхности Е пустотелого цилиндра звена 1. Поворотный цилиндр звена 2 при сборке кинематической пары через монтажный паз «Г» надежно устанавливается внутри пустотелого цилиндра звена 1 с контактом по его внутренней поверхности Е через оба полусферических торца F и С, что обеспечивает требуемое беспрепятственное вращение только вокруг двух осей «z» и «х». Поворотный цилиндр звена 2 может быть выполнен с цилиндрической частью диаметром который может быть равен удвоенному радиусу кривизны «г» его полусферических торцов F и С, где d=2r.
В представленном на фиг. 5, фиг. 6, фиг. 7 и фиг. 8 варианте выполнения двухподвижной вращательной кинематической пары - поворотный цилиндр воздействующего звена 2 вдоль его геометрической оси Ог02 сблокирован с шаром, диаметр которого «D» (фиг. 7) превышает диаметр «d» поворотного цилиндра (D>d), а пустотелый цилиндр опорного звена 1 выполнен с соосно расположенной с этим шаром сферической полостью «Q» (фиг. 6), образующая которых конгруэнтна сферической поверхности шара «5».
В представленном на фиг. 9, фиг. 10, фиг. 11 и фиг. 12 варианте выполнения двухподвижной кинематической пары поворотный цилиндр диаметра «d» сблокирован с установленными на его концах симметрично с двух сторон двумя шарами одинакового диаметра (d1=2r)>d, образующая которых конгруэнтна внутренней поверхности Е пустотелого цилиндра.
Дополнительно поворотный цилиндр воздействующего звена 2 может быть выполнен с наружным слоем из упругого полимерного материала, например, каучука, деформируемого при сборке этого цилиндра с опорным звеном 1 для образования между ними беззазорной кинематической пары.
Для работы предлагаемой кинематической пары в агрессивных средах, поворотный цилиндр и опорное звено могут быть выполнены из композитного антифрикционного материала, например, полиуретана или полистирола с различными наполнителями.
Работает предлагаемая кинематическая пара следующим образом: если опорное звено 1 в виде пустотелого цилиндра принять за неподвижное, то воздействующее звено 2 в виде поворотного цилиндра может беспрепятственно вращаться вокруг оси «z» и поворачиваться относительно своей геометрической оси «х».
Положительный эффект предлагаемой двухподвижной вращательной кинематической пары заключается в упрощении конструкции, снижении трудоемкости изготовления и монтажа, а также простоте сборки и разборки соединения звеньев кинематической пары без применения крепежных узлов.
Реферат
Изобретение относится к машиностроению, в частности к шарнирным соединениям звеньев деталей машин. Двухподвижная вращательная кинематическая пара состоит из соединения опорного звена (1) и воздействующего звена (2), в котором опорное звено (1) выполнено в виде пустотелого цилиндра вращения с полукруговой образующей, а воздействующее звено (2) выполнено в виде поворотного цилиндра с закругленными по полусфере двумя торцами, образующая которых конгруэнтна внутренней поверхности пустотелого цилиндра. Технический результат: упрощение конструкции, снижение трудоемкости изготовления и монтажа, а также простота сборки и разборки двухподвижной кинематической пары без применения крепежных узлов. 5 з.п. ф-лы, 12 ил.
Комментарии