Устройство управления отображением для транспортного средства и способ управления отображением для транспортного средства - RU2643896C2
Код документа: RU2643896C2
Чертежи
















Описание
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству управления отображением для транспортного средства и к способу управления отображением для транспортного средства, которые выполняют управление отображением информации рабочего режима управления помощью при вождении транспортного средства для устройства отображения, предоставленного на приборной панели автомобильного измерительного устройства.
Уровень техники
[0002] Список библиографических ссылок
К настоящему времени, в качестве технологии для отображения информации управления торможением/приведением в движение транспортного средства для устройства отображения, предоставленного на приборной панели автомобильного измерительного устройства, предусмотрена технология, раскрытая в патентном документе 1. Устройство отображения режима управления колесами патентного документа 1 включает в себя средство управления тормозной/движущей силой для обнаружения состояния транспортного средства и регулирования тормозной силы или движущей силы для множества колес, которые присоединены к транспортному средству, на основе результата такого обнаружения. Затем устройство отображения режима управления колесами отображает колеса, в которых тормозная сила или движущая сила регулируется посредством средства управления тормозной/движущей силой, посредством индикатора, размещенного на приборной панели.
Патентные документы
[0003] PTL 1. JP 2000-344085 A
Сущность изобретения
Техническая задача
[0004] Тем не менее, в вышеописанной традиционной технологии, информация отображается посредством управления подсвечиванием четырех ламп индикатора, причем четыре лампы отдельно соответствуют позициям колес на фрагменте контура транспортного средства, моделирующем форму транспортного средства, и индикатор состоит из фрагмента контура транспортного средства и четырех ламп. Другими словами, посредством подсвечивания или мигания лампы в соответствующей позиции, водитель уведомляется в отношении колеса, в котором регулируется тормозная сила или движущая сила. Следовательно, чтобы распознавать колесо, в котором тормозная сила или движущая сила регулируется, водителю необходимо визуально распознавать то, в какой позиции шины подсвечивается лампа. Следовательно, например, в такой ситуации, как движение на извилистой дороге, при котором нагрузка при вождении является высокой, понятно, что может ухудшаться распознаваемость отображаемой информации. Кроме того, в ситуации, в которой нагрузка при вождении является высокой, понятно, что может оказаться, что непосредственное отображение такой подробной информации в качестве подсвечивания лампы в соответствующей точке раздражает водителя.
Настоящее изобретение нацелено на такой аспект, как описано выше. Цель настоящего изобретения заключается в том, чтобы выполнять отображение информации, в котором распознаваемость информации относительно управления помощью при вождении является относительно хорошей даже в ситуации, в которой нагрузка при вождении является относительно большой, причем отображение информации не раздражает водителя.
Решение задачи
[0005] Чтобы разрешать вышеописанные проблемы, вариант осуществления настоящего изобретения отображает изображение для отображения режима помощи, которое представляет собой изображение, имеющее конфигурацию, в которой изображение транспортного средства накладывается на фоновое изображение в качестве плоского изображения с предварительно определенной формой, на устройстве отображения, предоставленном на приборной панели автомобильного измерительного устройства. Помимо этого, когда определяется то, что активируется управление помощью при вождении, реализованное посредством автомобильного устройства помощи при вождении, выполняется управление отображением для того, чтобы изменять режим отображения фрагмента фонового изображения для изображения для отображения режима помощи, которое должно отображаться на устройстве отображения, на предварительно установленный режим отображения.
Преимущества изобретения
[0006] В соответствии с настоящим изобретением, режим отображения фрагмента фонового изображения изменяется, в силу чего водитель уведомляется в отношении того, что устройство помощи при вождении работает. Другими словами, изменяется режим отображения не мелких частичных фрагментов, соответствующих управлению фрагментом изображения транспортного средства, а изображения фрагмента фона. Следовательно, у водителя появляется возможность выяснять изменение контента отображения посредством мгновенного перемещения линии взгляда и посредством периферийного поля зрения без долгого рассматривания контента отображения. Таким образом, даже в ситуации, в которой нагрузка при вождении является высокой, появляется возможность точно уведомлять водителя в отношении того, что управление помощью при вождении работает, без раздражения водителя.
Краткое описание чертежей
[0007] Фиг. 1 является концептуальной схемой, показывающей модель автомобиля V, к которому применяется устройство управления отображением для транспортного средства согласно первому варианту осуществления;
Фиг. 2 является примером блок-схемы, показывающей конфигурацию измерительного устройства 20;
Фиг. 3 является видом, показывающим пример внешней конфигурации измерительного устройства 20;
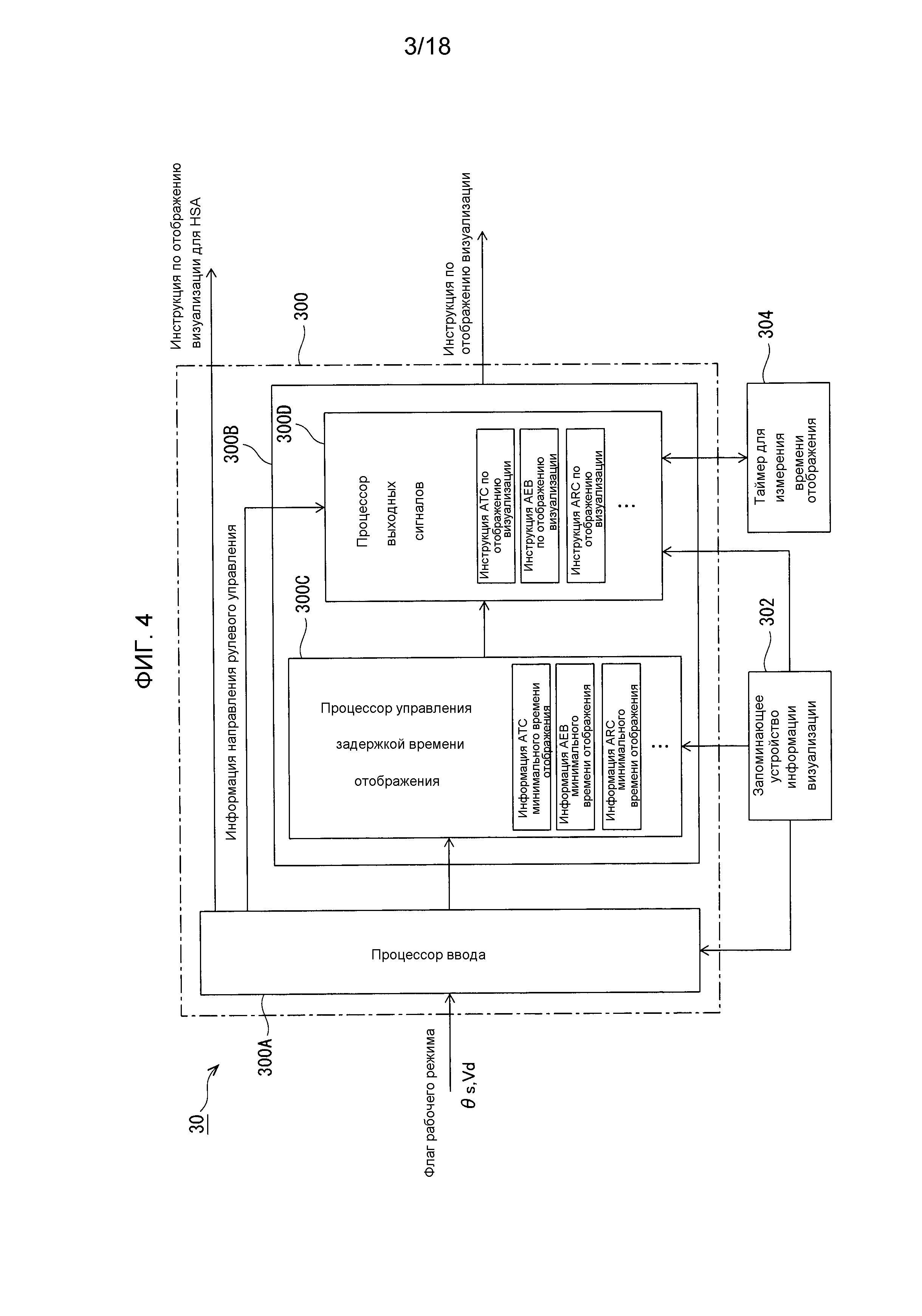
Фиг. 4 является блок-схемой, показывающей пример конкретной конфигурации контроллера 30 отображения;
Фиг. 5 является видом, показывающим пример экрана отображения устройства 26 отображения и пример изображения по умолчанию;
Фиг. 6 является видом, показывающими пример изображения для отображения, когда управление вмешивается;
Фиг. 7А-7В являются видами, показывающим примеры изображений визуализации с анимацией;
Фиг. 8 является видом, показывающим пример изображения 261ARC визуализации в качестве изображения для отображения режима помощи для ARC;
Фиг. 9A-9Е являются видами, показывающими примеры изображений визуализации SMB в качестве изображений для отображения режима помощи для SMB;
Фиг. 10A и 10B являются видами, показывающими примеры изображений 261HSA визуализации в качестве изображений для отображения режима помощи для HSA;
Фиг. 11 является видом, показывающим пример изображения 261HDC визуализации в качестве изображения для отображения режима помощи для HDC;
Фиг. 12 является временной диаграммой для пояснения примера работы во время управления отображением, которое основано на информации минимального времени отображения первого варианта осуществления;
Фиг. 13 является временной диаграммой для пояснения примера операции управления отображением, когда активируется управление ATC или AEB помощью при вождении;
Фиг. 14 является видом, показывающим пример окружения движения, в котором активируется управление ATC или AEB помощью при вождении;
Фиг. 15 является временной диаграммой для пояснения примера операции управления отображением, когда активируется управление SMB помощью при вождении;
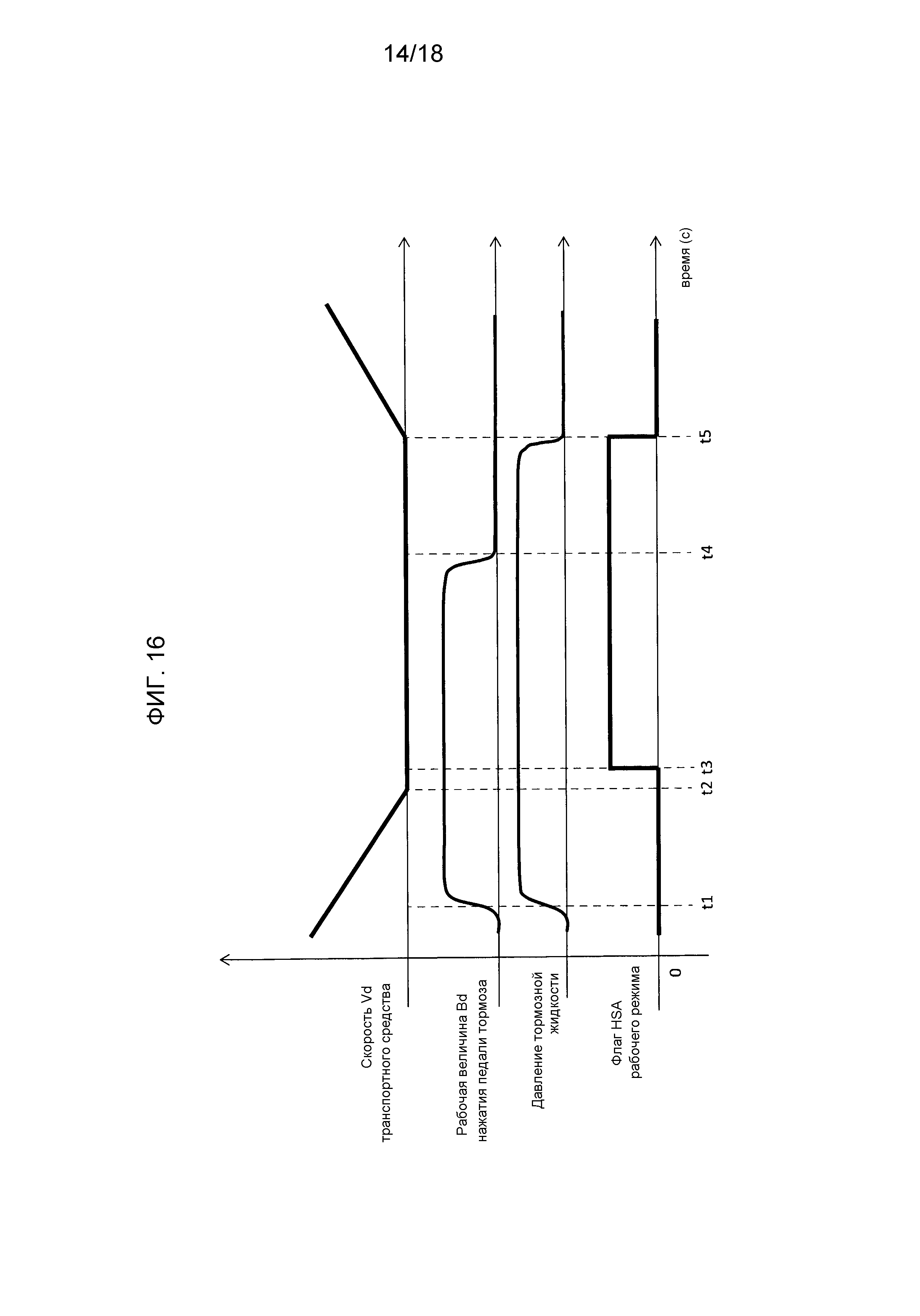
Фиг. 16 является диаграммой, показывающей пример изменений во времени скорости Vd транспортного средства, рабочей величины Bd нажатия педали тормоза, давления тормозной жидкости и флага HSA рабочего режима в рабочем окружении управления HSA помощью при вождении;
Фиг. 17 является видом, показывающим пример хода изменения отображаемого контента экрана 260 отображения и состояния подсвечивания индикаторной лампы 240HSA для HSA относительно хода изменения состояния движения автомобиля V и состояния операции с педалью водителя в рабочем окружении управления HSA помощью при вождении;
Фиг. 18 является блок-схемой, показывающей конфигурацию контроллера 30 отображения второго варианта осуществления;
Фиг. 19 является временной диаграммой для пояснения примера операции управления отображением в случае, если виды управления помощью при вождении активируются при непрерывном наложении друг на друга; и
Фиг. 20 является временной диаграммой для пояснения примера операции управления отображением в случае, если управление помощью при вождении согласно операции и управление помощью при вождении согласно возмущениям активируются одновременно.
Подробное описание вариантов осуществления
[0008] Первый вариант осуществления
Ниже приводится описание первого варианта осуществления настоящего изобретения на основе чертежей. Фиг. 1-17 являются видами, показывающими вариант осуществления устройства управления отображением для транспортного средства и способа управления отображением для транспортного средства согласно первому варианту осуществления настоящего изобретения.
Конфигурация
Фиг. 1 является концептуальной схемой, показывающей модель автомобиля V, к которому применяется устройство управления отображением для транспортного средства согласно этому варианту осуществления.
Автомобиль V этого варианта осуществления монтирует систему SBW (рулевого управления по проводам). Как показано на фиг. 1, этот автомобиль V включает в себя: рулевое колесо 1, поворачиваемый водителем; правое и левое передние колеса 11R и 11L (ведущие колеса); и рулевой вал 2.
Рулевое колесо 1 предоставляется таким образом, что он может механически отделяться от правого и левого передних колес 11R и 11L. Рулевое колесо 1 соединяется с рулевым валом 2.
Автомобиль V дополнительно включает в себя: датчик 3 угла рулевого управления; электромотор 4 формирования силы реакции; и датчик 5 крутящего момента рулевого управления. Датчик 3 угла рулевого управления, электромотор 4 формирования силы реакции и датчик 5 крутящего момента рулевого управления предоставляются на рулевом валу 2.
Датчик 3 угла рулевого управления представляет собой датчик, который обнаруживает угол θs рулевого управления рулевого колеса 1, и состоит из датчика позиции и т.п.
[0009] Электромотор 4 формирования силы реакции представляет собой электромотор, который прикладывает силу реакции при рулевом управлении к рулевому колесу 1 посредством добавления крутящего момента на рулевой вал 2. Здесь, вышеописанная сила реакции при рулевом управлении представляет собой силу реакции, которая действует в противоположном направлении относительно рабочего направления, в котором водитель поворачивает рулевое колесо 1. Этот электромотор 4 формирования силы реакции состоит из бесщеточного электромотора и т.п. и приводится в действие в ответ на ток приведения в действие электромотора формирования силы реакции, выведенный посредством SBW-контроллера 80, который описывается ниже.
Датчик 5 крутящего момента рулевого управления обнаруживает крутящий момент T рулевого управления, передаваемый из рулевого колеса 1 на рулевой вал 2. Этот датчик 5 крутящего момента рулевого управления выполнен с возможностью обнаруживать крутящий момент T рулевого управления посредством обнаружения смещения угла кручения торсионного вала посредством использования потенциометра.
Автомобиль V дополнительно включает в себя: муфту 6; вал 7 шестерни; электромотор 8 рулевого управления; датчик 9 угла поворота электромотора рулевого управления; ведущую шестерню 12; вал 13 зубчатой рейки; поперечные рулевые тяги 14; рулевые рычаги 15 поворотных кулаков; и SBW-контроллер 80.
[0010] Муфта 6 размещается между рулевым колесом 1 и ведущими колесами 11R и 11L и переключается на состояние расцепления или состояние зацепления в соответствии с инструкцией управления муфтой (управляющим током муфты) из SBW-контроллера 80.
В обычном состоянии, эта муфта 6 находится в состоянии расцепления и переходит в состояние зацепления, когда некоторая анормальность (например, анормальность в системе силы реакции при рулевом управлении) возникает в SBW-системе. В состоянии, в котором возникает соответствующая анормальность, и муфта 6 зацепляется, выполняется управление помощью при рулевом управлении, чтобы прикладывать к системе рулевого управления силу помощи при рулевом управлении для уменьшения нагрузки по рулевому управлению на водителя (в дальнейшем в этом документе, это управление помощью при рулевом управлении упоминается в качестве EPS-управления).
[0011] Кроме того, эта муфта 6 переходит в состояние зацепления также в состоянии полного упора, в котором водитель поворачивает рулевое колесо 1 почти до предела рулевого управления. В состоянии, в котором муфта 6 зацепляется в результате перехода в состояние полного упора, выполняется управление во время полного упора для того, чтобы вызывать у водителя ощущения полного упора.
В состоянии расцепления муфты 6, тракт передачи крутящего момента между рулевым колесом 1 и ведущими колесами 11R и 11L механически разъединен, и, соответственно, вызывается состояние, в котором операция рулевого управления рулевым колесом 1 не передается на ведущие колеса 11R и 11L. Между тем, в состоянии зацепления муфты 6, тракт передачи крутящего момента между рулевым колесом 1 и ведущими колесами 11R и 11L механически соединен, и, соответственно, вызывается состояние, в котором операция рулевого управления рулевым колесом 1 передается на ведущие колеса 11R и 11L.
[0012] Относительно вала 7 шестерни, один его конец соединяется с муфтой 6, а ведущая шестерня 12 предоставляется на другом его конце. Ведущая шестерня 12 вводится в зацепление с шестерней зубчатой рейки, предоставленной между обоими концевыми фрагментами вала 13 зубчатой рейки.
Оба конца вала 13 зубчатой рейки соединяются с ведущими колесами 11R и 11L отдельно через поперечные рулевые тяги 14 и рулевые рычаги 15 поворотных кулаков. Другими словами, вал 13 зубчатой рейки смещен в направлении ширины транспортного средства в ответ на вращение ведущей шестерни 12, в силу чего ведущие колеса 11R и 11L управляются через поперечные рулевые тяги 14 и рулевые рычаги 15 поворотных кулаков и допускают изменение направления движения автомобиля V.
[0013] Кроме того, электромотор 8 рулевого управления состоит из бесщеточного электромотора и т.п., аналогично электромотору 4 формирования силы реакции, и приводится в действие в ответ на ток приведения в действие электромотора рулевого управления, выведенный посредством SBW-контроллера 80. Этот электромотор 8 рулевого управления приводится в действие в ответ на ток приведения в действие электромотора рулевого управления и в силу этого выводит крутящий момент поворота при рулевом управлении для рулевого управления ведущими колесами 11R и 11L.
На стороне конца верхушки выходного вала электромотора 8 рулевого управления предоставляется выходная шестерня 8a рулевого механизма, сформированная посредством использования ведущей шестерни 12. Затем выходная шестерня 8a рулевого механизма вводится в зацепление с шестерней зубчатой рейки, предоставленной между обоими концевыми фрагментами вала 13 зубчатой рейки. Другими словами, ведущие колеса 11R и 11L задаются поворачиваемыми в ответ на вращение выходной шестерни 8a рулевого механизма.
[0014] Кроме того, датчик 9 угла поворота электромотора рулевого управления предоставляется на электромоторе 8 рулевого управления. Датчик 9 угла поворота электромотора рулевого управления обнаруживает угол поворота электромотора 8 рулевого управления. Угол θr рулевого управления ведущих колес 11R и 11L уникально определяется посредством угла поворота выходной шестерни 8a рулевого механизма и посредством передаточного отношения шестерни зубчатой рейки вала 13 зубчатой рейки и выходной шестерни 8a рулевого механизма. Следовательно, в этом варианте осуществления, угол θr рулевого управления ведущих колес 11R и 11L из угла поворота электромотора 8 рулевого управления.
SBW-контроллер 80 принимает угол θs рулевого управления рулевого колеса 1, который обнаруживается посредством датчика 3 угла рулевого управления, крутящий момент T рулевого управления, обнаруженный посредством датчика 5 крутящего момента рулевого управления, и угол θr рулевого управления, обнаруженный посредством датчика 9 угла поворота электромотора рулевого управления. Кроме того, помимо вышеуказанного, SBW-контроллер 80 принимает скорость Vd транспортного средства и скорость γ относительно вертикальной оси из контроллера (не показан) другой системы.
[0015] Затем в состоянии расцепления муфты 6 SBW-контроллер 80 управляет приведением в действие электромотора 8 рулевого управления в ответ на состояние рулевого управления рулевого колеса 1 и рулит ведущими колесами 11R и 11L. Таким образом, угол θr рулевого управления ведущих колес 11R и 11L совпадает с углом выдачи инструкции рулевого управления, соответствующим состоянию рулевого управления. Кроме того, одновременно, SBW-контроллер 80 управляет приведением в действие электромотора 4 формирования силы реакции в ответ на состояние рулевого управления ведущих колес 11R и 11L и передает силу реакции при рулевом управлении на рулевое колесо 1. Таким образом, SBW-контроллер 80 прикладывает силу реакции при рулевом управлении, которая моделирует силу реакции поверхности дороги, к рулевому колесу 1. Как описано выше, SBW-контроллер 80 выполняет управление по проводам (в дальнейшем в этом документе называется "SBW-управлением").
[0016] Кроме того, в состоянии, в котором муфта 6 зацепляется в результате перехода в состояние полного упора, SBW-контроллер 80 выполняет управление фиксацией угла рулевого управления, которое заключается в том, чтобы фиксировать угол рулевого управления равным предварительно определенному углу рулевого управления, в качестве управления во время полного упора для того, чтобы вызывать ощущение полного упора у водителя. Например, вышеописанный предварительно определенный угол рулевого управления задается в качестве угла поворота рулевой тяги. Управление во время полного упора завершается во время, когда водитель выполняет операцию рулевого управления назад для рулевого колеса 1. После того, как управление во время полного упора завершается, SBW-контроллер 80 возвращается к обычному SBW-управлению.
Кроме того, автомобиль V включает в себя: измерительное устройство 20; контроллер 30 отображения; устройство 40 помощи при вождении; и сеть 50 связи.
Еще дополнительно, автомобиль V включает в себя: педаль 16 тормоза, нажимаемую водителем; и устройство 17 обнаружения операций нажатия тормоза, которое обнаруживает величину Bd нажатия педали 16 тормоза.
[0017] Устройство 40 помощи при вождении
Устройство 40 помощи при вождении включает в себя множество систем управления (не показаны), которые реализуют множество видов управления помощью при вождении. Устройство 40 помощи при вождении управляет тормозной/движущей силой автомобиля V, управляет передаточным отношением трансмиссии (CVT), управляет SBW-системой и за счет этого реализует множество видов управления помощью при вождении.
Кроме того, устройство 40 помощи при вождении формирует флаги рабочих режимов, которые указывают рабочие режимы соответствующих видов управления помощью при вождении, и передает сформированные флаги рабочих режимов в контроллер 30 отображения через сеть 50 связи. Здесь, флаги рабочих режимов задаются отдельно для множества видов управления помощью при вождении. Затем соответствующие флаги рабочих режимов представляют собой флаги, которые активируются (когда сигналы имеют высокий уровень), при выполнении видов управления помощью при вождении, и деактивируются (когда сигналы имеют низкий уровень) при отсутствии выполнения видов управления помощью при вождении.
[0018] Кроме того, в этом варианте осуществления, устройство 40 помощи при вождении реализует виды управления помощью при вождении из следующих видов (1)-(6). Следует отметить, что виды управления помощью при вождении не ограничены шестью типами из следующих видов (1)-(6), и устройство 40 помощи при вождении может быть выполнено с возможностью реализовывать другие виды управления помощью при вождении, такие как управление поддержанием расстояния между транспортными средствами.
(1) ATC (система активного управления траекторией движения)
(2) AEB (система активного торможения двигателем)
(3) ARC (система активного управления комфортом при езде)
(4) HSA (система помощи при начале движения на подъеме)
(5) HDC (система управления устойчивостью на спуске)
(6) SMB (система "магического бампера" или система отслеживания бокового увода с полосы движения)
[0019] ATC представляет собой управление помощью при вождении, которое управляет выводами тормоза и двигателя на соответствующие колеса таким образом, чтобы уменьшать задержку скорости относительно вертикальной оси автомобиля V при рулевом управлении в ответ на состояние поворота автомобиля V, которое обнаруживается на основе состояния рулевого управления водителем и на основе множества значений обнаружения датчика.
AEB представляет собой управление помощью при вождении, которое уменьшает нагрузку при вождении (при операции перестановки ноги с одной педали на другую водителя) во время движения по извилистой дороге, к примеру, на повороте, посредством управления передаточным отношением трансмиссии, чтобы добавлять замедление в ответ на состояние приведения в движение автомобиля V, которое основано на состоянии рулевого управления водителя и на основе множества значений обнаружения датчика.
ARC представляет собой управление помощью при вождении, которое улучшает сходимость перемещений кузова транспортного средства после того, как автомобиль V преодолевает неровности, каждая из которых служит в качестве относительно большого входного воздействия в него.
[0020] HSA представляет собой управление помощью при вождении, которое поддерживает давление тормоза в течение нескольких секунд (например, двух секунд) в случае, если автомобиль V начинает движение на уклоне, и в силу этого не допускает скатывания автомобиля V назад в случае, если водитель переставляет ногу с педали тормоза на педаль акселератора.
HDC представляет собой управление помощью при вождении, которое выполняет управление торможением/приведением в движение таким образом, чтобы предоставлять возможность автомобилю V спускаться под уклон вниз, когда автомобиль V не может быть замедлен только посредством моторного тормоза, и под уклон вниз для такой скользкой поверхности дороги, как снежная дорога, на постоянной скорости транспортного средства (задаваемой равной 4-15 [км/ч]).
[0021] SMB представляет собой управление помощью при вождении, которое повышает устойчивость при движении автомобиля V относительно угла рулевого управления. Чтобы предоставлять возможность автомобилю V точно отслеживать траекторию линии движения с меньшей коррекцией угла рулевого управления, SMB распознает полосу движения дороги впереди посредством автомобильной камеры (не показана), размещенной над зеркалом заднего вида автомобиля V. Затем, когда обнаруживается отклонение между направлением движения автомобиля V и полосой движения, в таком случае управляется SBW-система, в силу чего угол поворота шин корректируется с тем, чтобы уменьшать соответствующее отклонение, и сила реакции прикладывается к рулевому механизму. Например, даже если направление движения транспортного средства изменяется посредством бокового ветра, выбоины и т.п., SMB может уменьшать такое изменение, и, соответственно, допускает подавление корректирующего рулевого управления водителя.
[0022] Устройство 40 помощи при вождении формирует флаги рабочих режимов, которые соответствуют соответствующим видам управления помощью при вождении из вышеописанных видов (1)-(6), и передает соответствующие сформированные флаги рабочих режимов в контроллер 30 отображения через сеть 50 связи.
В частности, как показано на фиг. 1, устройство 40 помощи при вождении формирует флаг SMB рабочего режима, который указывает рабочий режим SMB, флаг ATC рабочего режима, который указывает рабочий режим ATC, флаг AEB рабочего режима, который указывает рабочий режим AEB, флаг HSA рабочего режима, который указывает рабочий режим HSA, флаг HDC рабочего режима, который указывает рабочий режим HDC, и флаг ARC рабочего режима, который указывает рабочий режим ARC. Затем устройство 40 помощи при вождении передает сформированные флаги SMB, ATC, AEB, HSA, HDC и ARC рабочих режимов в контроллер 30 отображения через сеть 50 связи.
[0023] В этом варианте осуществления, сеть 50 связи представляет собой сеть, которая приспосабливает протокол связи по CAN (контроллерной сети). В протоколе CAN-связи, множество контроллеров соединяется с конфигурацией линейного соединения, и передача данных выполняется посредством доступа к шине многоабонентской системы. Следует отметить, что сеть 50 связи не ограничена протоколом CAN-связи и, например, может иметь конфигурацию, которая приспосабливает другой протокол связи, такой как LIN (локальная соединительная сеть) и FlexRay. Следует отметить, что в этом варианте осуществления, протокол FlexRay-связи приспосабливается в SBW-системе.
[0024] Устройство 17 обнаружения операций нажатия тормоза подает рабочую величину нажатия педали тормоза, которая обнаруживается таким способом, в VDC-систему (не показана) в качестве одной из систем управления, предоставленных в устройстве 40 помощи при вождении.
Здесь, VDC-система представляет собой систему, которая реализует управление торможением/приведением в движение (управление устойчивостью) для того, чтобы считывать заносы передних/задних колес, управлять тормозной силой на соответствующие колеса и выводом двигателя и повышать устойчивость автомобиля V. В этом варианте осуществления, VDC-система формирует информацию BHS (состояния удерживания тормоза), которая указывает состояние нажатия педали 16 тормоза водителем, на основе рабочей величины нажатия педали тормоза, поданной в нее. Затем VDS-система выполнена с возможностью подавать сформированную BHS-информацию в контроллер 30 отображения через сеть 50 связи. Следует отметить, что VDC-система может быть выполнена с возможностью получать BHS-информацию из другой системы.
[0025] Измерительное устройство 20
Далее приводится описание измерительного устройства на основе фиг. 2 и фиг. 3.
Фиг. 2 является примером блок-схемы, показывающей конфигурацию измерительного устройства 20. Фиг. 3 является видом, показывающим пример внешней конфигурации измерительного устройства 20.
Как показано на фиг. 2, измерительное устройство 20 включает в себя: первый измерительный прибор 22; второй измерительный прибор 24; жидкокристаллическое устройство 26 отображения; контроллер 28 измерительных приборов; и запоминающее устройство 29 визуализации изображений.
Первый измерительный прибор 22 имеет конфигурацию, включающую в себя: тахометр 22a, который измеряет и отображает частоту вращения двигателя автомобиля V; и топливомер 22b, который измеряет и отображает оставшийся объем топлива автомобиля V.
[0026] Тахометр 22a представляет собой механический измерительный прибор, который отображает в аналоговой форме частоту вращения двигателя посредством кругового сектора, в который добавляется шкала и числовые значения, и посредством индикатора на основе информации частоты вращения двигателя из контроллера 28 измерительных приборов.
Топливомер 22b представляет собой механический измерительный прибор, который отображает в аналоговой форме оставшийся объем топлива посредством кругового сектора, в который добавляется шкала и буквенные символы (F, E), и посредством индикатора на основе информации остаточного объема топлива из контроллера 28 измерительных приборов.
Второй измерительный прибор 24 имеет конфигурацию, включающую в себя: спидометр 24a, который измеряет и отображает скорость транспортного средства автомобиля V; индикатор 24b, который выполняет отображение предупреждения, отображение рабочего режима управления помощью при вождении и т.п.; и измеритель 24c температуры охлаждающей жидкости, который измеряет и отображает температуру охлаждающей жидкости двигателя автомобиля V.
Спидометр 24a представляет собой механический измерительный прибор, который отображает в аналоговой форме скорость транспортного средства автомобиля V посредством кругового сектора, в который добавляется шкала и числовые значения, и посредством индикатора на основе информации скорости автомобиля V из контроллера 28 измерительных приборов.
[0027] Индикатор 24b гасит, подсвечивает или мигает индикаторной лампой с шаблоном, который подготовлен заранее в ответ на каждое состояние, в ответ на инструкцию по отображению, которая основана на информации, указывающей состояние закрепления ремня безопасности, информации, указывающей состояние открытия/закрытия двери и т.п., информации, исходящей из контроллера 28 измерительных приборов. Кроме того, индикатор 24b гасит, подсвечивает или мигает индикаторной лампой для HSA в ответ на инструкцию по началу отображения индикаторной лампы для HSA, причем инструкция по началу отображения включается в инструкцию по визуализирующему отображению для HSA, которая исходит из контроллера 28 измерительных приборов и описывается ниже.
[0028] Измеритель 24c температуры охлаждающей жидкости представляет собой механический измерительный прибор, который отображает в аналоговой форме температуру охлаждающей жидкости посредством кругового сектора, в который добавляется шкала и буквенные символы (H, C), и посредством индикатора на основе информации температуры охлаждающей жидкости из контроллера 28 измерительных приборов.
В этом варианте осуществления, жидкокристаллическое устройство 26 отображения состоит из жидкокристаллического устройства отображения на TFT (тонкопленочных транзисторах). На основе сигнала отображения изображений из контроллера 28 измерительных приборов, который принимается через сеть 50 связи и контроллер 28 измерительных приборов, это жидкокристаллическое устройство 26 отображения отображает изображение (в дальнейшем в этом документе называется "изображением для отображения режима помощи") для уведомления водителя в отношении рабочего режима для множества видов управления помощью при вождении, реализованных посредством устройства 40 помощи при вождении.
Следует отметить, что жидкокристаллическое устройство 26 отображения не ограничено жидкокристаллическим устройством отображения TFT и может состоять из другого устройства отображения, такого как плазменное устройство отображения, устройство отображения с автоэлектронной эмиссией и органическое электролюминесцентное устройство отображения, при условии, что другое устройство отображения представляет собой устройство отображения, имеющее распознаваемость, эквивалентную или превышающую распознаваемость жидкокристаллического устройства отображения TFT. Кроме того, ниже описываются подробности изображений для отображения режима помощи для шести типов для видов управления помощью при вождении из вышеописанных (1)-(6).
[0029] Контроллер 28 измерительных приборов принимает информацию, отправленную через сеть 50 связи из автомобильного контроллера (ECU) для множества видов управления. В частности, через сеть 50 связи, контроллер 28 измерительных приборов принимает инструкцию по началу отображения (описана ниже) и инструкцию по окончанию отображения (описана ниже) изображения для отображения режима помощи и индикаторной лампы для HSA, причем инструкции отправляются из контроллера 30 отображения. Кроме того, через сеть 50 связи, контроллер 28 измерительных приборов принимает информацию относительно частоты вращения двигателя, скорости транспортного средства и температуры охлаждающей жидкости, которая отправляется из контроллера двигателя (не показан), и информацию относительно оставшегося объема топлива, которая отправляется из контроллера регулирования подачи топлива (не показан). Кроме того, через сеть 50 связи, контроллер 28 измерительных приборов принимает информацию относительно отображения индикаторной лампы, такую как информация относительно открытого/закрытого состояния двери, которая отправляется из контроллера двери.
[0030] Кроме того, контроллер 28 измерительных приборов считывает информацию относительно изображения для отображения режима помощи из запоминающего устройства 29 изображений визуализации на основе принимаемой инструкции по началу отображения соответствующего изображения для отображения режима помощи. Затем контроллер 28 измерительных приборов формирует сигнал отображения изображений для изображения для отображения режима помощи, считанного таким способом, и передает сформированный сигнал отображения изображений в жидкокристаллическое устройство 26 отображения.
Кроме того, на основе принимаемой инструкции по окончанию отображения для изображения для отображения режима помощи, контроллер 28 измерительных приборов считывает, из запоминающего устройства 29 изображений визуализации, информацию относительно изображения для отображения режима помощи (в дальнейшем в этом документе называется "изображением по умолчанию") для уведомления водителя в отношении того, что управление помощью при вождении не работает. Затем контроллер 28 измерительных приборов формирует сигнал отображения изображений для изображения по умолчанию, считанного таким способом, и передает сформированный сигнал отображения изображений в жидкокристаллическое устройство 26 отображения.
[0031] Кроме того, контроллер 28 измерительных приборов передает принимаемую инструкцию по началу отображения для индикаторной лампы для HSA в индикатор 24b второго измерительного прибора 24. Кроме того, контроллер 28 измерительных приборов передает принимаемую инструкцию по окончанию отображения для индикаторной лампы для HSA в индикатор 24b второго измерительного прибора 24.
Кроме того, контроллер 28 измерительных приборов передает принимаемую информацию относительно частоты вращения двигателя и оставшегося объема топлива в первый измерительный прибор 22 и передает принимаемую информацию относительно скорости транспортного средства и температуры охлаждающей жидкости во второй измерительный прибор 24. Кроме того, контроллер 28 измерительных приборов передает принимаемую информацию относительно отображения индикаторов во второй измерительный прибор 24.
[0032] Следует отметить, что в этом варианте осуществления, первый измерительный прибор 22 и второй измерительный прибор 24 состоят из механических измерительных приборов; тем не менее, первый измерительный прибор 22 и второй измерительный прибор 24 не ограничены этой конфигурацией и могут быть выполнены с возможностью выполнять графическое отображение для части или всех из измерительных приборов, которые составляют соответствующие первый измерительный прибор 22 и второй измерительный прибор 24, на экране отображения жидкокристаллического устройства отображения. В этой конфигурации, жидкокристаллическое устройство отображения, которое отображает соответствующие измерительные приборы, может состоять из одного измерительного прибора или множества измерительных приборов. Кроме того, жидкокристаллическое устройство 26 отображения может быть выполнено с возможностью увеличиваться по размеру, а также служить для отображения информации измерительных приборов.
Запоминающее устройство 29 изображений визуализации представляет собой запоминающее устройство, которое сохраняет изображения визуализации (изображения для отображения режима помощи), которые должны отображаться на жидкокристаллическом устройстве 26 отображения. В этом варианте осуществления, запоминающее устройство 29 изображений визуализации сохраняет изображения визуализации, которые подготовлены заранее таким образом, что они отдельно соответствуют вышеописанным шести типам для видов управления помощью при вождении. Следует отметить, что ниже описываются подробности изображений визуализации.
[0033] Кроме того, в этом варианте осуществления, измерительное устройство 20 устанавливается в позиции автомобильной приборной доски (не показана), которая расположена перед водительским сиденьем. Например, как показано на фиг. 3, измерительное устройство 20имеет внешнюю конфигурацию, в которой на приборной панели 21 с формой при виде спереди, образованной посредством вертикальной инверсии "утопленной" формы" и округления всех угловых фрагментов, прямоугольное продолговатое жидкокристаллическое устройство 26 отображения размещается по его центру, круговой первый измерительный прибор 22 размещается в его левой стороне, и круговой второй измерительный прибор 24 размещается в его левой стороне. Следует отметить, что позиция размещения измерительного устройства 20 регулируется таким образом, что когда водитель с предварительно определенным телосложением обращен вперед в состоянии сидения на водительском сиденье в предварительно установленной позиции сиденья, экран отображения жидкокристаллического устройства 26 отображения может оставаться в периферийном поле зрения на нижней стороне относительно водителя. Другими словами, в этом варианте осуществления, предпочтительно, высота и т.п. сиденья регулируется в ответ на телосложение водителя, в силу чего позиционное регулирование выполняется таким образом, что экран отображения жидкокристаллического устройства 26 отображения может оставаться в периферийном поле зрения на нижней стороне относительно водителя.
[0034] Контроллер 30 отображения
Возвращаясь к фиг. 1, контроллер 30 отображения выполняет управление отображением для жидкокристаллического устройства 26 отображения и индикатора 24b, которые предоставляются в измерительном устройстве 20. В частности, на основе флага рабочего режима и угла θs рулевого управления, которые принимаются через сеть 50 связи из устройства 40 помощи при вождении и датчика 3 угла рулевого управления, контроллер 30 отображения выполняет управление отображением для того, чтобы отображать, на жидкокристаллическом устройстве 26 отображения, изображение для отображения режима помощи для уведомления водителя в отношении рабочего режима устройства 40 помощи при вождении. Кроме того, в этом варианте осуществления, контроллер 30 отображения выполняет управление отображением для индикаторной лампы для HSA в индикаторе 24b в то время, когда работает HSA в качестве одного из видов управления помощью при вождении.
[0035] Ниже приводится описание конкретной конфигурации контроллера 30 отображения на основе фиг. 4.
Фиг. 4 является блок-схемой, показывающей пример конкретной конфигурации контроллера 30 отображения.
Как показано на фиг. 4, контроллер 30 отображения включает в себя: ECU 300 для управления отображением; запоминающее устройство 302 информации визуализации; и таймер 304 для измерения времени отображения.
ECU 300 для управления отображением имеет конфигурацию, включающую в себя процессор 300A ввода и модуль 300B управления отображением. Кроме того, модуль 300B управления отображением имеет конфигурацию, включающую в себя процессор 300C управления задержкой времени отображения и процессор 300D выходных сигналов.
Процессор 300A ввода принимает флаги рабочих режимов для множества видов управления помощью при вождении, которые исходят из устройства 40 помощи при вождении, через сеть 50 связи. Кроме того, процессор 300A ввода принимает угол θs рулевого управления, который исходит из датчика 3 угла рулевого управления, через сеть 50 связи. После этого процессор 300A ввода вводит принятые флаги рабочих режимов в процессор 300C управления задержкой времени отображения.
[0036] Кроме того, процессор 300A ввода реализует обработку для определения направления рулевого управления на основе принимаемого угла θs рулевого управления и предварительно установленного порогового значения угла рулевого управления. В частности, процессор 300A ввода сравнивает абсолютное значение принимаемого угла θs рулевого управления и предварительно установленное пороговое значение угла рулевого управления между собой и определяет то, что рулевое управления вправо выполняется, например, в случае определения того, что абсолютное значение положительного угла θs рулевого управления составляет пороговое значение угла рулевого управления или больше. Между тем, процессор 300A ввода определяет то, что рулевое управления влево выполняется, например, в случае определения того, что абсолютное значение отрицательного угла θs рулевого управления составляет пороговое значение угла рулевого управления или больше. Следует отметить, что в случае определения того, что абсолютное значение угла θs рулевого управления меньше порогового значения угла рулевого управления, процессор 300A ввода определяет то, что автомобиль V находится в состоянии движения по прямой (в состоянии, в котором рулевое колесо 1 расположен в нейтральной позиции). После этого процессор 300A ввода вводит информацию (в дальнейшем в этом документе называется "информацией направления рулевого управления ") относительно направления рулевого управления, которая основана на результате определения, в процессор 300D выходных сигналов.
Здесь, информация направления рулевого управления включает в себя информацию относительно флага рулевого управления влево и флага рулевого управления вправо.
Флаг рулевого управления влево представляет собой флаг, который указывает то, что рулевое управление влево выполняется, во время активированного режима (например, когда уровень сигнала имеет высокий уровень), и флаг, который указывает то, что рулевое управлении влево не выполняется, во время отключенного режима (например, когда уровень сигнала имеет низкий уровень).
[0037] Между тем, флаг рулевого управления вправо представляет собой флаг, который указывает то, что рулевое управление вправо выполняется, во время активированного режима (например, когда уровень сигнала имеет высокий уровень), и флаг, который указывает то, что рулевое управление вправо не выполняется, во время отключенного режима (например, когда уровень сигнала имеет низкий уровень).
Кроме того, флаг рулевого управления влево и флаг рулевого управления вправо указывают то, что рулевое колесо 1 расположено в нейтральной позиции, когда оба из них находятся в отключенном состоянии.
Кроме того, процессор 300A ввода принимает BHS-информацию, которая исходит из устройства 40 помощи при вождении, флаг HSA рабочего режима и скорость Vd транспортного средства, которые исходят из другой системы, через сеть 50 связи. После этого процессор 300A ввода передает инструкцию по отображению визуализации HSA, которая основана на принимаемой BHS-информации, флаге HSA рабочего режима и скорости Vd транспортного средства и включает в себя инструкцию по отображению изображения для отображения режима помощи и инструкцию по отображению индикаторной лампы для HSA, через сеть 50 связи в измерительное устройство 20.
[0038] Процессор 300C управления задержкой времени отображения определяет рабочий режим управления помощью при вождении на основе флага рабочего режима, введенного в него. Затем при определении того, что активируется, по меньшей мере, одно управление помощью при вождении из вышеописанных пяти типов для видов управления помощью при вождении, исключая HSA, процессор 300C управления задержкой времени отображения получает информацию (в дальнейшем в этом документе называется "информацией минимального времени отображения") относительно минимального времени отображения, которое предварительно установлено для управления помощью при вождении, определенного для активации, из запоминающего устройства 302 визуализирующей информации. Следует отметить, что в этом варианте осуществления, можно задавать минимальное время отображения для каждого типа для видов управления помощью при вождении.
[0039] Здесь, минимальное время отображения, в случае отображения изображения для отображения режима помощи на экране отображения жидкокристаллического устройства 26 отображения, представляет собой время непрерывного отображения соответствующего изображения для отображения режима помощи в течение периода в качестве нижнего предела, чтобы улучшать распознаваемость отображаемого контента водителя. В этом варианте осуществления, по существу, изображение для отображения режима помощи отображается непрерывно в ходе работы управления помощью при вождении. Между тем, в случае если управление помощью при вождении завершается до истечения минимального времени отображения, предварительно установленного для соответствующего управления помощью при вождении, изображение для отображения режима помощи отображается непрерывно до истечения соответствующего минимального времени отображения.
[0040] Тем не менее, в этом варианте осуществления, в случае если другое управление помощью при вождении активируется в ходе работы определенного управления помощью при вождении, отображение времени отображения режима помощи для такого последующего активированного управления помощью при вождении выполняется сразу, даже если время отображения времени отображения режима помощи для такого ранее активированного управления помощью при вождении не истекло в течение более чем минимального времени отображения. Другими словами, выполняется следующее по приоритету управление отображением.
[0041] Кроме того, минимальное время отображения является информацией, в которой информация, указывающая тип управления помощью при вождении, и константа (например, подсчитанное значение таймера и т.п.), указывающая минимальное время отображения, соответствующее соответствующему типу, ассоциированы между собой.
Процессор 300C управления задержкой времени отображения вводит такую информацию минимального времени отображения, которая получается из запоминающего устройства 302 визуализирующей информации, и флаг рабочего режима, который подается в него, в процессор 300D выходных сигналов.
На основе введенной информации минимального времени отображения и введенной информации направления рулевого управления, процессор 300D выходных сигналов считывает информацию шаблона отображения изображения для отображения режима помощи, которое соответствует надлежащему управлению помощью при вождении из запоминающего устройства 302 информации визуализации. Затем на основе считываемой информации шаблона отображения и подсчитанного значения таймера 304 для измерения времени отображения, процессор 300D выходных сигналов формирует инструкцию по отображению визуализации и передает сформированную инструкцию по отображению визуализации через сеть 50 связи в измерительное устройство 20.
[0042] Здесь, инструкция по отображению визуализации является информацией с инструкциями, включающей в себя: инструкции по началу отображения, инструкции по переключению отображения и инструкции по окончанию отображения для множества изображений для отображения режима помощи, инструкции по началу отображения и инструкции по окончанию отображения для индикаторной лампы для HSA и т.п.
При определении того, что флаг рабочего режима переходит в активированное состояние, процессор 300D выходных сигналов передает инструкцию по началу отображения для соответствующего изображения для отображения режима помощи управления помощью при вождении в измерительное устройство 20через сеть 50 связи. Кроме того, после передачи инструкции по началу отображения, процессор 300D выходных сигналов дает возможность таймеру 304 для измерения времени отображения начинать операцию подсчета и измеряет время отображения изображения для отображения режима помощи.
[0043] Затем, на основе подсчитанного значения таймера 304 для измерения времени отображения, процессор 300D выходных сигналов определяет время окончания отображения отображаемого изображения для отображения режима помощи.
В частности, при определении того, что флаги рабочих режимов находятся в отключенном состоянии (все флаги рабочих режимов находятся в отключенном состоянии), и время отображения изображения для отображения режима помощи истекает в течение более чем минимального времени отображения, процессор 300D выходных сигналов определяет, что оно представляет собой время окончания отображения.
[0044] Кроме того, при определении того, что флаги рабочих режимов находятся в отключенном состоянии (все флаги рабочих режимов находятся в отключенном состоянии) после того, как время отображения отображаемого изображения для отображения режима помощи истекает в течение более чем минимального времени отображения, процессор 300D выходных сигналов определяет, что оно представляет собой время окончания отображения.
При определении того, что время представляет собой время окончания отображения, процессор 300D выходных сигналов передает инструкцию по окончанию отображения через сеть 50 связи в измерительное устройство 20. Другими словами, процессор 300D выходных сигналов определяет то, что не работает ни один из видов управления помощью при вождении, и дает возможность жидкокристаллическому устройству 26 отображения отображать изображение по умолчанию.
[0045] Между тем, при определении того, что флаг рабочего режима другого управления помощью при вождении переходит в активированное состояние до того, как время отображения отображаемого изображения для отображения режима помощи истекает в течение более чем минимального времени отображения, процессор 300D выходных сигналов передает инструкцию по переключению отображения через сеть 50 связи в измерительное устройство 20.
Здесь, инструкция по переключению отображения представляет собой инструкцию по отображению для того, чтобы переключать отображаемое изображение для отображения режима помощи на изображение для отображения режима помощи из другого управления помощью при вождении, при котором флаг рабочего режима переходит в активированное состояние, и отображать переключенное изображение для отображения режима помощи.
[0046] Кроме того, в этом варианте осуществления, для управления помощью при вождении, в котором рабочее окружение является однозначным, во-первых, такое изображение для отображения режима помощи (в дальнейшем в этом документе называется "изображением для отображения во время вмешательства в управление") которое должно отображаться, когда определяется то, что управление помощью при вождении вмешивается, подготовлено заранее. Кроме того, изображение для отображения режима помощи (в дальнейшем в этом документе называется " изображением визуализации с анимацией"), которое должно отображаться с возможностью переключения от изображения для отображения во время вмешательства в управление, когда определяется то, что окружение переключается на предварительно установленное рабочее окружение, подготовлено заранее. Другими словами, эти изображения предварительно сохраняются в запоминающем устройстве 29 изображений визуализации измерительного устройства 20.
[0047] В частности, в видах ATC и AEB управления помощью при вождении, такие окружения, в которых активируются виды управления помощью при вождении, являются однозначными, к примеру, в случае, в котором автомобиль V выполняет операцию поворота (тем не менее, такая активация не ограничена случаем, в котором автомобиль V выполняет операцию поворота). В этом варианте осуществления, для видов ATC и AEB управления помощью при вождении, изображения для отображения во время вмешательства в управление и изображения визуализации с анимацией с графическими шаблонами, отдельно соответствующими направлениям рулевого управления (рулевому управлению влево, рулевому управлению вправо), указываемым посредством информации направления рулевого управления, предварительно сохраняются в запоминающем устройстве 29 изображений визуализации.
[0048] При определении того, что ATC или AEB находятся в рабочем режиме на основе полученного флага ATC или AEB рабочего режима, процессор 300D выходных сигналов считывает информацию шаблона отображения управления ATC или AEB помощью при вождении, из запоминающего устройства 302 информации визуализации. Затем при определении того, что управление ATC или AEB помощью при вождении находится в состоянии вмешательства (рабочий режим и событие, когда рулевое колесо 1 находится в нейтральной позиции), на основе считываемой информации шаблона отображения и полученной информации направления рулевого управления, процессор 300D выходных сигналов формирует инструкцию по началу отображения для изображения для отображения во время вмешательства в управление. После этого процессор 300D выходных сигналов передает сформированную инструкцию по началу отображения в измерительное устройство 20 через сеть 50 связи.
[0049] Между тем, при определении того, что управление ATC или AEB помощью при вождении работает в предварительно установленном окружении (рабочий режим и событие, когда рулевое колесо 1 выполняет рулевое управление влево или рулевое управление вправо), на основе флага ATC или AEB рабочего режима и информации направления рулевого управления, процессор 300D выходных сигналов формирует инструкцию по переключению отображения на изображение визуализации с анимацией, соответствующее рулевому управлению влево или рулевому управлению вправо. После этого процессор 300D выходных сигналов передает сформированную инструкцию по переключению отображения в измерительное устройство 20 через сеть 50 связи. Следует отметить, что в этом варианте осуществления, изображение визуализации с анимацией отображается только в течение периода в то время, когда выполняется рулевое управление влево или рулевое управление вправо. Другими словами, даже если минимальное время отображения не истекло от отображения изображения визуализации с анимацией, процессор 300D выходных сигналов выполняет управление отображением для того, чтобы выполнять переключение отображения на изображение для отображения во время вмешательства в управление в момент времени, когда рулевое управление влево или рулевое управление вправо завершается. Тем не менее, до тех пор, пока не истечет общее время отображения от начального отображения изображения для отображения во время вмешательства в управление, причем общее время отображения охватывает отображение изображения визуализации с анимацией, в течение более чем минимального времени отображения, процессор 300D выходных сигналов выполняет управление отображением для того, чтобы непрерывно выполнять отображение изображения для отображения во время вмешательства в управление, даже если флаг ATC или AEB рабочего режима переходит в отключенное состояние.
[0050] Запоминающее устройство 302 информации визуализации представляет собой запоминающее устройство, которое сохраняет: информацию минимального времени отображения множества видов управления помощью при вождении; и информацию шаблона отображения изображений для отображения режима помощи, соответствующих множеству видов управления помощью при вождении. В этом варианте осуществления, запоминающее устройство 302 информации визуализации сохраняет виды ATC, AEB, ARC, SMB и HDC управления помощью при вождении и информацию минимального времени отображения. Помимо этого, запоминающее устройство 302 информации визуализации сохраняет информацию шаблона отображения изображений для отображения информации помощи видов ATC, AEB, ARC, SMB, HDC и HSA управления помощью при вождении.
Таймер 304 для измерения времени отображения представляет собой таймер, который сбрасывает подсчитанное значение в ответ на инструкцию сброса из процессора 300D выходных сигналов и начинает подсчет в ответ на инструкцию по началу подсчета из процессора 300D выходных сигналов. Затем таймер 304 для измерения времени отображения вводит подсчитанное значение счетчика в процессор 300D выходных сигналов.
[0051] Изображение для отображения режима помощи
Далее, на основе фиг. 5-11, приводится описание изображений для отображения режима помощи, отдельно соответствующих вышеописанным шести типам для видов управления помощью при вождении.
Конфигурация экрана отображения и изображения по умолчанию
Во-первых, на основе фиг. 5, приводится описание конфигурации экрана отображения жидкокристаллического устройства 26 отображения и изображения по умолчанию, которое должно отображаться во время бездействия управления помощью при вождении. Фиг. 5 является видом, показывающим пример экрана отображения жидкокристаллического устройства 26 отображения и пример изображения по умолчанию.
Как показано на фиг. 5, на экране 260 отображения жидкокристаллического устройства 26 отображения, область отображения в изображении разделена на четыре области, которые представляют собой: первую область 260А отображения, вторую область 260B отображения; третью область 260C отображения; и четвертую область 260D отображения.
[0052] Первая информационная область 260A представляет собой область для отображения такой информации, как время и температура воздуха.
Вторая область 260B отображения представляет собой область для отображения такой информации, как рабочий режим системы помощи для удержания на полосе движения, управление поддержанием расстояния между транспортными средствами и заданное значение скорости транспортного средства управления движением на постоянной скорости транспортного средства.
Третья информационная область 260C представляет собой область для отображения изображения для отображения режима помощи.
Четвертая область 260D отображения представляет собой область для отображения такой информации, как измеренные значения позиции переключения коробки передач, режима движения и одометра и измеренное значение счетчика суточного пробега.
Как показано на фиг. 5, в третьей области 260C отображения отображается изображение 261DF по умолчанию.
Изображение 261DF по умолчанию представляет собой изображение, которое должно отображаться, когда ни один из видов управления помощью при вождении не работает, и как показано на фиг. 5, имеет конфигурацию, включающую в себя изображение 261a сетки и изображение 261b транспортного средства.
[0053] Изображение 261a сетки представляет собой решетчатое плоское изображение.
Изображение 261b транспортного средства представляет собой, например, изображение с точки обзора при просмотре вниз на тип транспортного средства, идентичный автомобилю V, от верхней задней части в продольном направлении транспортного средства.
Изображение 261b транспортного средства отображается наложенным на изображение 261a сетки. Изображение 261a сетки имеет форму, которая идет в продольном направлении транспортного средства (дальнем и ближнем направлении) изображения 261b транспортного средства, при этом ширина (габаритная ширина и ширина решетки) в направлении (в дальнейшем в этом документе называется "поперечным направлением"), перпендикулярном соответствующему продольному направлению, является большей к задней части (ближней стороне), и соответствующая ширина является меньшей к передней части (дальней стороне). Изображение 261b транспортного средства отображается наложенным фактически в центре в продольном направлении и поперечном направлении изображения 261a сетки.
Кроме того, в текущем и последующих изображениях для отображения режима помощи, включающих в себя изображение 261DF по умолчанию, цвет фона является белым цветом для удобства иллюстрации; тем не менее, предпочтительно задается как цвет фона, такой как черный цвет, который может использовать эффект отображения, который описывается ниже, который позволяет изображениям для отображения режима помощи выглядеть так, как будто они излучают свет.
[0054] Изображение для отображения во время вмешательства в управление и изображение визуализации с анимацией
Далее, на основе фиг. 6- фиг. 7А и 7B, приводится описание каждого изображения для отображения режима помощи, которое должно отображаться в то время, когда работает управление ATC или AEB помощью при вождении. Фиг. 6 являются видами, показывающими пример изображения для отображения во время вмешательства в управление. Фиг. 7A и 7B являются видами, показывающими примеры изображения визуализации с анимацией. Фиг. 7A является видом, показывающим пример изображения визуализации с анимацией (в дальнейшем в этом документе называется "изображением визуализации рулевого управления влево"), когда рулевое управление влево определяется, и фиг. 7B является видом, показывающим пример изображения визуализации с анимацией (в дальнейшем в этом документе называется "изображением визуализации рулевого управления вправо"), когда рулевое управление вправо определяется.
[0055] Изображение 261IN для отображения во время вмешательства в управление, показанное на фиг. 6, представляет собой изображение для отображения режима помощи, которое должно отображаться, когда управление ATC или AEB помощью при вождении вмешивается. В изображении 261DF по умолчанию по фиг. 5, изображение 261IN для отображения во время вмешательства в управление становится изображением, в котором изображения колес отображаются наложенными на позиции колес в изображении 261b транспортного средства. В частности, изображение 263FL колеса отображается наложенным на позицию переднего левого колеса, изображение 263FR колеса отображается наложенным на позицию переднего правого колеса, изображение 263BL колеса отображается наложенным на позицию заднего левого колеса, и изображение 263BR колеса отображается наложенным на позицию заднего правого колеса. Следует отметить, что изображения 263FL, 263FR, 263BL и 263BR колес отображаются наложенными на изображение 261b транспортного средства посредством цвета отображения, который вызывает эффект отображения, который позволяет колесам выглядеть так, как будто они излучают свет (в дальнейшем в этом документе, этот режим отображения упоминается в качестве отображения с подсвечиванием четырех колес). Здесь, цвет отображения, вызывающий эффект отображения, который позволяет колесам выглядеть так, как будто они излучают свет, становится, например, цветом отображения, полученным посредством реализации градации, подсветки и т.п. для основания, который является синим, зеленым и т.п., в случае если цвет фона является черным цветом.
[0056] Между тем, изображение 261LC визуализации рулевого управления влево, показанное на фиг. 7A, представляет собой изображение для отображения режима помощи, которое должно отображаться, когда флаг ATC или AEB рабочего режима находится в активированном состоянии, и флаг рулевого управления влево находится в активированном состоянии. Изображение 261LC визуализации рулевого управления влево имеет конфигурацию, включающую в себя: изображение 261c сетки с изгибом влево, которое получается посредством деформации изображения 261a сетки по фиг. 6 в форму, изогнутую влево; изображение 261b транспортного средства; и изображения 263FL, 263FR, 263BL и 263BR колес. В изображении 261LC визуализации рулевого управления влево область 264LL отображения с полукруглым эффектом, в которой фрагмент дуги окружности обращен влево наружу, дополнительно предоставляется на левой стороне транспортного средства на периферии изображения 261b транспортного средства. Кроме того, в изображении 261LC визуализации рулевого управления влево, область 264RL отображения с полукруглым эффектом, в которой фрагмент дуги окружности обращен вправо наружу, дополнительно предоставляется на правой стороне транспортного средства на периферии изображения 261b транспортного средства. Области 264LL и 264RL отображения эффектов имеют размер в таком масштабе, который полностью окружает изображение 261b транспортного средства, когда окружность нарисована посредством соединения обоих из них между собой. В этом варианте осуществления, области 264LL и 264RL отображения эффектов, которые представляют собой области, обведенные посредством пунктирных линий на фиг. 7A, отображаются посредством такого цвета отображения, вызывающего эффект отображения, который позволяет соответствующим областям выглядеть так, как будто они излучают свет. В это время, градуированное отображение выполняется таким образом, что яркость (или светлота) может быть более высокой в областях из областей 264LL и 264RL отображения эффектов, которые ближе к изображению 261b транспортного средства, и что яркость (или светлота) может быть более низкой в областях дальше от изображения 261b транспортного средства. Следует отметить, что изображения 263FL, 263FR, 263BL и 263BR колес в изображении 261LC визуализации рулевого управления влево также подвергнуты отображению с подсвечиванием четырех колес, аналогично изображению 261IN для отображения во время вмешательства в управление по фиг. 6, описанному выше.
[0057] Кроме того, в этом варианте осуществления, как показано на фиг. 7A, области 264LL и 264RL отображения эффектов не предоставляются в области, исключающей две линии на левом крае и правом крае, причем область принадлежит области, эквивалентной шести линиям, которые расположены в центре в поперечном направлении изображения 261LC сетки с изгибом влево и идут в дальнем и ближнем направлении. Таким образом, центральная область, которая не подвергнута отображению эффекта, выполнена с возможностью быть похожей на проезжую дорогу.
Кроме того, изображение 261RC визуализации рулевого управления вправо, показанное на фиг. 7B, представляет собой изображение для отображения режима помощи, которое должно отображаться, когда флаг ATC или AEB рабочего режима находится в активированном состоянии, и флаг рулевого управления вправо находится в активированном состоянии. Изображение 261RC визуализации рулевого управления вправо имеет конфигурацию, включающую в себя: изображение 261d сетки с изгибом вправо, которое получается посредством деформации изображения 261a сетки по фиг. 5 в форму, изогнутую вправо; изображение 261b транспортного средства; и изображения 263FL, 263FR, 263BL и 263BR колес. В изображении 261RC визуализации рулевого управления вправо область 264LR отображения с полукруглым эффектом, в которой фрагмент дуги окружности обращен влево наружу, дополнительно предоставляется на левой стороне транспортного средства на периферии изображения 261b транспортного средства. Кроме того, в изображении 261RC визуализации рулевого управления вправо, область 264RR отображения с полукруглым эффектом, в которой фрагмент дуги окружности обращен вправо наружу, дополнительно предоставляется на правой стороне транспортного средства на периферии изображения 261b транспортного средства.
Следует отметить, что изображение 261RC визуализации рулевого управления вправо представляет собой изображение, которое задается симметричным изображению 261LC визуализации рулевого управления влево и выполняет отображение эффекта, аналогичное отображению эффекта изображения 261LC эффекта рулевого управления влево.
[0058] Изображение для отображения режима помощи для ARC
Далее, на основе фиг. 8, приводится описание изображения для отображения режима помощи, которое должно отображаться в то время, когда работает управление ARC помощью при вождении. Фиг. 8 является видом, показывающим пример изображения 261ARC визуализации, которое представляет собой изображение для отображения режима помощи для ARC.
Изображение 261ARC визуализации, показанное на фиг. 8, представляет собой изображение для отображения режима помощи, которое должно отображаться, когда флаг ARC рабочего режима находится в активированном состоянии. Как показано на фиг. 8, изображение 261ARC визуализации имеет конфигурацию, включающую в себя: изображение 261a сетки; изображение 261b транспортного средства; изображения 263FL, 263FR, 263BL и 263BR колес; и область 265 отображения эффекта.
[0059] Область 265 отображения эффекта представляет собой область, полученную посредством обведения периферии изображения 261 транспортного средства в прямоугольную форму.
В этом варианте осуществления, цвет линий, которые формируют решетку в области, обведенной посредством области 265 отображения эффекта, отображается посредством такого цвета отображения, вызывающего эффект отображения, который позволяет соответствующим линиям выглядеть так, как будто они излучают свет.
Кроме того, изображения 263FL, 263FR, 263BL и 263BR колес в изображении 261ARC визуализации подвергаются отображению с подсвечиванием четырех колес.
Здесь, вышеописанное управление ARC помощью при вождении представляет собой управление для того, чтобы уменьшать снижение комфорта во время езды, вызываемое посредством того факта, что автомобиль V преодолевает неровности на дороге, посредством быстрого демпфирования перемещений относительно поведения в вертикальном направлении, поведения в поперечном направлении и т.п. кузова транспортного средства, вызываемого посредством того факта, что автомобиль V преодолевает неровности. Другими словами, изображение для отображения режима помощи для ARC направлено на эффект отображения для вызывания у водителя ощущения безопасности, которое вызывается, как будто поверхность дороги в области 265 отображения эффекта на периферии изображения 261b транспортного средства является ровной землей, посредством предоставления возможности излучения света для линий в области.
[0060] Изображение для отображения режима помощи для SMB
Далее, на основе фиг. 9A-9E, приводится описание изображений для отображения режима помощи, которое должно отображаться в то время, когда работает управление SMB помощью при вождении. Фиг. 9A-9E являются видами, показывающими примеры изображений SMB визуализации, которые представляют собой изображения для отображения режима помощи для SMB.
Изображения 261SMB1-262SMB5 визуализации, показанные на фиг. 9A-9E, представляют собой изображения для отображения режима помощи, которые должны отображаться, когда флаг SMB рабочего режима находится в активированном состоянии.
Как показано на фиг. 9A, изображение 261SMB1 визуализации имеет конфигурацию, включающую в себя: изображение 261h сетки HP-формы; и изображение 261b транспортного средства.
Изображение 261h сетки HP-формы представляет собой изображение формы полутрубы, в котором оба поперечных края изображения 261a сетки, показанного на фиг. 5, округляются и изгибаются таким образом, что они подняты вверх. Посредством приспособления такой формы, стенки образуются на обеих из поперечных сторон изображения 261b транспортного средства.
[0061] Как показано на фиг. 9B, изображение 261SMB2 визуализации имеет конфигурацию, в которой, в изображении 261a сетки изображения 261SMB1 визуализации, предоставляются область AL1 отображения эффекта с левой стороны, которая расположена близко к левой стороне изображения 261b транспортного средства, и область AR1 отображения эффекта с правой стороны, которая расположена близко к правой стороне изображения транспортного средства, причем области AL1 и AR1 отображения эффектов с левой стороны и с правой стороны указываются посредством фрагментов в виде пунктирной линии. В этом варианте осуществления, изображение 261SMB2 визуализации отображается посредством цвета отображения, вызывающего эффект отображения, который позволяет внутренним сторонам области AL1 отображения эффекта с левой стороны и области AR1 отображения эффекта с правой стороны выглядеть так, как будто они излучают свет (в дальнейшем в этом документе, это отображение упоминается в качестве отображения с излучением света).
[0062] Как показано на фиг. 9C, изображение 261SMB3 визуализации имеет конфигурацию, в которой, в дополнение к изображению 261SMB2 визуализации, предоставляется область AL2 отображения эффекта с левой стороны, смежная с левой стороной области AL1 отображения эффекта с левой стороны изображения 261a сетки. Помимо этого, изображение 261SMB3 визуализации имеет конфигурацию, в которой предоставляется область AR2 отображения эффекта с правой стороны, смежная с правой стороной ARI области отображения эффекта с правой стороны изображения 261a сетки. В этом варианте осуществления, изображение 261SMB3 визуализации выполняет отображение с излучением света для областей AL1 и AL2 отображения эффекта с левой стороны и областей AR1 и AR2 отображения эффекта с правой стороны.
[0063] Как показано на фиг. 9D, изображение 261SMB4 визуализации имеет конфигурацию, в которой, в дополнение к изображению 261SMB3 визуализации, предоставляется область AL3 отображения эффекта с левой стороны, смежная с левой стороной области AL2 отображения эффекта с левой стороны изображения 261a сетки. Помимо этого, изображение 261SMB4 визуализации имеет конфигурацию, в которой предоставляется область AR3 отображения эффекта с правой стороны, смежная с правой стороной области AR2 отображения эффекта с правой стороны изображения 261a сетки. В этом варианте осуществления, изображение 261SMB4 визуализации выполняет отображение с излучением света для областей AL1-AL3 отображения эффекта с левой стороны и областей AR1-AR3 отображения эффекта с правой стороны.
[0064] Как показано на фиг. 9E, изображение 261SMB5 визуализации имеет конфигурацию, в которой, в дополнение к изображению 261SMB4 визуализации, предоставляется область AL4 отображения эффекта с левой стороны, смежная с левой стороной области AL3 отображения эффекта с левой стороны изображения 261a сетки. Помимо этого, изображение 261SMB5 визуализации имеет конфигурацию, в которой предоставляется область AR4 отображения эффекта с правой стороны, смежная с правой стороной области AR3 отображения эффекта с правой стороны изображения 261a сетки. В этом варианте осуществления, изображение 261SMB5 визуализации выполняет отображение с излучением света для областей AL1-AL4 отображения эффекта с левой стороны и областей AR1-AR4 отображения эффекта с правой стороны.
В этом варианте осуществления, для вышеописанных изображений 261SMB1-261SMB5 визуализации, отображение с излучением света выполняется таким образом, что яркость (или светлота) может быть более высокой в областях ближе к изображению 261b транспортного средства в дальнем и ближнем направлении, и что яркость (или светлота) может быть более низкой в областях дальше от изображения 261b транспортного средства.
[0065] Кроме того, в этом варианте осуществления, вышеописанные изображения 261SMB1-261SMB5 визуализации отображаются непрерывно, в силу чего выполняется отображение анимации.
В частности, водитель включает SMB-переключатель (не показан) для активации управления помощью при вождении, в силу чего флаг SMB рабочего режима переходит в активированное состояние. Таким образом, контроллер 30 отображения выполняет управление отображением для того, чтобы переключать изображение для отображения третьей области 260C отображения жидкокристаллического устройства 26 отображения на изображение 261SMB1 визуализации. Затем, контроллер 30 отображения выполняет такое управление отображением для того, чтобы отображать изображение 261SMB1 визуализации, изображение 261SMB2 визуализации, изображение 261SMB3 визуализации, изображение 261SMB4 визуализации и изображение 261SMB5 визуализации в этом порядке. Таким образом, выполняется отображение анимации, в котором изображения 261SMB1-261SMB5 визуализации последовательно излучают свет со стороны около изображения 261b транспортного средства, и вызывается состояние, в котором обе из поперечных сторон изображения 261b транспортного средства окружены посредством таких стенок, которые излучают свет. После этого, водитель выключает SMB-переключатель, в силу чего флаг SMB рабочего режима переходит в отключенное состояние. Таким образом, контроллер 30 отображения выполняет такое управление отображением для того, чтобы отображать изображение 261SMB5 визуализации, изображение 261SMB4 визуализации, изображение 261SMB3 визуализации, изображение 261SMB2 визуализации и изображение 261SMB1 визуализации в этом порядке относительно третьей области 260C отображения жидкокристаллического устройства 26 отображения. Таким образом, выполняется отображение анимации, в котором свет гасится от поперечных наружных сторон изображения 261a сетки к внутренней стороне. После этого, контроллер 30 отображения выполняет управление отображением для того, чтобы отображать изображение 261DF по умолчанию в третьей области 260C отображения жидкокристаллического устройства 26 отображения.
[0066] Изображение для отображения режима помощи для HSA
Далее, на основе фиг. 10A и 10B, приводится описание изображения для отображения режима помощи, которое должно отображаться в то время, когда работает управление HSA помощью при вождении. Фиг. 10A и 10B являются видами, показывающими примеры изображений 261HSA визуализации, которые представляют собой изображения для отображения режима помощи для HSA.
Изображение 261HSA(S) визуализации, показанное на фиг. 10A, представляет собой изображение для отображения режима помощи, которое должно отображаться в то время, когда флаг HSA рабочего режима находится в активированном состоянии, и педаль 16 тормоза находится в нажатом состоянии (в дальнейшем в этом документе называется "состоянием BH (удерживания тормоза)").
[0067] Между тем, изображение 261HSA(O) визуализации, показанное на фиг. 10B, представляет собой изображение для отображения режима помощи, которое должно отображаться в то время, когда в BH-состоянии водитель отпускает педаль тормоза 16, и вызывается состояние, в котором активируется операция поддержания давления тормозной жидкости в HSA (в дальнейшем в этом документе, это состояние упоминается в качестве состояния выполнения операции поддержания давления жидкости).
В дальнейшем в этом документе, в случае если изображение 261HSA(S) визуализации и изображение 261HSA(O) визуализации не отличены друг от друга, они оба называются просто " изображениями 261HSA визуализации ".
Как показано на фиг. 10A и 10B, каждое изображение 261HSA визуализации имеет конфигурацию, включающую в себя: изображение 261e сетки; изображение 261f транспортного средства; изображения 263SFL и 263SBL колес; и линию 266 отображения подъема.
[0068] Изображение 261e сетки представляет собой фоновое изображение, созданное посредством пересечения множества линий друг с другом в решетчатой форме.
Изображение 261f транспортного средства представляет собой, например, изображение левой стороны типа транспортного средства, идентичного автомобилю V, если смотреть спереди на чертеже и отображается наложенным на изображение 261e сетки.
Изображение 263SFL колеса представляет собой изображение переднего левого колеса в изображении 261f транспортного средства.
Изображение 263SBL колеса представляет собой изображение заднего левого колеса в изображении 261f транспортного средства.
Линия 266 отображения подъема представляет собой прямую линию (причем прямая линия имеет угол наклона, например, равный 15 [°] относительно нижнего края третьей области 260C отображения), идущую под углом влево вверх от нижней стороны правого края экрана третьей области 260C отображения к левому краю экрана, и представляет собой линию, которая выражает подъем, если смотреть в поперечном направлении.
Следовательно, изображение 261e сетки не отображается в области напротив стороны поверхности дороги в третьей области 260c отображения относительно линии 266 отображения подъема, рассматриваемой в качестве границы, а отображается только в области на стороне поверхности дороги.
[0069] Изображение 261f транспортного средства размещается таким образом, что конец верхушки с передней стороны транспортного средства изображения 261f транспортного средства может быть обращен под углом влево вверх вдоль линии 266 отображения подъема, так что нижние края шин для изображений 263SFL и 263SBL колес могут контактировать с линией 266 отображения подъема со стороны соответствующей линии 266 отображения подъема, которая становится поверхностью дороги. Другими словами, изображение 261HSA транспортного средства представляет собой изображение, показывающее состояние, в котором транспортное средство остановлено на пути преодолевания подъема.
Кроме того, в этом варианте осуществления, контроллер 30 отображения отображает фрагменты шин изображений 263SFL и 263SBL колес в изображении 261HSA(S) визуализации посредством цвета отображения, вызывающего эффект отображения, который позволяет фрагментам шин выглядеть так, как будто они излучают свет. В дальнейшем в этом документе, этот режим отображения упоминается в качестве отображения с подсвечиванием колес.
[0070] Кроме того, в этом варианте осуществления, контроллер 30 отображения отображает фрагменты шин изображений 263SFL и 263SBL колес в изображении 261HSA(0) визуализации в режиме отображения поочередного повторения состояния отображения фрагментов шин посредством цвета отображения, вызывающего эффект отображения, который позволяет фрагментам шин выглядеть так, как будто они излучают свет, и состояния отображения фрагментов шин посредством цвета отображения (например, цвета с низкой яркостью (светлотой), к примеру, черного цвета), который позволяет фрагментам шин выглядеть так, как будто они погашены, в отличие от отображения с излучением света. В дальнейшем в этом документе, этот режим отображения упоминается в качестве отображения в форме мигания колес.
[0071] Кроме того, в этом варианте осуществления, как показано в нижнем фрагменте по фиг. 10A, контроллер 30 отображения выполняет управление отображением для того, чтобы подсвечивать и отображать индикаторную лампу 240HSA для HSA синхронно с отображением с подсвечиванием колес визуализирующего изображения 261HSA(S) визуализации.
Кроме того, в этом варианте осуществления, как показано в нижнем фрагменте по фиг. 10B, контроллер 30 отображения выполняет управление отображением для того, чтобы мигать и отображать индикаторную лампу 240HSA для HSA синхронно с управлением в форме мигания колес изображения 261HSA(0) визуализации.
[0072] Изображение для отображения режима помощи для HDC
Далее, на основе фиг. 11, приводится описание изображения для отображения режима помощи, которое должно отображаться в то время, когда работает управление HDC помощью при вождении. Фиг. 11 является видом, показывающим пример изображения 261HDC визуализации, которое представляет собой изображение для отображения режима помощи для HDC.
Изображение 261HDC визуализации, показанное на фиг. 11, представляет собой изображение для отображения режима помощи, которое должно отображаться, когда флаг HDC рабочего режима находится в активированном состоянии. Следует отметить, что управление HDC помощью при вождении активируется посредством перевода выделенного переключателя (в дальнейшем в этом документе называется "HDC-переключателем") в активированное состояние после перевода автомобиля V в фиксированный режим работы привода на четыре колеса.
Как показано на фиг. 11, изображение 261HDC визуализации имеет конфигурацию, включающую в себя: изображение 261g сетки; изображение 261i транспортного средства; изображения 263SFL и 263SBL колес; и линию 267 отображения спуска.
[0073] Изображение 261g сетки представляет собой фоновое изображение с шаблоном, созданным посредством пересечения множества линий друг с другом в решетчатой форме.
Изображение 261i транспортного средства представляет собой, например, изображение левой стороны типа транспортного средства, идентичного автомобилю V, когда изображение левой стороны просматривается спереди на чертеже и отображается наложенным на изображение 261g сетки.
Линия 267 отображения спуска представляет собой волнистую линию (причем волнистая линия имеет угол наклона, например, в 15 [°] относительно нижнего края третьей области 260C отображения), идущую под углом вправо вверх от нижней стороны левого края экрана третьей области 260C отображения к правому краю экрана, и представляет собой линию, которая выражает спуск, который просматривается в поперечном направлении и имеет плохое состояние поверхности дороги.
Следовательно, изображение 261g сетки не отображается в области напротив стороны поверхности дороги в третьей области 260c отображения относительно линии 267 отображения спуска, рассматриваемой в качестве границы, а отображается только в области на стороне поверхности дороги.
[0074] Изображение 261i транспортного средства размещается таким образом, что конец верхушки с передней стороны транспортного средства изображения 261i транспортного средства может быть обращен под углом влево вниз вдоль линии 267 отображения спуска, так что нижние края шин для изображений 263SFL и 263SBL колес могут контактировать с линией 267 отображения спуска со стороны поверхности дороги линии 267 отображения спуска. Другими словами, изображение транспортного средства 261HDC представляет собой изображение, показывающее состояние, в котором транспортное средство едет вниз на спуске.
Кроме того, в этом варианте осуществления, контроллер 30 отображения отображает фрагменты шин изображений 263SFL и 263SBL колес в изображении 261HDC визуализации посредством цвета отображения, вызывающего эффект отображения, который позволяет фрагментам шин выглядеть так, как будто они излучают свет (это отображение представляет собой отображение с подсвечиванием колес).
[0075] Следует отметить, что, относительно вышеописанных видов ATC, AEB, ARC и SMB управления помощью при вождении, ситуации их возникновения являются ситуациями, когда нагрузка при вождении является относительно большой, причем ситуации включают в себя ситуации, в которых скорость транспортного средства автомобиля V является относительно высокой, автомобиль V выполняет операцию поворота, и автомобиль V преодолевает неровности, которые обеспечивают большой ввод. Следовательно, в таких ситуациях, как описано выше, для водителя становится затруднительным долго рассматривать экран 260 отображения жидкокристаллического устройства 26 отображения и распознавать подробный отображаемый контент на нем. Соответственно, в этом варианте осуществления, для видов ATC, AEB, ARC и SMB управления помощью при вождении, в которых нагрузки при вождении являются относительно высокими, изображение транспортного средства размещается на сетчатообразном плоском изображении, и помимо этого, отображается изображение для отображения режима помощи со структурой просмотра сверху вниз на транспортное средство от верхней задней части. Помимо этого, в то время, когда виды ATC, AEB, ARC и SMB управления помощью при вождении работают, фрагмент изображения сетки на периферии изображения транспортного средства подвергается отображению с излучением света. Кроме того, в окружении движения, в котором управление помощью при вождении четко работает в такое время поворотного движения, форма изображения сетки изменяется в ответ на операцию водителя в дополнение к отображению с излучением света фрагмента изображения сетки на периферии изображения транспортного средства. Таким образом, у водителя появляется возможность распознавать то, какой тип из видов управления помощью при вождении работает, посредством мгновенного перемещения линии взгляда и посредством периферийного поля зрения без долгого рассматривания экрана 260 отображения жидкокристаллического устройства 26 отображения.
[0076] Между тем, в вышеописанных видах HSA и HDC управления помощью при вождении, их оперативные ситуации являются ситуациями, когда нагрузка при вождении является относительно небольшой, причем ситуации включают в себя ситуации, в которых автомобиль V остановлен на пути подъема с крутым градиентом, и в которых автомобиль V движется на спуске с крутым градиентом, по снежной дороге и т.п. на относительно низкой скорости транспортного средства. Следовательно, в таких ситуациях, как описано выше, для водителя становится относительно просто видеть экран 260 отображения жидкокристаллического устройства 26 отображения и распознавать отображаемый контент на нем. Соответственно, в этом варианте осуществления, во время работы каждого из видов HSA и HDC управления помощью при вождении, в которых нагрузки при вождении являются относительно небольшими, отображается изображение транспортного средства, в котором сторона транспортного средства просматривается спереди на чертеже, и помимо этого, уведомление относительно рабочего режима управления помощью при вождении выдано посредством отображения с излучением света или отображения в форме мигания фрагментов шин изображения колеса в изображении транспортного средства. Таким образом, у водителя появляется возможность распознавать относительно подробную оперативную ситуацию управления помощью при вождении из отображаемого контента жидкокристаллического устройства 26 отображения. Кроме того, в этом варианте осуществления, фрагмент изображения транспортного средства изображения 261HSA визуализации имеет форму, аналогичную индикаторной лампе 240HSA. Таким образом, для водителя становится просто распознавать то, что управление HSA помощью при вождении работает во время наблюдения изображения 261HSA визуализации.
[0077] Работа
Ниже приводится описание операций этого варианта осуществления на основе фиг. 12-17.
Операция управления отображением на основе информации минимального времени отображения
На основе фиг. 12, приводится описание операций во время управления отображением для изображения для отображения режима помощи, которое основано на информации минимального времени отображения контроллера 30 отображения. Фиг. 12 является временной диаграммой для пояснения примера работы во время управления отображением, которое основано на информации минимального времени отображения этого варианта осуществления.
Во-первых, приводится описание примера работы в случае, если, как показано в (1) на фиг. 12, время в то время, когда флаг X рабочего режима управления X помощью при вождении находится в активированном состоянии, т.е. время tox работы управления X помощью при вождении, превышает минимальное время tminx отображения. Следует отметить, что в этом варианте осуществления, управление X помощью при вождении представляет собой любое управление из видов ATC, AEB, ARC, SMB и HDC управления помощью при вождении.
[0078] При определении того, что флаг X рабочего режима, введенный из процессора 300A ввода, переходит в активированное состояние, процессор 300C управления задержкой времени отображения считывает минимальное время tminx отображения, которое соответствует управлению X помощью при вождении, в качестве информации минимального времени отображения из запоминающего устройства 302 информации визуализации. После этого процессор 300C управления задержкой времени отображения вводит считываемое минимальное время tminx отображения и введенные флаги рабочих режимов (все флаги рабочих режимов) в процессор 300D выходных сигналов.
[0079] При определении того, что флаг X рабочего режима переходит в активированное состояние на основе флага рабочего режима, введенного из процессора 300C управления задержкой времени отображения, процессор 300D выходных сигналов считывает информацию шаблона отображения, которая соответствует управлению X помощью при вождении, из запоминающего устройства 302 информации визуализации. Кроме того, на основе считываемой информации шаблона отображения, процессор 300D выходных сигналов формирует инструкцию X по началу отображения для изображения X для отображения режима помощи (в дальнейшем в этом документе называется " изображением визуализации X"), соответствующую управлению X помощью при вождении. Кроме того, процессор 300D выходных сигналов передает сформированную инструкцию X по началу отображения в измерительное устройство 20 через сеть 50 связи. Между тем, процессор 300D выходных сигналов выводит инструкцию по началу для операции подсчета в таймер 304 для измерения времени отображения и начинает операцию подсчета (измерение времени отображения) посредством таймера 304 для измерения времени отображения.
[0080] Кроме того, при приеме инструкции X по началу отображения из процессора 300D выходных сигналов, контроллер 28 измерительных приборов измерительного устройства 20считывает информацию относительно изображения визуализации X, которое соответствует принимаемой инструкции X по началу отображения, из запоминающего устройства 29 изображений визуализации. Кроме того, контроллер 28 измерительных приборов получает разнообразную информацию, которая должна отображаться в вышеописанной первой области 260А отображения, второй области 260B отображения и четвертой области 260D отображения, через сеть 50 связи из других контроллеров, измерительных приборов и т.п. Затем контроллер 28 измерительных приборов формирует сигнал X отображения изображений для изображения, которое должно отображаться на экране 260 отображения, на основе считываемой информации относительно изображения визуализации X и полученного множества информации и вводит сформированный сигнал X отображения изображений в жидкокристаллическое устройство 26 отображения. Следует отметить, что, относительно множества информации, которая должна отображаться в вышеописанной первой области 260А отображения, второй области 260B отображения и четвертой области 260D отображения, ее контент изменяется в ответ на время и ситуацию, и, следовательно, отображение изображений на экран 260 отображения обновляется в предварительно установленном цикле.
[0081] Как показано в (2) на фиг. 12, жидкокристаллическое устройство 26 отображения отображает изображение визуализации X на экране 260 отображения на основе сигнала X отображения изображений, введенного в него.
Следует отметить, что, в примере, показанном в (1) на фиг. 12, время tox работы управления X помощью при вождении превышает минимальное время tminx отображения. Следовательно, процессор 300D выходных сигналов не завершает отображение изображения визуализации X, даже если подсчитанное значение таймера 304 для измерения времени отображения превышает минимальное время tminx отображения, но, как показано в (1) и (2) на фиг. 12, выполняет управление отображением таким образом, чтобы продолжать отображать изображение визуализации X до тех пор, пока флаг X рабочего режима не перейдет в отключенное состояние. В частности, при определении того, что введенный флаг X рабочего режима переходит в отключенное состояние, процессор 300D выходных сигналов формирует инструкцию по окончанию отображения для изображения визуализации X. После этого процессор 300D выходных сигналов передает сформированную инструкцию по окончанию отображения в измерительное устройство 20через сеть 50 связи.
[0082] При приеме инструкции по окончанию отображения из процессора 300D выходных сигналов, контроллер 28 измерительных приборов измерительного устройства 20 считывает информацию относительно изображения 261DF по умолчанию из запоминающего устройства 29 изображений визуализации. Кроме того, контроллер 28 измерительных приборов получает разнообразную информацию, которая должна отображаться в вышеописанной первой области 260А отображения, второй области 260B отображения и четвертой области 260D отображения, через сеть 50 связи из других контроллеров, измерительных приборов и т.п. Затем контроллер 28 измерительных приборов формирует сигнал DF отображения изображений для изображения, которое должно отображаться на экране 260 отображения, на основе считываемой информации относительно изображения 261DF по умолчанию и полученного множества информации и вводит сформированный сигнал DF отображения изображений в жидкокристаллическое устройство 26 отображения. Жидкокристаллическое устройство 26 отображения отображает изображение 261DF по умолчанию на экране 260 отображения на основе сигнала DF отображения изображений, введенного в него.
[0083] Далее приводится описание примера работы в случае, если время tox работы управления X помощью при вождении меньше минимального времени tminx отображения. В этом случае, даже в случае определения того, что флаг X рабочего режима, введенный из процессора 300C управления задержкой времени отображения, переходит в отключенное состояние, процессор 300D выходных сигналов выполняет управление отображением таким образом, чтобы непрерывно отображать изображение визуализации X до тех пор, пока подсчитанное значение не станет значением, равным или превышающим значение, которое указывает минимальное время tminx отображения, как показано в (4) на фиг. 12.
Другими словами, при определении того, что подсчитанное значение таймера 304 для измерения времени отображения становится минимальным временем tminx отображения, процессор 300D выходных сигналов формирует инструкцию по окончанию отображения для изображения визуализации X. После этого процессор 300D выходных сигналов передает сформированную инструкцию по окончанию отображения в измерительное устройство 20через сеть 50 связи.
[0084] Далее приводится описание примера работы в случае, если управление B помощью при вождении впоследствии активируется в то время, когда работает управление A помощью при вождении. Следует отметить, что в этом варианте осуществления, управление A помощью при вождении представляет собой любое управление из видов ATC, AEB, ARC, SMB и HDC управления помощью при вождении. Кроме того, в этом варианте осуществления, управление B помощью при вождении представляет собой любое управление из видов ATC, AEB, ARC, SMB и HDC управления помощью при вождении, которое отличается от управления A помощью при вождении.
Как показано в (5) и (6) на фиг. 12, когда активируется управление B помощью при вождении в то время, когда управление A помощью при вождении работает, процессор 300C управления задержкой времени отображения определяет то, что флаг B рабочего режима переходит в активированное состояние в течение периода определения того, что флаг A рабочего режима, введенный из процессора 300A ввода, находится в активированном состоянии.
Процессор 300C управления задержкой времени отображения считывает минимальное время tminB отображения, которое соответствует управлению B помощью при вождении, из запоминающего устройства 302 информации визуализации. После этого процессор 300C управления задержкой времени отображения вводит считываемое минимальное время tminB отображения и введенные флаги рабочих режимов в процессор 300D выходных сигналов.
[0085] При определении того, что флаг B рабочего режима переходит в активированное состояние в то время, когда флаг A рабочего режима находится в активированном состоянии, на основе введенного флага рабочего режима, процессор 300D выходных сигналов считывает информацию шаблона отображения, которая соответствует управлению B помощью при вождении, из запоминающего устройства 302 информации визуализации. Затем на основе считываемой информации шаблона отображения процессор 300D выходных сигналов формирует инструкцию B по переключению отображения для изображения визуализации B, соответствующего управлению B помощью при вождении. Кроме того, процессор 300D выходных сигналов передает сформированную инструкцию B по переключению отображения в измерительное устройство 20 через сеть 50 связи. Между тем, процессор 300D выходных сигналов выводит инструкцию сброса в таймер 304 для измерения времени отображения и сбрасывает подсчитанное значение, помимо этого, далее выводит инструкцию по началу для операции подсчета в таймер 304 для измерения времени отображения и начинает операцию подсчета посредством таймера 304 для измерения времени отображения.
[0086] Между тем, при приеме инструкции B по переключению отображения из процессора 300D выходных сигналов, контроллер 28 измерительных приборов измерительного устройства 20 считывает информацию относительно изображения визуализации B, которое соответствует принимаемой инструкции B по переключению отображения, из запоминающего устройства 29 изображений визуализации. Кроме того, контроллер 28 измерительных приборов получает разнообразную информацию, которая должна отображаться в вышеописанной первой области 260А отображения, второй области 260B отображения и четвертой области 260D отображения, через сеть 50 связи из других контроллеров, измерительных приборов и т.п. Затем контроллер 28 измерительных приборов формирует сигнал B отображения изображений для изображения, которое должно отображаться на экране 260 отображения, на основе считываемой информации относительно изображения визуализации B и полученного множества информации и вводит сформированный сигнал B отображения изображений в жидкокристаллическое устройство 26 отображения.
Как показано в (7) на фиг. 12, жидкокристаллическое устройство 26 отображения отображает изображение визуализации B вместо отображаемого изображения визуализации A на основе сигнала B отображения изображений, введенного в него.
[0087] Кроме того, как показано в (7) на фиг. 12, время toB работы управления B помощью при вождении меньше минимального времени tminB отображения. Следовательно, даже в случае определения того, что флаг B рабочего режима, введенный из процессора 300C управления задержкой времени отображения, переходит в отключенное состояние, процессор 300D выходных сигналов выполняет управление отображением таким образом, чтобы непрерывно отображать изображение визуализации B до тех пор, пока подсчитанное значение не станет значением, равным или превышающим значение, которое указывает минимальное время tminB отображения, как показано в (7) на фиг. 12.
[0088] Операция управления отображением во время работы управления ATC или AEB помощью при вождении
Далее приводится описание операции управления отображением во время работы управления ATC или AEB помощью при вождении на основе фиг. 5-7, фиг. 13 и фиг. 14.
Фиг. 13 является временной диаграммой для пояснения примера операции управления отображением в то время, когда работает управление ATC или AEB помощью при вождении. Фиг. 14 является видом, показывающим пример окружения движения, в котором работает управление ATC или AEB помощью при вождении. Следует отметить, что, на фиг. 13 и фиг. 14, время t2 в обоих случаях указывает идентичный момент времени, и время t4 в обоих случаях указывает идентичный момент времени.
Предполагается, что, как показано на фиг. 13, во время t1 активируется управление ATC или AEB помощью при вождении, и флаг ATC или AEB рабочего режима переходит в активированное состояние.
В этом случае, процессор 300C управления задержкой времени отображения считывает информацию минимального времени отображения (здесь, оно задается в качестве минимального времени tminA отображения), которое соответствует управлению ATC или AEB помощью при вождении, из запоминающего устройства 302 информации визуализации. После этого процессор 300C управления задержкой времени отображения вводит считываемое минимальное время tminA отображения и введенные флаги рабочих режимов в процессор 300D выходных сигналов.
[0089] При определении того, что флаг ATC или AEB рабочего режима переходит в активированное состояние на основе флага рабочего режима, введенного из процессора 300C управления задержкой времени отображения, процессор 300D выходных сигналов считывает информацию шаблона отображения, которая соответствует управлению ATC или AEB помощью при вождении, из запоминающего устройства 302 информации визуализации. После этого процессор 300D выходных сигналов формирует инструкцию по началу отображения изображения визуализации, которое соответствует управлению ATC или AEB помощью при вождении, на основе информации направления рулевого управления (флага рулевого управления влево и флага рулевого управления вправо), введенной из процессора 300A ввода.
[0090] В частности, во время t1 каждый из флага рулевого управления влево и флага рулевого управления вправо находится в отключенном состоянии, и, соответственно, процессор 300D выходных сигналов формирует инструкцию по началу отображения для изображения 261IN для отображения во время вмешательства в управление. После этого процессор 300D выходных сигналов передает сформированную инструкцию по началу отображения в измерительное устройство 20через сеть 50 связи.
Таким образом, на экране 260 отображения жидкокристаллического устройства 26 отображения, изображение 261IN для отображения во время вмешательства в управление, показанное на фиг. 6, отображается вместо изображения 261DF по умолчанию, показанного на фиг. 5, которое отображается.
[0091] Затем, как показано на фиг. 14, когда автомобиль V начинает движение по дороге с изгибом влево, и водитель поворачивает рулевое колесо 1 против часовой стрелки на величину рулевого управления, равную пороговому значению угла рулевого управления или более, во время t2, далее, как показано на фиг. 13, флаг рулевого управления влево переходит в активированное состояние во время t2. Когда флаг рулевого управления влево переходит в активированное состояние, процессор 300D выходных сигналов формирует инструкцию по переключению отображения для изображения 261LC визуализации рулевого управления влево. После этого процессор 300D выходных сигналов передает сформированную инструкцию по переключению отображения в измерительное устройство 20 через сеть 50 связи.
Таким образом, на экране 260 отображения жидкокристаллического устройства 26 отображения, изображение 261LC визуализации рулевого управления влево, показанное на фиг. 7A, отображается вместо отображаемого изображения 261IN для отображения во время вмешательства в управление.
[0092] После этого, когда водитель выполняет рулевого управления, чтобы возвращать рулевое колесо 1 в нейтральную позицию, и оба из флага рулевого управления влево и флага рулевого управления вправо переходят в отключенное состояние во время t3, как показано на фиг. 13, далее процессор 300D выходных сигналов формирует инструкцию по переключению отображения на изображение 261IN для отображения во время вмешательства в управление. После этого процессор 300D выходных сигналов передает сформированную инструкцию по переключению отображения в измерительное устройство 20через сеть 50 связи.
Таким образом, на экране 260 отображения жидкокристаллического устройства 26 отображения, изображение 261IN для отображения во время вмешательства в управление, показанное на фиг. 6, отображается вместо отображаемого изображения 261LC визуализации рулевого управления влево.
[0093] Затем, как показано на фиг. 14, когда автомобиль V начинает движение по дороге с изгибом вправо, и водитель поворачивает рулевое колесо 1 по часовой стрелке на величину рулевого управления, равную пороговому значению угла рулевого управления или более во время t4, далее, как показано на фиг. 13, флаг рулевого управления вправо переходит в активированное состояние во время t4. Когда флаг рулевого управления вправо переходит в активированное состояние, процессор 300D выходных сигналов формирует инструкцию по переключению отображения на изображение 261RC визуализации рулевого управления вправо. После этого процессор 300D выходных сигналов передает сформированную инструкцию по переключению отображения в измерительное устройство 20 через сеть 50 связи.
Таким образом, на экране 260 отображения жидкокристаллического устройства 26 отображения, изображение 261RC визуализации рулевого управления вправо, показанное на фиг. 7B, отображается вместо отображаемого изображения 261IN для отображения во время вмешательства в управление.
[0094] После этого, когда водитель выполняет рулевого управления, чтобы возвращать рулевое колесо 1 в нейтральную позицию, и флаг рулевого управления влево переходит в отключенное состояние во время t5, как показано на фиг. 13, далее процессор 300D выходных сигналов формирует инструкцию по переключению отображения на изображение 261IN для отображения во время вмешательства в управление. После этого процессор 300D выходных сигналов передает сформированную инструкцию по переключению отображения в измерительное устройство 20через сеть 50 связи.
Таким образом, на экране 260 отображения жидкокристаллического устройства 26 отображения, изображение 261IN для отображения во время вмешательства в управление, показанное на фиг. 6, отображается вместо отображаемого изображения 261RC визуализации рулевого управления вправо.
[0095] Затем, как показано на фиг. 13, когда флаг ATC или AEB рабочего режима переходит в отключенное состояние во время t6, процессор 300D выходных сигналов формирует инструкцию по окончанию отображения. После этого процессор 300D выходных сигналов передает сформированную инструкцию по окончанию отображения в измерительное устройство 20через сеть 50 связи.
Таким образом, на экране 260 отображения жидкокристаллического устройства 26 отображения, изображение 261DF по умолчанию, показанное на фиг. 5, отображается вместо отображаемого изображения 261IN для отображения во время вмешательства в управление.
Как описано выше, в этом варианте осуществления, когда активируется флаг ATC или AEB рабочего режима, три изображения, которые представляет собой изображение 261IN для отображения во время вмешательства в управление, изображение 261LC визуализации рулевого управления влево и изображение 261RC визуализации рулевого управления вправо, отображаются с возможностью переключения, в силу чего водитель уведомляется в отношении того, что управление ATC или AEB помощью при вождении работает.
[0096] Операция управления отображением во время работы управления SMB помощью при вождении
Далее приводится описание операции управления отображением во время работы управления SMB помощью при вождении на основе фиг. 9A-9E и фиг. 15. Фиг. 15 является временной диаграммой для пояснения примера операции управления отображением во время работы управления SMB помощью при вождении.
Как показано на фиг. 15, SMB-переключатель включается во время t1, в силу чего флаг SMB рабочего режима переходит в активированное состояние.
Таким образом, процессор 300C управления задержкой времени отображения считывает информацию минимального времени отображения (здесь, оно задается в качестве минимального времени tminS отображения), которое соответствует управлению SMB помощью при вождении, из запоминающего устройства 302 информации визуализации. После этого процессор 300C управления задержкой времени отображения вводит считываемое минимальное время tminS отображения и введенные флаги рабочих режимов в процессор 300D выходных сигналов.
[0097] При определении того, что флаг SMB рабочего режима, который вводится из процессора 300C управления задержкой времени отображения, переходит в активированное состояние, процессор 300D выходных сигналов считывает информацию шаблона отображения, которая соответствует управлению SMB помощью при вождении, из запоминающего устройства 302 информации визуализации. Затем на основе считываемой информации шаблона отображения процессор 300D выходных сигналов формирует инструкцию по началу отображения для изображения визуализации, соответствующего управлению SMB помощью при вождении.
В частности, во время t1 процессор 300D выходных сигналов формирует инструкцию SMB1 по началу отображения для изображения 261SMB1 визуализации. После этого процессор 300D выходных сигналов передает сформированную инструкцию SMB1 по началу отображения в измерительное устройство 20через сеть 50 связи. Между тем, процессор 300D выходных сигналов выводит инструкцию по началу для операции подсчета в таймер 304 для измерения времени отображения и начинает операцию подсчета посредством таймера 304 для измерения времени отображения.
[0098] Между тем, при приеме инструкции SMB1 по началу отображения, контроллер 28 измерительных приборов измерительного устройства 20считывает информацию относительно изображения 261SMB1 визуализации, которое соответствует принимаемой инструкции SMB1 по началу отображения, из запоминающего устройства 29 изображений визуализации на основе принимаемой инструкции SMB1 по началу отображения.
Кроме того, контроллер 28 измерительных приборов получает разнообразную информацию, которая должна отображаться в первой области 260А отображения, второй области 260B отображения и четвертой области 260D отображения экрана 260 отображения, через сеть 50 связи из других контроллеров, измерительных приборов и т.п. Затем контроллер 28 измерительных приборов формирует сигнал SMB1 отображения изображений для изображения, которое должно отображаться на экране 260 отображения, на основе считываемой информации относительно изображения SMB1 визуализации и полученного множества информации и вводит сформированный сигнал SMB1 отображения изображений в жидкокристаллическое устройство 26 отображения.
Таким образом, изображение 261SMB1 визуализации, показанное на фиг. 9A, отображается на экране 260 отображения жидкокристаллического устройства 26 отображения.
[0099] Затем, при определении того, что предварительно установленное время отображения истекает, на основе подсчитанного значения таймера 304 для измерения времени отображения, процессор 300D выходных сигналов формирует инструкцию SMB2 по началу отображения для изображения 261SMB2 визуализации. Другими словами, во время t2, показанное на фиг. 15, процессор 300D выходных сигналов формирует инструкцию SMB2 по началу отображения для изображения 261SMB2 визуализации и передает сформированную инструкцию SMB2 по началу отображения в измерительное устройство 20 через сеть 50 связи.
Таким образом, на экране 260 отображения жидкокристаллического устройства 26 отображения, изображение 261SMB2 визуализации, показанное на фиг. 9B, отображается вместо изображения 261SMB1 визуализации, показанного на фиг. 9A.
[0100] Затем, на основе подсчитанного значения таймера 304 для измерения времени отображения, процессор 300D выходных сигналов формирует инструкцию SMB3 по началу отображения для изображения 261SMB3 визуализации во время t3 после истечения предварительно установленного времени отображения со времени t2, показанного на фиг. 15. После этого процессор 300D выходных сигналов передает сформированную инструкцию SMB3 по началу отображения в измерительное устройство 20 через сеть 50 связи.
Таким образом, на экране 260 отображения жидкокристаллического устройства 26 отображения, изображение 261SMB3 визуализации, показанное на фиг. 9B, отображается вместо изображения 261SMB2 визуализации, показанного на фиг. 9B.
Затем, на основе подсчитанного значения таймера 304 для измерения времени отображения, процессор 300D выходных сигналов формирует инструкцию SMB4 по началу отображения для изображения 261SMB4 визуализации во время t4 после истечения предварительно установленного времени отображения со времени t3, показанного на фиг. 15. После этого процессор 300D выходных сигналов передает сформированную инструкцию SMB4 по началу отображения в измерительное устройство 20 через сеть 50 связи.
Таким образом, на экране 260 отображения жидкокристаллического устройства 26 отображения, изображение 261SMB4 визуализации, показанное на фиг. 9D, отображается вместо изображения 261SMB3 визуализации, показанного на фиг. 9C.
[0101] Затем, на основе подсчитанного значения таймера 304 для измерения времени отображения, процессор 300D выходных сигналов формирует инструкцию SMB5 по началу отображения для изображения 261SMB5 визуализации во время t5 после истечения предварительно установленного времени отображения со времени t4, показанного на фиг. 15. После этого процессор 300D выходных сигналов передает сформированную инструкцию SMB5 по началу отображения в измерительное устройство 20 через сеть 50 связи.
Таким образом, на экране 260 отображения жидкокристаллического устройства 26 отображения, изображение 261SMB5 визуализации, показанное на фиг. 9E, отображается вместо изображения 261SMB4 визуализации, показанного на фиг. 9D.
Другими словами, в предварительно установленный интервал времени отображения, изображения 261SMB1-261SMB5 визуализации непрерывно отображаются в порядке от изображения 261SMB1 визуализации через изображение 261SMB2 визуализации, изображение 261SMB3 визуализации и изображение 261SMB4 визуализации до изображения 261SMB5 визуализации. Таким образом, выполняется отображение анимации, в котором области AL1-AL4 отображения эффекта с левой стороны и области AR1-AR4 отображения эффекта с правой стороны подвергаются отображению с излучением света со сторон около изображения 261b транспортного средства.
[0102] Следует отметить, что, как показано на фиг. 15, после отображения изображения 261SMB5 визуализации, контроллер 30 отображения выполняет управление отображением для того, чтобы поддерживать отображение изображения 261SMB5 визуализации в ходе работы управления SMB помощью при вождении.
После этого, когда водитель выключает SMB-переключатель, далее, как показано на фиг. 15, флаг SMB рабочего режима переходит в отключенное состояние во время t6.
Таким образом, процессор 300D выходных сигналов определяет то, что введенный флаг SMB рабочего режима переходит в отключенное состояние. В таком случае, после этого в предварительно установленный интервал времени отображения, процессор 300D выходных сигналов выполняет управление отображением для того, чтобы непрерывно отображать изображения 261SMB1-261SMB5 визуализации в порядке от изображения 261SMB5 визуализации через изображение 261SMB4 визуализации, изображение 261SMB3 визуализации и изображение 261SMB2 визуализации до изображения 261SMB1 визуализации.
[0103] Другими словами, при определении того, что флаг SMB рабочего режима переходит в отключенное состояние, процессор 300D выходных сигналов формирует инструкцию SMB4 по началу отображения для изображения 261SMB4 визуализации. Другими словами, во время t6, показанное на фиг. 15, процессор 300D выходных сигналов формирует инструкцию SMB4 по началу отображения для изображения 261SMB4 визуализации и передает сформированную инструкцию SMB4 по началу отображения в измерительное устройство 20 через сеть 50 связи. Между тем, процессор 300D выходных сигналов выводит инструкцию сброса в таймер 304 для измерения времени отображения и сбрасывает подсчитанное значение, помимо этого, далее выводит инструкцию по началу для операции подсчета в таймер 304 для измерения времени отображения и начинает операцию подсчета посредством таймера 304 для измерения времени отображения.
Таким образом, на экране 260 отображения жидкокристаллического устройства 26 отображения, изображение 261SMB4 визуализации, показанное на фиг. 9D, отображается вместо изображения 261SMB5 визуализации, показанного на фиг. 9E.
[0104] Затем, при определении того, что предварительно установленное время отображения истекает, на основе подсчитанного значения таймера 304 для измерения времени отображения, процессор 300D выходных сигналов формирует инструкцию SMB3 по началу отображения для изображения 261SMB3 визуализации. Другими словами, во время t7, показанное на фиг. 15, процессор 300D выходных сигналов формирует инструкцию SMB3 по началу отображения для изображения 261SMB3 визуализации и передает сформированную инструкцию SMB3 по началу отображения в измерительное устройство 20 через сеть 50 связи.
Таким образом, на экране 260 отображения жидкокристаллического устройства 26 отображения, изображение 261SMB3 визуализации, показанное на фиг. 9C, отображается вместо изображения 261SMB4 визуализации, показанного на фиг. 9D.
[0105] Затем, на основе подсчитанного значения таймера 304 для измерения времени отображения, процессор 300D выходных сигналов формирует инструкцию SMB2 по началу отображения для изображения 261SMB2 визуализации во время t8 после истечения предварительно установленного времени отображения со времени t7, показанного на фиг. 15. После этого процессор 300D выходных сигналов передает сформированную инструкцию SMB2 по началу отображения в измерительное устройство 20 через сеть 50 связи.
Таким образом, на экране 260 отображения жидкокристаллического устройства 26 отображения, изображение 261SMB2 визуализации, показанное на фиг. 9B, отображается вместо изображения 261SMB3 визуализации, показанного на фиг. 9C.
[0106] Затем, на основе подсчитанного значения таймера 304 для измерения времени отображения, процессор 300D выходных сигналов формирует инструкцию SMB1 по началу отображения для изображения 261SMB1 визуализации во время t9 после истечения предварительно установленного времени отображения со времени t8, показанного на фиг. 15. После этого процессор 300D выходных сигналов передает сформированную инструкцию SMB1 по началу отображения в измерительное устройство 20 через сеть 50 связи.
Таким образом, на экране 260 отображения жидкокристаллического устройства 26 отображения, изображение 261SMB1 визуализации, показанное на фиг. 9A, отображается вместо изображения 261SMB2 визуализации, показанного на фиг. 9B.
[0107] Затем, на основе подсчитанного значения таймера 304 для измерения времени отображения, процессор 300D выходных сигналов формирует инструкцию по началу отображения DF для изображения 261DF по умолчанию во время t10 после истечения предварительно установленного времени отображения со времени t9, показанного на фиг. 15. После этого процессор 300D выходных сигналов передает сформированную инструкцию по началу отображения DF в измерительное устройство 20 через сеть 50 связи.
Таким образом, на экране 260 отображения жидкокристаллического устройства 26 отображения, изображение 261DF по умолчанию, показанное на фиг. 5, отображается вместо изображения 261SMB1 визуализации, показанного на фиг. 9A.
[0108] Операция управления отображением во время работы управления HSA помощью при вождении
Далее приводится описание операции управления отображением во время работы управления HSA помощью при вождении на основе фиг. 16 и фиг. 17A. Фиг. 16 является диаграммой, показывающей пример изменений во времени скорости Vd транспортного средства, рабочей величины Bd нажатия педали тормоза, давления тормозной жидкости и флага HSA рабочего режима в рабочем окружении управления HSA помощью при вождении. Фиг. 17 является видом, показывающим пример хода изменения отображаемого контента экрана 260 отображения и состояния подсвечивания индикаторной лампы 240HSA для HSA относительно хода изменения состояния движения автомобиля V и состояния операции с педалью водителя в рабочем окружении управления HSA помощью при вождении.
[0109] Как показано на фиг. 16, когда водитель нажимает педаль 16 тормоза во время t1 в то время, когда автомобиль V движется на подъеме (это движение считывается посредством датчика наклона), BHS-информация, которая указывает состояние нажатия педали 16 тормоза, передается из устройства 40 помощи при вождении через сеть 50 связи в контроллер 30 отображения. Между тем, как показано на фиг. 16, посредством того факта, что педаль 16 тормоза нажимается, повышается давление тормозной жидкости, и тормоз активируется. Таким образом, скорость Vd транспортного средства снижается.
[0110] Как показано на фиг. 16, в состоянии, в котором скорость Vd транспортного средства продолжает снижаться в течение периода со времени t1 до t2 посредством того факта, что педаль 16 тормоза нажимается, флаг HSA рабочего режима переходит в отключенное состояние. Следовательно, процессор 300A ввода определяет то, что управление HSA помощью при вождении не работает. Кроме того, другие виды управления помощью при вождении не работают здесь, и процессор 300D выходных сигналов реализует обработку управления отображением для изображения 261DF по умолчанию. Таким образом, как показано в столбце жидкокристаллического экрана отображения, соответствующем столбцу состояния торможения на фиг. 17, изображение 261DF по умолчанию отображается на экране 260 отображения жидкокристаллического устройства 26 отображения. Помимо этого, поскольку флаг HSA рабочего режима переходит в отключенное состояние, индикаторная лампа 240HSA для HSA переходит в погашенное состояние, как показано в столбце отображаемого контента индикаторов, соответствующем столбцу состояния торможения на фиг. 17.
[0111] Затем, как показано на фиг. 16, когда скорость Vd транспортного средства становится равной 0 во время t2 в состоянии, в котором педаль 16 тормоза нажимается, флаг HSA рабочего режима переходит в активированное состояние во время t4 после истечения (например, после приблизительно 1 [с]) предварительно установленного времени. Другими словами, флаг HSA рабочего режима в активированном состоянии и другие флаги рабочих режимов в отключенном состоянии передаются из устройства 40 помощи при вождении через сеть 50 связи в контроллер 30 отображения.
[0112] Таким образом, процессор входных сигналов 300A определяет то, что флаг HSA рабочего режима переходит в активированное состояние, на основе принимаемых флагов рабочего режима. Помимо этого, процессор 300A ввода определяет то, что педаль 16 тормоза нажимается, на основе принимаемой BHS-информации. Таким образом, процессор 300A ввода считывает информацию шаблона отображения, которая соответствует управлению HSA помощью при вождении, из запоминающего устройства 302 информации визуализации. После этого процессор 300A ввода формирует инструкцию HSA(S) по началу отображения для изображения 261HSA(S) визуализации управления HSA помощью при вождении и инструкцию по отображению с подсвечиванием для индикаторной лампы 240HSA для HSA. Кроме того, процессор 300A ввода передает инструкцию по отображению визуализации для HSA, которая включает в себя сформированную инструкцию HSA(S) по началу отображения и инструкцию по отображению с подсвечиванием, в измерительное устройство 20через сеть 50 связи.
[0113] Между тем, контроллер 28 измерительных приборов измерительного устройства 20принимает инструкцию по отображению визуализации для HSA, которая исходит из процессора 300A ввода и включает в себя инструкцию HSA(S) по началу отображения и инструкцию по отображению с подсвечиванием. На основе принимаемой инструкции по отображению визуализации для HSA контроллер 28 измерительных приборов считывает информацию относительно изображения 261HSA(S) визуализации, которое соответствует инструкции HSA(S) по началу отображения, из запоминающего устройства 29 изображений визуализации. Кроме того, контроллер 28 измерительных приборов получает разнообразную информацию, которая должна отображаться в первой области 260А отображения, второй области 260B отображения и четвертой области 260D отображения экрана 260 отображения, через сеть 50 связи из других контроллеров, измерительных приборов и т.п. Затем контроллер 28 измерительных приборов формирует сигнал HSA(S) отображения изображений для изображения, которое должно отображаться на экране 260 отображения, на основе считываемой информации относительно изображения HSA(S) визуализации и полученного множества информации и вводит сформированный сигнал HSA(S) отображения изображений в жидкокристаллическое устройство 26 отображения. Одновременно, контроллер 28 измерительных приборов вводит инструкцию по отображению с подсвечиванием для индикаторной лампы 240HSA в индикатор 24b второго измерительного прибора 24.
[0114] Таким образом, как показано в столбце жидкокристаллического экрана отображения, соответствующем столбцу состояния для остановки транспортного средства на фиг. 17, изображение 261HSA(S) визуализации отображается на экране 260 отображения жидкокристаллического устройства 26 отображения. Другими словами, отображается изображение 261HSA(S) визуализации, в котором фрагменты шин изображений 263SFL и 263SBL колес отображаются подсвеченными. Помимо этого, индикаторная лампа 240HSA переходит в подсвеченное состояние, как показано в столбце отображаемого контента индикаторов, соответствующем столбцу состояния для остановки транспортного средства на фиг. 17.
[0115] Затем, как показано на фиг. 16, когда водитель отпускает педаль тормоза 16 во время t4, в то время, когда автомобиль V остановлен на подъеме посредством торможения водителя, операция поддержания давления тормозной жидкости посредством управления HSA помощью при вождении начинается. Таким образом, давление тормозной жидкости удерживается в течение периода (например, максимум 2 [с]) со времени t4 до времени t5, и такое остановленное состояние автомобиля V поддерживается. Кроме того, BHS-информация, которая указывает то, что педаль 16 тормоза находится в отпущенном состоянии, передается из устройства 40 помощи при вождении через сеть 50 связи в контроллер 30 отображения.
[0116] На основе принимаемого флага HSA рабочего режима и BHS-информации, процессор 300A ввода определяет то, что педаль 16 тормоза переходит в отпущенное состояние в ходе работы управления HSA помощью при вождении. Таким образом, процессор 300A ввода формирует инструкцию HSA(O) по началу отображения для изображения 261HSA(0) визуализации и инструкцию по отображению в форме мигания для индикаторной лампы 240HSA. Кроме того, процессор 300A ввода передает инструкцию по отображению визуализации для HSA, которая включает в себя сформированную инструкцию HSA(O) по началу отображения и инструкцию по отображению в форме мигания, в измерительное устройство 20через сеть 50 связи.
[0117] Между тем, контроллер 28 измерительных приборов измерительного устройства 20 принимает инструкцию по отображению визуализации для HSA, которая исходит из процессора 300A ввода и включает в себя инструкцию HSA(O) по началу отображения и инструкцию по отображению в форме мигания. На основе принимаемой инструкции по отображению визуализации для HSA контроллер 28 измерительных приборов считывает информацию относительно изображения 261HSA(0) визуализации, которое соответствует инструкции HSA(O) по началу отображения, из запоминающего устройства 29 изображений визуализации. Кроме того, контроллер 28 измерительных приборов получает разнообразную информацию, которая должна отображаться в первой области 260А отображения, второй области 260B отображения и четвертой области 260D отображения экрана 260 отображения, через сеть 50 связи из других контроллеров, измерительных приборов и т.п. Затем контроллер 28 измерительных приборов формирует сигнал HSA(O) отображения изображений для изображения, которое должно отображаться на экране 260 отображения, на основе считываемой информации относительно изображения визуализации HSA(O) и полученного множества информации и вводит сформированный сигнал HSA(O) отображения изображений в жидкокристаллическое устройство 26 отображения. Одновременно, контроллер 28 измерительных приборов вводит инструкцию по отображению в форме мигания для индикаторной лампы 240HSA в индикатор 24b второго измерительного прибора 24.
[0118] Таким образом, как показано в столбце жидкокристаллического экрана отображения, соответствующем столбцу состояния для поддержания давления тормозной жидкости на фиг. 17, изображение 261HSA(0) визуализации отображается на экране 260 отображения жидкокристаллического устройства 26 отображения. Другими словами, в изображении 261HSA(0) визуализации, фрагменты шин изображений 263SFL и 263SBL колес отображаются таким образом, что они мигают. Помимо этого, индикаторная лампа 240HSA отображается таким образом, что она мигает, как показано в столбце отображаемого контента индикаторов, соответствующем столбцу состояния для поддержания давления тормозной жидкости в транспортном средстве на фиг. 17.
[0119] Затем, как показано на фиг. 16, когда водитель нажимает педаль акселератора (не показана) во время t5, управление HSA помощью при вождении прекращает работу, и давление тормозной жидкости становится равным 0. Другими словами, флаг HSA рабочего режима переходит в отключенное состояние, и флаг HSA рабочего режима в отключенном состоянии и другие флаги рабочих режимов в отключенном состоянии передаются из устройства 40 помощи при вождении через сеть 50 связи в контроллер 30 отображения. Таким образом, процессор 300A ввода определяет то, что управление HSA помощью при вождении не работает. Кроме того, процессор 300D выходных сигналов определяет то, что все флаги рабочих режимов находятся в отключенном состоянии, и реализует обработку управления отображением для изображения 261DF по умолчанию. Таким образом, как показано в столбце жидкокристаллического экрана отображения, соответствующем столбцу состояния для начала движения транспортного средства на фиг. 17, изображение 261DF по умолчанию отображается на экране 260 отображения жидкокристаллического устройства 26 отображения. Помимо этого, поскольку флаг HSA рабочего режима переходит в отключенное состояние, индикаторная лампа 240HSA переходит в погашенное состояние, как показано в столбце отображаемого контента индикаторов, соответствующем столбцу состояния для начала движения транспортного средства на фиг. 17.
Здесь, в этом варианте осуществления, функция контроллера 30 отображения, которая заключается в том, чтобы определять рабочий режим управления помощью при вождении на основе флага рабочего режима, соответствует модулю определения рабочего режима. Функция контроллера 30 отображения, которая заключается в том, чтобы отображать изображение для отображения режима помощи, соответствует модулю управления отображением. Функция в процессоре 300A ввода, которая заключается в том, чтобы обнаруживать направление рулевого управления, соответствует модулю обнаружения угла рулевого управления.
[0120] Кроме того, в этом варианте осуществления, изображения 261a, 261e и 261h сетки, области AL1-AL4 отображения эффекта с левой стороны, области AR1-AR4 отображения эффекта с правой стороны и область 265 отображения эффекта соответствуют фоновому изображению. Помимо этого, изображение 261c сетки с изгибом влево (включающее в себя области 264LL и 264RL отображения эффектов) и изображение 261d сетки с изгибом вправо (включающее в себя области 264LR и 264RR отображения эффектов) соответствуют фоновому изображению.
[0121] Преимущества первого варианта осуществления
В соответствии с этим вариантом осуществления, появляется возможность обеспечивать преимущества, которые описываются ниже.
(1) Контроллер 30 отображения обнаруживает рабочий режим управления помощью при вождении, реализованного посредством автомобильного устройства 40 помощи при вождении. Контроллер 30 отображения отображает изображение для отображения режима помощи, которое представляет собой изображение, имеющее конфигурацию, в которой изображение 261b транспортного средства накладывается на фоновое изображение (например, изображение 261a сетки) в качестве плоского изображения с предварительно определенной формой, на жидкокристаллическом устройстве 26 отображения, предоставленном на приборной панели 21 измерительного устройства 20. При определении того, что активируется управление помощью при вождении, контроллер 30 отображения выполняет управление отображением для того, чтобы изменять режим отображения изображения 261a сетки изображения для отображения режима помощи, которое должно отображаться на жидкокристаллическом устройстве 26 отображения, на предварительно установленный режим отображения.
[0122] Режим отображения фонового изображения (например, изображения 261a сетки) изменяется, в силу чего водитель уведомляется в отношении активации устройства 40 помощи при вождении. Другими словами, изменяется режим отображения не мелких частичных фрагментов изображения 261b транспортного средства, а изображения (например, изображения 261a сетки) фрагмента фона, и, соответственно, у водителя появляется возможность выяснять изменение отображаемого контента посредством мгновенного перемещения линии взгляда и посредством периферийного поля зрения без долгого рассматривания отображаемого контента. Таким образом, даже в ситуации, в которой нагрузка при вождении является большой, появляется возможность точно уведомлять водителя в отношении того, что управление помощью при вождении работает, без раздражения водителя.
[0123] (2) Фоновое изображение выполнено с возможностью включать в себя изображение 261a сетки, которое представляет собой сетчатообразное плоское изображение, и градуированные изображения (например, области 264LL-264RR и 265 эффектов отображения).
Таким образом, появляется возможность отображать рабочий режим управления помощью при вождении посредством изменения режима отображения сетчатообразного плоского изображения, градуированного изображения и т.п. Как результат, появляется возможность выполнять отображение изображений, что дополнительно упрощает для водителя выяснение изменения отображаемого контента.
[0124] (3) Изображение 261b транспортного средства задается в качестве изображения с точки обзора при просмотре вниз на транспортное средство от верхней задней части соответствующего транспортного средства.
Фоновое изображение (изображение 261a сетки) задается в качестве изображения с формой, которая проходит в дальнем и ближнем направлении при задании продольного направления транспортного средства изображения 261b транспортного средства в качестве дальнего и ближнего направления и имеет большую ширину в направлении, перпендикулярном дальнему и ближнему направлению к ближней стороне, и меньшую ширину к дальней стороне.
Таким образом, формируется структура, в которой транспортное средство движется к дальней стороне в фоновом изображении, и появляется возможность выполнять отображение в режиме отображения, в котором фоновое изображение напоминает дорогу, например, посредством деформации фонового изображения в форму, изогнутую в направлении поворота транспортного средства. Следовательно, даже в ситуации, в которой нагрузка при вождении является относительно большой, появляется возможность точно уведомлять водителя в отношении того, что управление помощью при вождении работает, без дополнительного раздражения водителя.
[0125] (4) При определении того, что активируется управление помощью при вождении, контроллер 30 отображения выполняет управление отображением для того, чтобы изменять цвет отображения фрагмента фонового изображения (изображения 261a сетки) в диапазоне расстояний, который предварительно установлен из изображения 261b транспортного средства изображения для отображения режима помощи, на предварительно установленный цвет отображения.
Другими словами, посредством изменения цвета отображения такого фрагмента фонового изображения, водитель уведомляется в отношении того, что управление помощью при вождении работает, и, соответственно, у водителя появляется возможность легко выяснять изменение отображаемого контента посредством мгновенного перемещения линии взгляда и посредством периферийного поля зрения без долгого рассматривания отображаемого контента. Таким образом, у водителя появляется возможность легко распознавать то, что управление помощью при вождении работает, без долгого рассматривания отображаемого контента.
[0126] (5) Контроллер 30 отображения определяет то, активируется или нет, по меньшей мере, одно из управления помощью при вождении (ATC), которое выполнено с возможностью активироваться в то время, когда автомобиль V движется по извилистой дороге, и управлять соответствующими колесами транспортного средства таким образом, чтобы уменьшать задержку скорости относительно вертикальной оси, и управления помощью при вождении (AEB), которое должно добавлять замедление в транспортное средство, с тем чтобы уменьшать нагрузку при вождении во время движения по извилистой дороге. При определении того, что активируется, по меньшей мере, одно управление помощью при вождении, контроллер 30 отображения выполняет управление отображением для того, чтобы изменять форму фонового изображения (изображения 261a сетки) изображения для отображения режима помощи, которое должно отображаться на жидкокристаллическом устройстве 26 отображения, на форму с изгибом (изображение 261LC сетки с изгибом влево, изображение 261RC сетки с изгибом вправо), изогнутую в направлении рулевого управления, которое основано на углу θs рулевого управления, обнаруженном посредством датчика 3 угла рулевого управления.
Другими словами, относительно управления помощью при вождении, в котором рабочее окружение является однозначным, например, в то время, когда автомобиль V движется по извилистой дороге, фрагмент фонового изображения изменяется на форму, совпадающую с рабочим окружением, в дополнение к изменению цвета отображения на периферии изображения транспортного средства. Таким образом, у водителя появляется возможность более легко выяснять изменение отображаемого контента посредством мгновенного перемещения линии взгляда и посредством периферийного поля зрения без долгого рассматривания отображаемого контента. Следовательно, у водителя появляется возможность более легко распознавать то, что управление помощью при вождении работает, без долгого рассматривания отображаемого контента.
[0127] (6) Контроллер 30 отображения накладывает и отображает изображения (изображения 263FL, 263FR, 263BL и 263BR колес) с формой колеса на позиции колес в изображении 261b транспортного средства изображения для отображения режима помощи в то время, когда виды управления помощью при вождении (ATC, AEB), активированные во время операции поворота автомобиля V, работают. Контроллер 30 отображения выполняет управление отображением для того, чтобы отображать изображения 263FL, 263FR, 263BL и 263BR колес посредством предварительно установленного цвета отображения, вызывающего эффект отображения, который позволяет изображениям 263FL, 263FR, 263BL и 263BR колес выглядеть так, как будто они излучают свет.
[0128] Другими словами, после вмешательства управления помощью при вождении (ATC или AEB), активированного в то время, когда автомобиль V движется по извилистой дороге, изображения 263FL, 263FR, 263BL и 263BR колес подвергаются отображению с излучением света для четырех колес (изображение 261IN для отображения во время вмешательства в управление отображается). Таким образом, в ситуации, в которой нагрузка при вождении является относительно небольшой до того, как автомобиль V начинает движение по извилистой дороге, водитель визуально распознает отображаемый контент, подвергнутый отображению с подсвечиванием четырех колес, и за счет этого может узнать то, что управление вмешивается. После этого, в ситуации, в которой нагрузка при вождении является относительно большой, например, во время операции поворота, выполняется отображение деформации и отображение с излучением света для фонового изображения, и, соответственно, у водителя появляется возможность легко выяснять изменение отображаемого контента посредством мгновенного перемещения линии взгляда и посредством периферийного поля зрения без долгого рассматривания отображаемого контента. Следовательно, у водителя появляется возможность более легко распознавать то, что управление помощью при вождении работает, без долгого рассматривания отображаемого контента.
[0129] (7) При определении того, что активируется управление помощью при вождении (SMB), которое активируется в то время, когда автомобиль V движется на прямой дороге, и предназначено для того, чтобы повышать устойчивость при движении относительно угла рулевого управления, контроллер 30 отображения изменяет форму фонового изображения (изображения 261a сетки) изображения для отображения режима помощи, которое должно отображаться на жидкокристаллическом устройстве 26 отображения, на изображение формы полутрубы (изображение сетки 261h), в котором подняты вверх оба края фонового изображения (изображения 261a сетки) в направлении, перпендикулярном дальнему и ближнему направлению, и образуются стенки, окружающие поперечные боковые поверхности изображения 261b транспортного средства. Контроллер 30 отображения разделяет фрагменты изображения для изображения сетки 261h, которые размещены в пределах предварительно установленных диапазонах расстояний от изображения 261b транспортного средства, на множество областей в направлении, перпендикулярном дальнему и ближнему направлению. Относительно множества раздельных областей (областей AL1-AL4 отображения эффекта с левой стороны, областей RL1-RL4 отображения эффекта с правой стороны), контроллер 30 отображения выполняет управление отображением для того, чтобы изменять их существующий цвет отображения на другие предварительно установленные цвета, последовательно от раздельных областей на ближней стороне к изображению 261b транспортного средства до раздельных областей на дальней стороне от него.
Другими словами, посредством отображения анимации посредством изменения цвета отображения, выполняется такое отображение визуализации, в котором стенки образуются пошагово с обеих сторон изображения транспортного средства. Таким образом, водитель может легко выяснять изменение отображаемого контента посредством периферийного поля зрения без долгого рассматривания отображаемого контента, и помимо этого, у водителя появляется возможность легко распознавать то, какой тип из видов управления помощью при вождении активируется.
[0130] (8) Контроллер 30 отображения выполняет управление отображением для того, чтобы изменять цвет отображения фрагмента фонового изображения в диапазоне расстояний, который предварительно установлен из изображения 261b транспортного средства, на предварительно установленный цвет отображения, вызывающий эффект отображения, который позволяет фрагменту фонового изображения выглядеть так, как будто он излучает свет.
Другими словами, фрагмент изображения в диапазоне расстояний, предварительно установленном из изображения транспортного средства в фоновом изображении, изменяется на цвет (например, цвет с высокой яркостью или высокой светлотой по сравнению с цветом другой области), вызывающий эффект отображения, который позволяет фрагменту изображения выглядеть так, как будто он излучает свет. Таким образом, водитель может легко выяснять изменение отображаемого контента посредством периферийного поля зрения без долгого рассматривания отображаемого контента, и, соответственно, у водителя появляется возможность легко выяснять то, что управление помощью при вождении работает.
[0131] (9) При определении того, что управление помощью при вождении 40 работает, контроллер 30 отображения выполняет управление отображением для того, чтобы отображать изображение для отображения режима помощи, которое представляет собой изображение для уведомления водителя в отношении того, что управление помощью при вождении работает, на жидкокристаллическом устройстве 26 отображения. Кроме того, контроллер 30 отображения выполняет управление отображением для того, чтобы отображать изображение для отображения режима помощи на жидкокристаллическом устройстве 26 отображения непрерывно, по меньшей мере, до тех пор, пока не истечет предварительно установленное минимальное время tmin отображения.
Здесь, время работы управления помощью при вождении является различным, и в зависимости от оперативной ситуации, управление помощью при вождении работает только в течение короткого времени. Если изображение для отображения режима помощи отображается только в течение короткого времени для такого управления помощью при вождении, которое работает в течение относительно короткого времени, то изображение для отображения режима помощи отображается на мгновение. Такое отображение становится отображением, из которого водитель не может распознавать его контент, причем отображение раздражает водителя.
Другими словами, минимальное время tmin отображения задается, например, во время, подходящей для предоставления возможности водителю распознавать отображаемый контент, и отображение изображения для отображения режима помощи выполняется непрерывно, по меньшей мере, до тех пор, пока не истечет минимальное время tmin отображения. Таким образом, у водителя появляется возможность распознавать то, какой тип из видов управления помощью при вождении активируется, без чувства раздражения.
[0132] (10) Контроллер 30 отображения выполняет управление отображением для того, чтобы непрерывно отображать изображение для отображения режима помощи, которое соответствует работающему управлению помощью при вождении, на жидкокристаллическом устройстве 26 отображения в то время, когда соответствующее управление помощью при вождении работает, и помимо этого, продолжать отображать изображение для отображения режима помощи, которое соответствует работающему управлению помощью при вождении, на жидкокристаллическом устройстве 26 отображения до тех пор, пока не истечет минимальное время tmin отображения, при определении того, что работающее управление помощью при вождении завершается до истечения предварительно установленного минимального времени tmin отображения.
Таким образом, у водителя появляется возможность распознавать то, какой тип из видов управления помощью при вождении активируется, без чувства раздражения.
[0133] (11) Минимальное время tmin отображения задается для каждого типа для видов управления помощью при вождении.
Минимальное время tmin отображения задается для каждого из видов управления помощью при вождении, в силу чего, например, относительно управления помощью при вождении с относительно большой нагрузкой при вождении, появляется возможность приспосабливать такой режим гибкого отображения, например, для улучшения видимости посредством продления времени отображения изображения для отображения режима помощи.
(12) Контроллер 30 отображения обнаруживает рабочий режим управления помощью при вождении, реализованного посредством автомобильного устройства 40 помощи при вождении. При определении того, что активируется управление помощью при вождении, контроллер 30 отображения выполняет управление отображением для того, чтобы отображать изображение для отображения режима помощи, которое представляет собой изображение для уведомления водителя в отношении того, что управление помощью при вождении активируется, на устройстве отображения. При определении того, что нагрузка при вождении во время определения того, что активируется управление помощью при вождении, является относительно большой, контроллер 30 отображения выполняет управление отображением для того, чтобы отображать такое изображение для отображения режима помощи во время высокой нагрузки со структурой, в которой первое изображение транспортного средства (изображение 261b транспортного средства и т.п.), просматриваемое с точки обзора при просмотре вниз на транспортное средство от верхней задней части, накладывается на фоновое изображение (например, изображение 261a сетки), и помимо этого, отображать фрагмент фонового изображения в предварительно установленном режиме отображения. При определении того, что нагрузка при вождении во время определения того, что активируется управление помощью при вождении, является относительно небольшой, контроллер 30 отображения выполняет управление отображением для того, чтобы отображать такое изображение для отображения режима помощи во время низкой нагрузки (изображение 261HSA или 261HDC визуализации), включающее в себя второе изображение транспортного средства (изображение 261f или 261h транспортного средства), полученное посредством просмотра боковой поверхности транспортного средства спереди на чертеже, и помимо этого, отображать фрагменты колес второго изображения транспортного средства в предварительно установленном режиме отображения.
[0134] Например, когда скорость транспортного средства автомобиля V является относительно высокой, автомобиль V выполняет операцию поворота, автомобиль V преодолевает неровности, которые обеспечивают большой ввод и т.д., возникают ситуации, когда нагрузка при вождении является относительно большой. В таких ситуациях, как описано выше, для водителя становится затруднительным долго рассматривать экран отображения жидкокристаллического устройства 26 отображения и распознавать подробный отображаемый контент на нем. Между тем, когда автомобиль V остановлен на пути подъема с крутым градиентом и начинает движение из такого остановленного состояния, автомобиль V движется на спуске с крутым градиентом, снежной дороге и т.п. на относительно низкой скорости транспортного средства и т.д., возникают ситуации, когда нагрузка при вождении является относительно небольшой. В таких ситуациях, как описано выше, для водителя становится относительно просто видеть экран 260 отображения жидкокристаллического устройства 26 отображения и распознавать отображаемый контент на нем.
[0135] Соответственно, в случае если нагрузка при вождении в то время, когда активируется управление помощью при вождении, является относительно большой, отображается изображение для отображения режима помощи во время высокой нагрузки, которое включает в себя первое изображение транспортного средства, просматриваемое с точки обзора при просмотре вниз на транспортное средство от верхней задней части, и имеет структуру, в которой первое изображение транспортного средства размещается в фоновом изображении (сетчатообразном плоском изображении). Помимо этого, фрагмент фонового изображения отображается в предварительно установленном режиме отображения, например, посредством выполнения отображения с излучением света для фрагмента фонового изображения на периферии первого изображения транспортного средства. Таким образом, у водителя появляется возможность распознавать то, что управление помощью при вождении работает, посредством мгновенного перемещения линии взгляда и посредством периферийного поля зрения без долгого рассматривания экрана 260 отображения жидкокристаллического устройства 26 отображения.
[0136] Между тем, в случае если нагрузка при вождении в то время, когда активируется управление помощью при вождении, является относительно небольшой, отображается изображение для отображения режима помощи во время низкой нагрузки, включающее в себя второе изображение транспортного средства, в котором сторона транспортного средства просматривается спереди на чертеже, и фрагменты изображений колес отображаются в предварительно установленном режиме отображения, например, посредством выполнения отображения с излучением света или отображения в форме мигания для фрагментов шин изображений колес во втором изображении транспортного средства. Таким образом, у водителя появляется возможность распознавать относительно подробную оперативную ситуацию управления помощью при вождении из отображаемого контента экрана 260 отображения жидкокристаллического устройства 26 отображения.
[0137] (13) Управление помощью при вождении включает в себя управление помощью при вождении на основе разности времен, которое активируется в режиме ожидания, когда устанавливается первое предварительно установленное условие (например, когда автомобиль V остановлен в состоянии, в котором водитель нажимает педаль 16 тормоза), и переключается в состояние выполнения управления, когда устанавливается предварительное установленное второе условие (когда водитель отпускает педаль тормоза 16) в режиме ожидания. При определении того, что такая нагрузка при вождении во время определения того, что управление помощью при вождении на основе разности времен (например, управление HSA помощью при вождении) активируется в режиме ожидания, является относительно небольшой, контроллер 30 отображения выполняет управление отображением для того, чтобы отображать такое изображение для отображения режима помощи во время низкой нагрузки, и помимо этого, отображать фрагменты колес второго изображения транспортного средства в изображении для отображения режима помощи во время низкой нагрузки посредством цвета отображения, вызывающего эффект отображения, который позволяет фрагментам шин выглядеть так, как будто они излучают свет (например, изображение 261HSA(S) визуализации подвергается отображению с подсвечиванием колес). При определении того, что такая нагрузка при вождении во время определения того, что управление помощью при вождении на основе разности времен переключается из режима ожидания в рабочий режим, является относительно небольшой, контроллер 30 отображения выполняет управление отображением для того, чтобы поочередно повторять отображение фрагментов колес второго изображения транспортного средства в изображении для отображения режима помощи во время низкой нагрузки посредством цвета отображения, вызывающего эффект отображения, который позволяет фрагментам колес выглядеть так, как будто они излучают свет, и отображение соответствующих фрагментов колес, посредством цвета отображения, вызывающего цвет отображения, который позволяет фрагментам колес выглядеть так, как будто они погашены (например, изображение 261HSA(0) визуализации подвергается отображению в форме мигания колес).
[0138] Таким образом, появляется возможность выполнять отображение информации с высокой видимостью для такого управления помощью при вождении, которое переходит в режим ожидания (состояние подготовки к активации), когда педаль 16 тормоза нажимается, и автомобиль V остановлен, и после этого переходит в рабочий режим посредством отпускания педали тормоза 16, например, такого как управление HSA помощью при вождении, которое активируется в ситуации, в которой нагрузка при вождении является относительно небольшой.
[0139] (14) Такое изображение для отображения режима помощи во время низкой нагрузки (изображение 261HSA или 261HDC визуализации), которое соответствует управлению помощью при вождении (видам HSA, HDC управления помощью при вождении и т.п.), активированному на уклоне, может иметь конфигурацию, которая включает в себя линию отображения уклона (линию 266 отображения подъема или линию 267 отображения спуска), которая представляет собой наклонную линию, указывающую уклон, под которым размещается второе изображение транспортного средства (изображение 261f или 261h транспортного средства) таким образом, что линия отображения уклона может задаваться в качестве плоскости земли фрагментов шин второго изображения транспортного средства.
Таким образом, у водителя появляется возможность легко распознавать то, что управление помощью при вождении, которое должно быть активным на уклоне, работает, посредством наблюдения экрана 260 отображения жидкокристаллического устройства 26 отображения.
[0140] Второй вариант осуществления
Далее приводится описание второго варианта осуществления настоящего изобретения на основе чертежей. Фиг. 18-20 являются видами, показывающими вариант осуществления устройства управления отображением для транспортного средства и способа управления отображением для транспортного средства согласно второму варианту осуществления настоящего изобретения.
Конфигурация
В вышеописанном первом варианте осуществления, приспосабливается такая конфигурация, в которой в случае, если другое управление помощью при вождении активируется в ходе работы определенного управления помощью при вождении, первое отображаемое изображение для отображения режима помощи сразу переключается на второе изображение для отображения режима помощи, соответствующее последующему активированному управлению помощью при вождении, и отображается второе изображение для отображения режима помощи. Напротив, в этом варианте осуществления, когда определяется то, что время отображения ранее отображаемого первого изображения для отображения режима помощи не истекло в течение более чем предварительно установленного времени отображения переключения, отображение первого изображения для отображения режима помощи отображается непрерывно до тех пор, пока не истечет время отображения переключения. Второй вариант осуществления отличается от вышеописанного первого варианта осуществления тем, что после этого отображается второе изображение для отображения режима помощи.
Следует отметить, что идентичные ссылки с номерами назначаются конфигурациям, аналогичным конфигурациям вышеописанного первого варианта осуществления, и их дублированное описание опускается.
[0141] Фиг. 18 является блок-схемой, показывающей конфигурацию контроллера 30 отображения этого варианта осуществления.
Как показано на фиг. 18, контроллер 30 отображения этого варианта осуществления включает в себя: ECU 300 для управления отображением; запоминающее устройство 302 информации визуализации; таймер 304 для измерения времени отображения; и запоминающее устройство 306 порядка работы.
Запоминающее устройство 306 порядка работы представляет собой запоминающее устройство, которое сохраняет порядок работы видов управления помощью при вождении.
ECU 300 для управления отображением имеет конфигурацию, включающую в себя процессор 300A ввода и модуль 300B управления отображением. Кроме того, в этом варианте осуществления, модуль 300B управления отображением имеет конфигурацию, включающую в себя процессор 300C управления задержкой времени отображения, процессор 300D выходных сигналов и модуль 300E определения порядка.
[0142] При определении того, что управление помощью при вождении работает на основе введенного флага рабочего режима, процессор 300C управления задержкой времени отображения считывает информацию минимального времени отображения, которая соответствует управлению помощью при вождении, определенному как работающему, из запоминающего устройства 302 информации визуализации. После этого процессор 300C управления задержкой времени отображения вводит информацию минимального времени отображения в процессор 300D выходных сигналов и вводит введенный флаг рабочего режима в модуль 300E определения порядка.
Модуль 300E определения порядка сохраняет порядок работы видов управления помощью при вождении в запоминающем устройстве 306 порядка работы на основе флага рабочего режима, введенного из процессора 300C управления задержкой времени отображения. Затем, на основе сохраненного порядка работы, модуль 300E определения порядка определяет порядок отображения изображений для отображения режима помощи, соответствующих соответствующим видам управления помощью при вождении.
В этом варианте осуществления, в случае если только одно управление помощью при вождении работает, и в случае, если ни один из видов управления помощью при вождении не работает, модуль 300E определения порядка вводит информацию, которая указывает проблемы этих случаев, в процессор 300D выходных сигналов.
[0143] Кроме того, в случае если два типа или более для видов управления помощью при вождении активируются непрерывно перекрывающимся способом, модуль 300E определения порядка задает порядок работы, который сохраняется в запоминающем устройстве 306 порядка работы, в качестве порядка отображения и вводит информацию относительно порядка отображения в процессор 300D выходных сигналов.
Кроме того, в случае если два типа или более для видов управления помощью при вождении активируются одновременно, модуль 300E определения порядка определяет порядок отображения в ответ на рабочие условия видов управления помощью при вождении. Модуль 300E определения порядка вводит информацию относительно решенного порядка отображения в процессор 300D выходных сигналов.
[0144] Здесь, например, рабочие условия видов управления помощью при вождении включают в себя: рабочие условия, установленные в ответ на то, что водитель управляет управляющим устройством для вождения, таким как рулевое колесо 1; рабочие условия, установленные в ответ на ввод возмущений; и т.п. В этом варианте осуществления, в качестве такого управления помощью при вождении, в котором рабочие условия устанавливаются в ответ на операцию управляющего устройства для вождения, например, являются применимыми виды ATC и AEB управления помощью при вождении, которые активируются в ответ на операцию рулевого колеса 1. Между тем, в этом варианте осуществления, в качестве такого управления помощью при вождении, в котором рабочие условия устанавливаются в ответ на ввод возмущений, например, является применимым управление ARC помощью при вождении, которое активируется в ответ на преодолевание (ввода) неровностей (возмущений) поверхности дороги и т.п.
[0145] В этом варианте осуществления, в случае если такое управление помощью при вождении согласно операции в качестве управления помощью при вождении, в которое управление вмешивается в ответ на операцию управляющего устройства для вождения водителем, и управление помощью при вождении согласно возмущениям в качестве управления помощью при вождении, в которое управление вмешивается в ответ на ввод возмущений, активируются одновременно, в таком случае приоритет отдается управлению помощью при вождении согласно операции. Другими словами, модуль 300E определения порядка определяет порядок отображения изображения для отображения режима помощи, которое соответствует управлению помощью при вождении согласно операции, как предыдущий порядок относительно порядка отображения изображения для отображения режима помощи, которое соответствует управлению помощью при вождении согласно возмущениям.
[0146] Затем, в случае если два типа или более для видов управления помощью при вождении активируются непрерывно перекрывающимся способом, процессор 300D выходных сигналов этого варианта осуществления выполняет управление отображением на основе времени tsw отображения переключения, предварительно установленного для каждого типа для видов управления помощью при вождении. В этом варианте осуществления, время tsw отображения переключения задается равным времени, меньшим минимального времени tmin отображения, описанного в вышеописанном первом варианте осуществления. Например, в случае если минимальное время tmin отображения задается равным 2,5 [с], время tsw отображения переключения задается равным, например, 2,0 [с] и т.п. Другими словами, в то время, когда минимальное время tmin отображения является временем для улучшения распознаваемости водителя для отображаемого контента, это время tsw отображения переключения является временем для разрешения такого раздражения, которое вызывается у водителя, посредством переключения отображения за короткое время. В частности, в вышеописанном первом варианте осуществления, изображение для отображения режима помощи, которое соответствует управлению помощью при вождении, которое впоследствии начинает активироваться, отображается после немедленного переключения с ранее отображаемого изображения для отображения режима помощи. В это время, в случае если время отображения ранее отображаемого изображения для отображения режима помощи является чрезвычайно коротким, предыдущее изображение для отображения режима помощи отображается в данный момент, и после этого отображается последующее изображение для отображения режима помощи. Следовательно, водитель не может распознавать то, что отображается, и чувствует раздражение.
[0147] В этом варианте осуществления, посредством таймера 304 для измерения времени отображения, процессор 300D выходных сигналов измеряет время отображения изображения для отображения режима помощи (в дальнейшем в этом документе называется "первым изображением для отображения режима помощи"), которое соответствует управлению помощью при вождении (в дальнейшем называется "первым управлением помощью при вождении), которое ранее начинает активироваться. На основе времени отображения, измеряемого таким способом, процессор 300D выходных сигналов определяет то, истекает или нет время отображения первого изображения для отображения режима помощи в течение более чем времени tsw отображения переключения (в дальнейшем в этом документе называется "первым временем tsw1 отображения переключения"), предварительно установленного для первого управления помощью при вождении. В случае определения того, что время отображения переключения tsw1 не истекло, посредством такого определения, процессор 300D выходных сигналов выполняет управление отображением для того, чтобы отображать изображение для отображения режима помощи непрерывно до тех пор, пока не истечет первое время tsw1 отображения переключения.
[0148] Затем, процессор 300D выходных сигналов выполняет управление отображением для того, чтобы отображать изображение для отображения режима помощи (в дальнейшем в этом документе называется "вторым изображением для отображения режима помощи"), которое соответствует управлению помощью при вождении (в дальнейшем в этом документе называется вторым управлением помощью при вождении"), которое впоследствии начинает активироваться, на жидкокристаллическом устройстве 26 отображения. Также в это время, процессор 300D выходных сигналов измеряет время отображения посредством таймера 304 для измерения времени отображения. Затем на основе времени, измеряемого таким способом, процессор 300D выходных сигналов этого варианта осуществления выполняет управление отображением для того, чтобы отображать второе изображение для отображения режима помощи, по меньшей мере, до тех пор, пока не истечет время tsw отображения переключения (в дальнейшем в этом документе называется "вторым временем tsw2 отображения переключения"), предварительно установленное для второго управления помощью при вождении.
[0149] Ниже приводится описание управления отображением для второго изображения для отображения режима помощи.
Во-первых, приводится описание случая, в котором время работы второго управления помощью при вождении составляет минимальное время tmin отображения или меньше. В этом случае, дополнительно предполагается, что, относительно времени от момента, когда активируется второе управление помощью при вождении, до тех пор, пока не истечет минимальное время tmin отображения, время (в дальнейшем в этом документе называется "вторым временем tsh2 отображения") от момента, когда активируется второе управление помощью при вождении, до тех пор, пока не истечет минимальное время tmin отображения, не меньше второго минимального времени tsw2 отображения. В этом случае, процессор 300D выходных сигналов выполняет управление отображением для того, чтобы отображать второе изображение для отображения режима помощи непрерывно до тех пор, пока не истечет второе время tsw2 отображения переключения.
Между тем, в случае если второе время tsh2 отображения является временем, равным или превышающим второе время tsw2 отображения переключения, то в этом варианте осуществления, процессор 300D выходных сигналов выполняет управление отображением для того, чтобы отображать второе изображение для отображения режима помощи до тех пор, пока не истечет второе время tsh2 отображения.
[0150] Далее приводится описание случая, в котором время работы второго управления помощью при вождении становится большим минимального времени tmin отображения, и время отображения второго изображения для отображения режима помощи становится большим второго времени tsw2 отображения переключения. Также в этом варианте осуществления, аналогично вышеописанному первому варианту осуществления, управление отображением для того, чтобы непрерывно отображать изображение для отображения режима помощи, соответствующее управлению помощью при вождении, которое работает, выполняется в ходе работы управления помощью при вождении. Следовательно, процессор 300D выходных сигналов выполняет управление отображением для того, чтобы отображать второе изображение для отображения режима помощи непрерывно до тех пор, пока не завершится второе управление помощью при вождении.
Следует отметить, что конфигурация здесь не ограничена конфигурацией отображения второго изображения для отображения режима помощи, по меньшей мере, для второго времени tsw2 отображения переключения или более, и может приспосабливаться конфигурация, в которой, по меньшей мере, второе изображение для отображения режима помощи отображается, и после этого непрерывно отображается до тех пор, пока не истечет минимальное время отображения, предварительно установленное для второго управления помощью при вождении.
[0151] Кроме того, время tsw отображения переключения задается аналогично также для изображения по умолчанию. Например, предполагается, что другое управление помощью при вождении активируется до того, как истекает время tsw отображения переключения, предварительно установленное для изображения по умолчанию, после того, как отображение возвращается к изображению по умолчанию после завершения определенного управления помощью при вождении. В этом случае, процессор 300D выходных сигналов отображает изображение по умолчанию непрерывно до тех пор, пока не истечет время tsw отображения переключения, предварительно установленное для изображения по умолчанию.
Кроме того, в этом варианте осуществления, информация относительно времени отображения переключения включена в информацию шаблона отображения, сохраненную в запоминающем устройстве 302 информации визуализации.
[0152] Между тем, в случае если управление помощью при вождении согласно операции и управление помощью при вождении согласно возмущениям активируются одновременно, процессор 300D выходных сигналов выполняет управление отображением на основе порядка отображения, введенного из модуля определения порядка.
В этом варианте осуществления, порядок отображения определяется таким образом, что приоритет может отдаваться управлению помощью при вождении согласно операции, и, соответственно, процессор 300D выходных сигналов заранее выполняет управление отображением для изображения для отображения режима помощи (в дальнейшем в этом документе называется "изображением для отображения согласно операции"), соответствующее управлению помощью при вождении согласно операции. В частности, сначала процессор 300D выходных сигналов выполняет управление отображением для того, чтобы отображать изображение для отображения согласно операции, до тех пор, пока не истечет минимальное время отображения, предварительно установленное для управления помощью при вождении согласно операции. После этого, процессор 300D выходных сигналов реализует управление отображением для изображения для отображения режима помощи (в дальнейшем в этом документе называется "изображением для отображения согласно возмущениям"), соответствующее управлению помощью при вождении согласно возмущениям. В частности, в этом варианте осуществления, процессор 300D выходных сигналов выполняет управление отображением для того, чтобы отображать изображение для отображения согласно возмущениям, до тех пор, пока не истечет минимальное время отображения, предварительно установленное для управления помощью при вождении согласно возмущениям.
[0153] Работа
Ниже приводится описание примеров работы этого варианта осуществления на основе фиг. 19 и фиг. 20.
Операция управления отображением во время непрерывной работы
На основе фиг. 19, приводится описание случая, в котором виды управления помощью при вождении активируются непрерывно перекрывающимся способом. Фиг. 19 является временной диаграммой для пояснения примера операции управления отображением в случае, если виды управления помощью при вождении активируются непрерывно перекрывающимся способом.
Во-первых, как показано в (1) на фиг. 19, когда флаг рабочего режима управления A помощью при вождении переходит в активированное состояние, процессор 300C управления задержкой времени отображения считывает минимальное время tminA отображения, которое соответствует управлению A помощью при вождении, в качестве информации минимального времени отображения из запоминающего устройства 302 информации визуализации. Следует отметить, что в этом варианте осуществления, управление A помощью при вождении представляет собой любое управление из видов ATC, AEB, ARC, SMB и HDC управления помощью при вождении.
[0154] Процессор 300C управления задержкой времени отображения вводит считываемое минимальное время tminA отображения в процессор 300D выходных сигналов. Кроме того, процессор 300C управления задержкой времени отображения вводит введенный флаг рабочего режима в модуль 300E определения порядка.
Модуль 300E определения порядка сохраняет порядок работы видов управления помощью при вождении в запоминающем устройстве 306 порядка работы на основе введенного флага рабочего режима. Как показано в (1) на фиг. 19, управление A помощью при вождении сначала активируется, и, соответственно, модуль 300E определения порядка сохраняет информацию относительно порядка работы (первого порядка) управления A помощью при вождении в запоминающем устройстве 306 порядка работы. Затем модуль 300E определения порядка вводит информацию порядка отображения, которая указывает то, что управление A помощью при вождении работает, в процессор 300D выходных сигналов.
[0155] При определении того, что управление A помощью при вождении переходит в рабочий режим, на основе информации относительно порядка отображения, которая вводится из модуля 300E определения порядка, процессор 300D выходных сигналов считывает информацию A шаблона отображения, которая соответствует управлению A помощью при вождении, из запоминающего устройства 302 информации визуализации. Затем на основе считываемой информации A шаблона отображения процессор 300D выходных сигналов формирует инструкцию A по началу отображения для изображения X для отображения режима помощи (в дальнейшем в этом документе называется " изображением визуализации A"), соответствующую управлению A помощью при вождении. Кроме того, процессор 300D выходных сигналов передает сформированную инструкцию A по началу отображения в измерительное устройство 20 через сеть 50 связи. Между тем, процессор 300D выходных сигналов выводит инструкцию по началу для операции подсчета в таймер 304 для измерения времени отображения и начинает операцию подсчета (измерение времени отображения) посредством таймера 304 для измерения времени отображения.
[0156] Между тем, при приеме инструкции A по началу отображения из процессора 300D выходных сигналов, контроллер 28 измерительных приборов измерительного устройства 20 считывает информацию относительно изображения визуализации A, которое соответствует принимаемой инструкции A по началу отображения, из запоминающего устройства 29 изображений визуализации. Кроме того, контроллер 28 измерительных приборов получает разнообразную информацию, которая должна отображаться в первой области 260А отображения, второй области 260B отображения и четвертой области 260D отображения, через сеть 50 связи из других контроллеров, измерительных приборов и т.п. Затем контроллер 28 измерительных приборов формирует сигнал A отображения изображений для изображения, которое должно отображаться на экране 260 отображения, на основе считываемой информации относительно изображения визуализации A и полученного множества информации и вводит сформированный сигнал A отображения изображений в жидкокристаллическое устройство 26 отображения.
[0157] Как показано в (2) на фиг. 19, жидкокристаллическое устройство 26 отображения отображает изображение визуализации A на экране 260 отображения на основе сигнала A отображения изображений, введенного в него.
Затем, как показано в (3) на фиг. 19, когда флаг B рабочего режима управления B помощью при вождении переходит в активированное состояние в ходе работы управления A помощью при вождении, процессор 300C управления задержкой времени отображения считывает минимальное время tminB отображения, которое соответствует управлению B помощью при вождении, в качестве информации минимального времени отображения из запоминающего устройства 302 информации визуализации. После этого процессор 300C управления задержкой времени отображения вводит считываемое минимальное время tminB отображения в процессор 300D выходных сигналов. Кроме того, процессор 300C управления задержкой времени отображения вводит введенный флаг рабочего режима в модуль 300E определения порядка.
[0158] Модуль 300E определения порядка сохраняет информацию относительно порядка работы (второго порядка) управления B помощью при вождении в запоминающем устройстве 306 порядка работы на основе введенного флага рабочего режима. Затем на основе сохраненной информации относительно порядков работы, модуль 300E определения порядка вводит информацию порядка отображения, которая указывает то, что управление A помощью при вождении является первым, и что управление B помощью при вождении является вторым, в процессор 300D выходных сигналов.
При определении того, что управление B помощью при вождении переходит в рабочий режим в ходе работы управления A помощью при вождении, на основе информации относительно порядка отображения, которая вводится из модуля 300E определения порядка, процессор 300D выходных сигналов считывает информацию B шаблона отображения, которая соответствует управлению B помощью при вождении, из запоминающего устройства 302 информации визуализации.
[0159] Между тем, на основе подсчитанного значения таймера 304 для измерения времени отображения, процессор 300D выходных сигналов определяет то, истекает или нет время отображения управления A помощью при вождении в течение более чем времени tswA отображения переключения, предварительно установленного для управления A помощью при вождении. Как показано в (2) и (3) на фиг. 19, в момент времени, когда активируется управление B помощью при вождении, время отображения (tshA на фиг. 19) изображения визуализации A меньше времени tswA отображения переключения. Следовательно, процессор 300D выходных сигналов выполняет управление отображением для того, чтобы отображать изображение визуализации A непрерывно до тех пор, пока не истечет время отображения изображения визуализации А в течение более чем времени tswA отображения переключения. Другими словами, при определении того, что время отображения изображения визуализации A истекает в течение более чем времени tswA отображения переключения, процессор 300D выходных сигналов формирует инструкцию B по переключению отображения для изображения B для отображения режима помощи (в дальнейшем в этом документе называется " изображением визуализации B"), которая соответствует управлению B помощью при вождении, на основе информации B шаблона отображения. После этого процессор 300D выходных сигналов передает сформированную инструкцию B по переключению отображения в измерительное устройство 20 через сеть 50 связи. Между тем, процессор 300D выходных сигналов выводит инструкцию сброса в таймер 304 для измерения времени отображения и сбрасывает подсчитанное значение, помимо этого, далее выводит инструкцию по началу для операции подсчета в таймер 304 для измерения времени отображения и начинает операцию подсчета посредством таймера 304 для измерения времени отображения.
[0160] При приеме инструкции B по переключению отображения из процессора 300D выходных сигналов, контроллер 28 измерительных приборов измерительного устройства 20 считывает информацию относительно изображения визуализации B, которое соответствует принимаемой инструкции B по переключению отображения, из запоминающего устройства 29 изображений визуализации. Кроме того, контроллер 28 измерительных приборов получает разнообразную информацию, которая должна отображаться в первой области 260А отображения, второй области 260B отображения и четвертой области 260D отображения, через сеть 50 связи из других контроллеров, измерительных приборов и т.п. Затем контроллер 28 измерительных приборов формирует сигнал B отображения изображений для изображения, которое должно отображаться на экране 260 отображения, на основе считываемой информации относительно изображения визуализации B и полученного множества информации и вводит сформированный сигнал B отображения изображений в жидкокристаллическое устройство 26 отображения.
[0161] Как показано в (4) на фиг. 19, жидкокристаллическое устройство 26 отображения отображает изображение визуализации B на экране 260 отображения вместо изображения визуализации A на основе сигнала B отображения изображений, введенного в него.
В примере для (1)-(4) на фиг. 19, время, когда истекает минимальное время tminA отображения со времени t1 начала работы управления B помощью при вождении, представляет собой время t3. Затем время со времени t2 начала отображения изображения визуализации B до времени t3, т.е. время tshB отображения изображения визуализации B, равно или превышает время tswB отображения переключения, предварительно установленное для управления B помощью при вождении.
Следовательно, процессор 300D выходных сигналов выполняет управление отображением для того, чтобы отображать изображение визуализации B до тех пор, пока не истечет время tshB отображения. Другими словами, при определении того, что время отображения изображения визуализации B истекает в течение более чем времени tshB отображения, процессор 300D выходных сигналов формирует инструкцию по окончанию отображения для изображения визуализации B. После этого процессор 300D выходных сигналов передает сформированную инструкцию по окончанию отображения в измерительное устройство 20через сеть 50 связи.
[0162] При приеме инструкции по окончанию отображения из процессора 300D выходных сигналов, контроллер 28 измерительных приборов измерительного устройства 20 считывает информацию относительно изображения 261DF по умолчанию из запоминающего устройства 29 изображений визуализации. Кроме того, контроллер 28 измерительных приборов получает разнообразную информацию, которая должна отображаться в вышеописанной первой области 260А отображения, второй области 260B отображения и четвертой области 260D отображения, через сеть 50 связи из других контроллеров, измерительных приборов и т.п. Затем контроллер 28 измерительных приборов формирует сигнал DF отображения изображений для изображения, которое должно отображаться на экране 260 отображения, на основе считываемой информации относительно изображения 261DF по умолчанию и полученного множества информации и вводит сформированный сигнал DF отображения изображений в жидкокристаллическое устройство 26 отображения.
Жидкокристаллическое устройство 26 отображения отображает изображение 261DF по умолчанию на экране 260 отображения вместо изображения визуализации B на основе сигнала DF отображения изображений, введенного в него.
[0163] Далее приводится описание примера работы, показанного в (5)-(8) на фиг. 19. Отличие (5)-(8) на фиг. 19 от (1)-(4) на фиг. 19 заключается в том, что начальное время управления B помощью при вождении является заблаговременным. Следовательно, относительно времени t6 в момент времени, когда истекает минимальное время tminB отображения со времени t4 активации управления B помощью при вождении, такое время (время tshB отображения) со времени t5 начала отображения изображения визуализации B во время t6 меньше времени tswB отображения переключения.
В таком случае, процессор 300D выходных сигналов выполняет управление отображением для того, чтобы отображать изображение визуализации B непрерывно до тех пор, пока не истечет время tswB отображения переключения со времени t5 начала отображения, т.е. со времени t5 до времени t1.
[0164] Операция управления отображением во время работы нескольких видов управления
Далее, на основе фиг. 20, приводится описание случая, в котором управление помощью при вождении согласно операции и управление помощью при вождении согласно возмущениям активируются одновременно. Фиг. 20 является временной диаграммой для пояснения примера операции управления отображением в случае, если управление помощью при вождении согласно операции и управление помощью при вождении согласно возмущениям активируются одновременно.
Следует отметить, что в дальнейшем в этом документе, флаг рабочего режима управления помощью при вождении согласно операции упоминается в качестве флага рабочего режима согласно операции, и флаг рабочего режима управления помощью при вождении согласно возмущениям упоминается в качестве флага рабочего режима согласно возмущениям.
[0165] Как показано в (1) и (2) на фиг. 20, предполагается, что флаг C рабочего режима согласно операции и флаг D рабочего режима согласно возмущениям переходят в активированное состояние одновременно. В этом случае, процессор 300C управления задержкой времени отображения считывает минимальное время tminC отображения, которое соответствует управлению C помощью при вождении согласно операции, в качестве информации минимального времени отображения из запоминающего устройства 302 информации визуализации. Кроме того, процессор 300C управления задержкой времени отображения считывает минимальное время tminD отображения, которое соответствует управлению D помощью при вождении согласно возмущениям, в качестве информации минимального времени отображения из запоминающего устройства 302 информации визуализации. Следует отметить, что в этом варианте осуществления, управление C помощью при вождении согласно операции представляет собой любое управление из видов ATC и AEB управления помощью при вождении. Кроме того, в этом варианте осуществления, управление D помощью при вождении согласно возмущениям представляет собой управление ARC помощью при вождении.
[0166] Процессор 300C управления задержкой времени отображения вводит считываемое минимальное время tminC отображения и минимальное время tminD отображения в процессор 300D выходных сигналов. Кроме того, процессор 300C управления задержкой времени отображения вводит введенные флаги рабочих режимов в модуль 300E определения порядка.
Модуль 300E определения порядка сохраняет порядок работы видов управления помощью при вождении в запоминающем устройстве 306 порядка работы на основе введенных флагов рабочих режимов. В этом случае, управление помощью при вождении согласно операции и управление помощью при вождении согласно возмущениям активируются одновременно, модуль 300E определения порядка сохраняет информацию порядка работы, которая указывает то, что управление C помощью при вождении согласно операции и управление D помощью при вождении согласно возмущениям активируются одновременно, в запоминающем устройстве 306 порядка работы. Кроме того, на основе сохраненной информации порядка работы, модуль 300E определения порядка формирует информацию порядка отображения, в которой управление C помощью при вождении согласно операции задается равным первому порядку, а управление D помощью при вождении согласно возмущениям задается равным второму порядку, и вводит сформированную информацию порядка отображения в процессор 300D выходных сигналов.
[0167] На основе информации относительно порядка отображения, которая вводится из модуля 300E определения порядка, процессор 300D выходных сигналов считывает информацию C шаблона отображения, которая соответствует управлению C помощью при вождении согласно операции, из запоминающего устройства 302 информации визуализации. Затем на основе считываемой информации C шаблона отображения процессор 300D выходных сигналов формирует инструкцию C по началу отображения для изображения C для отображения режима помощи (в дальнейшем в этом документе называется "изображением визуализации C"), соответствующую управлению C помощью при вождении согласно операции. Кроме того, процессор 300D выходных сигналов передает сформированную инструкцию C по началу отображения в измерительное устройство 20через сеть 50 связи. Между тем, процессор 300D выходных сигналов выводит инструкцию по началу для операции подсчета в таймер 304 для измерения времени отображения и начинает операцию подсчета посредством таймера 304 для измерения времени отображения.
[0168] Между тем, при приеме инструкции C по началу отображения из процессора 300D выходных сигналов, контроллер 28 измерительных приборов измерительного устройства 20 считывает информацию относительно изображения визуализации C, которое соответствует принимаемой инструкции C по началу отображения, из запоминающего устройства 29 изображений визуализации. Кроме того, контроллер 28 измерительных приборов получает разнообразную информацию, которая должна отображаться в первой области 260А отображения, второй области 260B отображения и четвертой области 260D отображения, через сеть 50 связи из других контроллеров, измерительных приборов и т.п. Затем контроллер 28 измерительных приборов формирует сигнал C отображения изображений для изображения, которое должно отображаться на экране 260 отображения, на основе считываемой информации относительно изображения визуализации C и полученного множества информации и вводит сформированный сигнал C отображения изображений в жидкокристаллическое устройство 26 отображения.
[0169] Как показано в (3) на фиг. 20, жидкокристаллическое устройство 26 отображения отображает изображение визуализации C на экране 260 отображения на основе сигнала C отображения изображений, введенного в него. В примере по фиг. 20, время toC работы управления C помощью при вождении согласно операции меньше минимального времени tminC отображения, и, соответственно, даже после того, как управление C помощью при вождении согласно операции завершается, процессор 300D выходных сигналов выполняет управление отображением для того, чтобы отображать изображение визуализации C непрерывно до тех пор, пока не истечет минимальное время tminC отображения.
[0170] В частности, при определении того, что время отображения изображения визуализации C истекает в течение более чем минимального времени tminC отображения, процессор 300D выходных сигналов считывает информацию D шаблона отображения, которая соответствует управлению D помощью при вождении согласно возмущениям, из запоминающего устройства 302 информации визуализации. Затем на основе считываемой информации D шаблона отображения процессор 300D выходных сигналов формирует инструкцию D по переключению отображения для изображения D для отображения режима помощи (в дальнейшем в этом документе называется " изображением визуализации D"), соответствующую управлению D помощью при вождении согласно возмущениям. После этого процессор 300D выходных сигналов передает сформированную инструкцию D по переключению отображения в измерительное устройство 20через сеть 50 связи. Между тем, процессор 300D выходных сигналов выводит инструкцию сброса в таймер 304 для измерения времени отображения и сбрасывает подсчитанное значение, помимо этого, далее выводит инструкцию по началу для операции подсчета в таймер 304 для измерения времени отображения и начинает операцию подсчета посредством таймера 304 для измерения времени отображения.
[0171] При приеме инструкции D по переключению отображения из процессора 300D выходных сигналов, контроллер 28 измерительных приборов измерительного устройства 20 считывает информацию относительно изображения визуализации D, которое соответствует принимаемой инструкции D по переключению отображения, из запоминающего устройства 29 изображений визуализации. Кроме того, контроллер 28 измерительных приборов получает разнообразную информацию, которая должна отображаться в первой области 260А отображения, второй области 260B отображения и четвертой области 260D отображения, через сеть 50 связи из других контроллеров, измерительных приборов и т.п. Затем контроллер 28 измерительных приборов формирует сигнал D отображения изображений для изображения, которое должно отображаться на экране 260 отображения, на основе считываемой информации относительно изображения визуализации D и полученного множества информации и вводит сформированный сигнал D отображения изображений в жидкокристаллическое устройство 26 отображения.
[0172] Как показано в (4) на фиг. 20, жидкокристаллическое устройство 26 отображения отображает изображение визуализации D на экране 260 отображения вместо изображения визуализации C на основе сигнала D отображения изображений, введенного в него.
В примере по фиг. 20, время toD работы управления D помощью при вождении согласно возмущениям меньше минимального времени tminD отображения, и, соответственно, даже после того, как управление D помощью при вождении согласно возмущениям завершается, процессор 300D выходных сигналов выполняет управление отображением для того, чтобы отображать изображение визуализации D непрерывно до тех пор, пока не истечет минимальное время tminD отображения.
[0173] В частности, при определении того, что время отображения изображения визуализации D истекает в течение более чем минимального времени tminD отображения, процессор 300D выходных сигналов формирует инструкцию по окончанию отображения для изображения визуализации D. После этого процессор 300D выходных сигналов передает сформированную инструкцию по окончанию отображения в измерительное устройство 20через сеть 50 связи.
При приеме инструкции по окончанию отображения из процессора 300D выходных сигналов, контроллер 28 измерительных приборов измерительного устройства 20 считывает информацию относительно изображения 261DF по умолчанию из запоминающего устройства 29 изображений визуализации. Кроме того, контроллер 28 измерительных приборов получает разнообразную информацию, которая должна отображаться в вышеописанной первой области 260А отображения, второй области 260B отображения и четвертой области 260D отображения, через сеть 50 связи из других контроллеров, измерительных приборов и т.п. Затем контроллер 28 измерительных приборов формирует сигнал DF отображения изображений для изображения, которое должно отображаться на экране 260 отображения, на основе считываемой информации относительно изображения 261DF по умолчанию и полученного множества информации и вводит сформированный сигнал DF отображения изображений в жидкокристаллическое устройство 26 отображения.
[0174] Жидкокристаллическое устройство 26 отображения отображает изображение 261DF по умолчанию на экране 260 отображения вместо изображения визуализации D на основе сигнала DF отображения изображений, введенного в него.
Здесь, в этом варианте осуществления, функция контроллера 30 отображения, которая заключается в том, чтобы определять рабочий режим управления помощью при вождении на основе флага рабочего режима, соответствует модулю определения рабочего режима. Функция в контроллере 30 отображения, которая заключается в том, чтобы выполнять управление отображением для изображения для отображения режима помощи, соответствует модулю управления отображением. Функция в процессоре 300A ввода, которая заключается в том, чтобы обнаруживать направление рулевого управления, соответствует модулю обнаружения угла рулевого управления.
[0175] Кроме того, в этом варианте осуществления, изображения 261a, 261e и 261h сетки, области AL1-AL4 отображения эффекта с левой стороны, области AR1-AR4 отображения эффекта с правой стороны и область 265 отображения эффекта соответствуют фоновому изображению. Помимо этого, изображение 261c сетки с изгибом влево (включающее в себя области 264LL и 264RL отображения эффектов) и изображение 261d сетки с изгибом вправо (включающее в себя области 264LR и 264RR отображения эффектов) соответствуют фоновому изображению.
[0176] Преимущества второго варианта осуществления
В соответствии с этим вариантом осуществления, появляется возможность обеспечивать преимущества, которые описываются ниже, в дополнение к преимуществам вышеописанного первого варианта осуществления. (1) При определении того, что управление помощью при вождении, реализованное посредством автомобильного устройства 40 помощи при вождении, работает, контроллер 30 отображения отображает изображение для отображения режима помощи, которое представляет собой изображение для уведомления водителя в отношении того, что управление помощью при вождении работает, на жидкокристаллическом устройстве 26 отображения, предоставленном на приборной панели 21 измерительного устройства 20. При определении того, что второе управление помощью при вождении, отличающееся от первого управления помощью при вождении, активируется в то время, когда первое управление помощью при вождении работает, и при определении того, что время отображения ранее отображаемого первого изображения для отображения режима помощи, соответствующего первому управлению помощью при вождении, не истекло в течение более чем предварительно установленного времени tsw отображения переключения, контроллер 30 отображения выполняет управление отображением для того, чтобы отображать первое изображение для отображения режима помощи непрерывно до тех пор, пока не истечет время tsw отображения переключения, и после выполнения соответствующего управления отображением, не выполняет управление отображением для того, чтобы отображать второе изображение для отображения режима помощи, соответствующее второму управлению помощью при вождении.
[0177] Другими словами, когда определяется то, что второе управление помощью при вождении активируется в то время, когда первое управление помощью при вождении работает, определяется то, истекает или нет время отображения ранее отображаемого первого изображения для отображения режима помощи в течение более чем времени tsw отображения переключения. Затем в случае, если время отображения ранее отображаемого первого изображения для отображения режима помощи не истекло в течение более чем времени tsw отображения переключения, управление отображением для того, чтобы отображать второе изображение для отображения режима помощи после немедленного переключения на него, не выполняется, но первое изображение для отображения режима помощи отображается непрерывно до тех пор, пока не истечет время tsw отображения переключения.
Таким образом, даже в таком случае, если второе управление помощью при вождении активируется во время, когда первое изображение для отображения режима помощи отображается в течение чрезвычайно короткого времени, первое изображение для отображения режима помощи отображается бесперебойно до тех пор, пока не истечет время tsw отображения переключения. Следовательно, время tsw отображения переключения задается равным подходящему времени, в силу чего появляется возможность предотвращать возникновение такого состояния отображения в течение чрезвычайно короткого времени изображения для отображения режима помощи, и появляется возможность уменьшать раздражение, вызываемое у водителя посредством такого отображения.
[0178] (2) При определении того, что управление помощью при вождении согласно операции (например, управление ATC, AEB помощью при вождении и т.п.), которое активируется в ответ на операцию управляющего устройства для вождения (педали 16 тормоза рулевого колеса 1, педали акселератора и т.п.) водителем, и управление помощью при вождении согласно возмущениям (например, управление ARC помощью при вождении и т.п.), которое активируется в ответ на возмущения, активируются одновременно, контроллер 30 отображения отображает изображение для отображения режима помощи (изображение 261IN, 261LC, 261RC визуализации и т.п.), которое соответствует управлению помощью при вождении согласно операции, при присвоении ему более высокого приоритета по сравнению с управлением помощью при вождении согласно возмущениям. Затем после соответствующего отображения контроллер 30 отображения выполняет управление отображением для того, чтобы отображать изображение для отображения режима помощи (изображение 261ARC визуализации и т.п.), соответствующее управлению помощью при вождении согласно возмущениям.
[0179] Управление помощью при вождении согласно операции активируется, например, в ответ на операцию с управляющим устройством для вождения водителем, к примеру, с рулевым колесом 1, и, соответственно, активируется в ситуации при движении, распознанной водителем. Между тем, управление помощью при вождении согласно возмущениям активируется в ответ на ввод возмущений, например, таких как неровности дороги, и, соответственно, иногда активируется в ситуации, которая не распознается водителем. Следовательно, когда управление помощью при вождении согласно операции и управление помощью при вождении согласно возмущениям активируются одновременно, предпочтительно отображается изображение для отображения режима помощи, соответствующее управлению помощью при вождении согласно операции, в силу чего появляется возможность отображать надлежащее изображение для отображения режима помощи в надлежащее время.
[0180] (3) Время tsw отображения переключения задается для каждого типа для видов управления помощью при вождении.
Время tsw отображения переключения задается для каждого типа для видов управления помощью при вождении, в силу чего появляется возможность выполнять задание времени, совпадающее с отображаемым контентом, и подходящее время задается для каждого такого отображаемого контента, в силу чего появляется возможность выполнять отображение переключения, в котором дополнительно уменьшено раздражение.
[0181] Пример модификации
(1) В вышеописанных вариантах осуществления, виды HSA и HDC управления помощью при вождении предварительно установлены в качестве видов управления, активированных в ситуации, в которой нагрузка при вождении является относительно небольшой, и виды ATC, AEB, ARC и SMB управления помощью при вождении предварительно установлены в качестве видов управления, активированных в ситуации, в которой нагрузка при вождении является относительно большой. Затем приспосабливается такая конфигурация, которая отображает изображения для отображения режима помощи, включающие в себя изображения транспортного средства, просматриваемые из точек обзора, различающихся между видами управления помощью при вождении, которые активируются в ситуации, в которой нагрузка при вождении является относительно большой, и видами управления помощью при вождении, которые активируются в ситуации, в которой нагрузка при вождении является относительно небольшой, причем изображения для отображения режима помощи отличаются в режиме отображения в то время, когда управление работает.
Настоящее изобретение не ограничено этой конфигурацией. Например, при определении того, что скорость Vd транспортного средства автомобиля V составляет пороговое значение предварительно установленной скорости транспортного средства или более, на основе скорости Vd транспортного средства, контроллер 30 отображения определяет то, что нагрузка при вождении является относительно большой, и определяет то, что нагрузка при вождении является относительно небольшой, при определении того, что скорость Vd транспортного средства меньше порогового значения скорости транспортного средства. Затем может приспосабливаться такая конфигурация, которая, на основе результата этого определения, отображает изображения для отображения режима помощи, включающие в себя изображения транспортного средства, просматриваемые из точек обзора, различающихся между видами управления помощью при вождении, которые активируются в ситуации, в которой нагрузка при вождении является относительно большой, и видами управления помощью при вождении, которые активируются в ситуации, в которой нагрузка при вождении является относительно небольшой, причем изображения для отображения режима помощи отличаются в режиме отображения в то время, когда управление работает.
[0182] Например, в ситуации, в которой скорость Vd транспортного средства становится пороговым значением скорости транспортного средства или больше, появляется возможность отображать изображение для отображения режима помощи с отображаемым контентом в таком масштабе, что водитель может примерно распознавать оперативную ситуацию, например, какой тип из видов управления помощью при вождении работает, посредством быстрого перемещения линии взгляда и посредством периферийного поля зрения. Между тем, в ситуации, в которой скорость Vd транспортного средства становится меньше порогового значения скорости транспортного средства, появляется возможность отображать изображение для отображения режима помощи с отображаемым контентом, например, из которого водитель может понимать более подробную оперативную ситуацию управления помощью при вождении посредством наблюдения соответствующего отображаемого контента.
Эта проблема является применимой не только к различным видам управления помощью при вождении, но также и к идентичному управлению помощью при вождении. Другими словами, даже для идентичного управления помощью при вождении, можно изменять контент, который должен отображаться, на надлежащий контент, соответствующий абсолютной величине нагрузки при вождении, в зависимости от того, когда нагрузка при вождении является относительно большой и относительно небольшой.
[0183] (2) В вышеописанных вариантах осуществления, виды HSA и HDC управления помощью при вождении предварительно установлены в качестве видов управления, активированных в ситуации, в которой нагрузка при вождении является относительно небольшой, и виды ATC, AEB, ARC и SMB управления помощью при вождении предварительно установлены в качестве видов управления, активированных в ситуации, в которой нагрузка при вождении является относительно большой. Затем приспосабливается такая конфигурация, которая отображает изображения для отображения режима помощи, включающие в себя изображения транспортного средства, просматриваемые из точек обзора, различающихся между видами управления помощью при вождении, которые активируются в ситуации, в которой нагрузка при вождении является относительно большой, и видами управления помощью при вождении, которые активируются в ситуации, в которой нагрузка при вождении является относительно небольшой, причем изображения для отображения режима помощи отличаются в режиме отображения в то время, когда управление работает.
Настоящее изобретение не ограничено этой конфигурацией. Например, на основе значения обнаружения датчика угла наклона (не показан), смонтированного на автомобиле V, контроллер 30 отображения обнаруживает градиент проезжей дороги. Затем при определении того, что обнаруженный градиент имеет предварительно установленное пороговое значение градиента или больше, контроллер 30 отображения определяет то, что нагрузка при вождении является относительно большой, и определяет то, что нагрузка при вождении является относительно небольшой, при определении того, что обнаруженный градиент меньше порогового значения градиента. Затем может приспосабливаться такая конфигурация, которая, на основе результата этого определения, отображает изображения для отображения режима помощи, включающие в себя изображения транспортного средства, просматриваемые из точек обзора, различающихся между видами управления помощью при вождении, которые активируются в ситуации, в которой нагрузка при вождении является относительно большой, и видами управления помощью при вождении, которые активируются в ситуации, в которой нагрузка при вождении является относительно небольшой, причем изображения для отображения режима помощи отличаются в режиме отображения в то время, когда управление работает.
[0184] Например, в ситуации, в которой градиент проезжей дороги становится пороговым значением градиента или больше, появляется возможность отображать изображение для отображения режима помощи с отображаемым контентом в таком масштабе, что водитель может примерно распознавать оперативную ситуацию, например, какой тип из видов управления помощью при вождении работает, посредством быстрого перемещения линии взгляда и посредством периферийного поля зрения. Между тем, в ситуации, в которой градиент проезжей дороги становится меньше порогового значения градиента, появляется возможность отображать изображение для отображения режима помощи с отображаемым контентом, например, из которого водитель может понимать более подробную оперативную ситуацию управления помощью при вождении посредством наблюдения соответствующего отображаемого контента.
Эта проблема является применимой не только к различным видам управления помощью при вождении, но также и к идентичному управлению помощью при вождении. Другими словами, даже для идентичного управления помощью при вождении, можно изменять контент, который должен отображаться, на надлежащий контент, соответствующий абсолютной величине нагрузки при вождении, в зависимости от того, когда нагрузка при вождении является относительно большой и относительно небольшой.
[0185] Кроме того, вышеописанные варианты осуществления представляют собой предпочтительные конкретные примеры настоящего изобретения, и множество технически предпочтительных ограничений налагаются на них; тем не менее, объем настоящего изобретения не ограничен этими вариантами осуществления, если конкретно не описано то, что варианты осуществления налагают ограничения на настоящее изобретение. Кроме того, для удобства иллюстрации, чертежи для использования в вышеприведенном описании являются схематичными видами, в которых соотношения сторон элементов и фрагментов отличаются от фактических соотношений сторон.
Кроме того, настоящее изобретение не ограничено вышеописанными вариантами осуществления, и модификации, улучшения, эквиваленты и т.п. в пределах объема, когда может достигаться цель настоящего изобретения, включены в настоящее изобретение.
Как описано выше, содержимое заявки на патент (Япония) P2013-3631 (поданной 11 января 2013 года), относительно которой данная заявка притязает на приоритет, полностью содержится в данном документе по ссылке.
Здесь, настоящее изобретение описано со ссылкой на ограниченное число вариантов осуществления; тем не менее, объем прав не ограничен ими, и модификации соответствующих вариантов осуществления, которые основаны в вышеописанном раскрытии сущности, являются очевидными для специалистов в данной области техники.
Список номеров ссылок
[0186] V - автомобиль
1 - рулевое колесо
3 - датчик угла рулевого управления
16 - педаль тормоза
17 - устройство обнаружения операций нажатия тормоза
20 - измерительное устройство
21 - приборная панель
22 - первый измерительный прибор
24 - второй измерительный прибор
24b - индикатор
26 - жидкокристаллическое устройство отображения
28 - контроллер измерительных приборов
29 - запоминающее устройство изображений визуализации
30 - контроллер отображения
40 - устройство помощи при вождении
260 - экран отображения
260C - третья область отображения
261a, 261e, 261h - изображение сетки
261b, 261f - изображение транспортного средства
261DF - изображение по умолчанию
261IN - изображение для отображения во время вмешательства в управление
261LC -изображение визуализации рулевого управления влево
261RC -изображение визуализации рулевого управления вправо
261ARC, 261SMB1-SMB5, 261HSA(S), 261HSA(0), 261HDC -изображение визуализации
300 - ECU для управления отображением
300A - процессор ввода
300B - модуль управления отображением
300C - процессор управления задержкой времени отображения
300D - процессор выходных сигналов
300E - модуль определения порядка
302 - запоминающее устройство информации визуализации
304 - таймер для измерения времени отображения
Реферат
Устройство управления отображением содержит модуль обнаружения рабочего режима, модуль управления отображением, модуль обнаружения направления рулевого управления. При определении того, что управление помощью при вождении, выполненное с возможностью активироваться в то время, когда транспортное средство движется по извилистой дороге, и управлять тормозной/движущей силой соответствующих колес транспортного средства, активируется на основе рабочего режима, обнаруженного посредством модуля обнаружения рабочего режима, модуль управления отображением осуществляет управление для того, чтобы изменять форму фрагмента фонового изображения для изображения для отображения режима помощи, которое должно отображаться на устройстве отображения, на форму кривой, изогнутой в направлении рулевого управления, обнаруженном посредством модуля обнаружения направления рулевого управления. Предложены также устройство управления отображением для транспортного средства и способы управления отображением для транспортного средства. Достигается отображение информации, в котором распознаваемость информации относительно управления помощью при вождении является относительно хорошей даже в ситуации, в которой нагрузка при вождении является относительно большой, причем отображение информации не раздражает водителя. 4 н. и 6 з.п. ф-лы, 20 ил.
Комментарии