Гибкое устройство и способ управления гибким устройством - RU2645665C2
Код документа: RU2645665C2
Чертежи










Описание
Область техники
[1] Настоящее раскрытие изобретения относится к гибкому устройству и способу управления гибким устройством. Конкретнее, настоящее раскрытие изобретения относится к гибкому устройству, которое может изменять форму, и к способу управления этим устройством.
Предшествующий уровень техники
[2] В целом, гибкие устройства отображения относятся к устройствам отображения изображений, которые реализуются путем формирования гибкой подложки с использованием пластмассы или полимерной пленки. Такое гибкое устройство отображения можно реализовать в виде жидкокристаллического дисплея (LCD), дисплея на органических светодиодах (OLED), бумаги с электронными чернилами или т.п. Поскольку такой гибкий дисплей изготавливается путем замены стеклянной подложки из предшествующего уровня техники упругим материалом, гибкий дисплей можно изгибать или сворачивать как бумагу, и его легко переносить.
[3] Однако гибкое устройство отображения в соответствии с предшествующим уровнем техники изгибается всего лишь с помощью ручной силы. В результате, если не поддерживается сила, приложенная к гибкому устройству отображения, то гибкое устройство отображения возвращается к первоначальной форме вследствие упругости гибкого дисплея. Поэтому пользователю доставляет неудобство возврат гибкого устройства отображения к первоначальной форме, когда пользователь приводит гибкое устройство отображения в нужную форму и хочет, чтобы гибкое устройство отображения удерживало эту форму.
[4] Соответственно, существует потребность в способе для удержания гибкого устройства отображения в состоянии изгиба или управляемом состоянии.
[5] Вышеприведенная информация представляется в качестве вспомогательной информации только для содействия пониманию настоящего раскрытия изобретения. Не дано никакого определения и не сделано никакого утверждения в отношении того, могло ли любое из вышеупомянутого быть применимым в качестве известного уровня техники относительно настоящего раскрытия изобретения.
Раскрытие изобретения
Техническая задача
[6] Аспекты настоящего раскрытия изобретения относятся к устранению, по меньшей мере, вышеупомянутых проблем и/или недостатков и обеспечению, по меньшей мере, описанных ниже преимуществ. Соответственно, аспектом настоящего раскрытия изобретения является предоставление гибкого устройства, которое может изменять форму, и способа управления этим устройством.
Решение задачи
[7] Аспектами настоящего раскрытия изобретения являются предоставление гибкого устройства, которое может удерживать гибкое устройство в состоянии изгиба, когда проводится предварительно определенная манипуляция пользователя, после того, как гибким устройством манипулируют, и способа управления гибким устройством.
[8] В соответствии с аспектом настоящего раскрытия изобретения предоставляется гибкое устройство. Гибкое устройство включает в себя датчик, сконфигурированный для обнаружения изгиба гибкого устройства, приспособление удержания изгиба, сконфигурированное для поддержки состояния изгиба у гибкого устройства, и контроллер, сконфигурированный для управления операциями гибкого устройства, причем контроллер управляет приспособлением удержания изгиба для поддержки состояния изгиба у гибкого устройства, когда принимается предварительно определенный ввод, пока гибким устройством манипулируют.
[9] В соответствии с аспектом настоящего раскрытия изобретения гибкое устройство может дополнительно включать в себя запоминающее устройство, сконфигурированное для хранения информации, относящейся к состоянию изгиба у гибкого устройства, и когда гибким устройством манипулируют, контроллер может сохранить в запоминающем устройстве информацию, относящуюся к состоянию изгиба, и когда принимается предварительно определенный ввод, контроллер может осуществлять управление для поддержки состояния изгиба у гибкого устройства с использованием сохраненной информации.
[10] В соответствии с аспектом настоящего раскрытия изобретения информация, относящаяся к состоянию изгиба, может включать в себя по меньшей мере одно из области изгиба, угла изгиба и направления изгиба у гибкого устройства.
[11] В соответствии с аспектом настоящего раскрытия изобретения контроллер может осуществлять управление для поддержки состояния изгиба у гибкого устройства, когда гибкое устройство изгибается, а затем разгибается в направлении, противоположном направлению, в котором изгибается гибкое устройство, в пределах предварительно определенного времени.
[12] В соответствии с аспектом настоящего раскрытия изобретения, когда первая изгибающая манипуляция выполняется в первом направлении, в котором центральная область гибкого устройства гнется вверх или вниз, а вторая изгибающая манипуляция выполняется на краевой области гибкого устройства во втором направлении, которое противоположно первому направлению, в пределах предварительно определенного времени, контроллер может осуществлять управление для поддержки состояния изгиба у гибкого устройства.
[13] В соответствии с аспектом настоящего раскрытия изобретения, когда вводится команда освобождения и при этом гибкое устройство изогнуто, контроллер может управлять приспособлением удержания изгиба для возврата гибкого устройства к плоскому состоянию.
[14] В соответствии с аспектом настоящего раскрытия изобретения команда освобождения может вводиться с помощью по меньшей мере одной из манипуляции кнопкой для выбора кнопки, предусмотренной на корпусе гибкого устройства, и изгибающей манипуляции для изгиба предварительно определенной области гибкого устройства.
[15] В соответствии с аспектом настоящего раскрытия изобретения гибкое устройство может дополнительно включать в себя сгибаемый дисплей, и когда гибкое устройство зафиксировано, контроллер может разделить область отображения у сгибаемого дисплея на множество областей отображения в соответствии с состоянием изгиба у гибкого устройства и может отобразить экран на каждой из множества областей отображения.
[16] В соответствии с другим аспектом настоящего раскрытия изобретения предоставляется способ управления гибким устройством. Способ включает в себя обнаружение изгиба гибкого устройства и управление для поддержки состояния изгиба у гибкого устройства, когда принимается предварительно определенный ввод, пока гибким устройством манипулируют.
[17] В соответствии с аспектом настоящего раскрытия изобретения управление может включать в себя сохранение информации, относящейся к состоянию изгиба у гибкого устройства, и управление для поддержки состояния изгиба у гибкого устройства с использованием сохраненной информации, когда принимается предварительно определенный ввод.
[18] В соответствии с аспектом настоящего раскрытия изобретения информация, относящаяся к состоянию изгиба, может включать в себя по меньшей мере одно из области изгиба, угла изгиба и направления изгиба у гибкого устройства.
[19] В соответствии с аспектом настоящего раскрытия изобретения управление для поддержки состояния изгиба у гибкого устройства может включать в себя управление для поддержки состояния изгиба у гибкого устройства, когда гибкое устройство изгибается, а затем разгибается в направлении, противоположном направлению, в котором изгибается гибкое устройство, в пределах предварительно определенного времени.
[20] В соответствии с аспектом настоящего раскрытия изобретения управление для поддержки состояния изгиба у гибкого устройства может включать в себя управление для поддержки состояния изгиба у гибкого устройства, когда первая изгибающая манипуляция выполняется в первом направлении, в котором центральная область гибкого устройства гнется вверх или вниз, а вторая изгибающая манипуляция выполняется на краевой области гибкого устройства во втором направлении, которое противоположно первому направлению, в пределах предварительно определенного времени.
[21] В соответствии с аспектом настоящего раскрытия изобретения управление для поддержки состояния изгиба у гибкого устройства может включать в себя управление для возврата гибкого устройства к плоскому состоянию, когда вводится команда освобождения и при этом гибкое устройство изогнуто.
[22] В соответствии с аспектом настоящего раскрытия изобретения команда освобождения может вводиться с помощью по меньшей мере одной из манипуляции кнопкой для выбора кнопки, предусмотренной на корпусе гибкого устройства, и изгибающей манипуляции для изгиба предварительно определенной области гибкого устройства.
[23] В соответствии с аспектом настоящего раскрытия изобретения гибкое устройство может включать в себя сгибаемый дисплей, и управление для поддержки состояния изгиба у гибкого устройства может включать в себя разделение области отображения у сгибаемого дисплея на множество областей отображения в соответствии с состоянием изгиба у гибкого устройства и отображение экрана на каждой из множества областей отображения, когда гибкое устройство зафиксировано.
Положительные эффекты изобретения
[24] В соответствии с различными вариантами осуществления из настоящего раскрытия изобретения, которые описаны выше, пользователь может удерживать состояние изгиба у гибкого устройства с использованием манипуляции, которую легко выполнять.
[25] Другие аспекты, преимущества и характерные признаки раскрытия изобретения станут ясны специалистам в данной области техники из нижеследующего подробного описания изобретения, которое в сочетании с приложенными чертежами раскрывает различные варианты осуществления из настоящего раскрытия изобретения.
Краткое описание чертежей
[26] Вышеупомянутые и другие аспекты, признаки и преимущества некоторых вариантов осуществления из настоящего раскрытия изобретения станут более ясными из нижеследующего описания в сочетании с прилагаемыми чертежами, на которых:
[27] Фиг. 1 - блок-схема, иллюстрирующая конфигурацию гибкого устройства в соответствии с вариантом осуществления из настоящего раскрытия изобретения;
[28] Фиг. 2A, 2B, 2C, 2D, 3A, 3B и 4 - изображения для иллюстрации примера способа обнаружения изгиба гибкого устройства в соответствии с вариантом осуществления из настоящего раскрытия изобретения;
[29] Фиг. 5A, 5B и 5C - изображения для иллюстрации способа обнаружения направления изгиба с использованием перекрывающихся датчиков изгиба в соответствии с вариантом осуществления из настоящего раскрытия изобретения;
[30] Фиг. 6A и 6B - изображения для иллюстрации способа обнаружения направления изгиба в соответствии с вариантом осуществления из настоящего раскрытия изобретения;
[31] Фиг. 7A и 7B - изображения для иллюстрации способа удержания состояния изгиба у гибкого устройства в соответствии с вариантом осуществления из настоящего раскрытия изобретения;
[32] Фиг. 8, 9, 10 и 11 - изображения для иллюстрации примера манипуляции пользователя для удержания состояния изгиба у гибкого устройства в соответствии с вариантом осуществления из настоящего раскрытия изобретения;
[33] Фиг. 12 - блок-схема для иллюстрации подробной конфигурации гибкого устройства в соответствии с вариантом осуществления из настоящего раскрытия изобретения;
[34] Фиг. 13 - изображение для иллюстрации конфигурации дисплея, который составляет гибкое устройство в соответствии с вариантом осуществления из настоящего раскрытия изобретения;
[35] Фиг. 14 - изображение для иллюстрации иерархии программного обеспечения, которое хранится в запоминающем устройстве в соответствии с вариантом осуществления из настоящего раскрытия изобретения;
[36] Фиг. 15A и 15B - изображения для иллюстрации способа обеспечения обратной связи у гибкого устройства в соответствии с вариантом осуществления из настоящего раскрытия изобретения;
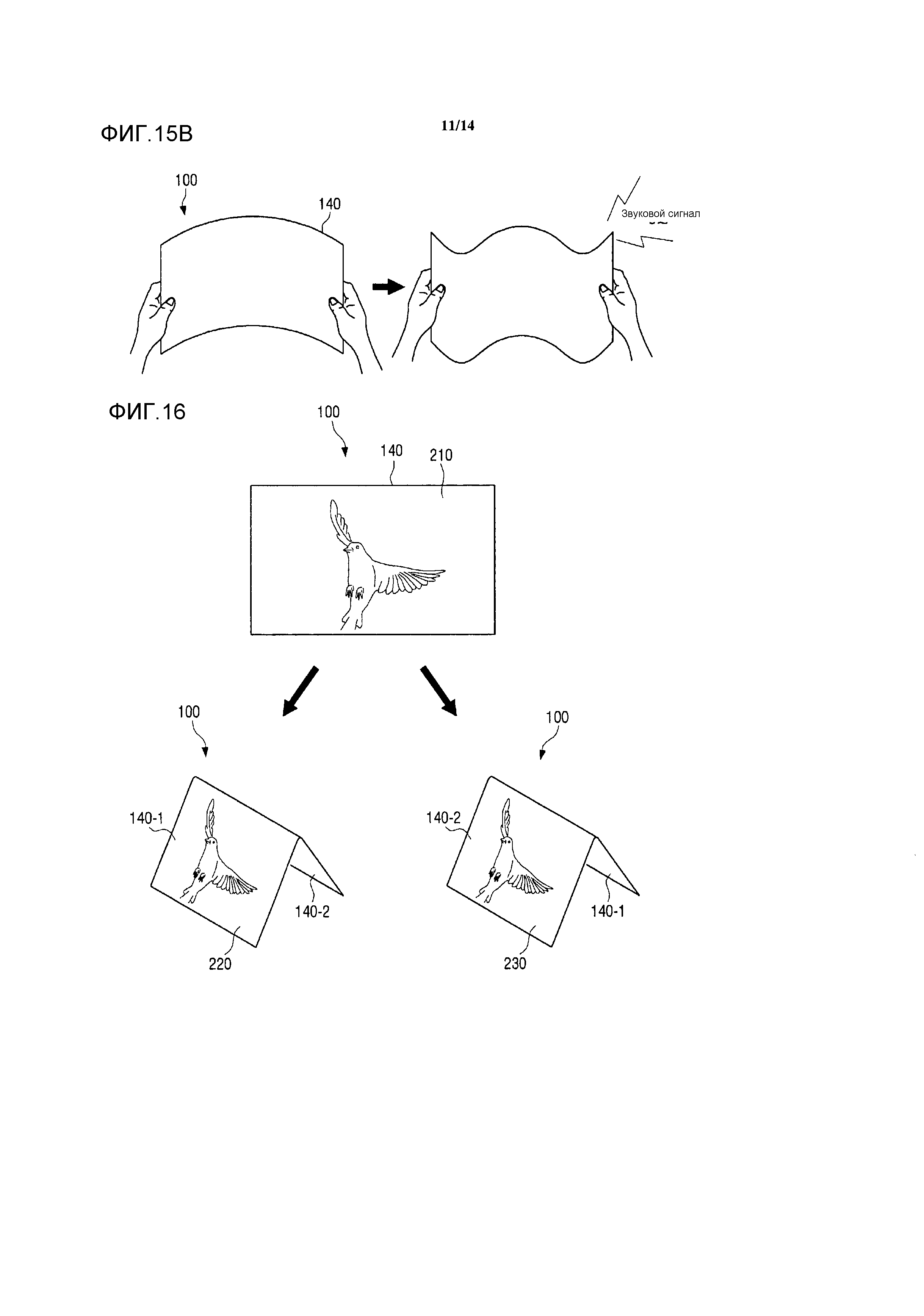
[37] Фиг. 16, 17 и 18 - изображения для иллюстрации способа отображения экрана, когда гибкое устройство зафиксировано в состоянии изгиба в соответствии с вариантом осуществления из настоящего раскрытия изобретения;
[38] Фиг. 19 - изображение для иллюстрации примера формы гибкого устройства в соответствии с вариантом осуществления из настоящего раскрытия изобретения;
[39] Фиг. 20 - изображение для иллюстрации примера формы гибкого устройства в соответствии с вариантом осуществления из настоящего раскрытия изобретения; и
[40] Фиг. 21 - блок-схема алгоритма для иллюстрации способа управления гибким устройством в соответствии с вариантом осуществления из настоящего раскрытия изобретения.
[41] На всех чертежах следует отметить, что одинаковые номера ссылок используются для изображения одинаковых или аналогичных элементов, признаков и структур.
Наилучший вариант осуществления изобретения
[42] -
Вариант осуществления изобретения
[43] Нижеследующее описание со ссылкой на прилагаемые чертежи предоставляется для содействия комплексному пониманию различных вариантов осуществления из настоящего раскрытия изобретения, которое задано формулой изобретения и ее эквивалентами. Оно включает в себя различные специальные подробности для помощи в понимании, но эти подробности должны рассматриваться всего лишь как типовые. Соответственно, специалисты в данной области техники должны понимать, что можно создать различные изменения и модификации различных вариантов осуществления, описанных в этом документе, без отклонения от объема и сущности настоящего раскрытия изобретения. К тому же описания общеизвестных функций и конструкций для ясности и краткости можно пропустить.
[44] Термины и слова, используемые в нижеследующем описании и формуле изобретения, не ограничиваются библиографическими значениями, а всего лишь используются автором изобретения для обеспечения четкого и согласованного понимания настоящего раскрытия изобретения. Соответственно, специалистам в данной области техники должно быть ясно, что нижеследующее описание различных вариантов осуществления из настоящего раскрытия изобретения предоставляется только с целью иллюстрации, а не с целью ограничения настоящего раскрытия изобретения, которое задано прилагаемой формулой изобретения и ее эквивалентами.
[45] Нужно понимать, что формы единственного числа включают в себя множественные объекты ссылки, пока контекст явно не предписывает иное. Таким образом, например, ссылка на "поверхность компонента" включает в себя ссылку на одну или несколько таких поверхностей.
[46] Фиг. 1 - блок-схема, иллюстрирующая конфигурацию гибкого устройства в соответствии с вариантом осуществления из настоящего раскрытия изобретения.
[47] Ссылаясь на фиг. 1, гибкое устройство 100 включает в себя датчик 110, приспособление 120 удержания изгиба и контроллер 130.
[48] В соответствии с различными вариантами осуществления из настоящего раскрытия изобретения гибкое устройство 100 из фиг. 1 можно реализовать с использованием различных типов устройств, которые можно легко переносить и которые имеют функцию отображения, например мобильного телефона, включая смартфон, портативного мультимедийного проигрывателя (PMP), персонального цифрового помощника (PDA), портативной игровой приставки, планшетного ПК и навигационной системы, и/или т.п. Также гибкое устройство 100 в дополнение к портативному устройству можно реализовать с использованием устройства стационарного типа, например монитора, телевизора (ТВ), киоска и/или т.п.
[49] Гибкое устройство 100 можно изготовить из гибкого материала, так что гибкое устройство 100 можно изгибать с помощью внешней силы и посредством этого изменять его форму. Гибкое устройство 100 может обнаруживать изгиб в соответствии с различными способами. Ниже способ для обнаружения изгиба гибкого устройства 100 будет объясняться со ссылкой на фиг. 2A-4.
[50] Фиг. 2A, 2B, 2C, 2D, 3A, 3B и 4 - изображения для иллюстрации примера способа обнаружения изгиба гибкого устройства в соответствии с вариантом осуществления из настоящего раскрытия изобретения.
[51] Ссылаясь на фиг. 2A, 2B, 2C, 2D, 3A, 3B и 4, датчик 110 обнаруживает изгиб гибкого устройства 100. Упомянутый в этом документе изгиб относится к состоянию, в котором гибкое устройство 100 изгибается.
[52] Чтобы обнаружить изгиб гибкого устройства 100, датчик 110 может включать в себя датчик изгиба, который располагается на одной поверхности, например передней поверхности или задней поверхности гибкого устройства 100, или датчик изгиба, который располагается на противоположных поверхностях гибкого устройства 100.
[53] Упомянутый в этом документе датчик изгиба относится к датчику, который можно изгибать и который имеет значение сопротивления, которое меняется в соответствии со степенью изгиба. Датчик изгиба можно реализовать в различных видах, например волоконно-оптический датчик изгиба, датчик давления, тензометр и/или т.п.
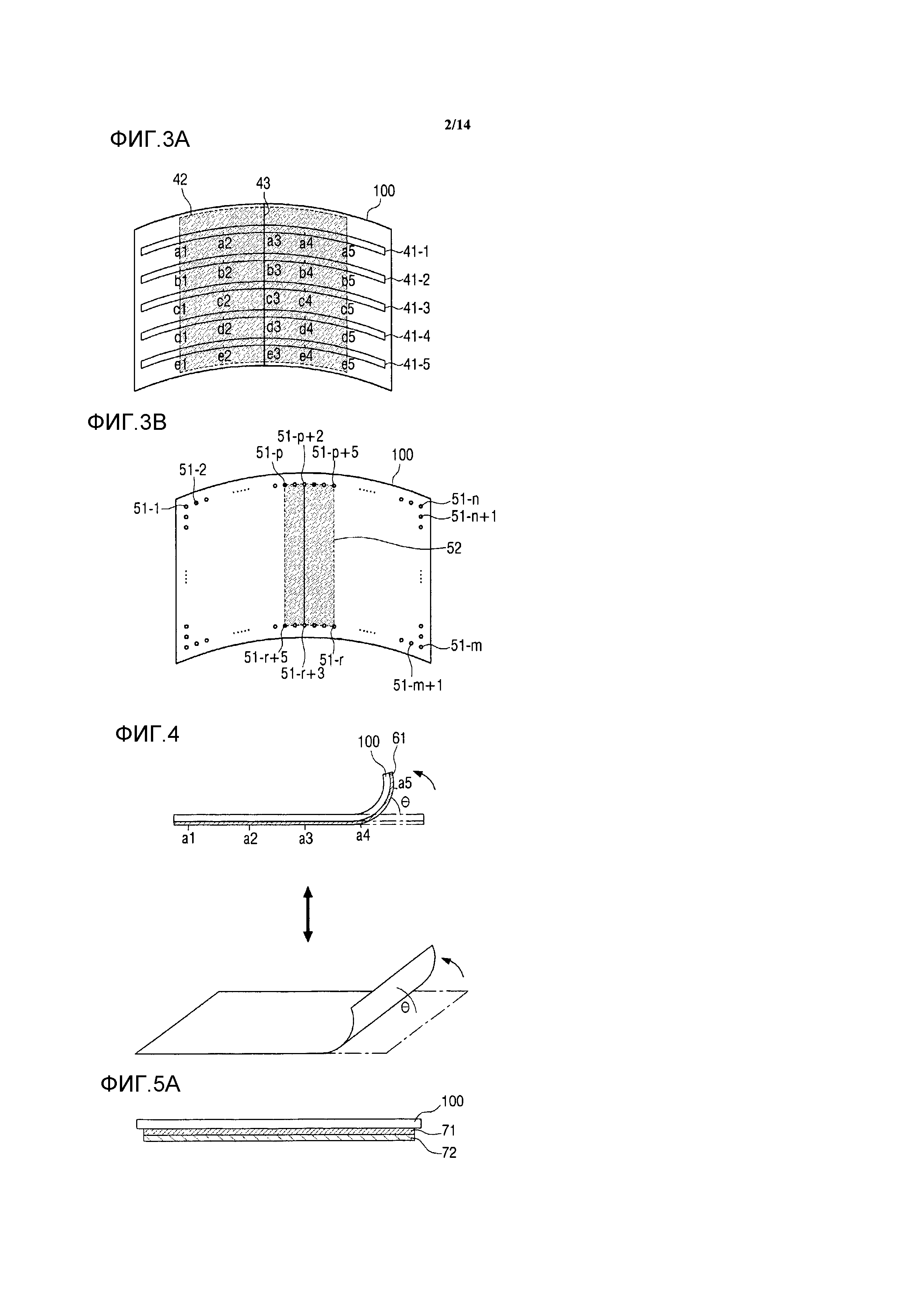
[54] Ссылаясь на фиг. 2A-2D, предоставляются изображения, иллюстрирующие шаблон, по которому размещаются датчики изгиба в соответствии с вариантом осуществления из настоящего раскрытия изобретения.
[55] Фиг. 2A иллюстрирует пример множества датчиков изгиба в форме полос, которые размещаются в гибком устройстве 100 в вертикальном направлении и горизонтальном направлении в виде сетки. В частности, датчик изгиба включает в себя датчики изгиба с 11-1 по 11-5, которые размещаются в первом направлении, и датчики изгиба с 12-1 по 12-5, которые размещаются во втором направлении, которое перпендикулярно первому направлению. Датчики изгиба располагаются на предварительно определенном расстоянии друг от друга.
[56] Как проиллюстрировано на фиг. 2A, пять датчиков изгиба (с 11-1 по 11-5, 12-1 или 12-5) размещаются в каждом из горизонтального направления и вертикального направления в сетчатой структуре. Однако такая конфигурация является лишь примером, и количество датчиков изгиба и длины датчиков изгиба можно менять в соответствии с размером гибкого устройства 100. Датчики изгиба размещаются в горизонтальном направлении и вертикальном направлении для обнаружения изгиба по всей площади гибкого устройства 100. Поэтому, когда гибкой является только часть гибкого устройства, или когда гибкому устройству нужно обнаружить изгиб только части устройства, датчик изгиба может размещаться только в соответствующей части устройства.
[57] Ссылаясь на фиг. 2A, датчик изгиба встраивается в переднюю поверхность гибкого устройства 100. Однако такая конфигурация является лишь примером, и датчик изгиба может встраиваться в заднюю поверхность гибкого устройства 100 или может встраиваться в противоположные поверхности.
[58] К тому же в соответствии с различными вариантами осуществления из настоящего раскрытия изобретения форма, количество и местоположение датчиков изгиба могут меняться различным образом. Например, гибкое устройство 100 может включать в себя одиночный датчик изгиба или множество датчиков изгиба, которые подключаются друг к другу. Одиночный датчик изгиба может обнаруживать одни данные изгиба, но может включать в себя множество каналов обнаружения, чтобы обнаруживать множество данных изгиба.
[59] Фиг. 2B иллюстрирует пример одиночного датчика изгиба, который располагается на одной поверхности гибкого устройства 100. Ссылаясь на фиг. 2B, датчик 21 изгиба может располагаться на передней поверхности гибкого устройства 100 в виде круга. Однако такая конфигурация является лишь примером, и датчик изгиба может располагаться на задней поверхности гибкого устройства 100, и его можно реализовать в виде замкнутой кривой, образующей различные многоугольники, например четырехугольник.
[60] Фиг. 2C иллюстрирует два датчика изгиба, которые пересекаются. Ссылаясь на фиг. 2C, первый датчик 22 изгиба располагается на первой поверхности гибкого устройства 100 в первом диагональном направлении, а второй датчик 23 изгиба располагается на второй поверхности гибкого устройства 100 во втором диагональном направлении.
[61] Хотя в различных вышеописанных вариантах осуществления из настоящего раскрытия изобретения используются линейные датчики изгиба, датчик 110 может обнаруживать изгиб с использованием множества тензометров.
[62] Фиг. 2D иллюстрирует множество тензометров с 30-1 по 30-m, которые размещаются в гибком устройстве 100. Тензометр использует металл или полупроводник, сопротивление которого изменяется в соответствии с приложенной силой, и обнаруживает деформацию поверхности объекта, который нужно измерить, в соответствии с изменением значения сопротивления. Общепринято, что материал, например металл, увеличивает значение сопротивления, когда длина такого материала увеличивается с помощью внешней силы, и уменьшает значение сопротивления, когда его длина уменьшается. Соответственно, путем обнаружения изменения значения сопротивления можно выполнить определение относительно того, выполняется ли (например, возникает) изгиб.
[63] Ссылаясь на фиг. 2D, множество тензометров размещается по краю гибкого устройства 100. Количество тензометров может меняться в соответствии с размером и формой гибкого устройства 100.
[64] Ниже будет объясняться способ, которым датчик 110 обнаруживает изгиб гибкого устройства 100 с использованием датчиков изгиба, которые размещаются в виде сетки, или тензометров.
[65] Датчики изгиба можно реализовать с использованием датчика электрического сопротивления, который использует электрическое сопротивление, или волоконно-оптического микродатчика, который использует натяжение оптического волокна. Ниже будет объясняться датчик изгиба при допущении для удобства объяснения, что датчик изгиба является датчиком электрического сопротивления.
[66] Фиг. 3A и 3B - изображения для иллюстрации способа обнаружения изгиба гибкого устройства в соответствии с вариантом осуществления из настоящего раскрытия изобретения.
[67] Со ссылкой на фиг. 3A и 3B, когда изгибается гибкое устройство 100, также изгибаются датчики изгиба, которые размещаются на одной поверхности или противоположных поверхностях гибкого устройства 100. В результате датчики изгиба выводят значения сопротивления, соответствующие величине вызванного натяжения.
[68] Например, датчик 110 обнаруживает значение сопротивления у датчика изгиба, используя уровень напряжения, приложенного к датчику изгиба, или величину электрического тока, текущего в датчик изгиба, и обнаруживает изгиб гибкого устройства 100 с использованием этого значения сопротивления.
[69] Например, когда гибкое устройство 100 изгибается в горизонтальном направлении, как показано на фиг. 3A, также изгибаются датчики изгиба с 41-1 по 41-5, которые встраиваются в переднюю поверхность гибкого устройства 100. Следовательно, датчики изгиба с 41-1 по 41-5 выводят значения сопротивления в соответствии с величиной вызванного натяжения.
[70] В этом случае величина натяжения увеличивается пропорционально степени изгиба. Когда гибкое устройство 100 изгибается, как показано на фиг. 3A, наибольший изгиб возникает в центральной области. Соответственно, наибольшее натяжение вызывается в центральных точках a3, b3, c3, d3 и e3 у датчиков 41-1, 41-2, 41-3, 41-4 и 41-5 изгиба, и соответственно, датчики изгиба с 41-1 по 41-5 имеют наибольшее значение сопротивления в точках a3, b3, c3, d3 и e3.
[71] В отличие от этого степень изгиба постепенно уменьшается к наружной части. Соответственно, датчик 41-1 изгиба имеет меньшие значения сопротивления в положениях, все более отдаленных от точки a3 влево и вправо. Точка a1 и ее левая область и точка a5 и ее правая область, в которых не возникает изгиб, имеют такие же значения, как и раньше. То же самое применяется к другим датчикам изгиба с 41-2 по 41-5 и соответствующим точкам с b1 по b5, c1 по c5, d1 по d5 и e1 по e5.
[72] Контроллер 130 может определить изгиб гибкого устройства 100 на основе результата обнаружения с помощью датчика 110. В частности, контроллер 130 может определить местоположение области изгиба, размер области изгиба, количество областей изгиба, размер линии изгиба, местоположение линии изгиба, количество линий изгиба, направление линии изгиба, количество раз, которое возникает изгиб, и/или т.п. на основе отношения между точками, в которых обнаруживается изменение значения сопротивления.
[73] Область изгиба является областью, в которой изгибается гибкое устройство отображения. В частности, поскольку датчик изгиба также может изгибаться при изгибе гибкого устройства 100, все точки, в которых датчики изгиба выводят отличные значения сопротивления от первоначальных значений, могут изображать область изгиба. Область, на которой не происходит никакого изменения значения сопротивления, может изображаться в качестве плоской области, на которой не возникает изгиб.
[74] Когда расстояние между точками, в которых обнаруживается изменение значения сопротивления, находится в пределах предварительно определенного расстояния, датчик 110 обнаруживает точки в виде одной области изгиба. С другой стороны, когда расстояние между точками, в которых обнаруживается изменение значения сопротивления, находится вне предварительно определенного расстояния, датчик 110 изображает разные области изгиба относительно этих точек.
[75] Как описано выше, на фиг. 3A значения сопротивления от точек a1-a5 датчика 41-1 изгиба, от точек b1-b5 датчика 41-2 изгиба, от точек c1-c5 датчика 41-3 изгиба, от точек d1-d5 датчика 41-4 изгиба и от точек e1-e5 датчика 41-5 изгиба отличаются от значений сопротивления в первоначальном состоянии. В этом случае точки, в которых обнаруживается изменение значения сопротивления в каждом датчике изгиба с 41-1 по 41-5, располагаются на предварительно определенном расстоянии и размещаются непрерывно.
[76] Соответственно, контроллер 130 определяет область 42, которая включает в себя все эти точки из точек a1-a5 датчика 41-1 изгиба, из точек b1-b5 датчика 41-2 изгиба, из точек c1-c5 датчика 41-3 изгиба, из точек d1-d5 датчика 41-4 изгиба и из точек e1-e5 датчика 31-5 изгиба, в качестве одной области изгиба.
[77] Область изгиба может включать в себя линию изгиба. Линия изгиба относится к линии, которая соединяет точки, в которых обнаруживается наибольшее значение сопротивления в каждой области изгиба. Соответственно, контроллер 130 может определить линию, которая соединяет точки, в которых обнаруживается наибольшее значение сопротивления в области изгиба, в качестве линии изгиба.
[78] Например, в случае фиг. 3A линия 43 в области 42 изгиба, которая соединяет точку a3, в которой наибольшее значение сопротивления выводится в датчике 41-1 изгиба, точку b3, в которой наибольшее значение сопротивления выводится в датчике 41-2 изгиба, точку c3, в которой наибольшее значение сопротивления выводится в датчике 41-3 изгиба, точку d3, в которой наибольшее значение сопротивления выводится в датчике 41-4 изгиба, и точку e3, в которой наибольшее значение сопротивления выводится в датчике 41-5 изгиба, может изображаться в качестве линии изгиба. Фиг. 3A иллюстрирует линию изгиба, которая образуется в центральной области поверхности дисплея в вертикальном направлении.
[79] Фиг. 3A иллюстрирует только датчики изгиба, которые размещаются в горизонтальном направлении среди датчиков изгиба в виде сетки, чтобы объяснить изгиб гибкого устройства 100 в горизонтальном направлении. Например, датчик 110 может обнаруживать изгиб гибкого устройства 100 в вертикальном направлении, используя такой же способ, как и изгиб в горизонтальном направлении, посредством датчиков изгиба, которые размещаются в вертикальном направлении. К тому же, когда гибкое устройство 100 изгибается в диагональном направлении, натяжение вызывается во всех датчиках изгиба, которые размещаются в горизонтальном направлении и вертикальном направлении. Поэтому датчик 110 может обнаруживать изгиб гибкого устройства 100 в диагональном направлении на основе выходных значений датчиков изгиба, которые размещаются в горизонтальном и вертикальном направлениях.
[80] В отличие от этого, в соответствии с различными вариантами осуществления из настоящего раскрытия изобретения датчик 110 может обнаруживать изгиб гибкого устройства 100 с использованием тензометра.
[81] В частности, когда гибкое устройство 100 изгибается, сила прикладывается к тензометру, который размещается по краю гибкого устройства 100, и разное значение сопротивления выводится из тензометра в соответствии с величиной приложенной силы. Соответственно, контроллер 130 может определить местоположение области изгиба, размер области изгиба, количество областей изгиба, размер линии изгиба, местоположение линии изгиба, количество линий изгиба, направление линии изгиба, количество раз, которое возникает изгиб, и/или т.п. на основе выходного значения тензометра.
[82] Например, как проиллюстрировано на фиг. 3B, когда гибкое устройство 100 изгибается в горизонтальном направлении, сила прикладывается к тензометрам 51-p, …, 51-p+5 и 51-r, …, 51-r+5, которые размещаются в области изгиба среди множества тензометров, которые встраиваются в переднюю поверхность гибкого устройства 100. В результате множество тензометров выводит значение сопротивления в соответствии с величиной приложенной силы. Соответственно, контроллер 130 определяет область 52, которая включает в себя все точки, в которых тензометры выводят отличные значения сопротивления от значений в первоначальном состоянии, в качестве одной области изгиба. К тому же, когда расстояние между точками тензометров, в которых обнаруживается изменение значения сопротивления, находится вне предварительно определенного расстояния, контроллер 130 изображает разные области изгиба относительно таких точек.
[83] Контроллер 130 может определить линию, которая соединяет точки, в которых тензометры выводят значения сопротивления, значительно отличающиеся от значений в первоначальном состоянии в области изгиба, в качестве линии изгиба. Например, контроллер 130 в качестве линии изгиба может определить линию, которая соединяет по меньшей мере два тензометра, к которым прикладывается наибольшая сила, или по меньшей мере два тензометра, к которым прикладывается следующая наибольшая сила, в соответствии с изгибом гибкого устройства 100.
[84] Например, когда гибкое устройство 100 изгибается в горизонтальном направлении, как показано на фиг. 3B, контроллер 130 может определить линию, которая соединяет первый тензометр 51-p+2 и второй тензометр 51-r+3, которые выводят значения сопротивления, значительно отличающиеся от значений в первоначальном состоянии, в качестве линии изгиба.
[85] В вышеописанном варианте осуществления тензометры 51-1, 51-2, … встраиваются в переднюю поверхность гибкого устройства 100. Тензометры 51-1, 51-2, … могут встраиваться в переднюю поверхность гибкого устройства 100, чтобы обнаруживать изгиб гибкого устройства 100 в направлении Z+.
[86] Направление изгиба у гибкого устройства 100 относится к направлению, в котором гнется изогнутое гибкое устройство 100. Например, при допущении, что передняя поверхность гибкого устройства 100 является 2-мерной плоскостью x-y, когда изогнутое гибкое устройство 100 гнется в направлении z- оси z, которая перпендикулярна плоскости x-y, направлением изгиба у гибкого устройства 100 является направление Z+, а когда изогнутое гибкое устройство 100 гнется в направлении z+ оси z, направлением изгиба у гибкого устройства является направление Z-.
[87] Соответственно, тензометры могут встраиваться в заднюю поверхность гибкого устройства 100, чтобы обнаруживать изгиб гибкого устройства 100 в направлении Z-. Однако такая конфигурация является лишь примером, и тензометры могут встраиваться в одну поверхность гибкого устройства 100, чтобы обнаруживать изгиб в направлении Z+ и направлении Z-.
[88] Датчик 120 может обнаруживать степень изгиба у гибкого устройства 100, например, угол изгиба. Угол изгиба относится к углу, который находится между углом, когда гибкое устройство 100 находится в плоском состоянии, и углом, когда гибкое устройство 100 изгибается.
[89] Фиг. 4 - изображение для иллюстрации способа определения угла изгиба у гибкого устройства в соответствии с вариантом осуществления из настоящего раскрытия изобретения.
[90] Ссылаясь на фиг. 4, контроллер 130 может определить угол изгиба у гибкого устройства 100 на основе результата обнаружения с помощью датчика 120. Чтобы добиться этого, гибкое устройство 100 может заранее сохранить значения сопротивления, которые выводятся с линии изгиба, в соответствии с углом изгиба. Соответственно, контроллер 130 сравнивает значения сопротивления, которые выводятся из датчиков изгиба или тензометров, расположенных на линии изгиба, когда гибкое устройство 100 изгибается, с предварительно сохраненными значениями сопротивления и определяет угол изгиба, соответствующий обнаруженным значениям сопротивления.
[91] Например, когда гибкое устройство 100 изгибается, как показано на фиг. 4, точка a4 датчика изгиба, которая располагается на линии изгиба, выводит наибольшее значение сопротивления. В то же время контроллер 130 может определить угол θ изгиба, соответствующий значению сопротивления, выведенному из точки a4, используя значения сопротивления, которые предварительно сохраняются в соответствии с углами изгиба.
[92] Как описано выше, направление изгиба у гибкого устройства 100 можно разделить на направление Z+ или направление Z-. Датчик 120 может обнаруживать направление изгиба у гибкого устройства 100 различными способами. Подробное описание предоставляется со ссылкой на фиг. 5 и 6.
[93] Фиг. 5A, 5B и 5C - изображения для иллюстрации способа обнаружения направления изгиба с использованием перекрывающихся датчиков изгиба в соответствии с вариантом осуществления из настоящего раскрытия изобретения.
[94] Ссылаясь на фиг. 5A, 5B и 5C, контроллер 130 может определить направление изгиба у гибкого устройства 100 на основе результата обнаружения с помощью датчика 120. Чтобы добиться этого, датчик 120 может включать в себя датчик изгиба.
[95] Например, как показано на фиг. 5A, датчик 120 может включать в себя два датчика 71 и 72 изгиба, которые располагаются перекрывающими друг друга на одной стороне гибкого устройства 100. В этом случае, когда изгиб выполняется в одном направлении, разные значения сопротивления выводятся из верхнего датчика 71 изгиба и нижнего датчика 72 изгиба в точке, в которой выполняется изгиб. Соответственно, направление изгиба можно определить путем сравнения значений сопротивления у двух датчиков 71 и 72 изгиба в одной и той же точке.
[96] В частности, когда гибкое устройство 100 изгибается в направлении Z+, как показано на фиг. 5B, натяжение, вызванное в нижнем датчике 72 изгиба, больше такового у верхнего датчика 71 изгиба в точке "A", соответствующей линии изгиба. В отличие от этого, когда гибкое устройство 100 изгибается в направлении Z-, натяжение, вызванное в верхнем датчике 71 изгиба, больше такового у нижнего датчика 72 изгиба.
[97] Соответственно, контроллер 130 может обнаружить направление изгиба путем сравнения значений сопротивления у двух датчиков 71 и 72 изгиба в точке A. Например, когда значение сопротивления, выведенное из нижнего датчика изгиба среди двух перекрывающихся датчиков изгиба, больше такового у верхнего датчика изгиба в той же точке, контроллер 130 может определить, что гибкое устройство изгибается в направлении Z+. К тому же, когда значение сопротивления, выведенное из верхнего датчика изгиба среди двух перекрывающихся датчиков изгиба, больше такового у нижнего датчика изгиба в той же точке, контроллер 130 может определить, что гибкое устройство изгибается в направлении Z-.
[98] Хотя два датчика изгиба располагаются перекрывающими друг друга на одной стороне гибкого устройства 100 на фиг. 5A и 5B, датчики изгиба могут располагаться на противоположных поверхностях гибкого устройства 100, как показано на фиг. 5C.
[99] Фиг. 5C иллюстрирует два датчика 73 и 74 изгиба, которые располагаются на противоположных поверхностях гибкого устройства 100.
[100] Ссылаясь на фиг. 5C, когда гибкое устройство 100 изгибается в направлении Z+, датчик изгиба, который располагается на первой поверхности из противоположных поверхностей гибкого устройства 110, подвергается действию сжимающей силы, тогда как датчик изгиба, который располагается на второй поверхности, подвергается натяжению. В отличие от этого, когда гибкое устройство 100 изгибается в направлении Z-, датчик изгиба, расположенный на второй поверхности, подвергается действию сжимающей силы, тогда как датчик изгиба, расположенный на первой поверхности, подвергается натяжению. Как описано выше, от двух датчиков изгиба обнаруживаются разные значения в соответствии с направлением изгиба, и контроллер 130 определяет направление изгиба в соответствии с характеристикой обнаружения значения.
[101] Хотя направление изгиба обнаруживается с использованием двух датчиков изгиба на фиг. 5A-5C, направление изгиба может обнаруживаться посредством только тензометра, расположенного на одной поверхности или противоположных поверхностях гибкого устройства 100. Например, когда тензометры, встроенные в переднюю поверхность гибкого устройства 100, выводят отличные значения сопротивления от значений в первоначальном состоянии, контроллер 130 может определить, что гибкое устройство 100 изгибается в направлении Z+, а когда тензометры, встроенные в заднюю поверхность гибкого устройства 100, выводят отличные значения сопротивления от значений в первоначальном состоянии, контроллер 130 может определить, что гибкое устройство 100 изгибается в направлении Z-.
[102] Фиг. 6A и 6B - изображения для иллюстрации способа обнаружения направления изгиба в соответствии с другим вариантом осуществления из настоящего раскрытия изобретения.
[103] Со ссылкой на фиг. 6A и 6B иллюстрируются изображения для иллюстрации способа обнаружения направления изгиба с использованием датчика ускорения.
[104] Датчик 110 может включать в себя множество датчиков ускорения, которые располагаются на краевых областях гибкого устройства 100. Контроллер 130 может определить направление изгиба у гибкого устройства 100 на основе результата обнаружения с помощью датчика 120.
[105] Датчики ускорения могут измерять ускорение движения и направление ускорения. В частности, датчики ускорения выводят значение обнаружения, соответствующее ускорению свободного падения, которое изменяется в соответствии с наклоном устройства, куда прикреплены те датчики.
[106] Соответственно, когда датчики 81-1 и 81-2 ускорения располагаются на противоположных краях гибкого устройства 100, как показано на фиг. 6A, изменяются выходные значения, обнаруженные датчиками ускорения, когда изгибается гибкое устройство 100. Контроллер 130 вычисляет угол наклона и угол крена, используя выходные значения, обнаруженные датчиками 81-1 и 81-2 ускорения. Соответственно, контроллер 130 может определить направление изгиба на основе изменений угла наклона и угла крена, обнаруженных датчиками 81-1 и 81-2 ускорения.
[107] На фиг. 6A датчики 81-1 и 81-2 ускорения располагаются на противоположных краях в горизонтальном направлении относительно передней поверхности гибкого устройства 100. Однако датчики ускорения могут располагаться в вертикальном направлении, как показано на фиг. 6B. В этом случае, когда гибкое устройство 100 изгибается в вертикальном направлении, направление изгиба обнаруживается в соответствии со значениями измерения, обнаруженными датчиками 81-3 и 81-4 ускорения в вертикальном направлении.
[108] На фиг. 6A и 6B датчики ускорения располагаются на левом и правом краях или верхнем и нижнем краях гибкого устройства 100. Однако датчики ускорения могут располагаться на всех из левого, правого, верхнего и нижнего краев и/или могут располагаться по углам.
[109] Направление изгиба можно обнаружить с использованием, помимо датчика ускорения, гироскопа или геомагнитного датчика. Гироскоп относится к датчику, который, если возникает вращательное движение, обнаруживает угловую скорость путем измерения силы Кориолиса, приложенной в направлении скорости движения. На основе значения измерения от гироскопа можно обнаружить направление вращательного движения, и соответственно, также можно обнаружить направление изгиба. Геомагнитный датчик относится к датчику, который обнаруживает азимут с использованием 2-осевого или 3-осевого феррозонда. Когда применяется такой геомагнитный датчик, геомагнитный датчик, расположенный на каждом крае гибкого устройства 100, испытывает перемещение местоположения, когда край изгибается, и выводит электрический сигнал, соответствующий изменению геомагнетизма, вызванному перемещением местоположения. Контроллер 130 может вычислить угол рыскания, используя значение, выведенное из геомагнитного датчика. В соответствии с изменением в вычисленном угле рыскания можно определить различные характеристики изгиба, например область изгиба и направление изгиба.
[110] Как описано выше, контроллер 130 может определить изгиб гибкого устройства 100 на основе результата обнаружения с помощью датчика 110. Вышеописанные конфигурации датчиков и способов обнаружения могут применяться к гибкому устройству 100 по отдельности и могут применяться в сочетании.
[111] Приспособление 120 удержания изгиба удерживает состояние изгиба у гибкого устройства 100. Чтобы добиться этого, приспособление 120 удержания изгиба может включать в себя множество полимерных пленок, которые располагаются на предварительно определенной области гибкого устройства 100. Чтобы зафиксировать всю область гибкого устройства 100 в состоянии изгиба, множество полимерных пленок может располагаться на всей области гибкого устройства 100, а чтобы зафиксировать некоторые области гибкого устройства 100 в состоянии изгиба, множество полимерных пленок может располагаться на некоторых областях гибкого устройства 100.
[112] Контроллер 130 управляет общей работой гибкого устройства 100. В частности, контроллер 130 может определить изгиб гибкого устройства 100 на основе результата обнаружения с помощью датчика 110. В частности, контроллер 130 может определить изгиб/выпрямление гибкого устройства 100, местоположение области изгиба, местоположение области изгиба, размер области изгиба, количество областей изгиба, размер линии изгиба, местоположение линии изгиба, количество линий изгиба, направление изгиба, угол изгиба и количество раз, которое возникает изгиб, используя значения сопротивления, выведенные из датчиков изгиба или тензометров. Это описано выше со ссылкой на фиг. 2-6, и излишнее объяснение пропускается.
[113] Когда принимается предварительно определенный ввод, пока гибкое устройство 100 изгибается, контроллер 130 может управлять приспособлением 120 удержания изгиба для удержания состояния изгиба у гибкого устройства 100.
[114] В частности, когда гибкое устройство 100 изгибается, контроллер 130 сохраняет информацию о состоянии изгиба в гибком устройстве 100, а когда принимается предварительно определенный ввод, контроллер 130 осуществляет управление для удержания состояния изгиба у гибкого устройства 100, используя предварительно сохраненную информацию. Информация о состоянии изгиба может включать в себя по меньшей мере одно из области изгиба, угла изгиба и направления изгиба у гибкого устройства 100.
[115] Фиг. 7A и 7B - изображения для иллюстрации способа удержания состояния изгиба у гибкого устройства в соответствии с вариантом осуществления из настоящего раскрытия изобретения.
[116] Ссылаясь на фиг. 7A и 7B, и как описано выше, приспособление 120 удержания изгиба может включать в себя множество полимерных пленок. Полимерная пленка изготавливается из кремнийорганического или уретанового диэлектрического эластомера, и форма полимерной пленки может изменяться в соответствии с разностью потенциалов напряжений, приложенных к электродам, которые наносятся на одну сторону и другую сторону.
[117] Например, когда к полимерной пленке 121 прикладывается напряжение предварительно определенного уровня, как показано на фиг. 7A, верхняя часть полимерной пленки 121 сжимается, а нижняя часть растягивается. Соответственно, контроллер 130 прикладывает напряжение к полимерной пленке 121 и изменяет форму полимерной пленки 21, чтобы гибкое устройство 100 удерживалось в состоянии изгиба.
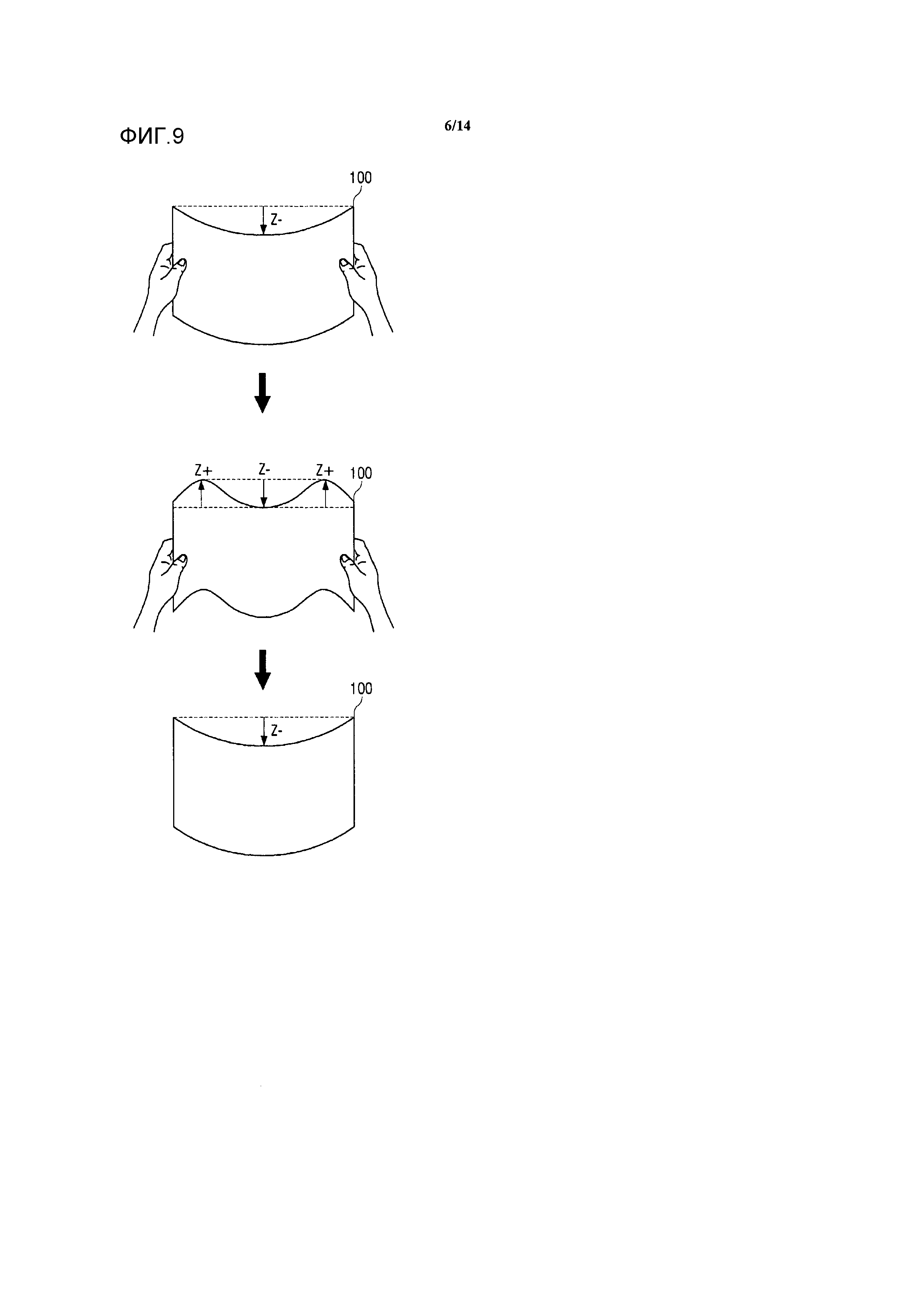
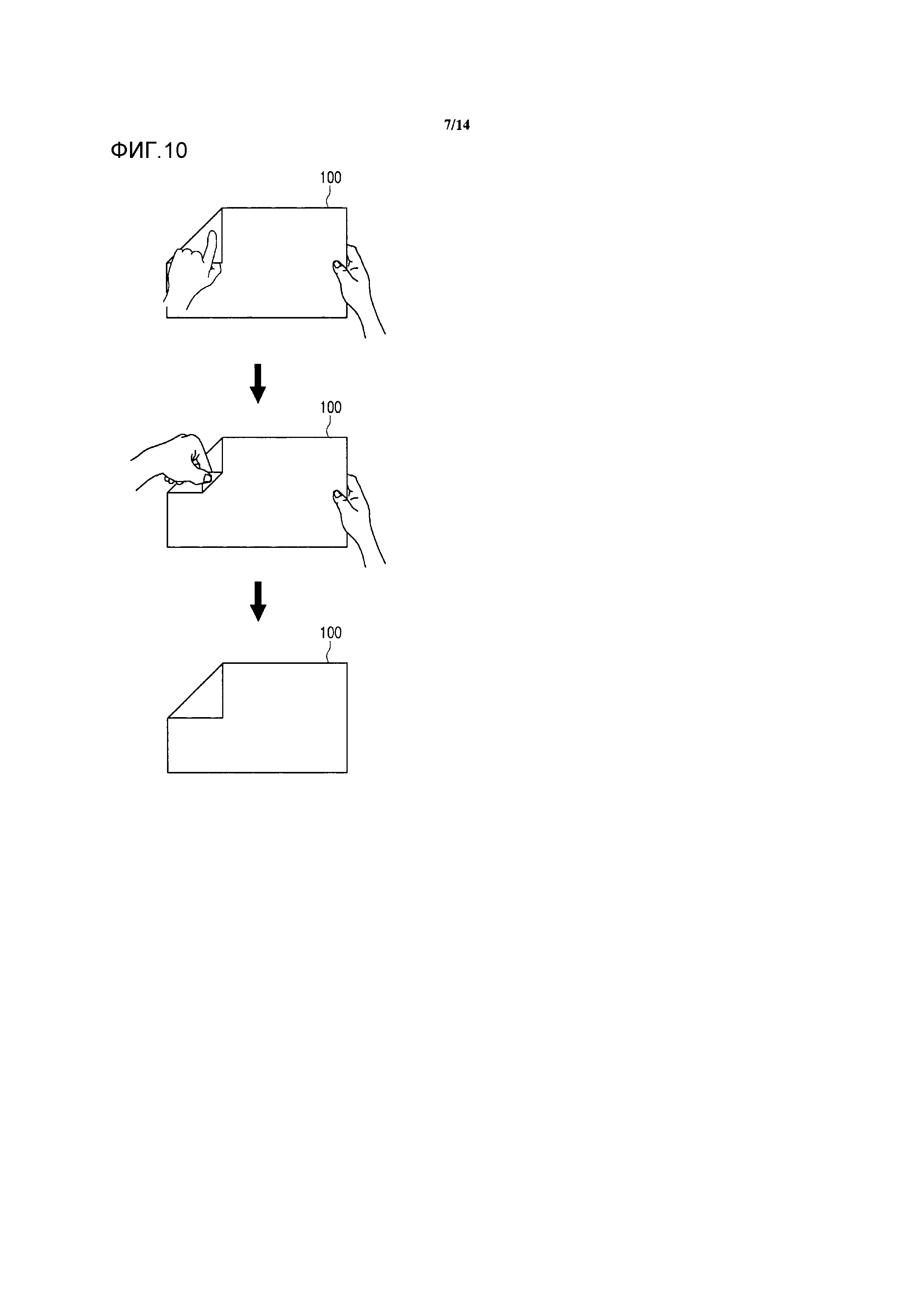
[118] Чтобы удержать гибкое устройство 100 в неизменном состояние, гибкое устройство 100 может предварительно сохранить информацию, относящуюся к тому, к какой из полимерных пленок, расположенных в гибком устройстве 100, прикладывается напряжение, величине напряжения, которое следует приложить к полимерной пленке, порядку, в котором напряжение прикладывается к полимерным пленкам, и/или т.п. (в дальнейшем все это называется управляющей информацией). Соответственно, контроллер 130 может приложить напряжение к полимерной пленке для удержания состояния изгиба у гибкого устройства 100, используя предварительно сохраненную управляющую информацию.
[119] В частности, когда гибкое устройство 100 изгибается, контроллер 130 определяет местоположение области изгиба, угол изгиба и направление изгиба на основе значений, обнаруженных датчиком 110, и сохраняет информацию об определенном состоянии изгиба в гибком устройстве 100.
[120] После этого, когда проводится манипуляция пользователя для удержания состояния изгиба у гибкого устройства 100, контроллер 130 определяет состояние изгиба у гибкого устройства 100 с использованием информации о состоянии изгиба. Состояние изгиба может включать в себя по меньшей мере одно из области изгиба, угла изгиба и направления изгиба у гибкого устройства 100.
[121] Контроллер 130 определяет местоположение полимерной пленки, к которой нужно приложить напряжение, чтобы удержать состояние изгиба у гибкого устройства 100, уровень напряжения, которое будет приложено, и порядок приложения напряжения, используя предварительно сохраненную управляющую информацию, и прикладывает соответствующее напряжение к полимерной пленке и осуществляет управление для удержания состояния изгиба у гибкого устройства 100.
[122] В качестве примера с пояснительными целями можно предположить, что левая сторона гибкого устройства 100 изгибается приблизительно на 45° в направлении Z+, как показано на фиг. 7B. В этом случае путем приложения напряжения предварительно определенного уровня к полимерным пленкам с 121-1 по 121-3, которые располагаются в области изгиба, контроллер 130 может осуществлять управление для удержания состояния, в котором левая сторона гибкого устройства 100 изгибается на 45° в направлении Z+. В отличие от этого, поскольку полимерные пленки 121-4 и 121-5 находятся вне области изгиба, напряжение к ним можно не прикладывать.
[123] В вышеописанном варианте осуществления из настоящего раскрытия изобретения предоставляется пять полимерных пленок. Однако такая конфигурация является лишь примером для удобства объяснения, и в соответствии с различными вариантами осуществления из настоящего раскрытия изобретения количество и размер полимерных пленок может меняться в соответствии с размером гибкого устройства 100.
[124] Также в вышеописанном варианте осуществления приспособление 120 удержания изгиба включает в себя полимерные пленки. Однако дополнительно или в качестве альтернативы приспособление 120 удержания изгиба может включать в себя струну, пьезоэлектрический элемент (например, последовательный биморфный пьезоэлектрический элемент или параллельный биморфный пьезоэлектрический элемент), электроактивный полимер (EAP), электромеханический полимер (EMP) и/или т.п. и может удерживать состояние изгиба у гибкого устройства 100.
[125] Например, когда приспособление 120 удержания изгиба включает в себя струну, контроллер 130 может удерживать состояние изгиба у гибкого устройства 100 путем изменения растягивающей силы струны. Например, когда форма гибкого устройства 100 изменяется с помощью внешней силы, гибкое устройство 100 подвергается действию силы обратного направления, чтобы вернуться к плоскому состоянию благодаря упругости гибкого устройства 100. В этом случае контроллер 130 предоставляет гибкому устройству 100 физическую силу, соответствующую силе обратного направления, посредством этого удерживая состояние изгиба у гибкого устройства 100.
[126] Манипуляция пользователя для удержания состояния изгиба у гибкого устройства 100 может проводиться различными способами.
[127] Например, когда гибкое устройство 100 изгибается в противоположном направлении к направлению изгиба у гибкого устройства 100 в пределах предварительно определенного времени в состоянии, в котором изгибается гибкое устройство 100, контроллер 130 может осуществлять управление для удержания состояния изгиба у гибкого устройства 100 с использованием предварительно сохраненной информации.
[128] Например, когда гибкое устройство 100 изгибается в направлении Z+, а затем изгибается в направлении Z- в пределах предварительно определенного времени в состоянии, в котором изгибается гибкое устройство 100, или когда гибкое устройство 100 изгибается в направлении Z-, а затем изгибается в направлении Z+ в пределах предварительно определенного времени в состоянии, в котором изгибается гибкое устройство 100, контроллер 130 может осуществлять управление для удержания состояния изгиба у гибкого устройства 100.
[129] Чтобы добиться этого, когда гибкое устройство 100 изгибается, а затем разгибается в пределах предварительно определенного времени, контроллер 130 может определить направление изгиба у разогнутого гибкого устройства 100. Когда направление изгиба у гибкого устройства 100 противоположно направлению изгиба у разогнутого гибкого устройства 100, контроллер 130 может управлять приспособлением 120 удержания изгиба для удержания состояния изгиба у гибкого устройства 100.
[130] Фиг. 8, 9, 10 и 11 - изображения для иллюстрации примера манипуляции пользователя для удержания состояния изгиба у гибкого устройства в соответствии с вариантом осуществления из настоящего раскрытия изобретения.
[131] Ссылаясь на фиг. 8, 9, 10 и 11, когда первая изгибающая манипуляция выполняется в первом направлении, в котором центральная область гибкого устройства 100 гнется вверх или вниз, а вторая изгибающая манипуляция выполняется на краевых областях гибкого устройства 100 во втором направлении, которое противоположно первому направлению, контроллер 130 может осуществлять управление для удержания состояния изгиба у гибкого устройства 100.
[132] Центральная область является областью предварительно определенного размера, которая включает в себя центр гибкого устройства 100. Краевая область может быть областью, которая исключает центральную область гибкого устройства 100.
[133] Например, как проиллюстрировано на фиг. 8, когда центральная область гибкого устройства 100 изгибается в направлении Z+, а левая краевая область и правая краевая область гибкого устройства 100 изгибаются в направлении Z-, контроллер 130 может осуществлять управление для удержания состояния изгиба, в котором центральная область гибкого устройства 100 изгибается в направлении Z+.
[134] К тому же, как проиллюстрировано на фиг. 9, когда центральная область гибкого устройства 100 изгибается в направлении Z-, а левая краевая область и правая краевая область гибкого устройства 100 изгибаются в направлении Z+, контроллер 130 может осуществлять управление для удержания состояния изгиба, в котором центральная область гибкого устройства 100 изгибается в направлении Z-.
[135] В отличие от этого, когда первая изгибающая манипуляция выполняется в первом направлении, в котором одна область гибкого устройства 100 гнется вверх или вниз, а вторая изгибающая манипуляция выполняется на другой области во втором направлении, которое противоположно первому направлению, контроллер 130 может удерживать состояние изгиба у гибкого устройства 100.
[136] Другая область может включаться в изогнутую область, которая образуется путем изгиба одной области гибкого устройства 100.
[137] Например, как проиллюстрировано на фиг. 10, когда левая верхняя область гибкого устройства 100 изгибается в направлении Z+, и одна область изогнутой левой верхней области изгибается в направлении Z-, контроллер 130 может осуществлять управление для удержания состояния изгиба, в котором левая верхняя область гибкого устройства 100 изгибается в направлении Z+.
[138] Кроме того, как проиллюстрировано на фиг. 11, когда левая область гибкого устройства 100 изгибается в направлении Z+, и одна область изогнутой левой области изгибается в направлении Z-, контроллер 130 может осуществлять управление для удержания состояния изгиба, в котором левая область гибкого устройства 100 изгибается в направлении Z+.
[139] В вышеописанном варианте осуществления из настоящего раскрытия изобретения, когда гибкое устройство 100 изгибается в одном направлении, а затем изгибается в другом направлении, контроллер 130 может осуществлять управление для удержания состояния изгиба. Однако такая работа является всего лишь примером.
[140] Например, в соответствии с различными вариантами осуществления из настоящего раскрытия изобретения, когда проводится манипуляция кнопкой для выбора кнопки, предусмотренной на гибком устройстве 100, или когда состояние изгиба удерживается больше чем на предварительно определенное время, контроллер 130 может осуществлять управление для удержания состояния изгиба у гибкого устройства 100.
[141] В качестве другого примера в соответствии с различными вариантами осуществления из настоящего раскрытия изобретения, когда первая изгибающая манипуляция выполняется над гибким устройством 100, а затем вторая изгибающая манипуляция выполняется в направлении, противоположном первой изгибающей манипуляции после того, как истекает предварительно определенное время, контроллер 130 может осуществлять управление для удержания состояния изгиба у гибкого устройства 100.
[142] В качестве другого примера в соответствии с различными вариантами осуществления из настоящего раскрытия изобретения, когда проводится сенсорная манипуляция для касания поверхности дисплея, предусмотренного в гибком устройстве 100, контроллер 130 может осуществлять управление для удержания состояния изгиба у гибкого устройства 100. В этом случае гибкое устройство 100 может включать в себя сгибаемый дисплей (не показан), а датчик 110 может включать в себя резистивный или емкостный сенсорный датчик для обнаружения сенсорной манипуляции на дисплее (не показан). Соответственно, контроллер 130 на основе электрического сигнала, который передается от датчика 110, может определить, проводится ли манипуляция пользователя для удержания состояния изгиба у гибкого устройства 100.
[143] В качестве другого примера в соответствии с различными вариантами осуществления из настоящего раскрытия изобретения, когда проводится изгибающая манипуляция для изгиба предварительно определенной области гибкого устройства 100, контроллер 130 может осуществлять управление для удержания состояния изгиба у гибкого устройства 100. Например, даже когда изгибающая манипуляция не выполняется в противоположном направлении к направлению изгиба у изогнутого гибкого устройства 100, контроллер 130 может осуществлять управление для удержания состояния изгиба у гибкого устройства 100, когда обнаруживается изгиб предварительно определенной области гибкого устройства 100. Предварительно определенная область может задаваться и изменяться пользователем.
[144] В качестве примера с пояснительными целями предполагается, что левая верхняя область гибкого устройства 100 изгибается в направлении Z+. В этом случае, когда правая верхняя область гибкого устройства 100 изгибается в направлении Z+, пока удерживается изгиб, контроллер 130 может осуществлять управление для удержания состояния изгиба, в котором левая верхняя область гибкого устройства 100 изгибается в направлении Z+.
[145] В соответствии с различными вариантами осуществления из настоящего раскрытия изобретения контроллер 130 может осуществлять управление для удержания состояния изгиба у гибкого устройства 100 на основе речи или движения пользователя.
[146] В частности, контроллер 130 определяет, согласуется ли речь, полученная средством получения речи, предусмотренным в гибком устройстве 100, например микрофоном (не показан) или т.п., с предварительно определенной речевой командой. Когда определяется, что полученная речь согласуется с речевой командой для удержания состояния изгиба у гибкого устройства 100, контроллер 130 осуществляет управление для удержания состояния изгиба у гибкого устройства 100.
[147] Контроллер 130 анализирует изображение пользователя, которое получается посредством средства съемки изображений (не показано), предусмотренного в гибком устройстве 100, например камеры, и контроллер 130 определяет жест пользователя. В частности, контроллер 130 анализирует изображение пользователя. Когда контроллер 130 определяет, что пользователь делает жест, соответствующий команде движения для удержания состояния изгиба у гибкого устройства 100, контроллер 130 осуществляет управление для удержания состояния изгиба у гибкого устройства 100.
[148] В отличие от этого, когда не принимается предварительно определенный ввод, пока гибкое устройство 100 изгибается, контроллер 130 может сбросить информацию о состоянии изгиба, которая хранится в гибком устройстве 100. Предварительно определенный ввод может включать в себя манипуляцию пользователя для удержания состояния изгиба у изогнутого гибкого устройства 100 и, например, может включать в себя разгибание гибкого устройства 100 в направлении, противоположном предшествующему изгибу, пока гибкое устройство 10 изгибается.
[149] В соответствии с различными вариантами осуществления из настоящего раскрытия изобретения, когда проводится манипуляция пользователя помимо предварительно определенного ввода, например, изменение угла изгиба у гибкого устройства 100, возврат гибкого устройства 100 к плоскому состоянию и разгибание гибкого устройства 100 после того, как гибкое устройство 100 возвращается к плоскому состоянию, контроллер 130 может сбросить информацию о состоянии изгиба, которая хранится в гибком устройстве 100.
[150] Когда гибкое устройство 100 изгибается с помощью первой изгибающей манипуляции, а вторая изгибающая манипуляция выполняется в направлении, противоположном первой изгибающей манипуляции, но вторая изгибающая манипуляция выполняется после того, как истекает предварительно определенное время после первой изгибающей манипуляции, контроллер 130 может сбросить информацию о состоянии изгиба, которая хранится в гибком устройстве 100.
[151] Как описано выше, контроллер 130 может хранить в гибком устройстве 100 информацию о конечном состоянии изгиба у гибкого устройства 100. Когда принимается предварительно определенный ввод, пока гибкое устройство 100 изгибается окончательно, контроллер 130 может осуществлять управление для удержания конечного состояния изгиба у гибкого устройства 100, используя информацию о конечном состоянии изгиба.
[152] В качестве примера можно предположить, что гибкое устройство 100 изгибается с помощью первой изгибающей манипуляции, и после этого может выполняться вторая изгибающая манипуляция в таком же направлении, что и первая изгибающая манипуляция. В этом случае контроллер 130 сбрасывает информацию о состоянии изгиба, которая сохраняется, когда выполняется первая изгибающая манипуляция гибкого устройства 100, и сохраняет информацию о состоянии изгиба у гибкого устройства 100, когда выполняется вторая изгибающая манипуляция. После этого, когда выполняется третья манипуляция в направлении, противоположном второй изгибающей манипуляции, пока гибкое устройство 100 изгибается с помощью второй изгибающей манипуляции, контроллер 130 может осуществлять управление для удержания состояния, в котором гибкое устройство 100 изгибается с помощью второй изгибающей манипуляции.
[153] Однако гибкое устройство 100 может обладать свойством возвращаться к плоскому состоянию благодаря упругости гибкого устройства 100. Поэтому, когда никакая внешняя сила не прикладывается после того, как гибкое устройство 100 изгибается с помощью первой изгибающей манипуляции, и соответственно, гибкое устройство 100 возвращается к плоскому состоянию, контроллер 130 может выполнить только операцию по сбросу информации о состоянии изгиба, которая хранится в гибком устройстве 100. Например, информация о состоянии изгиба может храниться не отдельно.
[154] В отличие от этого, как описано выше, когда гибкое устройство 100 изгибается с помощью первой изгибающей манипуляции, а затем вторая изгибающая манипуляция выполняется в направлении, противоположном первой изгибающей манипуляции, контроллер 130 может управлять приспособлением 120 удержания изгиба для удержания состояния, в котором гибкое устройство 100 изгибается с помощью первой изгибающей манипуляции.
[155] В этом случае, когда истекает предварительно определенное время после того, как выполнена вторая изгибающая манипуляция, контроллер 130 может управлять приспособлением 120 удержания изгиба для удержания первого состояния изгиба. Контроллер 130 может управлять приспособлением 120 удержания изгиба для удержания первого состояния изгиба, чтобы определить, является ли намерением пользователя, который выполняет вторую изгибающую манипуляцию, удержать первое состояние изгиба. Соответственно, когда вторая изгибающая манипуляция отменяется до того, как истекает предварительно определенное время после того, как выполнена вторая изгибающая манипуляция, контроллер 130 может определить, что вторая изгибающая манипуляция не является изгибающей манипуляцией для удержания первого состояния изгиба, и может сбросить информацию о состоянии изгиба, которая сохраняется, когда выполняется первая изгибающая манипуляция. В то же время, поскольку гибкое устройство 100 обладает свойством возвращаться к плоскому состоянию благодаря упругости гибкого устройства 100, гибкое устройство 100 может вернуться к плоскому состоянию, когда никакая внешняя сила не прикладывается.
[156] В вышеописанном варианте осуществления из настоящего раскрытия изобретения вторая изгибающая манипуляция отменяется до того, как истекает предварительно определенное время после того, как выполнена вторая изгибающая манипуляция. Однако это всего лишь пример. Когда новая изгибающая манипуляция выполняется до того, как истекает предварительно определенное время после того, как выполнена вторая изгибающая манипуляция, контроллер 130 может сбросить информацию о состоянии изгиба, которая сохраняется, когда выполняется первая изгибающая манипуляция. В этом случае контроллер 130 может осуществлять управление для сохранения информации о конечном состоянии изгиба у гибкого устройства 100 в соответствии со второй изгибающей манипуляцией.
[157] Когда гибкое устройство 100 изгибается с помощью первой изгибающей манипуляции, а затем вторая изгибающая манипуляция выполняется в направлении, противоположном первой изгибающей манипуляции, но, когда область, изогнутая второй изгибающей манипуляцией, сводится с областью, изогнутой первой изгибающей манипуляцией, контроллер 130 может сбросить информацию о состоянии изгиба, которая сохраняется, когда выполняется первая изгибающая манипуляция.
[158] В качестве примера можно предположить, что левая верхняя область гибкого устройства 100 изгибается примерно на 90° в направлении Z+, а затем одна область изогнутой левой верхней области изгибается в направлении Z-. В то же время, когда одна область левой верхней области изгибается примерно на 180° в направлении Z-, и соответственно передняя поверхность и задняя поверхность гибкого устройства 100 сводятся друг с другом, контроллер 130 может сбросить информацию о состоянии изгиба, которая сохраняется, когда выполняется первая изгибающая манипуляция.
[159] Датчик 120 может включать в себя сенсорный датчик, датчик давления и датчик приближения для обнаружения, сводятся ли друг с другом передняя поверхность и задняя поверхность гибкого устройства 100, и контроллер 130 на основе выходных значений этих датчиков может определить, сводятся ли друг с другом передняя поверхность и задняя поверхность гибкого устройства 100.
[160] Контроллер 130 может определить, сводятся ли друг с другом передняя поверхность и задняя поверхность гибкого устройства 100, используя значения сопротивления, которые выводятся из датчиков изгиба или тензометров. Например, гибкое устройство 100 может предварительно сохранить значения сопротивления, которые выводятся с линии изгиба, когда гибкое устройство 100 изгибается на 180°, а когда гибкое устройство 100 изгибается, и значения сопротивления, соответствующие предварительно сохраненным значениям сопротивления, выводятся с линии изгиба, контроллер 130 может определить, что гибкое устройство 100 изгибается на 180°, и соответственно передняя поверхность и задняя поверхность гибкого устройства 100 сводятся друг с другом.
[161] В отличие от этого, когда вводится команда освобождения, пока гибкое устройство 100 изгибается, контроллер 130 может управлять приспособлением 120 удержания изгиба, чтобы вернуть гибкое устройство 10 к плоскому состоянию. В частности, когда вводится команда освобождения, контроллер 130 может блокировать напряжение, приложенное к полимерной пленке, и вернуть гибкое устройство 100 к плоскому состоянию. Когда вводится команда освобождения, контроллер 130 может сбросить информацию о состоянии изгиба, которая хранится в гибком устройстве 100.
[162] Команда освобождения может вводиться с помощью по меньшей мере одной из манипуляции кнопкой для выбора кнопки, предусмотренной на корпусе гибкого устройства 100, и изгибающей манипуляции для изгиба предварительно определенной области гибкого устройства 100. Предварительно определенная область может задаваться и изменяться пользователем, и может изменяться в соответствии с местоположением исходно изогнутой области.
[163] Например, когда левая область или правая область исходно изгибается относительно центра гибкого устройства 100, и правая область или левая область гибкого устройства 100 изгибается, контроллер 130 может определить, что вводится команда освобождения. К тому же, когда верхняя область или нижняя область гибкого устройства 100 исходно изгибается относительно центра гибкого устройства 100, и нижняя область или верхняя область гибкого устройства 100 изгибается, контроллер 130 может определить, что вводится команда освобождения.
[164] Однако такая конфигурация является лишь примером, и местоположение области, которая будет изогнута для ввода команды освобождения, можно реализовать по-разному.
[165] В качестве примера в соответствии с различными вариантами осуществления из настоящего раскрытия изобретения контроллер 130 может вернуть зафиксированное гибкое устройство 100 к первоначальному плоскому состоянию на основе речи или движения пользователя. Например, когда речь или жест пользователя, которые получены, согласуются с командой для отмены состояния изгиба у гибкого устройства 100, контроллер 130 может вернуть гибкое устройство 100 к плоскому состоянию.
[166] К тому же, когда исполняется приложение, установленное в гибком устройстве 100, контроллер 130 может вернуть гибкое устройство 100 к первоначальному плоскому состоянию. Упомянутое в этом документе приложение относится к программному обеспечению, которое может непосредственно использоваться пользователем в операционной системе (OS) и может предоставляться в виде интерфейса с пиктограммами на экране дисплея (не показан), когда гибкое устройство 100 включает в себя сгибаемый дисплей (не показан). Например, приложение может включать в себя приложение чтения электронных книг, игровое приложение, приложение обмена сообщениями и/или т.п.
[167] Например, когда пользователь касается дисплея (не показан) и исполняет приложение, пока гибкое устройство 100 изогнуто и зафиксировано, контроллер 130 может вернуть зафиксированное гибкое устройство 100 к первоначальному плоскому состоянию.
[168] Фиг. 12 - блок-схема для иллюстрации подробной конфигурации гибкого устройства в соответствии с вариантом осуществления из настоящего раскрытия изобретения.
[169] Ссылаясь на фиг. 12, гибкое устройство 100 может включать в себя датчик 110, приспособление 120 удержания изгиба, контроллер 130, дисплей 140, запоминающее устройство 150, средство 160 связи, модуль 165 GPS, приемник 166 Цифрового мультимедийного вещания (DMB), звуковой процессор 170, видеопроцессор 175, источник 180 питания, динамик 185, кнопку 191, порт 192 USB, камеру 193 и микрофон 194.
[170] Дисплей 140 отображает различные экраны. В частности, дисплей 140 может отображать экран воспроизведения контента, например изображения, динамического изображения, текста, музыки, экран исполнения, различные экраны Интерфейса пользователя (UI) или т.п.
[171] Дисплей 140 может изгибаться. Например, дисплей 140 может предоставляться на одной поверхности или противоположных поверхностях гибкого устройства 100 и может изгибаться вместе с гибким устройством 100. Соответственно, дисплей 140 может иметь сгибаемую конструкцию, и его можно изготовить из сгибаемого материала. Ниже будет объясняться подробная конфигурация дисплея 140 со ссылкой на фиг. 13.
[172] Фиг. 13 иллюстрирует конфигурацию дисплея, который составляет гибкое устройство в соответствии с вариантом осуществления из настоящего раскрытия изобретения.
[173] Ссылаясь на фиг. 13, дисплей 140 включает в себя подложку 141, драйвер 142, дисплейную панель 143 и защитный слой 144.
[174] Гибкое устройство 100 относится к устройству, которое можно изгибать, гнуть, складывать, сворачивать как бумагу или т.п., имея при этом характеристики отображения существующего плоского устройства отображения. Например, гибкое устройство 100 может иметь характеристики отображения плоского дисплея наряду с тем, что гибким устройством 100 манипулируют или иным образом помещают в управляемое состояние. В соответствии с различными вариантами осуществления из настоящего раскрытия изобретения гибкое устройство 100 производится на гибкой подложке.
[175] В частности, подложку 141 можно реализовать с помощью пластмассовой подложки (например, высокомолекулярной пленки), которая является деформируемой внешним давлением.
[176] В соответствии с различными вариантами осуществления из настоящего раскрытия изобретения пластмассовая подложка обладает структурой, которая образуется путем выполнения барьерного покрытия противоположных поверхностей пленки-основы. Пленку-основу можно реализовать с использованием различных смол, например полиимида (PI), поликарбоната (PC), полиэтилентерефталата (PET), полиэфирсульфона (PES), полиэтилена нафталата (PEN), волокнита (FRP) и/или т.п. Барьерное покрытие выполняется на противоположных поверхностях пленки-основы, и с целью поддержания гибкости может использоваться органическая мембрана или неорганическая мембрана.
[177] Подложка 141 может быть образована, помимо пластмассовой подложки, из гибкого материала, например тонкого стекла или металлической фольги.
[178] Драйвер 142 управляет дисплейной панелью 143. В частности, драйвер 142 прикладывает управляющее напряжение к множеству пикселей, составляющих дисплейную панель 143, и может быть реализован с использованием аморфного кремния, тонкопленочного транзистора (TFT), TFT с применением низкотемпературного поликристаллического кремния (LTPS), органического TFT (OTFT) и/или т.п.
[179] Драйвер 142 также можно реализовать в различных видах в соответствии с видом дисплейной панели 143. Например, дисплейная панель 143 может включать в себя органическое светоизлучающее вещество, которое состоит из множества ячеек пикселей, и электродный слой, который покрывает противоположные поверхности органического светоизлучающего вещества. В этом случае драйвер 142 может включать в себя множество транзисторов, соответствующих множеству ячеек пикселей у дисплейной панели 143. Контроллер 130 подает электрический сигнал на затвор каждого транзистора и управляет ячейкой пикселей, подключенной к транзистору, для излучения света. Соответственно, отображаются различные экраны.
[180] Дисплейную панель 143 можно реализовать с использованием электролюминесцентного дисплея (ELD), электрофоретического дисплея (EPD), электрохромного дисплея (ECD), жидкокристаллического дисплея (LCD), LCD с активной матрицей (AMLCD), плазменной панели (PDP), дисплея на органических светоизлучающих диодах (OLED) и/или т.п. Однако различные дисплейные панели (например, LCD) могут быть не способны самостоятельно излучать свет и, соответственно, требуют отдельного блока задней подсветки. Когда LCD не использует блок задней подсветки, LCD использует окружающий свет. Чтобы использовать дисплейную панель 143 на LCD без блока задней подсветки, для работы LCD может использоваться окружение, например внешняя среда, которая обеспечивает достаточно света.
[181] Защитный слой 144 защищает дисплейную панель 143. Например, защитный слой 144 можно изготовить из ZrO, CeO2, ThO2 и/или т.п. Защитный слой 144 можно произвести в виде прозрачной пленки, и она может покрывать всю поверхность дисплейной панели 143.
[182] В соответствии с различными вариантами осуществления из настоящего раскрытия изобретения, в отличие от блока отображения, проиллюстрированного на фиг. 13, блок 140 отображения можно реализовать с использованием электронной бумаги (e-paper). Электронная бумага является дисплеем, который применяет характеристики обычных чернил к бумаге и отличается от обычного плоского дисплея в том, что электронная бумага использует отраженный свет. Электронная бумага может изменять изображение или текст с использованием электрофореза, который использует вращающуюся сферу или капсулу.
[183] Когда дисплей 140 состоит из элементов из прозрачного материала, дисплей 140 можно реализовать в виде гибкого устройства 100, которое является сгибаемым и обладает прозрачностью. Например, когда подложку 141 можно изготовить из полимерного материала, например пластмассы, обладающей прозрачностью, драйвер 142 можно реализовать с помощью прозрачного транзистора, а дисплейную панель 143 можно реализовать с использованием прозрачного органического светоизлучающего вещества и прозрачного электрода, дисплей 140 обладает прозрачностью.
[184] В качестве примера прозрачный транзистор относится к транзистору, который производится путем замены непрозрачного кремния в тонкопленочном транзисторе из предшествующего уровня техники прозрачным материалом, например прозрачной окисью цинка, окисью титана или т.п. Прозрачный электрод можно изготовить из передовых материалов, например оксида индия и олова (ITO), графена или т.п. Графен является материалом, который имеет плоскую структуру сотовой формы, в которой атомы углерода соединяются друг с другом, и который обладает прозрачностью. Прозрачный органический светоизлучающий слой можно реализовать с использованием различных материалов.
[185] Датчик 110 включает в себя геомагнитный датчик 111, гироскоп 112, датчик 113 ускорения, сенсорный датчик 114, датчик 115 изгиба, датчик 116 давления и датчик 117 приближения. Датчик 110 может обнаруживать различные манипуляции, например касание, вращение, наклон, давление, приближение и/или т.п., над гибким устройством 100 в дополнение к изгибающему жесту.
[186] Геомагнитный датчик 111 обнаруживает состояние вращения и направление движения гибкого устройства 100. Гироскоп 112 обнаруживает угол поворота гибкого устройства 100. Может предоставляться геомагнитный датчик 111 и гироскоп 112, но когда предоставляется только один из них, контроллер 130 может обнаруживать состояние вращения гибкого устройства. Контроллер 130 может поворачивать экран в соответствии с состоянием вращения гибкого устройства 100 и может отображать экран на дисплее 140.
[187] Датчик 113 ускорения обнаруживает степень наклона гибкого устройства 100. Датчик 113 ускорения может использоваться для обнаружения характеристик изгиба, например направления изгиба и области изгиба, у гибкого устройства 100.
[188] Сенсорный датчик 114 можно реализовать с использованием емкостного типа, резистивного типа датчика и/или т.п. Емкостной тип вычисляет координаты касания путем обнаружения небольшого электричества, вызванного в теле пользователя, когда часть тела пользователя касается поверхности дисплея 140, используя диэлектрическое вещество, нанесенное на поверхность дисплея 140. Резистивный тип включает в себя две электродные пластины, и когда пользователь касается экрана, вычисляет координаты касания путем обнаружения электрического тока, текущего вследствие контакта между верхней и нижней пластинами в точке контакта. Как описано выше, сенсорный датчик 114 можно реализовать в различных видах. Контроллер 130 может определить местоположение касания, количество точек касания и время удержания касания в соответствии с результатом обнаружения с помощью сенсорного датчика 114.
[189] Датчик 115 изгиба можно реализовать в различных формах и количествах, как описано выше, и он может обнаруживать состояние изгиба у гибкого устройства 100. Конфигурация и работа датчика 115 изгиба описаны выше, и соответственно излишнее объяснение пропускается.
[190] Датчик 116 давления обнаруживает величину давления, оказанного на гибкое устройство 100, когда пользователь выполняет сенсорную или изгибающую манипуляцию, и предоставляет величину давления контроллеру 130. Датчик 116 давления может включать в себя пьезоэлектрическую пленку, которая встраивается в дисплей 140 и выводит электрический сигнал, соответствующий величине давления. Хотя датчик 116 давления является обособленным элементом от сенсорного датчика 114 на фиг. 12, когда сенсорный датчик 114 реализуется с использованием резистивного сенсорного датчика, резистивный сенсорный датчик также может выполнять функцию датчика 116 давления.
[191] Датчик 117 приближения обнаруживает движение, которое приближается без непосредственного соприкосновения с поверхностью дисплея гибкого устройства 100. Датчик 117 приближения можно реализовать с использованием различных типов датчиков, например датчика приближения на высокочастотных колебаниях, который создает высокочастотное магнитное поле и который обнаруживает электрический ток, наведенный магнитной характеристикой, которая изменяется, когда приближается объект, датчика приближения магнитного типа, который использует магнит, и датчика приближения емкостного типа, который обнаруживает емкость, которая изменяется, когда приближается объект, и/или т.п.
[192] Контроллер 130 анализирует различные сигналы обнаружения, обнаруженные датчиком 110, определяет намерение пользователя и выполняет операцию, соответствующую этому намерению. Например, контроллер 130 может осуществлять управление для удержания состояния изгиба у гибкого устройства 100 на основе результата обнаружения с помощью датчика 110.
[193] К тому же контроллер 130 может выполнять различные операции управления в соответствии с различными способами ввода, например сенсорной манипуляцией, ввода с помощью движения, речевого ввода, ввода с помощью кнопок и/или т.п. Сенсорная манипуляция может включать в себя простое касание, выбор, касание и удержание, перемещение, пролистывание, буксировку, сдвигание, раздвигание и/или т.п.
[194] Например, контроллер 130 может исполнять приложение, сохраненное в запоминающем устройстве 150, может конфигурировать экран исполнения у приложения и может отображать экран исполнения на дисплее 140. К тому же контроллер 130 может воспроизводить различный контент, сохраненный в запоминающем устройстве 150. Упомянутый в этом документе контент может относиться к различному мультимедийному контенту, например изображениям, текстам, музыке, динамическим изображениям и/или т.п. Контроллер 130 может взаимодействовать с внешними устройствами посредством средства 160 связи.
[195] Средство 160 связи может взаимодействовать с различными типами внешних устройств в соответствии с различными способами связи. Средство 160 связи может включать в себя блок 161 Wi-Fi, блок 162 Bluetooth, блок 163 связи малого радиуса действия (NFC), блок 164 беспроводной связи и/или т.п. Средство 160 связи может принимать контент от различных типов внешних устройств и может передавать контент различным типам внешних устройств посредством вышеуказанных блоков. В соответствии с различными вариантами осуществления из настоящего раскрытия изобретения один или несколько из вышеуказанных блоков связи могут объединяться в один блок.
[196] Блок 161 Wi-Fi, блок 162 Bluetooth и блок 163 NFC взаимодействуют с внешними устройствами соответственно по способу Wi-Fi, способу Bluetooth и способу NFC. Среди вышеуказанных блоков блок 163 NFC работает по способу NFC, который использует 13,56 МГц среди различных полос частот RF-ID, например 135 кГц, 13,56 МГц, 433 МГц, 860~960 МГц и 2,45 ГГц. Когда используется блок 161 Wi-Fi или блок 162 Bluetooth, сначала обмениваются различной информацией о соединении, например Идентификатором набора служб (SSID) и сеансовым ключом, и соединение устанавливается с использованием информации о соединении, а затем обмениваются различной информацией. Блок 164 беспроводной связи взаимодействует с внешними устройствами в соответствии с различными стандартами связи, например IEEE, Zigbee, 3-е поколение (3G), Проект партнерства 3-го поколения (3GPP), Система долгосрочного развития (LTE) и/или т.п. В частности, блок 164 беспроводной связи может обращаться к веб-серверу посредством сети мобильной связи и может взаимодействовать с веб-сервером.
[197] Модуль 165 GPS является модулем, который принимает сигнал GPS от спутника GPS и который обнаруживает текущее местоположение гибкого устройства 100. В частности, модуль 165 GPS может принимать сигнал GPS от спутника и может формировать информацию о местоположении, включающую в себя широту, долготу, высоту текущего местоположения гибкого устройства 100. В частности, модуль 165 GPS принимает сигналы от множества спутников GPS и вычисляет расстояние между спутником и приемником, используя разницу времени между временем передачи и временем приема. Модуль 165 GPS может вычислить текущее местоположение гибкого устройства 100 по способу вычисления, например трилатерации, принимая во внимание вычисленное расстояние между каждым из множества спутников и приемником и местоположения спутников.
[198] Приемник 166 DMB принимает сигнал DMB и обрабатывает сигнал DMB.
[199] Запоминающее устройство 150 может хранить информацию о состоянии изгиба у гибкого устройства 100. Информация о состоянии изгиба может включать в себя по меньшей мере одно из области изгиба, угла изгиба и направления изгиба у гибкого устройства 100. В частности, когда гибкое устройство 100 изгибается, контроллер 130 сохраняет информацию о состоянии изгиба в запоминающем устройстве 150, а когда принимается предварительно определенный ввод, осуществляет управление для удержания состояния изгиба у гибкого устройства 100, используя сохраненную информацию. Управление гибким устройством 100 для удержания состояния изгиба описано выше со ссылкой на фиг. 7A и 7B, и соответственно излишнее объяснение пропускается.
[200] Запоминающее устройство 150 может включать в себя носитель информации по меньшей мере одного типа из флэш-памяти, жесткого диска, мультимедийной карты, запоминающего устройства карточного типа (например, Secure Digital (SD), запоминающее устройство XD или т.п.), оперативного запоминающего устройства (RAM), постоянного запоминающего устройства (ROM) или т.п.
[201] В этом случае носитель информации каждого типа можно реализовать с использованием гибкого материала. Однако различные варианты осуществления из настоящего раскрытия изобретения не следует рассматривать как ограниченные вышеуказанными конфигурациями.
[202] Источник 180 питания подает питание на каждый элемент гибкого устройства 100. Источник 180 питания может включать в себя анодный коллектор, анодный электрод, электролит, катодный электрод, катодный коллектор и оболочку, вмещающую вышеупомянутые элементы. Источник 180 питания можно реализовать с использованием вторичного элемента, который можно заряжать, или который может выдавать электричество.
[203] Звуковой процессор 170 обрабатывает звуковые данные. Звуковой процессор 170 может выполнять различные обрабатывающие операции по отношению к звуковым данным, например декодирование, усиление и фильтрацию шума.
[204] Видеопроцессор 175 обрабатывает видеоданные. Видеопроцессор 175 может выполнять различные операции обработки изображений по отношению к видеоданным, например декодирование, масштабирование, фильтрацию шума, преобразование частоты кадров, преобразование разрешения и/или т.п. В частности, видеопроцессор 175 может масштабировать экран в соответствии с размером активизированной области разделения или может изменить разрешение.
[205] Дисплей 140 может отображать различные экраны или объекты под управлением контроллера 130. Например, контроллер 130 выполняет обработку сигналов по отношению к различным изображениям, текстам, динамическим изображениям и/или т.п., сохраненным в запоминающем устройстве 150 в формате, который может быть обработан дисплеем 140, посредством звукового процессора 170 и видеопроцессора 175 и отображает различные изображения, тексты, динамические изображения и/или т.п. на дисплее 140.
[206] Контроллер 130 может отображать GUI на дисплее 140 для приема различных команд пользователя. Например, контроллер 130 может отображать GUI на дисплее 140 для приема команды пользователя для удержания состояния изгиба у гибкого устройства 100 или команды пользователя для освобождения изогнутого гибкого устройства 100.
[207] Динамик 185 выводит различные звуки уведомлений или речевые сообщения, а также различные звуковые данные, обработанные звуковым процессором 170.
[208] Кнопку 191 можно реализовать с использованием различных видов кнопок, например механической кнопки, сенсорной панели, колеса и/или т.п., которые образуются на некоторой области гибкого устройства 100, например передней поверхности, боковой поверхности и нижней поверхности внешней части корпуса гибкого устройства 100.
[209] Посредством кнопки 191 можно принимать различные манипуляции пользователя для управления работой гибкого устройства 100, например команды включения/выключения. Например, посредством кнопки 191 можно принять манипуляцию пользователя для удержания состояния изгиба у гибкого устройства 100 и манипуляцию пользователя для освобождения изогнутого гибкого устройства 100.
[210] Порт 192 USB является портом, к которому подключается запоминающее устройство USB или USB-разъем, и гибкое устройство 100 может принимать различный контент от внешних устройств или может передавать контент внешним устройствам посредством порта 192 USB.
[211] Камера 193 является элементом, который захватывает неподвижное изображение или динамическое изображение в соответствии с управлением от пользователя. Камера 193 может располагаться на передней поверхности или задней поверхности гибкого устройства 100.
[212] Микрофон 194 является элементом, который принимает речь пользователя или другие звуки и преобразует их в звуковые данные. Контроллер 130 может использовать речевой ввод пользователя посредством микрофона 194 для обработки вызовов или может преобразовать речь пользователя в звуковые данные и сохранить звуковые данные в запоминающем устройстве 150.
[213] Когда предоставляется камера 193 и микрофон 194, контроллер 130 может выполнять операции управления в соответствии с речью пользователя, которая вводится посредством микрофона 194, или движение пользователя, которое распознается с помощью камеры 193. Например, гибкое устройство 100 может работать в режиме управления движением или в режиме речевого управления.
[214] Например, в режиме управления движением контроллер 130 активизирует камеру 193 и захватывает пользователя, отслеживает изменение движения пользователя и выполняет операцию управления, например удержание состояния изгиба у гибкого устройства 100 или освобождение изогнутого гибкого устройства 100. В режиме речевого управления контроллер 130 может анализировать речь пользователя, введенную посредством микрофона 194, и выполняет операцию управления, например удержание состояния изгиба у гибкого устройства 100 или освобождение изогнутого гибкого устройства 100, в соответствии с проанализированной речью пользователя.
[215] К тому же гибкое устройство 100 может дополнительно включать в себя различные внешние порты ввода для подключения к различным внешним терминалам, например гарнитуре, мыши, локальной сети (LAN) и/или т.п.
[216] Вышеописанная работа контроллера 130 может выполняться программой, которая хранится в запоминающем устройстве 150. Запоминающее устройство 150 может хранить программное обеспечение операционной системы (O/S) для управления гибким устройством 100, различные приложения, различные данные, которые вводятся, когда исполняется приложение, и различные данные, например контент.
[217] Контроллер 130 управляет общей работой гибкого устройства 100, используя различные программы, сохраненные в запоминающем устройстве 150.
[218] Контроллер 130 включает в себя оперативное запоминающее устройство 131 (RAM), постоянное запоминающее устройство 132 (ROM), центральный процессор 133 (CPU), графический процессор 134, интерфейсы 135-1~135-n с первого по n-й и шину 136.
[219] RAM 131, ROM 132, CPU 133, графический процессор 134 и интерфейсы 135-1~135-n с первого по n-й могут соединяться друг с другом посредством шины 136.
[220] Интерфейсы 135-1~135-n с первого по n-й подключаются к различным вышеописанным элементам. По меньшей мере один из интерфейсов 135-1~135-n с первого по n-й может быть сетевым интерфейсом, который подключается к внешнему устройству через сеть.
[221] CPU 133 обращается к запоминающему устройству 150 и выполняет загрузку с использованием O/S, сохраненной в запоминающем устройстве 150. CPU 133 выполняет различные операции с использованием различных программ, контента и данных, сохраненных в запоминающем устройстве 150.
[222] ROM 132 хранит набор команд для загрузки системы. Когда вводится команда включения и подается питание, CPU 133 копирует O/S, сохраненную в запоминающем устройстве 140, в RAM 131 в соответствии с командой, сохраненной в ROM 132, исполняет O/S и загружает систему. Когда загрузка завершается, CPU 133 копирует в RAM 131 различные приложения, сохраненные в запоминающем устройстве 140, исполняет приложения, скопированные в RAM 131, и выполняет различные операции.
[223] Графический процессор 134 формирует различные экраны под управлением CPU 133.
[224] Графический процессор 134 вычисляет значение состояния отображения на экране. Значение состояния отображения может быть значением атрибута, указывающим значение координаты местоположения, в котором нужно отобразить объект на экране, и форму, размер и цвет объекта. Когда вычисляется значение состояния отображения, графический процессор 134 выполняет визуализацию на основе значения и формирует экран.
[225] Конфигурация гибкого устройства 100 отображения, проиллюстрированная на фиг. 12, является лишь пояснительным примером. В соответствии с различными вариантами осуществления из настоящего раскрытия изобретения некоторые из элементов, проиллюстрированных на фиг. 12, можно изъять или изменить, либо можно добавить другой элемент.
[226] Как описано выше, контроллер 130 может выполнять различные операции путем исполнения программы, сохраненной в запоминающем устройстве 140.
[227] Фиг. 14 - изображение для объяснения иерархии программного обеспечения, сохраненного в запоминающем устройстве в соответствии с вариантом осуществления из настоящего раскрытия изобретения.
[228] Ссылаясь на фиг. 14, запоминающее устройство 150 включает в себя базовый модуль 151, модуль 152 обнаружения, модуль 153 связи, модуль 154 представления, модуль 155 веб-обозревателя и модуль 156 обработки контента.
[229] Базовый модуль 151 относится к модулю, который обрабатывает сигналы, переданные от каждого из аппаратных средств, включенных в гибкое устройство 100, и который передает сигналы модулю верхнего уровня.
[230] Базовый модуль 151 включает в себя модуль 151-1 хранения, модуль 151-2 местоположения, модуль 151-3 безопасности и сетевой модуль 151-4.
[231] Модуль 151-1 хранения является программным модулем, который управляет базой данных (DB) или реестром. CPU 133 может обращаться к базе данных в запоминающем устройстве 150, используя модуль 151-1 хранения, и может считывать различные данные. Модуль 151-2 местоположения является программным модулем, который соединяется и/или взаимодействует с различными аппаратными средствами, например микросхемой GPS, и поддерживает основанную на местоположении услугу. Модуль 151-3 безопасности является программным модулем, который поддерживает сертификацию для аппаратных средств, разрешение запроса и защищенное хранение. Сетевой модуль 151-4 является модулем для поддержки сетевого соединения и включает в себя модуль Distributed.net (DNET) и модуль универсального автоматического конфигурирования (UPnP).
[232] Модуль 152 обнаружения является модулем, который управляет информацией о внешнем вводе и внешнем устройстве и использует эту информацию. Модуль 152 обнаружения включает в себя модуль 152-1 распознавания вращения, модуль 152-2 распознавания речи, модуль 152-3 распознавания касаний и модуль 152-4 распознавания жестов. Модуль 152-1 распознавания вращения является программой для вычисления угла поворота и направления вращения с использованием значений обнаружения, обнаруженных датчиками, например геомагнитным датчиком 111, гироскопом 112 и/или т.п. Модуль 152-2 распознавания речи является программой для анализа речевого сигнала, полученного посредством микрофона 194, и извлечения речи пользователя. Модуль 152-3 распознавания касаний является программой для обнаружения координат касания с использованием значений обнаружения, обнаруженных сенсорным датчиком 114 и/или т.п. Модуль 152-4 распознавания жестов является программой для анализа изображения, снятого камерой 194, и распознавания жеста пользователя.
[233] Модуль 153 связи является модулем для взаимодействия с внешним устройством. Модуль 153 связи может включать в себя модуль 153-1 обмена сообщениями, например программу доставки сообщений, программу Службы коротких сообщений (SMS) и Службы мультимедийных сообщений (MMS), программу электронной почты и/или т.п. Модуль связи может включать в себя телефонный модуль 153-2, который включает в себя программный модуль агрегации информации о вызовах и модуль передачи речи по IP-протоколу (VoIP).
[234] Модуль 154 представления является модулем, который формирует экран дисплея. Модуль 154 представления включает в себя мультимедийный модуль 154-1 для воспроизведения контента и вывода контента и модуль 154-2 Интерфейса пользователя (UI) и графики для обработки UI и графики. Мультимедийный модуль 154-1 может включать в себя модуль проигрывателя, модуль видеокамеры, модуль обработки звука и/или т.п. Соответственно, мультимедийный модуль 154-1 формирует экран и звук путем воспроизведения различного контента и воспроизводит их. Модуль 154-2 UI и графики может включать в себя модуль компоновки изображений для объединения изображений, модуль объединения координат для объединения координат на экране, чтобы отображать изображение и формировать координаты, модуль X11 для приема различных событий от аппаратных средств и инструментарий 2D/3D UI для предоставления инструмента для конфигурирования UI в формате 2D или 3D.
[235] Модуль 155 веб-обозревателя является модулем, который выполняет просмотр веб-страниц и обращается к веб-серверу. Модуль 155 веб-обозревателя может включать в себя модуль веб-просмотра для визуализации и просмотра веб-страницы, модуль агента загрузки для загрузки, модуль закладок, модуль веб-средств и/или т.п.
[236] Модуль 156 обработки контента относится к программному обеспечению для обработки контента, сохраненного в запоминающем устройстве 150. Модуль обработки контента может включать в себя модуль 156-1 определения возможности воспроизведения, анализатор 156-2, кодек 156-3 и/или т.п. Модуль 156-1 определения возможности воспроизведения является программой, которая работает в качестве алгоритма для сравнения информации о возможности воспроизведения и атрибутов контента. Анализатор 156-2 и кодек 156-3 являются программным обеспечением, которое предоставляется видеопроцессору 175 для обработки контента. Анализатор 156-2 обычно реализуется с использованием программного обеспечения, а кодек 156-3 реализуется с использованием программного обеспечения или аппаратных средств.
[237] К тому же запоминающее устройство 150 может дополнительно включать в себя различные модули приложений, например модуль навигационной службы, игровой модуль и/или т.п.
[238] В соответствии с различными вариантами осуществления из настоящего раскрытия изобретения некоторые из различных программных модулей, проиллюстрированных на фиг. 14, можно изъять, изменить или добавить в соответствии с типом и характеристикой гибкого устройства 100. Например, когда гибкое устройство 100 является смартфоном, можно дополнительно включить приложение чтения электронных книг, игровое приложение и другие обслуживающие программы. Также можно изъять некоторые из программных модулей из фиг. 14.
[239] В соответствии с различными вариантами осуществления из настоящего раскрытия изобретения, когда проводится манипуляция пользователя для удержания состояния изгиба у гибкого устройства 100, контроллер 130 может обеспечить пользователю соответствующую обратную связь. Подробное описание этого будет предоставлено со ссылкой на фиг. 15A и 15B.
[240] Фиг. 15A и 15B - изображения для иллюстрации способа обеспечения обратной связи у гибкого устройства в соответствии с вариантом осуществления из настоящего раскрытия изобретения.
[241] Ссылаясь на фиг. 15A и 15B, предполагается, что дисплей 140 предоставляется на одной поверхности гибкого устройства 100 и изгибается вместе с гибким устройством 100.
[242] Например, в соответствии с различными вариантами осуществления из настоящего раскрытия изобретения, как проиллюстрировано на фиг. 15A, когда дисплей 140 изгибается с помощью первой изгибающей манипуляции, а затем вторая изгибающая манипуляция выполняется в направлении, противоположном первой изгибающей манипуляции, контроллер 130 может изменить цвет области, которая изгибается с помощью второй изгибающей манипуляции, или может изменить цвет линии изгиба, которая образуется с помощью второй изгибающей манипуляции.
[243] В качестве другого примера в соответствии с различными вариантами осуществления из настоящего раскрытия изобретения, как проиллюстрировано на фиг. 15B, когда дисплей 140 изгибается с помощью первой изгибающей манипуляции, а затем вторая изгибающая манипуляция выполняется в направлении, противоположном первой изгибающей манипуляции, контроллер 130 может вывести предварительно определенный предупредительный звук через динамик 185. Также контроллер 130 может осуществлять управление для вывода речи, информирующей, что проводится манипуляция пользователя для удержания состояния изгиба у гибкого устройства 100.
[244] Соответственно, пользователь может идентифицировать, что проводится правильная изгибающая манипуляция для удержания состояния изгиба.
[245] В соответствии с различными вариантами осуществления из настоящего раскрытия изобретения, когда дисплей 140 предоставляется на одной поверхности или противоположных поверхностях гибкого устройства 100 и изгибается, когда изгибается гибкое устройство 100, а затем состояние изгиба фиксируется, контроллер 130 может отобразить экран на каждой области дисплея 140, который разделяется путем изгиба. Подробное объяснение этого будет предоставлено со ссылкой на фиг. 16.
[246] Фиг. 16, 17 и 18 - изображения для иллюстрации способа отображения экрана, когда гибкое устройство зафиксировано в состоянии изгиба в соответствии с вариантом осуществления из настоящего раскрытия изобретения.
[247] Ссылаясь на фиг. 16, 17 и 18, гибкое устройство 100 зафиксировано, контроллер 130 может разделить область отображения у дисплея 140 на множество областей отображения в соответствии с состоянием изгиба у гибкого устройства 100 и может отобразить экран на каждой из множества областей отображения.
[248] В частности, контроллер 130 разделяет дисплей 140 на две области относительно линии изгиба, которая образуется путем изгиба дисплея 140, и вычисляет размер каждой области с использованием местоположения, где образуется линия изгиба. Контроллер 130 может масштабировать экран в соответствии с вычисленным размером и может отобразить экран.
[249] В то же время контроллер 130 может отобразить одинаковый экран или разные экраны на областях разделения.
[250] Например, как проиллюстрировано на фиг. 16 и 17, можно предположить, что изгибается дисплей 140, на котором отображается изображение 210, и можно предположить, что состояние изгиба фиксируется в соответствии с манипуляцией пользователя.
[251] В этом случае, как показано на фиг. 16, контроллер 130 уменьшает размер изображения 210 в соответствии с размером первой области 140-1 разделения и второй области 140-2 разделения и отображает уменьшенные изображения 220 и 230 соответственно на первой области 140-1 разделения и второй области 140-2 разделения.
[252] В соответствии с различными вариантами осуществления из настоящего раскрытия изобретения, как показано на фиг. 17, контроллер 130 может уменьшить размер изображения 210 и отобразить уменьшенное изображение 220 на первой области 140-1 разделения. Однако контроллер 130 может отобразить на второй области 140-2 разделения экран 240 виджетов, включающий в себя виджет погоды, виджет времени и виджет заметок. Например, в соответствии с различными вариантами осуществления из настоящего раскрытия изобретения контроллер 130 может осуществлять управление для отображения разных изображений или экранов на различных областях разделения (например, первой области 140-1 разделения и второй области 140-2 разделения). В соответствии с различными вариантами осуществления из настоящего раскрытия изобретения контроллер 130 может использовать заданные изгибом области разделения в качестве областей, в которых нужно отображать соответствующий экран, который может быть несвязанным или иным образом независимым от экрана, отображенного на другой из областей разделения.
[253] В соответствии с различными вариантами осуществления из настоящего раскрытия изобретения, когда исполняется приложение, и экран исполнения приложения отображается на дисплее 140, контроллер 130 может отобразить главное меню и вложенное меню исполняемого приложения на областях разделения.
[254] Например, как проиллюстрировано на фиг. 18, можно предположить, что дисплей 140 изгибается и фиксируется, когда запускается приложение обмена сообщениями, и на дисплее 140 может отображаться список 250, включающий в себя других пользователей и подробности обмена сообщениями. В этом случае контроллер 130 может уменьшить размер списка 250 подробностей обмена сообщениями и отобразить уменьшенный список 260 на первой области 140-1 разделения, и может отобразить экран 270, включающий в себя сообщения, которыми пользователь обменивается с определенным пользователем, на второй области 140-2 разделения. Например, контроллер 130 может отобразить экран 270 сообщений, который является вложенным меню списка 250, на второй области 140-2 разделения.
[255] Фиг. 19 - изображение, иллюстрирующее пример формы гибкого устройства в соответствии с вариантом осуществления из настоящего раскрытия изобретения.
[256] Ссылаясь на фиг. 19, гибкое устройство 100 включает в себя корпус 310, дисплей 140 и участок 320 захвата.
[257] Корпус 310 может служить в качестве оболочки, включающей в себя дисплей 140. Корпус 310 включает в себя вращающийся ролик для сворачивания дисплея 140. Соответственно, когда не используется, дисплей 140 можно обернуть вокруг вращающегося ролика и вставить в корпус 310.
[258] Когда пользователь удерживает участок 320 захвата и вытягивает дисплей 140, вращающийся ролик вращается в направлении, противоположном сворачиванию, и сворачивание ослабляется, чтобы дисплей 140 извлекался из корпуса 310, так что дисплей выходит из корпуса 310. На вращающемся ролике можно предусмотреть стопорный механизм. Соответственно, когда пользователь вытягивает участок 320 захвата больше чем на предварительно определенное расстояние, вращение вращающегося ролика останавливается стопорным механизмом, и дисплей 140 можно зафиксировать.
[259] В соответствии с различными вариантами осуществления из настоящего раскрытия изобретения, когда пользователь нажимает на кнопку (не показана) в корпусе 310, чтобы освободить стопорный механизм, стопорный механизм освобождается, и вращающийся ролик вращается в обратном направление. В результате дисплей 140 сворачивается в корпус 310. Стопорный механизм может иметь форму переключателя для остановки работы привода для вращения вращающегося ролика. Поскольку вращающийся ролик и стопорный механизм могут применять конструкцию сворачивания в соответствии с предшествующим уровнем техники, их подробная иллюстрация и объяснение пропускаются.
[260] В соответствии с различными вариантами осуществления из настоящего раскрытия изобретения корпус 310 включает в себя источник питания (не показан). Источник питания (не показан) можно реализовать с использованием разъема батареи, в который устанавливается одноразовая батарея, вторичного элемента, который может заряжаться и использоваться пользователем несколько раз, и солнечного элемента, который формирует электричество с использованием солнечного тепла. Когда источник питания реализуется с использованием вторичного элемента, пользователь может подключать корпус 310 к внешнему источнику питания посредством провода и может заряжать источник питания (не показан).
[261] Как проиллюстрировано на фиг. 19, корпус 310 имеет цилиндрическую форму. Однако в соответствии с различными вариантами осуществления из настоящего раскрытия изобретения форма корпуса 3100 может быть четырехугольной, другой многоугольной формой или т.п.
[262] Фиг. 20 - изображение, иллюстрирующее пример формы гибкого устройства в соответствии с вариантом осуществления из настоящего раскрытия изобретения.
[263] Ссылаясь на фиг. 20, источник 180 питания предоставляется на одном крае гибкого устройства и является присоединяемым и отсоединяемым.
[264] Источник 180 питания изготавливается из гибкого материала и может изгибаться вместе с дисплеем 140. В частности, источник 180 питания включает в себя катодный коллектор, катодный электрод, электролит, анодный электрод, анодный коллектор и оболочку, покрывающую вышеупомянутые элементы.
[265] Например, коллектор можно реализовать с использованием сплава, например TiNi, обладающего хорошей упругостью, металла, например меди и алюминия, проводящего материала, например металла, покрытого углеродом, углерода и углеродного волокна, проводящего полимера, например полипиррола, и/или т.п.
[266] Катодный электрод можно произвести с помощью отрицательного электродного материала, например металла, такого как литий, натрий, цинк, магний, кадмий, сплав хранения водорода и свинец, неметалла, такого как углерод, и высокополимерного электродного материала, такого как органическое соединение серы, и/или т.п.
[267] Анодный электрод можно произвести с помощью положительного электродного материала, например серы и сульфида металла, литиевой окиси переходного металла, например LiCoO2, и полимерного электродного материала, например SOCl2, MnO2, Ag2O, Cl2, NiCl2, NiOOH и/или т.п. Электролит можно реализовать в виде геля, используя PEO, PVdF, PMMA и PVAC.
[268] Оболочка может использовать обычную полимерную смолу. Например, может использоваться PVC, HDPE или эпоксидная смола, и/или т.п. К тому же для оболочки может использоваться любой материал, который может предотвратить повреждение элемента проводника и который является свободно гнущимся или сгибаемым.
[269] Каждый из анодного электрода и катодного электрода в источнике 180 питания может включать в себя разъем для электрического подключения к внешнему источнику.
[270] Ссылаясь на фиг. 20, разъем выступает из источника 180 питания, и на дисплее 140 образуется выемка, соответствующая местоположению, размеру и форме разъема. Соответственно, источник 180 питания соединяется с дисплеем 140, когда разъем и выемка подключаются друг к другу. Разъем источника 180 питания подключается к контактной площадке (не показана) гибкого устройства 100 для подачи питания к гибкому устройству 100.
[271] Хотя источник 180 питания присоединяется или отсоединяется от одного края гибкого устройства 100 на фиг. 20, такая конфигурация является лишь примером. В соответствии с различными вариантами осуществления из настоящего раскрытия изобретения местоположение и форма источника 180 питания может меняться в соответствии с характеристикой изделия. Например, когда гибкое устройство 100 имеет предварительно определенную толщину, источник 180 питания можно смонтировать на задней поверхности гибкого устройства 100.
[272] Фиг. 21 - блок-схема алгоритма для иллюстрации способа управления гибким устройством в соответствии с вариантом осуществления из настоящего раскрытия изобретения.
[273] Ссылаясь на фиг. 21, на этапе S410 обнаруживается изгиб гибкого устройства.
[274] После этого на этапе S420, когда принимается предварительно определенный ввод, пока гибкое устройство изгибается, удерживается состояние изгиба у гибкого устройства.
[275] В частности, сохраняется информация о состоянии изгиба у гибкого устройства, а когда принимается предварительно определенный ввод, состояние изгиба у гибкого устройства удерживается с использованием сохраненной информации. Информация о состоянии изгиба может включать в себя по меньшей мере одно из области изгиба, угла изгиба и направления изгиба у гибкого устройства. Это описано выше со ссылкой на фиг. 7A и 7B.
[276] В соответствии с различными вариантами осуществления из настоящего раскрытия изобретения, когда гибкое устройство изгибается, а затем разгибается в направлении, противоположном направлению, в котором изгибается гибкое устройство, в пределах предварительно определенного времени, то удерживается состояние изгиба у гибкого устройства.
[277] Например, когда первая изгибающая манипуляция выполняется в первом направлении, в котором центральная область гибкого устройства гнется вверх или вниз, а вторая изгибающая манипуляция выполняется на краевой области гибкого устройства во втором направлении, которое противоположно первому направлению, в пределах предварительно определенного времени, то удерживается состояние изгиба у гибкого устройства.
[278] В отличие от этого в соответствии с различными вариантами осуществления из настоящего раскрытия изобретения, когда вводится команда освобождения и при этом гибкое устройство изогнуто, гибкое устройство может вернуться к плоскому состоянию. Команда освобождения может вводиться с помощью по меньшей мере одной из манипуляции кнопкой для выбора кнопки, предусмотренной на корпусе гибкого устройства, и изгибающей манипуляции для изгиба предварительно определенной области гибкого устройства. Однако такую конфигурацию не следует рассматривать как ограничивающую, и команда освобождения может вводиться в соответствии с различными способами.
[279] В соответствии с различными вариантами осуществления из настоящего раскрытия изобретения, когда гибкое устройство включает в себя сгибаемый дисплей, и гибкое устройство зафиксировано, область отображения дисплея можно разделить на множество областей отображения в соответствии с состоянием изгиба у гибкого устройства, и экран может отображаться на каждой из множества областей отображения. Такая конфигурация описана выше со ссылкой на фиг. 16-18.
[280] В соответствии с различными вариантами осуществления из настоящего раскрытия изобретения может предоставляться долговременный машиночитаемый носитель, который хранит программу, которая выполняет способ управления в соответствии с различными вариантами осуществления из настоящего раскрытия изобретения.
[281] Долговременный машиночитаемый носитель относится к носителю, который хранит данные полупостоянно вместо хранения данных в течение очень короткого времени, например в регистре, кэше и памяти, и считывается устройством. В частности, различные вышеописанные приложения или программы могут храниться на долговременном машиночитаемом носителе, например компакт-диске (CD), цифровом универсальном диске (DVD), жестком диске, диске Blu-ray, универсальной последовательной шине (USB), карте памяти и постоянном запоминающем устройстве (ROM), и могут предоставляться.
[282] На блок-схеме устройства отображения шина не проиллюстрирована. Однако элементы устройства отображения могут взаимодействовать друг с другом посредством шины. Также устройство отображения может дополнительно включать в себя процессор, например CPU и микропроцессор, для выполнения различных вышеописанных операций.
[283] Несмотря на то, что настоящее раскрытие изобретения показано и описано со ссылкой на его различные варианты осуществления, специалистам в данной области техники будет понятно, что в нем могут быть сделаны различные изменения в форме и деталях без отклонения от сущности и объема настоящего раскрытия изобретения, которые определены прилагаемой формулой изобретения и ее эквивалентами.
Реферат
Предоставляется гибкое устройство. Гибкое устройство включает в себя датчик, сконфигурированный для обнаружения изгиба гибкого устройства, приспособление удержания изгиба, сконфигурированное для поддержки состояния изгиба у гибкого устройства, и контроллер, сконфигурированный для управления операциями гибкого устройства, причем контроллер управляет приспособлением удержания изгиба для поддержки состояния изгиба у гибкого устройства, когда принимается предварительно определенный ввод, пока гибким устройством манипулируют. 2 н. и 13 з.п. ф-лы, 30 ил.
Комментарии