Система регулирования давления - RU2742020C2
Код документа: RU2742020C2
Чертежи


Описание
Изобретение относится к системе регулирования давления для выдачи жидкости с заданным давлением жидкости из отверстия для жидкости, включающей в себя эластичный мешок с жидкостной фазой и газовой фазой, причем отверстие для жидкости выполнено в рабочем положении эластичного мешка в нижней области эластичного мешка, по меньшей мере, два нажимных элемента, которые прилегают к противоположным стенкам эластичного мешка, по меньшей мере, один приводной блок, который выполнен для приведения в действие, по меньшей мере, одного нажимного элемента, причем, по меньшей мере, два нажимных элемента могут перемещаться друг к другу посредством приведения в действие, по меньшей мере, одного нажимного элемента, и блок управления, который для сообщения соединен, по меньшей мере, с одним приводным блоком.
US 6,491,661 B1 раскрывает систему регулирования давления для офтальмологического хирургического устройства, которая включает в себя эластичный мешок, два нажимных элемента в виде пластин, две пружины, клапан, датчик давления и два приводных блока. Эластичный мешок соединен гибким шлангом, надетым на отверстие для жидкости эластичного мешка, с клапаном. Одна из пластин установлена с возможностью движения, а другая пластина зафиксирована не разъясненными более подробно дополнительными элементами, причем оба приводных блока выполнены для приведения в действие установленной подвижно пластины. Пластины расположены параллельно друг к другу и прилегают к противоположным стенкам эластичного мешка, вследствие чего эластичный мешок зажат между пластинами. Посредством уменьшения расстояния между пластинами за счет приведения в движение установленной подвижно пластины двумя приводными блоками может повышаться давление в мешке и, как следствие, давление жидкости, с которым жидкость выдается из эластичного мешка, причем при помощи датчика давления и интегрированного блока управления может поддерживаться заданное давление в эластичном мешке. Далее система регулирования давления имеет датчик объемного расхода, который измеряет интенсивность выдачи жидкости из эластичного мешка, вследствие чего может вычисляться количество уже выданной из эластичного мешка жидкости.
У известной из US 6,491,661 B1 системы регулирования давления недостатком оказалось то, что, прежде всего, при плоских эластичных мешках можно очень плохо регулировать давление жидкости, с которым жидкость выдается из эластичного мешка. Уже незначительное уменьшение расстояния между пластинами приводит к большому изменению давления. Однако, прежде всего, в области медицинской хирургии тонкая настройка давления жидкости, выданного системой регулирования давления, обязательна, для того чтобы удерживать риски при операции на минимально возможном уровне.
Задача данного изобретения предоставить систему регулирования давления, у которой давление жидкости, с которым жидкость выдается из эластичного мешка, может лучше регулироваться.
Согласно изобретению эта задача решается вследствие того, что эластичный мешок имеет отверстие для газа, которое доходит до газовой фазы, и что система регулирования давления имеет блок нагнетания и удаления воздуха, который для сообщения соединен с блоком управления и который примыкает к отверстию для газа эластичного мешка, причем блок нагнетания и удаления воздуха регулирует посредством подвода газа в эластичный мешок и/или отвода газа из эластичного мешка давление жидкости, выданной через отверстие для жидкости.
Вследствие этого получено то преимущество, что давление жидкости, с которым жидкость выдавливается из эластичного мешка, может регулироваться независимо от давления, которое посредством перемещения друг к другу пластин оказывается на газовую фазу и жидкостную фазу в эластичном мешке. Давление в эластичном мешке и таким образом давление жидкости регулируется исключительно блоком нагнетания и удаления воздуха посредством подвода газа в эластичный мешок и/или отвода газа из эластичного мешка, причем благодаря перемещению друг к друг пластин уменьшается объем эластичного мешка, и, как следствие, уменьшается также объем газовой фазы в эластичном мешке. Благодаря незначительному объему газовой фазы давление жидкости у отверстия для жидкости очень быстро адаптируется к обусловленному подводом газа в эластичный мешок и/или отводом газа из эластичного мешка изменению давления в эластичном мешке. Посредством регулирования давления в мешке блоком нагнетания и удаления воздуха давление жидкости может настраиваться очень тонко, и благодаря удержанию малого объема газовой фазы система регулирования давления реагирует очень быстро. Предпочтительно блок управления определяет через давление в эластичном мешке и через поперечное сечение отверстия для жидкости количество жидкости, которое выдается за секунду из эластичного мешка.
Предпочтительно эластичный мешок имеет по существу плоскую форму. Наиболее предпочтительно эластичный мешок образован из сложенной (завернутой) пластиковой пленки, которая сварена по своим краям. Вследствие этого получено то преимущество, что нажимные элементы, которые имеют предпочтительно также плоскую форму и образованы предпочтительно пластинами, прилегают по плоскости к стенкам эластичного мешка. Целесообразно поверхность пластин, которой пластины прилегают к стенкам эластичного мешка, равна или больше, чем поверхности стенок. Предпочтительно пластины расположены параллельно друг к другу и параллельно к эластичному мешку. Вследствие этого получено то преимущество, что при перемещении пластин друг к другу весь эластичный мешок сдавливается, и вздутия в эластичном мешке могут по большей части предотвращаться. Кроме того, получено то преимущество, что эластичный мешок может вплоть до минимальных остатков полностью опорожняться, и таким образом предотвращается ненужная трата (расточительность) жидкости.
Предпочтительно отверстие для газа образовано первой трубой, которая в рабочем положении эластичного мешка вдается с верхней стороны эластичного мешка в газовую фазу или которая в рабочем положении эластичного мешка вдается с нижней стороны эластичного мешка в газовую фазу. Отверстие для жидкости образовано предпочтительно второй трубой. Благодаря исполнению отверстия для газа и отверстия для жидкости в виде труб они при эластичном мешке, образованном сложенной (завернутой) и сваренной по краям пластиковой пленкой, могут очень легко укладываться во время изготовления между завернутой пластиковой пленкой и за один процесс сварки свариваться с нею. Если первая труба вдается с нижней стороны эластичного мешка в газовую фазу, получено то преимущество, что отверстие для газа и отверстие для жидкости расположены на одной стороне, а именно в рабочем положении эластичного мешка на нижней стороне эластичного мешка, вследствие чего работа с эластичным мешком облегчается.
Целесообразно отверстие для газа и/или отверстие для жидкости в каждом случае имеют ломкий предохранитель, причем отверстие для газа и отверстие для жидкости освобождаются лишь посредством излома соответствующего ломкого предохранителя. Вследствие этого получено то преимущество, что с одной стороны с первого взгляда может устанавливаться целостность мешка и его содержимого, а с другой стороны может предотвращаться открытие эластичного мешка по неосторожности. В этой связи также предпочтительно оснащать отверстие для жидкости и/или отверстие для газа соединением Люэра, вследствие чего эластичный мешок может легко соединяться с другим медицинским устройством или медицинскими элементами.
Предпочтительно система регулирования давления имеет растягивающие элементы, причем эластичный мешок может растягиваться растягивающими элементами поперек к движению, по меньшей мере, одного нажимного элемента при перемещении друг к другу нажимных элементов. Растягивающими элементами могут быть, например, пружины, сервоприводы, канаты с грузами и т.д. Благодаря растягивающим элементам эластичный пластиковый мешок растягивается, вследствие чего предотвращается его оседание за счет силы тяжести, и оптимальная работоспособность системы регулирования давления может обеспечиваться в любой момент времени.
В одном предпочтительном варианте осуществления система регулирования давления имеет боковые стенки, которые примыкают в каждом случае сбоку к пластинам, для того чтобы охватывать эластичный мешок. Боковые стенки могут быть выполнены либо неподатливыми, причем при перемещении друг к другу нажимных элементов нажимные элементы перемещаются мимо боковых стенок, либо боковые стенки могут быть выполнены также подвижными в себе, наподобие телескопической штанги. Благодаря наличию боковых пластин получено то преимущество, что при высоком давлении предотвращается непропорционально большое расширение в боковом направлении, в частности выпучивание, эластичного мешка, вследствие чего даже при высоком давлении обеспечена хорошая возможность регулирования давления жидкости.
В дальнейшем предпочтительном варианте осуществления система регулирования давления имеет, по меньшей мере, один датчик, причем, по меньшей мере, один датчик выполнен для обнаружения уровня жидкости между газовой фазой и жидкостной фазой и расположен на нажимном элементе или нанесен на эластичный мешок. Вследствие этого получено то преимущество, что блоком управления на основе данных датчика может очень точно определяться еще имеющееся количество жидкости в эластичном мешке.
Дальнейшие предпочтительные варианты осуществления соответствующей изобретению системы регулирования давления разъясняются в дальнейшем более подробно на основе чертежей. На чертежах показано:
фиг.1 и 2 - первый вариант осуществления соответствующей изобретению системы регулирования давления в каждом случае на схематичном виде сбоку;
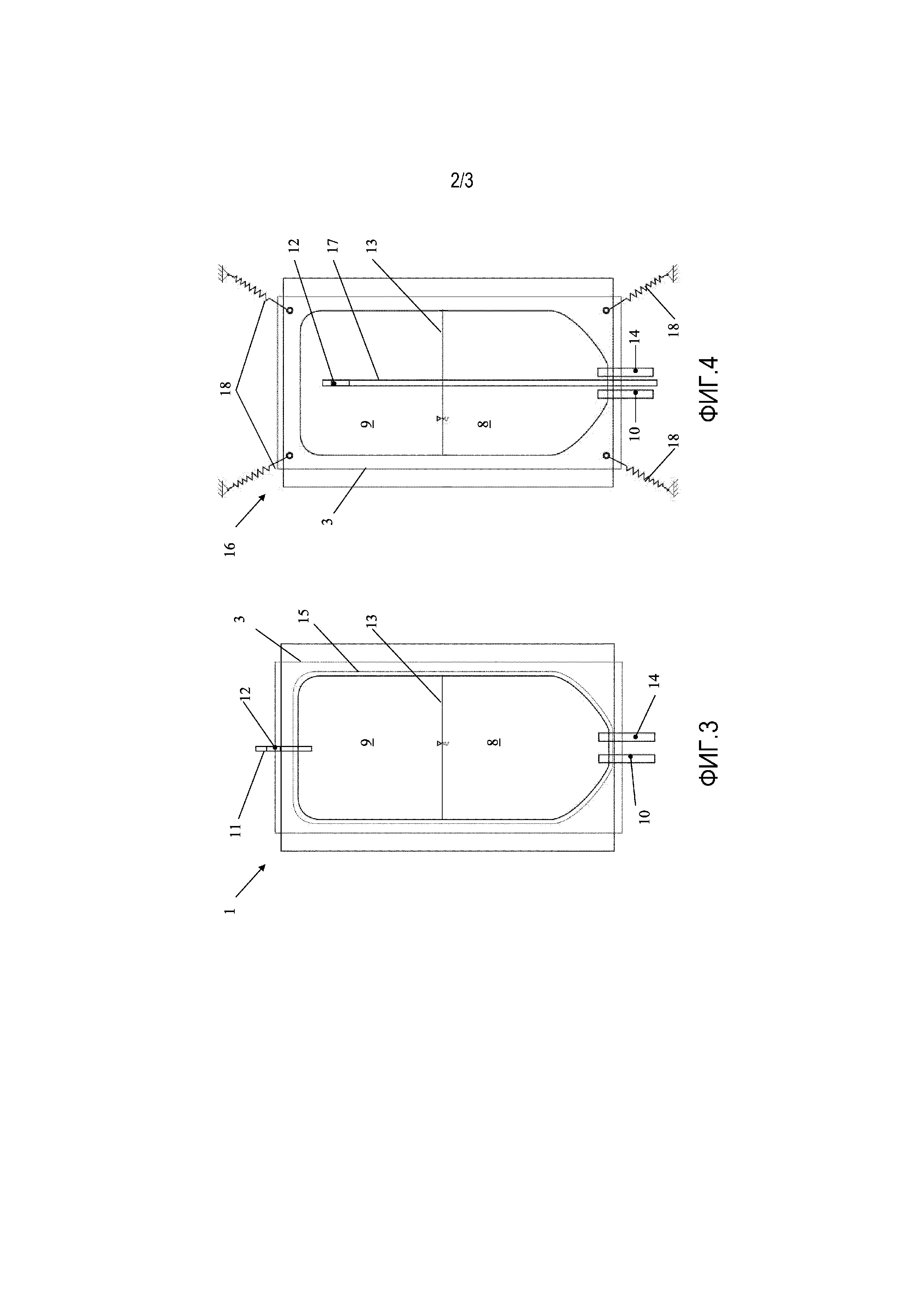
фиг.3 - первый вариант осуществления соответствующей изобретению системы регулирования давления согласно фиг.1 на схематичном виде в разрезе;
фиг.4 и 5 - в каждом случае другой вариант осуществления соответствующей изобретению системы регулирования давления на схематичном виде в разрезе; и
фиг.6 - соответствующая изобретению система регулирования давления согласно фиг.1 при использовании в офтальмологическом хирургическом устройстве на схематичном изображении.
Фиг.1 и 2 показывают первый вариант осуществления соответствующей изобретению системы 1 регулирования давления в каждом случае на схематичном виде сбоку. Система 1 регулирования давления включает в себя два образованных пластинами 2 нажимных элемента, эластичный мешок 3, приводной блок 4, блок 5 управления, блок 6 нагнетания и удаления воздуха и десять датчиков 7. Эластичный мешок 3 имеет жидкостную фазу 8 и газовую фазу 9 и ориентирован в своем рабочем положении вертикально. Жидкость жидкостной фазы 8 может быть образована, например, инфузионной жидкостью, в частности физиологическим раствором, или жидкостью промывания. Газ газовой фазы 9 предпочтительно образован воздухом. Эластичный мешок 3 имеет в нижней области отверстие впрыска и отверстие для жидкости, которое образовано второй трубой 10, и через которое жидкость может выдаваться из жидкостной фазы 8 эластичного мешка 3. Отверстие впрыска изображено на фиг.3 и служит для впрыска жидкости или добавок, которые должны добавляться к жидкости в эластичном мешке 3, например, перед началом операции. Отверстие впрыска образовано третьей трубой 14. В верхней области эластичного мешка 3 выполнено отверстие для газа, которое образовано первой трубой 11. Первая труба 11 доходит до газовой фазы 9 эластичного мешка 3 и соединена с блоком 6 нагнетания и удаления воздуха.
Пластины 2 расположены параллельно и на расстоянии друг от друга и прилегают в каждом случае к противоположным стенкам эластичного мешка 3. Вследствие этого эластичный мешок 3 расположен с зажатием между пластинами 2. Одна пластина 2 зафиксирована, а другая пластина 2 установлена с возможностью движения, причем установленная подвижно пластина 2 может приводиться в движение приводным блоком 4 таким образом, что пластины 2 могут перемещаться друг к другу, вследствие чего можно уменьшать расстояние 21 между пластинами 2. Предпочтительно приводной блок 4 образован приводимым в действие электродвигателем приводом с зубчатой рейкой, приводимым в действие электродвигателем приводом с резьбовым штоком, цилиндром с пневматическим приводом или цилиндром с гидравлическим приводом.
Как датчики 7, так и блок 6 нагнетания и удаления воздуха и приводной блок 4 соединены для сообщения с блоком 5 управления. Для лучшей наглядности на фиг.1 и 2 не все десять датчиков 7 соединены с блоком 5 управления. Датчики 7 образованы оптическими датчиками, причем они выдают при этом сигнал датчика, который идентифицирует обнаружение жидкости, если их измерительные наконечники прилегают в области жидкостной фазы 8 к мешку 3. Подобные оптические датчики известны специалисту. Датчики 7 расположены с одинаковыми интервалами между собой вдоль вертикальной в рабочем положении системы 1 регулирования давления оси на пластине 2. Вследствие этого блоком 5 управления может при помощи датчиков 7 обнаруживаться уровень 13 жидкости в эластичном мешке 3.
Блок 6 нагнетания и удаления воздуха включает в себя пропорциональный клапан давления и компрессорный блок для сжатия окружающего воздуха.
Как в первой трубе 11, так и во второй трубе 10 и третьей трубе 14 в каждом случае выполнены ломкие предохранители 12, причем трубы 10, 11 и 14 освобождаются только для работы при операции, если ломкие предохранители 12 были надломлены.
Далее более подробно описывается принцип действия соответствующей изобретению системы 1 регулирования давления, причем исходят из полностью заполненного жидкостью эластичного мешка 3. Для этого либо заново заполненный эластичный мешок 3 был расположен между пластинами 2, либо уже расположенный между пластинами 2 эластичный мешок 3 заполняется при помощи дополнительного устройства через третью трубу 14 жидкостью.
При помощи пропорционального клапана давления блока 6 нагнетания и удаления воздуха регулируется под управлением блока 5 управления посредством подвода газа в эластичный мешок 3 и/или отвода газа из эластичного мешка 3 давление в эластичном мешке 3. Давление в эластичном мешке 3 устанавливается при этом предпочтительно непосредственно на блоке 5 управления. Давление жидкости во второй трубе 10 благодаря весу жидкости немного выше, чем установленное пропорциональным клапаном давления в эластичном мешке 3 давление, причем для предотвращения нежелательного капания из второй трубы 10 эластичный мешок 3 может краткосрочно нагружаться при помощи блока 6 нагнетания и удаления воздуха давлением меньшим, чем давление окружающей среды. При наличии дополнительного клапана, подключенного ко второй трубе 10, эта функция может отпадать. У системы 1 регулирования давления выдача жидкости контролируется только блоком 6 нагнетания и удаления воздуха, причем уже незначительно более высокое давление, чем давление окружающей среды, или давление равное давлению окружающей среды является в зависимости от количества жидкости в эластичном мешке 3 достаточным, для того чтобы выдавать жидкость из эластичного мешка 3. Датчики 7 во время выдачи жидкости из второй трубы 10 постоянно регистрируют уровень 13 жидкости, причем при принижении заранее заданного уровня 13 жидкости блок 5 управления подает командный сигнал приводному блоку 4 перемещать пластины 2 друг к другу, для того чтобы сокращать расстояние 21 между пластинами 2. Благодаря перемещению пластин 2 друг к другу уменьшается объем эластичного мешка 3, и, как следствие, уменьшается объем газовой фазы 9.
У изображенной на фиг.1 соответствующей изобретению системы 1 уровень 13 жидкости опущен до половины, и эластичный мешок 3 заполнен только наполовину. У изображенной на фиг.2 соответствующей изобретению системы 1 расстояние 21 между пластинами 2 было уменьшено вдвое по сравнению с расстоянием 21 согласно фиг.1, вследствие чего уровень 13 жидкости снова поднялся до верха в эластичном мешке 3. Если уровень 13 жидкости в дальнейшем снова опускается до половины, то эластичный мешок 3 заполнен всего лишь одной четвертью от изначального количества жидкости. Этот процесс продолжается до тех пор, пока эластичный мешок 3 не будет пустым, или пока эластичный мешок 3 не будет опорожнен до заданного количества.
Блок 5 управления на основе знания расстояния 21 между пластинами 2 и измеренного датчиками 7 положения уровня 13 жидкости выполнен для того, чтобы регистрировать количество имеющейся в эластичном мешке 3 жидкости, причем точность измерения количества имеющейся жидкости увеличивается при сокращении расстояния 21. Из перемещения пластин 2 друг к другу и получающегося из этого сокращения расстояния 21 между пластинами 2 следует таким образом не только уменьшение объема газовой фазы 9, вследствие чего предотвращается инерционность системы 1 при изменениях давления, но и при остающемся неизменным количестве датчиков 7 повышается также точность измерения количества жидкости, которая еще имеется в эластичном мешке 3.
В дальнейшем варианте осуществления датчики 7 образованы емкостными датчиками, причем в каждом случае один емкостной датчик имеет два сенсорных элемента, которые закреплены на противоположных сторонах в каждом случае на пластинах 2.
Фиг.3 показывает первый вариант осуществления соответствующей изобретению системы 1 регулирования давления согласно фиг.1 на схематичном виде в разрезе. Эластичный мешок 3 состоит из цельной пластиковой пленки, которая сложена и сварена по краям 15 пластиковой пленки.
Фиг.4 показывает дальнейший вариант осуществления соответствующей изобретению системы 16 регулирования давления на схематичном виде спереди. Система 16 регулирования давления отличается от показанной на фиг.1-3 системы 1 регулирования давления тем, что она имеет растягивающие элементы в виде пружин 18. При помощи пружин 18 эластичный мешок 3 растягивается поперек к движению установленных подвижно пластин 2 при перемещении пластин 2 друг к другу, вследствие чего предотвращается оседание, соответственно, складывание эластичного мешка 3, и он сохраняет по существу свою форму.
Далее у системы 16 регулирования давления образующая отверстие для газа первая труба 17 доходит с нижней стороны эластичного мешка 3 до газовой фазы 9. Вследствие этого получено то преимущество, что все разъемы рассоложены на одной стороне эластичного мешка 3.
Фиг.5 показывает другой вариант осуществления соответствующей изобретению системы 19 регулирования давления на схематичном виде спереди. Система 19 регулирования давления отличается от показанной на фиг.1 системы 1 регулирования давления тем, что система 19 регулирования давления имеет боковые стенки 20. Боковые стенки 20 зафиксированы в каждом случае на дополнительных элементах, в частности на раме, и образованы другими пластинами, причем приводная пластина 2 может перемещаться относительно указанных других пластин. Вследствие этого получено то преимущество, что предотвращается боковое отклонение эластичного мешка 3 или выпучивание эластичного мешка 3 даже при высоком давлении, вследствие чего давление жидкости может очень хорошо регулироваться даже при высоком давлении, и может исключать инерционность системы 19 из-за расширения эластичного мешка 3.
Фиг.6 показывает соответствующую изобретению систему 1 регулирования давления согласно фиг.1 при использовании в офтальмологическом хирургическом устройстве 22 на схематичном изображении. Офтальмологическое хирургическое устройство 22 включает в себя в дополнение к системе 1 регулирования давления хирургическую ручку 23 и регулировочное устройство 24, причем хирургическая ручка 23 при помощи шланга 25 присоединена непосредственно ко второй трубе 10 и имеет неизображенный регулировочный клапан. Регулировочный клапан может быть образован, например, магнитным клапаном. Регулировочный блок 24 образован ножной педалью, которая соединена для сообщения с блоком 5 управления. При помощи регулировочного блока 24 может изменяться давление в эластичном мешке 3 и получающееся из него давление промывания, с которым жидкость в эластичном мешке 3 выдается через хирургическую ручку 23 в глаз 26.
Предпочтительно во время всего хирургического вмешательства на глазу 26, в частности также при изменении расстояния 21 между пластинами 2, давление в эластичном мешке 3 удерживается на постоянном уровне блоком 6 нагнетания и удаления воздуха.
В одном другом варианте осуществления регулирование давления в эластичном мешке 3 осуществляется только во время остановки пластин 2. Во время изменения расстояния 21 между пластинами 2 и регулирование давления, и извлечение жидкости из эластичного мешка 3 прерывается. Предпочтительно в этом варианте осуществления изменение расстояния 21 между пластинами 2 выполняется для минимизации объема газа, если использующий офтальмологическое хирургическое устройство 22 хирург делает остановку и кратковременно прерывает вследствие этого хирургическое вмешательство.
В одном другом варианте осуществления блок 6 нагнетания и удаления воздуха образован контролируемым блоком 5 управления клапаном.
Реферат
Изобретение относится к медицинской технике. Система (1) регулирования давления для выдачи жидкости с заданным давлением жидкости из отверстия (10) для жидкости включает эластичный мешок (3) с жидкостной (8) и газовой фазой (9). Отверстие (10) для жидкости выполнено в рабочем положении эластичного мешка (3) в нижней области эластичного мешка (3). Нажимные элементы (2) прилегают к противоположным стенкам эластичного мешка (3). Приводной блок (4) выполнен для приведения в действие, по меньшей мере, одного нажимного элемента. Нажимные элементы выполнены с возможностью перемещения друг к другу посредством приведения в действие упомянутого по меньшей мере одного нажимного элемента. Блок (5) управления соединен с приводным блоком (4). Эластичный мешок (3) имеет отверстие для газа, которое доходит до газовой фазы (9). Система (1) регулирования давления имеет блок (6) нагнетания и удаления воздуха, который соединен с блоком (5) управления и примыкает к отверстию для газа эластичного мешка (3). Блок (6) нагнетания и удаления воздуха выполнен так, чтобы посредством подвода газа в эластичный мешок (3) и/или отвода газа из эластичного мешка (3) регулировать давление жидкости, выданной через отверстие (10) для жидкости. Технический результат состоит в улучшении регулирования давления жидкости, с которым жидкость выдается из эластичного мешка. 10 з.п. ф-лы, 6 ил.
Комментарии