Механизированный инструмент - RU2268818C2
Код документа: RU2268818C2
Чертежи
Описание
Предпосылки создания изобретения
Область техники, к которой относится изобретение
Настоящее изобретение касается механизированного инструмента и более конкретно способа уменьшения вибрации в механизированном инструменте типа молотка и молоткового перфоратора, который линейно приводит в движение головку молотка в предварительно определенном цикле.
Известный уровень техники
Опубликованная выложенная заявка на патент Японии № 52-109673 раскрывает молоток со снижающим вибрацию устройством. Согласно известной технике, внутри кожуха корпуса образована за одно целое виброизолирующая камера, а внутри виброизолирующей камеры размещено средство динамического снижения вибрации. Средство динамического снижения вибрации служит для снижения вибрации относительно величины вибрации, вводимой в средство динамического снижения вибрации. Особенно внутри молотка, во время работы молотка может развиться сильная вибрация в осевом направлении головки молотка.
В вышеупомянутом средстве динамического снижения вибрации груз располагается под действием силы смещения упругого элемента. Динамическое средство снижения вибрации выполняет функцию снижения вибрации с помощью груза, который приводится в действие в соответствии с величиной вибрации, которая вводится в средство динамического снижения вибрации. Более конкретно средство динамического снижения вибрации является пассивным, так как величина снижения вибрации средством динамического снижения вибрации зависит от величины вводимой вибрации. С другой стороны, при фактическом действии с использованием механизированного инструмента пользователь, который держит механизированный инструмент, может по возможности сильно прижимать механизированный инструмент к обрабатываемой детали для выполнения работы на обрабатываемой детали. В таком случае, хотя потребность в снижении вибрации велика, величина вибрации, вводимой в средство динамического снижения вибрации, уменьшится, потому что пользователь сильно прижимает механизированный инструмент к обрабатываемой детали. Таким образом, почти вся вибрация передается на тело пользователя механизированного инструмента. Поэтому необходимо средство динамического снижения вибрации, которое может смягчить вибрацию независимо от величины вибрации, вводимой в средство динамического снижения вибрации.
Сущность изобретения
Соответственно целью настоящего изобретения является обеспечение механизированного инструмента, имеющего дополнительную улучшенную характеристику снижения вибрации.
Согласно настоящему изобретению, характерный механизированный инструмент может содержать головку инструмента, приводной механизм и средство динамического снижения вибрации. Приводной механизм линейно приводит в движение головку инструмента посредством колебаний давления, заставляя головку инструмента выполнять предварительно определенное действие. Головкой молотка может быть обычный образец головки инструмента. Головку инструмента можно приводить в действие прямо или косвенно, посредством колебаний давления в приводном механизме.
Средство динамического снижения вибрации в настоящем изобретении содержит груз и упругий элемент. Груз может совершать возвратно-поступательное движение под действием силы смещения упругого элемента. Груз средства динамического снижения вибрации может воспринимать по меньшей мере силу смещения упругого элемента и может также быть сконструирован так, чтобы дополнительно воспринимать силу амортизации амортизирующего элемента.
Настоящее изобретение имеет особенность, заключающуюся в том, что груз приводится в действие колебаниями давления, образующимися в приводном механизме. Средство динамического снижения вибрации является по существу механизмом, который пассивно снижает вибрацию с помощью груза, которым управляют согласно введению вибрации с внешней стороны. В настоящем изобретении груз средства динамического снижения вибрации можно активно приводить в действие колебаниями давления в приводном механизме для приведения в действие головки инструмента. Поэтому независимо от величины вибрации, действующей на механизированный инструмент, средство динамического снижения вибрации может работать принудительно и устойчиво. Таким образом, механизированный инструмент по настоящему изобретению может эффективно выполнять функцию снижения вибрации, даже когда, например, пользователь использует механизированный инструмент с прикладыванием сильного давящего усилия к механизированному инструменту.
Приводной механизм предпочтительно может включать в себя приводной электродвигатель, боек и кривошипно-шатунный механизм. Боек совершает возвратно-поступательное движение в осевом направлении головки инструмента, чтобы заставить головку инструмента совершать возвратно-поступательное движение. Кривошипно-шатунный механизм приводит в действие боек, преобразуя входную мощность вращения приводного электродвигателя в линейное перемещение в осевом направлении головки молотка. Средство динамического снижения вибрации может иметь корпус, который вмещает груз. Колеблющееся давление, образующееся внутри камеры кривошипа с помощью приведения в действие кривошипно-шатунного механизма, можно вводить в корпус средства динамического снижения вибрации так, чтобы груз принудительно приводить в движение в направлении, противоположном направлению возвратно-поступательного движения бойка.
Взаимосвязь между действием кривошипно-шатунного механизма и рабочим объемом камеры кривошипа в общем следующая. Когда кривошипно-шатунный механизм приводят в действие так, что боек перемещается к головке инструмента, рабочий объем камеры кривошипа растет. В этом случае давление внутри камеры кривошипа падает по сравнению с давлением перед увеличением рабочего объема камеры кривошипа. И, наоборот, когда кривошипно-шатунный механизм приводят в действие так, что боек перемещается от головки инструмента, рабочий объем камеры кривошипа уменьшается. В этом случае давление внутри камеры кривошипа растет по сравнению с давлением перед уменьшением рабочего объема камеры кривошипа. Таким образом, давление внутри камеры кривошипа может колебаться в соответствии с перемещением бойка и может быть введено в корпус средства динамического снижения вибрации.
Когда боек перемещается к головке инструмента, груз средства динамического снижения вибрации перемещается от головки инструмента посредством использования относительного понижения давления в камере кривошипа. Например, можно сделать конструкцию, при которой груз отодвигается в направлении от головки инструмента под действием относительно пониженного давления в камере кривошипа. Когда боек перемещается от головки инструмента, груз средства динамического снижения вибрации перемещается к головке инструмента из-за относительного увеличения давления в камере кривошипа. Например, его можно сконструировать так, что груз придвигается к головке инструмента под действием относительно увеличенного давления в камере кривошипа. При использовании фактического действия механизированного инструмента, между изменением рабочего объема в камере кривошипа и движением ударного механизма может возникать небольшая временная задержка. Поэтому предпочтительно можно выполнять регулирование времени принудительного возвратно-поступательного движения груза внутри средства динамического снижения вибрации в соответствии с такой временной задержкой.
Груз средства динамического снижения вибрации по существу служит для снижения вибрации, будучи пассивно управляемым в соответствии с введением вибрации с внешней стороны. Согласно изобретению, такой груз приспосабливают для функционирования в качестве противовеса, который активно совершает возвратно-поступательные движения в направлении, противоположном движению бойка. Таким образом, в механизированном инструменте можно обеспечить эффективный механизм снижения вибрации.
В режиме управления под нагрузкой, при котором нагрузку, связанную с предварительно определенным действием, прикладывают к головке инструмента, предпочтительно можно позволять управлять грузом колеблющимся давлением, создаваемым в приводном механизме. С другой стороны, в режиме управления без нагрузки, в котором нагрузку, связанную с предварительно определенным действием, к головке инструмента не прикладывают, можно предотвращать управление грузом колеблющимся давлением, создаваемым в приводном механизме. При такой конструкции в режиме управления под нагрузкой, в котором весьма желательно снижение вибрации, груз средства динамического снижения вибрации можно принудительно и активно приводить в действие, используя колебания давления, образующиеся в приводном механизме, так, чтобы можно было эффективно достигать снижения вибрации механизированного инструмента. Дополнительно в режиме управления без нагрузки, в котором снижение вибрации так сильно не требуется, можно предотвращать активное приведение в действие груза средства динамического снижения вибрации так, чтобы предотвращать образование вибрации механизированного инструмента грузом.
Средство динамического снижения вибрации предпочтительно может содержать первую приводную камеру и вторую приводную камеру, которые образованы с обеих сторон груза внутри корпуса. По меньшей мере в режиме управления под нагрузкой колеблющееся давление, создаваемое в приводном механизме, вводится в первую приводную камеру, а вторая приводная камера может быть связана с внешним пространством.
В этой конструкции в режиме управления под нагрузкой груз средства динамического снижения вибрации приводят в действие введением колеблющегося давления приводного механизма в первую приводную камеру так, чтобы средство динамического снижения вибрации могло функционировать как активный механизм снижения вибрации. В этом случае вторую приводную камеру в корпусе можно соединить с внешним пространством. При таком расположении предотвращаются помехи для перемещения груза в корпусе, создаваемые расширением или сжатием (обычно адиабатическим расширением или сжатием) второй приводной камеры, связь которой с внешним пространством нарушена. Таким образом, можно обеспечить ровное и быстрое движение груза в корпусе.
Чтобы дополнительно обеспечить элемент для снижения вибрации с помощью амортизации в средстве динамического снижения вибрации, можно предпочтительно загрузить соответственно в первую и вторую приводные камеры текучую среду типа воздуха или масла.
Приводной механизм предпочтительно может содержать поршень и цилиндр, которые скользят друг относительно друга в осевом направлении головки инструмента. Головка инструмента совершает возвратно-поступательное движение в своем осевом направлении под действием пневматической пружины, которое вызвано относительным перемещением поршня и цилиндра. Груз средства динамического снижения вибрации располагают вдоль периферийной поверхности цилиндра и он может скользить в осевом направлении головки инструмента. Чтобы расположить груз по периферийной поверхности, груз можно расположить полностью или частично вокруг внешней периферийной поверхности цилиндра. Таким образом, груз располагают вдоль периферийной поверхности цилиндра и его можно заставить совершать возвратно-поступательное движение скольжения по цилиндру. Таким образом, можно достигнуть миниатюризации механизированного инструмента.
Помимо этого, характерный механизированный инструмент предпочтительно может содержать цилиндр, приспособленный и устроенный для перемещения между первым положением около держателя инструмента и вторым положением, отдаленным от держателя инструмента по сравнению с первым положением. И в режиме управления под нагрузкой, в котором нагрузку, связанную с предварительно определенным действием, прикладывают к головке инструмента, цилиндр может перемещаться во второе положение, чтобы позволить управлять грузом посредством колеблющегося давления внутри камеры кривошипа. Иначе в режиме управления без нагрузки, в котором нагрузку, связанную с предварительно определенным действием, не прикладывают к головке инструмента, цилиндр может перемещаться в первое положение, чтобы препятствовать управлению грузом посредством колеблющегося давления внутри камеры кривошипа.
При такой конструкции можно достигнуть управления переключением между состоянием вынужденной вибрации и состоянием блокированной вынужденной вибрации посредством перемещения цилиндра между первым положением и вторым положением. В состоянии вынужденной вибрации груз средства динамического снижения вибрации активно приводят в действие в режиме управления под нагрузкой. С другой стороны, в состоянии блокированной вынужденной вибрации груз средства динамического снижения вибрации активно не приводят в действие в режиме управления без нагрузки. Цилиндр является уже имеющейся компонентной частью механизированного инструмента, который вмещает боек. Поэтому количество деталей механизированного инструмента можно уменьшить, а конструкцию можно сделать более простой. Способ "обеспечения возможности управлять грузом, колеблющимся под давлением внутри камеры кривошипа" в этом изобретении означает способ введения колеблющегося давления камеры кривошипа в корпус средства динамического снижения вибрации. Способ "предотвращения приведения в действие груза" обычно означает способ предотвращения колебания давления внутри камеры кривошипа, но также и соответствующим образом охватывает способ предотвращения введения колеблющегося давления камеры кривошипа в корпус средства динамического снижения вибрации.
Цилиндр предпочтительно может иметь камеру пневматической пружины, которая заставляет боек совершать возвратно-поступательное движение. Действие пневматической пружины может быть вызвано сжатием приводным механизмом. В режиме управления под нагрузкой, в котором нагрузку, связанную с предварительно определенным действием, прикладывают к головке инструмента, цилиндр перемещается во второе положение, таким образом позволяя приводить боек под действием пневматической пружины в камере пневматической пружины. В режиме управления без нагрузки, при котором нагрузку, связанную с предварительно определенным действием, не прикладывают к головке инструмента, цилиндр перемещается в первое положение, таким образом препятствуя приведение бойка под действием пневматической пружины в камере пневматической пружины.
В режиме управления под нагрузкой предпочтительно можно позволить управлять грузом посредством колеблющегося давления внутри камеры кривошипа с временной задержкой после того, как обеспечивают возможность управлять бойком под действием пневматической пружины в камере пневматической пружины. В фактическом режиме управления под нагрузкой головки инструмента, после того, как пространство внутри камеры пневматической пружины начинает подвергаться сжатию с помощью приведения в действие приводного механизма, боек начинает перемещаться посредством давления сжатия с небольшой временной задержкой (временем сжатия, требуемым для фактического действия пневматической пружины на боек). В противном случае боек начинает линейно перемещаться к головке инструмента с небольшой временной задержкой, обусловленной силой инерции бойка или других аналогичных факторов. Поэтому вынужденная вибрация средства динамического снижения вибрации может начаться с временной задержкой после отключения предотвращения холостого ударного действия. Таким образом, грузом средства динамического снижения вибрации можно управлять с синхронизацией движения так, что груз начинает линейно перемещаться в направлении, противоположном движению бойка. В результате можно соответствующим образом выполнять функцию снижения вибрации.
Механизированный инструмент предпочтительно может дополнительно содержать вентиляционное отверстие, которое может соединять камеру кривошипа с внешним пространством. Когда цилиндр перемещается во второе положение, вентиляционное отверстие закрывается, таким образом позволяя приводить груз в действие. Когда цилиндр перемещается в первое положение, вентиляционное отверстие открывается, тем самым предотвращая приведение в действие груза. Таким образом, при конструкции, в которой вентиляционное отверстие открывается и закрывается при движении цилиндра, цилиндр и периферийный участок вокруг цилиндра, в котором скользит цилиндр, могут определять уплотняющую поверхность. В результате можно обеспечить достаточное уплотнение так, чтобы можно было улучшить эффективность вынужденной вибрации средства динамического снижения вибрации. Помимо этого, с конструкцией, в которой камера кривошипа соединена с наружной стороной во время режима управления без нагрузки, можно избежать колебаний давления внутри камеры кривошипа и сопротивления, вызываемого увеличением давления. Таким образом, можно предотвратить бесполезное потребление энергии.
Механизированный инструмент предпочтительно может дополнительно содержать вентиляционное отверстие, которое может соединять камеру пневматической пружины с внешним пространством. Вентиляционное отверстие закрывается, когда цилиндр перемещается во второе положение, и вентиляционное отверстие открывается, когда цилиндр перемещается в первое положение. При такой конструкции, когда вентиляционное отверстие открывается, камера пневматической пружины соединяется с внешним пространством. Таким образом, давление внутри камеры пневматической пружины не меняется, даже если приводной механизм приводят в действие. В результате приводной механизм работает в режиме холостого хода так, что можно предотвращать холостые удары головки инструмента, а именно ударное действие, когда головка инструмента не входит в контакт с обрабатываемой деталью. С другой стороны, когда вентиляционное отверстие закрыто, соединение камеры пневматической пружины с внешним пространством прерывается, обеспечивая возможность колебания давления камеры пневматической пружины. Таким образом, предотвращение холостого ударного действия отключается и боек можно приводить в действие посредством функционирования пневматической пружины. При такой конструкции можно достигнуть и переключения между вынужденной вибрацией и ее отключением, и переключения между предотвращением холостого ударного действия головки инструмента и его отключением, используя перемещение одного цилиндра. Таким образом, молоток может иметь значительно более простую конструкцию.
Краткое описание чертежей
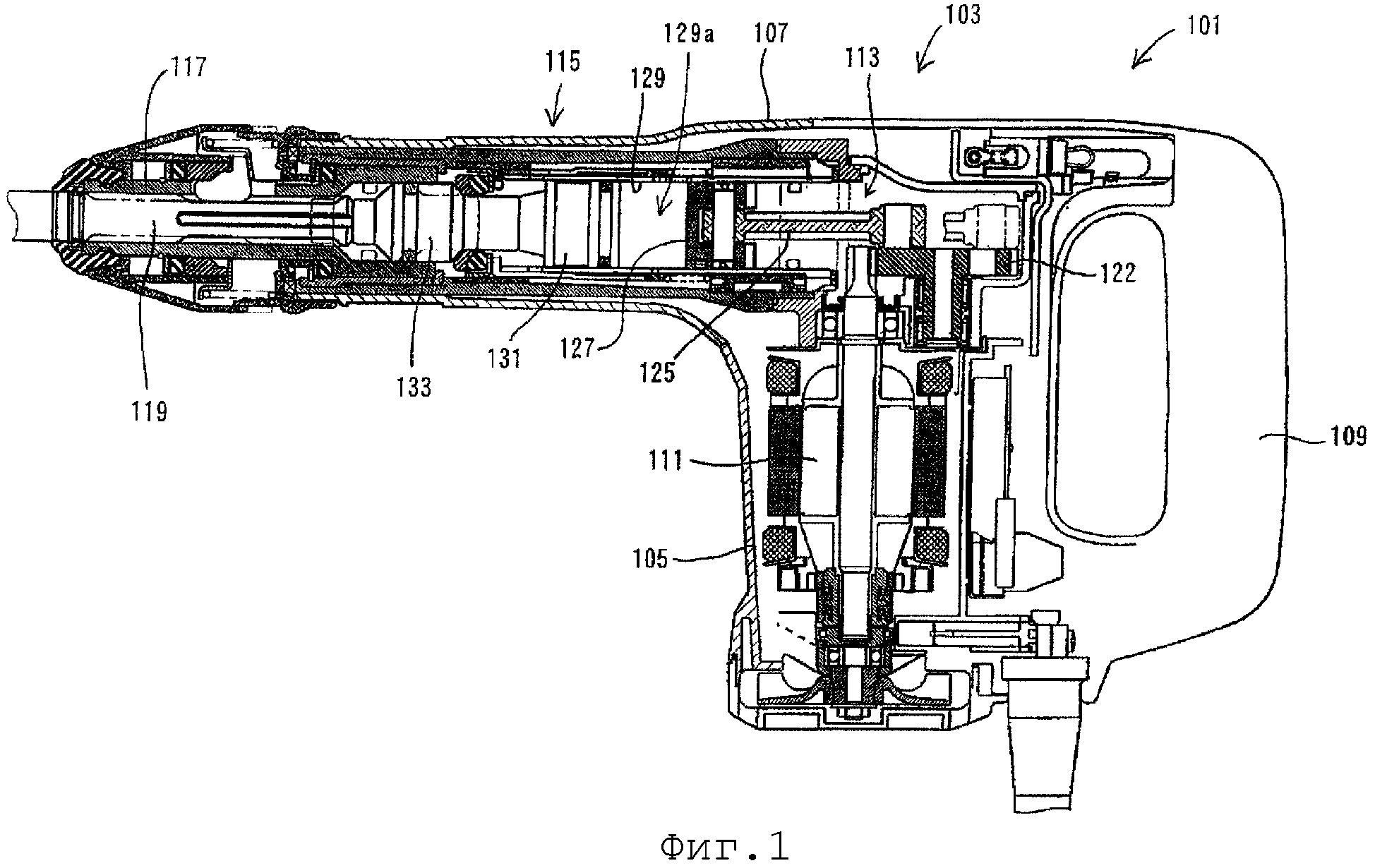
Фиг.1 представляет общий вид в разрезе, изображающий молоток согласно первому варианту осуществления изобретения.
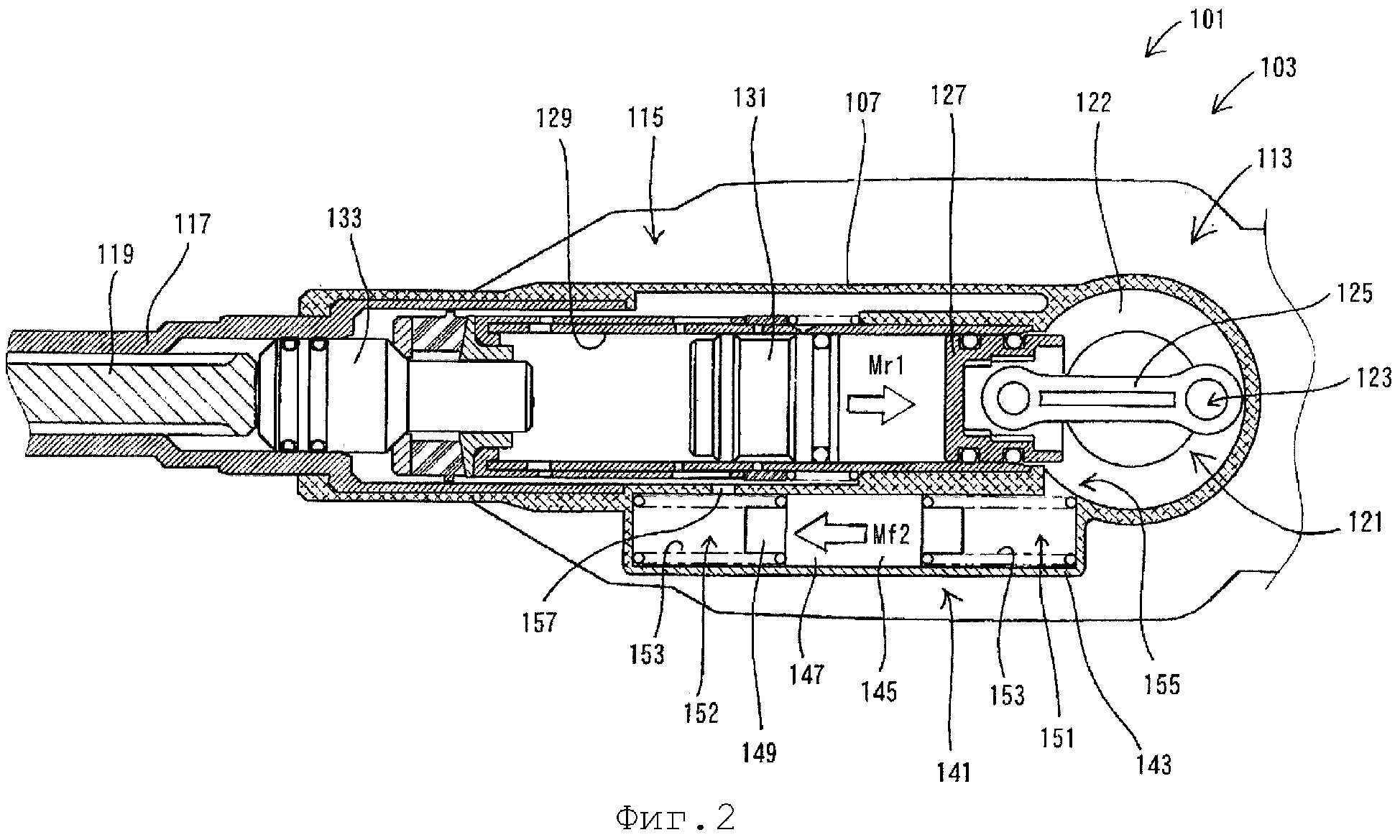
Фиг.2 представляет вид сверху в разрезе существенной части электрического молотка согласно первому варианту осуществления, изображающий поршень в мертвой точке положения отсутствия сжатия.
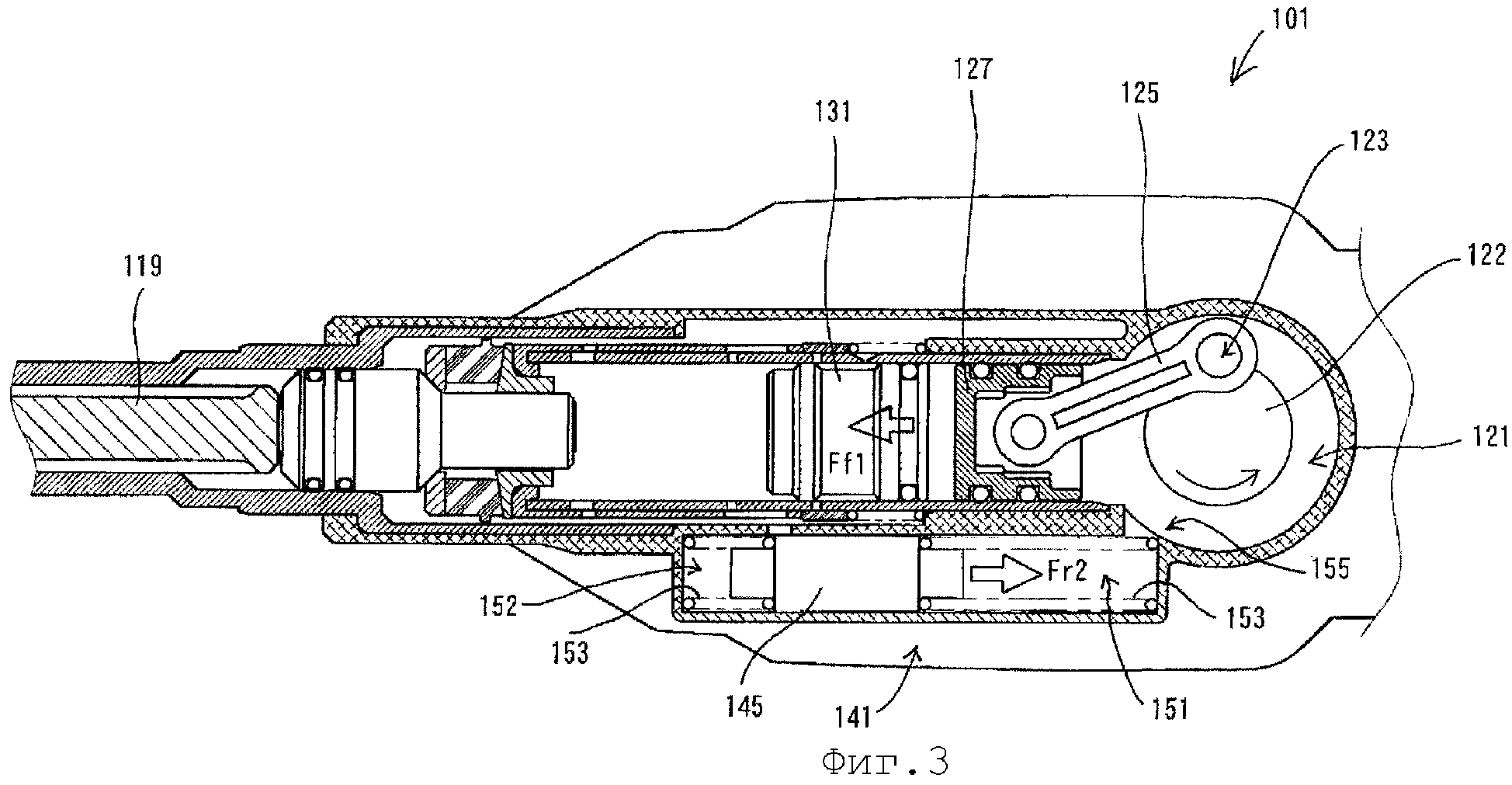
Фиг.3 также представляет вид сверху в разрезе электрического молотка согласно первому варианту осуществления, изображающий поршень, начинающий перемещаться из положения, показанного на фиг.2, в положении сжатия.
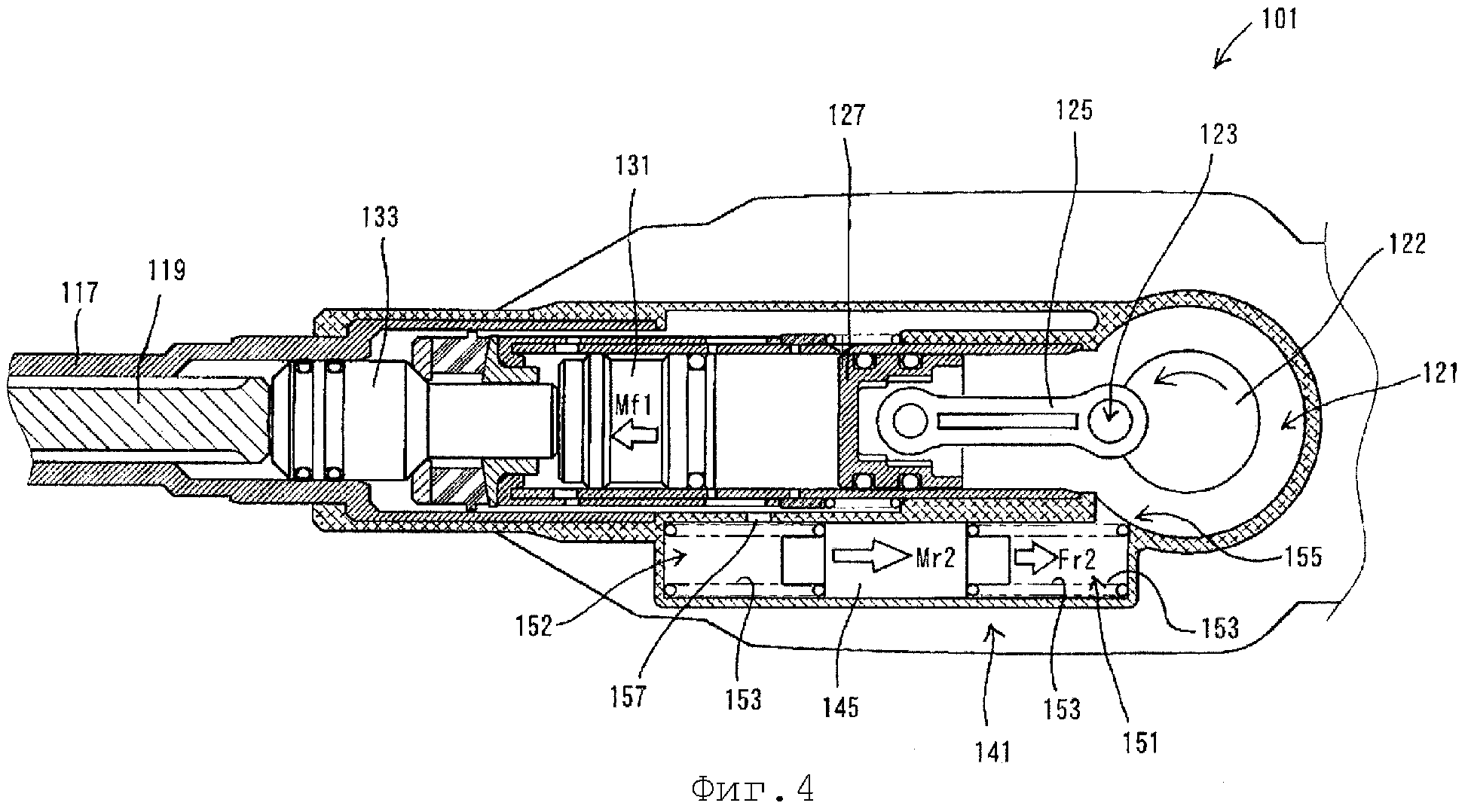
Фиг.4 изображает поршень, перемещающийся к мертвой точке положения сжатия.
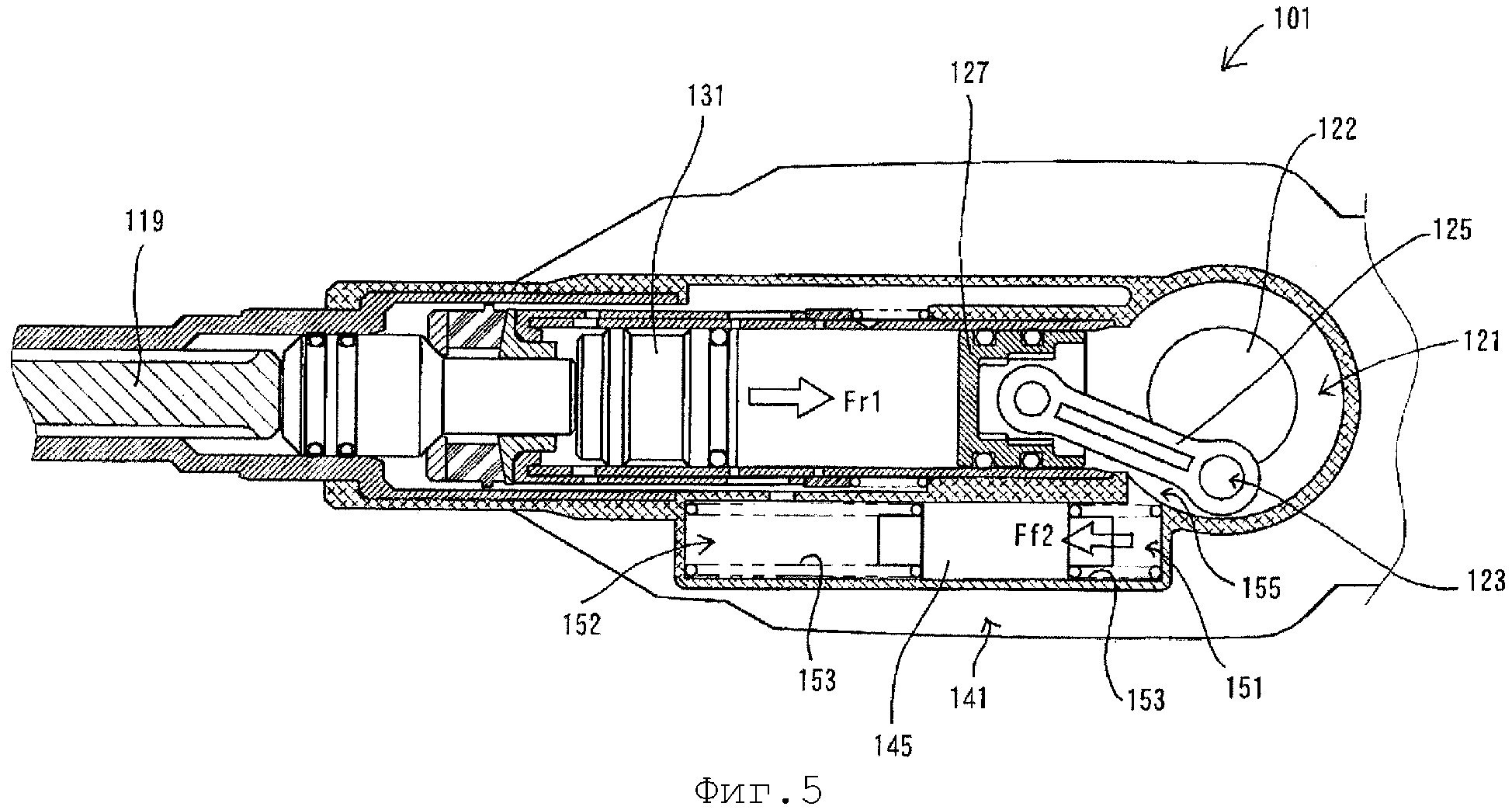
Фиг.5 изображает поршень, начинающий перемещаться из мертвой точки положения сжатия к мертвой точке положения отсутствия сжатия.
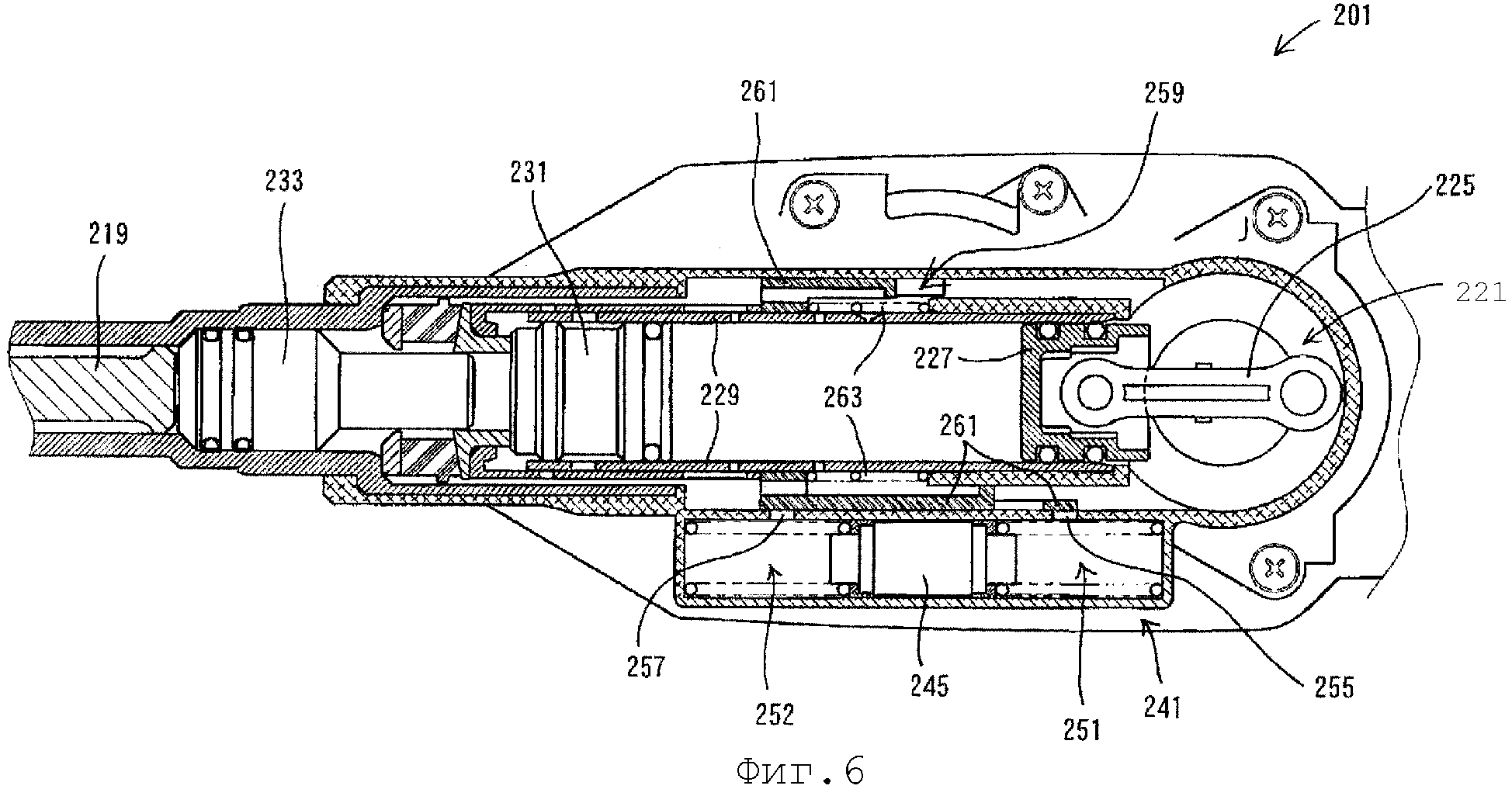
Фиг.6 изображает существенную часть электрического молотка согласно второму варианту осуществления изобретения в режиме управления без нагрузки.
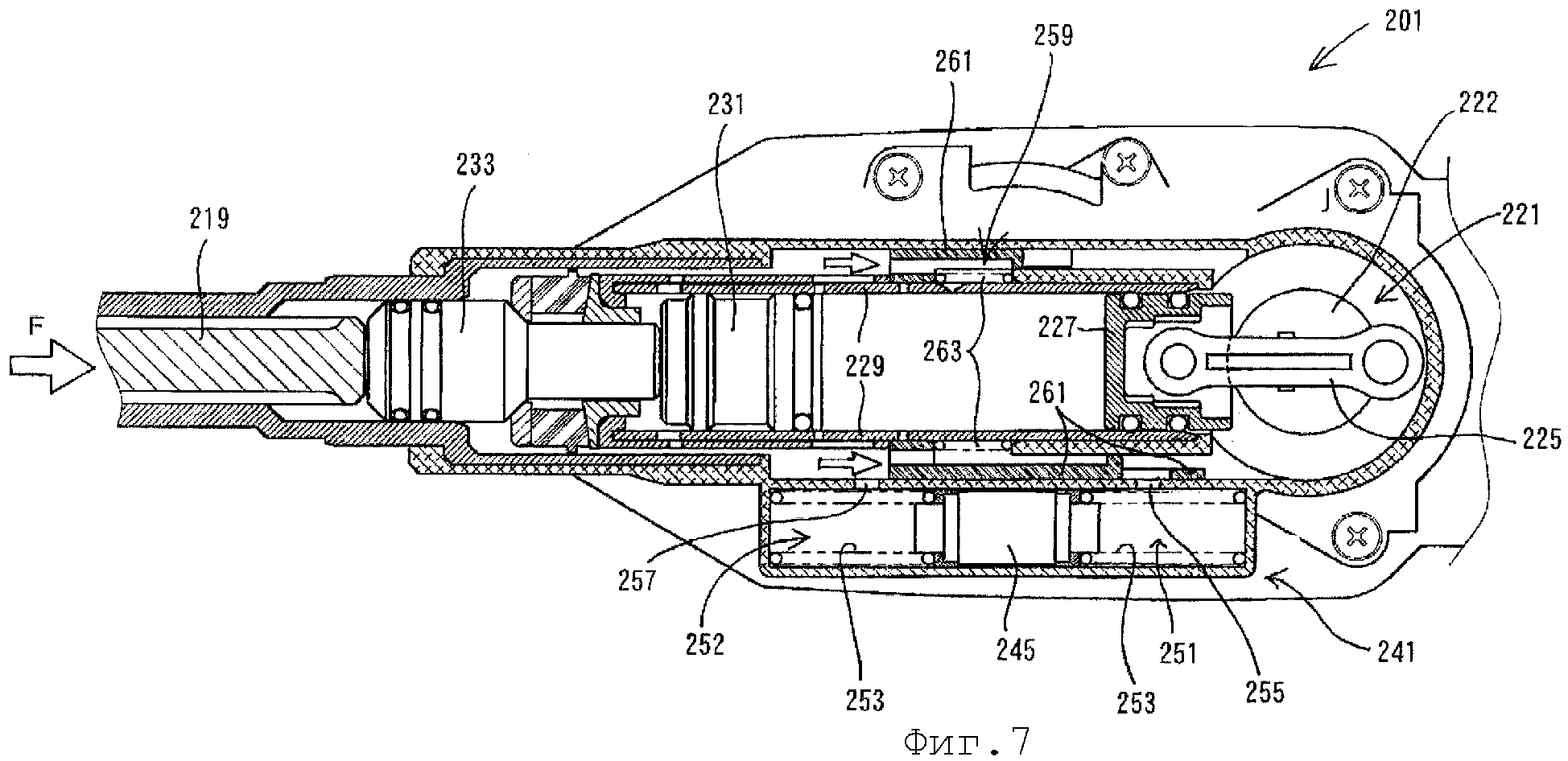
Фиг.7 также изображает существенную часть электрического молотка согласно второму варианту осуществления изобретения в режиме управления под нагрузкой.
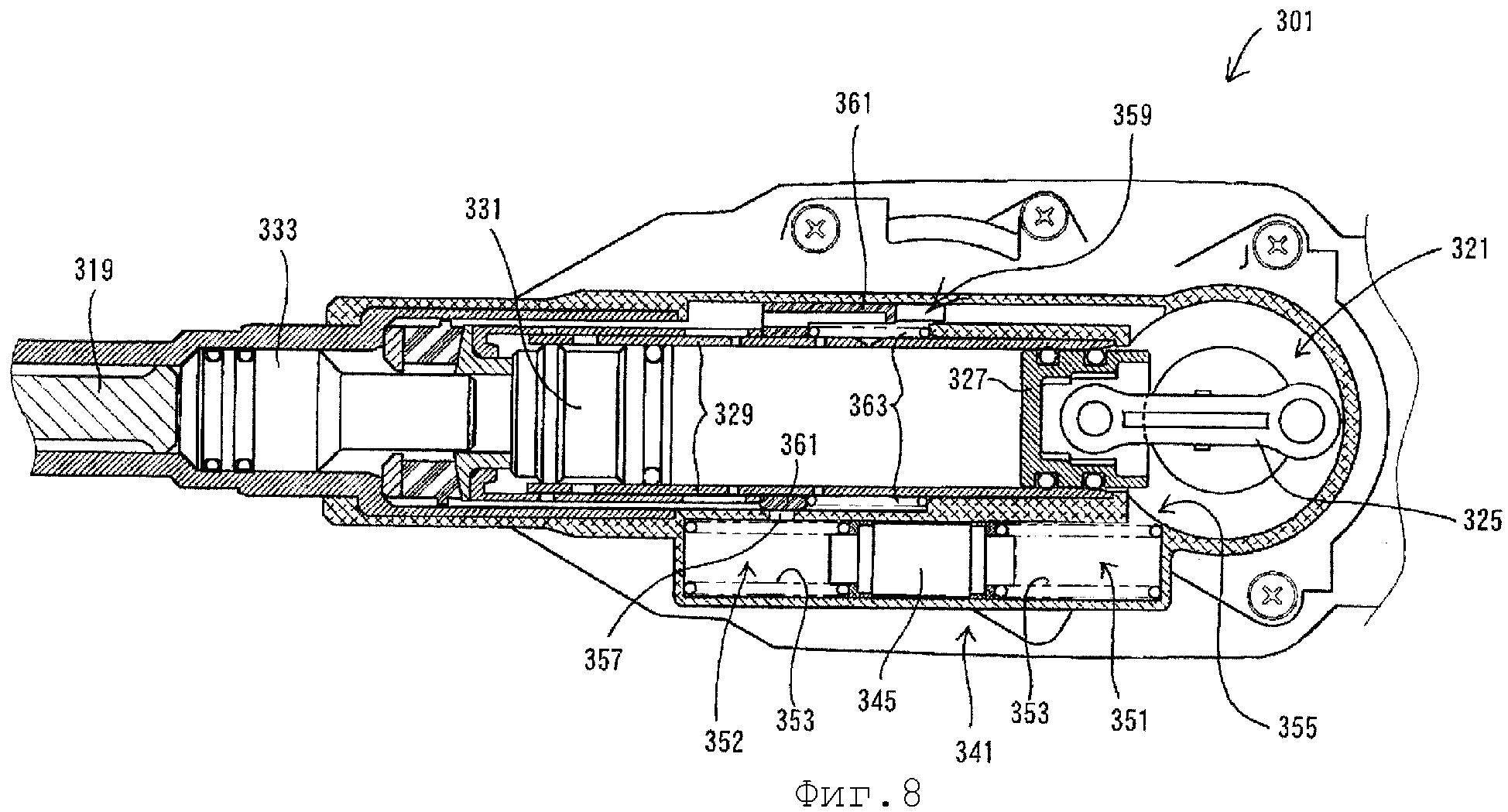
Фиг.8 изображает существенную часть электрического молотка согласно третьему варианту осуществления изобретения в режиме управления без нагрузки.
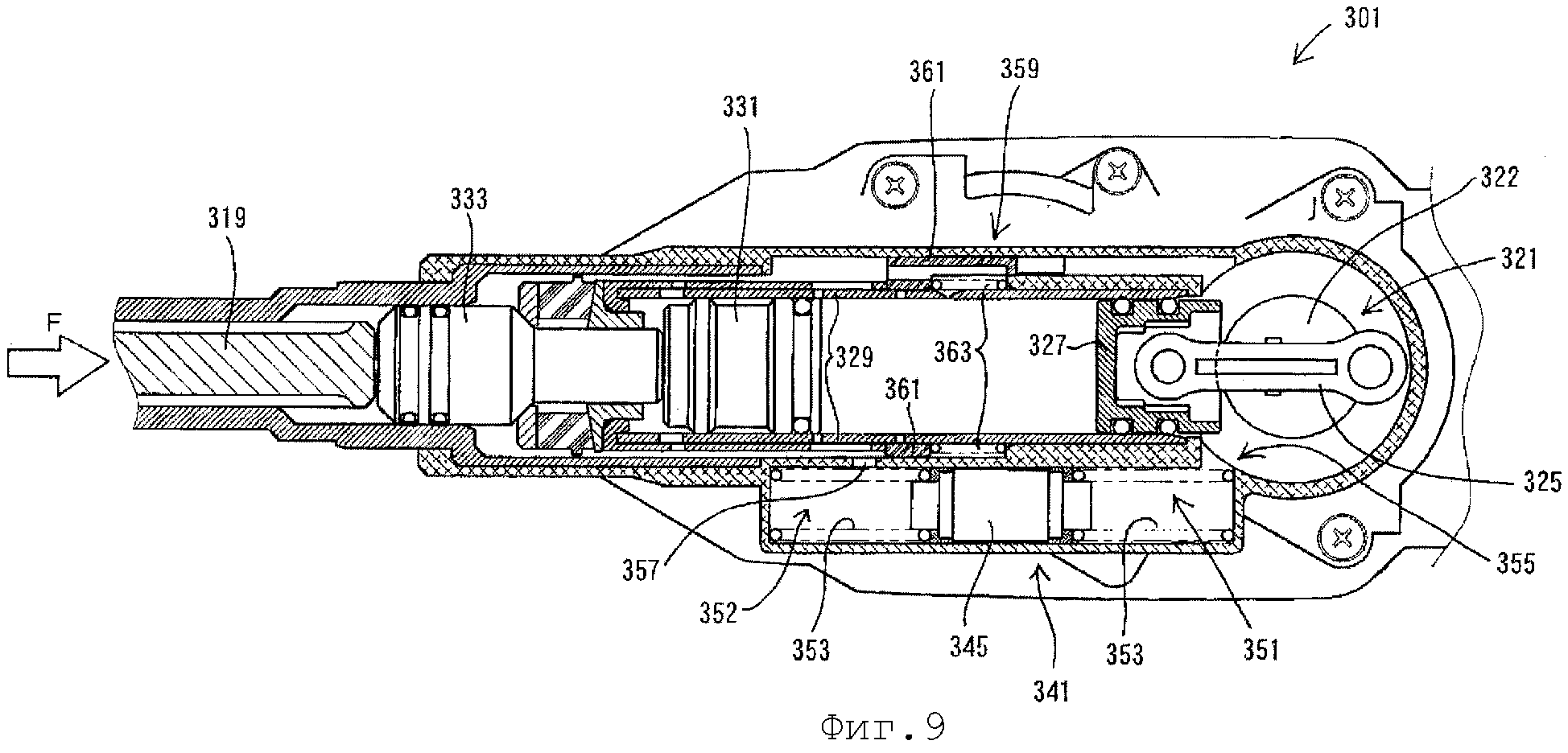
Фиг.9 также изображает существенную часть электрического молотка согласно третьему варианту осуществления в режиме управления под нагрузкой.
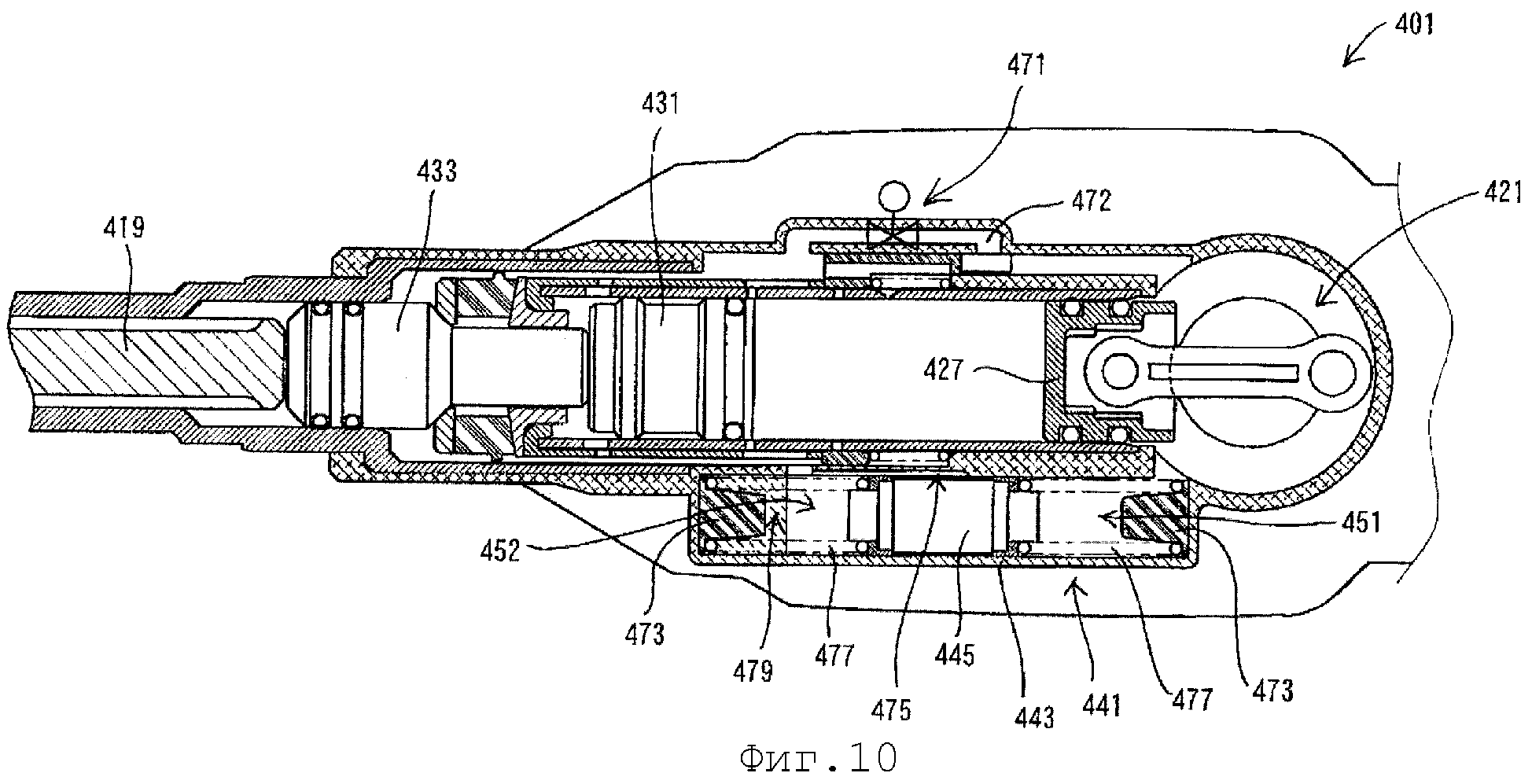
Фиг.10 изображает существенную часть электрического молотка четвертого варианта осуществления изобретения.
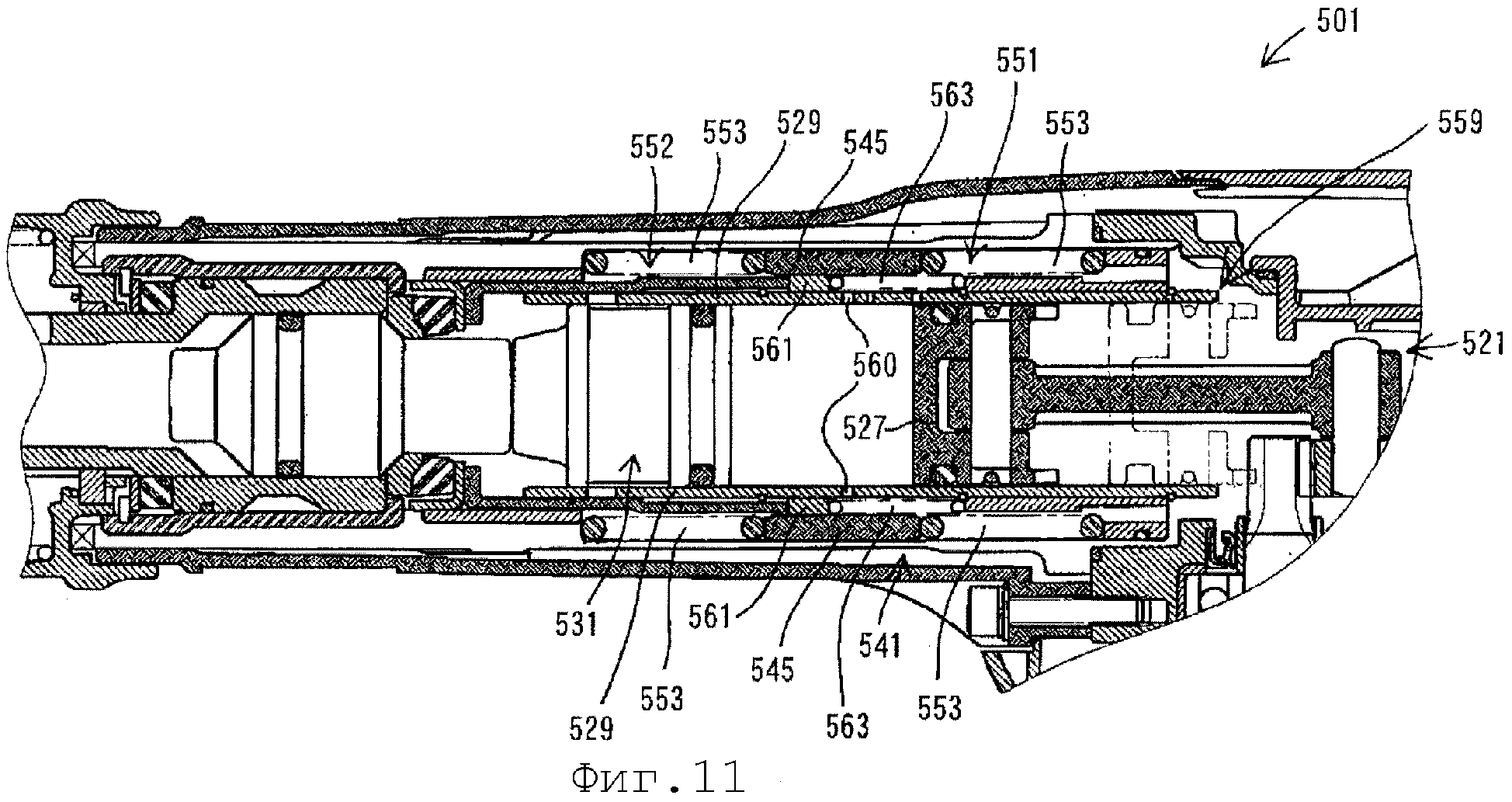
Фиг. 11 изображает существенную часть электрического молотка согласно пятому варианту осуществления изобретения в режиме управления без нагрузки.
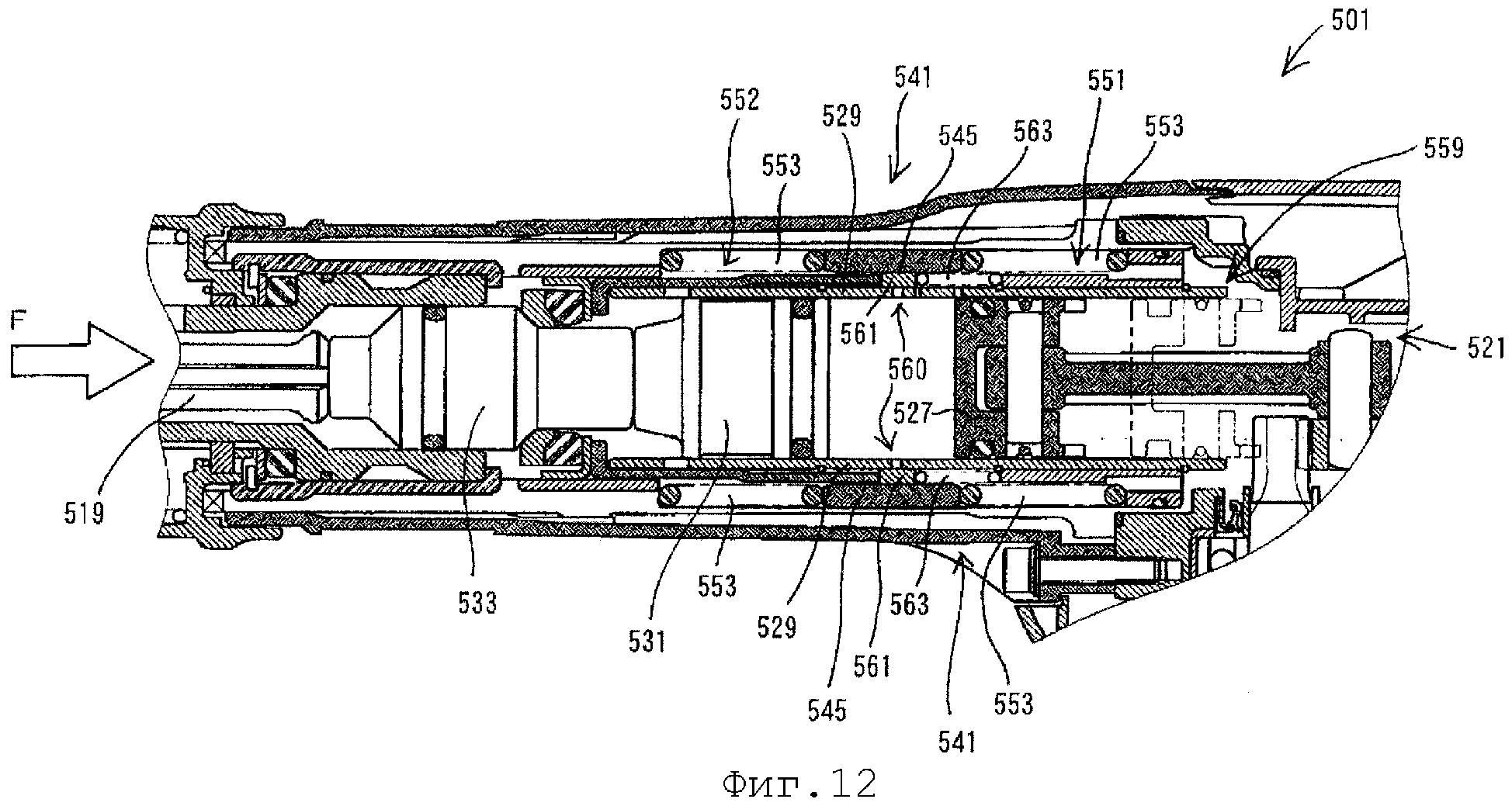
Фиг.12 изображает существенную часть электрического молотка согласно пятому варианту осуществления в режиме управления под нагрузкой.
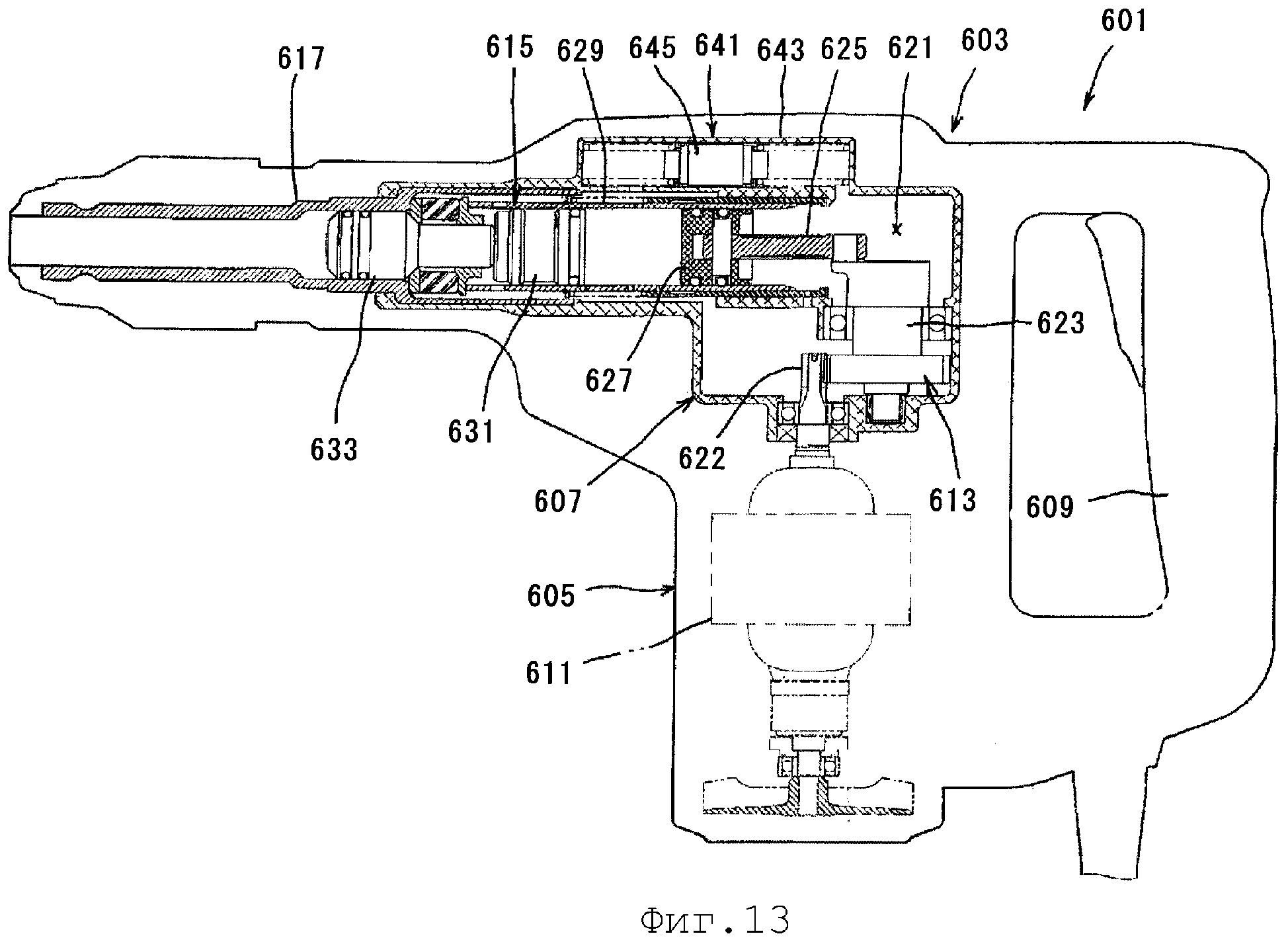
Фиг.13 представляет общий вид сбоку в разрезе, изображающий молоток согласно шестому варианту осуществления изобретения.
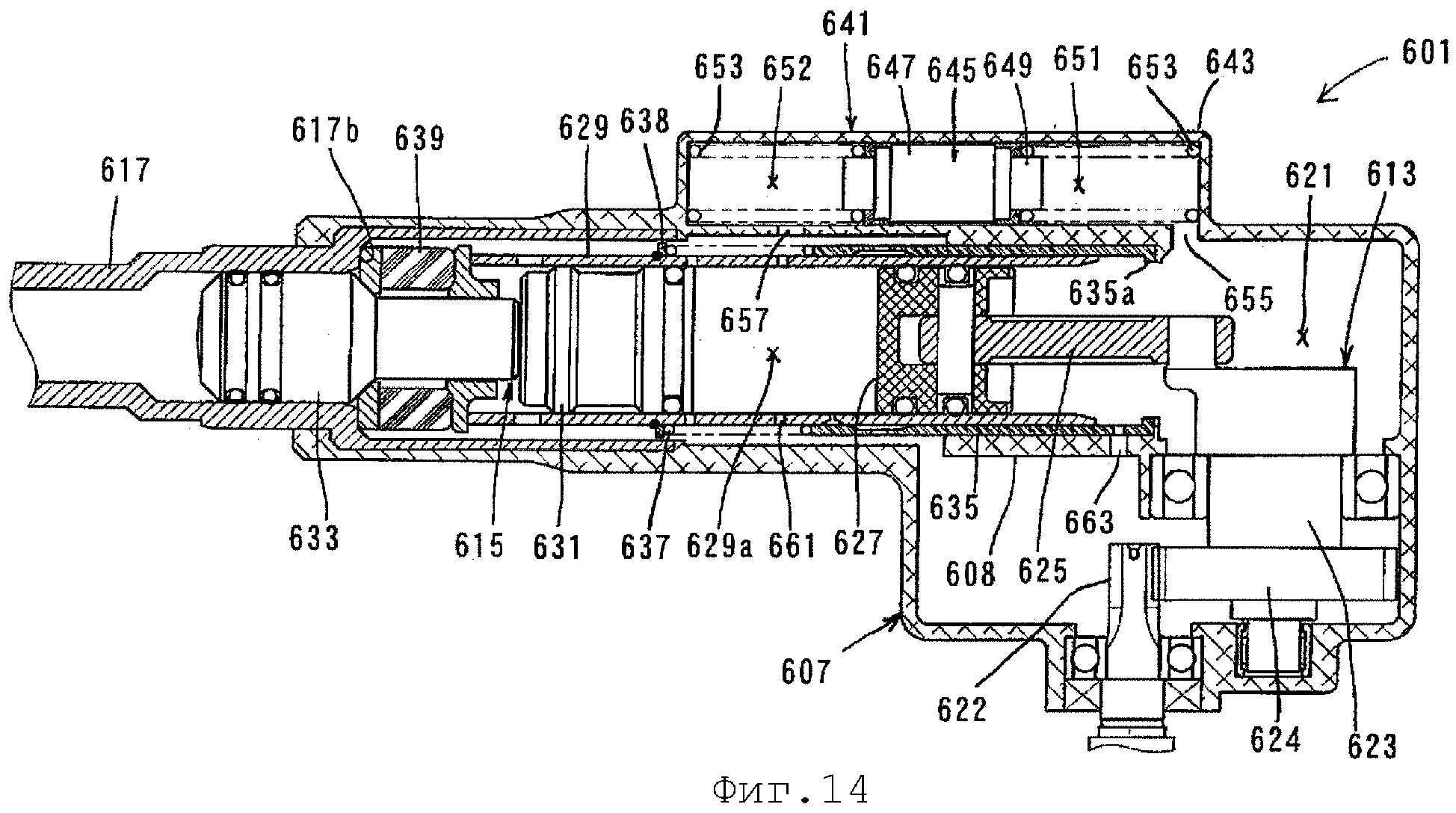
Фиг.14 представляет вид сбоку в разрезе существенной части молотка согласно шестому варианту осуществления в режиме управления без нагрузки.
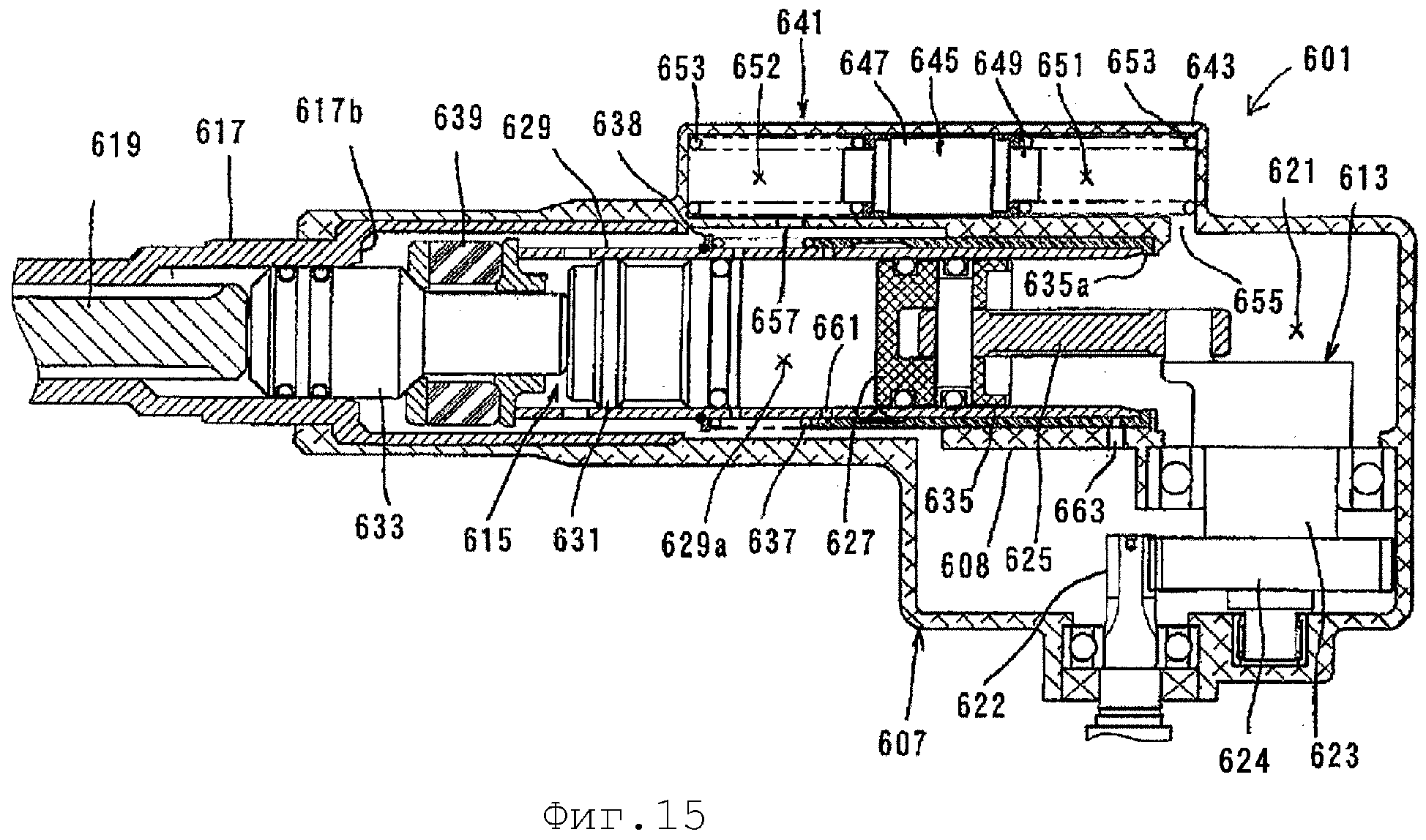
Фиг.15 представляет вид сбоку в разрезе существенной части молотка согласно шестому варианту осуществления в режиме управления под нагрузкой.
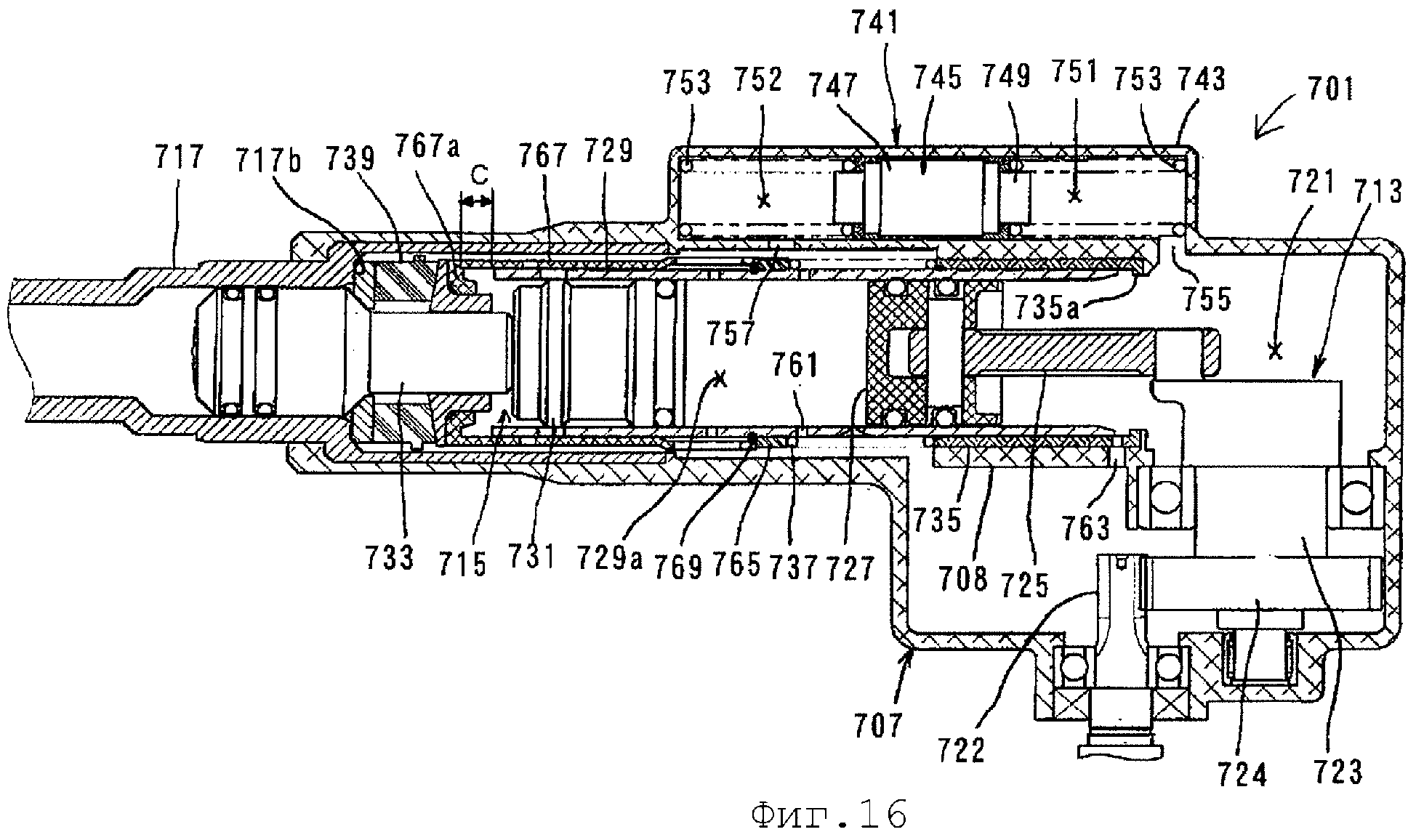
Фиг.16 представляет общий вид сбоку в разрезе, изображающий молоток согласно седьмому варианту осуществления изобретения.
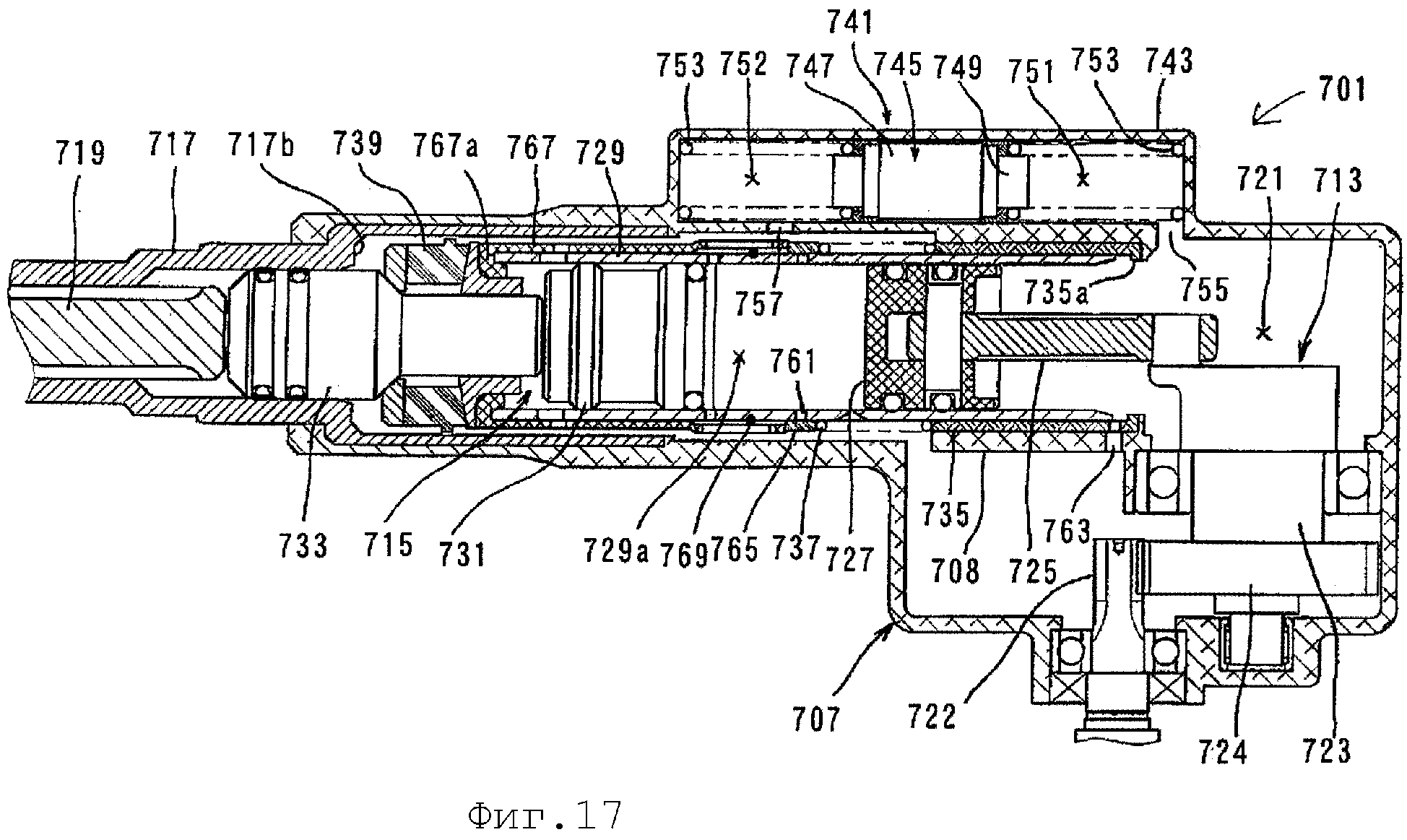
Фиг.17 представляет вид сбоку в разрезе существенной части молотка согласно седьмому варианту осуществления изобретения, изображающий состояние, в котором предотвращение холостого ударного действия отключено в режиме управления под нагрузкой.
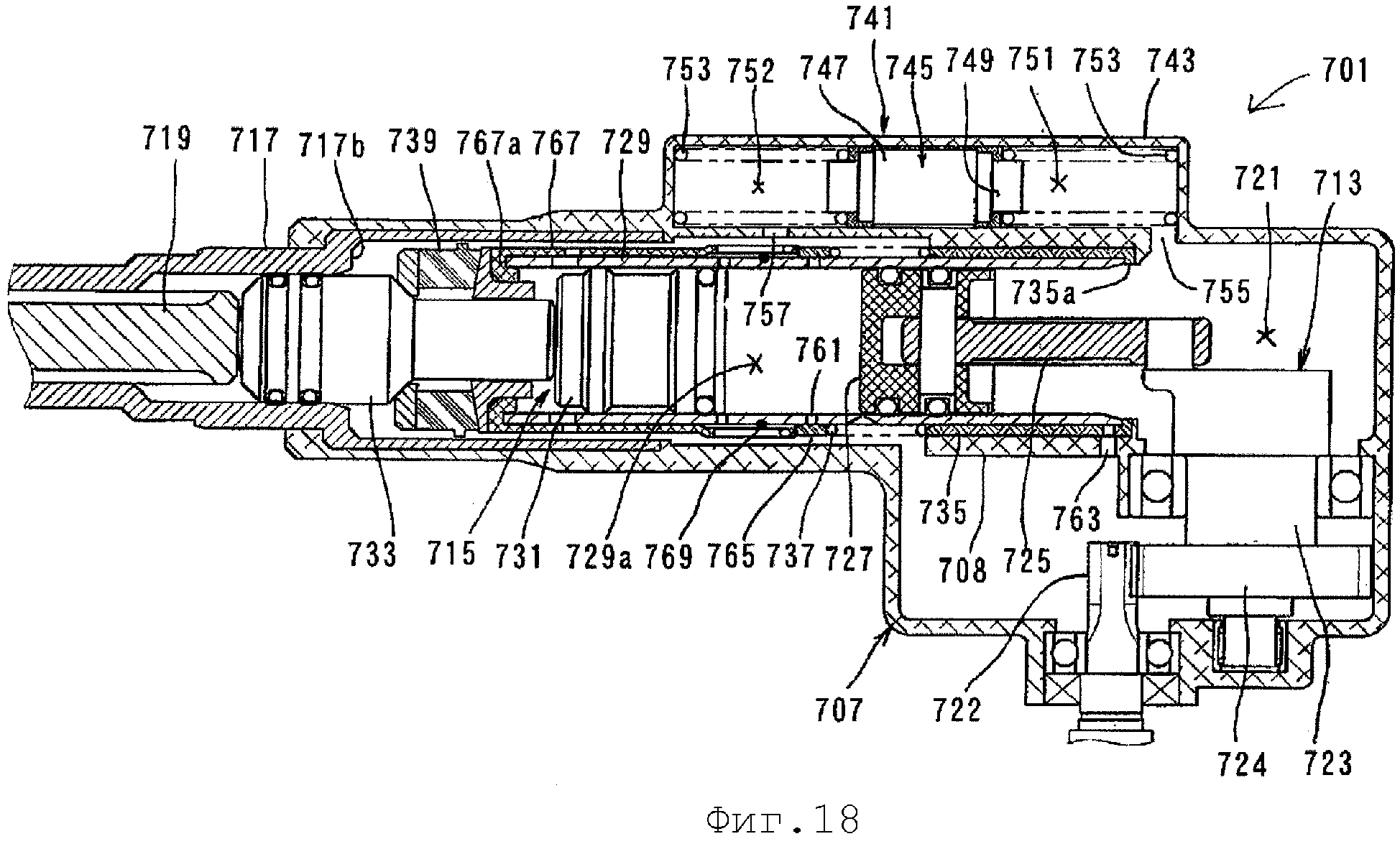
Фиг.18 представляет вид сбоку в разрезе существенной части молотка согласно седьмому варианту осуществления изобретения в режиме управления под нагрузкой.
Подробное описание предпочтительного варианта осуществления изобретения
(Первый вариант осуществления)
Теперь будет описан первый вариант осуществления настоящего изобретения со ссылкой на фиг.1-5. Электрический молоток поясняется как характерный пример механизированного инструмента согласно настоящему изобретению. Как показано на фиг.1, характерный электрический молоток 101 согласно этому варианту осуществления содержит корпус 103, держатель 117 инструмента, соединенный с областью окончания наконечника корпуса 103, и головку 119 молотка, которая съемным образом присоединена к держателю 117 инструмента. Головка 119 молотка соответствует "головке инструмента" согласно настоящему изобретению.
Корпус 103 содержит кожух 105 двигателя, который вмещает приводной электродвигатель 111, кожух 107 устройства, который вмещает механизм 113 преобразования движения и ударный элемент 115 и рукоятку 109. Механизм 113 преобразования движения приспособлен для соответствующего преобразования выходной мощности вращения приводного электродвигателя 111 в линейное движение ударного элемента 115. В результате в осевом направлении головки 119 молотка вырабатывается сила удара посредством ударного элемента 115. Электрический молоток 101 можно сконструировать так, что его можно переключать в режим молоткового перфоратора, в котором ударное действие в осевом направлении головки 119 молотка и действие сверления в периферийном направлении можно выполнять в одно и то же время.
Фиг.2 изображает детализированную конструкцию механизма 113 преобразования движения и ударного элемента 115 электрического молотка 101. Фиг.2 схематично изображает вид сверху существенной части электрического молотка 101. Механизм 113 преобразования движения включает в себя ведущую шестерню 122, вал 123 эксцентрика и плечо 125 кривошипа. Ведущая шестерня 122 вращается в горизонтальной плоскости приводным электродвигателем 111 (см. фиг.1). Вал 123 эксцентрика расположен в положении, смещенном от центра вращения ведущего механизма 122. Один конец плеча 125 кривошипа соединен с валом 123 эксцентрика, а другой конец без сцепления соединен с приводным элементом 127. Ведущая шестерня 122, вал 123 эксцентрика и плечо 125 кривошипа расположены внутри камеры 121 кривошипа. Камеру 121 кривошипа образуют так, что она по существу уплотнена от внешнего пространства уплотняющей структурой, которая подробно не показана, и так, что ее эффективный рабочий объем может увеличиваться и уменьшаться в соответствии с движением приводного элемента 127, которое вызывается плечом 125 кривошипа. Плечо кривошипа 125 и приводной элемент 127 образуют конструкцию, которая соответствует "кривошипно-шатунному механизму" согласно настоящему изобретению. Дополнительно приводной элемент 127 соответствует "поршню" согласно настоящему изобретению.
Ударный механизм 115 главным образом включает в себя боек 131 и ударный затвор 133. Боек 131 скользящим образом располагают внутри отверстия цилиндра 129 вместе с приводным элементом 127. Ударный затвор 133 скользящим образом располагают внутри держателя 117 инструмента и приспосабливают для передачи кинетической энергии бойка 131 головке 119 молотка.
Дополнительно, как показано на фиг.2, молоток 101 содержит средство 141 динамического снижения вибрации, которое соединено с корпусом 103. Средство 141 динамического снижения вибрации главным образом содержит цилиндрический корпус 143, который располагают рядом с корпусом 103, груз 145, который располагают внутри цилиндрического корпуса 143, и смещающие пружины, которые располагают с правой и левой сторон от груза 145. Смещающие пружины 153 прикладывают силу смещения к грузу 145 в направлении друг к другу, когда груз 145 перемещается в осевом направлении цилиндрического корпуса 143 (в осевом направлении головки 119 молотка). Первая приводная камера 151 и вторая приводная камера 152 образованы с обеих сторон от груза 145 внутри цилиндрического корпуса 143. Первая приводная камера 151 соединена с приводной камерой 121 кривошипа через первую соединительную часть 155. Вторая приводная камера 152 соединена с наружной стороной средства 141 динамического снижения вибрации (атмосферой) через вторую соединительную часть 157.
Груз 145 имеет часть 147 большого диаметра и часть 149 меньшего диаметра, проходящую непрерывно с частью 147 большого диаметра. Размеры груза 145 в конструкции можно отрегулировать соответствующим образом, определяя по выбору конфигурацию и осевую длину части 147 большого диаметра и части 149 меньшего диаметра. Таким образом, груз 145 в целом можно сделать меньшим. Дополнительно, груз 145 удлинен в направлении его движения, и каждая смещающая пружина 153 плотно установлена вокруг части 149 меньшего диаметра так, чтобы движение груза 145 в осевом направлении головки 119 молотка было устойчивым.
Хотя средство 141 динамического снижения вибрации в настоящем варианте осуществления прочно соединено с корпусом 103 (кожухом 107 устройства) и, таким образом, целиком смонтировано на электрическом молотке 101, его можно сконструировать отсоединяемым от корпуса 103.
Теперь объясним действие молотка 101, сконструированного, как описано выше. Когда приводной электродвигатель 111 (изображенный на фиг.1) приводят в действие, выходная мощность вращения приводного электродвигателя 111 приводит ведущую шестерню 122 (изображенную на фиг.2) во вращение в горизонтальной плоскости. Когда ведущая шестерня 122 вращается, вал 123 эксцентрика вращается в горизонтальной плоскости, и этот вал эксцентрика, в свою очередь, заставляет плечо 125 кривошипа качаться в горизонтальной плоскости. Затем приводной элемент 127 на конце плеча 125 кривошипа скользящим образом совершает возвратно-поступательное движение внутри отверстия цилиндра 129. Когда приводной элемент 127 совершает возвратно-поступательное движение, боек 131 совершает возвратно-поступательное движение внутри цилиндра 129 и соударяется с ударным затвором 133 на скорости, превышающей скорость приводного элемента 127, под действием пневматической пружины в результате сжатия воздуха внутри цилиндра 147 между бойком и ударным затвором. Кинетическая энергия бойка 131, которая вызывается соударением с ударным затвором 133, передается головке 119 молотка. Таким образом, на обрабатываемой детали (не показанной) выполняют ударное действие. На фиг.2 для удобства изображения приводной элемент 127 показан в отведенном назад положении в мертвой точке положения отсутствия сжатия, и таким образом боек 131, который соударяется с ударным затвором 133 и передает силу удара на головку 119 молотка, показан передвигающимся линейно от головки молотка (в направлении, показанном стрелкой Mr1 на фиг.2).
Средство 141 динамического снижения вибрации на корпусе 103 служит для уменьшения импульсной и циклической вибраций, образующихся при приведении в действие головки 119 молотка, как упомянуто выше. В частности, груз 147 и смещающие пружины 153 взаимодействуют с целью пассивного уменьшения вибрации корпуса 103, на который оказывает действие предварительно определенная внешняя сила (вибрация). Таким образом, вибрацию молотка 101 по этому варианту осуществления можно эффективно смягчать или уменьшать. Принцип снижения вибрации с помощью использования динамического средства вибрации является известной областью техники и поэтому описан подробно не будет.
Когда молоток 101 приводят в действие, рабочий объем внутри камеры 121 кривошипа изменяется, поскольку приводной элемент 127 совершает возвратно-поступательное движение в осевом направлении головки 119 молотка внутри цилиндра 129. Например, на фиг.3 показан приводной элемент 127, передвинутый на предварительно определенное расстояние к головке 119 молотка от положения, показанного на фиг.2, в мертвой точке отсутствия сжатия. На фиг.3 плечо 124 кривошипа качается в горизонтальной плоскости, когда ведущая шестерня 122 вращается против часовой стрелки, как видно на чертеже. В результате приводной элемент 127 начинает скольжение по направлению к головке 119 молотка. При этом на боек 131 в направлении к головке 119 молотка действует сила Ff1 под действием пневмобаллонной пружины между бойком 131 и приводом 127.
В это время рабочий объем внутри камеры 121 кривошипа увеличивается, а давление внутри камеры 121 кривошипа падает, когда приводной элемент 127 скользит к головке 119 молотка. Уменьшенное давление действует на первую приводную камеру 151 средства 141 динамического снижения вибрации через соединительную часть 155. В результате на груз 145 действует сила Fr2 в направлении от головки 119 молотка.
Как показано на фиг.4, когда ведущая шестерня 122 поворачивается дальше, плечо 125 кривошипа совершает дальнейшие качания в горизонтальной плоскости и приводной элемент 127 скользит дальше к головке 119 молотка до тех пор, пока не достигает мертвой точки положения сжатия. При этом боек 131 передвигается к головке 119 молотка (в направлении, показанном стрелкой Mf1) от положения, показанного на фиг.3, и соударяется с ударным затвором 133 под непрерывным воздействием пневматической пружины. В результате импульсная ударная сила передается головке 119 молотка, и головка 119 молотка совершает возвратно-поступательное движение внутри держателя 117 инструмента и таким образом выполняет ударное действие.
В это время давление внутри камеры 121 кривошипа, которое упало из-за увеличения рабочего объема внутри камеры 121 кривошипа, непрерывно прикладывают к внутреннему участку первой приводной камеры 151 от положения, показанного на фиг.3, к положению, показанному на фиг.4. Таким образом, на груз 145 непрерывно действует сила Fr2. В результате груз 145 скользит вправо, как видно на чертеже (от головки 119 молотка в направлении, показанном стрелкой Mr2), против силы смещения смещающей пружины 153. В результате этого, когда боек 131 соударяется с ударным затвором 133 и совершает возвратно-поступательное движение таким образом, что он прикладывает силу воздействия к головке 119 молотка, груз 145 совершает возвратно-поступательное движение в направлении, противоположном направлению возвратно-поступательного движения бойка 131, таким образом снижая вибрацию молотка 101.
После того, как приводной элемент 127 начинает перемещение к бойку 131, боек 131 фактически начинает перемещаться к ударному затвору 133 с небольшой временной задержкой из-за времени сжатия, требуемого для приведения в действие пневматической пружины, силы инерции бойка 131 или других подобных факторов. Поэтому определение времени для того, чтобы заставить груз 145 средства 141 динамического снижения вибрации начать линейное перемещение, предпочтительно можно выполнять соответствующим образом, например посредством регулирования силы смещения смещающей пружины 153.
Кроме того, в этом варианте осуществления, когда груз 145 перемещается линейно в направлении, противоположном направлению движения бойка 131, наружный воздух проникает во вторую камеру 152 приведения в действие через вторую соединительную часть 157 второй камеры 152 приведения в действие. Таким образом, можно эффективно предотвращать препятствование линейному перемещению груза 145 из-за расширения внутреннего пространства второй приводной камеры 152, находящегося в состоянии, в котором наружный воздух не может туда проникать (адиабатическое расширение), когда груз 145 перемещается право, как видно на чертеже.
Далее, когда груз 145 перемещается вправо, как видно на чертеже, рабочий объем внутри первой приводной камеры 151 уменьшается, а давление внутри камеры 121 кривошипа увеличивается посредством первой соединительной части 155. Ее можно расположить и сконфигурировать так, чтобы эффективный рабочий объем камеры 121 кривошипа увеличивался фактически на незначительную величину. Или ее можно расположить и сконфигурировать так, чтобы вышеописанное увеличение давления вызывало действие торможения при перемещении Mr2 груза 145 с целью предотвращения столкновения груза 145 с торцом первой камеры 151 приведения в действие.
Когда ведущая шестерня 122 далее поворачивается из положения, при котором приводной элемент 127 расположен в мертвой точке положения сжатия, как показано на фиг.4, приводной элемент 127 перемещается от головки 119 молотка. В результате, как показано на фиг.5, сила Fr1 действует на боек 131 в направлении от головки 119 молотка с помощью пневматической пружины, действующей в положении расширения. При этом, поскольку рабочий объем внутри камеры 121 кривошипа уменьшается, а давление внутри камеры 121 кривошипа растет, на груз 145 средства 141 динамического снижения вибрации действует сила Ff2 в направлении к головке 119 молотка под действием колеблющегося давления, которое прикладывают к первой приводной камере 151 через соединительную часть 155. Как описано выше, из-за времени, требуемого для приведения в действие пневматической пружины, инерционной силы бойка 131 или других подобных факторов боек 131 начинает перемещаться линейно с небольшой временной задержкой после того, как приводной элемент 127 начинает передвигаться от головки 119 молотка. В результате в процессе, когда приводной элемент 127 передвигается из положения, показанного на фиг.5, к мертвой точке несжатого состояния, показанной на фиг.2, боек 131 начинает линейное движение Mr1 в направлении от головки 119 молотка (см. фиг.2). В то же время, груз 145 средства 141 динамического снижения вибрации начинает линейное движение Mf2 в направлении, противоположном направлению линейного движения бойка 131. В результате даже когда боек 131 отведен назад, механизм снижения вибрации эффективно функционирует с помощью активного приведения в действие груза 145.
Когда груз 145 линейно перемещается влево, как показано на чертеже (см. фиг.2), наружный воздух проникает во вторую приводную камеру 152 через вторую соединительную часть 157. Таким образом, в этом варианте осуществления на линейное перемещение груза 145 не влияет внутреннее пространство второй приводной камеры 152, находящееся в сжатом состоянии, при котором наружный воздух не может быть введен (адиабатическое сжатие), когда груз 145 перемещается влево, как показано на чертеже.
По существу в средстве 141 динамического снижения вибрации груз 145 приводится в действие в соответствии с вибрацией, вводимой с внешней стороны, таким образом пассивно снижая вибрацию. Согласно представленному варианту осуществления, груз 145 принуждается вынужденно и активно совершать возвратно-поступательное движение в направлении, противоположном направлению возвратно-поступательного движения бойка 131, используя колебания давления внутри камеры 121 кривошипа, которые вызываются приведением в движение приводного элемента 127. Поэтому средство 141 динамического снижения вибрации можно использовать постоянно, независимо от величины вибрации в молотке 101. Другими словами, груз 145 средства 141 динамического снижения вибрации можно использовать подобно противовесу, который активно приводится в действие механизмом преобразования движения. Такая конструкция особенно выгодна, когда пользователь использует молоток 101 с прикладыванием большой прижимающей силы к молотку 101. Более конкретно механизированный инструмент может гарантировать достаточную функцию снижения вибрации, активно приводя в действие груз 145, даже когда общая величина вибрации, вводимая в средство 141 динамического снижения вибрации, мала.
Второй вариант осуществления
Теперь будет описан второй вариант осуществления настоящего изобретения со ссылкой на фиг.6 и 7. Во втором варианте осуществления груз 245 средства 241 динамического снижения вибрации можно активно приводить в действие только в режиме управления под нагрузкой, в котором нагрузку прикладывают к головке 219 молотка со стороны обрабатываемой детали. С этой целью цилиндрический элемент 261 приведения в действие и смещающую пружину 263 устанавливают вокруг цилиндра 229.
На фиг.6 молоток 201 изображен в режиме управления без нагрузки, в котором со стороны обрабатываемой детали нагрузку к головке 219 молотка не прикладывают. При этом элемент 261 приведения в действие смещен влево, как видно на чертеже, к смещающей пружине 263. В этом состоянии исполнительный элемент 261 закрывает первую соединительную часть 255, которая соединяет первую приводную камеру 251 средства 241 динамического снижения вибрации с камерой 221 кривошипа. Исполнительный элемент 261 также закрывает второй соединительный участок 257, который соединяет вторую приводную камеру 252 средства 241 динамического снижения вибрации с внешним пространством. Дополнительно исполнительный элемент 261 открывает третью соединительную часть 259, которая соединяет камеру 221 кривошипа с внешним пространством через камеру сжатия, образованную между приводным элементом 227 и бойком 231.
В результате в режиме управления без нагрузки камера 221 кривошипа соединяется с наружной стороной через третью соединительную часть 259, а не с первой приводной камерой 251 через первую соединительную часть 255. Поэтому груз 245 не приводится вынужденно в действие посредством использования колебаний давления внутри камеры 221 кривошипа. Таким образом, в режиме управления без нагрузки, в котором снижение вибрации так сильно не требуется, приведение в действие груза 245 предотвращают так, чтобы груз 245 препятствовал вызову вибрации молотка 201. В результате средство 241 динамического снижения вибрации функционирует по существу как пассивный механизм снижения вибрации в соответствии с вибрацией, вводимой снаружи.
Как показано на фиг.7, при ударном воздействии на обрабатываемую деталь посредством молотка 201, когда пользователь нажимает на молоток 201, к головке 219 молотка прикладывается нагрузка со стороны обрабатываемой детали (сила противодействия, действующая против прижимающей силы) F. Такое состояние определяют как режим управления под нагрузкой. В режиме управления под нагрузкой исполнительный элемент 261 скользит по цилиндру 229 от головки 219 молотка против силы смещения смещающей пружины 263 из-за прижимающей силы, прикладываемой пользователем к молотку 201. Тогда исполнительный элемент 261 открывает первую соединительную часть 255 и вторую соединительную часть 257, которые были закрытыми в режиме управления без нагрузки, и закрывает третью соединительную часть 259, которая была открыта. В результате предотвращают соединение камеры кривошипа 221 с внешним пространством и производят соединение с первой приводной камерой 251 средства 241 динамического снижения вибрации.
В этом состоянии ведущая шестерня 222 вращается и приводной элемент 227 совершает возвратно-поступательное движение посредством плеча 225 кривошипа. Затем боек 231 совершает возвратно-поступательное движение и передает ударную силу на головку 219 молотка через ударный затвор 233. Таким образом, молоток 201 приводят в действие в режиме управления под нагрузкой. При этом, когда рабочий объем и таким образом давление внутри камеры 221 кривошипа колеблется, такое колеблющееся давление действует на первую приводную камеру 251 через первую соединительную часть 255. В результате подобно первому варианту осуществления груз 245 принуждается совершать возвратно-поступательное движение в направлении, противоположном направлению возвратно-поступательного движения бойка 231 так, что вибрация молотка 201 может быть эффективно уменьшена.
Когда груз 245 активно приводится в действие при использовании колебания давления камеры 221 кривошипа в режиме управления под нагрузкой, вторая приводная камера 252 открывается наружу через вторую соединительную часть 257. Таким образом, эффективно предотвращается препятствование движению груза 145 из-за адиабатического расширения или сжатия второй приводной камеры 252. Другие компоненты или элементы во втором варианте осуществления по существу идентичны компонентам и элементам первого варианта осуществления и поэтому не будут описаны подробно.
Третий вариант осуществления
Теперь будет описан третий вариант осуществления настоящего изобретения со ссылкой на фиг.8 и 9. Подобно второму варианту осуществления в третьем варианте осуществления груз 345 средства 341 динамического снижения вибрации можно активно приводить в действие только в режиме управления под нагрузкой, при котором к головке 319 молотка прикладывают нагрузку со стороны обрабатываемой детали. Однако третий вариант осуществления конструктивно отличается от второго варианта осуществления состоянием соединения камеры 321 кривошипа в режимах движения под нагрузкой и без нагрузки. В молотке 301 согласно этому варианту осуществления цилиндрический исполнительный элемент 361 и смещающая пружина 363 расположены вокруг цилиндра 329. Камера 321 кривошипа всегда находится в связи с первой приводной камерой 351 средства 341 динамического снижения вибрации через первую соединительную часть 355.
На фиг.8 молоток 301 показан в режиме управления без нагрузки, в котором со стороны обрабатываемой детали (не показана) к головке 319 молотка нагрузку не прикладывают. При этом исполнительный элемент 361 смещен влево, как видно на чертеже, к смещающей пружине 363. В этом состоянии исполнительный элемент 361 закрывает вторую соединительную часть 357, которая соединяет вторую приводную камеру 352 средства 341 динамического снижения вибрации с внешним пространством, в то же время открывая третью соединительную часть 359, которая соединяет камеру 321 кривошипа с внешним пространством.
В результате в режиме управления без нагрузки камера 321 кривошипа соединяется с внешним пространством через третью соединительную часть 359 так, чтобы груз 345 нельзя было активно приводить в действие, используя колебания давления внутри камеры 321 кривошипа. Таким образом, в режиме управления без нагрузки, в котором снижение вибрации не так желательно, предотвращается неосторожное активное приведение в действия груза 345, которое может вызывать вибрацию молотка 301.
Как показано на фиг.9, при ударном воздействии на обрабатываемую деталь с использованием молотка 301, когда пользователь нажимает на молоток 301, к головке 319 молотка прикладывается нагрузка со стороны обрабатываемой детали (сила противодействия относительно прижимающей силы) F. Такое состояние определяется как режим управления под нагрузкой. При режиме управления под нагрузкой исполнительный элемент 361 скользит по цилиндру 329 от головки 319 молотка против силы смещения смещающей пружины 363 из-за прижимающей силы, прикладываемой пользователем к молотку 301. Тогда исполнительный элемент 361 открывает вторую соединительную часть 357, которая удерживалась закрытой в режиме управления без нагрузки, и закрывает третью соединительную часть 359, которая была открыта. В результате предотвращается соединение камеры 321 кривошипа с внешним пространством и образуется соединение с первой приводной камерой 351 средства 341 динамического снижения вибрации через первую соединительную часть 355.
В этом состоянии ведущая шестерня 322 вращается, а приводной элемент 327 совершает возвратно-поступательное движение посредством плеча 325 кривошипа. Тогда боек 331 совершает возвратно-поступательное движение и передает ударную силу головке 319 молотка с помощью ударного затвора 333. Таким образом, молоток 301 приводят в действие в режиме управления под нагрузкой. При этом когда рабочий объем и таким образом давление внутри камеры 321 кривошипа колеблется, такое колеблющееся давление действует на первую приводную камеру 351 через первую соединительную часть 355. В результате груз 345 принуждается к выполнению возвратно-поступательного движения в направлении, противоположном направлению возвратно-поступательного движения бойка 331 так, что вибрация молотка 301 может быть эффективно уменьшена.
Когда груз 345 вынужденно и активно приводят в действие, используя колебания давления камеры 321 кривошипа в режиме управления под нагрузкой, вторая приводная камера 352 открывается наружу через вторую соединительную часть 357. Таким образом, эффективно предотвращают препятствование приводному движению груза 345 посредством адиабатического расширения или сжатия внутри второй камеры 352 приведения в действие. Другие компоненты или элементы в третьем варианте осуществления по существу идентичны компонентам и элементам первого варианта осуществления и поэтому не будут описаны подробно.
Во втором и третьем вариантах осуществления груз 245 (345) средства 241 (341) динамического снижения вибрации управляемым образом приводят в действие посредством образования соединения или разъединения между камерой 221 (321) кривошипа и внешним пространством, камерой 221 (321) кривошипа и первой приводной камерой 251 (351), и второй приводной камерой 252 (352) и внешним пространством. Однако это можно сконструировать так, что груз 245 (345) управляемым образом приводится в действие, используя любой из этих элементов.
Четвертый вариант осуществления
Теперь будет описан четвертый вариант осуществления настоящего изобретения со ссылкой на фиг.10. В четвертом варианте осуществления сделаны различные модификации, чтобы улучшить работу вышеупомянутых вариантов осуществления. На фиг.10 показан молоток 401 как пример усовершенствования молотка 301 (см. фиг.9) согласно третьему варианту осуществления в режиме управления под нагрузкой. В молотке 401 дополнительно обеспечены характеристические элементы, такие как клапан 471 регулирования давления, упругий элемент 473, соединительная часть 475 приводной камеры, пружина 477, имеющая нестационарную жесткость, и область 479 воздушной подушки. Эти особенности можно также применить к молоткам 101, 201 согласно другим вариантам осуществления.
Клапан 471 регулирования давления располагают в канале 472 между камерой 421 кривошипа и внешним пространством. Когда груз 445 средства 441 динамического снижения вибрации активно приводят в действие, используя колебания давления камеры 421 кривошипа, клапан 471 регулирования давления соответственно стравливает давление внутри камеры кривошипа 421 наружу. Таким образом, клапан 471 регулирования давления регулирует давление, прикладываемое к первой приводной камере 451 (давление, прикладываемое к грузу 445), и регулирует скорость приведения и силу приведения в движение груза 445.
Упругий элемент 473 расположен в каждом из торцевых участков первой приводной камеры 451 и второй приводной камеры 452. Таким образом, упругий элемент 473 предотвращает столкновение груза 445 с концом цилиндрического корпуса 443 средства 441 динамического снижения вибрации и соответственно неблагоприятное влияние на долговечность средства 441 динамического снижения вибрации, когда величина хода груза 445, совершающего возвратно-поступательное движение в направлении, противоположном направлению возвратно-поступательного движения бойка 431, чрезмерно увеличивается. Упругий элемент 473 также препятствует выгибанию пружины 477 из-за чрезмерно большой величины хода.
Соединительная часть 475 приводной камеры проходит на предварительно определенное расстояние от боковой поверхности второй приводной камеры 452 к боковой поверхности первой приводной камеры 451 во внутренней стенке цилиндрического корпуса 441. Соединительная часть 475 имеет диаметр, превышающий диаметр груза 445, и таким образом образует область большого диаметра, в которой между грузом 445 и цилиндрическим корпусом 441 можно определить зазор. Когда величина хода груза 445 при возвратно-поступательном движении в цилиндрическом корпусе 441 находится внутри предварительно определенного диапазона, соединительная часть 475 изолирует первую приводную камеру 451 от второй приводной камеры 452. Когда величина хода груза 445 при возвратно-поступательном движении превышает пределы предварительно определенного диапазона, соединительная часть 475 соединяет первую приводную камеру 451 со второй приводной камерой 452, когда груз 445 по всей длине располагается в области 475 соединительной части. Таким образом, когда величина хода груза 445 чрезмерно увеличивается, давление внутри первой приводной камеры 451 соответствующим образом переходит во вторую камеру 452 приведения в действие так, чтобы величину хода груза 445 можно было уменьшить и можно было оптимизировать характеристику снижения вибрации.
Пружину 477, имеющую нестационарную жесткость, конфигурируют так, что ее сила смещения, действующая в направлении, противоположном направлению возвратно-поступательного движения груза 445, соразмерно увеличивается, когда величина хода груза 455 чрезмерно увеличивается. А именно пружину 477 конфигурируют так, чтобы пружина имела нестационарную жесткость пружины, то есть жесткость пружины соразмерно увеличивается, когда пружина 477 перемещается от груза 445. Например, можно использовать пружину с неравномерными шагами витков или коническую пружину.
Область 479 воздушной подушки подобно упругому элементу 473 по выбору располагают в торцевых участках первой приводной камеры 451 и второй приводной камеры 452, чтобы предотвратить неблагоприятное воздействие на цилиндрический корпус 443 или пружину 477 груза 445, когда величина хода груза 445 при возвратно-поступательном движении чрезмерно увеличивается.
Пятый вариант осуществления
Теперь будет описан пятый вариант осуществления настоящего изобретения со ссылкой на фиг.11 и 12. В молотке 501 согласно этому варианту осуществления груз 545 средства 541 динамического снижения вибрации и смещающая пружина 553, которая прикладывает силу смещения к грузу 545, имеют цилиндрическую форму и расположены так, чтобы образовать первую приводную камеру 551 и вторую приводную камеру 552 по внешней периферийной поверхности цилиндра 529, отделяя их друг от друга. Первая приводная камера 551 всегда находится в связи с камерой 521 кривошипа посредством первой соединительной части 559. Груз 545 может скользить в осевом направлении головки 519 молотка (показанной только на фиг.12) вдоль цилиндра 529, воспринимая силу смещения смещающей пружины 553.
Цилиндрический исполнительный элемент 561 и смещающую пружину 563, которая смещает исполнительный элемент 561, располагают между цилиндром 529 и грузом 545. На фиг.11 молоток 501 показан в режиме управления без нагрузки, при котором к головке 519 молотка никакая нагрузка не прикладывается со стороны обрабатываемой детали (не показана). При этом исполнительный элемент 561 смещается влево, как видно на чертеже, с помощью смещающей пружины 563. В этом состоянии исполнительный элемент 561 открывает вторую соединительную часть 560, которая соединяет первую приводную камеру 551 с внешним пространством (камера сжатия образована между приводным элементом 527 и бойком 531).
В результате в режиме управления без нагрузки давление внутри камеры 521 кривошипа направляется в первую приводную камеру 551 через первую соединительную часть 559, а затем в камеру сжатия между приводным элементом 527 и бойком 531 через вторую соединительную часть 560 и таким образом выводится наружу. Поэтому груз 545 активно не приводят в действие, используя колебания давления внутри камеры 521 кривошипа. Таким образом, в режиме управления без нагрузки, при котором снижение вибрации так сильно не требуется, предотвращают случайное активное приведение в действие груза 545 и таким образом предотвращают вибрацию молотка 501. Дополнительно средство 541 динамического снижения вибрации функционирует по существу как пассивный механизм снижения вибрации в соответствии с вибрацией, вводимой снаружи (молоток 501).
Как показано на фиг.12, при ударном воздействии на обрабатываемую деталь, с использованием молотка 501, когда пользователь нажимает на молоток 501, к головке молотка 519 прикладывают нагрузку F со стороны обрабатываемой детали (силу противодействия относительно прижимающей силы). Такое состояние определяют как режим управления под нагрузкой. В режиме управления под нагрузкой исполнительный элемент 561 скользит вдоль цилиндра 529 от головки 519 молотка против силы смещения смещающей пружины 563 под действием прижимающей силы, прикладываемой пользователем к молотку 501. Затем исполнительный элемент 561 закрывает вторую соединительную часть 560, которая была открыта в режиме управления без нагрузки. В результате связь камеры 521 кривошипа и первой камеры 551 приведения в действие с внешним пространством нарушается.
В этом состоянии, когда приводной элемент 527 совершает возвратно-поступательное движение, боек 531 также совершает возвратно-поступательное движение и передает ударную силу головке 519 молотка с помощью ударного затвора 533. Таким образом, молоток 501 приводят в действие в режиме управления под нагрузкой. При этом, когда рабочий объем и таким образом давление внутри камеры 521 кривошипа колеблется, такое колеблющееся давление действует на первую приводную камеру 551 через первую соединительную часть 559. В результате груз 545 заставляют совершать возвратно-поступательное движение в направлении, противоположном направлению возвратно-поступательного движения бойка 531, таким образом эффективно выполняя функцию снижения вибрации.
В этом варианте осуществления груз 545 средства 541 динамического снижения вибрации имеет цилиндрическую форму и расположен вдоль периферийной поверхности цилиндра 529, и груз 545 заставляют совершать скользящее возвратно-поступательное движение вдоль цилиндра 529. При этой конструкции пространство, требуемое для того, чтобы установить средство 541 динамического снижения вибрации в молотке 501, может быть сведено к минимуму так, чтобы можно было достигнуть миниатюризации молотка.
В средстве 141 (241, 341, 441, 541) динамического снижения вибрации механизм снижения вибрации образован из груза 145 (245, 345, 445, 545) и смещающей пружины 153 (253, 353, 453, 553). Однако его можно сконструировать так, что предпочтительно можно применять не только жесткость элемента пружины, но и демпфирующую силу, например, заправляя масло в область с обеих сторон от груза.
Шестой вариант осуществления
Теперь будет описан шестой вариант осуществления настоящего изобретения со ссылкой на фиг.13-15. Внутри шестого представленного молотка 601 вал 623 эксцентрика расположен в положении, смещенном от центра вращения ведущей шестерни 622. Вал 623 эксцентрика имеет ведомую шестерню 624, которая зацепляется с ведущей шестерней 622. Один конец плеча 625 кривошипа соединен с валом 623 эксцентрика, а другой конец соединен с приводным элементом (поршнем) 627. Ведущая шестерня 622, вал 623 эксцентрика и плечо 625 кривошипа расположены внутри камеры 621 кривошипа.
Приводной элемент 627 и боек 631 скользящим образом расположены внутри цилиндра 629. Цилиндр 629 может перемещаться в своем осевом направлении (в осевом направлении головки 619 молотка) с помощью направляющей 635 трубчатого цилиндра, которую устанавливают в гильзе 608 кожуха 607 устройства. Цилиндр 629 всегда поджимается к держателю 617 инструмента с помощью нажимной пружины 637. Нажимную пружину 637 располагают между фронтальным концом цилиндрической направляющей 635 и пружинным приемником 638, который образуют на цилиндре 629 вокруг его периферийной поверхности.
Таким образом, в режиме управления без нагрузки, в котором молоток 601 не прижимают к обрабатываемой детали, или в котором нагрузку, связанную с ударным действием, к головке 619 молотка не прикладывают, цилиндр 629 заставляют перемещаться к держателю 617 инструмента. Затем, как показано на фиг.14, цилиндр 629 упирается в ступенчатую поверхность 617b держателя инструмента 617 через амортизационный материал в форме брекерной резины 639 и остается в переднем положении.
В режиме управления под нагрузкой, когда головка 619 молотка отведена назад (смещена право, как показано на чертежах), цилиндр 629 заставляют двигаться назад от держателя 617 инструмента посредством ударного затвора 633 и брекерной резины 639. Затем цилиндр 629 упирается в стопор 635a, образованный на осевом заднем конце направляющей 635 цилиндра, и остается в заднем положении. Таким образом, цилиндр 629 может перемещаться между передним положением около держателя 617 инструмента и задним положением, отдаленном от держателя 617 инструмента. Переднее положение и заднее положение соответствуют "первому положению" и "второму положению" согласно настоящему изобретению.
Камера 629a пневматической пружины (воздушное пространство для сжатия) образована в цилиндре 629 между приводным элементом 627 и бойком 631. Камеру 629a пневматической пружины можно соединить с внешним пространством через вентиляционное отверстие 661. Вентиляционное отверстие 661 проходит сквозь цилиндр 629 и служит для предотвращения холостого ударного действия. В режиме управления без нагрузки вентиляционное отверстие 661 открывают, чтобы соединить камеру 629a пневматической пружины с внешним пространством (воздухом). В то время как в режиме управления под нагрузкой, в котором цилиндр 629 находится в отведенном назад положении, отдаленном от держателя 617 инструмента, вентиляционное отверстие 661 закрывается направляющей 635 цилиндра, установленной вокруг цилиндра 629, таким образом предотвращая связь камеры 629a пневматической пружины с внешним пространством.
Камеру 621 кривошипа можно соединить с внешним пространством через вентиляционное отверстие 663. Вентиляционное отверстие 663 проходит сквозь гильзу 608 и направляющую 635 цилиндра и служит для управления вынужденной вибрацией средства 641 динамического снижения вибрации. В режиме управления без нагрузки, в котором цилиндр 629 находится в переднем положении около держателя 617 инструмента, вентиляционное отверстие 663 открыто, чтобы соединять камеру 621 кривошипа с внешним пространством. В то время как в режиме управления под нагрузкой, в котором цилиндр 629 находится в отведенном назад положении, отдаленном от держателя 617 инструмента, вентиляционное отверстие 663 закрывается цилиндром 629, таким образом предотвращая соединение камеры 621 кривошипа с внешним пространством.
Теперь объясним действие сконструированного, как описано выше, молотка 601. Сначала объясним действие молотка 601 в режиме управления под нагрузкой. Пользователь прижимает молоток 601 к обрабатываемой детали, чтобы выполнить ударное воздействие на обрабатываемую деталь (не показана) так, что к головке 619 молотка со стороны обрабатываемой детали прикладывается нагрузка.
Когда приводной электродвигатель 611 (показанный на фиг.13) приводят в действие, выходная мощность вращения приводного электродвигателя 611 заставляет ведущую шестерню 622 вращаться в горизонтальной плоскости. Когда ведущая шестерня 622 вращается, вал 623 эксцентрика, который имеет ведомую шестерню 624, находящуюся в зацеплении с ведущей шестерней 622, вращается в горизонтальной плоскости, что, в свою очередь, заставляет плечо 625 кривошипа качаться в горизонтальной плоскости. Тогда приводной элемент 627 на конце плеча 625 кривошипа скользящим образом совершает возвратно-поступательное движение внутри отверстия цилиндра 629.
В этом состоянии, когда молоток 601 прижимают к обрабатываемой детали, головка 619 молотка отводится назад обрабатываемой деталью, что, в свою очередь, заставляет цилиндр 629 перемещаться назад от держателя инструмента 617 с помощью ударного затвора 633 и брекерной резины 639 против силы смещения нажимной пружины 637. Когда цилиндр 629 перемещается в заднее положение, как показано на фиг.15, вентиляционное отверстие 661 цилиндра 629 закрывается направляющей 635 цилиндра. В то же время вентиляционное отверстие 663 камеры 621 кривошипа также закрывается цилиндром 629. Приводной элемент 627 скользит вперед относительно движения назад цилиндра 629, таким образом сжимая воздух внутри камеры 629a пневматической пружины, образованной пространством между приводным элементом 627 и бойком 631. Боек 631 совершает возвратно-поступательное движение внутри цилиндра 629 и соударяется с ударным затвором 633 на скорости, превышающей скорость приводного элемента 627, под действием пневматической пружины в результате сжатия воздуха. Кинетическая энергия бойка 631, которая вызывается соударением с ударным затвором 633, передается головке 619 молотка. Таким образом, на обрабатываемую деталь (не показана) оказывается ударное воздействие.
Средство 641 динамического снижения вибрации на корпусе 603 используют для снижения импульсной и циклической вибрации, образующейся при приведении в действие головки молотка 619, как упомянуто выше. Более конкретно груз 647 и смещающие пружины 653 взаимодействуют с целью пассивного снижения вибрации корпуса 603, на котором проявляется предварительно определенное внешнее усилие (вибрация). Таким образом, вибрацию молотка 601 по этому варианту осуществления можно эффективно смягчать или уменьшать.
В этом варианте осуществления, когда молоток 601 приводят в действие, рабочий объем внутри камеры 621 кривошипа изменяется, так как приводной элемент 627 совершает возвратно-поступательное движение в осевом направлении головки 619 молотка внутри цилиндра 629. Например, когда приводной элемент 627 перемещается к головке 619 молотка (вперед), сила действует на боек 631 в направлении к головке 619 молотка под действием пневматической пружины между бойком 631 и приводным элементом 627. При этом рабочий объем внутри камеры 621 кривошипа увеличивается, а давление внутри камеры 621 кривошипа падает, так как приводной элемент 627 скользит к головке 619 молотка. Уменьшенное давление действует на первую камеру 651 приведения в действие средства 641 динамического снижения вибрации через соединительную часть 655. В результате сила действует на груз 645 в направлении от головки 619 молотка.
Когда приводной элемент 627 далее скользит к головке 619 молотка, пока он не достигает мертвой точки положения сжатия (переднего конца). При этом боек 631 перемещается к головке 619 молотка и соударяется с ударным затвором 633 с помощью непрерывного действия пневматической пружины. В результате импульсная сила бойка передается головке 619 молотка и головка 619 молотка совершает возвратно-поступательное движение внутри держателя 617 инструмента и таким образом выполняет ударное действие.
В это время давление внутри камеры 621 кривошипа, которое было уменьшено из-за увеличения рабочего объема внутри камеры 621 кривошипа, непрерывно прикладывается к внутреннему участку первой приводной камеры 651. Таким образом, усилие (усилие вытягивания) непрерывно действует на груз 645 в направлении от головки 619 молотка. В результате груз 645 скользит назад (вправо, как видно на чертеже). Таким образом, в режиме управления под нагрузкой молотка 601, средство 641 динамического снижения вибрации не только служит пассивным механизмом снижения вибрации, но и служит активным механизмом снижения вибрации с помощью вынужденной вибрации, при которой груз 645 активно приводится в действие посредством использования колебания давления внутри камеры 621 кривошипа.
Далее, когда груз 645 перемещается линейно в направлении, противоположном направлению движения бойка 631, наружный воздух вводится во вторую приводную камеру 652 через вторую соединительную часть 657 второй приводной камеры 652. Таким образом, в этом варианте осуществления эффективно предотвращается препятствование линейному движению груза 645 посредством внутреннего пространства второй приводной камеры 652, находящегося в расширенном состоянии, в которое воздух снаружи не может вводиться (адиабатическое расширение), когда груз 645 перемещается право, как видно на чертеже.
Когда ведущая шестерня 622 дополнительно поворачивается от положения, при котором приводной элемент 627 расположен в мертвой точке состояния сжатия (на переднем конце), приводной элемент 627 перемещается от головки 619 молотка. В результате сила (сила вытягивания) действует на боек 631 в направлении от головки 619 молотка с помощью пневматической пружины, действующей со стороны расширения. При этом, поскольку рабочий объем внутри камеры 621 кривошипа уменьшается, а давление внутри камеры 621 кривошипа растет, сила (прижимающая сила) действует на груз 645 средства 641 динамического снижения вибрации в направлении к головке 619 молотка под действием колеблющегося давления, которое прикладывается к первой приводной камере 651 через соединительную часть 655.
Как описано выше, из-за времени, требуемого для приведения в действие пневматической пружины, инерционной силы бойка 631 или других подобных факторов, боек 631 начинает двигаться линейно с небольшой временной задержкой после того, как приводной элемент 627 начинает двигаться от головки 619 молотка. В результате в процессе, в котором приводной элемент 627 передвигается к мертвой точке несжатого состояния (к обратному концу), боек 631 начинает линейное движение в направлении от головки 619 молотка. В то же время груз 645 средства 641 динамического снижения вибрации начинает линейное движение в направлении, противоположном направлению линейного движения бойка 631. В результате, даже когда боек 631 отведен назад, механизм снижения вибрации эффективно функционирует, активно приводя в действие груз 645.
Когда груз 645 перемещается линейно влево, как видно на чертеже, наружный воздух вводится во вторую приводную камеру 652 через вторую соединительную часть 657. Таким образом, в этом варианте осуществления на линейное перемещение груза 645 не влияет внутреннее пространство второй приводной камеры 652, находящееся в сжатом состоянии, в которое наружный воздух не может вводиться (адиабатическое сжатие), когда груз 645 перемещается влево, как видно на чертеже.
Далее объясним действие молотка 601 в режиме управления без нагрузки, в котором к головке 619 молотка никакая нагрузка не прикладывается со стороны обрабатываемой детали, или в котором молоток 601 (головку 619 молотка) не прижимают к обрабатываемой детали. В режиме управления без нагрузки цилиндр 629 перемещается к переднему положению около держателя 617 инструмента с помощью нажимной пружины 637, а вентиляционное отверстие 661 камеры 629a пневматической пружины и вентиляционное отверстие 663 камеры 621 кривошипа открываются.
В этом состоянии, даже если приводной электродвигатель 611 приводят в действие и приводной элемент 627 перемещается вперед с помощью ведущей шестерни 622, ведомой шестерни 624, вала 623 эксцентрика и плеча 625 кривошипа, воздух внутри пневматической пружины камеры 629a не сжат, потому что камера пневматической пружины 629a соединена с внешним пространством через вентиляционное отверстие 661. В результате боек 631 не приводится в действие. Более конкретно приводной элемент 627 работает на холостом ходу так, что холостое ударное действие головки 619 молотка предотвращается. Далее, поскольку камера 621 кривошипа также соединена с внешним пространством через вентиляционное отверстие 663, давление внутри камеры 621 кривошипа не колеблется, даже если приводной элемент 627 перемещается назад. Поэтому груз 645 активно не приводится в действие посредством использования колебания давления внутри камеры 621 кривошипа. Поэтому средство 641 динамического снижения вибрации не служит в качестве активного механизма для снижения вибрации с помощью вынужденной вибрации, но служит только пассивным механизмом для снижения вибрации. Таким образом, в режиме управления без нагрузки предотвращается образование вибрации в молотке 601 грузом 645.
Согласно этому варианту осуществления, средство 641 динамического снижения вибрации можно переключать между состоянием вынужденной вибрации и состоянием отключения вынужденной вибрации в зависимости от того, находится ли оно в режиме управления под нагрузкой или в режиме управления без нагрузки, чтобы оно могло выполнять функцию уменьшения вибрации в соответствии с режимом управления молотка 601. Такого управления переключением между состоянием вынужденной вибрации и состоянием выключения вынужденной вибрации достигают с помощью перемещения уже имеющегося цилиндра 629, который содержит компонентную часть молотка 601. Таким образом, количество деталей можно уменьшить, а конструкцию можно сделать более простой.
Помимо этого, в настоящем варианте осуществления при конструкции, в которой цилиндр 629 открывает и закрывает вентиляционное отверстие 663 камеры 621 кривошипа, цилиндр 629 и периферийный участок вокруг цилиндра, на котором скользит цилиндр 629, могут образовывать область уплотняющей поверхности. В результате можно обеспечить достаточное уплотнение так, чтобы эффективность вынужденной вибрации средства 641 динамического снижения вибрации можно было увеличить. Далее при конструкции, в которой камера 621 кривошипа соединена с внешним пространством в режиме управления без нагрузки, можно избежать колебания давления внутри камеры 621 кривошипа, или, в частности, сопротивления, обусловленного увеличением давления. Таким образом, бесполезное потребление энергии можно эффективно предотвратить.
Седьмой вариант осуществления
Теперь будет описан седьмой вариант осуществления настоящего изобретения со ссылкой на фиг.16 - 18. В седьмом варианте осуществления вынужденную вибрацию средства 741 динамического снижения вибрации (активное приведение в действие груза 745) выполняют с предварительно определенной временной задержкой после отключения предотвращения холостого ударного действия, когда молоток 701 переключают с режима управления без нагрузки на режим управления под нагрузкой.
В этом варианте осуществления, в дополнение к конструкции, описанной по отношению к первому варианту осуществления, молоток дополнительно содержит подвижное кольцо 765 и втулку 767. Подвижное кольцо 765 устанавливают вокруг цилиндра 729 и используют для открывания и закрывания вентиляционного отверстия 761 для камеры 729a пневматической пружины. Подвижное кольцо 765 располагают между втулкой 767 и направляющей 135 цилиндра. Втулку 767 устанавливают вокруг фронтального участка цилиндра 729 (на боковой поверхности головки 719 молотка) так, чтобы ее можно было перемещать относительно цилиндра 729. Один конец втулки 767 в ее осевом направлении (осевом направлении головки 719 молотка) находится в соприкосновении или соединен с брекерной резиной 739. Нажимную пружину 737 размещают между направляющей 735 цилиндра и втулкой 767 и прикладывают силу смещения к подвижному кольцу 765, чтобы продвигать его к втулке 767. Далее сила смещения нажимной пружины 737 сжимает стопор 769, который прочно установлен вокруг цилиндра 729, через подвижное кольцо 765 и перемещает цилиндр 729 вперед.
Фиг.16 изображает режим управления без нагрузки, в котором головку 719 молотка не прижимают к обрабатываемой детали. В режиме управления без нагрузки подвижное кольцо 765 перемещается вперед около держателя 717 инструмента с помощью нажимной пружины 737 и удерживается в соприкосновении со ступенчатой поверхностью 717b держателя 717 инструмента посредством втулки 767 и брекерной резины 739. Далее цилиндр 729 также перемещается и удерживается в переднем положении около держателя 717 инструмента с помощью подвижного кольца 765 и стопора 769 посредством нажимной пружины 737. При этом передний конец цилиндра 729 в переднем положении помещается в противоположном направлении на предварительно определенное расстояние C (см. фиг.16) от принимающего участка 767a для кольцевого цилиндра, образованного на переднем конце втулки 767. Когда кольцо 765 перемещается к переднему положению, вентиляционное отверстие 761 для камеры 729a пневматической пружины открывается, и камера 729a пневматической пружины соединяется с внешним пространством. Кроме того, когда цилиндр 729 перемещается к переднему положению, вентиляционное отверстие 763 для камеры 721 кривошипа открывается, и камера 721 кривошипа соединяется с наружной стороной.
Поэтому, даже если приводной электродвигатель 711 приводят в действие в режиме управления без нагрузки и приводной элемент 727 перемещается вперед (к боковой поверхности головки 719 молотка) с помощью ведущей шестерни 722, ведомой шестерни 724, вала 723 эксцентрика и плеча 725 кривошипа, воздух внутри камеры 729a пневматической пружины не сжимается, потому что камера 729a пневматической пружины соединена с внешним пространством через вентиляционное отверстие 761. Поэтому пневматическая пружина не действует на боек 731, и боек 731 не приводится в действие. Таким образом, предотвращается холостое ударное действие головки 719 молотка.
Кроме того, поскольку камера 721 кривошипа также соединена с внешним пространством через вентиляционное отверстие 763, давление внутри камеры 721 кривошипа не изменяется, даже если приводной элемент 727 перемещается вперед. Поэтому груз 745 активно не приводится в действие посредством использования колебания давления внутри камеры 721 кривошипа. Таким образом, в режиме управления без нагрузки, в котором уменьшение вибрации так сильно не требуется, предотвращается образование вибрации молотка грузом 745, которую можно вызвать, если груз 745 подвергают вынужденной вибрации.
В режиме управления под нагрузкой, в котором нагрузку, связанную с ударным действием, прикладывают к головке 719 инструмента, когда головку 719 молотка отводят назад (перемещают право, как показано на чертежах), прижимая к обрабатываемой детали, подвижное кольцо 765 заставляют перемещаться назад от держателя 717 инструмента против силы смещения нажимной пружины 737 посредством ударного затвора 733, брекерной резины 739 и втулки 767. Как показано на фиг.17, перемещаясь к заднему положению таким путем, подвижное кольцо 765 закрывает вентиляционное отверстие 761 камеры 729a пневматической пружины, прерывая таким образом связь камеры 729a пружины с внешним пространством и отключая функцию предотвращения холостого ударного действия. В то же время приемный участок 767a втулки 767 упирается во фронтальный конец цилиндра 729. На этой стадии вентиляционное отверстие 763 камеры 721 кривошипа все еще удерживается открытым, и предотвращение холостого ударного действия отключается подвижным кольцом 765 до вынужденной вибрации.
После этого подвижное кольцо 765 дополнительно перемещается назад. При этом движении назад, как показано на фиг.18, цилиндр 729 задвигается приемным участком 767a втулки 767 и перемещается назад от держателя 717 инструмента. При этом подвижное кольцо 765 и цилиндр 729 двигаются вместе. Таким образом, вентиляционное отверстие 761 камеры 729a пневматической пружины остается закрытым. При движении назад цилиндр 729 закрывает вентиляционное отверстие 763 камеры 721 кривошипа и прерывает связь камеры 721 кривошипа с внешним пространством, допуская таким образом колебание давления внутри камеры 721 кривошипа. В результате средство 741 динамического снижения вибрации переключается в состояние вынужденной вибрации, в котором груз 745 средства 741 динамического снижения вибрации активно приводится в действие колебаниями давления внутри камеры 721 кривошипа. Цилиндр 729 перемещается назад, пока он не остановится в заднем положении на границе со стопором 735a направляющей 735 цилиндра. Функция средства 741 динамического снижения вибрации посредством вынужденной вибрации является такой же, как в первом варианте осуществления, и поэтому не будет описана.
Подвижное кольцо 765 и цилиндр 729 могут перемещаться между передним положением около головки 719 молотка и задним положением, отдаленным от головки 719 молотка, с предварительно определенной разницей во времени. Переднее положение и заднее положение соответствуют "первому положению" и "второму положению" соответственно согласно настоящему изобретению.
Как описано выше, согласно седьмому варианту осуществления, в режиме управления под нагрузкой предотвращение холостого ударного действия отключается до вынужденной вибрации средства 741 динамического снижения вибрации. Другими словами, вынужденная вибрация средства 741 динамического снижения вибрации выполняется с предварительно определенной временной задержкой после того, как отключено предотвращение холостого ударного действия. Во время работы молотка 701, после того, как давление внутри камеры 729a пневматической пружины начинает сжиматься с помощью движения вперед приводного элемента 727, боек 731 начинает перемещаться вперед давлением сжатия с небольшой временной задержкой (за счет требуемого времени сжатия для пневматической пружины для эффективного воздействия на боек 731), или боек 731 начинает перемещаться линейно к головке 719 молотка с небольшой временной задержкой из-за инерционной силы бойка 731 или других подобных факторов.
Согласно седьмому варианту осуществления, вынужденная вибрация средства 741 динамического снижения вибрации начинает действовать с временной задержкой после отключения предотвращения холостого ударного действия. При такой конструкции грузом 745 средства 741 динамического снижения вибрации можно управлять при синхронизации времени его перемещения так, чтобы груз 745 начинал линейно перемещаться в направлении, противоположном движению бойка 731. Другими словами, можно обеспечить выбор времени снижения вибрации с помощью вынужденной вибрации груза 745, чтобы он совпал с выбором времени генерации вибрации от нанесения удара бойка 731. В результате эффективность снижения вибрации можно увеличить. Другие компоненты или элементы во втором варианте осуществления, которые являются по существу идентичными компонентам и элементам первого варианта осуществления, даны с подобными ссылочными позициями, как и в первом варианте осуществления, и не будут описаны.
Седьмой вариант осуществления обеспечивает технический прием для запуска вынужденной вибрации средства 741 динамического снижения вибрации в режиме управления под нагрузкой, с временной задержкой после отключения предотвращения холостого ударного действия головки 719 молотка. Этот технический прием можно применить к шестому варианту осуществления, например, посредством регулирования положений вентиляционного отверстия 761 камеры 729a пневматической пружины и вентиляционного отверстия 763 камеры 721 кривошипа.
Реферат
Использование: касается механизированного инструмента. Обеспечивает снижение вибрации в механизированном инструменте. Инструмент содержит головку инструмента, приводной механизм, средство динамического снижения вибрации. Приводной механизм линейно приводит в движение головку инструмента посредством колебаний давления, чтобы обеспечить выполнение головкой инструмента предварительно заданного действия. Средство динамического снижения вибрации имеет груз, который совершает возвратно-поступательное движение под действием силы смещения упругого элемента, чтобы снизить вибрацию приводного механизма. Груз можно приводить в движение посредством колебаний давления, образующихся в приводном механизме. Груз средства динамического снижения вибрации можно активно приводить в движение колебаниями давления в приводном механизме головки инструмента. Независимо от величины вибрации, действующей на механизированный инструмент, можно принудительно и устойчиво использовать средство динамического снижения вибрации.11 з.п.ф-лы,18 ил.
Комментарии