Устройство молокоотсоса - RU2754631C2
Код документа: RU2754631C2
Чертежи






Описание
ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к области грудного вскармливания и, в частности, к устройству молокоотсоса. Настоящее изобретение относится, в частности, к такому устройству молокоотсоса, которое имеет адаптивный корпус насоса с деформируемым исполнительным элементом, содержащим электроактивные материалы (ЭАМ).
УРОВЕНЬ ТЕХНИКИ
[0002] Известны молокоотсосы для извлечения молока из груди женщин, осуществляющих грудное вскармливание. Один пример известного молокоотсоса показан в качестве иллюстрации на ФИГ. 1. Устройство 100 молокоотсоса содержит блок 120 насоса, содержащий корпус 130 насоса и насосное устройство 140. Корпус 130 насоса задает откачиваемый объем, из которого насосное устройство 140 извлекает воздух для приложения отрицательного давления, чтобы имитировать сосание младенца во время грудного вскармливания. В данном примере насосное устройство 140 содержит электрическое насосное устройство, которое для простоты обращения частично расположено отдельно от корпуса 130 насоса.
[0003] В рабочем состоянии впускную часть 132 размещают на женской груди, извлекают грудное молоко посредством приложения отрицательного давления, и направляют грудное молоко через выпускную часть 134 в блок 110 резервуара. Как правило, блок резервуара содержит бутылочку, извлекаемую из молокоотсоса для подготовки извлеченного грудного молока для кормления младенца и/или для хранения.
[0004] В изображенном примере впускная часть 132 содержит массажную подушечку, которая выполнена так, чтобы быть мягкой и теплой наощупь, и имитирует сосательное действие младенца для обеспечения потока молока. Массажные подушечки доступны в различных размерах для приспособления к различным размерам груди.
[0005] Однако грудь пользователя также может менять свои размеры и упругость в течение периода грудного вскармливания, поэтому впускная часть 132 может не всегда прилегать безупречно, вследствие чего, несмотря на то, что она доступна в разных размерах, не всегда возможно достичь надлежащего вакуума и, следовательно, производительности всасывания. Пользователю требуется прижимать массажную подушечку или впускную часть 132 к груди для получения надлежащего вакуума, что потенциально может вызвать дискомфорт и раздражение у пользователя.
[0006] Кроме того, на производительность всасывания также влияет размер соска пользователя. Большие соски будут частично заполнять корпус 130 насоса, в то время как маленькие соски будут заполнять корпус 130 насоса в меньшей степени, что приведет к увеличению свободного объема внутри корпуса 130 насоса, что влияет на формирование вакуума.
[0007] Наконец, массаж и стимуляция груди оказывают доказанное влияние на объем молока, сцеженного женщинами, осуществляющими грудное вскармливание, что до настоящего времени выполнялось вручную.
[0008] Следовательно, задачей настоящего изобретения является обеспечение усовершенствованного устройства молокоотсоса, в котором устранены по меньшей мере некоторые из недостатков и неудобств, известных в предшествующем уровне техники.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0009] В одном аспекте предоставлено устройство молокоотсоса для сцеживания грудного молока. Устройство молокоотсоса содержит блок резервуара для приема сцеженного грудного молока и блок насоса, содержащий корпус насоса и насосное устройство для приложения отрицательного давления к откачиваемому объему, задаваемому корпусом насоса. Корпус насоса содержит впускную часть, выполненную с возможностью размещения на женской груди, и выпускную часть, выполненную с возможностью направления сцеженного молока в блок резервуара. Корпус насоса дополнительно содержит исполнительный элемент, содержащий активный материал, выполненный с возможностью деформации при подаче на него управляющего сигнала и с возможностью иметь бистабильную или мультистабильную конфигурацию, при этом деформация исполнительного элемента приводит к изменению по меньшей мере одного из формы и величины откачиваемого объема. Исполнительный элемент расположен на корпусе молокоотсоса, удаленном от части, предназначенной для контакта с женской грудью, при этом деформация исполнительного элемента приводит к изменению величины откачиваемого объема, заданного внутри корпуса молокоотсоса.
[0010] Поскольку корпус насоса выполнен с возможностью деформации и поскольку деформация исполнительного элемента приводит к изменению по меньшей мере одного из формы и величины откачиваемого объема, объем насоса и, следовательно, корпуса насоса и всего устройства молокоотсоса регулируются в соответствии с потребностями конкретного пользователя. Иными словами, исполнительный элемент, содержащий электроактивный материал, содействует в получении оптимальных характеристик всасывания посредством адаптивных элементов, влияющих на форму и/или величину откачиваемого объема при приведении в действие. Управляющий сигнал подается, например, на исполнительный элемент блоком управления устройством молокоотсоса.
[0011] Насосное устройство может представлять собой насосное устройство с электрическим или ручным управлением, которое создает отрицательное давление на откачиваемый объем. Например, в случае электрического насосного устройства, насосное устройство может содержать блок двигателя и диафрагму, используемую для создания и поддержания отрицательного давления в откачиваемом объеме. Поскольку разные формы и размеры груди и сосков обусловливают различную форму и/или процентное соотношение откачиваемого объема, занимаемого женской грудью при использовании, результатом этого будут различные характеристики отрицательного давления. Этот нежелательный эффект может быть учтен путем изменения по меньшей мере одного из формы и величины откачиваемого объема путем приведения в действие исполнительного элемента.
[0012] Предпочтительно, впускная часть плотно охватывает грудь и закрывает откачиваемый объем снаружи. В одном варианте реализации, впускная часть содержит массажную подушечку, которая выполнена так, чтобы быть мягкой и теплой наощупь, и имитирует сосательное действие младенца для улучшения потока молока.
[0013] Управляющий сигнал предпочтительно может быть управляющим сигналом любого типа, если он является подходящим для приведения в действие исполнительного элемента. Таким образом, управляющий сигнал может быть оптическим управляющим сигналом. В данном случае электроактивный материал также должен реагировать на подачу оптических сигналов посредством деформации. Специалист в данной области техники будет знать, где найти такие материалы в данной области техники. В данном случае, конфигурация устройства может содержать блоки для направления оптических сигналов к первой части материала. Подобные блоки могут содержать зеркала, линзы, оптические волокна и т. д. Однако управляющий сигнал, конечно, также может быть электрическим исполнительным сигналом.
[0014] Активный материал представляет собой материал, который может деформироваться или изменять свою форму при подаче управляющего сигнала, то есть при задействовании исполнительного элемента. Привод может означать, например, электрическое возбуждение (напряжением, полем или током) или приведение в действие оптическим образом (оптическим сигналом определенной частоты, цвета и/или интенсивности. Электро- или оптоактивные материалы представляют собой материалы, которые демонстрируют механическую деформацию при приведении в действие электрическим или оптическим путем с помощью подходящего управляющего сигнала. Определенные классы данных материалов также демонстрируют обратный эффект, то есть они могут выдавать электрический или оптический сигнал при механической деформации, что будет описано для следующих вариантов реализации. Точный механизм, с помощью которого возникают вышеуказанные эффекты, зависит от выбранного материала, а в некоторых случаях также от способа их встраивания в устройство. Вследствие вышеупомянутых эффектов, применение таких материалов в исполнительных механизмах и/или датчиках является преимущественным в устройстве молокоотсоса в соответствии с изобретением.
[0015] В варианте реализации, исполнительный элемент содержит электроактивный материал (ЭАМ), в частности электроактивный полимер (ЭАП).
[0016] Группа ЭАП представляет собой развивающийся класс материалов. Они сочетают в себе свои благоприятные свойства зависимости отклика от исполнительного сигнала с рядом преимущественных технических свойств, что позволяет использовать их в новых областях применения. Таким образом, например, ЭАП, как правило, демонстрирует относительно большую деформацию и силу в небольшом объеме или в тонком форм-факторе по сравнению с обычными другими механическими исполнительными механизмами или актюаторами на основе неорганических ЭАМ. ЭАП также обеспечивают бесшумную работу, точное электронное управление, быстрый отклик и возможность высокого разрешения и циклического приведения в действие с большим диапазоном возможных частот приведения в действие, таких как 0-20 кГц. И все данные свойства и преимущества включают в себя простое изготовление в различных формах с использованием хорошо установленных методов, обеспечивая возможность легкой интеграции в широкое разнообразие систем.
[0017] Как правило, материалы ЭАП могут быть разделены на два класса с разными свойствами, а именно диэлектрические ЭАП и ионные ЭАП.
[0018] Первые, диэлектрические ЭАП представляют собой материалы, приведение в действие которых вызывается электростатическими силами между двумя электродами, которые сжимают полимер, и основанные на них исполнительные механизмы, как правило, требуют большого напряжения для приведения в действие, но низкого потребления электропитания. Диэлектрические ЭАП не нуждаются в электропитании для удержания исполнительного механизма в заданном положении. Примерами являются электрострикционные полимеры и диэлектрические эластомеры.
[0019] В отличие от этого, в ионных ЭАП приведения в действие вызывается смещением ионов внутри полимера. Для приведения в действие требуется только низкое напряжение, но, как правило, требуется энергия, чтобы удерживать исполнительный механизм в заданном положении. Примеры ионных ЭАП включают конъюгированные/проводящие полимеры, металлические композиты ионного полимера (МКИП) и углеродные нанотрубки (УНТ). Другие примеры включают ионные полимерные гели.
[0020] В качестве альтернативы или в дополнение к ЭАП, могут также быть использованы другие ЭАМ, такие как оптоактивные материалы (OAM). ОАМ могут содержать полимеры, имеющие одну или более двойных связей, которые могут быть подвернуты цис-транс-изомеризации при облучении. Такими связями могут быть связи C=C, N=C или N=N. Такие материалы могут включать, например, стильбены.
[0021] В одном варианте реализации ЭАП содержит ионный ЭАП.
[0022] Поскольку устройство молокоотсоса предназначено для использования в контакте с женской грудью, использование ионных ЭАП является особенно предпочтительным, поскольку оно по своей природе безопасно для областей, контактирующих с кожей. Например, активация ионных полимеров требует напряжения только один-два вольта и, таким образом, может быть произведен контакт с кожей, не подвергая пользователя риску.
[0023] В варианте реализации исполнительный элемент также выполнен с возможностью эксплуатации в качестве датчика давления. Известны ЭАМ, которые демонстрируют электрический или даже оптический сигнал при механической деформации, который может быть преимущественно использован для вызова давления, прикладываемого к самому исполнительному элементу. В данном варианте реализации, поскольку приведение в действие и регистрация давления могут быть реализованы с использованием одного и того же исполнительного элемента, может быть осуществлен мониторинг эксплуатации устройства молокоотсоса и, в частности, деформации исполнительного элемента, вследствие чего может быть дополнительно улучшена индивидуальная адаптация к пользователю.
[0024] Предпочтительно, в данном варианте реализации управляющий сигнал содержит два управляющих сигнала, предназначенных для подачи на исполнительный элемент, при этом первый управляющий сигнал предназначен для управления деформацией исполнительного элемента, а второй управляющий сигнал используется при осуществлении регистрации устройством. Таким образом, управление устройством осуществляется с использованием управляющего сигнала, который эффективно состоит из управляющего сигнала и сигнала регистрации. Удобным является использование электроактивного свойства исполнительного элемента, используемого для регистрации, также и для приведения в действие исполнительного элемента. В данном случае исполнительный сигнал, предпочтительно, является электрическим исполнительным сигналом, и устройство и/или электроактивная структура могут содержать одно или более электродных устройств для применения подобного управляющего исполнительного сигнала. Исполнительный элемент, ввиду электроактивного материала, реагирует на электрическое поле или силу, создаваемую таким полем. Следовательно, по меньшей мере сигнал регистрации является электрическим сигналом, вследствие чего механический резонанс исполнительного механизма может быть определен на основе данного электрического сигнала регистрации.
[0025] Исполнительный сигнал и сигнал регистрации, когда оба из них являются электрическими в данном варианте реализации, могут быть выданы по отдельности но одно или более электродных устройств, а также могут быть наложены с получением комбинированного управляющего сигнала перед выдачей комбинированного управляющего сигнала на одно или более электродных устройств. Предпочтительно, присутствует только одно и то же электродное устройство для подачи исполнительного сигнала и сигнала регистрации.
[0026] Исполнительные элементы, в соответствии с вариантами реализации изобретения, используют следующий эффект. Когда подают сигнал регистрации на частоте, совпадающей с частотой механического резонанса, или одной из его гармоник, ЭАМ структуры, в конструкции устанавливается механическая стоячая волна, которая, в свою очередь, влияет на электрические характеристики конструкции. В частности, импеданс конструкции ниже для сигнала регистрации (и, следовательно, для данной части управляющего сигнала), соответствующего резонансной частоте, ввиду того, что механическая вибрация находится в фазе с сигналом измерения. В свою очередь, импеданс материала выше для сигнала измерения, соответствующего антирезонансной частоте материала (т.е. 1-й гармонике частоты резонанса), ввиду того, что механическая вибрация существует вне фазы с сигналом регистрации. Оказалось, что на подобных частотах регистрация является чрезвычайно эффективной, в то время как она больше не мешает одновременному срабатыванию.
[0027] Любая механическая нагрузка, такая как, например, давление, применяемое к электроактивной структуре, может стать причиной демпфирования в структуре, вызывая отклонение ее резонансной частоты (и гармоник резонансной частоты) от их обычных значений без демпфирования, вызывая, таким образом, несоответствие между высокочастотным сигналом регистрации и частотой механических колебаний (или 1-й гармоникой данной частоты в случае антирезонансного соответствия). Все изменения характеристик структуры резонансного электроактивного материала, вызванные изменением смещения резонансной частоты, могут быть преимущественно использованы для определения механической нагрузки с повышенной чувствительностью. Таким образом, смещение в резонансной частоте может быть обнаружено и/или определено. Обнаружение и/или определение импеданса может быть выполнено с преимуществом, как будет объяснено ниже в данном документе. Вышеуказанное относится ко всем устройствам, которые предназначены как для исполнительного воздействия, так и для регистрации на основе ЭАМ.
[0028] В изобретении, объединение исполнительного сигнала с сигналом регистрации может содержать или состоять из по меньшей мере частичного наложения исполнительного сигнала на сигнал регистрации во времени. Система управления, сгенерированная подобным образом, может предоставить устройству возможность одновременного срабатывания (ввиду части исполнительного сигнала) и регистрации (ввиду части обнаруживающего сигнала). Это обеспечивает устройству возможность регистрации во время активации. Путем наложения высокочастотного сигнала регистрации с меньшей амплитудой поверх первичного исполнительного сигнала с большей амплитудой регистрация и приведение в действие могут быть выполнены одновременно. Амплитуда обнаруживающего сигнала может быть значительно меньшей, чем амплитуда управляющего сигнала, например <10%, <5% или даже <1% от исполнительного сигнала. Таким образом, отклик деформации в исполнительном механизме может быть незначительным для сигнала регистрации по сравнению с реакцией, вызываемым исполнительным сигналом. Следовательно, четкость, точность и стабильность устройства как исполнительного механизма не ухудшаются.
[0029] Первый управляющий сигнал может иметь частоту, которая меньше частоты сигнала считывания. Например, уровень сигнала первого управляющего сигнала может быть по существу постоянным (сигнал постоянного тока) в течение периода времени, в течение которого происходит чередование обнаруживающего сигнала. В качестве альтернативы, частота исполнительного воздействия может быть в 2 или 5, или 10, или 20, или 50, или 100 или более 100 раз ниже, чем частота восприятия.
[0030] В варианте реализации исполнительный элемент расположен на впускной части и выполнен с возможностью адаптации формы впускной части, предназначенной для контакта с женской грудью.
[0031] Поскольку форма впускной части, предназначенной для контакта с женской грудью, может быть изменена путем приведения в действие исполнительного элемента в данном варианте реализации, впускные части, такие как предпочтительно содержащие массажную подушечку, могут прилегать для соответствия потребностям пользователя перед сцеживанием. Преимущественно, с улучшенным прилеганием, производительность всасывания устройства молокоотсоса может быть улучшена, и может быть предотвращено раздражение у пользователя. Предпочтительно, направление изгиба исполнительного элемента может быть в радиальном или угловом направлении относительно центральной воронки, такой как воронка сквозь впускную часть, или их комбинации. Предпочтительно, исполнительный элемент расположен позади контактирующего элемента впускной части, такого как массажная подушечка, вследствие чего массажная подушечка находится между исполнительным элементом и женской грудью во время использования.
[0032] В варианте реализации исполнительный элемент выполнен с возможностью деформации на основе регистрируемого давления. В данном варианте реализации исполнительный элемент, предпочтительно, находится в непосредственной близости от кожи женской груди, например, расположен на впускной части. Преимущественно, регистрируемое давление может предоставлять обратную связь, которая может быть использована для регулирования деформации исполнительного элемента, до того как сможет быть достигнут оптимальный вакуум. Иными словами, регистрируемое давление может быть использовано с целью обеспечения оптимизации адаптации впускной части к груди.
[0033] В варианте реализации исполнительный элемент выполнен с возможностью обнаружения припухлости и изменения деформации при обнаружении припухлости для уменьшения боли.
[0034] Например, припухлость может быть обнаружена по обнаруженному пику давления в данном варианте реализации. При обнаружении припухлости, обратная связь регистрируемого давления может, например, обеспечить уменьшение давления во избежание возникновения боли у пользователя. В качестве альтернативы или дополнения, массаж, выполняемый посредством переменного приведения в действие исполнительного элемента, может быть сфокусирован на области припухлости для её уменьшения.
[0035] В варианте реализации множество исполнительных элементов распределено по впускной части, в частности, радиально распределено по впускной части.
[0036] Также в данном варианте реализации впускная часть предпочтительно содержит канал в форме воронки и множество исполнительных элементов, распределенных по поверхности впускной части, которая должна находиться в контакте с женской грудью. Предпочтительно, пять исполнительных элементов радиально распределены на равных расстояниях по впускной части, при этом в других вариантах реализации также предусмотрено более или менее пяти исполнительных элементов и/или неравномерное распределение. На примере пяти исполнительных элементов может быть выполнена преимущественная регулировка впускной части в пяти различных положениях для обеспечения оптимального прилегания.
[0037] В варианте реализации исполнительный элемент выполнен с возможностью применения первого управляющего сигнала и наложенного второго управляющего сигнала, при этом первый управляющий сигнал выполнен с возможностью статической регулировки формы исполнительного элемента, а второй управляющий сигнал представляет собой изменяющийся сигнал с большей скоростью, реализующий функцию массажа.
[0038] В варианте реализации функция массажа включает в себя по меньшей мере одно из увеличенной силы и вибрации. Предпочтительно, разность между увеличенной силой и вибрацией представляет собой частоту и/или амплитуду меняющегося с большей скоростью во времени сигнала, который накладывается на первый управляющий сигнал.
[0039] Массаж и стимуляция области груди, расположенной вокруг соска, но не включая его, оказывает доказанное положительное влияние на объем молока, сцеженного женщинами, осуществляющими грудное вскармливание. Соответственно, устройство молокоотсоса, в соответствии с настоящим изобретением, обеспечивает улучшенную эффективность сцеживания молока.
[0040] В варианте реализации исполнительные элементы выполнены с возможностью индивидуального управления. Индивидуальное управление исполнительными элементами обеспечивает еще более улучшенную индивидуальную адаптацию формы впускной части к женской груди. В одном варианте реализации исполнительные элементы могут быть отрегулированы вручную. Предпочтительно, управление приведением в действие частично или полностью осуществляется с использованием обратной связи, основанной на регистрируемом давлении. Таким образом, оптимальный вакуум может быть достигнут и сохраняться непрерывно во время работы устройства молокоотсоса. Поскольку исполнительные элементы расположены в пространстве преимущественно по впускной части, становится возможным выполнение массажа по установленной схеме, который ранее должен был выполняться вручную, посредством последовательного приведения в действие исполнительных элементов. Преимущественно, реализация функции массажа осуществляется путем наложения дополнительного управляющего сигнала на ЭАП, приводимые в действие статически.
[0041] В варианте реализации множество исполнительных элементов пространственно расположены для обеспечения возможности массажа по схеме, в частности по спирали, в качестве отклика на управляющий сигнал.
[0042] Соответственно, статическое приведение в действие, предпочтительно, регулирует исполнительные элементы в соответствии с конкретным рабочим положением, при этом массаж по схеме использует усиленное воздействие с дополнительной силой в определенной области или сигналу вибрации, вызывающему стимулирование сцеживания. Предпочтительно, временной ряд приведения в действие множества исполнительных элементов предназначен для воспроизведения хорошо известного массажа по схеме для массажа груди, таких как, например, перемещение пальцев вокруг груди круговыми движениями; перемещение пальцев круговыми и спиральными движениями вокруг груди; и почесывание груди четырьмя пальцами, кроме большого пальца. Однако, в качестве альтернативы или дополнения, предусмотрены и другой массаж по схеме.
[0043] В варианте реализации, для реализации более сложного массажа по схеме множество исполнительных элементов содержит совокупности исполнительных элементов, которые обеспечивают более высокое пространственное разрешение исполнительных элементов и, следовательно, более точную эксплуатацию изменения формы и/или силы.
[0044] Предпочтительно, положение исполнительного элемента, по существу, противоположно отверстию впускной части, для предотвращения блокирования канала через впускную часть при деформации исполнительного элемента. Поскольку общая внутренняя величина откачиваемого объема изменяется посредством деформации исполнительного элемента, свободный объем внутри корпуса насоса может быть поддержан постоянным, независимо от размера соска пользователя. Поскольку на производительность всасывания влияет свободный объем, который влияет на образование вакуума, и поскольку свободный объем может быть поддержан постоянным, устройство молокоотсоса, в соответствии с настоящим вариантом реализации, обеспечивает улучшенную производительность всасывания, независимую от пользователя.
[0045] Предпочтительно, исполнительный элемент выполнен с возможностью изменения откачиваемого объема корпуса насоса приблизительно на 10 мл. Этого количества достаточно для учета разницы между маленькими и большими сосками.
[0046] Предпочтительно, вариант реализации исполнительного элемента, расположенного на расстоянии от части, предназначенной для вхождения в контакт с женской грудью, может быть скомбинирован с исполнительным элементом, предусмотренным на впускной части, как описано выше.
[0047] Предпочтительно, исполнительный элемент содержит механическую конструкцию, которая взаимодействует с активным материалом при приведении в действие активного материала, вследствие чего механическая конструкция переключается из первого устойчивого состояния во второе устойчивое состояние.
[0048] Устойчивое механическое состояние обозначает механическое состояние, которое может быть поддержано или поддерживается без применения внешнего воздействия, такого как, в частности, приведение в действие исполнительного элемента. Таким образом, механическое устройство предназначено для поддержания по меньшей мере второго устойчивого механического состояния после прекращения приведения в действие. Первым устойчивым механическим состоянием может быть состояние неприводного равновесия или состояния покоя исполнительной конструкции.
[0049] Этот исполнительный элемент объединяет исполнительную конструкцию, содержащую активный материал, с механической конструкцией, вследствие чего устройство может быть приведено в действие и иметь множество устойчивых состояний. Исполнительная конструкция осуществляет взаимодействие с механической конструкцией с целью приведения в действие устройства с целью переключения из одного состояния в другое. Это означает, что исполнительный элемент требует привода только тогда, когда он включен, а не в устойчивом состоянии.
[0050] Исполнительный элемент может быть использован для выдачи цифрового выходного сигнала (ниже порогового значения воздействие отсутствует, а выше порогового значения воздействие осуществляется с постоянной величиной) или даже выходного сигнала с множеством уровней. Следовательно, приведение в действие по существу аналоговой исполнительной конструкции преобразуется в цифровой выходной сигнал. Таким образом, осуществляется преобразование аналогового сигнала привода в цифровой выходной сигнал приведения в действие, и состояние приведения в действие сохраняется после удаления подаваемого сигнала привода.
[0051] Предпочтительно, при применении устройства молокоотсоса, объем корпуса насоса, таким образом, может быть адаптирован к цифровому переключению с большего откачиваемого объема на меньший откачиваемый объем, возможно, с дополнительными промежуточными уровнями, посредством приведения в действие исполнительного элемента, при отсутствии управляющего сигнала, необходимым является поддержание объема корпуса насоса в отрегулированном состоянии.
[0052] Кроме того, предпочтительно, регистрация давления в откачиваемом объеме осуществляется исполнительным элементом, и контроль переключения между двумя устойчивыми состояниями осуществляется управляющим сигналом, в случае, если давление превышает заданное пороговое значение. Например, давление, превышающее пороговое значение, может указывать на свободный откачиваемый объем, превышающий предпочтительный диапазон, вследствие чего откачиваемый объем может быть уменьшен путем переключения исполнительного элемента между двумя устойчивыми состояниями. Таким образом, адаптация к размеру соска может быть достигнута без необходимости непрерывного подачи управляющего сигнала на активный элемент. Дополнительные конкретные примеры би- и мульти-стабильных исполнительных устройств, содержащих активные материалы, раскрыты в неопубликованной предварительно Европейской патентной заявке № EP15189808.7, на которую делается ссылка.
[0053] Следует понимать, что предпочтительный вариант реализации настоящего изобретения также может представлять собой любую комбинацию зависимых пунктов формулы изобретения или представленных выше вариантов реализации с соответствующим независимым пунктом формулы изобретения.
[0054] Эти и другие аспекты изобретения будут очевидны и разъяснены со ссылкой на варианты реализации, описанные ниже.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0055] На следующих чертежах:
[0056] На ФИГ. 1 схематически и в качестве примера показан вариант реализации устройства молокоотсоса в соответствии с уровнем техники,
[0057] На ФИГ. 2 схематически и в качестве примера показано устройство из электроактивного полимера, которое не закреплено,
[0058] На ФИГ. 3 схематически и в качестве примера показано устройство из электроактивного полимера, которое ограничено защитным слоем,
[0059] На ФИГ. 4 схематически и в качестве примера показан первый пример устройства молокоотсоса, в соответствии с изобретением,
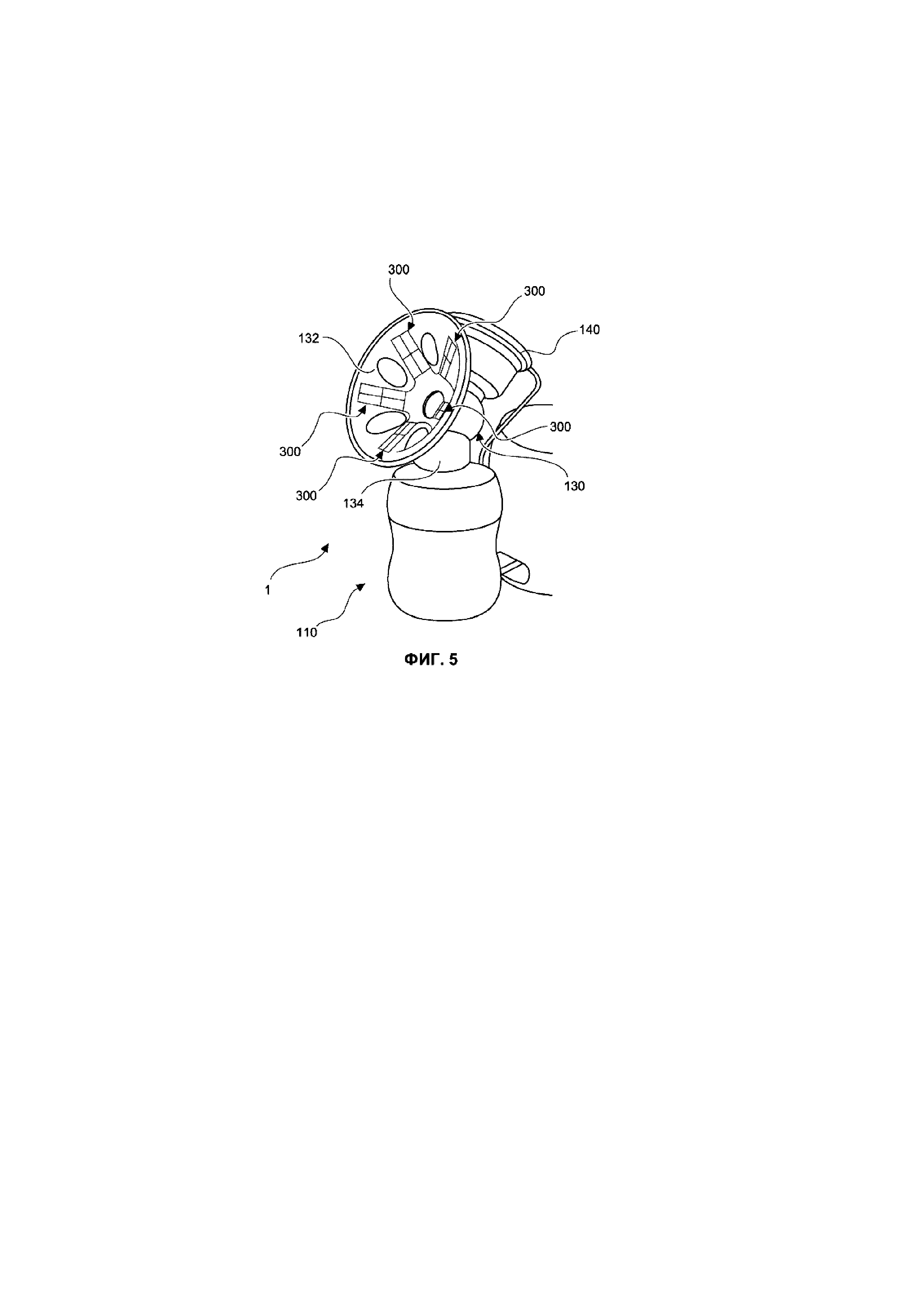
[0060] На ФИГ. 5 схематически и в качестве примера показан второй пример устройства молокоотсоса, в соответствии с изобретением,
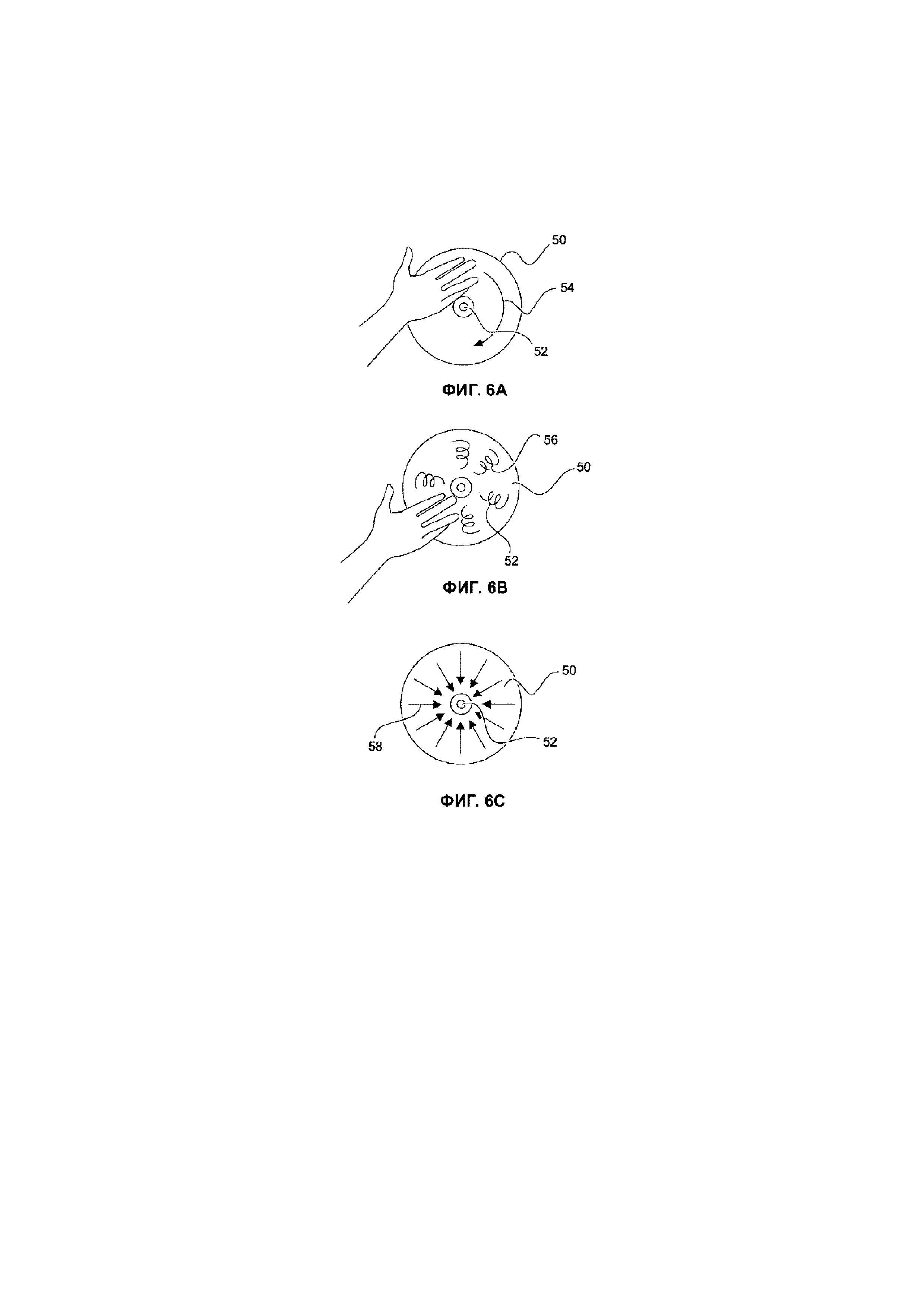
[0061] На ФИГ. 6А-6С схематически и в качестве примера показаны примеры массажа по схеме, реализованного в устройстве молокоотсоса, в соответствии с ФИГ. 5,
[0062] На ФИГ. 7А и 7В схематически и в качестве примера показан третий пример устройства молокоотсоса, в соответствии с изобретением,
[0063] На ФИГ. 8А, 8В, 8С и 8D схематически и в качестве примера показан вариант реализации молокоотсоса, в соответствии с изобретением, с отдельным ЭАП в воронке;
[0064] На ФИГ. 9А и 9В схематически и в качестве примера показан вариант реализации молокоотсоса, в соответствии с изобретением с несколькими ЭАП в воронке;
[0065] На ФИГ. 10А, 10В и 10С схематически и в качестве примера показан другой вариант реализации молокоотсоса, в соответствии с изобретением, с несколькими ЭАП в воронке;
[0066] На ФИГ. 11А и 11В схематически и в качестве примера показан еще один другой вариант реализации молокоотсоса, в соответствии с изобретением, с несколькими ЭАП в воронке;
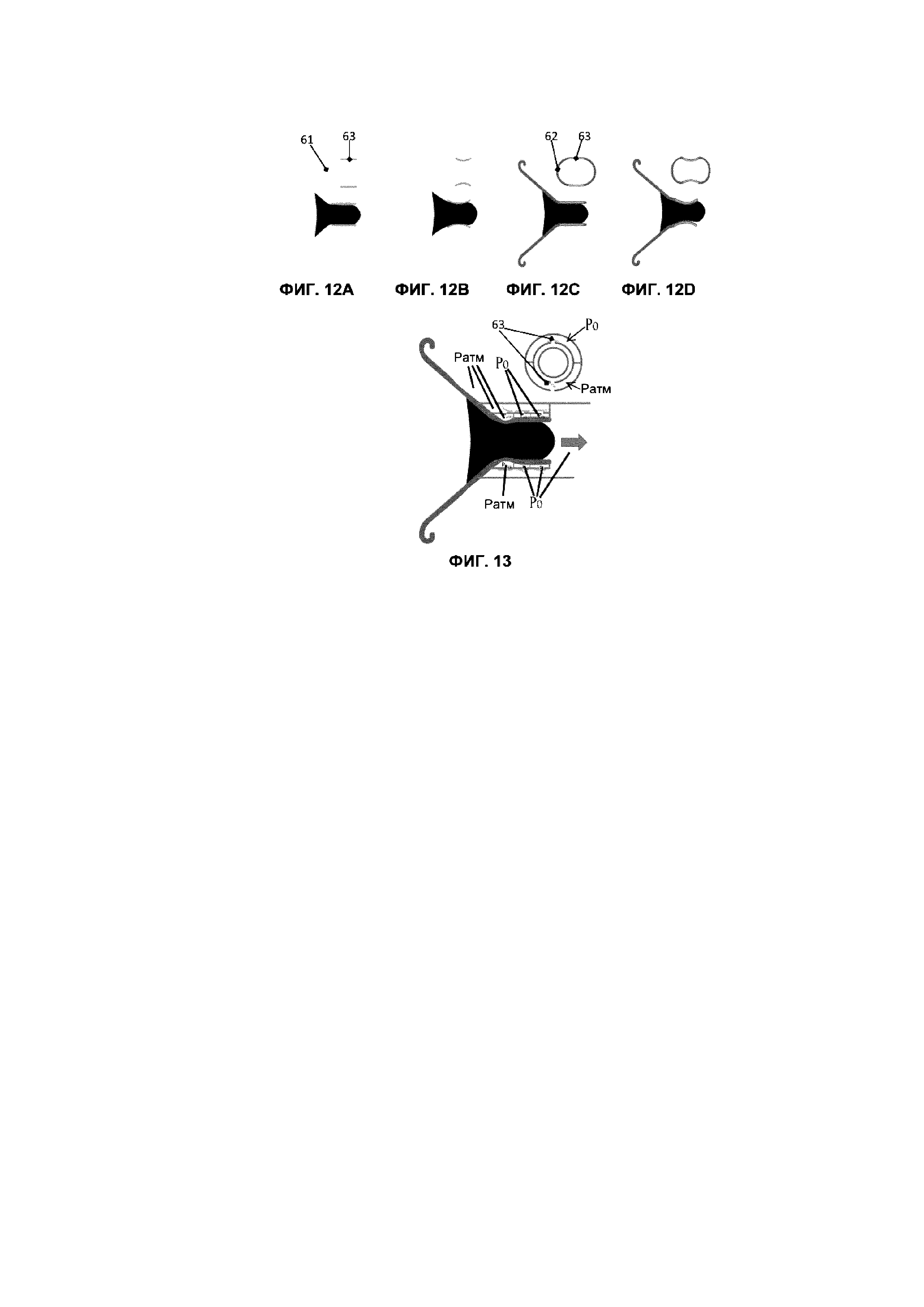
[0067] На ФИГ. 12А, 12В, 12С и 12D схематически и в качестве примера показан другой вариант реализации молокоотсоса, в соответствии с изобретением; и
[0068] На ФИГ. 13 схематически и в качестве примера показан другой вариант реализации молокоотсоса, в соответствии с изобретением.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0069] Устройство 100 молокоотсоса, изображенное на ФИГ. 1, и, в частности, корпус 130 насоса, имеет форму и размер, которые не являются регулируемыми.
[0070] Устройство 1 молокоотсоса, в соответствии с вариантами реализации изобретения, более конкретно, корпус 130 насоса, дополнительно содержит исполнительный элемент 200, 300, 400, который будет описан со ссылкой на ФИГ. 4-7 ниже, который выполнен с возможностью деформации при применении контрольного сигнала к нему. Деформация исполнительного элемента приводит к изменению по меньшей мере одного из формы и величины откачиваемого объема корпуса 130 насоса и позволяет адаптировать его к конкретным потребностям пользователя.
[0071] Далее, исполнительный элемент 200, 300, 400 содержит электроактивный материал (ЭАМ), в частности электроактивный полимер (ЭАП). Электроактивные материалы (ЭАМ) представляют собой класс материалов в области чувствительных к электричеству материалов. При реализации в исполнительном устройстве воздействие на ЭАМ электрического приводного сигнала может привести к изменению их размера и/или формы. Данный эффект может быть использован для задействования и регистрации. Существуют неорганические и органические ЭАМ. Особый вид органических ЭАМ представляет собой электроактивные полимеры (ЭАП). Электроактивные полимеры (ЭАП) представляют собой развивающийся класс чувствительных к электричеству материалов. ЭАП как ЭАМ могут функционировать в качестве датчиков или исполнительных механизмов, но их проще выполнить в различных формах, обеспечивая возможность легкой интеграции в широкое разнообразие систем. К другим преимуществам ЭАП относятся низкая мощность, малый форм-фактор, гибкость, бесшумная работа, а также точность, возможность высокого разрешения, быстрое время реагирования и циклическое приведение в действие. Устройство ЭАП может быть использовано в любой сфере применения, в которой желаемым является небольшое количество перемещения компонента или признака на основе воздействия электричеством. Подобным образом, технология может быть использована для регистрации незначительных движений. Использование ЭАП делает возможными функции, которые раньше были невозможными, или предоставляет большие преимущества по сравнению с обычными решениями для датчиков/актюаторов ввиду сочетания относительно большой деформации и усилия в небольшом объеме или в тонком форм-факторе, по сравнению с обычными актюаторами. ЭАП также обеспечивают бесшумное рабочее состояние, точное электронное управление, быстрый отклик и большой диапазон возможных частот приведения в действие, таких как 0-20 кГц.
[0072] На ФИГ. 2 и 3 показаны два возможных режима работы устройства из электроактивного полимера (ЭАП), которое содержит слой 14 ЭАП, зажатый между электродами 10, 12 на противоположных сторонах слоя 14 ЭАП. Хотя на ФИГ. 2 слой ЭАП может свободно перемещаться, на ФИГ. 3 весь слой ЭАП и его электроды прикреплены одной стороной к поддерживающему несущему слою 16. Разность напряжений (приводящий в действие сигнал), примененная к электродам 10 и 12, используется для предоставления электрического поля над слоем ЭАП, чтобы стать причиной расширения слоя ЭАП во всех направлениях, как показано. В то время как на ФИГ. 2 это приводит к деформации слоя ЭАП ввиду того, что слой свободно подвешен, подобное задействование на ФИГ.3 приводит к изгибу устройства ввиду ограничения свободы движения зажимом. С использованием конструкции устройства, может быть задействовано многообразие выходов устройства при приведения в действие слоя ЭАП, то есть при приведении устройства в действие. Таким образом, для получения асимметричного изгиба вокруг оси, как показано, например, может быть применена молекулярная ориентация (растяжение пленки), принудительно задавая движение в одном направлении. Расширение в одном направлении может быть результатом асимметрии в слое ЭАП, или оно может быть результатом асимметрии в свойствах несущего слоя, или их комбинации.
[0073] Устройство из электроактивного полимера (ЭАП), такое как устройства, показанные на ФИГ. 2 и ФИГ. 3, как правило, представляет собой аналоговое устройство, что означает, что кривая отклика привода и выхода представляет собой непрерывную кривую. Следовательно, любой сигнал, отличный от сигнала нулевого уровня/интенсивности, приведет к исполнительному выходному сигналу. В одном примере данные устройства необходимо приводить в действие для поддержания их активного состояния. В других примерах также предусмотрены различные примеры устройств на основе ЭАП, например такие, которые поддерживаются в своем активном состоянии. В качестве альтернативы или дополнения, также предусмотрены другие исполнительные элементы, отличные от устройств на основе ЭАП, такие как устройства на основе оптоактивного полимера (OAП) и тому подобное.
[0074] Более того, для определенных классов ЭАП применение небольшой силы (механическая нагрузка) к устройству генерирует электрический сигнал в качестве отклика. Это позволяет использовать единую структуру ЭАП как для приведения в действие, так и для регистрации.
[0075] На ФИГ. 4 схематически и в качестве примера показан первый пример устройства 1 молокоотсоса, в соответствии с изобретением. Множество компонентов устройства 1 молокоотсоса идентично компонентам устройства 100 молокоотсоса, описанным со ссылкой на ФИГ. 1 выше, и их описание, таким образом, опущено.
[0076] В дополнение, устройство 1 молокоотсоса содержит пять исполнительных элементов 200 , расположенных радиально вокруг центрального отверстия впускной части 132. Направление изгиба исполнительных элементов 200 может быть радиальным или угловым или их комбинацией. При приведении в действие форма впускной части 132 изменяется. В одном примере, впускная часть 132 выполнена в виде массажной подушечки, в которой управление исполнительными элементами 200 приводит к адаптированной форме массажной подушечки. В данном примере исполнительные элементы 200 управляются индивидуально, вследствие чего форма впускной части 132 может быть подобрана в соответствии с предпочтениями пользователя перед сцеживанием. Как указано выше, надлежащее прилегание может улучшить производительность всасывания устройства 1 молокоотсоса и может предотвратить боли или раздражения для пользователя.
[0077] Деформация исполнительных элементов 200 управляется путем подачи управляющего сигнала на каждый из исполнительных элементов 200. Адаптация формы, вызываемая исполнительными элементами 200, может быть отрегулирована вручную, например, путем нажатия кнопки на блоке управления устройства 1 молокоотсоса или автоматически посредством обратной связи от датчика давления, который может управлять регулированием каждого исполнительного элемента 200 , пока не будет достигнут оптимальный вакуум. Сам исполнительный элемент 200 может работать как датчик давления, использующий, например, другой управляющий сигнал, как описано выше. Хотя в данном примере было использовано пять исполнительных элементов 200, количество исполнительных элементов 200может быть изменено по мере необходимости.
[0078] В дополнение к реализации адаптации формы впускной части 132 устройство 1 молокоотсоса может дополнительно реализовывать функцию массажа посредством, например, наложения второго управляющего сигнала на исполнительные элементы 200, которые обычно управляются статическим образом для поддержания желаемой формы деформации. В зависимости от наложенного управляющего сигнала может быть выполнена повышенная сила в определенной области, которая требует индивидуального управления каждым исполнительным элементом 200 , или вибрационный сигнал, который вызывает стимуляцию сцеживания. В одном примере исполнительные элементы 200 задействуют последовательно для выполнения массажа груди по схеме.
[0079] На ФИГ. 5 схематически и в качестве примера показан еще один пример устройства 1 молокоотсоса, в котором реализованы совокупности 300 исполнительных элементов вместо исполнительных элементов 200 , показанных на ФИГ. 4. В данном примере каждая совокупность 300 исполнительных элементов разделена на четыре индивидуально приводимые в действие секции исполнительных элементов, что приводит к повышенному пространственному разрешению деформаций, которое может быть выполнено путем управления совокупностями 300 исполнительных элементов. Например, более сложный массаж для массажа груди по схеме, как будет описано со ссылкой на ФИГ. 6, может быть реализован посредством эксплуатации совокупностей 300 исполнительных элементов.
[0080] На ФИГ. 6А-6С показаны три неограничивающих примера подходящего массажа груди по схеме и, в частности, груди, исключая сосок. Эти примеры показали свою эффективность для увеличения сцеживания молока при ручном исполнении в прошлом. В соответствии с этим, данные схемы, показали свою эффективность при реализации автоматическим образом в устройстве 1 молокоотсоса. На каждой из ФИГ. 6A-6C схематически и в качестве примера показана грудь 50 с соском 52, расположенным в центре груди 50.
[0081] На ФИГ. 6А стрелка 54 указывает круговое движение в области груди вокруг, но не включая сосок 52. Это круговое движение может быть повторено произвольно.
[0082] На ФИГ. 6В показано круговое и спиральное движение 56, начинающееся от края и продолжающееся вокруг груди. Он начинается на краю груди и движется по направлению к соску 52. Если встречается припухлость, на неё отводится больше времени, с целью повысить вероятность того, что женщина не испытывает боли.
[0083] На ФИГ. 6С показана схема 58 формы почесывания, в которой давление начинается от края груди и продвигается как несколько пальцев или зубьев гребня в направлении соска 52.
[0084] Предпочтительно, массаж по схеме, показанный на ФИГ.6А, ФИГ.6В и ФИГ.6С, реализуются с помощью устройства 1 молокоотсоса в данной последовательности. Однако, безусловно, могут быть использованы и другие последовательности данного массажа по схеме или альтернативный/дополнительный массаж по схеме.
[0085] На ФИГ. 7А и 7В схематически и в качестве примера показаны два вида третьего примера устройства 1 молокоотсоса, более конкретно, корпуса 130 насоса, содержащего третий вариант исполнительного элемента 400 .
[0086] На ФИГ. 7A и 7B, в дополнение к впускной части 132 и выпускной части 134 показана часть 136 для установки насосного устройства. Ручное или электронное насосное устройство, такое как насосное устройство 140, показанное на ФИГ. 4 и 5, может быть установлено на установочной части 136 насосного устройства. Отрицательное давление может быть применено и поддержано в откачиваемом объеме, определенном в корпусе 130 насоса, посредством эксплуатации насосного устройства 140.
[0087] Исполнительный элемент 400 показан в положении, противоположном впускной части 132, т.е. в положении, удаленном от соска пользователя, при эксплуатации устройства 1 молокоотсоса работает и безупречном прилегании груди к впускной части 132. На ФИГ. 7А исполнительный элемент 400 показан отклоненным наружу, в то время как он является загнутым внутрь на ФИГ. 7B. Путем загибания внутрь, исполнительный элемент 400 уменьшает откачиваемый объем в корпусе 130 насоса. Таким образом, путем приведения в действие исполнительного элемента 400 свободный объем внутри корпуса 130 насоса поддерживается по существу постоянным, несмотря на различные размеры сосков, вследствие чего может быть обеспечена эффективность всасывания. Предпочтительно, объемное смещение составляет в порядке величины 10 мл, при этом, безусловно, также предусмотрены другие величины.
[0088] Предпочтительно, исполнительный элемент 400 может, как описано выше, действовать работать как датчик давления и исполнительный элемент, при этом контур обратной связи может затем быть использован для компенсации изменения давления. Изменение давления вызывает усилие на исполнительном элементе 400, которое затем может быть использовано для отклонения, в случае необходимости. В качестве дополнения или альтернативы, исполнительный элемент 400 может иметь бистабильную или мультистабильную конфигурацию для предотвращения влияния изменения давления, при этом исполнительный элемент 400затем может оставаться в отклоненном положении без постоянной необходимости применения управляющего сигнала.
[0089] На ФИГ. 8А, 8В, 8С и 8D показан вариант реализации одного ЭАП в воронке для имитации давления языка младенца. В данном примерном варианте реализации используется одна вставка (63) из ЭАП, и она расположена между воронкой (61) из жесткого пластика и подушечкой (62). Когда напряжение применяется к ЭАП (63), он будет растягиваться, и ввиду несущего слоя композит будет изгибаться, как показано на ФИГ. 8B и 8D. Это может быть либо плоский композит (ФИГ. 8A и 8B), либо композит изогнутой формы (ФИГ. 8C и 8D). Данные ЭАП также могут быть использованы для измерения сил, которые сосок (60) оказывает на данное положение на стенке.
[0090] На ФИГ. 9А, 9В, 10А, 10В и 10С показано использование двух или более ЭАП для имитации поведения младенца или для измерения сил в нескольких точках. В данном варианте реализации несколько ЭАП используются для имитации движения губ младенца. Например, 2 ЭАП (63), обращенные друг к другу, используются для имитации губ младенца, как показано на ФИГ. 9A и 9B. Вместо двух ЭАП, вокруг соска также может быть размещен ЭАП в форме кольца для оказания равномерного давления на сосок. Несколько ЭАП (63), например, в форме 3 последовательных колец, также могут быть использованы для создания перистальтического качающегося движения, как показано на ФИГ. 10А, 10В и 10С.
[0091] На ФИГ. 11A и 11B показан вариант реализации, в котором ЭАП (63) расположены таким образом, что они стимулируют ткань ареолы для получения более быстрого рефлекса выброса молока РВМ или более комфортных ощущений.
[0092] Во всех вышеприведенных вариантах реализации ЭАП расположены между жесткой пластиковой воронкой и мягкой подушечкой. Однако ЭАП (63) также могут быть непосредственно расположены или встроены в жесткую пластиковую воронку (61) или в подушечку (62), как показано на ФИГ. 12A и 12B или ФИГ. 12C и 12D соответственно.
[0093] На ФИГ.13 показан вариант реализации, в котором клапаны ЭАП (63) регулируют давление между двумя уровнями давления Po и Patm с целью реализации переменного давления на молочных протоках. В данном другом альтернативном варианте реализации, ЭАП действует как клапан, который регулирует давление воздуха в полости, окружающей сосок. Полость соединена с вакуумом молокоотсоса (Po), а также с окружающей средой (Patm), при этом ЭАП действует как переключатель для управления обоими состояниями давления и создания перистальтического движения давления. ЭАП в выключенном состоянии блокирует выход воздуха в окружающую среду, а задействованный ЭАП блокирует пониженное давление (Po), вследствие чего полость может быть отрегулирована между двумя состояниями. Полости в данном качестве предназначены для небольшого сжатия соска при давлении окружающей среды. При приведении в действие ЭАП, пониженное давление смещается локально, а полость (заполненная воздухом) оказывает давление на сосок. Если несколько клапанов ЭАП присутствуют и эксплуатируются в последовательности, это может имитировать поведение сосания младенца. Данный вариант реализации может потенциально создать большее давление и толчок, чем может обеспечить отдельный ЭАП. Вариант реализации показан на ФИГ.13 в качестве примера. Пример имеет два клапана ЭАП в полости. Варианты реализации с одним клапаном в полости также возможны.
[0094] Несмотря на то, что в приведенном выше в данном документе подробном описании были описаны конструкция и эксплуатация устройства молокоотсоса в соответствии с изобретением для ЭАП, изобретение фактически может быть использовано для устройств на основе других видов материала ЭАМ. Следовательно, если не указано иное, материалы ЭАП выше в данном описании могут быть заменены другими материалами ЭАМ. Подобные другие материалы ЭАМ известны в области техники, и специалист в области техники будет знать, где их найти и как их применять. Ряд опций будет описан ниже.
[0095] Общий подкласс устройств из ЭАМ состоит из приводимых в действие полем и электрическим током или зарядом (ионов) ЭАМ. Приводимые в действие полем ЭАМ задействуют посредством электрического поля через прямое электромеханическое соединение, при этом исполнительный механизм для приводимых в действие электрическим током или зарядом ЭАП включает диффузию ионов. Последний механизм чаще встречается в соответствующих органических ЭАМ, таких как ЭАП. В то время как приводимые в действие полем ЭАМ, как правило, приведены в действие с помощью сигналов напряжения и испытывают необходимость в соответствующих драйверах/контроллерах напряжения, приводимые в действие электрическим током ЭАМ, как правило, приведены в действие с помощью сигналов электрического тока или заряда, иногда испытывающих необходимость в использовании драйверов электрического тока. Оба класса материалов имеют множество членов семейств, каждый из которых обладает своими преимуществами и недостатками.
[0096] Приводимые в действие полем ЭАМ могут быть органическими или неорганическими материалами, и, в случае если они органические, могут быть одномолекулярными, олигомерными или полимерными. Органические материалы и в особенности полимеры представляют собой развивающийся класс материалов, вызывающих растущий интерес, поскольку они сочетают исполнительные свойства с такими свойствами материала, как легкий вес, дешевое производство и простота обработки.
[0097] Приводимые в действие полем ЭАМ и, следовательно, также ЭАП, как правило, являются пьезоэлектрическими и, возможно, ферроэлектрическими, и, таким образом, содержат самопроизвольную постоянную поляризацию (дипольный момент), являются электрострикционными и, таким образом, содержат только поляризацию (дипольный момент) при приведении в действие, но не когда приведение в действие отсутствует, или являются диэлектрическим релаксорными материалами. Подобные полимеры включают, но без ограничения, подклассы: пьезоэлектрические полимеры, ферроэлектрические полимеры, электрострикционные полимеры, релаксорные ферроэлектрические полимеры, диэлектрические эластомеры, жидкокристаллические эластомеры.
[0098] Отсутствие самопроизвольной поляризации означает, что электрострикторы демонстрируют небольшие гистерезисные потери или их полное отсутствие даже при очень высоких частотах эксплуатации. Однако, преимущества достигаются за счет температурной стабильности. Эксплуатация релаксоров осуществляется наилучшим образом в ситуациях, когда температура может быть стабилизирована в пределах примерно до 10°C. На первый взгляд это может показаться крайне ограничивающим, но, учитывая, что электрострикторы являются превосходными на высоких частотах и очень низких полях приведения в действие, в то время как приложения имеют тенденцию быть использованными в специализированных микроактюаторах. Стабилизация температуры таких небольших устройств является относительно простой и часто представляет собой лишь незначительную проблему в общем процессе проектирования и разработки.
[0099] Первым заметным подклассом приводимых в действие полем ЭАП являются пьезоэлектрические и электрострикционные полимеры. В то время как электромеханическая производительность традиционных пьезоэлектрических полимеров ограничена, прорыв в улучшении данной производительности привел к созданию ПВДФ релаксорных полимеров, которые проявляют самопроизвольную электрическую поляризацию (выравнивание, приводимое в действие полем). Данные материалы могут быть предварительно растянуты для улучшенной производительности в направлении растяжения (предварительное растяжение приводит к лучшему молекулярному выравниванию). Как правило, используются металлические электроды, поскольку растяжения обычно находятся в умеренном режиме (1-5%). Другие типы электродов (такие как проводящие полимеры, масла на основе углеродной сажи, гели или эластомеры и т. д.) также могут быть использованы. Электроды могут быть сплошными или сегментированными.
[0100] Другим представляющим интерес подклассом приводимых в действие полем ЭАП, являются диэлектрические эластомеры. Тонкая пленка данного материала может быть зажата между соответствующими электродами, образуя конденсатор с параллельными пластинами. В случае диэлектрических эластомеров, напряжение Максвелла, вызванное приложенным электрическим полем, приводит к напряжению на пленке, вызывая уменьшение ее толщины и расширение ее площади. Эффективность растяжения, как правило, повышается путем предварительного растяжения эластомера (присутствует необходимость в раме для поддержания предварительного растяжения). Растяжения могут быть значительными (10-300%). Это также ограничивает тип электродов, которые могут быть использованы: для низких и умеренных деформаций могут быть рассмотрены металлические электроды и проводящие полимерные электроды, для режима высоких растяжений, как правило, используются масла на основе углеродной сажи, гели или эластомеры. Электроды могут быть сплошными или сегментированными.
[0101] Первым заметным подклассом ионных ЭАП являются металлические композиты ионного полимера (МКИП). МКИП состоят из набухшей в разбавителе ионообменной полимерной мембраны, расщепленной между двумя тонкими электродами на основе металла или углерода, и испытывают необходимость в применении электролита. Типичными материалами электродов являются Pt, Gd, УНТ, CP, Pd. Типичными электролитами являются растворы Li + и Na + на водной основе. Во время применении поля, катионы, как правило, перемещаются к катодной стороне вместе с водой. Это приводит к реорганизации гидрофильных кластеров и расширению полимера. Растяжение в области катода приводит к напряжению в остальной части полимерной матрицы, что приводит к изгибу в направлении анода. Применение напряжения в противоположном направлении осуществляет инвертирование изгиба. Хорошо известными полимерными мембранами являются Nafion® и Flemion®.
[0102] Более подробно, МКИП состоят из ионного полимера, такого как Nafion или Flemion, поверхности которого химически покрыты или физически покрыты проводниками, такими как платина или золото, или электродами на основе углерода. При примененном напряжении миграция и перераспределение ионов ввиду приложенного напряжения на полоске МКИП приводят к деформации изгиба. Полимер представляет собой набухшую в растворителе ионообменную полимерную мембрану. Поле вынуждает катионы перемещаться в сторону катода вместе с водой. Это приводит к реорганизации гидрофильных кластеров и расширению полимера. Растяжение в области катода приводит к напряжению в остальной части полимерной матрицы, что приводит к изгибу в направлении анода. Применение напряжения в противоположном направлении осуществляет инвертирование изгиба.
[0103] Другим заметным подклассом ионных полимеров являются конъюгированные/проводящие полимеры. Исполнительный механизм на основе конъюгированного полимера, как правило, состоит из электролита, зажатого между двумя слоями конъюгированного полимера. Электролит используется для изменения степени окисления. Когда потенциал применен к полимеру через электролит, электроны добавляются или удаляются из полимера, приводя в действие окисление и понижение. Понижение приводит к сокращению, окислению в расширении.
[0104] В одном примере материал ЭАМ или ЭАП является электрострикционным полимером, таким как релаксорный ферроэлектрический материал. Подобные материалы могут иметь электрострикционную константу, которая является достаточно высокой для надлежащего практического использования, т.е. является преимущественным для одновременных регистрационных и исполнительных функций. Релаксорные ферроэлектрические материалы не являются ферроэлектрическими, когда на них подают нулевое поле возбуждения (т.е. напряжение), но становятся ферроэлектрическими во время возбуждения. Следовательно, в материале отсутствует электромеханическая связь при отсутствии возбуждения. Электромеханическая связь становится ненулевой при подаче сигнала возбуждения и может быть измерена путем подачи высокочастотного сигнала малой амплитуды поверх сигнала возбуждения в соответствии с процедурами, описанными выше. Более того, релаксорные ферроэлектрические материалы имеют преимущество от уникального сочетания сильной электромеханической связи при ненулевом сигнале возбуждения и надлежащих исполнительных характеристиках.
[0105] Наиболее часто используемыми примерами неорганических релаксорных ферроэлектрических материалов являются: ниобат свинца-магния (PMN), ниобат свинца-магния-титанат свинца (PMN-PT) и титанат цирконата свинца лантана (PLZT). Однако в данной области техники известны другие материалы.
[0106] Примерами ЭАП, приводимых в действие полем, являются пьезоэлектрические эластомеры, ферроэлектрические полимеры, электрострикционные полимеры (такие как релаксорные полимеры или полиуретаны на основе ПВДФ), диэлектрические эластомеры и жидкокристаллические эластомеры (ЖКЭ). Таким образом, предпочтительно, материал ЭАП является релаксорным ферроэлектрическим полимером, таким как, например, ПВДФ на основе релаксорного ферроэлектрического полимера. Подобным материалом может быть любой, выбранный из группы материалов, приведенной ниже.
[0107] Подкласс электрострикционных полимеров подкласса включает, но без ограничения:
[0108] Поливинилиден фторид (ПВДФ), Поливинилиден фторид - трифторэтилен (ПФДФ-ТФЭ), Поливинилиден фторид - трифторэтилен - хлорфторэтилен (ПВДФ-ТФЭ-ХФЭ), Поливинилиден фторид - трифторэтилен - хлортрифторэтилен (ПВДФ-ТФЭ-ХТФЭ) Поливинилиден фторид - гексафторпропилен (ПВДФ - ГФП), полиуретаны или их смеси.
[0109] Приводимые в действие током ЭАМ и ЭАП содержат конъюгированные полимеры, металлические композиты ионного полимера, ионные гели и полимерные гели.
[0110] Примерами ЭАП, приводимых в действие ионами, являются конъюгированные полимеры, полимерные композиты углеродной нанотрубки (УНТ) и металлические композиты ионного полимера (МКИП). Металлический композит ионного полимера (МКИП) представляет собой синтетический композиционный наноматериал, который демонстрирует поведение искусственных мышц под воздействием подаваемого напряжения или электрического поля.
[0111] Подкласс диэлектрических эластомеров включает, но без ограничения: акрилаты, полиуретаны, силиконы.
[0112] Подкласс конъюгированных полимеров включает, но без ограничения: полипиррол, поли-3,4-этилендиокситиофен, поли(п-фениленсульфид), полианилины.
[0113] Указанные выше материалы могут быть внедрены в качестве чистых материалов или в качестве материалов, суспендированных в матричных материалах. Матричные материалы могут содержать полимеры.
[0114] Для любой исполнительной конструкции, содержащей материал ЭАМ, могут быть предоставлены дополнительные пассивные слои для оказания воздействия на поведение слоя ЭАМ в ответ на применяемый сигнал приведения в действие.
[0115] В некоторых случаях тонкопленочные электроды добавляются, когда самому полимеру не хватает достаточной проводимости (относительно размера). Электролит может быть жидкостью, гелем или твердым материалом (т.е. комплексом полимеров с высоким молекулярным весом и солей металлов). Наиболее распространенными конъюгированными полимерами являются полипирол (PPy), полианилин (PANi) и политиофен (PTh).
[0116] Актюатор также может быть выполнен из углеродных нанотрубок (УНТ), суспендированных в электролите. Электролит образует двойной слой с нанотрубками, что обеспечивает возможность инжекции зарядов. Данная двухслойная инжекция заряда считается первичным механизмом в УНТ-актюаторах. УНТ действует как электродный конденсатор с зарядом, инжекируемым в УНТ, который затем уравновешивается электрическим двойным слоем, образованным движением электролитов к поверхности УНТ. Изменение заряда на атомах углерода приводит к изменению длины связи С-С. В результате может быть осуществлено наблюдение за расширением и сжатием отдельной УНТ.
[0117] Другие вариации описанных вариантов реализации могут быть поняты и реализованы специалистом в области техники при осуществлении настоящего изобретения на практике после ознакомления с чертежами, описанием и прилагаемой формулой изобретения.
[0118] В пунктах формулы изобретения слово «содержащий» не исключает наличия других элементов или этапов, а грамматические показатели единственного числа не исключают множественного числа.
[0119] Отдельный блок или устройство могут выполнять функции нескольких элементов, перечисленных в пунктах формулы изобретения. Сам по себе тот факт, что некоторые меры перечислены во взаимно отличающихся зависимых пунктах, не указывает на то, что комбинация этих мер не может быть с успехом использована.
Реферат
Изобретение относится к медицинской технике. Устройство молокоотсоса для сцеживания грудного молока содержит блок (110) резервуара для приема сцеженного грудного молока и блок (120) насоса, содержащий корпус (130) насоса и насосное устройство (140) для приложения отрицательного давления к откачиваемому объему, задаваемому корпусом (130) насоса. Корпус (130) насоса содержит впускную часть (132), выполненную с возможностью размещения на женской груди, и выпускную часть (134), выполненную с возможностью направления сцеженного молока в блок (110) резервуара. Корпус (130) также содержит исполнительный элемент (200, 300, 400), содержащий активный материал, выполненный с возможностью деформации при подаче на него управляющего сигнала и с возможностью иметь по меньшей мере бистабильную конфигурацию. Деформация исполнительного элемента (200, 300, 400) приводит к изменению по меньшей мере одного из формы и величины откачиваемого объема. Исполнительный элемент (400) расположен на корпусе (130) насоса, удаленном от части, предназначенной для контакта с женской грудью. Деформация исполнительного элемента (400) приводит к изменению величины откачиваемого объема, заданного внутри корпуса (130) насоса. Технический результат состоит в повышении объема откачиваемого молока. 10 з.п. ф-лы, 13 ил.
Комментарии