Ручная машина с динамическим виброгасителем - RU2532246C2
Код документа: RU2532246C2
Чертежи
Описание
Настоящее изобретение относится к ручной машине, прежде всего к такой импульсно-силовой ручной машине, как перфоратор, отбойный молоток или пила, в частности сабельная пила. Ручная машина содержит толкатель и привод, способный сообщать толкателю возвратно-поступательное, в частности периодическое, движение вдоль оси поступательного движения. Ручная машина также имеет держатель для рабочего инструмента, функционально связанный с толкателем. Также ручная машина содержит по меньшей мере один противовес, функционально связанный с приводом таким образом, чтобы по меньшей мере частично компенсировать по меньшей мере силы, обусловленные, по меньшей мере опосредованно, указанным возвратно-поступательным движением.
Из публикации DE 282015 заявителю известна ручная машина, содержащая толкатель, который может приводиться в возвратно-поступательное движение посредством цилиндрического кулачка вращающегося цилиндра.
Из публикации WO 2004/082897 А1 известно наиболее близкое к изобретению по технической сущности решение (ближайший аналог), а именно ручная машина, прежде всего перфоратор, содержащая привод, толкатель, которому привод способен сообщать возвратно-поступательное движение вдоль оси поступательного движения, держатель для рабочего инструмента, функционально связанный с толкателем, и по меньшей мере один противовес, функционально связанный с приводом таким образом, чтобы по меньшей мере частично компенсировать силы, обусловленные возвратно-поступательным движением толкателя, причем противовес установлен с возможностью возвратно-поступательного движения вдоль оси поступательного движения и кинематически связан с направляющим кулачком, выполненным в установленном с возможностью вращения теле вращения таким образом, чтобы при вращении последнего противовес совершал возвратно-поступательное колебательное движение.
Объектом изобретения является ручная машина, прежде всего перфоратор, отбойный молоток или пила, содержащая привод, толкатель, которому привод способен сообщать возвратно-поступательное движение, в частности периодическое возвратно-поступательное движение, вдоль оси поступательного движения, держатель для рабочего инструмента, функционально связанный с толкателем, и по меньшей мере один противовес, функционально связанный с приводом таким образом, чтобы по меньшей мере частично компенсировать силы, обусловленные, по меньшей мере опосредованно, указанным возвратно-поступательным движением толкателя, причем противовес установлен с возможностью возвратно-поступательного движения вдоль оси поступательного движения и кинематически связан с направляющим кулачком, выполненным в установленном с возможностью вращения теле вращения таким образом, чтобы при вращении последнего противовес совершал возвратно-поступательное колебательное движение.
Противовес, установленный с возможностью возвратно-поступательного движения вдоль оси поступательного движения, кинематически связан с направляющим кулачком, выполненным в теле вращения, установленном с возможностью вращения, в частности выполненным в поверхности тела вращения. Направляющий кулачок выполнен таким образом, чтобы при вращении тела вращения противовес совершал возвратно-поступательное колебательное движение.
Силы, создаваемые, по меньшей мере опосредованно, возвратно-поступательным движением толкателя, могут включать в себя, например, силы, опосредованно создаваемые ускоряющимися или замедляющимися массами, в частности вибрационные силы. Другими силами, опосредованно создаваемыми возвратно-поступательным движением толкателя, могут быть, например, силы давления, в частности сила давления в газовом объеме (воздушной подушке) компрессионно-вакуумного ударного механизма.
Приведение противовеса в движение посредством направляющего кулачка выгодно тем, что позволяет сообщать противовесу возвратно-поступательное движение при особой компактности и простоте конструкции. Выгодным является также то, что посредством направляющего кулачка можно задавать форму колебаний противовеса, которая выбирается практически свободно.
Отличие изобретения от ближайшего аналога заключается в том, что ось вращения тела вращения совпадает с вышеупомянутой осью поступательного движения. Таким образом, толкатель, тело вращения с направляющим кулачком и противовес установлены соосно.
В предпочтительном варианте выполнения ручной машины ось вращения вращающегося элемента совпадает с осью поступательного движения. Благодаря такой конструкции достигается особенно эффективная компенсация силы, по меньшей мере опосредованно обусловленной возвратно-поступательным движением толкателя, в частности возвратно-поступательным колебательным движением.
Соосное расположение толкателя, тела вращения и связанного с ним посредством кулачковой пары противовеса обеспечивает особенно высокую эффективность компенсации сил, по меньшей мере опосредованно обусловленных возвратно-поступательным, в частности колебательным, движением толкателя, поскольку траектории движения центров масс толкателя и противовеса идеальным образом проходят по общей для двух элементов оси поступательного движения.
Также преимуществом изобретения является компактность привода толкателя и противовеса, обеспечивающая простоту интеграции виброгасителя в конструкцию продолговатой узкой ручной машины.
Соответственно, технические результаты, достигаемые при осуществлении изобретения, заключаются в повышении эффективности гашения вибраций и уменьшении конструктивного пространства, занимаемого толкателем и виброгасителем, особенно по ширине.
Предпочтительно, чтобы тело вращения имело еще один, в частности выполненный в его поверхности, направляющий кулачок для толкателя. Толкатель кинематически связан с этим направляющим кулачком. При этом направляющий кулачок выполнен таким образом, чтобы при вращении тела вращения толкатель совершал возвратно-поступательное колебательное движение.
Направляющий кулачок предпочтительно выполнять в виде углубления или сквозного отверстия в цилиндрическом теле вращения.
Предпочтительно также, чтобы толкатель и/или противовес был кинематически связан с направляющим кулачком тела вращения посредством соединительного элемента, в частности шарика.
Предпочтительно, чтобы траектория центра масс противовеса при совершении им возвратно-поступательного колебательного движения в течение одного периода колебаний проходила преимущественно по оси поступательного движения, предпочтительно полностью по оси поступательного движения. Этим достигается особенно эффективная компенсация сил, обусловленных возвратно-поступательным движением толкателя.
В предпочтительном варианте выполнения ручной машины направляющий кулачок для противовеса и/или направляющий кулачок для толкателя выполнен таким образом, что колебательное движение толкателя и колебательное движение противовеса имеют относительно друг друга фазовый сдвиг, не равный 90° и/или не равный 180°. Это позволяет - например, в случае выполнения ручной машины в виде отбойного молотка - эффективно компенсировать дополнительный фазовый сдвиг, обусловленный действием воздушной пружины.
Предпочтительно, чтобы фазовый сдвиг между колебательным движением толкателя и колебательным движением противовеса составлял от 200° до 270°, предпочтительно от 220° до 250°, особенно предпочтительно от 230° до 240°. Фазовый сдвиг, не равный 180°, легко обеспечить путем соответствующего выполнения тела вращения с направляющим кулачком.
Предпочтительно, чтобы частота колебаний толкателя была не равна частоте колебаний противовеса. Это позволяет эффективно компенсировать дополнительные колебания, например, обусловленные вибрациями.
Предпочтительно, чтобы форма колебаний толкателя и/или форма колебаний противовеса по меньшей мере на отдельных участках периода колебаний не была синусоидальной. Использование подобной формы колебаний позволяет, например, в течение одного периода колебаний создавать, по меньшей мере на отдельных участках периода колебаний, большую силу, компенсирующую колебания, чем при просто синусоидальном законе движения.
Далее, предпочтительно, чтобы форма колебаний была представлена рядом Фурье. Так, форма колебаний может принимать формы колебаний, описываемых периодическими и непрерывными функциями с периодом 2π.
Привод в предпочтительном исполнении содержит приводной двигатель. Приводной двигатель представляет собой, например, электрический двигатель, в частности электродвигатель с электронной коммутацией. В другом варианте осуществления изобретения приводной двигатель представляет собой пневматический приводной двигатель, в частности работающий от источника сжатого газа.
Объектом изобретения является также способ компенсации сил, по меньшей мере опосредованно создаваемых возвратно-поступательным колебательным движением толкателя ручной машины вдоль оси поступательного движения. При осуществлении предлагаемого в изобретении способа используют противовес, совершающий возвратно-поступательное движение вдоль оси поступательного движения, причем противовес приводят в вынужденное возвратно-поступательное колебательное движение вдоль оси поступательного движения в зависимости от формы направляющего кулачка, выполненного в теле вращения и проходящего на расстоянии от оси вращения последнего.
При осуществлении предлагаемого в изобретении способ толкатель предпочтительно приводить в вынужденное возвратно-поступательное колебательное движение вдоль оси поступательного движения в зависимости от формы направляющего кулачка, выполненного в теле вращения и проходящего на расстоянии от оси вращения последнего.
Ниже изобретение рассматривается на примере вариантов его осуществления со ссылками на чертежи, на которых показано:
на фиг.1 - вариант осуществления изобретения в случае выполнения ручной машины в виде перфоратора,
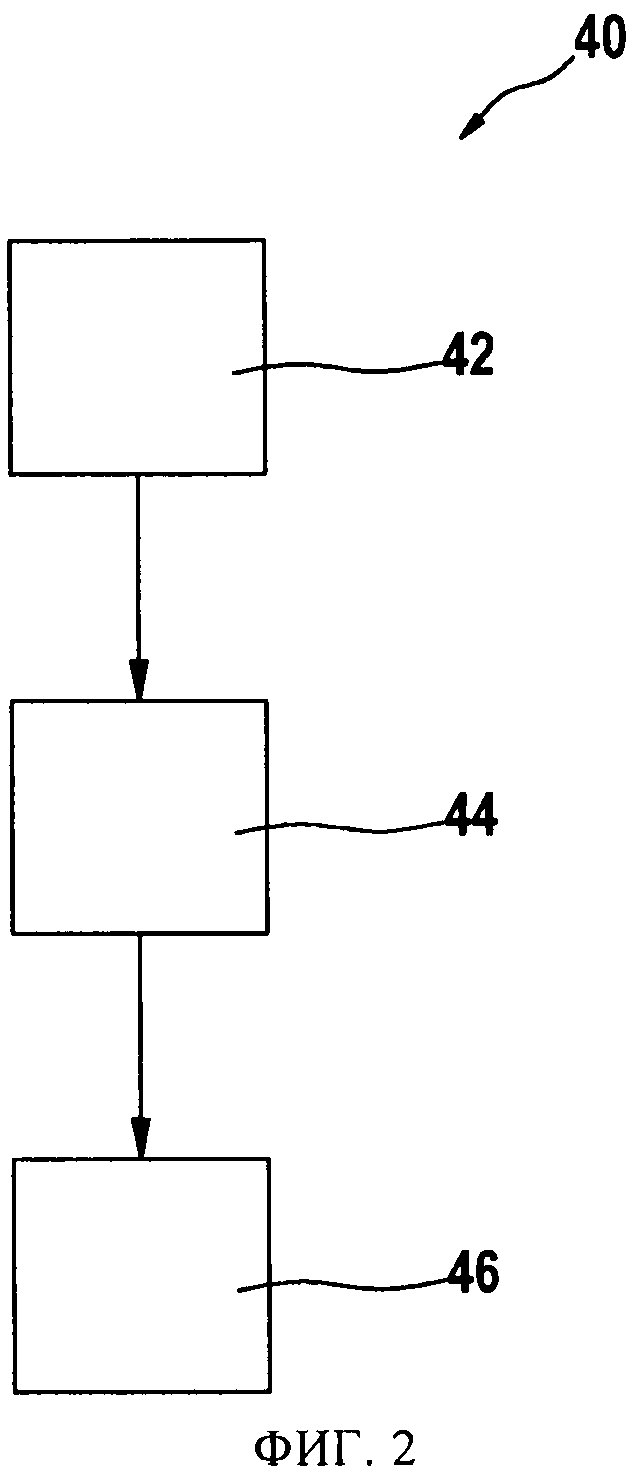
на фиг.2 - вариант осуществления изобретения в отношении способа компенсации вибрационных сил, создаваемых толкателем ручной машины.
На фиг.1 схематично в разрезе показан перфоратор 1. Перфоратор 1 имеет приводной двигатель 3, вал 4 которого имеет на конце шестерню 5. Шестерня 5 имеет цилиндрический зубчатый венец, который взаимодействует с зубчатым колесом 7, находясь с ним в зацеплении.
Приводной двигатель 3 является частью привода ручной машины, причем привод выполнен таким образом, чтобы сообщать толкателю 10 возвратно-поступательное движение вдоль оси 11 поступательного движения.
В состав привода также входит промежуточный вал 14, соединенный с зубчатым колесом и получающий от зубчатого колеса 7 вращательное движение вокруг оси вращения, совпадающей с осью поступательного движения. Промежуточный вал 14 имеет зубчатое колесо 15, расположенное на промежуточном валу 40 на осевом расстоянии от зубчатого колеса 7 и представляющее собой центральное зубчатое колесо планетарной передачи. Промежуточный вал 14 также соединен с телом 17 вращения, установленным с возможностью вращения вокруг оси, совпадающей с осью 11 поступательного движения.
Тело 17 вращения выполнено цилиндрической формы и имеет два направляющих кулачка, а именно направляющий кулачок 20 для толкателя 10 и направляющий кулачок 22 для динамического виброгасителя, или антивибратора, 12. Каждый из направляющих кулачков 20 и 22 выполнен в виде выемки в поверхности цилиндрического тела вращения 17.
Динамический виброгаситель 12 выполнен в виде кольца или полого цилиндра, имеющего на внутренней поверхности выемку для соединительного средства, в частности шарика, взаимодействующего с направляющим кулачком 22. Тело вращения 28 по меньшей мере частично расположено внутри динамического виброгасителя 12.
Ручная машина 1 также имеет шпиндель 16 для передачи вращения на рабочий инструмент. На конце шпиндель 16 имеет не показанный на чертеже держатель для рабочего инструмента. Шпиндель 16 представляет собой полый цилиндр, выполненный таким образом, чтобы в нем по меньшей мере частично помещались толкатель 10, цилиндрическое тело 17 вращения и промежуточный вал 14.
Промежуточный вал 14 своим зубчатым колесом 15 приводит во вращение по меньшей мере три сателлита планетарной передачи, из которых на чертеже показаны сателлиты 9 и 13. Эти сателлиты 9 и 13, а также по меньшей мере еще один сателлит соединены с выполненным в виде полого цилиндра шпинделем 16 и расположены на расстоянии в радиальном направлении от оси 11 поступательного движения. Ось 11 поступательного движения в рассматриваемом варианте осуществления изобретения также совпадает с осью вращения шпинделя 16.
Толкатель 10 в этом варианте осуществления изобретения выполнен, по меньшей мере на отдельных участках своей длины, в форме полого цилиндра, причем полость 25 этого цилиндра выполнена с таким расчетом, чтобы в нее меньшей мере частично входило тело 17 вращения. Толкатель 10 имеет цилиндрическую стенку, на внутренней поверхности которой имеется выемка под соединительное средство, передающее толкателю движение, в частности шарик 26. Так (посредством шариков), толкатель 10 может быть кинематически связан с направляющим кулачком 20, т.е. взаимодействовать с ним. Таким образом, тело 17 вращения одним концом входит внутрь толкателя, а другим концом - внутрь динамического виброгасителя, или антивибратора, 12.
Толкатель 10 имеет радиально выступающий шип 30, входящий в соответствующий паз 18 шпинделя с возможностью направленного перемещения в нем таким образом, чтобы толкатель 10 имел свободу движения вдоль оси 11 поступательного движения и был зафиксирован с геометрическим замыканием от вращения вокруг оси, совпадающей с осью 11 поступательного движения.
Динамический виброгаситель 12 имеет радиально выступающий шип 28, входящий в соответствующий паз 19 шпинделя с возможностью направленного перемещения в нем таким образом, чтобы динамический виброгаситель 12 имел свободу движения вдоль оси 11 поступательного движения и был зафиксирован с геометрическим замыканием от вращения вокруг оси, совпадающей с осью 11 поступательного движения.
Ниже описывается принцип работы ручной машины 1.
Когда приводной двигатель 3, выполненный, например, в виде электродвигателя с электронной коммутацией, приводит во вращательное движение вал 4, а с ним и шестерню 5, промежуточный вал 14 через зубчатое колесо 7, т.е. через одноступенчатую передачу, образованную зубчатым колесом 7 и шестерней 5 вала двигателя, получает вращательное движение вокруг оси вращения, совпадающей с осью 11 поступательного движения. Вместе с промежуточным валом 14 вращается зубчатое колесо 15 и тело 17 вращения. Вращаясь, тело 17 вращения сообщает толкателю 10, в соответствии с формой направляющего кулачка 20, возвратно-поступательное движение. Кроме того, тело 17 вращения посредством направляющего кулачка 22 приводит в возвратно-поступательное движение противовес 12. Направляющие кривые 20 и 22 выполнены таким образом, что фазовый сдвиг между движениями толкателя 10 и динамического виброгасителя 12 составляет от 230° до 240°. Этот фазовый сдвиг имеет, например, точку отсчета при 0°, соответствующую мертвой точке движения толкателя 10, находящейся со стороны рабочего инструмента. При совершении возвратно-поступательного движения толкателем 10 возвратно-поступательное движение получает и боек 34 ручной машины. Ручная машина 1 в этом варианте осуществления изобретения представляет собой перфоратор. Боек 34 в этом варианте связан с толкателем 10 посредством воздушного объема 33.
Зубчатое колесо 15, являясь центральным колесом планетарной передачи, приводит в движение сателлиты 9, 13, а также по меньшей мере еще один сателлит. От этих сателлитов шпиндель 16 приводится во вращательное движение вокруг оси вращения, совпадающей с осью 11 поступательного движения. Зубчатые пары, образуемые сателлитами и центральным зубчатым колесом 15 планетарной передачи, могут иметь передаточное отношение, составляющее, например, от 1 до 4.
Одноступенчатая передача, образуемая шестерней 5 вала двигателя и зубчатым колесом 7, может иметь передаточное отношение, составляющее, например, от 1 до 5.
В рассматриваемом варианте осуществления изобретения вал 4 приводного двигателя 3 расположен параллельно оси 11 поступательного движения. Вместе с тем возможен и такой вариант, в котором вал 4 двигателя проходит перпендикулярно оси 11 поступательного движения или наклонно к ней. Так, например, в варианте с расположением вала 4 двигателя перпендикулярно оси 11 поступательного движения зубчатый венец шестерни вала двигателя может быть венцом корончатого зубчатого колеса. В случае расположения вала 4 двигателя наклонно к оси 11 поступательного движения шестерня 5 вала двигателя и/или зубчатое колесо 7 может быть образовано коническим зубчатым колесом.
На фиг.2 осуществление изобретения представлено в отношении способа 40 компенсации сил, обусловленных возвратно-поступательным колебательным движением толкателя ручной машины вдоль оси поступательного движения. На шаге 42 телу вращения, например телу 17 вращения, показанному на фиг.1, сообщается вращательное движение вокруг оси вращения.
На шаге 44 посредством направляющего кулачка тела вращения толкателю сообщается колебательное движение в зависимости от вращательного движения тела вращения, т.е. вращательное движение преобразуется в возвратно-поступательное.
На шаге 46 тело вращения посредством еще одного направляющего кулачка сообщает противовесу встречное колебательное движение, направленное противоположно колебательному движению толкателя, таким образом, чтобы за счет встречного колебательного движения частично или полностью компенсировать, или устранять, по меньшей мере действующие на ручную машину силы, создаваемые колебательным движением толкателя, или дополнительно другие создаваемые в ручной машине вибрационные силы.
Реферат
Изобретение относится к ручной машине. Ручная машина содержит привод, толкатель, держатель для рабочего инструмента, связанный с толкателем, и противовес, связанный с приводом для компенсации сил, обусловленных указанным возвратно-поступательным движением толкателя. Привод выполнен с возможностью сообщения толкателю возвратно-поступательного движения вдоль оси поступательного движения. Противовес установлен с возможностью возвратно-поступательного движения вдоль оси поступательного движения и кинематически связан с направляющим кулачком, выполненным в теле вращения. Ось вращения тела вращения совпадает с осью поступательного движения. Причем при вращении тела вращения противовес совершает возвратно-поступательное колебательное движение. В результате повышается эффективность гашения вибраций. 6 з.п. ф-лы, 2 ил.
Комментарии