Датчики заделывания семенной борозды - RU2744801C2
Код документа: RU2744801C2
Чертежи



Описание
Уровень техники
Хорошо известно, что хороший контакт семян с почвой внутри семенной борозды является решающим фактором равномерного прорастания семян и высоких урожаев. Несмотря на то, что проведение выборочных проверок семенной борозды может помочь обеспечить некоторые гарантии, что эти решающие факторы достигнуты, такие выборочные проверки будут идентифицировать только состояния в конкретном проверяемом месте. Соответственно, существует потребность в системе, которая будет проверять достижение хорошего контакта семян с почвой во время операций посева и обеспечивать автоматическое или удаленное регулирование сеялки на ходу.
Краткое описание чертежей
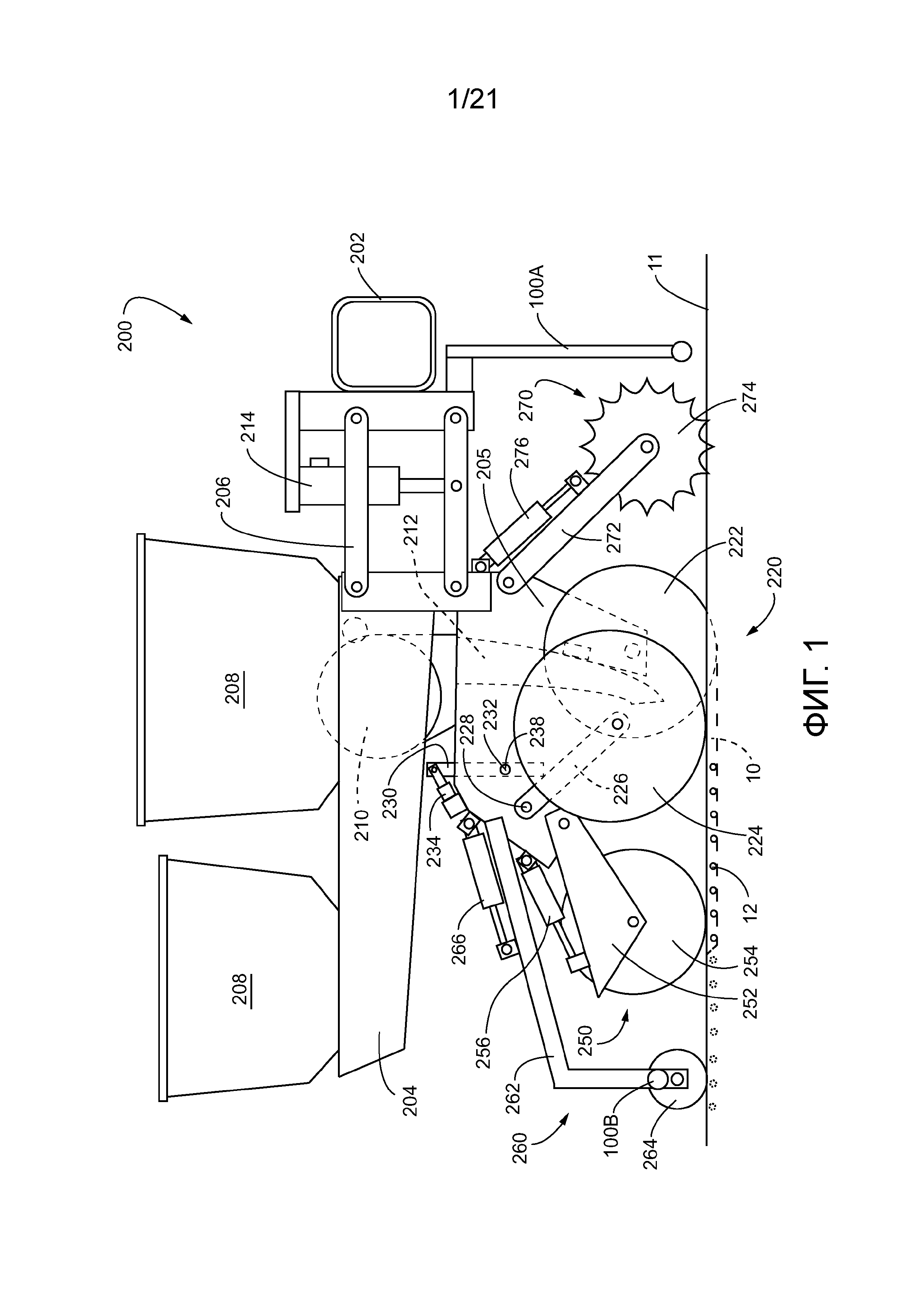
На фиг. 1 представлен вертикальный вид сбоку варианта осуществления высевающей секции сельскохозяйственной сеялки.
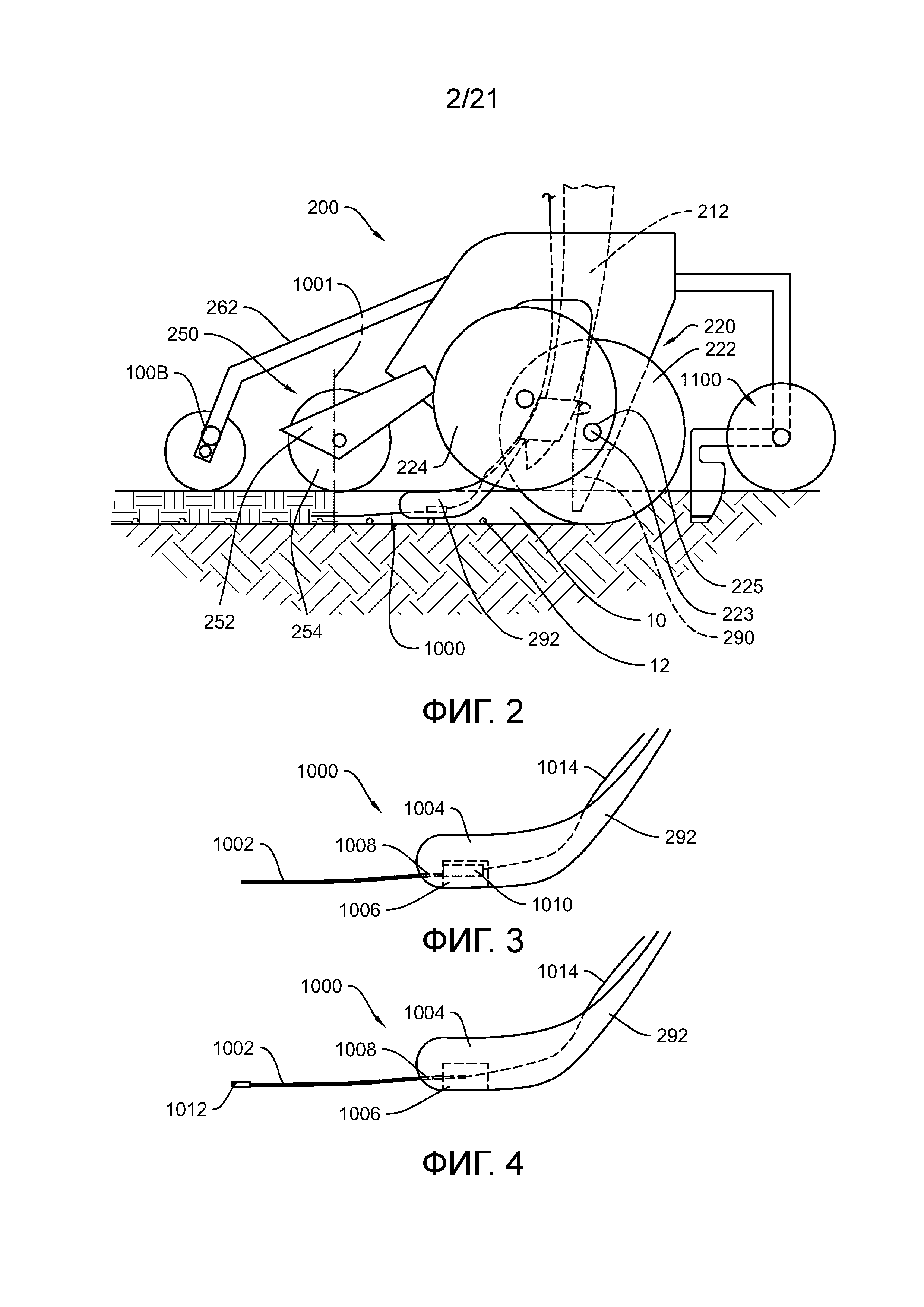
На фиг. 2 представлен вариант осуществления датчика заделывания борозды и контрольного датчика, находящегося на высевающей секции сеялки.
На фиг. 3 представлен вариант осуществления уплотнителя семян, выполненного с возможностью функционирования в качестве датчика заделывания борозды, показывающий тянущий провод, соединенный с инструментом, находящимся в корпусе уплотнителя семян.
На фиг. 4 представлен вариант осуществления датчика заделывания борозды с использованием преобразователя давления, соединенного с задним концом тянущего провода.
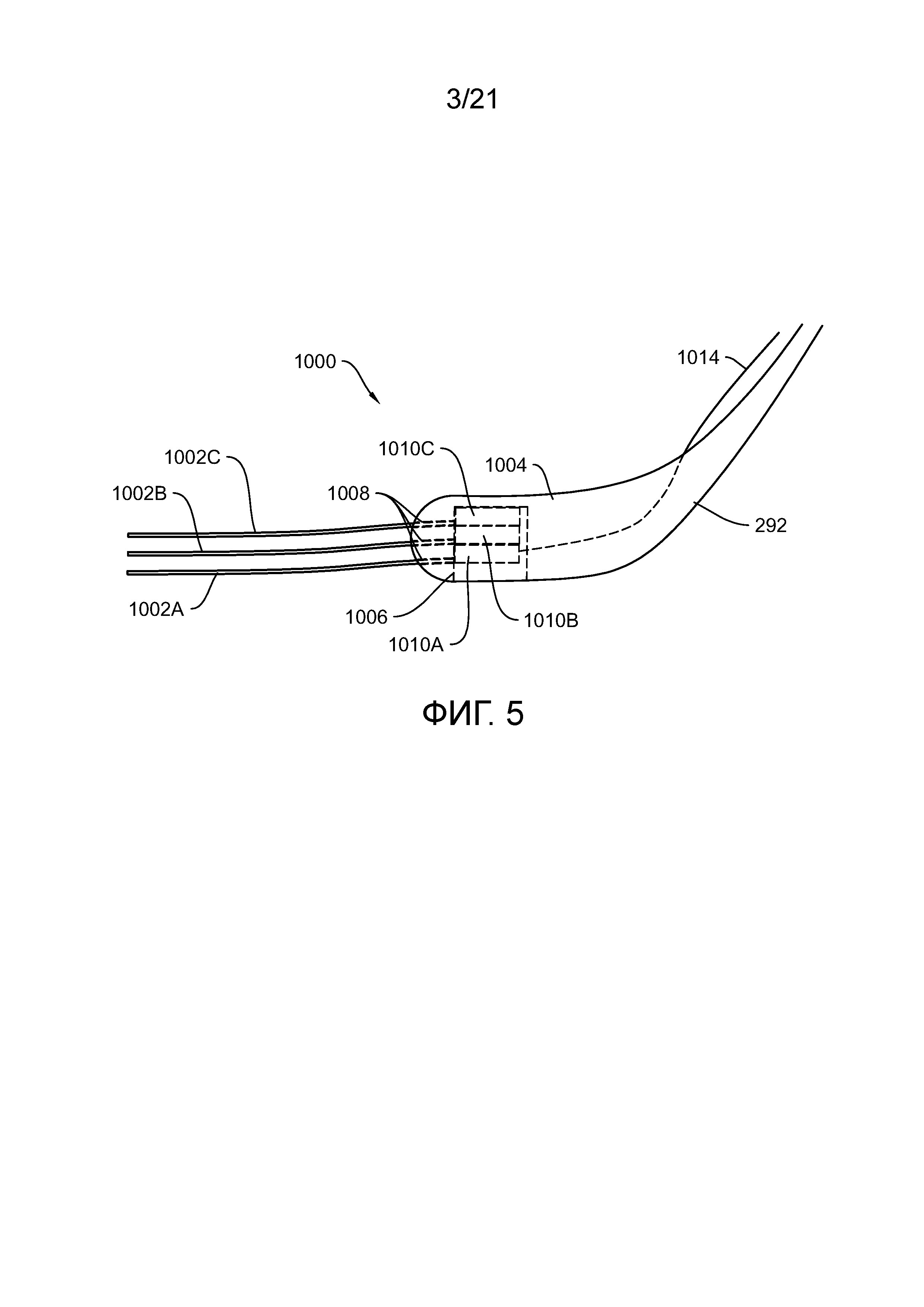
На фиг. 5 представлен вариант осуществления датчика заделывания борозды с вертикально уложенными тянущими проводами.
На фиг. 5A представлен альтернативный вариант осуществления показанного на фиг. 5 за счет содержания проводящих кончиков на конце тянущих проводов.
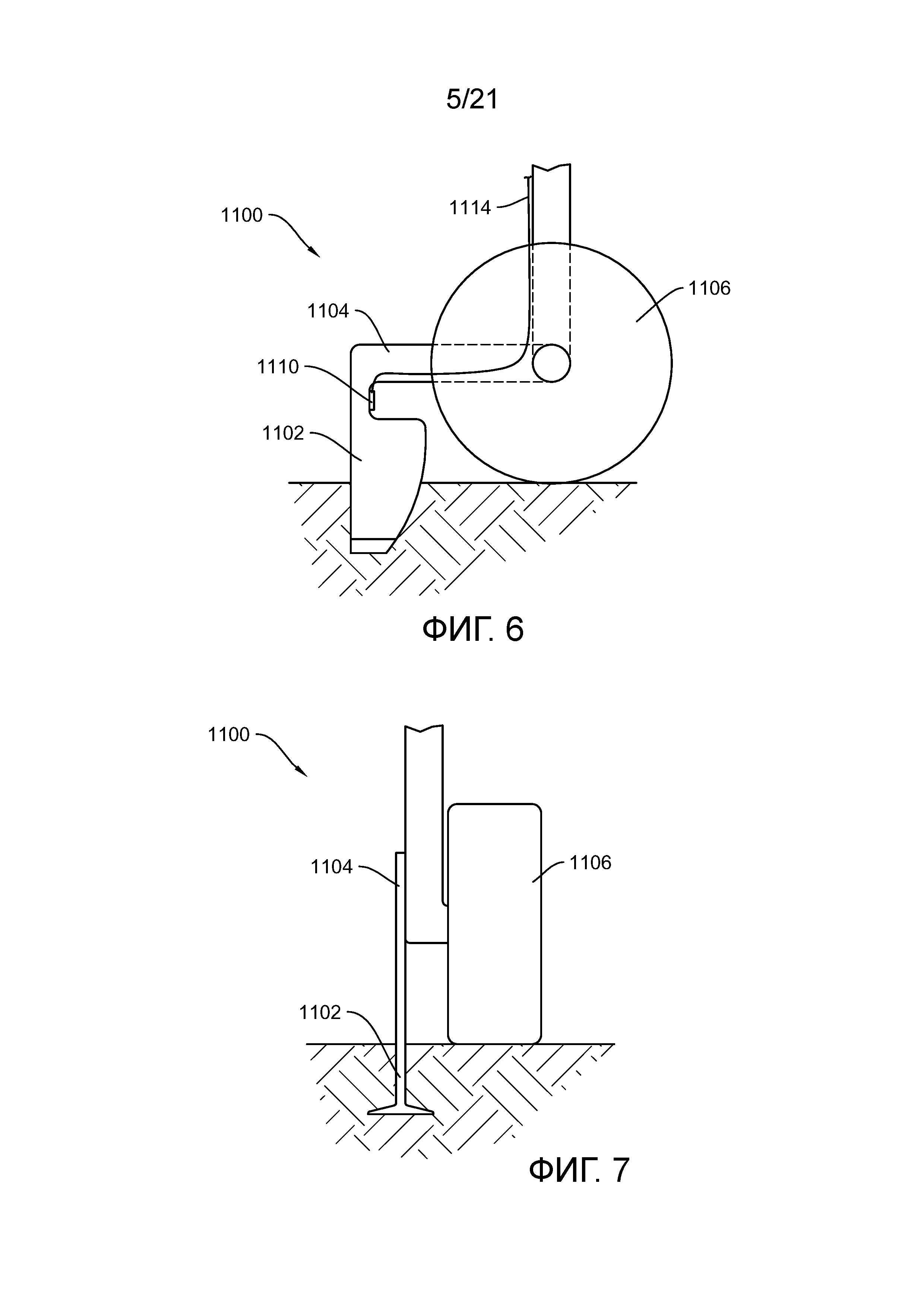
На фиг. 6 представлен увеличенный вертикальный вид сбоку варианта осуществления контрольного датчика.
На фиг. 7 представлен вертикальный вид сзади контрольного датчика фиг. 6.
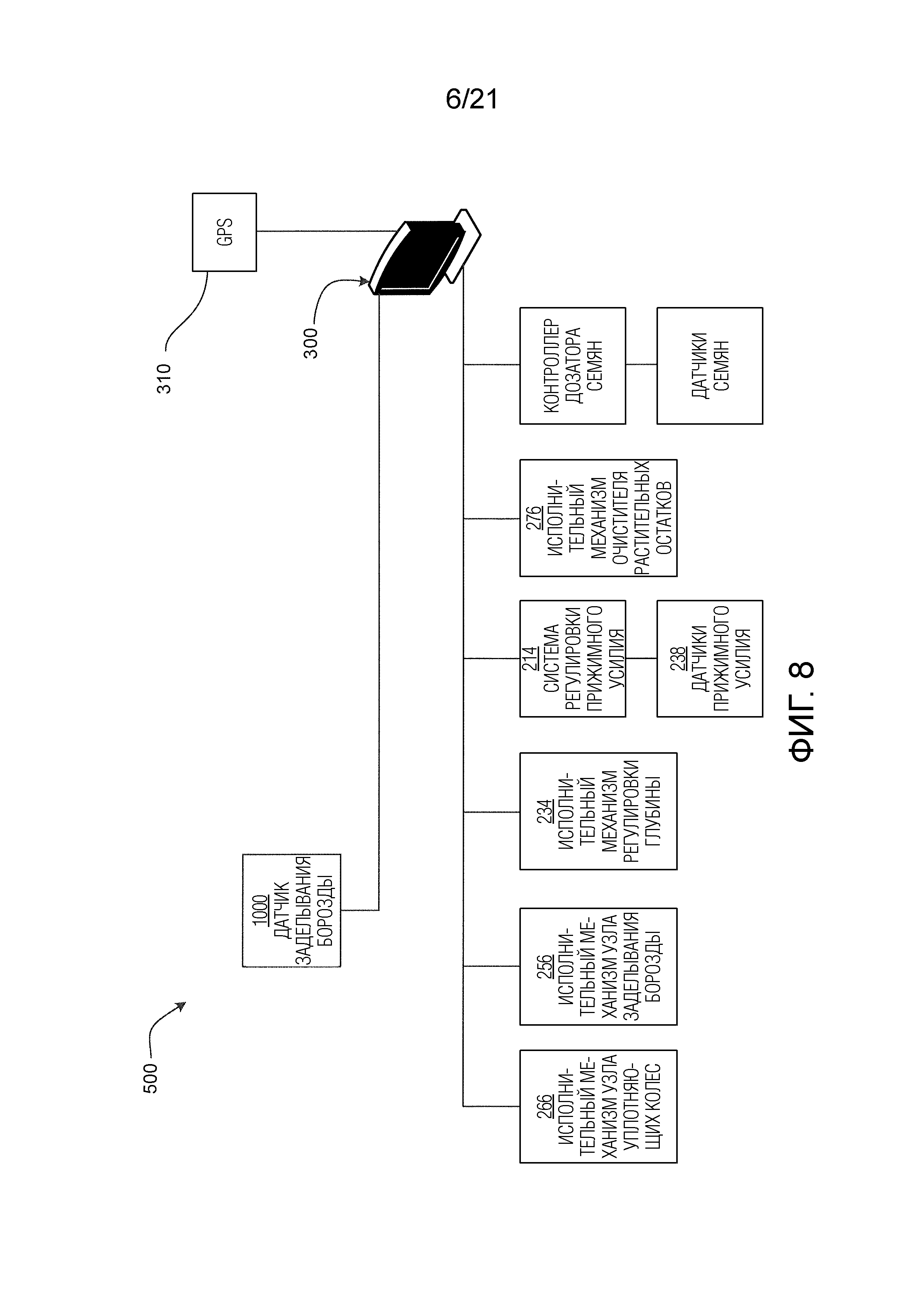
На фиг. 8 представлена схема системы для осуществления оперативного управления узлом заделочных колес и узлом прикатывающих колес на основании сигналов, генерируемых узлом заделывания борозды.
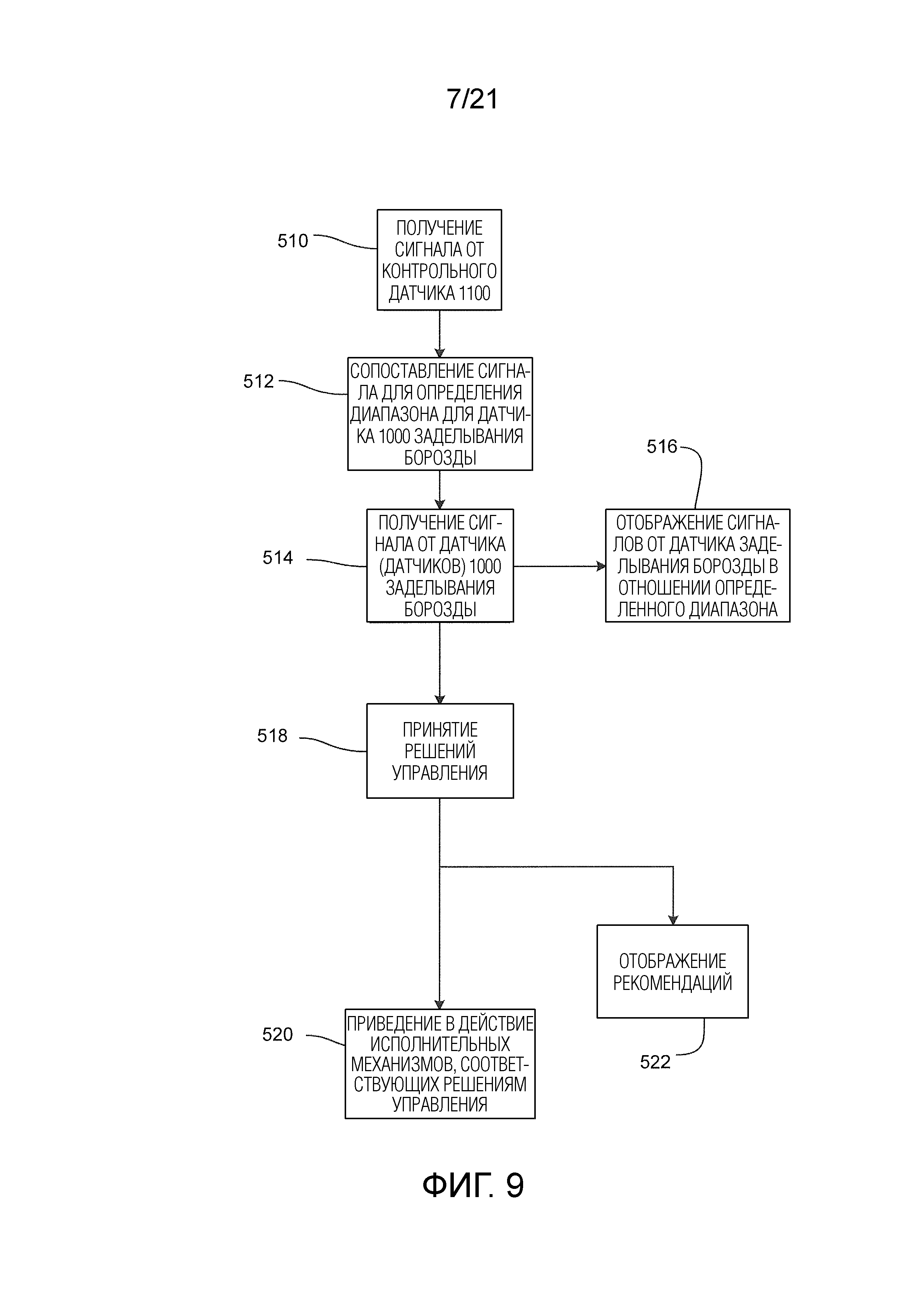
На фиг. 9 представлена блок-схема, иллюстрирующая вариант осуществления для выполнения оперативного управления и обратной связи с оператором на основании контрольного датчика и датчика заделывания борозды.
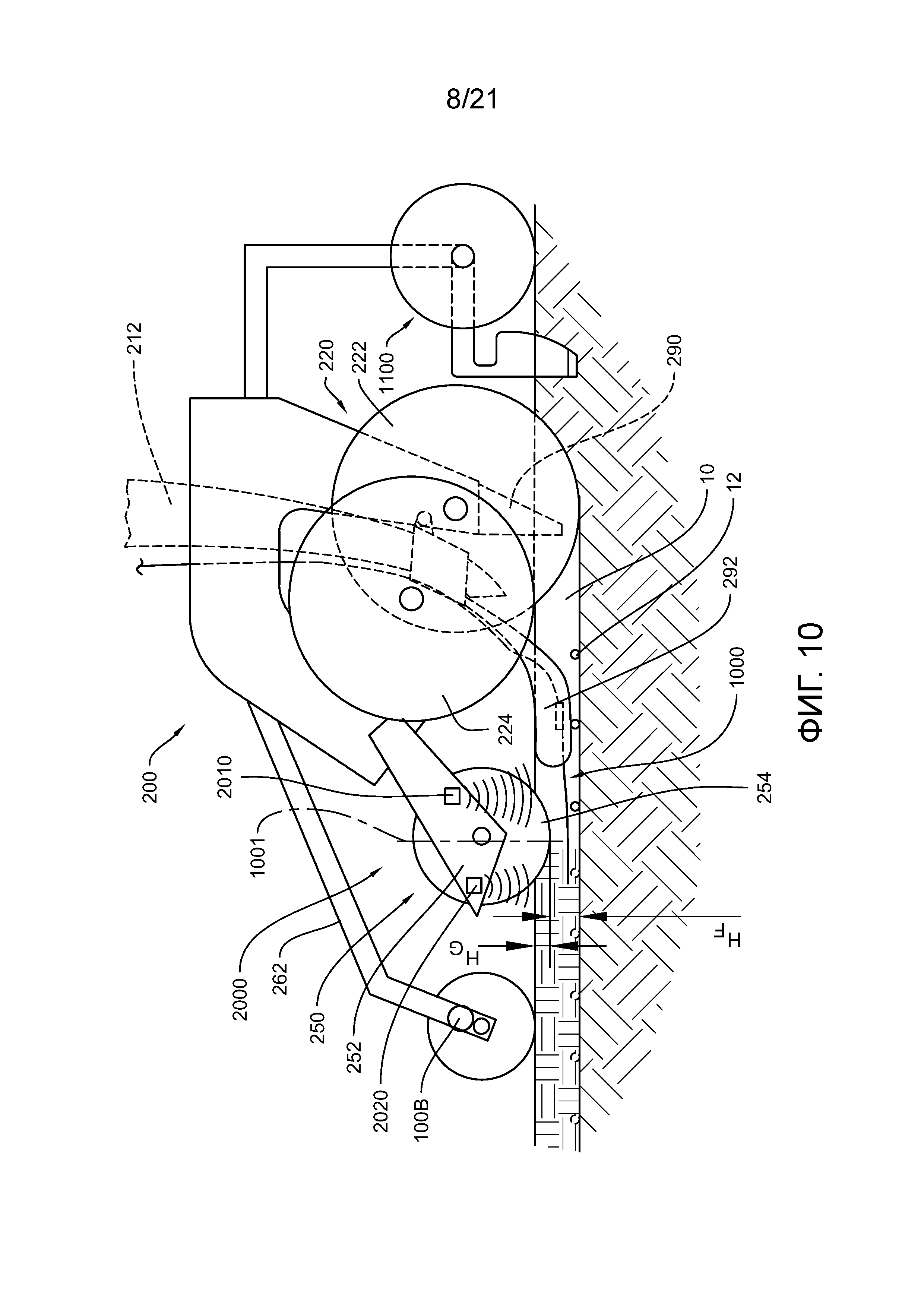
На фиг. 10 представлен вариант осуществления датчика заделывания борозды и сенсорной системы, находящейся на системе заделывания.
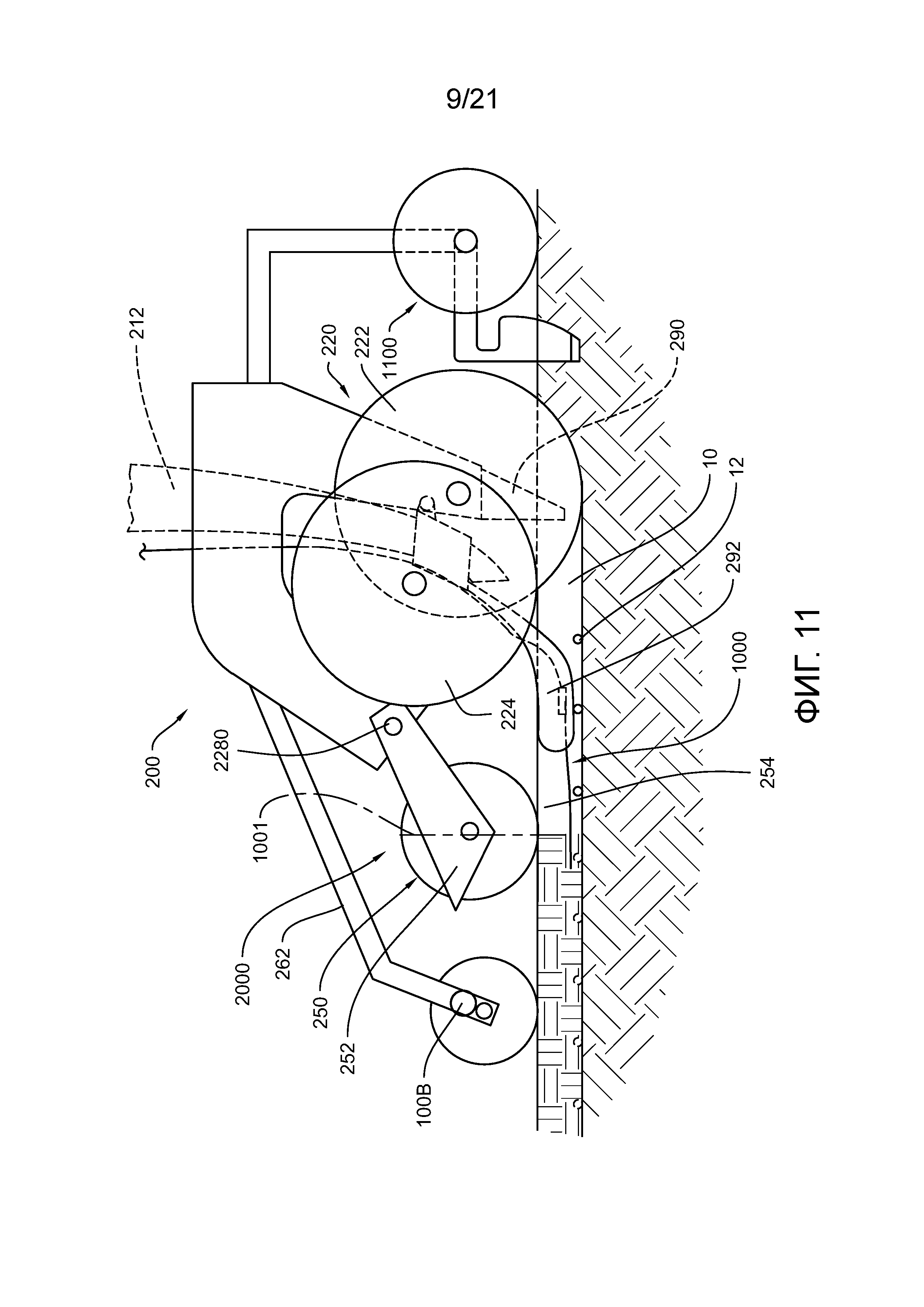
На фиг. 11 представлен вариант осуществления датчика заделывания борозды и углового датчика, находящегося на системе заделывания.
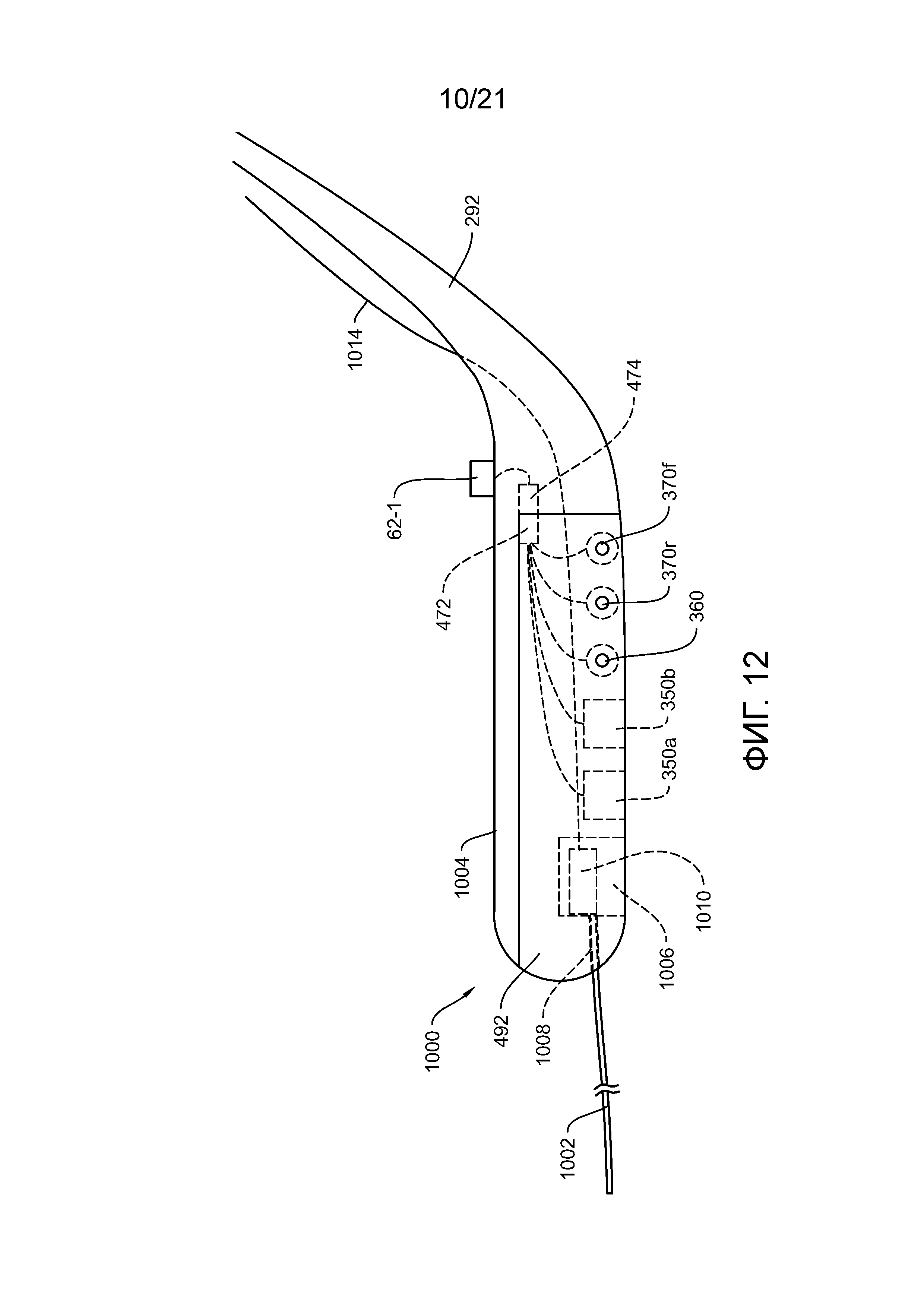
На фиг. 12 представлен вариант осуществления уплотнителя семян, выполненного с возможностью функционирования в качестве датчика заделывания борозды, показывающий тянущий провод, соединенный с инструментом, находящимся в корпусе уплотнителя семян и имеющим множество установленных на уплотнителе датчиков.
На фиг. 13 представлен альтернативный контрольный датчик.
На фиг. 14 представлен альтернативный контрольный датчик.
На фиг. 15 схематично представлен один вариант осуществления датчика рабочего слоя в вертикальной проекции, выполненной относительно семенной борозды.
На фиг. 16A-16C представлены типичные примеры изображений рабочего слоя, генерируемых датчиком рабочего слоя фиг. 15.
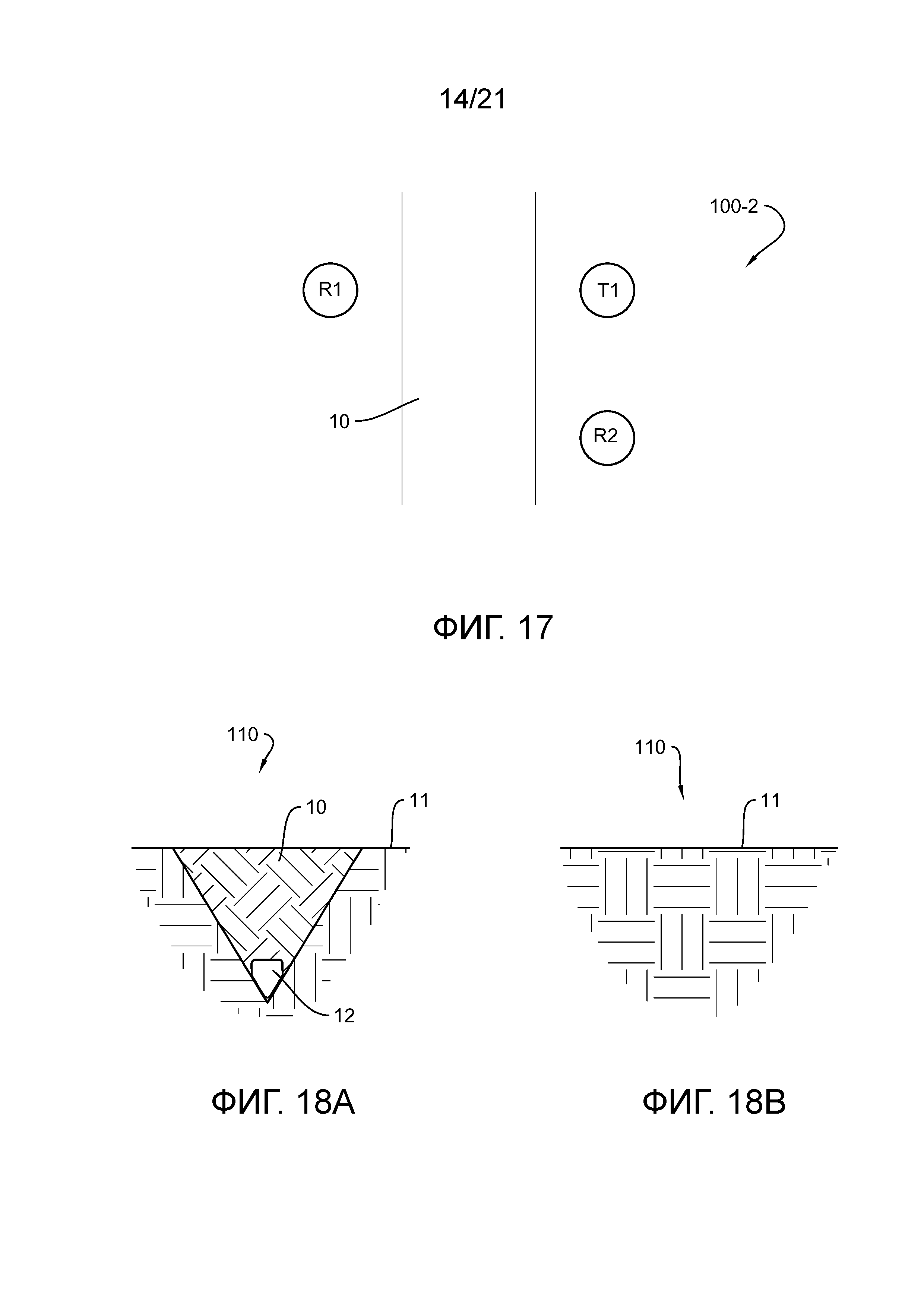
На фиг. 17 схематично представлен другой вариант осуществления датчика рабочего слоя на виде сверху, выполненном относительно семенной борозды.
На фиг. 18A-18B представлены типичные примеры изображений рабочего слоя, генерируемых датчиком рабочего слоя фиг. 17.
На фиг. 19 схематично представлен другой вариант осуществления датчика рабочего слоя в вертикальной проекции, выполненной относительно семенной борозды.
На фиг. 20 представлен типичный пример изображения рабочего слоя, генерируемого датчиком рабочего слоя фиг. 19.
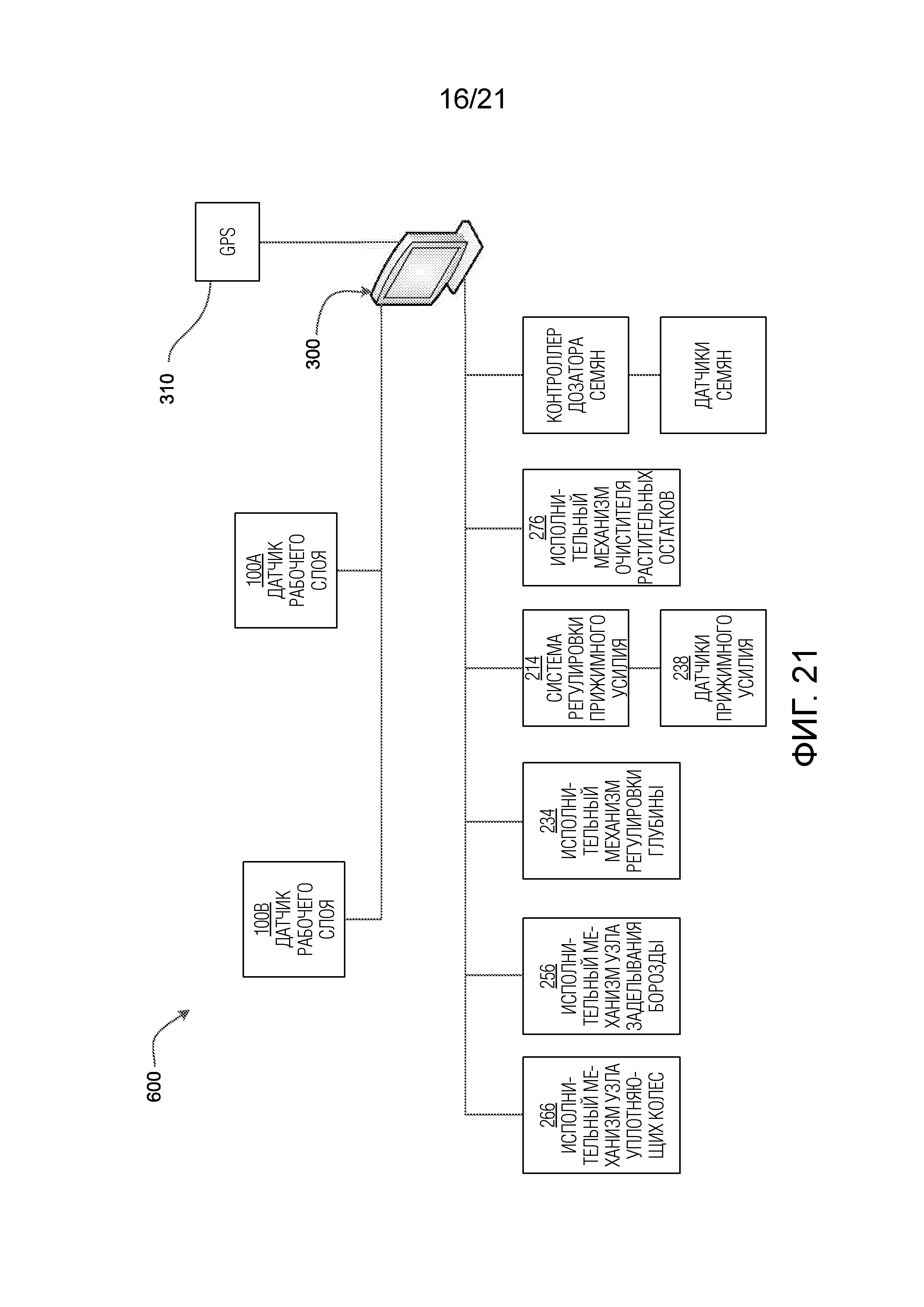
На фиг. 21 представлен вариант осуществления системы мониторинга, контроля осуществления рабочего слоя и обратной связи с оператором.
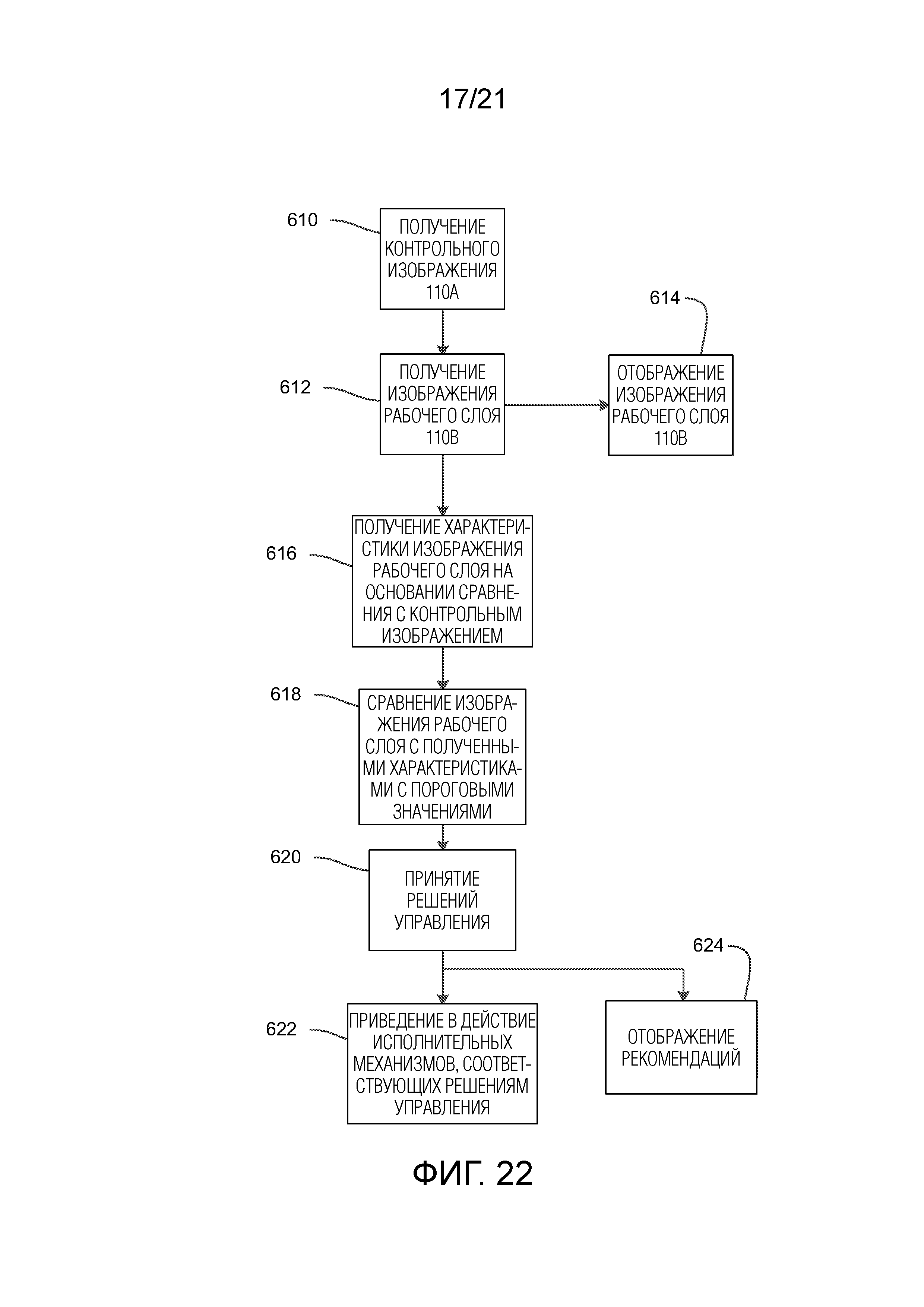
На фиг. 22 представлена схема, показывающая способ мониторинга, контроля осуществления рабочего слоя и обратной связи с оператором.
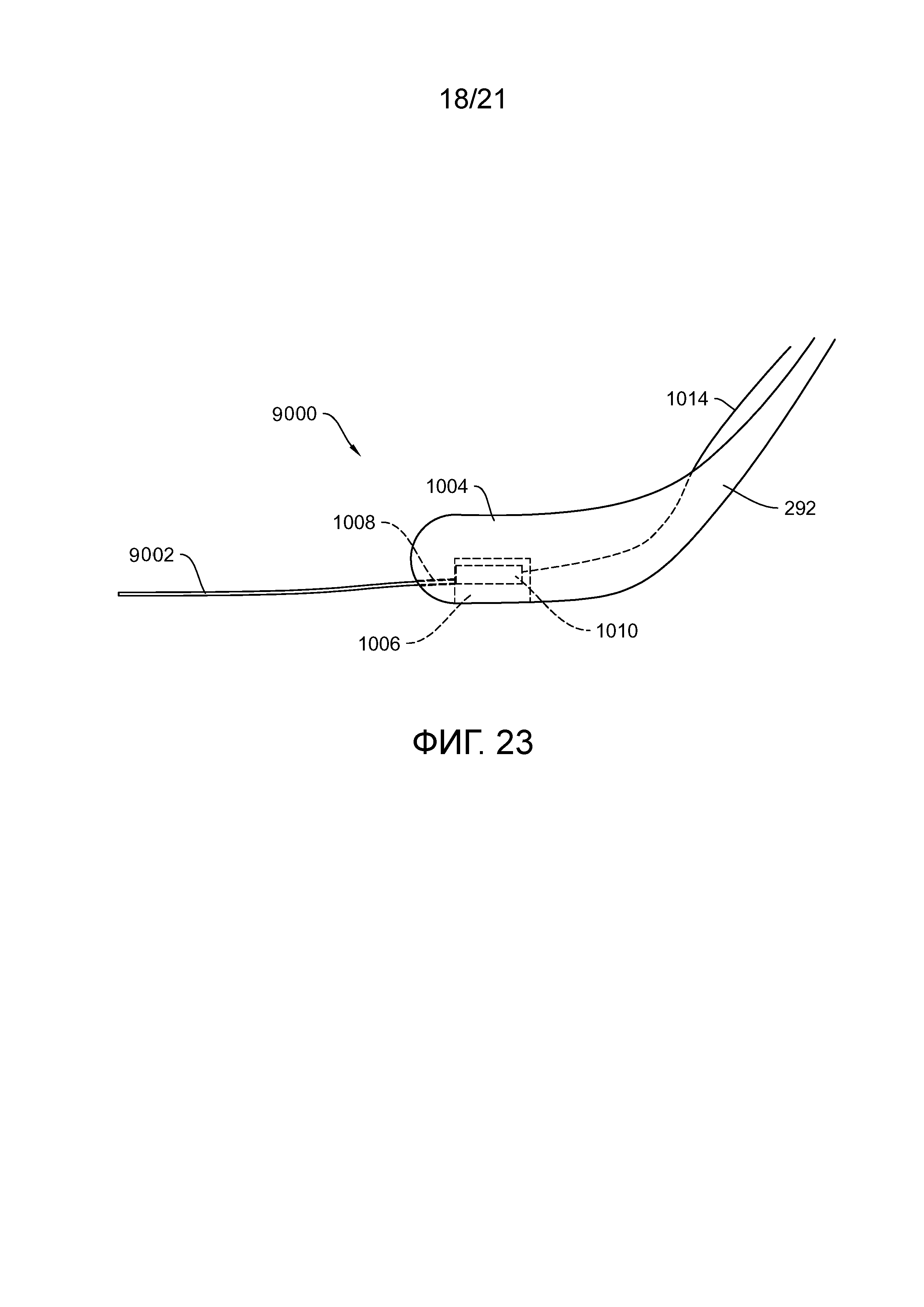
На фиг. 23 представлен вертикальный вид сбоку варианта осуществления уплотнителя семян, выполненного с возможностью функционирования в качестве датчика заделывания борозды, показывающий трубку для текучей среды, соединенную с инструментом, находящимся в корпусе уплотнителя семян.
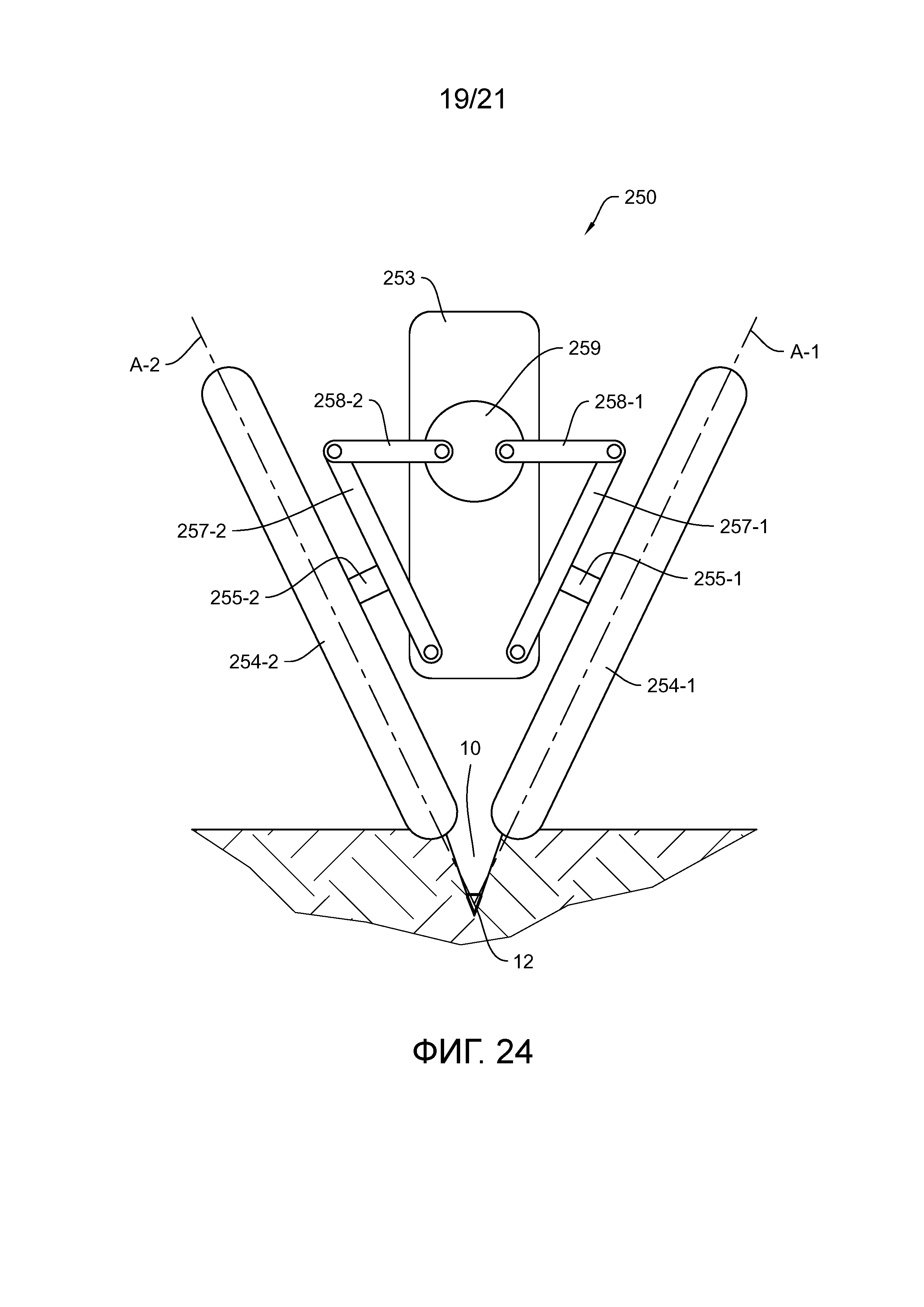
На фиг. 24 представлен вид сзади заделочных колес, обращенных в направлении движения, расположенных над бороздой с семенами.
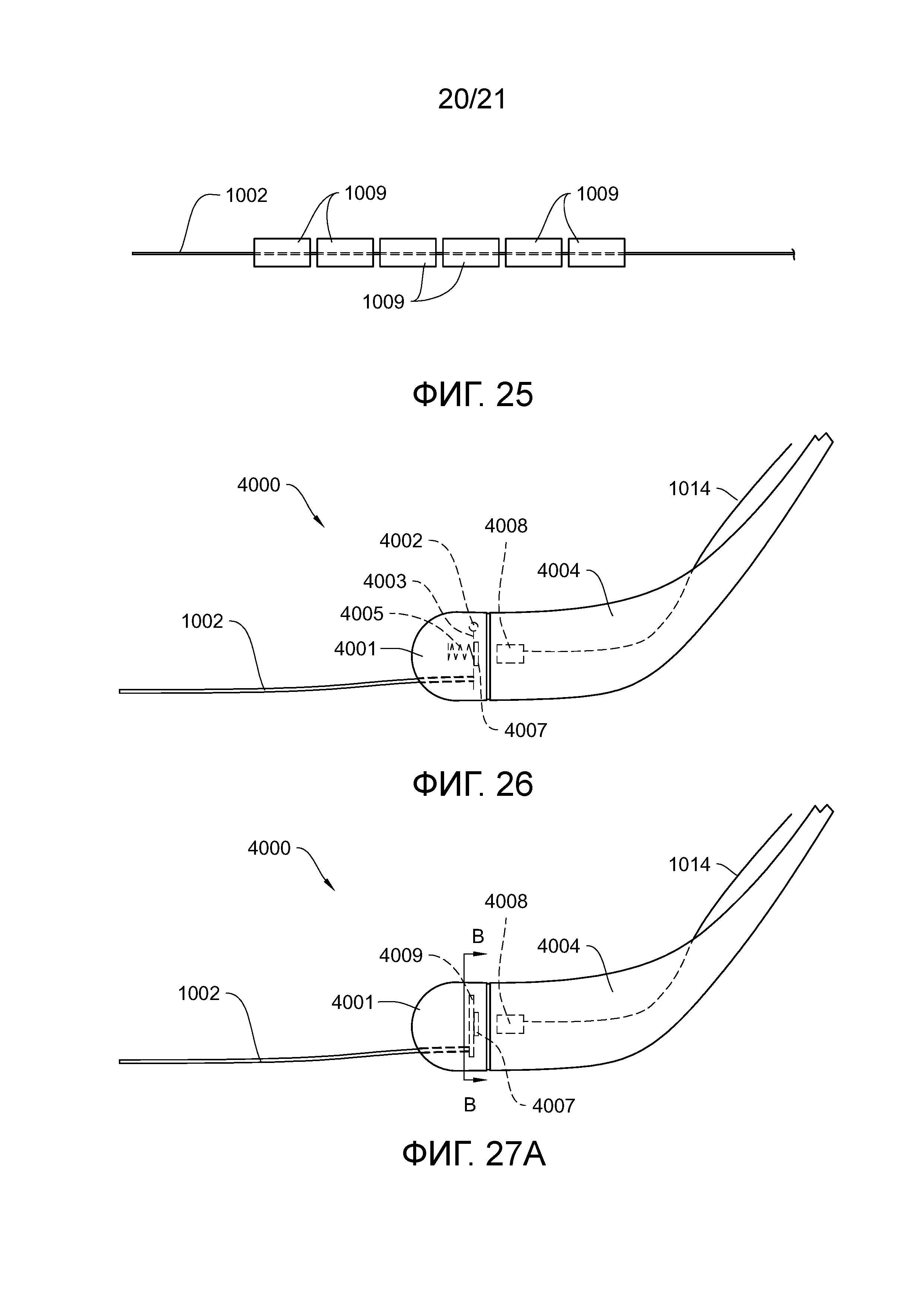
На фиг. 25 представлен вариант осуществления тянущего провода с множеством устройств защиты от износа, находящихся поверх тянущего провода.
На фиг. 26 представлен вертикальный вид сбоку варианта осуществления уплотнителя семян, выполненного с возможностью функционирования в качестве датчика заделывания борозды, показывающий съемную часть уплотнителя семян с тянущим проводом в съемной части.
На фиг. 27A представлен вертикальный вид сбоку другого варианта осуществления уплотнителя семян, выполненного с возможностью функционирования в качестве датчика заделывания борозды, показывающий тянущий провод в съемной части корпуса уплотнителя семян.
На фиг. 27B представлен вид в поперечном разрезе вдоль линий B-B фиг. 27A, показывающий вариант осуществления пластины, находящейся в съемной части корпуса уплотнителя семян.
На фиг. 28 представлен вертикальный вид сбоку другого варианта осуществления уплотнителя семян, выполненного с возможностью функционирования в качестве датчика заделывания борозды, показывающий датчик на эффекте Холла между двумя магнитами.
На фиг. 29 представлен вертикальный вид сбоку уплотнителя семян, выполненного с возможностью функционирования в качестве датчика заделывания борозды, показывающий съемный тянущий провод.
Подробное описания изобретения
Далее со ссылкой на чертежи, на которых одинаковыми ссылочные позиции обозначены идентичные или соответствующие детали на нескольких видах, на фиг. 1 представлен вариант осуществления высевающей секции 200 сельскохозяйственной сеялки. Высевающая секция 200 состоит из рамы 204, шарнирно соединенной с брусом 202 для навешивания рабочих органов с помощью параллелограммного навесного устройства 206, позволяющего каждой высевающей секции 200 двигаться вертикально независимо от бруса 202 для навешивания рабочих органов. Рама 204 функционально поддерживает один или более бункеров 208, дозатор 210 семян, механизм 212 доставки семян, систему 214 регулировки прижимного усилия, узел 220 нарезания семенной борозды, узел 250 заделывания борозды, узел 260 прикатывающих колес и узел 270 очистителя рядка. Следует понимать, что высевающая секция 200, показанная на фиг. 7, может быть предназначена для традиционной сеялки, или высевающая секция 200 может быть для сеялки с центральным наполнением, в каком случае бункеры 208 могут быть заменены одним или более минибункерами и соответственно модифицированной рамой 204, как следует понимать специалистам в данной области.
Система 214 регулировки прижимного усилия выполнена с возможностью прикладывания подъемного и/или прижимного усилия к высевающей секции 200, такой как раскрыта в публикации заявки на патент США 2014/0090585, которая включена в настоящее описание во всей своей полноте путем ссылки.
Узел 220 нарезания семенной борозды содержит пару нарезающих дисков 222, поддерживаемых с возможностью вращения проходящим вниз стержневым элементом 205 рамы 204. Нарезающие диски 222 выполнены с возможностью отклонения наружу и назад для того, чтобы нарезать в почве 11 v-образную борозду 10, когда сеялка проходит по полю. Между нарезающими дисками 222 расположен механизм 212 доставки семян, такой как семяпровод или семенной транспортер, для доставки семян из дозатора 210 семян в нарезанную семенную борозду 10. Глубину семенной борозды 10 регулируют с помощью пары копирующих колес 224, расположенных рядом с нарезающими дисками 222. Копирующие колеса 224 поддерживают с возможностью вращения с помощью рычагов 226 копирующих колес, которые на одном конце шарнирно закреплены на раме 204 вокруг шарнирного пальца 228. Качающийся рычаг 230 шарнирно поддерживают на раме 204 с помощью шарнирного пальца 232. Следует понимать, что вращение качающегося рычага 230 вокруг шарнирного пальца 232 устанавливает глубину борозды 10 за счет ограничения движения вверх рычагов 226 копирующих колес (и таким образом копирующих колес) относительно нарезающих дисков 222. Качающийся рычаг 230 можно расположить с возможностью регулировки с помощью линейного исполнительного механизма 234, установленного на раме 204 высевающей секции и шарнирно соединенного с верхним концом качающегося рычага 230. Линейный исполнительный механизм 234 можно регулировать дистанционно или автоматически приводить в действие, как раскрыто, например, в международной публикации WO2014/186810, которая включена в настоящее описание во всей своей полноте путем ссылки.
Датчик 238 прижимного усилия выполнен с возможностью генерирования сигнала, связанного с величиной силы, прикладываемой копирующими колесами 224 на почву. В некоторых вариантах осуществления шарнирный палец 232 для качающегося рычага 230 может содержать датчик 238 прижимного усилия, такой как оборудованные измерительными приборами стержни, раскрытые в патенте США 8561472, который включен в настоящее описание во всей своей полноте путем ссылки.
Дозатором 210 семян может быть любой коммерчески доступный дозатор семян, такой как дозатор пальцевого типа или вакуумный дозатор семян, такой как VSet® дозатор, поставляемый Precision Planting LLC, 23207 Townline Rd, Tremont, IL 61568.
Узел 250 заделывания борозды содержит рычаг 252 заделочных колес, который шарнирно прикреплен к раме 204 высевающей секции. Пара смещенных заделочных колес 254 прикреплены с возможностью вращения к рычагу 252 заделочных колес и расположены под углом для «заделывания» семенной борозды 10 путем толкания стенок открытой семенной борозды назад вместе поверх размещенных семян 12. Исполнительный механизм 256 можно шарнирно прикрепить на одном конце к рычагу 252 заделочных колес, а на другом его конце к раме 204 высевающей секции для изменения прижимного давления, прикладываемого заделочными колесами 254 в зависимости от почвенных условий. Узел 250 заделочных колес может относиться к типу, раскрытому в международной публикации № WO 2014/066650, которая включена в настоящее описание во всей своей полноте путем ссылки.
Узел 260 прикатывающих колес содержит рычаг 262, шарнирно прикрепленный к раме 204 высевающей секции, и продолжается назад от узла 250 заделочных колес и выровнен с ними. Рычаг 262 поддерживает с возможностью вращения прикатывающее колесо 264. Исполнительный механизм 266 на одном конце шарнирно прикреплен к рычагу 262, а на другом его конце к раме 204 высевающей секции для изменения величины прижимного усилия, прикладываемого прикатывающим колесом 264 для прикатывания почвы поверх семенной борозды 10.
Узел 270 очистителя рядка может представлять собой систему CleanSweep®, поставляемую Precision Planting LLC, 23207 Townline Rd, Tremont, IL 61568. Узел 270 очистителя рядка содержит рычаг 272, шарнирно прикрепленный к переднему концу рамы 204 высевающей секции и выровненный с узлом 220 нарезания борозды. Пара колес 274 очистки рядка прикреплены с возможностью вращения к переднему концу рычага 272. Исполнительный механизм 276 на одном конце шарнирно прикреплен к рычагу 272, а на другом его конце к раме 204 высевающей секции для регулировки прижимного усилия на рычаге для изменения агрессивности действия колес 274 очистки рядка в зависимости от количества растительных остатков и почвенных условий.
Со ссылкой на фиг. 8 и 9 внутри кабины трактора, буксирующего сеялку оператору виден монитор 300. Монитор 300 может обмениваться сигналами с блоком 310 GPS, исполнительным механизмом 256 узла заделывания борозды и исполнительным механизмом 266 узла прикатывающих колес, чтобы обеспечивать оперативное управление узлом 250 заделывания борозды и узлом 260 прикатывающих колес (обсуждается далее) на основании сигналов, генерируемых датчиками 1000 заделывания борозды. Также как обсуждается далее, монитор 300 можно запрограммировать отображать рабочие рекомендации на основании сигналов, генерируемых датчиками 1000 заделывания борозды. Монитор 300 также может обмениваться сигналами с исполнительным механизмом 276 очистителя рядка, системой 214 регулировки прижимного усилия, исполнительным механизмом 234 регулировки глубины, чтобы обеспечивать оперативное управление узлом 270 очистителя рядка, системой 214 регулировки прижимного усилия и узлом 230 нарезания борозды, соответственно.
Датчики заделывания семенной борозды
На фиг. 2 представлен датчик 1000 заделывания семенной борозды для определения, достаточно ли узел 250 заделочных колес заделывает открытую семенную борозду 10 почвой, и/или для определения величины уплотнения почвы поверх семян внутри семенной борозды 10. Датчик 1000 заделывания борозды содержит провод, струну или другой подходящий удлиненный элемент (далее называемый «тянущий провод» 1002), выполненный с возможностью волочения в семенной борозде 10. В общем, когда открытую семенную борозду 10 и тянущий провод 1002 покрывают почвой с помощью узла 250 заделочных колес во время операций посева, датчик 1000 заделывания борозды измеряет или определяет, адекватно ли заделана почвой семенная борозда, путем измерения величины силы, необходимой, чтобы тянуть провод через почву, или путем измерения величины растяжения, тяговой силы или натяжения провода или путем измерения величины давления почвы, воздействующего на провод.
Для адекватного измерения или определения, адекватно ли заделана почвой семенная борозда, конец тянущего провода может оканчиваться рядом с вертикальной осью 1001, проходящий через центр заделочных колес 254 узла 250 заделочных колес высевающей секции 200 или на несколько дюймов назад от вертикальной оси 1001.
Тянущий провод 1002 можно поддерживать с помощью любой подходящей конструкции, которая позволяет волочить задний конец тянущего провода 1002 внутри семенной борозды 10. Например, тянущий провод 1002 можно поддерживать из семяпровода 212, кожуха 290 семяпровода, хвостовика 205 или из другого приспособления 292, выровненного с семенной бороздой. Как представлено на фиг. 10, одним таким приспособлением 292 может быть уплотнитель семян, такой как уплотнитель семян Keeton® или FurrowJet™, которые оба хорошо известны в данной области и поставляются Precision Planting, LLC, 23207 Townline Rd, Tremont, IL 61568.
На фиг. 3 представлен вариант осуществления приспособления 292 для уплотнения семян, выполненного с возможностью функционирования в качестве датчика 1000 заделывания борозды. В этом варианте осуществления пластмассовый корпус 1004 уплотнителя семян 292 содержит полость 1006, образованную внутри корпуса. Задний конец тянущего провода 1002 продолжается наружу из задней части корпуса 1004 через отверстие 1008. Передний конец тянущего провода 1002 можно соединить с инструментом 1010 (таким как тензодатчик, датчик на эффекте Холла или потенциометр), находящимся внутри полости 1006. Сигналы, генерируемые инструментом 1010, подаются на монитор 300 по сигнальным проводам 1014.
В альтернативном варианте осуществления любой тянущий провод, описанный в настоящем документе, такой как тянущий провод 1002, можно заменить трубкой 9002 для текучей среды, а инструмент 1010 представляет собой датчик давления. Фиг. 23 представляет собой модификацию фиг. 3, на которой представлен датчик 9000 заделывания борозды с трубкой 9002 для текучей среды. Все другие аспекты датчика 9000 заделывания могут оставаться такими же, как у датчика 1000 заделывания. В этом варианте осуществления трубка 9002 для текучей среды наполнена текучей средой (газом или жидкостью) и соединена с инструментом 1010. Когда вокруг трубки 9002 для текучей среды добавляется почва, трубка 9002 для текучей среды сжимается, и давление в трубке 9002 для текучей среды увеличивается и измеряется инструментом 1010. В одном варианте осуществления трубка 9002 для текучей среды не может удлиняться в продольном направлении (в соответствии с направлением движения), так что любое изменение давления, которое могло бы быть вызвано удлинением, минимизируется или устраняется. В таком варианте осуществления трубка для текучей среды может иметь жесткую неудлиняемую боковую сторону. В одном варианте осуществления по меньшей мере 20% или по меньшей мере 25% окружности/периметра трубки 9002 для текучей среды являются жесткими, а остальная часть сжимаемая. В поперечном разрезе трубка 9002 для текучей среды по форме может быть круглой, или трубка 9002 для текучей среды может быть квадратной или многоугольной и может иметь одну, две или три жесткие боковые стороны.
Во время использования, когда высевающая секция 200 движется вперед, заделочные колеса 254 узла 250 заделывания борозды заделывают открытую семенную борозду 10, толкая стенки семенной борозды 10 назад вместе поверх размещенных семян 12 и тянущего провода 1002. По мере того, как тянущий провод 1002 тянут через почву заделанной семенной борозды, инструмент 1010 измеряет растяжение тянущего провода 1002 или величину тяговой силы или натяжения, прикладываемого к тянущему проводу 1002. Следует понимать, что если семенная борозда 10 заделана оптимально, создавая хороший контакт семян с почвой, инструмент 1010 будет измерять большее растяжение, натяжение или тяговую силу, чем если семенная борозда заделана плохо. Также, инструмент 1010 может определять, не избыточно ли уплотняет узел 250 заделывания борозды почву или неадекватно ли прикатывает почву в зависимости от растяжения, натяжения или тяговой силы, необходимой, чтобы тянуть тянущий провод 1002 через заделанную борозду.
Вместо измерения тяговой силы или натяжения провода на фиг. 4 представлен вариант осуществления, в которой преобразователь 1012 давления, такой как пьезорезистивный или пьезоэлектрический преобразователь соединен с задним концом тянущего провода 1002 для измерения давления, прикладываемого к преобразователю 1012 окружающей почвой, толкаемой в семенную борозду 10 узлом 250 заделочных колес. Давление, выявленное преобразователем 1012, передается по сигнальным проводам 1014 в монитор 300. Следует понимать, что чем больше почвы толкает в семенную борозду 10 узел 250 заделочных колес, тем больше почва покрывает преобразователь 1012, генерируя измерение более высокого давления. И наоборот, если узел заделочных колес не толкает достаточное количество почвы в семенную борозду для адекватного закрывания семян, преобразователь 1012 будет измерять более низкое давление.
На фиг. 5 представлен другой вариант осуществления, в которой множество тянущих проводов 1002A, 1002B, 1002C уложены вертикально, каждый из, которых соединен с соответствующим инструментом 1010A, 1010B, 101°C (таким как тензодатчик, датчик на эффекте Холла или потенциометр), находящимся внутри полости 1006 для того, чтобы обеспечить перспективный профиль заделывания борозды. Следует понимать, что вместо трех тянущих проводов, как представлено на фиг. 4, может быть только два уложенных тянущих провода или более, чем три уложенных тянущих провода. Кроме того, следует понимать, что каждый из уложенных тянущих проводов 1002 можно оснастить преобразователем давления, как описано выше, или один или более уложенных проводов можно оснастить преобразователем давления, тогда как другие провода соединены с инструментом 1010, находящимся внутри полости 1006. Каждый тянущий провод 1002 может иметь разную геометрию, длину или диаметр по сравнению с другими тянущими проводами 1002. Разные геометрия или диаметры могут обеспечить разный ответ на сигнал для разных зон внутри борозды. Альтернативно, вместо вертикального выравнивания множество тянущих проводов 1002A, 1002B, 1002C можно уложить горизонтально (не показано), или в комбинации горизонтальных и вертикальных комплектов (не показано).
В другом варианте осуществления инструмент 1010A, 1010B и 101°C может подавать электрический ток на множество тянущих проводов 1002A, 1002B и 1002C, соответственно. Если любой из тянущих проводов 1002A, 1002B или 1002C создает контакт, будет образован электрический контур, и инструменты 1010A, 1010B и 101°C тогда могут определить, что тянущие провода 1002A, 1002B и 1002C расположены в контакте друг с другом. Эту информацию можно передавать на монитор 300 по сигнальному проводу 1014. Знание, касается ли множество тянущих проводов 1002A, 1002B и 1002C, обеспечивает информацию о том, определяет ли множество тянущих проводов 1002A, 1002B и 1002C одно и то же место или разные места. При контакте множество тянущих проводов 1002A, 1002B и 1002C определяет одно и то же место и обеспечивает другое измерение для определения того, открыта или заделана борозда. Например, если борозда открыта, множество тянущих проводов 1002A, 1002B и 1002C буду падать под действием силы тяжести и контактировать друг с другом.
В другом варианте осуществления, представленном на фиг. 5A, когда множество тянущих проводов 1002A, 1002B и 1002C или трубка 9002 для текучей среды представляют собой непроводящий материал, на концы множества тянущих проводов 1002A, 1002B и 1002C можно добавить проводящие кончики 1003A, 1003B и 1003C, соответственно, на конце, противоположном инструменту 1010A, 1010B и 1010C, соответственно, или трубке 9002 для текучей среды. В таком варианте осуществления проводящие кончики 1003A, 1003B и 1003C соединены с инструментом 1010A, 1010B и 1010C, соответственно, проводами 1005A, 1005B и 1005C, соответственно.
В другом варианте осуществления, который представлен на фиг. 25, тянущий провод 1002 может дополнительно содержать по меньшей мере одно устройство 1009 защиты от износа, расположенное поверх тянущего провода 1002. Устройство 1009 защиты от износа может представлять собой единственную деталь, или устройство 1009 защиты от износа может содержать множество деталей. В виде единственной детали или в виде множества деталей устройство 1009 защиты от износа может закрывать от более, чем 0 до 100% тянущего провода 1002. В некоторых вариантах осуществления процентная доля покрытия тянущего провода 1002, выходящего из корпуса уплотнителя, составляет 40-60%, около 50%, более чем 90% или 95-99%. Устройство 1009 защиты от износа можно изготовить из любого материала, который увеличивает износостойкость по сравнению с материалом тянущего провода 1002. В одном варианте осуществления устройство 1009 защиты от износа изготовлено из карбида вольфрама. Карбид вольфрама может обеспечить увеличение износостойкости, но карбид вольфрама может быть хрупким. В связи с этим в одном варианте осуществления устройство 1009 защиты от износа, изготовленное из карбида вольфрама, представляет собой множество деталей, таких как показаны на фиг. 25.
На фиг. 26 представлен другой вариант осуществления датчика 4000 заделывания борозды. В этом варианте осуществления датчик 4000 заделывания борозды имеет первый корпус 4004 и второй корпус 4001. Второй корпус 4001 можно снимать с первого корпуса 4004 с помощью любого подходящего приспособления, такого как крепежное средство, гайка и болт, винт и/или зажим. Второй корпус 4001 имеет элемент 4003 (такой как пластина), прикрепленный к шарниру 4002 на одном конце, а на другом конце 4003 расположен тянущий провод 1002. Затем тянущий провод 1002 проходит через второй корпус 4001 и продолжается назад. Пластина 4003 поворачивается вокруг шарнира 4002 и продолжается вниз. Смещающий элемент 4005 (такой как пружина) смещает пластину 4003 вперед в направлении первого корпуса 4004. Для предотвращения продвижения пластины 4003 слишком далеко вперед можно обеспечить стопор (не показано). В нейтральном положении в одном варианте осуществления пластина 4003 расположена перпендикулярно земле. На пластине 4003 расположен передатчик 4007 (такой как магнит). Передатчик 4007 генерирует сигнал (такой как магнитное поле), которое обнаруживает приемник 4008 (такой как датчик на эффекте Холла), расположенный в первом корпусе 4004. В одном варианте осуществления передатчик 4007 можно расположить на пластине 4003 на стороне, обращенной к первому корпусу 4004. Затем приемник 4008 связывают с монитором 300 по сигнальному проводу 1014. Приемник 4008 сперва можно расположить на монтажной плате (не показано), затем соединить с сигнальным проводом 1014, таким как представлен на фиг. 12, на которой другие датчики (такие как датчики отражательной способности или температуры) расположены в первом корпусе 4004 и соединены с монтажной платой.
Когда тянущий провод 1002 тянут в контакте с почвой, пластина 4003 будет поворачиваться назад, и расстояние между передатчиком 4007 и приемником 4008 будет увеличиваться и изменять сигнал (магнитное поле), измеряемое приемником 4008. Когда тянущий провод 1002 изнашивается, датчик 4000 заделывания борозды предусматривает более легкую замену тянущего провода 1002 путем снятия второго корпуса 4001 и его замены новым вторым корпусом 4001. Это экономит время за счет отсутствия необходимости открывать корпус 4004 датчика 4000 заделывания борозды.
Альтернативно предыдущему варианту осуществления и как представлено на фиг. 27A и 27B, упругая пластина 4009 заменяет пластину 4003 и шарнир 4002. Передатчик 4007 расположен на пластине 4009, как и на пластине 4003. В этом варианте осуществления упругая пластина 4009 отклоняется, когда тянущий провод 1002 тянет пластину 4009, и 4009 возвращается в свое первоначальное положение, когда сила не приложена. Как представлено на фиг. 27B, пластина 4009 может иметь форму T.
В другом варианте осуществления, представленном на фиг. 28, передатчик 4007 и приемник 4008 заменены сенсорной системой 4030. Для иллюстративных целей сенсорная система 4030 показана с вариантом осуществления фиг. 27A. Сенсорная система 4030 содержит первый магнит 4031, второй магнит 4032 и датчик 4033 на эффекте Холла. Первый магнит 4031 и второй магнит 4032 расположены в корпусе/корпусах (таких как 1004, 4001, 4004) таким образом, чтобы одинаковые полюса (как N-N или S-S) были ориентированы друг к другу. Датчик 4033 на эффекте Холла расположен равноудаленно от первого магнита 4031 и второго магнита 4032, так что поле, измеренное в этой средней точке, составляет ноль. Выгода наличия этой конфигурации состоит в том, что весь диапазон напряжений для датчика 4033 на эффекте Холла доступен для измерения поля в сжатом пространстве по сравнению с наличием только половины диапазона напряжений, доступной для считывания поля на расстоянии от и до бесконечности. Первый магнит 4031 расположен на пластине 4009 или пластине 4003.
Несмотря на то, что представлено с двумя корпусами 4001 и 4004, любой из вариантов осуществления фиг. 26, 27A или 28 можно использовать в виде единственного корпуса (не показано).
В другом варианте осуществления, представленном на фиг. 29, любой из тянущих проводов 1002, описанных в настоящем документе, можно изготовить в виде двух частей, базовой секции 1002B тянущего провода и конца 1002A тянущего провода, и соединить с помощью съемного соединения 1011. Наличие съемного конца 1002A тянущего провода обеспечивает замену тянущего провода без необходимости открывания корпуса 1004 (или корпуса 4001).
Снова со ссылкой на фиг. 8 сигналы, генерируемые датчиком 1000, 3000, 4000 заделывания борозды, можно передавать по сигнальным проводам 1014 на монитор 300 в виде фактического измерения, или монитор 300 можно запрограммировать преобразовывать и отображать на экране монитора реальную силу, натяжение или давление, измеренное датчиком 1000, 9000, 4000 в семенной борозде 10 относительно требуемого диапазона сил, натяжений или давлений. Если требуемая представленная сила, натяжение или давление расположен за пределами требуемого диапазона, прижимное усилие на заделочном колесе 254 можно отрегулировать. Регулирование прижимного усилия заделочных колес можно проводить вручную путем регулировки положения традиционной спиральной пружины, соответствующего отдельным настройкам предварительной нагрузки. Альтернативно, если узел 250 заделочных колес оборудован исполнительным механизмом 256 узла колес для заделывания борозды, который описан ранее, оператор может вручную привести в действие исполнительный механизм 256 узла колес для заделывания борозды при необходимости увеличения или уменьшения величины прижимного усилия, прикладываемого заделочными колесами 254, чтобы удерживать силу, натяжение или давление, измеренное датчиком 1000 заделывания борозды, в пределах требуемого диапазона. Альтернативно, монитор 300 можно запрограммировать автоматически приводить в действие исполнительный механизм 256 узла колес для заделывания борозды для увеличения или уменьшения прижимного усилия на заделочных колесах 254 в зависимости от того, определяет ли датчик 1000 заделывания борозды, что сила, натяжение или давление на тянущем проводе (проводах) 1002 падает ниже или превышает заданную минимальную и максимальную пороговую силу, натяжение или давление. В другом варианте осуществления вместо регулировки прижимного усилия на узле 250 заделочных колес с помощью традиционной спиральной пружины или исполнительного механизма, угол заделочных колес можно отрегулировать на увеличение или уменьшение агрессивности заделочных колес. Например, как известно в данной области, можно предоставить исполнительный механизм или механическое регулирование (не показано) для уменьшения или увеличения угла заделочных колес относительно направления движения или относительно вертикали, регулируя таким образом количество почвы, которое заделочные колеса толкают в семенную борозду. Если предоставлен исполнительный механизм угла заделочных колес для регулировки угла заделочных колес, оператор может привести в действие исполнительный механизм вручную, или монитор 300 можно запрограммировать автоматически приводить в действие исполнительный механизм для регулировки агрессивности заделочных колес в зависимости от силы, натяжения или давления, определяемых датчиком 1000, 9000, 4000 заделывания борозды.
В другом варианте осуществления, представленном на фиг. 24, угол развала заделочных колес можно отрегулировать так, чтобы оси A-1 и A-2 через заделочные колеса 254-1 и 254-2 пересекали семена 12 в борозде 10. Для размещения семян 12 в борозде 10 можно использовать датчики рабочего слоя, описанные ниже. Положение системы 250 заделывания относительно любых датчиков рабочего слоя известно, и заделочные колеса 254-1 и 254-2 можно отрегулировать с помощью исполнительного механизма 259 для регулировки угла развала заделочных колес 254-1 и 254-2. Альтернативно, угол развала можно отрегулировать пересекать дно борозды 10. В некоторых вариантах осуществления можно принять, что семена 12 расположены на дне борозды 10. Дно борозды 10 можно определит с помощью любого инструмента, который определяет глубину борозды 10. Неограниченные примеры инструментов, которые могут определять глубину борозды 10, раскрыты в CN101080968, CN201072894, DE102004011302, JP0614628, JP2069104, JP04360604, JP08168301, JP2001299010, JP2006345805, US4413685, US4775940, US5060205, US6216795, US8909436, US20150289438, US20160037709, WO2012102667, WO2015169323 и предварительной заявке на патент США №62/365585, которые все включены сюда путем ссылки в отношении раскрытой темы определения расстояния/глубины. тогда угол можно определить, предположив, что борозда расположен в центре между заделочными колесами 254-1 и 254-2. В варианте осуществления на фиг. 24 система 250 заделывания содержит элемент 253 рамы системы заделывания. Заделочные колеса 254-1 и 254-2 прикреплены к осям 255-1 и 255-2, соответственно. Оси 255-1 и 255-2 соединены с рычагами 257-1 и 257-2 осей, соответственно, которые шарнирно соединены с элементом 253 рамы и рычагами 258-1 и 258-2 исполнительного механизма, соответственно, которые шарнирно соединены с исполнительным механизмом 259. Исполнительный механизм 259 связан с монитором 300, при этом исполнительный механизм 259 принимает сигналы для вращения, которое заставляет рычаги 258-1 и 258-2 исполнительного механизма двигаться ближе или дальше от центра рамы 253 системы заделывания, вызывая изменение угла рычагов 257-1 и 257-2 осей относительно элемента 253 рамы системы заделывания, которое, в свою очередь, изменяет углы развала заделочных колес 254-1 и 254-2. Несмотря на то, что показан один исполнительный механизм 259, может быть два исполнительных механизма 259-1 и 259-2 с рычагом 258-1 оси, соединенным с исполнительным механизмом 259-1, и рычагом 258-2 оси, соединенным с исполнительным механизмом 259-2, обеспечивая независимое регулирование углов развала заделочных колес 254-1 и 254-2 (не показано).
Регулировка Прикатывающих Колес
Альтернативно или дополнительно, узел 260 прикатывающих колес можно отрегулировать на основании натяжения, тяговой силы или давления, выявленного тянущим проводом (проводами) 1002. Регулировку прижимного усилия прикатывающих колес можно проводить вручную путем регулировки положения традиционной спиральной пружины, соответствующего отдельным настройкам предварительной нагрузки, или, если узел 260 прикатывающих колес оборудован исполнительным механизмом 266, который описан ранее, оператор может вручную привести в действие исполнительный механизм 266, или монитор 300 можно запрограммировать автоматически приводить в действие исполнительный механизм 266 для увеличения или уменьшения величины прижимного усилия, прикладываемого на прикатывающее колесо 264, чтобы удерживать силу, натяжение или давление, измеренное датчиком 1000, 9000, 4000 заделывания борозды в пределах требуемого диапазона.
Калибровка Контрольного Датчика и Датчика Заделывания Борозды
Контрольный датчик 1100 (Фиг. 2, 6 и 7) можно предусмотреть для «калибровки» датчика 1000, 9000, 4000 заделывания борозды с целью учета условий, которые могут оказывать воздействие на свойства коэффициента трения почвы, включая такие факторы, как скорость сеялки, глубина борозды, текстура почвы, влажность почвы и плотность почвы. Как лучше всего показано на фиг. 6 и 7, контрольный датчик 1100 содержит элемент 1102, воспринимающий нагрузки от сопротивления движению, который выполнен с возможностью волочения через почву за пределами семенной борозды 10. Контрольный датчик 1100 можно расположить впереди узла 220 нарезания борозды, как показано на фиг. 2, или элемент 1102, воспринимающий нагрузки от сопротивления движению, можно установить между высевающими секциями 200 (не показано). Элемент 1102, воспринимающий нагрузки от сопротивления движению, поддерживают рычагом 1104, который можно располагать с возможностью регулировки относительно копирующего колеса 1106 для изменения глубины проникновения элемента 1102, воспринимающего нагрузки от сопротивления движению, относительно поверхности почвы. Рычаг 1104 оснащен тензодатчиком 1110 для определения растяжения, прикладываемого на рычаг 1104, когда элемент 1102, воспринимающий нагрузки от сопротивления движению, тащат через почву. Сигнальные провода 1114 передают изменение электрического сопротивления в тензодатчике 1110 на монитор 300. Монитор 300 запрограммирован сопоставлять изменение электрического сопротивления с выявленной деформацией рычага 1104, которую тогда можно сопоставить с сигналами, генерируемыми датчиком 1000 заделывания борозды, для определения диапазона силы, натяжения или давления, которые датчик 1000 заделывания борозды должен будет выявить, если семенная борозда адекватно заделана узлом 250 заделывания борозды.
В других вариантах осуществления контрольным датчиком 1100 может быть сила проникновения высевающей секции 200. Силу проникновения следует измерять непосредственно с помощью датчика 223 силы, такого как тензодатчик, находящегося на оси 225 диска сошника, как представлено на фиг. 2. Силу проникновения высевающей секции 200 также можно определить путем вычитания силы копирующего колеса, измеренной датчиком 238 прижимного усилия, из приложенной силы, которую прикладывает система 214 регулировки прижимного усилия и масса высевающей секции 200.
В других вариантах осуществления контрольным датчиком 1100 может быть электропроводность или коэффициент отражения почвы. Подходящие датчики электропроводности и коэффициента отражения описаны в WO 2015/171908, которая включена в настоящее описание путем ссылки во всей своей полноте. В одном варианте осуществления, представленном на фиг. 12, приспособление 292 уплотнителя семян фиг. 3 дополнительно содержит датчики 350a и 350b отражательной способности, датчики 370f и 370r электропроводности уплотнителя 400 семян, показанного на фиг. 4a к WO 2015/171908. Несмотря на то, что в этом варианте осуществления показан беспроводной передатчик 62-1, который обменивается данными с монитором 300, обмен данным с монитором 300 может быть проводным. Также на фиг. 12 (с фиг. 4A к WO 2015/171908) показан датчик 360 температуры, съемная часть 492, охватываемая соединительная часть 472 и охватывающая соединительная часть 474.
В другом варианте осуществления контрольным датчиком 1100 может быть геопространственная информация о типе почвы на основании местонахождения GPS, такая как данные USDA SSURGO, которые могут быть полезными при смене зон в поле. Данные для каждой зоны в поле могут быть контрольными.
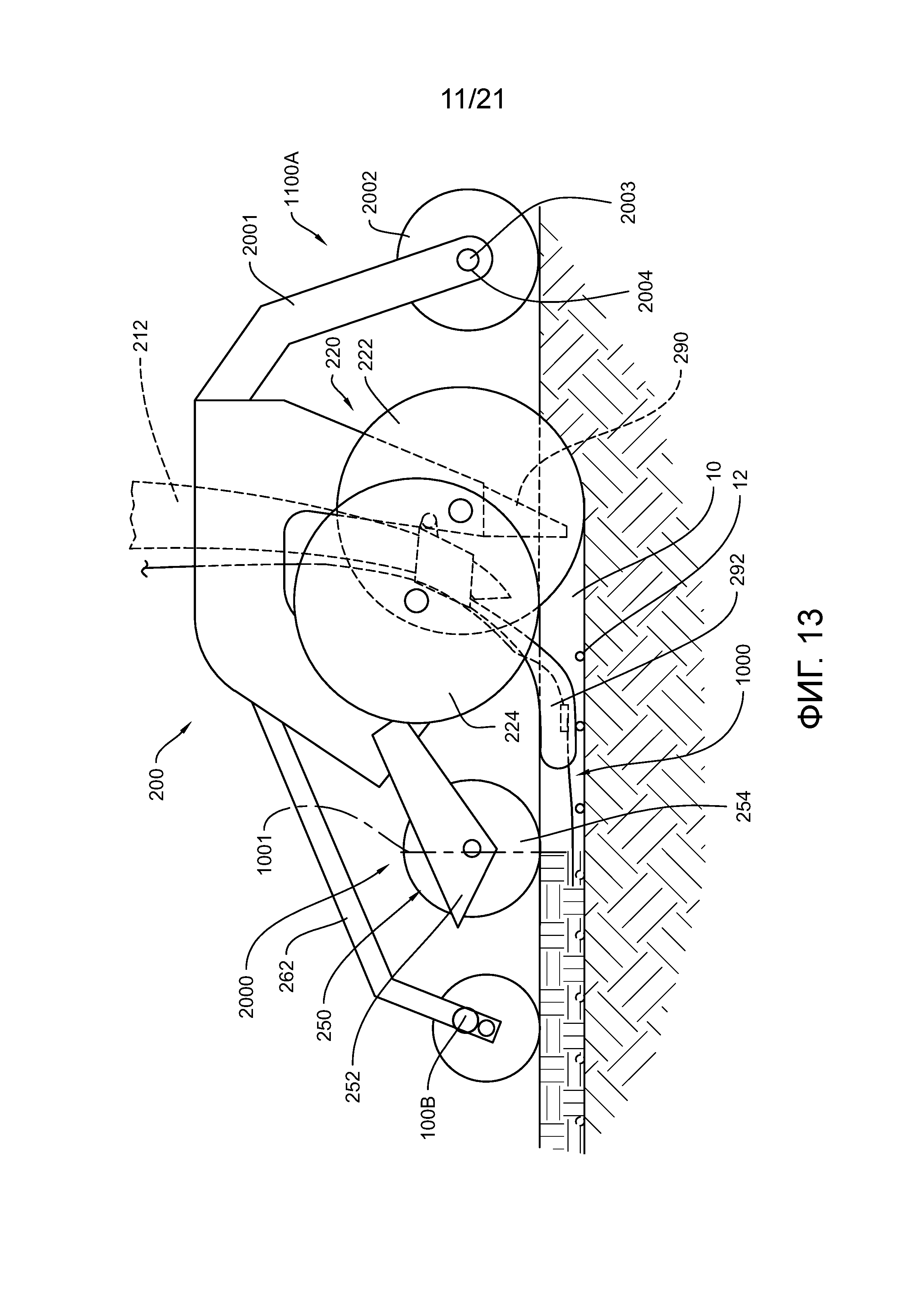
Альтернативный контрольный датчик 1100A, представленный на фиг. 13, содержит рычаг 2001 сошника, прикрепленный к высевающей секции 200, причем сошник 2002 прикреплен к рычагу 2001 сошника с помощью оси 2003. На оси 2003 датчик 2004 силы, такой как датчик 238 прижимного усилия, измеряет силу, которую сошник 2002 передает на ось 2003. Датчик 2004 силы обменивается данными с монитором 300.
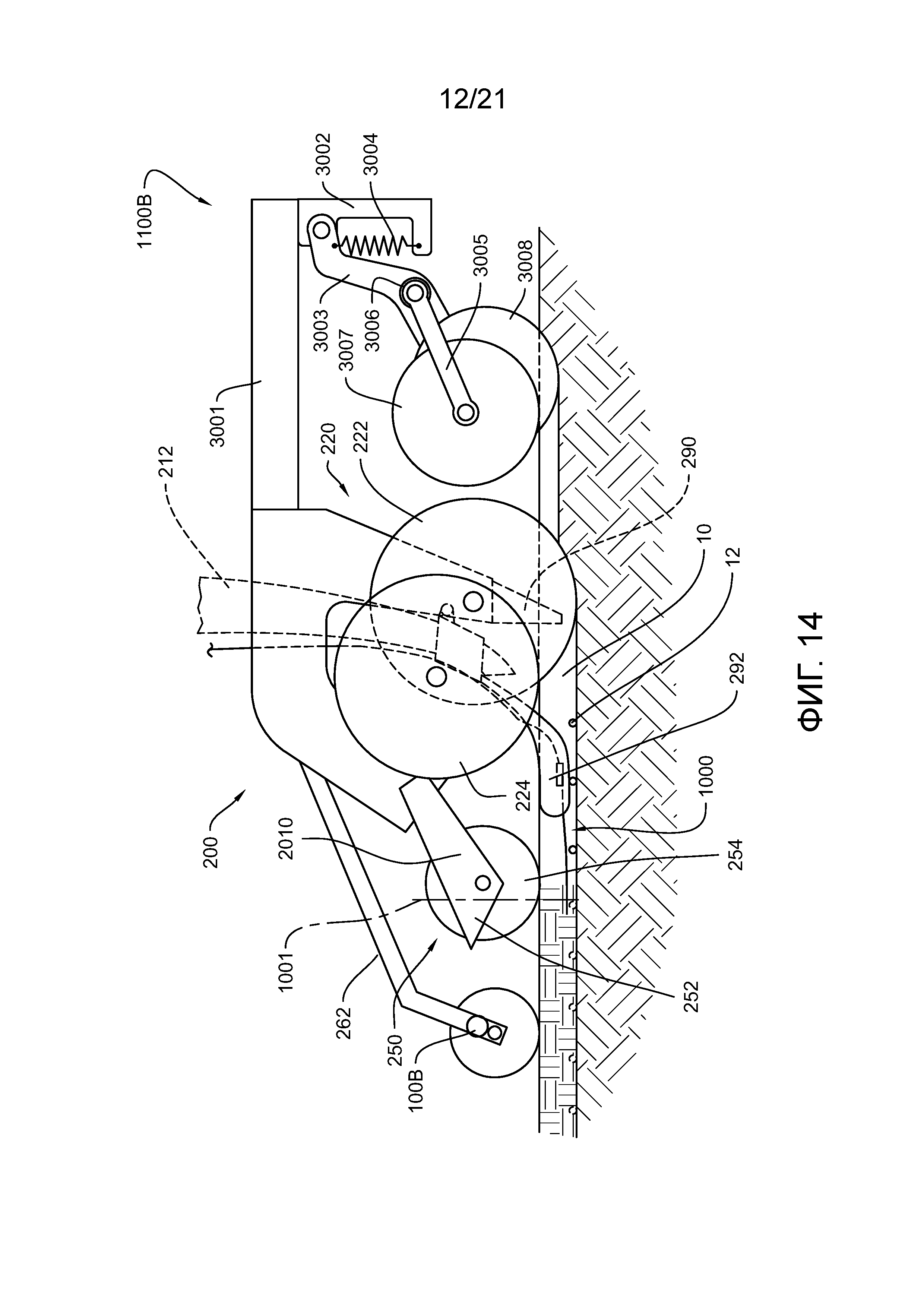
Альтернативный контрольный датчик 1100B, представленный на фиг. 14, содержит рычаг 3001, установленный на высевающей секции 200 (или альтернативно на брусе 202 для навешивания рабочих органов), а на противоположном конце рычага 3001 расположен кронштейн 3002. К кронштейну 3002 шарнирно прикреплен рычаг 3003 сошника, а силовое устройство 3004, такое как пружина, выполнено с возможностью соединения рычага 3003 сошника с кронштейном 3002 для приложения к рычагу 3003 сошника фиксированной силы. Альтернативно, силовым устройством может быть пневматическое устройство, гидравлическое устройство, электромеханическое устройство или электрогидравлическое устройство. Сошник 3008 установлен с возможностью качения на рычаге 3003 сошника. Рычаг 3005 копирующего колеса шарнирно соединен с рычагом 3003 сошника, а на рычаге 3005 копирующего колеса установлено с возможностью качения копирующее колесо 3007. Датчик 3006 угла расположен на шарнирном соединении между рычагом 3005 копирующего колеса и рычагом 3003 сошника. Примеры датчика 3006 угла включают, но без ограничения, поворотный потенциометр или датчик на эффекте Холла. Датчик 3006 угла обменивается данными с монитором 300. В этом варианте осуществления силовое устройство 3004 прикладывает известную силу к сошнику 3008. Когда изменяется твердость почвы, рычаг 3005 копирующего колеса будет поворачиваться, а датчик 3006 угла измеряет величину поворота.
Другим контрольным датчиком, который можно использовать в сочетании с датчиком 1000, 9000, 4000 заделывания борозды, является скорость высевающей секции 200. Когда скорость движения изменяется, измеренная сила, натяжение или давление будут изменяться непосредственно с изменением скорости. Скорость высевающей секции 200 можно определить с помощью любого подходящего устройства, такого как спидометр на тракторе (скорость колес трактора), изменение расстояния GPS с течением времени или радар измерения скорости хода. Любое из этих устройств может обмениваться данными с монитором 300.
Обратная Связь с Оператором для Регулировки Узла Заделочных Колес
На фиг. 9 представлена схематичная иллюстрация системы 500, которая задействует датчики 1000, 9000, 4000 заделывания борозды и контрольные датчики 1100 для обеспечения обратной связи с оператором и для регулировки узла 250 заделочных колес и узла 260 прикатывающих колес высевающей секции 200 сеялки. На стадиях 510 и 512 контрольный датчик 1100 определяет растяжение (с помощью тензодатчика 1110), создаваемое в рычаге 1104. На стадии 512 растяжение, создаваемое в рычаге 1104 1104, сопоставляют для определения диапазона силы, натяжения или давления, который необходимо выявить, если семенная борозда адекватно заделана узлом 250 заделывания борозды. На стадии 514 датчик 1000, 9000, 4000 заделывания борозды определяет силу, натяжение или давление, прикладываемое почвой к тянущему проводу (проводам) 1002. На стадии 516 сила, натяжение или давление, прикладываемое почвой к тянущему проводу (проводам) 1002 датчика 1000, 9000, 4000 заделывания борозды, можно представлять оператору на монитор 300 в кабине трактора относительно коррелирующего диапазона силы, натяжения или давления, который датчик 1000, 9000, 4000 заделывания борозды должен будет выявить, если семенная борозда адекватно заделана узлом 250 заделывания борозды. На стадии 518 решения управления принимают на основании сравнения установленного диапазона с силой, натяжением или давлением, выявленным этим датчиком 1000, 9000, 4000 заделывания борозды. На стадии 520 узел 250 заделочных колес или узел 260 прикатывающих колес можно регулировать с помощью монитора 300, генерирующего сигналы для приведения в действие одного или более соответствующих исполнительных механизмов 256, 266, и/или на стадии 522, соответствующие рекомендации можно представить оператору на дисплее монитора.
Другие Системы Датчиков Борозды
На фиг. 10 представлен вариант осуществления системы 2000 датчиков борозды. Система 2000 датчиков борозды имеет один или оба из датчика 2010 борозды и датчика 2020 земли. Датчик 2010 борозды расположен на системе 250 заделывания после узла 220 нарезания в направлении движения для определения расстояния до дна семенной борозды 10. Датчик 2020 земли расположен на высевающей секции 200 после датчика 2010 борозды в направлении движения для определения расстояния до поверхности почвы 1. Как датчик 2010 борозды, так и датчик 2020 земли расположены на фиксированном расстоянии до нижней части заделочных колес 254, и оба связаны с монитором 300. Глубину (HG) заделочных колес 254 в почве можно определить путем вычитания расстояния, измеренного датчиком 2020 земли, из расстояния от датчика 2020 земли до нижней части заделочных колес 254. Расстояние (HF) заделочных колес 254 выше дна семенной борозды 10 можно определить путем вычитания расстояния от датчика 2010 борозды до нижней части заделочных колес 254 из расстояния, измеренного датчиком 2010 борозды. один или оба этих измерений также можно использовать в комбинации с измерениями датчика 1000, 9000, 4000 заделывания борозды для определения эффективности заделывания. Датчик 2010 борозды и датчик 2020 земли каждый независимо может представлять собой ультразвуковой датчик, радар или лазер.
В другом варианте осуществления, который представлен на фиг. 11, датчик 2280 угла можно расположить на соединении рычага 252 заделочных колес и рамы 204, и датчик 2280 угла связан с монитором 300. Датчик 2280 угла может быть такой же, как датчик 280 угла рычага шарнира в WO 2014/066650. Для определения эффективности заделывания семенной борозды результат угла датчика 2280 угла можно объединить с измерениями датчика 1000, 9000, 4000 заделывания борозды. Примеры датчика 2280 угла содержат, но без ограничения, поворотный потенциометр и датчик на эффекте Холла.
Визуализация Рабочего Слоя
Со ссылкой на фиг. 2 датчики 100 рабочего слоя, такие как раскрыты в заявке PCT № PCT/US 2016/031201, которая включена в настоящее описание во всей своей полноте путем ссылки, можно расположить на высевающей секции 200 для генерирования сигнала или изображения, типичного для плотности почвы или других характеристик почвы по всей интересующей области почвы, далее называемой «рабочий слой» 104. Датчики 100 рабочего слоя могут определять эффективность заделывания борозды с определением, имеется ли какое-либо пустое пространство в заделанной борозде. Датчики рабочего слоя можно использовать в сочетании с датчиком 1000, 9000, 4000 заделывания борозды.
На Фиг. 15, 17 и 19 схематично представлены альтернативные варианты осуществления датчика 100 рабочего слоя. Типичное изображение или сигнал, генерируемый датчиком 100 рабочего слоя, далее называется «изображение рабочего слоя» 110. В одном отдельном варианте применения, обсуждаемом далее, датчики 100 рабочего слоя можно установить на высевающей секции 200 сеялки (фиг. 1) для генерирования изображения 110 рабочего слоя семенной борозды, когда сеялка движется по полю. Изображение 110 рабочего слоя можно выводить на монитор 300, который виден оператору внутри кабины трактора, а сеялку можно оборудовать различными исполнительными механизмами для регулировки сеялки на основании характеристик рабочего слоя 104, определяемых по изображению 110 рабочего слоя.
Датчик 100 рабочего слоя для генерирования изображения 110 рабочего слоя может содержать систему радиолокационного зондирования, ультразвуковую систему, акустическую систему звукового диапазона, систему электрических токов или любую другую подходящую систему для генерирования электромагнитного поля 102 через рабочий слой 104 для получения изображения 110 рабочего слоя. Следует понимать, что глубина и ширина рабочего слоя 104 может варьировать в зависимости от сельскохозяйственного орудия и выполняемой операции.
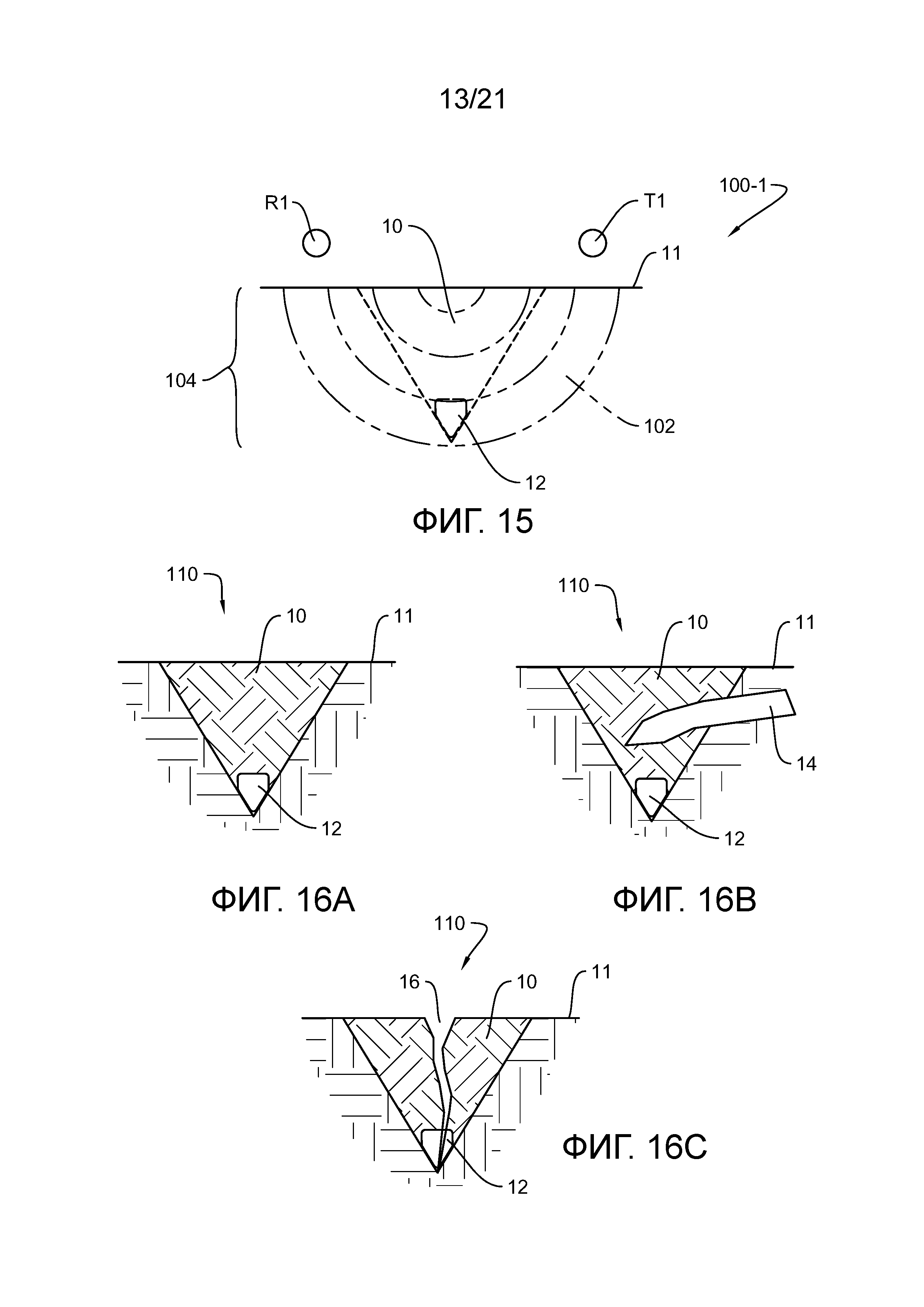
На фиг. 15 представлена схематичная иллюстрация одного варианта осуществления датчика 100-1 рабочего слоя, расположенного относительно семенной борозды 10, образованной в почве 11 сеялкой, при этом семенная борозда 10 содержит интересующую область или рабочий слой 104 почвы. В этом варианте осуществления датчик 100-1 рабочего слоя содержит передатчик (T1), расположенный на одной стороне семенной борозды 10, и приемник (R1), расположенный на другой стороне семенной борозды 10, для получения электромагнитного поля 102 через семенную борозду для генерирования изображения 110 рабочего слоя.
В некоторых вариантах осуществления датчик 100 рабочего слоя может содержать систему радиолокационного зондирования подповерхности, такую как любая из следующих коммерчески доступных систем: (1) StructureScan™ Mini HR, поставляемая GSSI в Nashua, New Hampshire; (2) 3d-Radar GeoScope™ Mk IV, соединенную с многоканальной антенной 3d-Radar VX-Series и/или DX-Series, все поставляются 3d-Radar AS в Trondheim, Norway; или (3) MALA Imaging Radar Array System, поставляемую MALA Geoscience в Mala, Sweden. В таких вариантах осуществления коммерчески доступную систему можно установить на сеялку или другой орудие, или можно установить на прицеп, который движется с орудием; в каждом случае система предпочтительно выполнена с возможностью создания изображения рабочего слоя в интересующей области (например, семенной борозде). В некоторых вариантах осуществления изображение 110 рабочего слоя можно генерировать из сигналов, подаваемых датчиком 100 рабочего слоя с использованием коммерчески доступного программного обеспечения, такого как GPR-SLICE (например, версия 7.0), поставляемого GeoHiRes International Ltd. located в Borken, Germany.
На Фиг. 16A-16C представлены типичные примеры изображений 110 рабочего слоя, генерируемых датчиком 100-1 рабочего слоя фиг. 15, показывающих различные характеристики семенной борозды 10, включая, например, глубину борозды, форму борозды, глубину семян 12, глубину семян относительно глубины борозды, растительные остатки 14 в борозде и пустое пространство 16 внутри борозды. Как описано более подробно позже, изображения 110 рабочего слоя можно использовать для определения других характеристик рабочего слоя 104, включая, например, контакт семян с почвой, процентную долю заделанной борозды, процентную долю верхней половины заделанной борозды, процентную долю нижней половины заделанной борозды, влажность почвы, и т.д.
На фиг. 17 схематично представлен на виде сверху другой вариант осуществления датчика 100-2 рабочего слоя, расположенного относительно семенной борозды 10. В этом варианте осуществления передатчик (T1) расположен на одной стороне семенной борозды 10, первый приемник (R1) расположен на другой стороне семенной борозды 10, а второй приемник (R2) расположен рядом и назад от передатчика (T1). Фиг. 18A является типичной иллюстрацией изображения 110 рабочего слоя, генерируемого через борозду между передатчиком (T1) и первым приемником (R1)), а фиг. 18B является типичной иллюстрацией изображения 110 рабочего слоя, генерируемого между передатчиком (T1) и вторым приемником (R2), предоставляющего изображение нетронутой почвы рядом с семенной бороздой.
На фиг. 19 представлена вертикальная проекция, схематично иллюстрирующая другой вариант осуществления датчика 100-3 рабочего слоя, расположенного относительно семенной борозды 10. В этом варианте осуществления датчик 100-3 рабочего слоя содержит множество пар передатчиков и приемников, находящихся выше и поперек семенной борозды 10.
На фиг. 20 представлена типичная иллюстрация изображения 110 рабочего слоя, генерируемого датчиком 100-3 рабочего слоя фиг. 5, которое обеспечивает вид не только семенной борозды, но также части почвы рядом с каждой стороной семенной борозды.
Для каждого варианта осуществления датчика 100-1, 100-2, 100-3 рабочего слоя частота работы датчиков 100 рабочего слоя и вертикальное положение передатчиков (T) и приемников (R) над почвой и промежуток между передатчиками (T) и приемниками (R) выбирают, чтобы минимизировать соотношение сигнала и шума, захватывая в то же время также требуемую глубину и ширину интересующей области почвы (рабочий слой 104), для которого генерируют изображение 110 рабочего слоя.
Визуализация Рабочего Слоя Для Вариантов Применения Сеялки
На фиг. 1 представлен один пример конкретного варианта применения датчиков 100 рабочего слоя, находящихся на высевающей секции 200 сельскохозяйственной сеялки. Высевающая секция 200 содержит датчик 100А рабочего слоя, расположенный на переднем конце высевающей секции 200, и датчик 100В рабочего слоя, расположенный на заднем конце высевающей секции 200. Передний и задний датчики 100А, 100B рабочего слоя могут содержать любой из описанных ранее вариантов осуществления датчиков 100-1, 100-2, 100-3 рабочего слоя.
Передний датчик 100А рабочего слоя выполнен с возможностью генерирования контрольного изображения рабочего слоя (далее «контрольное изображение слоя») 110A почвы перед воздействием сеялки на почву, тогда как задний датчик 100В рабочего слоя генерирует изображение 110В рабочего слоя, которым в этом примере является изображение заделанной семенной борозды 10, в которой семена были размещены и закрыты почвой. По причинам, объясненным далее, желательно получить как контрольное изображение 110A, так и изображение 110В рабочего слоя для анализа характеристик почвы через рабочий слой 104.
Следует понимать, что для переднего и заднего датчиков 100А, 100B рабочего слоя, указанных на фиг. 1, можно задействовать любой из описанных ранее вариантов осуществления 100-1, 100-2 или 100-3. Однако, следует понимать, что если задействованы варианты осуществления 100-2 или 100-3, передний датчик 100А рабочего слоя можно исключить, потому что варианты осуществления 100-2 и 100-3 выполнены с возможностью генерирования изображения 110 рабочего слоя нетронутой почва рядом с семенной бороздой 10, которые могут служить в качестве контрольного изображения 110A слоя.
Следует понимать, что вместо расположения датчиков 100 рабочего слоя, как показано на фиг. 1, датчики рабочего слоя можно расположить после узла 270 очистителя рядка и перед узлом 220 нарезания борозды или в одном или более других мест между нарезающими борозду дисками 222 и заделочными колесами 254 или прикатывающим колесом 264 в зависимости от интересующей области или характеристик почвы.
Регулировка Сеялки и Обратная Связь с Оператором С Использованием Визуализации рабочего слоя
На фиг. 21 представлена схематичная иллюстрация системы 600, в которой задействованы датчики 100 рабочего слоя для обеспечения обратной связи с оператором и для регулировки высевающей секции 200 сеялки. Датчики 100А, 100B рабочего слоя выполнены с возможностью генерирования контрольного изображения 110A слоя нетронутой почвы и изображения 110В рабочего слоя заделанной семенной борозды (т.е. после размещения семян, покрытия почвой с помощью узла 250 заделочных колес и уплотнения почвы с помощью узла 260 прикатывающих колес). Как описано ранее, датчиками 100А, 100B рабочего слоя могут быть отдельные датчики рабочего слоя, находящиеся впереди и позади высевающей секции 200, как представлено на фиг. 7, или датчики 100А, 100B рабочего слоя могут представлять собой единственный датчик рабочего слоя с передатчиками (T) и приемниками (R), выполненными с возможностью генерирования как контрольного изображения 110A слоя и изображения 110В рабочего слоя.
Изображение 110В рабочего слоя можно передавать и представлять оператору на монитор 300, содержащий дисплей, контроллер и пользовательский интерфейс, такой как графический пользовательский интерфейс (GUI), внутри кабины трактора.
Монитор 300 может обмениваться сигналами с блоком 310 GPS, исполнительным механизмом 276 очистителя рядка, системой 214 регулировки прижимного усилия, исполнительным механизмом 234 регулировки глубины, исполнительным механизмом 256 узла заделывания борозды и исполнительным механизмом 266 узла прикатывающих колес для обеспечения оперативного управления сеялкой на основании характеристик изображения 110В рабочего слоя.
Например, если изображение 110В рабочего слоя показывает, что остатков в семенной борозде 10 больше заданного порогового значения (как объяснено ниже), монитор 300 генерирует сигнал приведения в действие исполнительного механизма 276 очистителя рядка для увеличения прижимного усилия очистителя рядка. В качестве другого примера, если глубина семян меньше чем заданное пороговое значение (как объяснено ниже), монитор 300 генерирует сигнал приведения в действие системы 214 регулировки прижимного усилия для увеличения прижимного усилия и/или для приведения в действие исполнительного механизма 234 регулировки глубины для регулировки копирующих колес 234 относительно нарезающих дисков 232 для увеличения глубины борозды. Также, если глубина семян больше, чем заданное пороговое значение, монитор 300 генерирует сигнал приведения в действие системы 214 регулировки прижимного усилия для уменьшения прижимного усилия и/или для приведения в действие исполнительного механизма 234 регулировки глубины для уменьшения глубины борозды. В качестве другого примера, если верхняя часть борозды имеет более, чем пороговый уровень пустого пространства (как объяснено ниже), монитор 300 генерирует сигнал приведения в действие исполнительного механизма 256 узла колес для заделывания борозды для увеличения прижимного усилия на заделочных колесах 254. В качестве другого примера, если нижняя часть борозды имеет более чем пороговый уровень пустого пространства (как объяснено ниже), монитор 300 генерирует сигнал приведения в действие исполнительного механизма 266 узла прикатывающих колес для увеличения прижимного усилия на прикатывающем колесе 264.
В других примерах на изображении 110В рабочего слоя можно идентифицировать и/или анализировать (например, определять глубину, площадь, объем, плотность или другие качества или количества) интересующих подпочвенных особенностей, таких как дренажные линии, большие камни или уплотненные слои, обусловленные обработкой почвы и другим движением по полю. Такие подпочвенные особенности можно отображать пользователю на мониторе 300 и/или идентифицировать с помощью монитора 300 с использованием эмпирической корреляции между свойствами изображений и набором подпочвенных особенностей, которые, как ожидается, встречаются в поле. В одном таком примере область, проходимую копирующими колесами (или другими колесами) сеялки (или трактора или другого орудия или транспортного средства), можно проанализировать для определения глубины и/или плотности почвы в слое уплотнения под колесами. В некоторых таких примерах область изображения рабочего слоя можно разделить на подобласти для анализа на основании предполагаемых подпочвенных особенностей в таких подобластях (например, область, проходимую копирующими колесами, можно проанализировать на уплотнение).
В других примерах монитор 300 может оценивать свойство почвы (например, влажность почвы, органическое вещество или электропроводность, уровень грунтовых вод) на основании свойств изображения 110В рабочего слоя и отображать свойство почвы пользователю в виде числового (например, среднего или текущего) значения или пространственной карты свойств почвы в местах с привязкой к местности в поле, связанных с каждым измерением свойств почвы (например, путем сопоставления измерений с совпадающими местами с привязкой к местности, передаваемыми блоком 310 GPS).
Альтернативно или дополнительно, монитор 300 можно запрограммировать отображать рабочие рекомендации на основании характеристик изображения 110В рабочего слоя. Например, если на изображении 110В рабочего слоя идентифицировано, что семена 12 неправильно расположены в борозде 10, или если семена 12 размещены в основании борозды неравномерно, или если промежуток между семенами 12 в борозде не совпадает с предполагаемым промежутком между семенами на основании сигналов, генерируемых датчиком семян или скоростью дозатора семян, такой неправильный промежуток, неравномерное расположение или другие несовпадения с предполагаемым промежутком могут быть следствием излишней скорости, являющейся причиной отскакивания семян внутри борозды или излишним вертикальным ускорением высевающей секции. В связи с этим, монитор 300 можно запрограммировать рекомендовать уменьшение скорости посева или предложить увеличение прижимного усилия (если отсутствует автоматическая регулировка, как описано ранее) для уменьшения вертикального ускорения высевающей секции сеялки. Также в тех случаях, когда другие исполнительные механизмы 276, 214, 234, 256, 266 не объединены с контроллером монитора, монитор можно запрограммировать отображать оператору рекомендации провести ручные или удаленные регулировки, который описан ранее на основании характеристик изображения 110В рабочего слоя.
На фиг. 22 представлены стадии способа регулировки сеялки и предоставления обратной связи с оператором. На стадиях 610 и 612 датчик (датчики) 100 рабочего изображения генерируют контрольное изображение 110A и изображение 110В рабочего слоя. На стадии 614 изображение 110В рабочего слоя можно представить оператору на монитор 300 в кабине трактора. На стадии 616 контрольное изображение 110A слоя сравнивают с изображением 110В рабочего слоя для получения характеристики изображения рабочего слоя. На стадии 618 изображение 110В рабочего слоя с полученными характеристиками сравнивают с заданными пороговыми значениями. На стадии 620 принимают решения управления на основании сравнения изображения 110В рабочего слоя с полученными характеристиками с заданными пороговыми значениями. На стадии 622 компоненты сеялки можно регулировать с помощью монитора 300, генерируя сигналы приведения в действие одного или более соответствующих исполнительных механизмов 276, 214, 234, 256, 266, и/или на стадии 624 можно представить оператору соответствующие рекомендации на дисплее монитора.
Для получения характеристики изображения 110В рабочего слоя на стадии 616 монитор 300 сравнивает одну или более характеристик (например, плотность) контрольного изображения 110A с такими же характеристиками изображения 110В рабочего слоя. В некоторых вариантах осуществления можно генерировать изображение с полученными характеристиками, содержащее только части изображения рабочего слоя, отличающиеся от контрольного изображения по меньшей мере на пороговое значение. Изображение с полученными характеристиками тогда можно использовать для идентификации и определения признаков изображения 110В рабочего слоя, таких как форма борозды, глубина борозды, остатки в борозде, семена и размещение семян внутри борозды, пустые пространства внутри борозды и различия плотности почвы внутри борозды.
Например, для определения глубины семян, семена идентифицируют или распознают из изображения 110В рабочего слоя путем определения областей внутри изображения рабочего слоя, имеющих размер или форму, соответствующие семенам, и имеющих диапазон плотности эмпирически соответствующий семенам.
После того, как область идентифицирована в качестве семян, можно легко измерить или определить вертикальное положение семян относительно поверхности почвы.
В качестве другого примера, величину остатков в борозде можно определить путем (a) определения площади поперечного сечения борозды (на основании различий в плотности почвы между контрольным изображением 110A и изображением 110В рабочего слоя); (b) путем идентификации областей внутри борозды, имеющих диапазон плотности, эмпирически соответствующий остаткам; (c) подсчета площади областей, соответствующих остаткам; и (d) деления площади остатков на площадь поперечного сечения борозды.
Различные варианты осуществления изобретения были описаны выше с целью пояснения его деталей и чтобы позволить специалисту в данной области техники создать и использовать изобретение. Детали и признаки раскрытых вариантов осуществления не предназначены для ограничения, так как специалистам в данной области техники будет легко понятно множество вариантов и модификаций.
Реферат
Изобретение относится к области сельского хозяйства, а именно к сельскохозяйственному орудию, имеющему датчик заделывания борозды. Сельскохозяйственное орудие включает узел нарезания борозды, узел заделывания борозды и датчик заделывания борозды. Датчик заделывания борозды выполнен с возможностью установки на сельскохозяйственное орудие для определения, достаточно ли семенная борозда заделывается почвой, чтобы обеспечить хороший контакт семян с почвой. Датчик заделывания борозды также может определять величину уплотнения почвы поверх семян внутри семенной борозды. Датчик заделывания борозды может быть выполнен, в том числе, в виде уплотнителя семян, из которого продолжается тянущий провод. Когда открытую семенную борозду и тянущий провод покрывают почвой, инструментальное оборудование измеряет или определяет, адекватно ли заделана почвой семенная борозда, путем измерения величины силы, необходимой, чтобы тянуть провод через почву, или путем измерения величины растяжения, тяговой силы или натяжения провода или путем измерения величины давления почвы, воздействующего на провод. Датчик заделывания борозды может представлять собой другие датчики для определения характеристик почвы. Использование изобретения позволит повысить качество заделывания борозды с семенами и тем самым улучшить их всхожесть. 3 н. и 40 з.п. ф-лы, 34 ил.
Комментарии