Системы с использованием газообразной среды и способы для перемещения дискретных изделий - RU2586985C2
Код документа: RU2586985C2
Чертежи





























Описание
Область применения
Настоящее изобретение в целом относится к способам и устройствам для перемещения дискретных изделий, и в частности, относится к способам и устройствам, в которых применяются системы с использованием газообразной среды для перемещения дискретных изделий с первого движущегося несущего элемента на второй движущийся несущий элемент.
Уровень техники
Абсорбирующие изделия, такие, как, например, подгузники с ленточным креплением или подгузники-трусы, могут изготавливаться на технологической линии, на которой та или иная часть изделия, например, базовая часть подгузника с ленточным креплением или подгузника-трусов, включающая, например, верхний лист, тыльный лист и абсорбирующую сердцевину, накладывается на одно или более движущихся полотен, из которых формируются другие компоненты, например, на полотна, из которых формируют переднюю и заднюю поясные части. Перенос дискретных изделий осуществляется с помощью элементов перемещения, входящих в состав систем перемещения. Скорость, с которой дискретные изделия подаются на тот или иной этап технологического процесса на первом движущемся несущем элементе, часто не совпадает со скоростью второго движущегося несущего элемента, на котором расположено движущееся полотно его дополнительных компонентов. Соответственно, скорость дискретного изделия должна быть изменена системой перемещения, до ее совпадения, или практического совпадения со скоростью полотен, из которых формируются дополнительные компоненты изделия, расположенных на втором движущемся несущем элементе, так, чтобы дискретные изделия должным образом накладывались на движущиеся полотна компонентов, во избежание нарушений технологического процесса или качества конечного продукта, изготавливаемого в данном процессе. В некоторых случаях система перемещения должна также поворачивать дискретные изделия (например, примерно на 90°) и изменять их шаг после снятия с первого движущегося несущего элемента и перед их укладкой на второй движущийся несущий элемент. Система перемещения может также иметь раму, определяющую ось, и множество элементов перемещения, вращающихся вокруг данной оси. Во время своего вращения элементы перемещения системы перемещения могут проходить мимо первого движущегося несущего элемента, подхватывая с него дискретные изделия, и проходить далее мимо второго движущегося несущего элемента, сбрасывая на него дискретные изделия.
Одна из многих проблем, связанных с системами перемещения в соответствии с существующим уровнем техники, заключается в том, что они могут работать только с относительно малой скоростью (примерно 500 дискретных изделий в минуту), чтобы обеспечить требуемую точность переноса дискретных изделий. При работе существующих систем перемещения на более высоких скоростях (более 1000 дискретных изделий в минуту) требуемой точности их перемещения, как правило, не достигается. При работе существующих систем перемещения на еще более высоких скоростях дискретные изделия могут складываться сами с собой, или смещаться от требуемого положения переноса, в результате чего готовые изделия или их части получаются деформированными.
Более того, в существующих системах перемещения, как правило, используются элементы перемещения, имеющие точно подобранную форму поверхности перемещения для каждой конкретной операции. Такие поверхности перемещения с тщательно подобранной формой могут быть пригодны для операции подхвата дискретных изделий или для операции их сброса, но не одновременно для обеих данных операций. Так, например, если поверхность перемещения имеет профиль дуги, протяженной в направлении движения в машине, что удобно для подхвата, после чего поверхность перемещения поворачивается на 90°, кривизна поверхности перемещения в целом не будет подходящей для сброса дискретного изделия в поперечном направлении, потому что дистальные края поверхности перемещения относительно направления, поперечного движению в машине, в целом не будут находиться достаточно близко ко второму движущемуся несущему элементу, то есть управляемость перемещения дискретного изделия в такой системе будет плохой.
Кроме того, если в существующих системах перемещения используются плоские, или в сущности плоские поверхности перемещения, то головной край поверхности перемещения может быть расположен достаточно близко к движущемуся несущему элементу, между средней частью поверхности перемещения и движущимся несущим элементом может иметься большой зазор, а хвостовая часть поверхности перемещения опять же может быть расположена достаточно близко к движущемуся несущему элементу. Большой зазор между средней частью поверхности перемещения и движущимся несущим элементом в точке переноса дискретного изделия и/или непостоянная величина зазора могут создавать множество проблем, таких, как, например, неправильное перемещение и/или деформация изделий или их частей, или их полный брак, например, сложенные друг с другом края или углы изделия. Разброс в величине зазора может также приводить к неправильной ориентации изделия при его укладке на движущееся полотно компонентов на втором движущемся несущем элементе, что опять же может приводить к деформации изделий или их частей, или к полному браку изделий.
Еще одной проблемой, присущей существующим системам перемещения, является проблема, связанная с системами управления газообразной средой, используемыми для удержания дискретных изделий на поверхностях перемещения во время переноса дискретных изделий с первого движущегося несущего элемента на второй движущийся несущий элемент. Давление газообразной среды, например, разрежение, как правило, включается или выключается одновременно по всей поверхности перемещения. Давление газообразной среды может воздействовать на дискретные компоненты через отверстия в поверхности перемещения. На начальном этапе переноса дискретного изделия с первого движущегося несущего элемента на поверхность перемещения основная часть вакуума в хвостовой части поверхности перемещения стравливается в атмосферу, что приводит к потерям энергии, которые не являются необходимыми для операции перемещения. Во время переноса дискретного изделия на второй движущийся несущий элемент в головной части поверхности перемещения еще может поддерживаться разрежение даже после того, как головная часть дискретного изделия уже перенесена на второй движущийся несущий элемент (или должна быть перенесена), в результате чего хвостовая часть дискретного изделия остается прикрепленной к головной части поверхности перемещения. Это может приводить к неправильному переносу дискретных изделий, поскольку хвостовая часть дискретного изделия может задерживаться на головной части поверхности перемещения, хотя она должна уже быть уложена на второй движущийся несущий элемент. Это может вызывать особенные проблемы при высоких скоростях переноса (более 1000 дискретных изделий в минуту). В других случаях дискретные изделия могут сдуваться с поверхностей перемещения путем приложения положительного давления газообразной среды к дискретным изделиям через отверстия в поверхностях перемещения. Сдувание изделий обычно производится, когда головная часть дискретного изделия уже перенесена на второй движущийся несущий элемент. В результате этого хвостовая часть дискретного изделия после его сдувания становится неуправляемой еще до ее полного переноса на второй движущийся несущий элемент. Потеря управления хвостовой частью дискретного изделия после его сдувания также может приводить к неправильному переносу дискретных изделий. Это может быть особенной проблемой, если дискретное изделие содержит натянутые эластичные элементы, которые могут самопроизвольно сократиться, выйдя из под контроля со стороны поверхности перемещения или движущегося несущего элемента.
Еще одной проблемой, присущей существующим системам перемещения, является механизм вращения элементов перемещения, в качестве которого обычно используется кулачковый барабан. Кулачковый барабан дорог в изготовлении и обычно требует интенсивного технического обслуживания, включая частую смазку и очистку. Это часто требует разборки машины и приводит к длительному простою оборудования.
Поэтому существует потребность в системах перемещения и их компонентах, которые позволили бы преодолеть недостатки существующих систем перемещения, и обеспечивали бы перемещение дискретных изделий на более высоких скоростях при сохранении лучшей управляемости дискретного изделия во всех точках их переноса.
Сущность изобретения
Одно из воплощений настоящего изобретения относится к способу приложения давления газообразной среды к части элемента перемещения системы перемещения. Система перемещения содержит раму, определяющую первую ось вращения. Элемент перемещения вращается вокруг первой оси вращения. Часть элемента перемещения содержит головную часть и хвостовую часть при ее вращении вокруг первой оси вращения. Часть элемента перемещения выполнена с возможностью вращения вокруг второй оси вращения между первым положением и вторым положением во время вращения вокруг первой оси вращения. Способ содержит этапы: обеспечения трубопровода газообразной среды, связанного по газообразной среде с головной частью или хвостовой частью части элемента перемещения, когда часть элемента перемещения находится в первом положении, вращения части элемента перемещения между первым положением и вторым положением, и поддержания связи по газообразной среде трубопровода газовой среды с той же частью: головной или хвостовой - части элемента перемещения после того, как часть элемента перемещения перешла во второе положение.
Еще в одном воплощении настоящего изобретения предлагается система перемещения для переноса гибких дискретных изделий на движущийся несущий элемент или с движущегося несущего элемента. Система перемещения содержит раму, определяющую первую ось вращения, и элемент перемещения, имеющий возможность вращения вокруг первой оси вращения. Часть элемента перемещения имеет возможность вращения между первым положением и вторым положением вокруг второй оси вращения при вращении элемента перемещения вокруг первой оси вращения. Первая ось вращения является протяженной в первом направлении, а вторая ось вращения является протяженной во втором направлении, отличном от первого направления. Часть элемента перемещения содержит первую зону, вторую зону, третью зону и четвертую зону. Система перемещения содержит первый трубопровод газообразной среды, связанный по газообразной среде с первой зоной и второй зоной, когда часть элемента перемещения находится в первом положении, и связанный по газообразной среде с первой зоной и третьей зоной, когда часть элемента перемещения находится во втором положении. Система перемещения содержит второй трубопровод газообразной среды, связанный по газообразной среде с третьей зоной и четвертой зоной, когда часть элемента перемещения находится в первом положении, и связанный по газообразной среде с четвертой зоной и второй зоной, когда часть элемента перемещения находится во втором положении.
Еще в одном воплощении настоящего изобретения предлагается система перемещения для переноса дискретных изделий на движущийся несущий элемент или с движущегося несущего элемента. Система перемещения содержит элемент перемещения, содержащий часть, содержащую головную часть и хвостовую часть при его вращении вокруг первой оси вращения. Часть элемента перемещения имеет возможность вращения вокруг второй оси вращения между первым положением и вторым положением при вращении вокруг первой оси вращения. Часть элемента перемещения содержит первую зону, вторую зону, третью зону и четвертую зону. Первая зона и вторая зона по меньшей мере частично образуют хвостовую или головную часть части элемента перемещения, когда часть элемента перемещения находится в первом положении. Первая зона или вторая зона и третья зона или четвертая зона по меньшей мере частично образуют ту же самую часть: хвостовую часть или головную часть - части элемента перемещения, когда часть элемента перемещения находится во втором положении. Система перемещения содержит трубопровод газообразной среды, связанный по газообразной среде с первой зоной и второй зоной, когда часть элемента перемещения находится в первом положении, и связанный по газообразной среде с первой зоной или второй зоной, и с третьей зоной или четвертой зоной, когда часть элемента перемещения находится во втором положении.
Краткое описание чертежей
Упомянутые выше и прочие отличительные особенности и преимущества настоящего изобретения, а также способы их достижения и все изобретение в целом будут более понятны из нижеследующего описания не ограничивающих воплощений настоящего изобретения в совокупности с прилагаемыми чертежами.
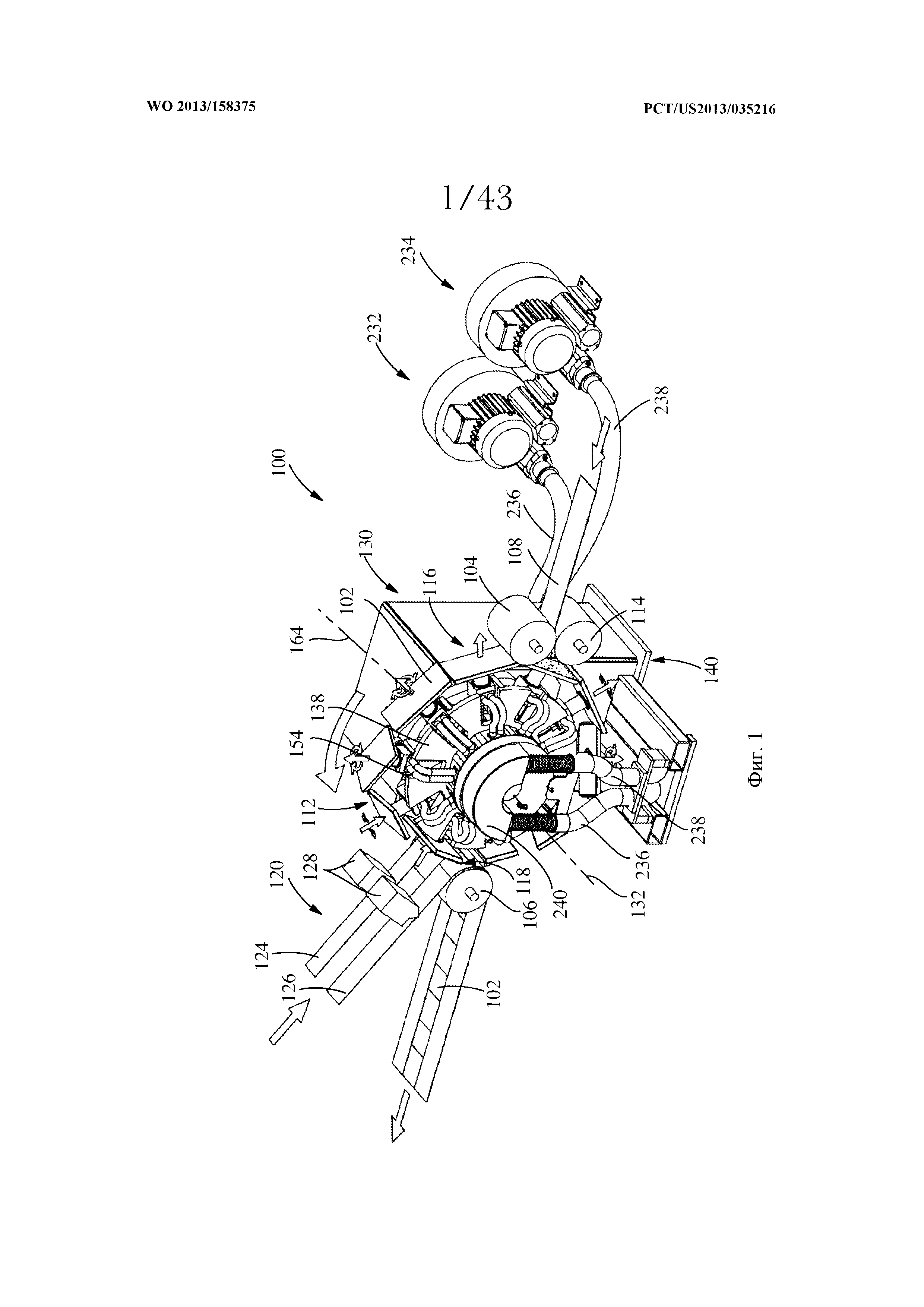
Фиг. 1. Аксонометрический вид спереди системы перемещения для переноса дискретных изделий с первого движущегося несущего элемента на второй движущийся несущий элемент, в соответствии с одним не ограничивающим воплощением настоящего изобретения.
Фиг. 2. Аксонометрический вид подгузника-трусов в соответствии с одним не ограничивающим воплощением настоящего изобретения.
Фиг. 3. Схематическое изображение абсорбирующего изделия, из которого может быть сформирован подгузник-трусы, изображенный на фиг. 2, в соответствии с одним не ограничивающим воплощением настоящего изобретения.
Фиг. 4. Вид спереди системы перемещения, изображенной на фиг. 1.
Фиг. 5. Вид сверху системы перемещения, изображенной на фиг. 1.
Фиг. 6. Аксонометрический вид сзади системы перемещения, изображенной на фиг. 1.
Фиг. 7. Вид сзади части системы перемещения, изображенной на фиг. 1.
Фиг. 8. Аксонометрический вид сзади части системы перемещения, изображенной на фиг. 1.
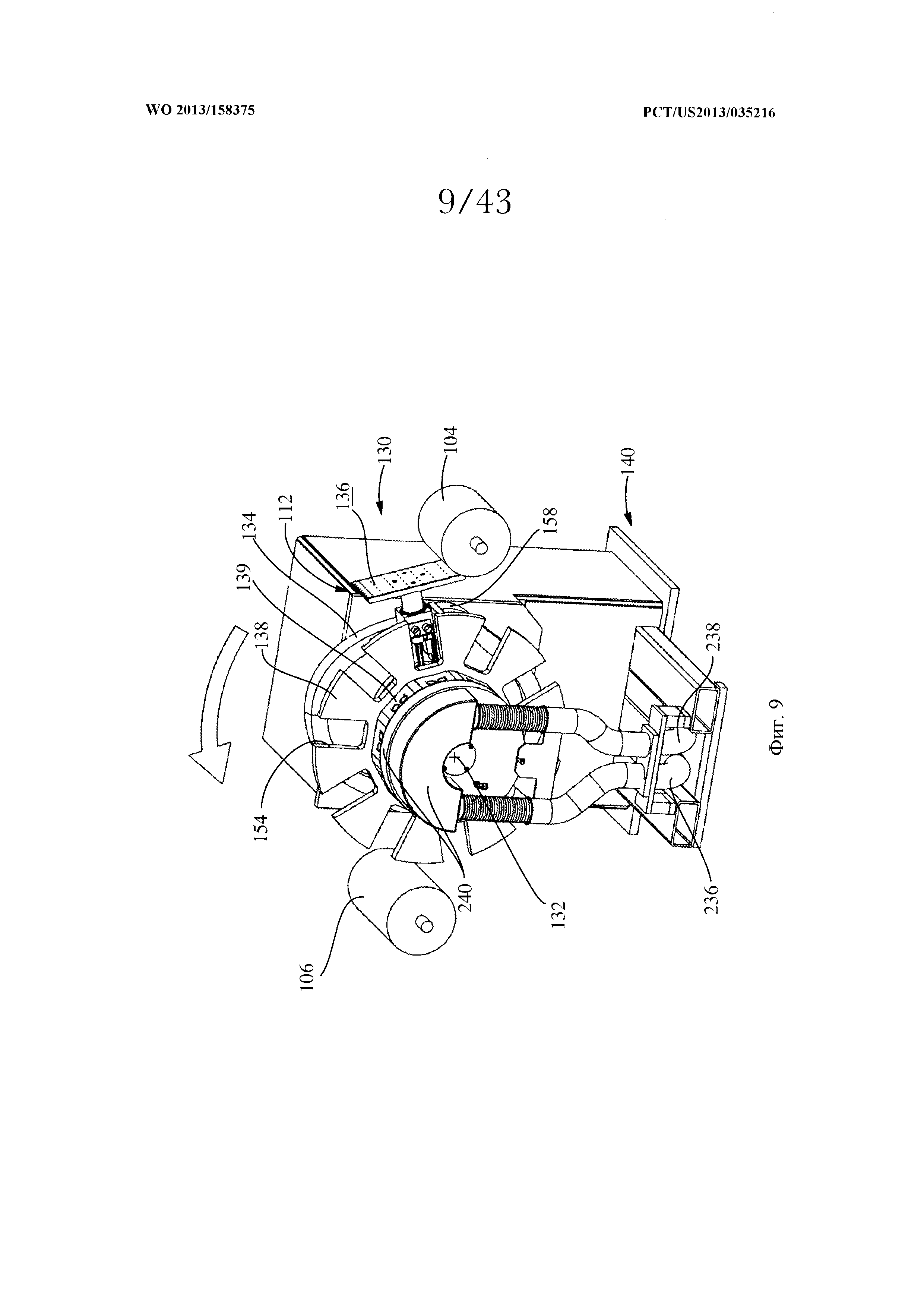
Фиг. 9. Упрощенный аксонометрический вид спереди системы перемещения дискретных изделий в соответствии с одним не ограничивающим воплощением настоящего изобретения.
Фиг. 10. Вид сзади двух дорожек и элемента перемещения, а также узла вращения, находящегося в подвижном зацеплении с двумя дорожками, в соответствии с одним не ограничивающим воплощением настоящего изобретения.
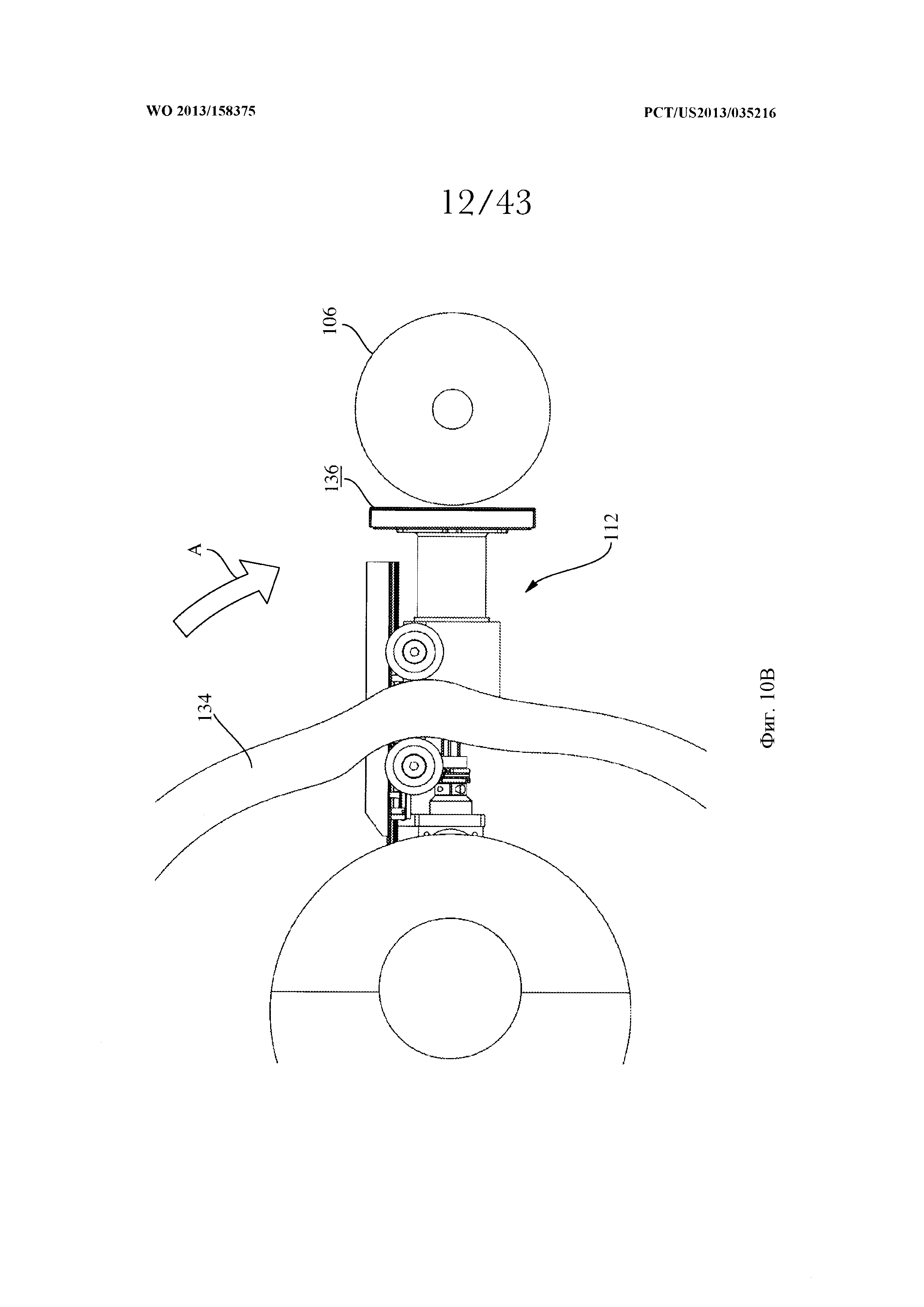
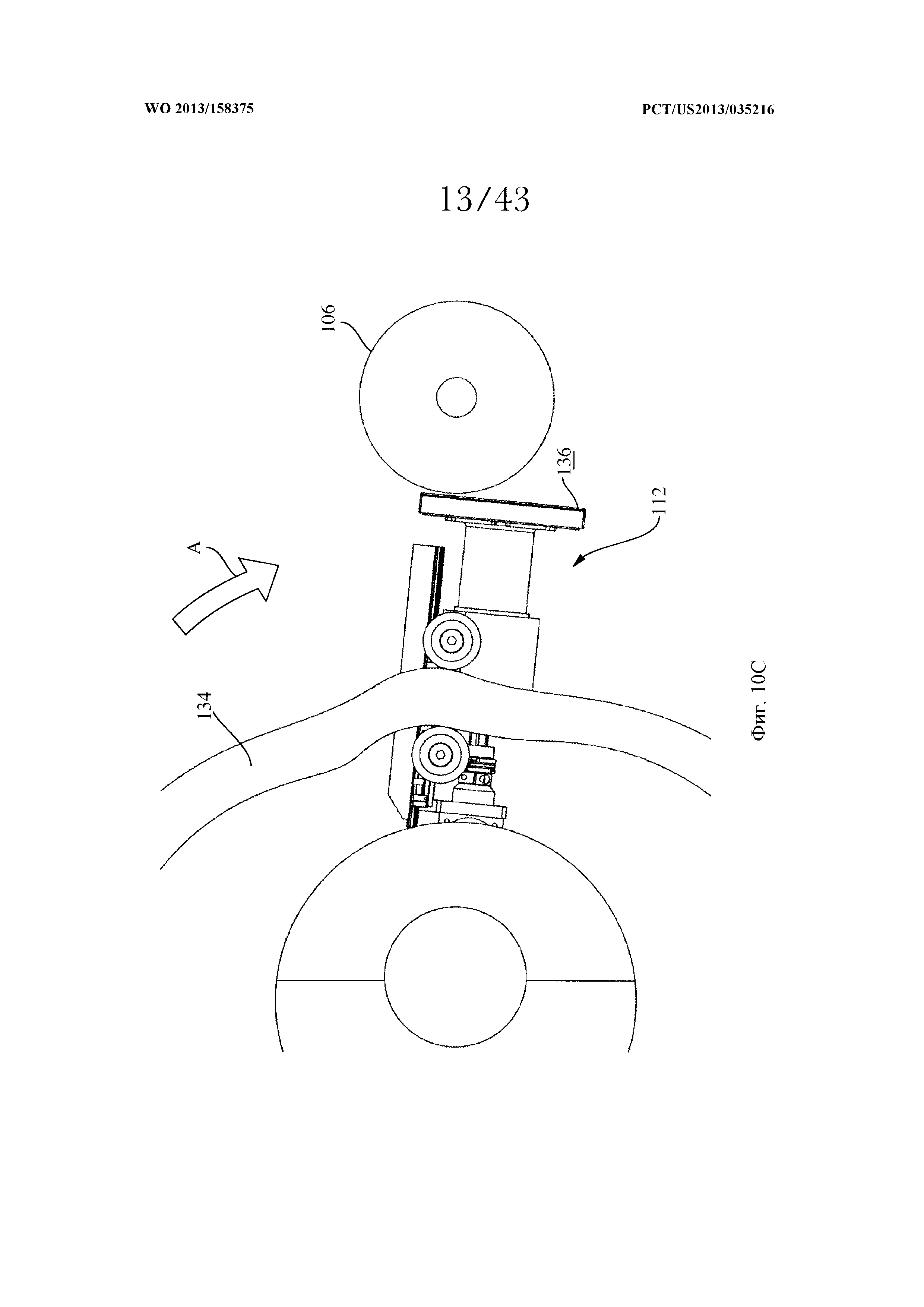
Фиг. 10А-10С. Виды сзади части системы перемещения, имеющей элемент перемещения и поверхность перемещения. Показаны последовательные этапы движения поверхности перемещения относительно второго движущегося несущего элемента, в соответствии с различными не ограничивающими воплощениями изобретения.
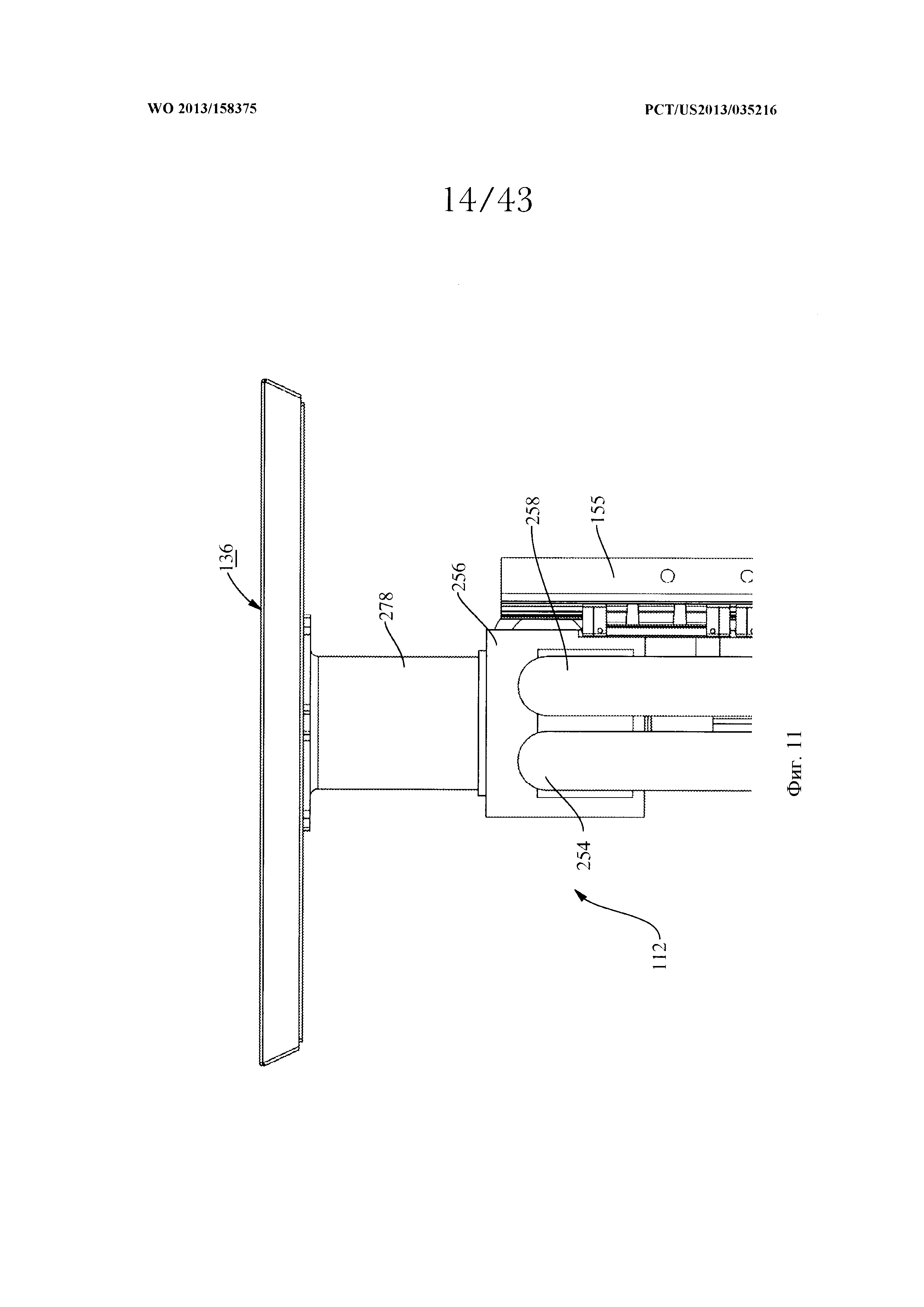
Фиг. 11. Вид сбоку части элемента перемещения, содержащей плоскую или в сущности плоскую поверхность перемещения в соответствии с одним не ограничивающим воплощением изобретения.
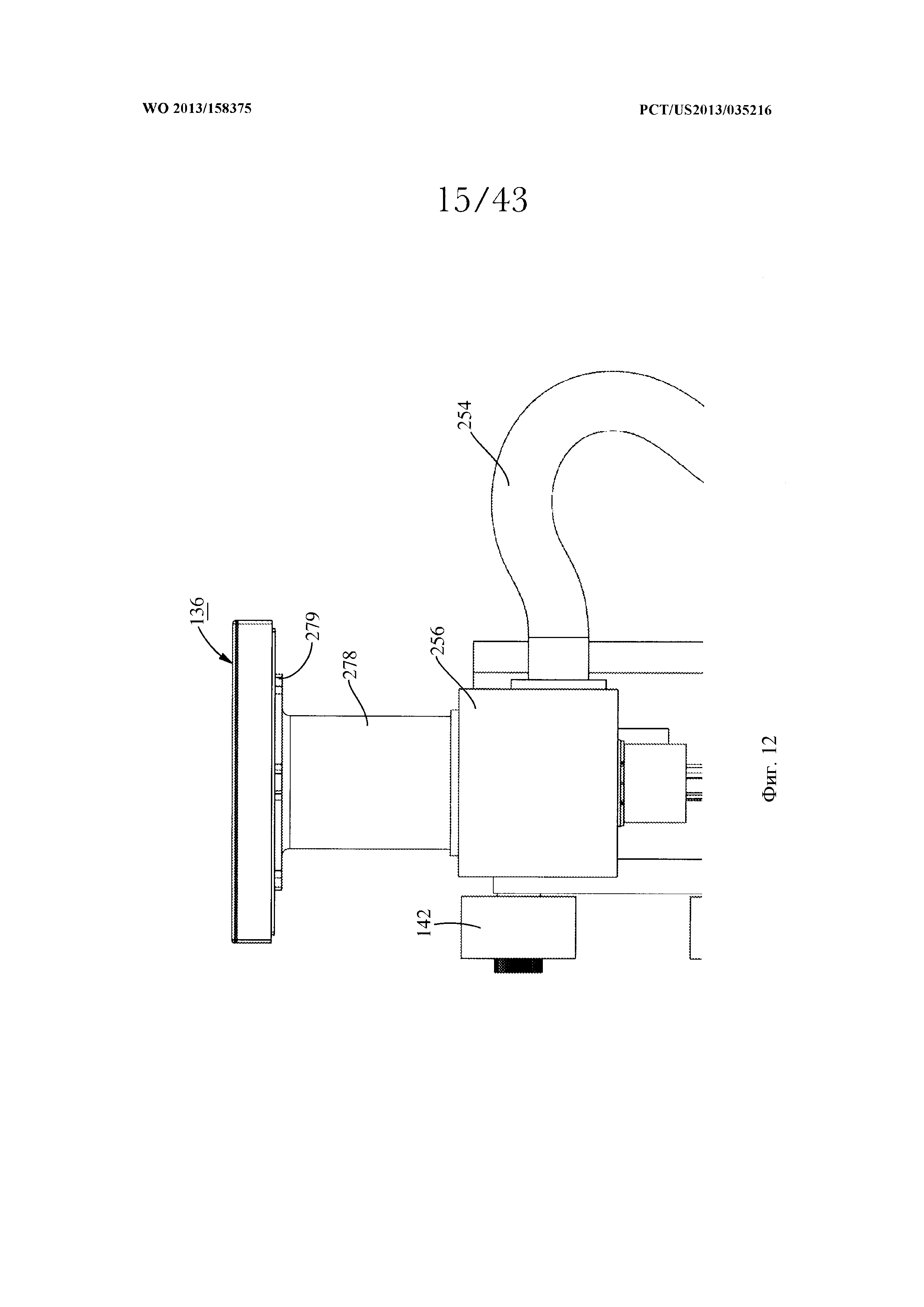
Фиг. 12. Вид спереди части элемента перемещения, изображенной на фиг. 11 и имеющей плоскую или в сущности плоскую поверхность перемещения.
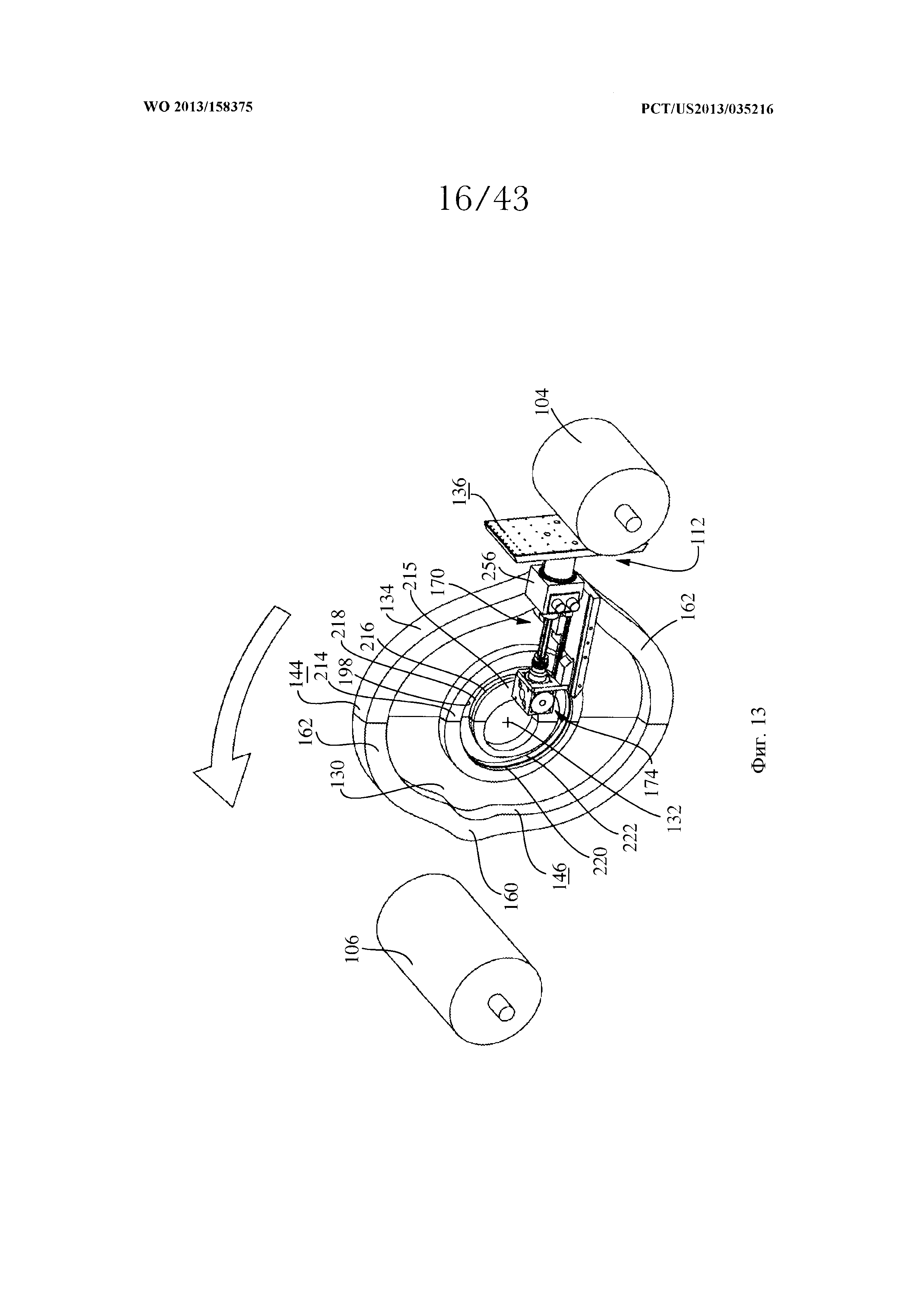
Фиг. 13. Аксонометрический вид спереди двух дорожек, узла вращения и элемента перемещения в зоне подхвата, когда поверхность перемещения находится в первом положении, в соответствии с одним не ограничивающим воплощением настоящего изобретения.
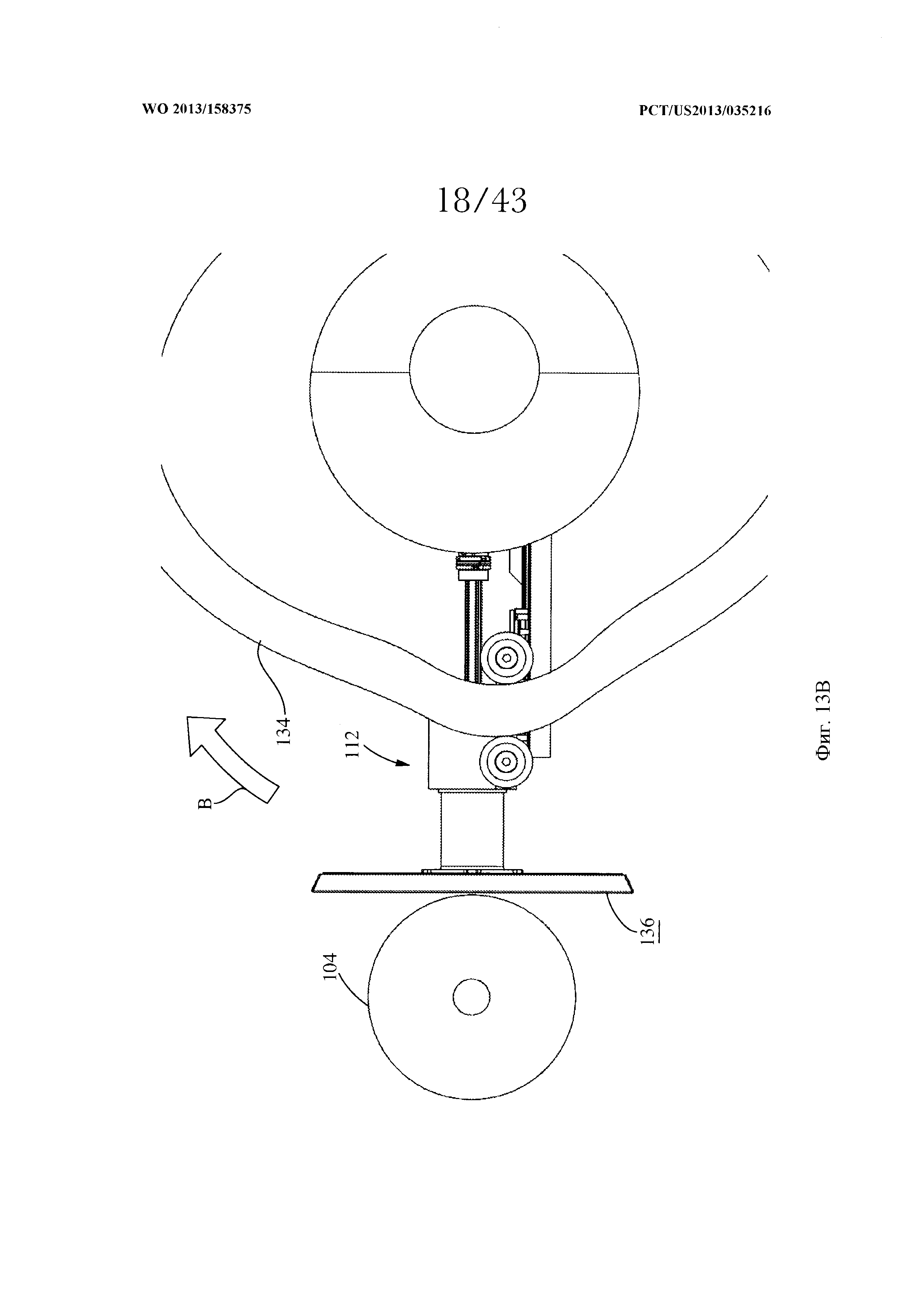
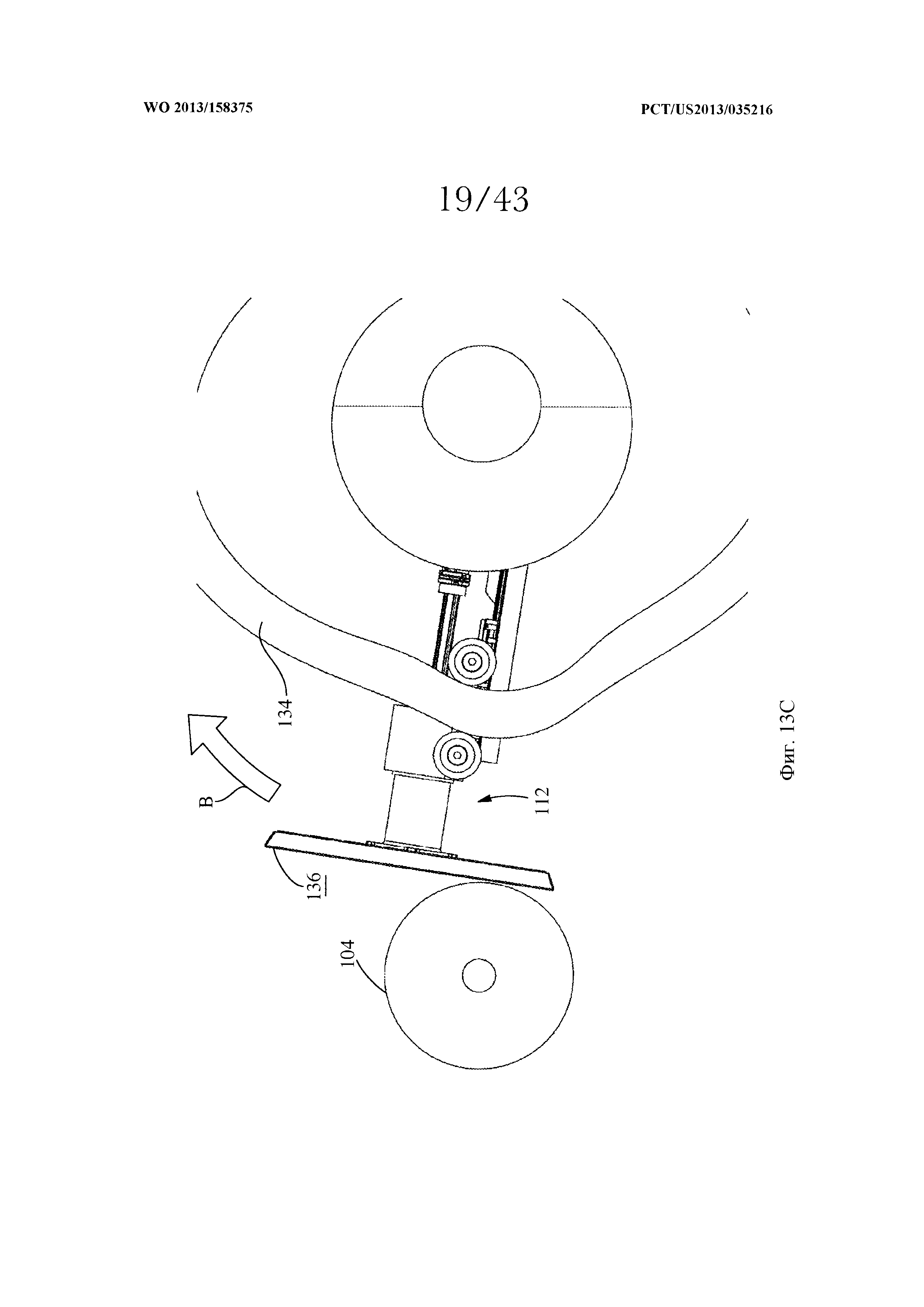
Фиг. 13А-13С. Виды сзади части системы перемещения, содержащей элемент перемещения и поверхность перемещения. Показаны последовательные этапы движения поверхности перемещения относительно первого движущегося несущего элемента, в соответствии с различными не ограничивающими воплощениями изобретения.
Фиг. 14. Вид спереди двух дорожек, узла вращения и элемента перемещения, когда части элемента перемещения переходят из первого положения во второе положение в соответствии с одним не ограничивающим воплощением настоящего изобретения.
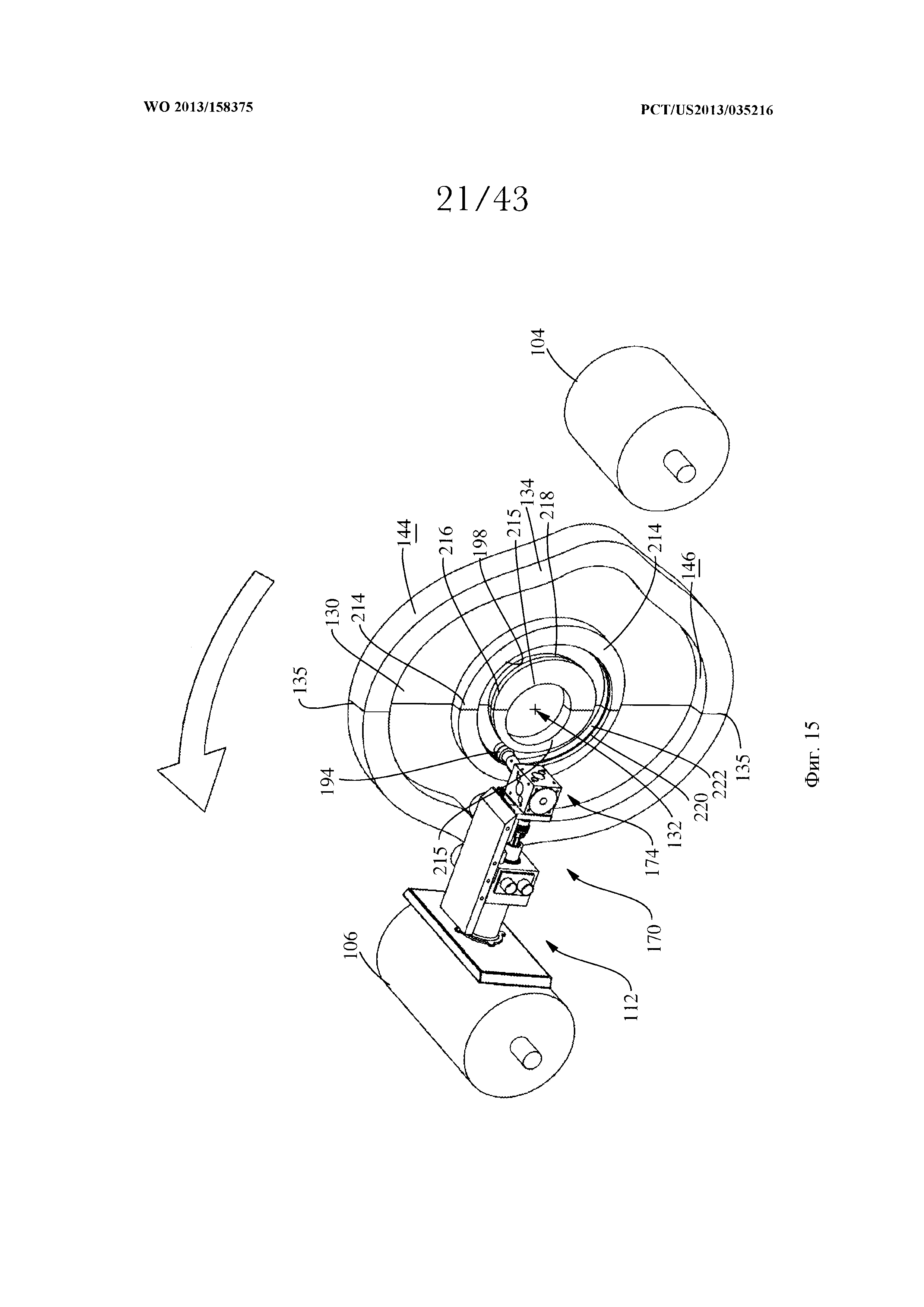
Фиг. 15. Аксонометрический вид спереди двух дорожек, узла вращения и элемента перемещения, когда часть элемента перемещения находится в зоне сброса во втором положении в соответствии с одним не ограничивающим воплощением настоящего изобретения.
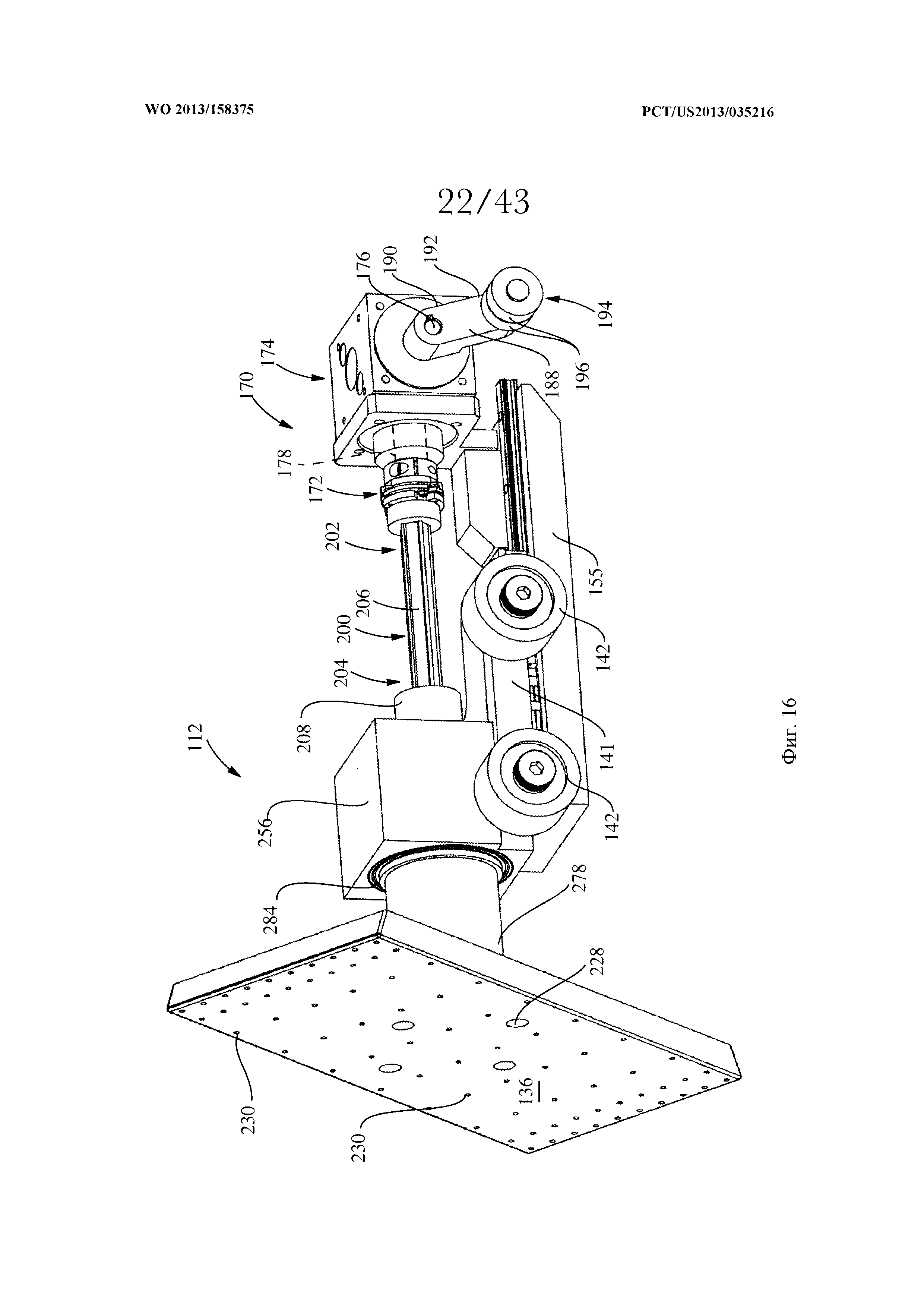
Фиг. 16-18. Аксонометрические виды элемента перемещения, сцепленного с узлом вращения, в соответствии с различными не ограничивающими воплощениями изобретения.
Фиг. 19. Аксонометрический вид с разрезом узла вращения и элемента перемещения. Показаны первое и второе зубчатые колеса в соответствии с одним не ограничивающим воплощением настоящего изобретения.
Фиг. 20. Вид сбоку с разрезом узла вращения и элемента перемещения. Показаны первое и второе зубчатые колеса в соответствии с одним не ограничивающим воплощением настоящего изобретения.
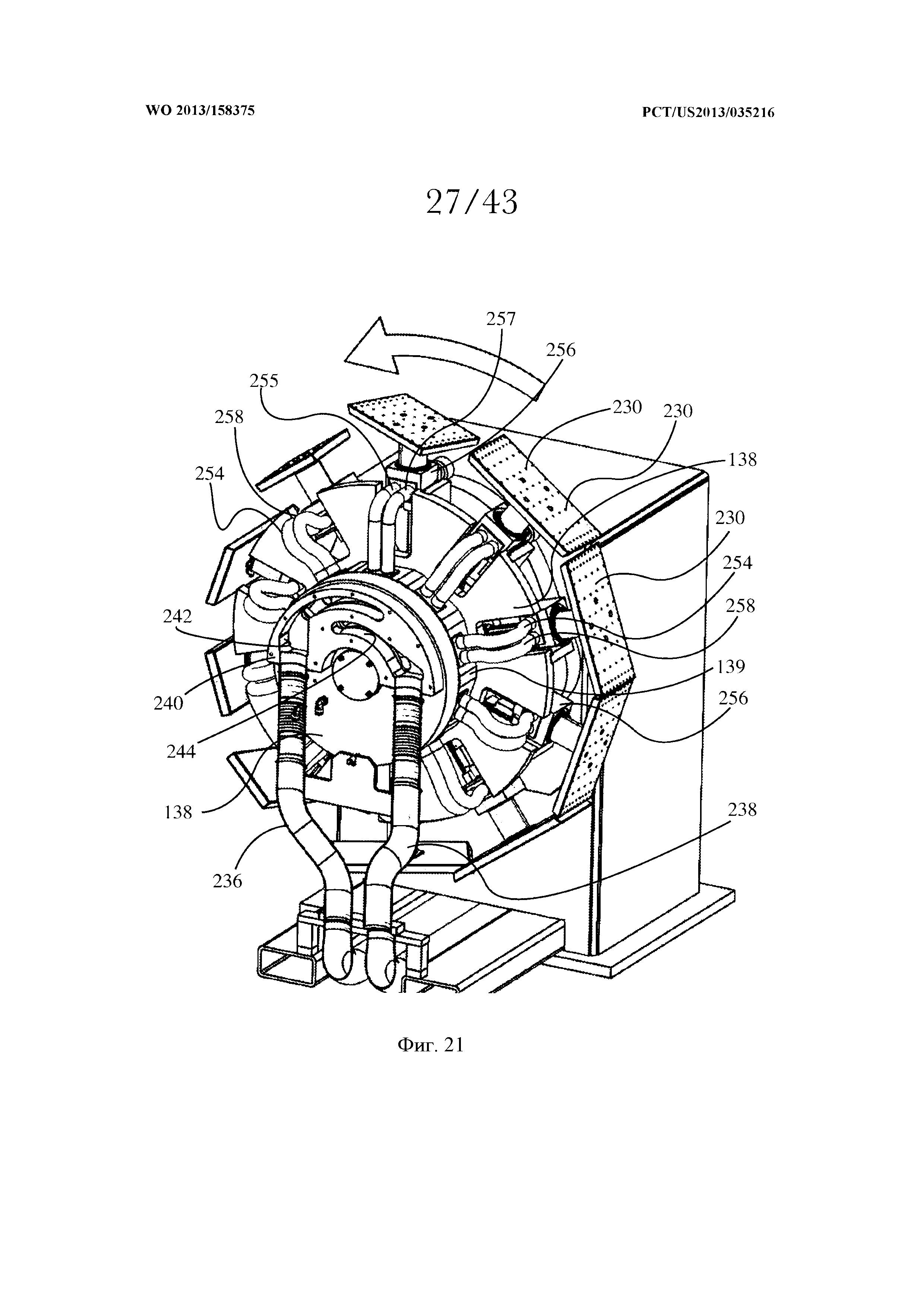
Фиг. 21. Аксонометрический вид системы перемещения с отрезанной частью приемного коллектора газообразной среды, в соответствии с одним не ограничивающим воплощением настоящего изобретения.
Фиг. 22. Аксонометрический вид системы перемещения с отрезанной частью приемного коллектора газообразной среды и отрезанной частью диска распределения газообразной среды, в соответствии с одним не ограничивающим воплощением настоящего изобретения.
Фиг. 23. Аксонометрический вид системы перемещения с отрезанной частью приемного коллектора газообразной среды в соответствии с одним не ограничивающим воплощением настоящего изобретения.
Фиг. 24-26. Аксонометрические виды части системы с использованием газообразной среды элемента перемещения в соответствии в соответствии с различными не ограничивающими воплощениями изобретения.
Фиг. 27-29. Аксонометрические виды снизу с разрезом части системы с использованием газообразной среды элемента перемещения в соответствии в соответствии с различными не ограничивающими воплощениями изобретения.
Фиг. 30. Аксонометрический вид с разрезом части системы с использованием газообразной среды элемента перемещения в соответствии с настоящим изобретением, с частями элемента перемещения, находящимися в первом положении, в соответствии с одним не ограничивающим воплощением настоящего изобретения.
Фиг. 31. Аксонометрический вид с разрезом части системы с использованием газообразной среды элемента перемещения в соответствии с настоящим изобретением, с частями элемента перемещения, находящимися во втором положении, в соответствии с одним не ограничивающим воплощением настоящего изобретения.
Фиг. 32. Еще один аксонометрический вид с разрезом части системы с использованием газообразной среды элемента перемещения в соответствии с настоящим изобретением, с частями элемента перемещения, находящимися во втором положении, в соответствии с одним не ограничивающим воплощением настоящего изобретения.
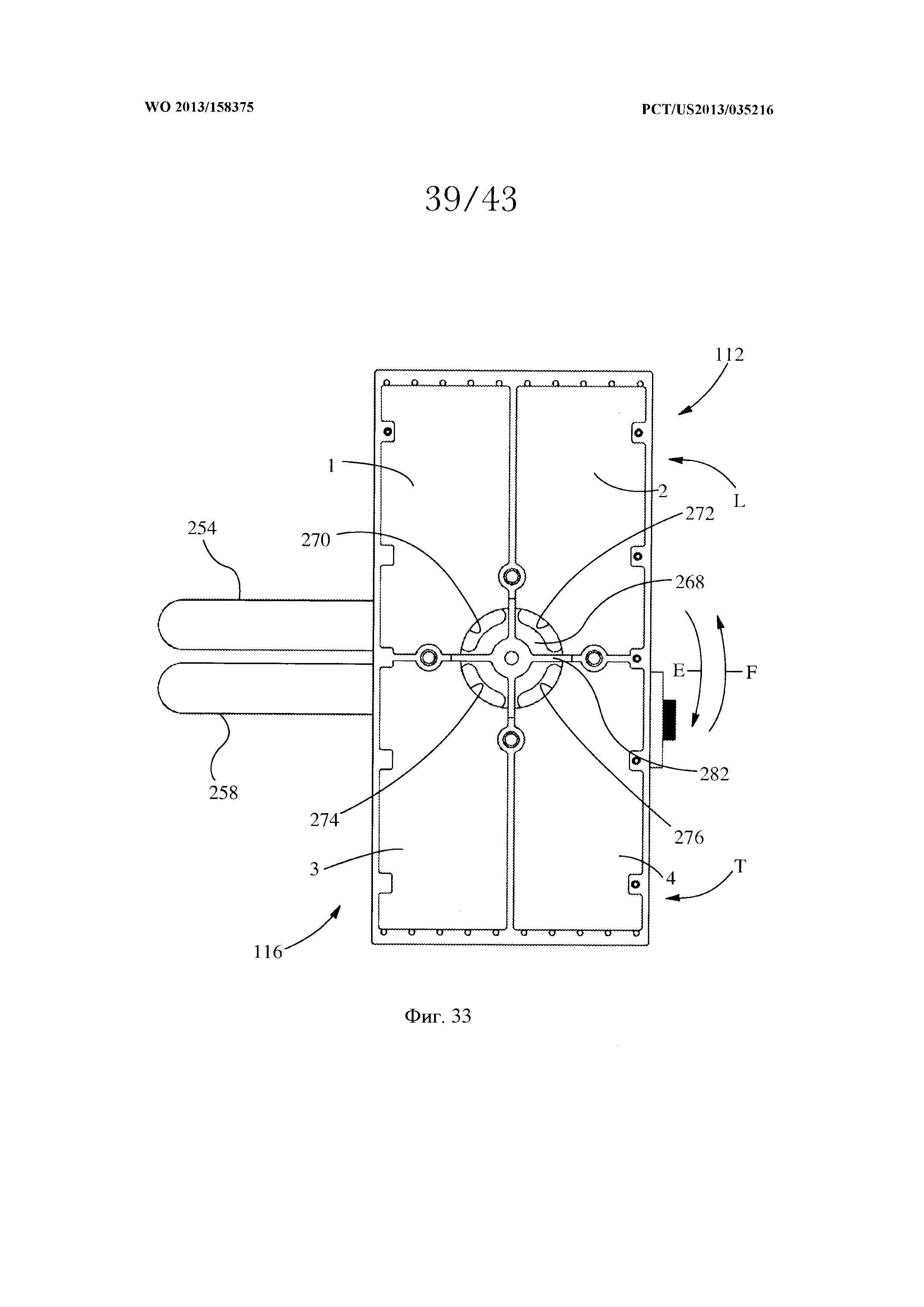
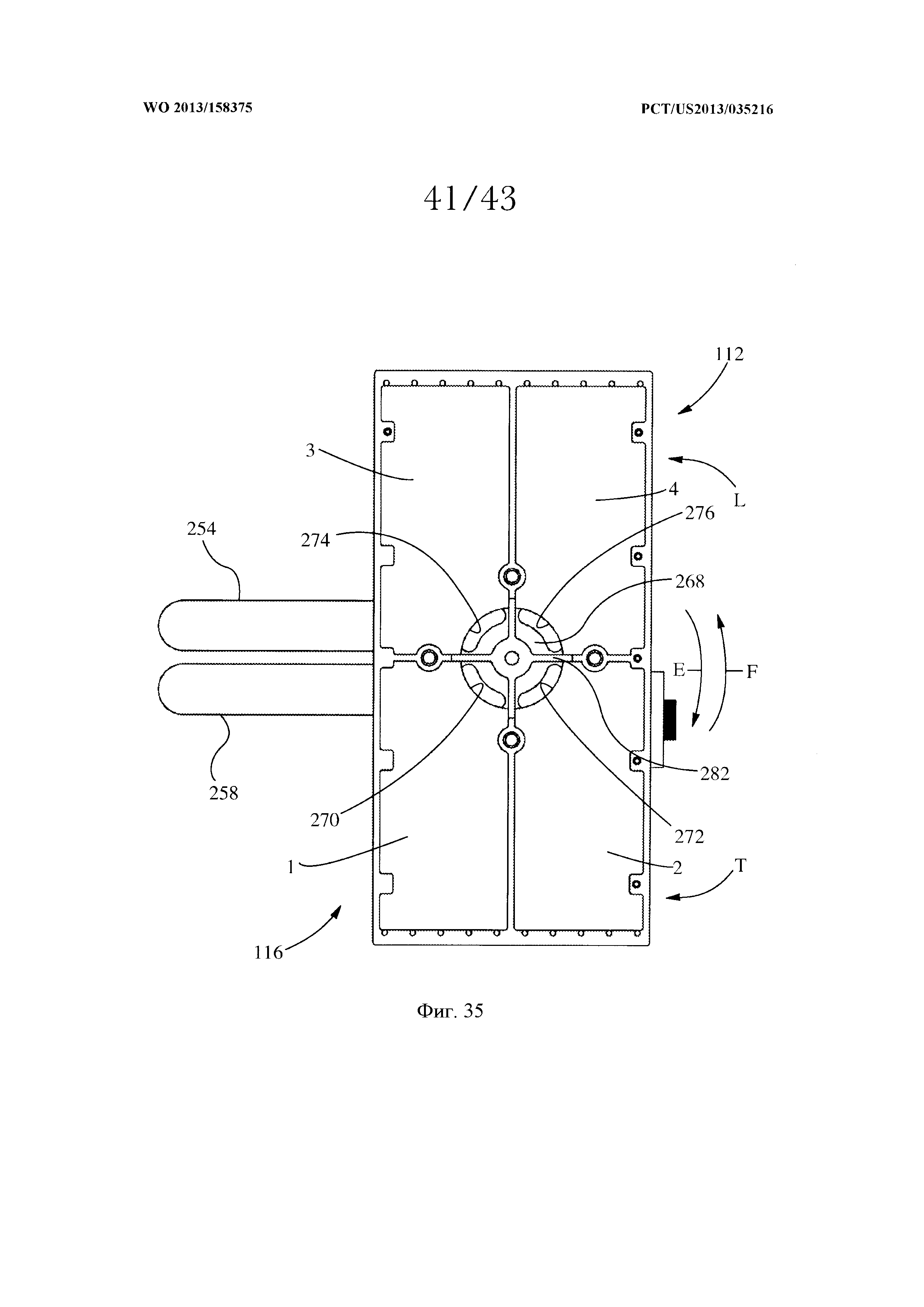
Фиг. 33-36. Виды сверху зон части элемента перемещения, с частью элемента перемещения, находящейся в первом положении, в соответствии с одним не ограничивающим воплощением настоящего изобретения.
Фиг. 37. Вид сверху зон части элемента перемещения, изображенного на фиг. 36, с частью элемента перемещения, находящейся во втором положении, в соответствии с одним не ограничивающим воплощением настоящего изобретения.
Подробное описание изобретения
Ниже приводится подробное описание не ограничивающих воплощений настоящего изобретения, позволяющее понять принципы конструкции, функционирования, изготовления и применения систем с использованием газообразной среды и способов перемещения дискретных изделий в соответствии с настоящим изобретением. Примеры таких не ограничивающих воплощений изображены на прилагаемых чертежах. Сведущим в данной области техники будет понятно, что системы с использованием газообразной среды и способы перемещения дискретных изделий, описанные в настоящей заявке и изображенные на прилагаемых чертежах, являются примерами не ограничивающих воплощений, и что масштаб различных не ограничивающих воплощений настоящего изобретения определяется только его формулой. Отличительные особенности, изображенные или описанные на примере одного не ограничивающего воплощения, могут использоваться в сочетании с отличительными особенностями, описанными на примере других не ограничивающих воплощений. Подразумевается, что такие модификации и изменения должны быть включены в масштаб настоящего изобретения.
Термин «абсорбирующие изделия» в контексте настоящего описания означает товары потребления, основной функцией которых является поглощение и удержание выделений организма. Абсорбирующие изделия в контексте настоящего описания могут означать подгузники-трусы, подгузники с ленточным креплением, и/или гигиенические прокладки (например, изделия женской гигиены). В некоторых случаях абсорбирующие изделия могут содержать подгузники-трусы, подгузники с ленточным креплением, и/или гигиенические прокладки, или могут быть в них преобразованы. Термины «подгузник» и «подгузник-трусы» в контексте настоящего описания означают абсорбирующие изделия, носимые в основном младенцами, детьми и взрослыми, страдающими недержанием мочи, вокруг нижней части корпуса. Термин «одноразовый» в контексте настоящего описания используется для описания абсорбирующих изделий, в целом не предназначенных для стирки или иного восстановления и использования в качестве абсорбирующего изделия (то есть, предполагается, что они должны быть выброшены после первичного их использования, и могут быть также переработаны, компостированы или иным образом удалены, как отходы, без причинения ущерба окружающей среде).
Термины «нетканое полотно» и «нетканый материал» в контексте настоящего описания означают материал, изготовленный из непрерывных (длинных) нитей (волокон), и/или прерывистых (коротких) нитей (волокон) с использованием таких процессов, как спанбонд, выдувание из расплава, кардование и им подобные. Нетканые полотна не имеют структуры тканых или вязаных материалов.
Термин «направление движения в машине (MD)» в контексте настоящего описания означает основное направление движения материала, полотна или изделия в технологическом процессе. В некоторых производственных и технологических процессах возможны более, чем одно направление движения в машине, когда, например, изделие одновременно подвергается нескольким операциям обработки. Примером такого процесса является сложение изделия пополам. Иными словами, технологическая линия может иметь общее направление движения в машине, но материал или изделие при их прохождении через различные операции на технологической линии могут двигаться в направлениях, отличных от общего направления движения в машине. Так, например, дискретное изделие, имеющее головную часть и хвостовую часть, прикрепленные к поверхностям различных валиков и/или транспортеров, могут одновременно двигаться в двух различных направлениях. В данном примере оба направления движения могут рассматриваться, как направления движения в машине.
Термин «направление, поперечное движению в машине (CD)» в контексте настоящего описания означает направление, в целом перпендикулярное направлению движения в машине.
Термин «подгузник с ленточным креплением» означает одноразовые абсорбирующие изделия, имеющие переднюю поясную область и заднюю поясную область, не скрепленные друг с другом, не скрепленные предварительно, или не связанные друг с другом каким-либо иным образом в состоянии, в котором они находятся в упаковке, то есть до надевания их на носящего. Подгузник с ленточным креплением может быть сложен по своей центральной латеральной оси, так что внутренняя сторона одной его поясной области будет находиться в плотном контакте с внутренней стороной противоположной поясной области, но при этом данные области не скреплены друг с другом. Примеры подгузников с ленточным креплением в различных конфигурациях описаны в патентах США 5,167,897, 5,360,420, 5,599,335, 5,643,588, 5,674,216, 5,702,551, 5,968,025, 6,107,537, 6,118,041, 6,153,209, 6,410,129, 6,426,444, 6,586,652, 6,627,787, 6,617,016, 6,825,393 и 6,861,571.
Термин «подгузники-трусы» в контексте настоящего описания означает одноразовые абсорбирующие изделия, имеющие проем для талии с непрерывным периметром и проемы для ног с непрерывным периметром, и предназначенные для младенцев, детей или взрослых. Подгузники-трусы могут иметь не имеющий разрывов (закрытый) проем для талии и по меньшей мере один не имеющий разрывов (закрытый) проем для ног до надевания изделия на пользователя. Подгузники-трусы при их изготовлении могут быть сформированы различными способами, включая, но не ограничиваясь ими, соединение друг с другом частей абсорбирующего изделия с помощью любых подходящих элементов постоянного скрепления и/или допускающих многократное открытие и закрытие, например, с помощью швов, термошвов, сваркой под давлением, адгезивного скрепления, когезивного скрепления, механических элементов крепления и так далее. Части периметра проема для талии подгузника-трусов могут быть скреплены друг с другом в любом месте поясной области (например, сбоку, спереди или сзади). Подгузник-трусы может допускать раскрытие и последующее повторное скрепление по одной или обеим боковым сторонам. Примеры подгузников-трусов различных конфигураций описаны в патентах США 5,246,433, 5,569,234, 6,120,487, 6,120,489, 4,940,464, 5,092,861, 5,897,545, 5,957,908, а также в патентной публикации США 2003/0233082.
Термин «дискретные изделия» в соответствии с настоящим изобретением означает абсорбирующие изделия, подгузники-трусы, подгузники с ленточным креплением, гигиенические прокладки, бинты, тампоны медицинского назначения, перевязочные материалы и прочие изделия, используемые в любой области, перемещение которых может производиться с помощью устройств перемещения в соответствии с настоящим изобретением. Термин «дискретные изделия» в контексте настоящего описания может также означать части абсорбирующих изделий, подгузников-трусов, подгузников с ленточным креплением, гигиенических прокладок, бинтов, тампонов медицинского назначения, перевязочных материалов и прочих изделий. Дискретные изделия могут быть гибкими. В одном из воплощений «дискретные изделия» могут означать базовые части подгузников с ленточным креплением или подгузников-трусов. Базовая часть может содержать верхний лист, тыльный лист и абсорбирующую сердцевину, расположенную между по меньшей мере частью верхнего листа и тыльного листа. Базовая часть может также содержать натянутые эластичные элементы, например, резинки для ног и резинки внутренних барьерных ножных манжет.
Как показано на фиг. 1, в ряде воплощений изобретения предлагаются системы 100 перемещения и используемые в них элементы перемещения, предназначенные для переноса дискретных изделий и/или гибких дискретных изделий, таких, как, например, базовая часть подгузника-трусов или подгузника с ленточным креплением. В настоящем изобретении предлагается также способ перемещения дискретных изделий. Базовая часть подгузника-трусов или подгузника с ленточным креплением может двигаться с первой скоростью на первом движущемся несущем элементе и с помощью элементов перемещения, или их частей, системы перемещения может переноситься на второй движущийся несущий элемент, движущийся со второй скоростью или с той же самой скоростью. Дискретные изделия могут, например, переноситься на второй движущийся несущий элемент с изменением скорости их движения, и/или шага, с которым они расположены, и/или с поворотом изделия. В других воплощениях на втором движущемся несущем элементе могут перемещаться дополнительные компоненты изделия, например, полотна переднего и заднего поясков, или дискретные передние и задние пояски, из которых в совокупности формируется часть пояса в подгузнике-трусах. Второй движущийся несущий элемент может содержать первую часть, несущую полотно передних поясков, и вторую часть, несущую полотно задних поясков. В других воплощениях второй движущийся несущий элемент может содержать два отдельных несущих элемента, один из которых несет полотно передних поясков, а второй несет полотно задних поясков. Если на втором движущемся несущем элементе подаются полотна переднего и заднего поясков, то базовая часть может переноситься с первого движущегося несущего элемента на второй движущийся несущий элемент и при этом поворачиваться таким образом, чтобы поясные области базовой части накладывались соответственно на первое и второе полотна соответственно первого и второго поясков. Первая поясная область базовой части может накладываться на полотно первых поясков, а вторая поясная область базовой части может накладываться на полотно вторых поясков, в результате чего формируется практически готовое абсорбирующее изделие, которое затем может быть преобразовано, например, в подгузник-трусы или в подгузник с ленточным креплением. Поясные области базовой части могут быть приклеены или иным образом прикреплены к полотнам поясков. Более подробное описание такого примера переноса дискретного изделия будет приведено ниже.
Системы перемещения и части элементов перемещения в соответствии с настоящим изобретением могут иметь конструкцию, обеспечивающую возможность поворота дискретных изделий при их переносе с первого движущегося несущего элемента на второй движущийся несущий элемент, для их укладки на одно или более полотен компонентов или на один или более дискретных компонентов, движущихся на втором движущемся несущем элементе, или просто на второй движущийся несущий элемент, без укладки на дискретные компоненты. Так, например, в одном из воплощений часть элемента перемещения системы перемещения может принимать дискретное изделие, например, базовую часть подгузника с ленточным креплением или подгузника-трусов, с первого движущегося несущего элемента, и поворачивать его между первым положением и вторым положением (например, поворачивать дискретное изделие на 90°) и укладывать дискретное изделие на полотна переднего и заднего поясков, движущиеся на втором движущемся несущем элементе, в результате чего формируется практически готовое абсорбирующее изделие, которое затем может быть преобразовано, например, в подгузник-трусы или в подгузник с ленточным креплением. Системы перемещения и элементы перемещения, или их части, могут также иметь конфигурацию, которая обеспечивает изменение шага между дискретными изделиями, от величины шага на первом движущемся несущем элементе и до величины шага на втором движущемся несущем элементе. При этом под изменением шага между дискретными изделиями подразумевается изменение расстояния между центрами соседних дискретных изделий. В одном из воплощений шаг между дискретными изделиями после их переноса на второй движущийся несущий элемент может становиться больше или меньше шага между дискретными изделиями на первом движущемся несущем элементе. В других воплощениях шаг между дискретными изделиями может не меняться после их переноса с первого движущегося несущего элемента на второй движущийся несущий элемент. В некоторых воплощениях системы перемещения и части элементов перемещения могут не поворачивать дискретные изделия при их переносе с первого движущегося несущего элемента на второй движущийся несущий элемент, хотя конструкция системы может позволять совершение такого поворота. В других воплощениях системы перемещения и/или элементы перемещения, или их части могут не иметь функции поворота дискретных изделий при их переносе с первого движущегося несущего элемента на второй движущийся несущий элемент.
При этом подразумеваются, что способы и устройства в соответствии с настоящим изобретением могут также подходить для других приложений, в которых требуется перенос дискретного изделия или дискретного компонента с первого движущегося несущего элемента на второй движущийся несущий элемент, независимо от скорости первого и второго движущихся несущих элементов, и независимо от того, требуется ли поворот или изменение шага дискретных изделий или дискретных компонентов. Такие приложения могут быть связаны с различными технологическими процессами изготовления промежуточных или конечных продуктов в любой отрасли промышленности.
На фиг. 2 показано воплощение подгузника-трусов 20, который может быть по меньшей мере частично сформирован или изготовлен с использованием систем перемещения или элементов перемещения в соответствии с настоящим изобретением. На фиг. 3 показано абсорбирующее изделие 10, из которого может быть сформирован подгузник-трусы 20, изображенный на фиг. 2. Сведущим в данной области техники будет понятно, что на фиг. 2 и 3 показан лишь один пример изделия, которое может быть сформировано, или по меньшей мере частично изготовлено с использованием систем перемещения или элементов перемещения в соответствии с настоящим изобретением. С помощью систем перемещения или элементов перемещения в соответствии с настоящим изобретением может быть сформировано, или по меньшей мере частично изготовлено множество других изделий, включая прочие абсорбирующие изделия, подгузники или их части. Абсорбирующее изделие 10 имеет центральную продольную ось L1 и центральную латеральную ось L2 (смотри фиг. 3). Подгузник-трусы 20 имеет наружную поверхность 22, внутреннюю поверхность 24, расположенную напротив наружной поверхности 22, переднюю поясную область 26, заднюю поясную область 28, промежностную 30 и элементы 32 скрепления, скрепляющие друг с другом переднюю поясную область 26 и заднюю поясную область 28, в результате чего образуются два проема 34 для ног и проем 36 для талии. Элементы 32 скрепления могут обеспечивать неразъемное скрепление или возможность их раскрытия и повторного скрепления. Упоминание термина «подгузник-трусы 20» в контексте настоящего описания подразумевает, что абсорбирующее изделие 10, хотя из него еще не сформирован подгузник-трусы 20, также может считаться «подгузником-трусами». При этом подразумевается, что хотя описание построено на примере подгузника-трусов 20, на самом деле из абсорбирующего изделия 10 может быть также сформирован подгузник с ленточным креплением путем добавления элементов крепления и/или зон крепления к переднему пояску 84, заднему пояску 86 или обоим из них.
В одном из воплощений (фиг. 2 и 3), подгузник-трусы 20 может содержать абсорбирующую базовую часть, закрывающую промежностную область носящего и пояс 40, протяженный в поперечном направлении вокруг проема 36 для талии. Подгузник-трусы 20 может также дополнительно содержать наружный покровный слой 42, закрывающий базовую часть 38. Пояс 40 может образовывать проем 36 для талии подгузника-трусов 20. Пояс 40, базовая часть 38 и наружный покровный слой 42 могут совместно образовывать проемы 34 для ног. В одном из воплощений подгузник-трусы 20 может иметь нашивку или наклейку 44 с напечатанной на ней графикой 46, которая может быть расположена в передней поясной области 26, задней поясной области 28 или в любой другой подходящей части подгузника-трусов 20. Пояс 40 может быть сформирован из переднего пояска 84 в передней поясной области 26 и заднего пояска 86 в задней поясной области 28. Передний поясок 84 может образовывать передний поясной край 35 в передней поясной области 26, а задний поясок 86 может образовывать задний поясной край 37 в задней поясной области 28. Передний поясной край 35 и задний поясной край 37 могут быть расположены друг напротив друга относительно центральной латеральной оси L2. Поясок 40 может образовывать часть наружной поверхности 22 или внутренней поверхности 24 подгузника-трусов 20. В других воплощениях пояс 40 или его части могут быть расположены между слоями базовой части 38, например, между верхним листом и тыльным листом.
Абсорбирующая базовая часть 38 может поглощать и удерживать попадающие на нее выделения организма. Как показано на фиг. 3, базовая часть 38 может иметь в целом прямоугольную форму с левым и правым протяженными в продольном направлении боковыми краями 48 (далее именуемыми «продольными боковыми краями»), а также передним и задним протяженными в латеральном направлении торцевыми краями 50 (далее именуемыми «латеральными торцевыми краями. Базовая часть может также содержать поясные панели (переднюю поясную панель 52, расположенную в передней поясной области 26 и заднюю поясную панель, расположенную в задней поясной области 28), а также промежностную панель 56, расположенную в промежностной области 30 между передней и задней поясными панелями 52, 54.
Как показано на фиг. 3, в одном из воплощений подгузник-трусы 20 может содержать передний и задний пояски 84 и 86, которые должны окружать по меньшей мере часть талии носящего. Будучи соединены друг с другом, передний и задний пояски 84 и 86 в совокупности образуют по меньшей мере часть пояса 40 или весь пояс 40. Передний и задний пояски 84 и 86 могут быть связаны друг с другом базовой частью 38, образующей промежностную область 30 подгузника-трусов 20. Передний и задний пояски 84 и 86 могут быть сформированы соответственно из первого поясного слоя 82, который может образовывать часть наружной поверхности 22 подгузника-трусов 20 и второго поясного слоя 83, который может образовывать часть внутренней поверхности 24 подгузника-трусов 20. Первый и второй поясные слои 82 и 83 могут содержать любые известные материалы. Примерами подходящих материалов являются пленки, пластические пленки, перфорированные пластические пленки, тканые или нетканые полотна из натуральных материалов (например, из древесных или хлопковых волокон), синтетических волокон (например, полиолефиновых, полиамидных, полиэфирных, полиэтиленовых или полипропиленовых волокон) или из сочетаний натуральных и/или синтетических волокон, растягивающиеся нетканые полотна и нетканые полотна с покрытиями. Пояс 40 может содержать внутренний гидрофобный нетканый материал и наружный нетканых гидрофобный материал. Передний и задний пояски 84 и 86 могут также содержать множество эластичных элементов 85, расположенных по меньшей мере частично между первым и вторым поясными слоями 82 и 83 и могут быть прикреплены по меньшей мере к одному из поясных слоев 82 и 83 с использованием адгезивов или других способов скрепления. Эластичные элементы 85 могут содержать одну или более эластичных нитей, прочие эластичные материалы, эластомерные пленки, эластомерные ленты, эластомерные нетканые материалы, эластомерные нити, эластомерные адгезивы, эластомерные пены, сетки или их сочетания.
Базовая часть 38 подгузника-трусов 20 может содержать часть наружной поверхности 22, тыльный лист 60, часть внутренней поверхности 24, верхний лист 58 и абсорбирующую сердцевину 62, расположенную между по меньшей мере частью верхнего листа 58 и по меньшей мере частью тыльного листа 60. Кроме того, базовая часть 38 может содержать эластифицированные барьерные ножные манжеты 64, расположенные на боковых краях 48 базовой части 38 или в непосредственной близости к ним. Барьерные ножные манжеты 64 могут обеспечивать более высокую емкость удержания жидких и иных выделений организма в промежностной области 30 и могут содержать единый слой материала, который может быть сложен сам с собой, в результате чего будет сформирована барьерная ножная манжета, имеющая два слоя. Барьерные ножные манжеты 64 могут быть протяженными от боковой стороны базовой части 38, или от места, расположенного в непосредственной близости к продольному боковому краю 48, в сторону центральной продольной оси L1. Барьерные ножные манжеты 64 могут быть сложены по линиям 66 сложения обратно к продольным боковым краям 48. Передний и задний пояски 84 и 86 могут закрывать по меньшей мере часть базовой части 38, и один из них, или оба они могут быть расположены на наружной поверхности 22 базовой части 38, на внутренней поверхности 24 базовой части 38, или могут быть расположены между различными частями базовой части 38.
В одном из воплощений часть базовой части 38, или вся базовая часть 38 может быть растяжима в степени, большей, чем характерная растяжимость материала или материалов, из которых изготовлена 38, например, материала тыльного листа 60. Дополнительная растяжимость может быть целесообразна для того, чтобы базовая часть 38 могла лучше прилегать к контурам тела носящего во время его движений, и/или для обеспечения покрытия достаточной площади поверхности тела носящего. Дополнительная растяжимость может быть также желательна, например, чтобы базовая часть 38 подгузника-трусов одного и того же размера (до ее растяжения) могла быть растянута в передней поясной области 26, задней поясной области 28 или в обеих данных областях, и изделие можно было надеть с обеспечением хорошего покрытия поверхности тела на пользователей с различными размерами тела, то есть, чтобы подогнать подгузник-трусы под индивидуального пользователя. После растяжения одной или обеих поясных областей базовая часть 38 принимает форму песочных часов (когда промежностная область 30 растянута в относительно меньшей степени, чем одна или обе поясные области), в результате чего подгузник-трусы 20 при его надевании и последующем ношении принимает форму хорошо подогнанного предмета одежды. Кроме того, дополнительная растяжимость может быть желательна в целях снижения себестоимости подгузника-трусов 20. А именно, небольшое количество нерастяжимого материала достаточно для изготовления только лишь малой части изделия, в то время как то же количество растяжимого материала может быть использовано для изготовления большей части изделия, и при этом будет обеспечиваться хорошая посадка и покрытие достаточной площади поверхности тела носящего.
Часть базовой части 38, например, часть базовой части 38 в одной или обеих из поясных областей 26 и 28, может быть растяжимой в латеральном направлении в большей степени, чем остальная часть базовой части 38, например, ее промежностная область 30, в результате чего при максимальном растяжении всех ее частей базовая часть 38 принимает форму песочных часов. В одном из воплощений часть базовой части 38 расположена непосредственно под, над и/или в непосредственной близости к переднему растяжимому пояску 84, заднему растяжимому пояску 86 или к обоим из них, и может иметь максимальную степень растяжения в латеральном направлении, большую, чем максимальная степень растяжения другой части базовой части 38, например, промежностной области 30, в результате чего максимальное растяжение всех частей базовой части облегчает надевание подгузника-трусов 20 на тело носящего, так, чтобы поясные области 26 и 28 могли быть удобно расположены поверх бедер носящего, и кроме того, чтобы проемы для ног могли быть хорошо раскрыты и должным образом ориентированы, чтобы через них было удобно пропустить ноги носящего.
В одном из воплощений проницаемый для жидкостей верхний лист 58 может быть расположен в непосредственной близости к обращенной к телу поверхности абсорбирующей сердцевины 62, и может быть прикреплен к ней и/или к тыльному листу способами крепления, хорошо известными сведущим в данной области техники. Непроницаемый для жидкостей тыльный лист 60 может в целом представлять собой часть подгузника-трусов 20, расположенную в непосредственной близости к обращенной к одежде поверхности абсорбирующей сердцевины 62, и может предотвращать, или по меньшей мере препятствовать загрязнению выделениями организма, поглощенными и удерживаемыми абсорбирующей сердцевиной 62, предметов одежды, которые могут находиться в контакте с наружной поверхностью 22 подгузника-трусов 20.
Верхний лист 58, тыльный лист 60 и абсорбирующая сердцевина 62 могут быть изготовлены из любых известных материалов. Подходящие материалы верхнего листа могут содержать пористые пены, сетчатые пены, перфорированные пластические пленки, или тканые и нетканые полотна из натуральных волокон (например, древесных или хлопковых волокон), синтетических волокон (например, полиэфирных или полипропиленовых волокон) или сочетаний натуральных и синтетических волокон. Подходящие материалы для изготовления тыльного листа могут включать дышащие материалы, позволяющие парам проходить через подгузник-трусы 20, но предотвращающие, или по меньшей мере препятствующие прохождению через тыльный лист 60 выделений организма. Такие материалы могут включать нетканые материалы, тканые материалы, пленки и/или ламинаты, содержащие сочетания из одного или более из данных материалов. В одном из воплощений тыльный лист 60 может быть ламинатом из пленки и нетканого материала, при этом нетканый материал в таком ламинате образует наружный покровный слой 42.
Подходящая абсорбирующая сердцевина 62 для использования в составе подгузника-трусов 20 может содержать любой абсорбирующий материал, который является в целом сжимаемым, способным прилегать к контурам тела, не раздражающим кожи носящего, и способным поглощать и удерживать жидкости, такие, как моча, и прочие типы выделений организма. Конфигурации и конструкции абсорбирующей сердцевины 62 могут быть различными, например, одна или более абсорбирующих сердцевин и/или прочих абсорбирующих структур в составе абсорбирующего изделия могут иметь зоны различной толщины, один или более градиентов гидрофильности и емкости поглощения, и/или зоны поглощения с уменьшенной объемной и поверхностной плотностью, и/или могут содержать один или более слоев или одну или более структур. В некоторых воплощениях абсорбирующая сердцевина 62 может содержать компонент для приема текучих сред, компонент для распределения текучих сред и/или компонент для хранения текучих сред. Подходящий компонент для хранения текучих сред описан в патенте США 6,590,136.
В одном из воплощений наружный покровный слой 42 может быть расположен на наружной поверхности 22 подгузника-трусов 20 и может покрывать промежностную панель 56 базовой части 38. Наружный покровный слой 42 может быть протяженным поверх передней поясной панели 52 и задней поясной панели 54 базовой части 38. Наружный покровный слой 42 может образовывать часть тыльного листа 60 и/или базовой части 38. В одном из воплощений наружный покровный слой 42 может быть непосредственно прикреплен, покрывая его частично или полностью, к непроницаемому для жидкости тыльному листу 60 базовой части 38. В различных воплощениях наружный покровный слой 42 может быть расположен между передним и задним поясками 84 и 86.
Наружный покровный слой 42 может содержать материал, отдельный от первого и второго поясных слоев 82 и 83, из которых сформированы пояски 84 и 86. Наружный покровный слой 42 может содержать два или более слоев любых известных материалов, включая материалы, используемые в первом и втором поясных слоях 82 и 83. В одном из воплощений наружный покровный слой 42 может содержать единственный слой нетканого полотна из синтетических волокон. В различных воплощениях наружный покровный слой 42 может содержать единственный слой из гидрофобного, не растягивающегося материала. В одном из воплощений наружный покровный слой 42 может содержать пленку, пену, нетканый материал, тканый материал, им подобные материалы и/или их сочетания, например, ламинат из пленки и нетканого материала.
В одном из воплощений пояс 40 может быть по меньшей мере частично сформирован, или даже полностью сформирован за счет скрепления переднего и заднего поясков 84 и 86 друг с другом неразъемно или с возможностью многократного скрепления, в результате чего образуются места 32 скрепления. Могут использоваться любые подходящие способы скрепления, известные сведущим в данной области техники. Пояс 40 может быть кольцевым и эластичным. Кольцевой эластичный пояс 40 может быть протяженным вокруг проема 36 для талии подгузника-трусов 20, динамически вырабатывая силы, обеспечивающие правильную посадку подгузника на носящего и динамически распределяя данные силы во время его ношения.
На фиг. 1 и 4-6, показана система 100 перемещения для переноса дискретных изделий с движущегося несущего элемента или на движущийся несущий элемент. На фиг. 1 показан аксонометрический вид спереди системы 100 перемещения. На фиг. 4 показан вид спереди системы 100 перемещения. На фиг. 5 показан вид сверху системы 100 перемещения. На фиг. 6 показан аксонометрический вид сзади системы 100 перемещения. Система 100 перемещения может обеспечивать перенос дискретных изделий 102 с первого движущегося несущего элемента 104 на второй движущийся несущий элемент 106. Движущиеся несущие элементы 104 и 106, с которого и на который соответственно переносятся дискретные изделия 102, могут быть, например, валиками, барабанами, криволинейными транспортерами, линейными транспортерами, и/или дискретными головками, движущимися по криволинейному пути. Первый и второй движущиеся несущие элементы 104 и 106 могут иметь различные скорости их поверхностей или одинаковые скорости их поверхностей. Система 100 перемещения может подхватывать дискретные изделия 102, движущиеся с первой скоростью V1, с первого движущегося несущего элемента 104, и может укладывать дискретные изделия 102 со второй скоростью V2 на второй движущийся несущий элемент 106. Первая скорость V1 и вторая скорость V2 в точке или зоне переноса дискретных изделий с первого движущегося несущего элемента 104 и на второй движущийся несущий элемент 106 могут быть линейными скоростями или тангенциальными составляющими скорости.
В одном из воплощений сплошное полотно 108 дискретных изделий может подаваться на валик или другой транспортирующий механизм, и далее на первый движущийся несущий элемент 104. Как только часть полотна 108 дискретных изделий, достаточно большая для формирования из нее дискретного изделия 102, находится в зацеплении с первым движущимся несущим элементом 104, и/или находится в зацеплении с частью элемента 112 перемещения системы 100 перемещения, нож, выполненный за единое целое с первым движущимся несущим элементом 104, может нарезать полотно 108 на дискретные изделия 102, используя в качестве опоры опорный валик 114. Нож может быть проволочным ножом, просечкой или любым другим подходящим ножом или режущим устройством или механизмом. Такие системы из ножа и опорного валика хорошо известны в данной области техники. В других воплощениях ранее нарезанные дискретные изделия 102 могут подаваться на транспортер, а затем на первый движущийся несущий элемент 104.
Части элементов 112 перемещения в соответствии с настоящим изобретением могут также поворачиваться между первым положением 116 и по меньшей мере вторым положением 118 при переносе дискретных изделий 102 между первым движущимся несущим элементом 104 и вторым движущимся несущим элементом 106. В результате этого дискретные изделия 102 могут поворачиваться из первого положения 116 во второе положение 118. Части элементов 112 перемещения могут поворачиваться с помощью узлов вращения, находящихся в зацеплении с частью каждого из элементов 112 перемещения, как будет более подробно описано ниже. Дискретные изделия 102 могут поворачиваться на угол, составляющий от 30° до 180°, от 40° до 150°, от 60° до 120°, от 75° до 105°, 45°, примерно 90° (например, ±5°), 90° или 180°, или составлять любое число градусов с шагом в один градус в указанных выше диапазонах. В некоторых воплощениях дискретные изделия 102 могут совсем не поворачиваться, и система перемещения может использоваться для транспортировки дискретных изделий 102 и/или изменения шага между ними, не поворачивая их.
Как показано на фиг. 1 и 4-6, непрерывные полотна 120 компонентов могут перемещаться ко второму движущемуся несущему элементу 106, вокруг него и затем от него, с помощью валика, транспортера или иного механизма. В одном из воплощений такими полотнами 120 компонентов могут быть передние пояски 124 и задние пояски 126, хотя в других воплощениях полотна 120 могут быть полотнами других компонентов, или даже могут использоваться дискретные компоненты, ранее нарезанные из сплошного полотна. На полотна 120 компонентов или на дискретные компоненты может наноситься адгезив с помощью дозаторов 128 адгезива. Дозаторы 128 адгезива являются дополнительно возможными в данном изобретении, и упоминаются для иллюстрации одного из примеров систем 100 перемещения в соответствии с настоящим изобретением. Адгезив может наноситься на части полотен 120 компонентов до того, как данные части проходят вокруг второго движущегося несущего элемента 106. В результате этого может производиться адгезивное крепление перемещаемого дискретного изделия 102 к полотнам 120 компонентов при их переносе на второй движущийся несущий элемент 106. В одном из воплощений дискретные изделия 102 могут представлять собой базовую часть 38, и передняя поясная панель 52 базовой части 38 может посредством адгезива крепиться к непрерывному полотну 124 передних поясков, а задняя поясная панель 54 может посредством адгезива крепиться к непрерывному полотну 126 задних поясков. В результате этого может быть получено полотно абсорбирующих изделий 10. Полотно абсорбирующих изделий 10 может быть затем нарезано или иным образом разделено на дискретные абсорбирующие изделия 10, например, на абсорбирующие изделия, изображенные на фиг. 2.
В одном из воплощений, показанном на фиг. 1 и 4-10, система 100 перемещения может содержать раму 130, определяющую ось 132 вращения и дорожку 134 (именуемую также в настоящем описании первой дорожкой или наружной дорожкой), имеющую форму окружности, протяженной вокруг оси 132 вращения. На фиг. 7 показан местный вид сзади с разрезом системы 100 перемещения, а на фиг. 8 показан аксонометрический местный вид сзади с разрезом системы 100 перемещения. На обоих данных чертежах рама 130 и некоторые другие компоненты условно сняты для большей наглядности отличительных особенностей остальных описываемых компонентов. На фиг. 9 показан аксонометрический вид спереди системы 100 перемещения, с которой для большей наглядности чертежа условно снято множество элементов 112 перемещения. На фиг. 10 показан вид сзади некоторых частей системы 100 перемещения, в частности, дорожки 134, элемента 112 перемещения и некоторых других компонентов. Расстояние между осью 132 вращения и различными точками на дорожке 134 может быть различным. Дорожка 134 может быть кулачковой поверхностью. Дорожка 134 может содержать одну или более точек 135 разъединения, на случай, если дорожку 134 приходится разбирать для технического обслуживания или других целей. Система 100 перемещения может содержать один или более элементов 112 перемещения, находящихся в зацеплении с дорожкой 134 с возможностью перемещения, качения и/или сдвига. Каждый из элементов 112 перемещения может содержать поверхность 136 перемещения, расположенную на конце элемента 112 перемещения, самом удаленном от оси 132 вращения. Поверхность 136 перемещения может иметь конфигурацию, обеспечивающую прием одного или более дискретных изделий 102. В различных воплощениях поверхности 136 перемещения могут иметь конструкцию, обеспечивающую удержание на них дискретных изделий 102 с использованием, например, давления газообразной среды, магнитов или адгезива. Система 100 перемещения может также содержать колесо 138 с опорой на раме 130, вращающееся вокруг оси 132 вращения. Периметр колеса 138 может быть круглым или некруглым. Колесо 138 может находиться в зацеплении с частями элементов 112 перемещения таким образом, что при вращении колеса 138 вокруг оси 132 вращения элементы 112 перемещения будут двигаться по замкнутому пути вокруг оси 132 вращения, в соответствии с траекторией дорожки 134. Форма дорожки 134 может вызывать движение элементов 112 перемещения в радиальном направлении, в сторону оси 132 вращения и от нее, и при этом поверхности 136 перемещения будут находиться на постоянном или в сущности постоянном расстоянии, или на минимальном расстоянии от первого движущегося несущего элемента 104 и второго движущегося несущего элемента 106 в точках или зонах перехода дискретного изделия на поверхности 136 перемещения и сброса с них. В различных воплощениях минимальное расстояние может изменяться в пределах от 0 до 6 мм, или может иметь допуск от ±0,1 до ±1 мм, хотя возможно изменение и в значительно более широких пределах. В одном из воплощений минимальное расстояние может быть сначала постоянным, затем не постоянным, затем снова постоянным в точке или зоне переноса дискретного изделия, при прохождении поверхности 136 перемещения мимо точки или зоны переноса дискретного изделия. Такой профиль дорожки может использоваться, если, например, требуется поддерживать в сущности постоянным зазор только лишь на головном и/или хвостовом крае переноса. Профиль дорожки может быть также подобран с учетом неодинаковой толщины перемещаемого дискретного изделия в различных его частях. В одном из воплощений зазор может быть, например, больше в области, на которой расположена абсорбирующая сердцевина.
Как показано на фиг. 1 и 4-10, в одном из воплощений рама 130 может быть установлена на основание или стенд 140 системы 100 перемещения. Дорожка 134 может быть выполнена за единое целое с рамой 130, на раме 130, или может быть установлена на раму 130. Дорожка 134 может представлять собой выступ, протяженный от плоскости рамы 130, или может представлять собой канавку (не показана), выполненную в раме 130. Дорожка 134 может иметь постоянную или в сущности постоянную ширину, независимо от того, является ли она выступом или канавкой. В случае, если дорожка 134 является канавкой, копирный элемент 142, протяженный от каждого из одного или более элементов 112 перемещения, может находиться в зацеплении с канавкой с возможностью перемещения, сдвига или качения. Копирный элемент 142 может быть смещаемым в сторону дорожки 134. В случае, если дорожка 134 является выступом, как показано на данных чертежах, копирный элемент 142, протяженный от каждого из одного или более элементов 112 перемещения, или их частей, может находиться в зацеплении с поверхностью выступа, протяженной в целом перпендикулярно от фронтальной плоскости рамы 130, с возможностью перемещения, сдвига или качения. В одном из воплощений, в которых дорожка 134 является выступающей, от каждого элемента 112 перемещения, или от его частей, могут быть протяженными два или более копирных элемента 142 таким образом, что один из копирных элементов 142 будет находиться в зацеплении с первой поверхностью 144 выступа, а второй копирный элемент 142 будет находиться в зацеплении с противоположной поверхностью 146 выступа. Копирные элементы 142 могут быть валиками или роликами, скользящими или катящимися по дорожке 134 при прохождении элемента 112 перемещения по замкнутому пути вокруг оси 132 вращения. В различных воплощениях копирные элементы 142 могут содержать такие материалы, как металлы, пластмассы и/или полимеры, или покрытия из них, обеспечивающие качение или скользящее движение или качение копирных элементов 142 по дорожке 134.
В случае, если дорожка 134 является канавкой, копирные элементы 142 могут содержать два установленных друг на друга концентричных цилиндра, каждый из которых будет двигаться по одной стороне канавки. Это будет обеспечивать вращение копирных элементов в одном направлении и снимает, или по меньшей мере уменьшает проблему возврата копирного элемента, которая имеет место при использовании единственного копирного элемента в канавке. Копирные элементы могут быть также установлены друг на друга так, что между осями их вращения будет иметься смещение (эксцентрично). С помощью эксцентрика может быть настроен зазор между канавкой и копирными элементами. Для удержания копирного элемента прижатым к одной из поверхностей канавки может использоваться упругий элемент, например, пружина или пневматический цилиндр. Это также дает преимущество в виде возможности использовать только одну из поверхностей канавки.
В случае, если дорожка 134 является выступом, то копирные элементы 142 могут содержать два сопряженных цилиндрических копирных элемента по каждую сторону дорожки 134. При такой конструкции все копирные элементы будут вращаться в одном направлении. Ось вращения одного из копирных элементов может быть настраиваемой для регулировки зазора между копирными элементами и дорожкой 134. Может даже использоваться единственный копирный элемент в сочетании с некоторой упругой силой или силой инерции, удерживающей копирный элемент в контакте с дорожкой 134. Копирный элемент может быть смещаемым в сторону дорожки, например, с помощью упругой пружины или пневматического цилиндра.
Как показано на фиг. 16-18, элементы 112 перемещения могут содержать коллектор газообразной среды, который будет более подробно описан ниже, и который прикреплен к основанию 141, или выполнен за единое целое с основанием 141, и копирные элементы 142 могут быть могут быть установлены, например, с возможностью вращения, на основание 141. Основание 141 может находиться в зацеплении с плитой 155 с возможностью перемещения или сдвига относительно нее таким образом, что элементы 112 перемещения могут совершать движение в радиальном направлении относительно колеса 138 и плиты 155 при движении вдоль дорожки 134. Плита 155 может использоваться для установки частей элементов 112 перемещения и частей узла вращения, который будет описан ниже, на выступы 156 колеса 138, что также будет более подробно описано ниже.
Как показано на фиг. 1 и 4-10, в одном из воплощений колесо 138 может находиться в зацеплении с рамой 130 таким образом, что колесо 138 имеет возможность вращения относительно рамы 130 вокруг оси 132 вращения. На раме 130 могут быть расположены подшипники, которые являются опорами для приводного вала 148 и/или колеса 138. Это обеспечивает возможность вращения колеса 138 и приводного вала 148 вокруг первой оси 132 вращения. Это обеспечивает также правильное положение колеса 138 и приводного вала 148 в осевом направлении. Первая ось 132 вращения может быть расположена центрально внутри контура дорожки 134, хотя и не обязательно в центре дорожки 134. Приводной вал 148, имеющий ось вращения, совпадающую с осью 132 вращения, может приводиться в движение с помощью одного или более приводных элементов 150 и посредством, например, приводного ремня и цепи 152. Приводной вал 148 может находиться в зацеплении с колесом 138 для приведения колеса 138 во вращение. Сведущим в данной области техники будут очевидны и прочие возможные способы приведения приводного вала 148 во вращение, которые для краткости настоящего описания подробно не рассматриваются. Один или более приводных элементов 150 могут обеспечивать вращение приводного вала 148 в направлении по часовой стрелке или против часовой стрелки. Приводной вал 148, используемый для приведения в движение (вращение) колеса 138, может вращаться в любом направлении и с любой скоростью. В одном из воплощений колесо 138 может вращаться в плоскости, в целом параллельной плоскости рамы 130, из которой выступает дорожка 134, или в которой выполнена дорожка 134. Колесо 138 может быть закреплено на приводном валу 148, в результате чего после включения одного или более приводных элементов 150 будут вращаться приводной вал 148 и соответственно колесо 138.
В одном из воплощений колесо 138 может иметь одно или более углублений 154, выполненных по его периметру. Через углубления 154 к частям элементов 112 перемещения могут быть протяженными коллекторы газообразной среды и/или прочие компоненты системы. Кроме того, за счет наличия углублений 154 в колесе 138 данное колесо 138 может иметь меньший вес и соответственно будет обладать меньшей инерцией вращения.
Как показано на фиг. 1 и 4-10, в различных воплощениях колесо 138 может находиться в зацеплении с одним или более элементами 112 перемещения за счет использования плиты 155. Колесо 138 может иметь выступы 156, протяженные от него в сторону рамы 130. на выступы 156 колеса 138 могут быть, например, установлены части плиты 155, протяженные между частью элемента 112 перемещения и узла передачи крутящего момента (который будет более подробно описан ниже), обеспечивающие опору для узла вращения, который включает элемент 112 перемещения. Плита 155 может находиться в подвижном зацеплении с основанием 141, как будет более подробно описано ниже. Части элементов 112 перемещения могут также находиться в зацеплении с валами или валами в сборе, содержащими, например, шлицы, что может обеспечивать возможность движения элементов 112 перемещения в радиальном направлении относительно первой оси 132 вращения. Вал или системы валов могут также обеспечивать возможности поворота частей элементов 112 перемещения относительно колеса 138 вокруг второй оси вращения, которая может быть расположена в целом перпендикулярно, то есть поперек первой оси 132 вращения. Вал, или системы валов, в совокупности с элементами 112 перемещения могут вращаться с колесом 138. Элементы 112 перемещения могут иметь постоянное относительное угловое положение относительно первой оси 132 вращения, и могут иметь одинаковую угловую скорость вращения вокруг первой оси 132 вращения.
В одном из воплощений колесо 138 может находиться в зацеплении с элементами 112 перемещения в количестве, например, от одного до шестнадцати. Все или некоторые из элементов 112 перемещения могут использоваться для переноса дискретных изделий 102 в различных технологических операциях. В различных воплощениях каждый второй, или каждый третий элемент 112 перемещения может использоваться для переноса дискретных изделий 102 в той или иной технологической операции.
Как показано на фиг. 7, 8, 10 и 16, в различных воплощениях один или более копирных элементов 142 могут быть протяженными от основания 141 или другой части элементов 112 перемещения таким образом, что они будут находиться в зацеплении с дорожкой 134 и будут обеспечивать перемещение элементов 112 перемещения в радиальном направлении. Копирные элементы 142 могут быть прикреплены к частям элементов 112 перемещения, или могут быть выполнены за единое целое с элементами 112 перемещения. В данном контексте термин «элементы 112 перемещения» включает в себя не только часть, содержащую поверхность 136 перемещения, а весь узел, имеющий возможность перемещения в радиальном направлении и расположенный на втором конце 204 вала или вала в сборе 200. Узел, совершающий перемещение в радиальном направлении, может, например, включать коллектор газообразной среды, основание 141, копирные элементы 142, корпус и поверхность 136 перемещения. Некоторые из данных компонентов будут более подробно описаны ниже. Вал, шлицы и второй конец вала (все будут более подробно описаны ниже) могут не совершать перемещения в радиальном направлении. В некоторых воплощениях может быть целесообразным использование более, чем двух копирных элементов 142, что может быть, например, вызвано особенностями конструкции дорожки 134 или наличием более чем одной дорожки 134 на раме 130. В одном из воплощений (не показано) на раме могут быть установлены две дорожки для копирных элементов 142, и в зацеплении с каждой дорожкой может находиться один или более копирных элементов 142. Копирные элементы 142, находящиеся в подвижном зацеплении с дорожкой 134, обеспечивают движение элементов 112 перемещения по круговому пути вокруг оси 132 вращения по дорожке 134.
В различных воплощениях форма дорожки 134 может быть такова, что она будет обеспечивать движение копирных элементов 142, и соответственно элементов 112 перемещения, и соответственно, поверхностей 136 перемещения элементов 112 перемещения, в радиальном направлении вовнутрь и наружу при вращении элементов 112 перемещения вокруг оси 132 вращения и их движении по дорожке 134. Путь их движения можно видеть, например, на фиг. 7, 8 и 10. Можно сказать, что путь их движения расположен в целом вокруг оси 132 вращения. Дорожка 134 может содержать первый выступ 158, протяженный в радиальном направлении наружу от оси 132 вращения проксимально по отношению к первому движущемуся несущему элементу 104, и второй выступ 160, протяженный в радиальном направлении наружу от оси 132 вращения и расположенный проксимально по отношению ко второму движущемуся несущему элементу 106. Такая протяженность в радиальном направлении выступов 158 и 160 подразумевается по отношению к не выступающей части 162 дорожки 134. Выступы 158 и 160 могут иметь любую подходящую форму, в целом протяженную в радиальном направлении наружу от оси 132 вращения. Форма выступов 158 и 160, кроме прочего, может задавать тангенциальную составляющую скорости части поверхности 136 перемещения в точках или зонах переноса дискретного изделия с первого движущегося несущего элемента 104 и на второй движущийся несущий элемент 106. Форма выступов 158 и 160 может также частично или полностью обеспечивать постоянство или в сущности постоянство зазора между поверхностями 136 перемещения и поверхностями первого и второго движущихся несущих элементов 104 и 106 в точках или зонах переноса дискретных изделий. Данные выступы могут быть расположены в любых местах дорожки 134, проксимальных к первому движущемуся несущему элементу 104, с которого снимаются дискретные изделия, и второму движущемуся несущему элементу 106, на который укладываются дискретные изделия. В одном из воплощений дорожка 134 может иметь только один выступ 158 или 160, расположенный проксимально по отношению к одному из движущихся несущих элементов: первому 104 или второму 106. Первый выступ 158 может быть расположен в противоположном месте дорожки по отношению ко второму выступу 160, или может быть расположен в ином месте по отношению ко второму выступу 160, в зависимости от относительного расположения подающего первого движущегося несущего элемента 104 и принимающего второго движущегося несущего элемента 106. Радиус дорожки 134 относительно оси 132 вращения может увеличиваться или уменьшаться вдоль дорожки 134, даже в не выступающих ее частях 162. В одном из воплощений радиус дорожки 134 может увеличиваться по меньшей мере, когда части элементов 112 перемещения частично поворачиваются между первым положением 116 и вторым положением 118, что позволяет избежать взаимного препятствия движению друг друга (взаимного контакта) соседних поверхностей 136 перемещения элементов 112 перемещения во время вращения элементов 112 перемещения вокруг второй оси 164. Повышенный радиус дорожки в данных местах заставляет элементы 112 перемещения совершать движение в радиальном направлении наружу по отношению к оси 132 вращения, обеспечивая тем самым адекватный зазор между первой поверхностью 136 перемещения и соседней с ней второй поверхностью 136 перемещения для их вращения между первым положением 116 и вторым положением 118. Вторая ось 164 вращения может быть перпендикулярной, в целом перпендикулярной или поперечной по отношению к оси 132 вращения. В других воплощениях ось 132 вращения может быть протяженной в первом направлении, а вторая ось 164 вращения может быть протяженной во втором направлении, отличном от первого направления. Второе направление, отличное от первого направления, может быть в целом параллельным (например, в пределах от ±1° до ±15°) плоскости рамы 130, от которой является протяженной ось 132 вращения (данная плоскость является в целом перпендикулярной оси 132 вращения). Вращение частей элементов 112 перемещения и пример воплощения узла вращения, конструкция которого обеспечивает возможность такого вращения, будут более подробно описаны ниже.
В одном из воплощений дорожка 134 может иметь такую форму, что расстояние от оси 132 вращения до элементов 112 перемещения в радиальном направлении не будет увеличиваться во время движения поверхностей 136 перемещения между первым положением и вторым положением. В таком воплощении поверхности 136 перемещения могут иметь подходящую форму (например, овальную или круглую), или расположены на подходящем расстоянии друг от друга, так чтобы они могли поворачиваться между первым положением и вторым положением, не касаясь друг друга.
Как показано на фиг. 1 и 4-12, в одном из воплощений каждый из элементов 112 перемещения может содержать поверхность 136 перемещения на самой удаленной своей части по отношению к оси 132 вращения, как упоминалось выше. Поверхность 136 перемещения может быть плоской или в сущности плоской в одном или более направлениях. На фиг. 11 показана поверхность перемещения, плоская или в сущности плоская в первом направлении, в то время как на фиг. 12 показана поверхность перемещения, плоская или в сущности плоская во втором направлении. Под в сущности плоской в контексте настоящего описания понимается, что поверхность 136 перемещения, используемая как опора для перемещения дискретных изделий 102, прилегает к плоскости в пределах примерно 0-10 мм, а в некоторых воплощениях в пределах примерно 0-5 мм, не включая областей отверстий для газообразной среды и отверстий под болты, как будет описано ниже. Показанные примеры поверхностей 136 перемещения имеют прямоугольную форму, но при этом подразумевается, что могут использоваться и другие поверхности перемещения с элементами 112 перемещения в соответствии с настоящим изобретением, имеющие любую другую подходящую форму, например, квадратную, круглую или овальную. В одном из воплощений часть каждой из поверхностей 136 перемещения может быть плоской, или в сущности плоской, в то время как остальные части могут иметь дугообразный профиль. Части элементов 112 перемещения, поддерживающие поверхности 136 перемещения (например, части, прикрепленные к дистальному концу корпуса 278, как будет подробно описано ниже) могут быть плоскими, в сущности плоскими или иметь дугообразный профиль.
За счет обеспечения плоских, или в сущности плоских поверхностей 136 перемещения достигается важное преимущество, которое заключается в том, что «плоскостность» поверхностей 136 перемещения является одинаковой, или в сущности одинаковой, независимо от того, находится ли поверхность 136 перемещения в первом положении 116, или она повернута во второе положение 118 вокруг второй оси 164 вращения. В одном из воплощений поверхность 136 перемещения может иметь плоскую, или в сущности плоскую головную часть, дугообразную среднюю часть и плоскую или в сущности плоскую хвостовую часть. Такая геометрия поверхности 136 перемещения может использоваться, например, для обеспечения переноса изделия с в сущности постоянным зазором в головной и хвостовой частях (но не в средней части). Как упоминалось выше, в аналогичных системах перемещения в соответствии с существующим уровнем техники, имеющих поверхности перемещения дугообразного профиля, протяженного в целом в продольном направлении поверхности перемещения, как только элемент перемещения повернут во второе положение (расположенное в целом под углом 90° к первому положению), перенос дискретных изделий становится проблемой, поскольку кривизна профиля расположена в неподходящем направлении по отношению ко второму движущемуся несущему элементу. Иными словами, если направление кривизны профиля является подходящим для подхвата дискретного изделия с первого движущегося несущего элемента, оно в целом не является подходящим для сброса дискретного изделия на второй движущийся несущий элемент, поскольку наружные края поверхности переноса могут быть более удаленными от второго движущегося несущего элемента, что может приводить к неточному переносу изделия. Плоская, или в сущности плоская поверхность 136 перемещения в соответствии с настоящим изобретением позволяет решить данную проблему за счет обеспечения одинакового, или в сущности одинакового расстояния или зазора между всеми частями, или большинством частей поверхности 136 перемещения и движущимся несущим элементом после того, как поверхность 136 перемещения повернута из первого положения 116 во второе положение 118 вокруг второй оси 164 вращения. Это может обеспечивать более точный перенос дискретных изделий и более высокую скорость переноса.
Опять же, как упоминалось выше, в системах перемещения в соответствии с существующим уровнем техники, в которых используются плоские, или в сущности плоские поверхности перемещения, может возникнуть еще одна проблема, вызванная тем, что их элементы перемещения не имеют возможности смещаться в радиальном направлении вовнутрь и наружу по отношению к оси вращения систем перемещения. Данная проблема отчасти связана с тем, что может иметься существенный зазор в точке переноса дискретного изделия во время прохождения определенных частей плоской, или в сущности плоской поверхности перемещения через точку или зону переноса дискретного изделия. В таком случае головные края и хвостовые края плоской поверхности перемещения могут быть расположены достаточно близко к движущемуся несущему элементу, в то время как средняя часть поверхности перемещения, из-за своей плоской, или в сущности плоской конфигурации, может быть расположена несколько дальше от движущегося несущего элемента. Данный зазор между средней частью плоского, или в сущности плоского элемента перемещения и движущимся несущим элементом, и/или непостоянство данного зазора могут приводить к низкой или совсем неприемлемой точности переноса, особенно при высоких скоростях переноса, которые являются желательными в массовом производстве абсорбирующих изделий. Низкая точность переноса может приводить, например, к сложению самих с собой отдельных частей дискретного изделия.
Как показано на фиг. 7, 8 и 10С, настоящее изобретение позволяет решить данную проблему зазора, в частности, зазора в средней части, присущую существующим поверхностям перемещения, за счет обеспечения дорожки 134 с выполненными на ней выступами 158 и 160, расположенными вблизи движущихся несущих элементов 104 и 106. За счет наличия таких выступов 158 и 160, поверхности 136 перемещения элементов 112 перемещения в соответствии с настоящим изобретением могут сохранять постоянный, или в сущности постоянный (например, в пределах 0,1-2 мм или 0,1-3 мм) зазор, или минимальный зазор между ними и движущимися несущими элементами 104 и 106 в точке или зоне переноса дискретного изделия. На фиг. 10А-10С показаны последовательные этапы прохождения поверхности 136 перемещения мимо второго движущегося несущего элемента 106 в направлении, обозначенном стрелкой А. На фиг. 13А-13С показаны последовательные этапы прохождения поверхности 136 перемещения мимо первого движущегося несущего элемента 104 в направлении, обозначенном стрелкой В. В одном из воплощений данный зазор может быть постоянным, или в сущности постоянным, затем непостоянным и затем снова постоянным или в сущности постоянным в точке или зоне переноса дискретного изделия, то есть при прохождении поверхности 136 перемещения мимо одного из движущихся несущих элементов. Точкой или зоной переноса дискретного изделия может считаться точка или зона, в которой часть дискретного изделия 102 покидает первый движущийся несущий элемент 104 и переходит на поверхность 136 перемещения. Точкой или зоной переноса дискретного изделия может считаться точка или зона, в которой часть дискретного изделия 102 покидает поверхность 136 перемещения и переходит на второй движущийся несущий элемент 106. Поскольку поверхности 136 перемещения в соответствии с настоящим изобретением являются плоскими или в сущности плоскими, то может требоваться некоторое перемещение поверхностей 136 перемещения в радиальном направлении наружу и вовнутрь при прохождении поверхности 136 перемещения через точку или зону переноса дискретного изделия с движущегося несущего элемента 104 или на второй движущийся несущий элемент 106. Выступы 158 и 160 обеспечивают такое движение элементов 112 перемещения в радиальном направлении, поскольку элементы 112 перемещения находятся в подвижном зацеплении с дорожкой 134 и движутся по замкнутому пути вокруг оси 132 вращения в соответствии с формой дорожки 134. В результате этого каждый из элементов 112 перемещения, и соответственно, каждая из поверхностей 136 перемещения будет двигаться с постоянной или переменной скоростью в радиальном направлении наружу относительно оси 132 вращения от момента, или примерно в тот момент, когда головной край поверхности 136 перемещения находится в непосредственной близости к точке или зоне переноса дискретного изделия, и примерно до того момента, как средняя точка, или средняя часть (относительно направления движения в машине) поверхности 136 перемещения будет находиться в точке или зоне переноса дискретного изделия, или в непосредственной близости к такой точке или зоне. Начиная с данного момента поверхность 136 перемещения будет двигаться равномерно или с переменной скорости в радиальном направлении вовнутрь до тех пор, пока хвостовой край поверхности 136 перемещения не будет находиться в точке переноса дискретного изделия, или не пройдет данную точку, или до тех пор, пока элемент 112 перемещения не пройдет через выступ 158 или 160, и не вернется на не выступающую часть 162 дорожки 134.
В различных воплощениях угловая скорость вращения элементов 112 перемещения вокруг оси 132 вращения может быть постоянной или является постоянной или в сущности постоянной, в том смысле, что скорость вращения вала 148 и колеса 138 может быть постоянной. В связи с этим тангенциальная составляющая скорости поверхностей 136 перемещения может быть переменной, изменяясь при движении элементов 112 перемещения в радиальном направлении наружу и вовнутрь. В целом, когда элементы 112 перемещения движутся в радиальном направлении наружу, тангенциальная составляющая скорости поверхностей 136 перемещения будет увеличиваться, в то время как при движении элементов 112 перемещения в радиальном направлении вовнутрь тангенциальная составляющая скорости поверхностей 136 перемещения будет уменьшаться вследствие вращения элементов 112 перемещения с постоянной угловой скоростью вокруг оси 132 вращения. Тангенциальная составляющая скорости поверхностей 136 перемещения в точке или зоне переноса дискретного изделия может быть постоянной или в сущности постоянной (например, в пределах 0,1%-2%) и соответствовать тангенциальной составляющей скорости первого или второго движущегося несущего элемента 104 или 106 соответственно во время переноса дискретного изделия. Это может быть достигнуто за счет поддержания в сущности постоянного смещения в радиальном направлении между зоной переноса дискретного изделия и осью 132 вращения. Смещение поверхности 136 перемещения в радиальном направлении корректируется за счет движения копирных элементов по выступам 158 и 160. За счет обеспечения постоянных, или в сущности постоянных тангенциальных составляющих скорости поверхностей 136 перемещения в точках или зонах переноса дискретных изделий может быть достигнут более мягкий и синхронизированный по скорости перенос дискретных изделий. Размерные параметры выступов 158 и 160 могут быть подобраны таким образом, что первый выступ будет обеспечивать движение поверхности 136 перемещения с первой тангенциальной составляющей скорости в первой точке или зоне переноса дискретного изделия (например, подхвата), а второй выступ обеспечивает движение той же самой поверхности 136 перемещения со второй тангенциальной составляющей скорости во второй точке или зоне переноса дискретного изделия (например, сброса). Таким образом система 100 перемещения может подхватывать дискретное изделие 102 с первого движущегося несущего элемента 104, имеющее первую скорость или первую тангенциальную составляющую скорости в первой точке или зоне переноса дискретного изделия, и может сбрасывать дискретное изделие 102 на второй движущийся несущий элемент 106, со второй скоростью или тангенциальной составляющей скорости во второй точке переноса дискретного изделия. В одном из воплощений система перемещения может иметь конструкцию, обеспечивающую подхват дискретных изделий со второго движущегося несущего элемента 106 и их перенос на первый движущийся несущий элемент 104. В таком воплощении направление вращения элементов 112 перемещения вокруг оси 132 вращения может быть по часовой стрелке или против часовой стрелки.
Система 100 перемещения может использоваться для переноса дискретных изделий 102 с первого движущегося несущего элемента 104 с первым шагом (то есть, расстоянием между дискретными изделиями) на второй движущийся несущий элемент 106 со вторым шагом, то есть, с изменением шага. Система 100 перемещения может успешно использоваться для переноса дискретных изделий 102 между первым и вторым движущимися несущими элементами 104 и 106 с увеличением шага, уменьшением шага или с сохранением шага.
Перенос дискретных изделий 102 с поверхности 136 перемещения на второй движущийся несущий элемент 106 с использованием системы 100 перемещения в соответствии с настоящим изобретением обеспечивает возможность удобного и эффективного крепления дискретных изделий 102 к полотнам 124 и 126 передних и задних поясков, или к передним и задним пояскам, благодаря тому, что между поверхностью 136 перемещения и вторым движущимся несущим элементом 106 может быть настроен постоянный, или в сущности постоянный зазор, что в свою очередь обеспечивает постоянное давление скрепления компонентов между поверхностью 136 перемещения и вторым движущимся несущим элементом 106. Благодаря постоянному, или в сущности постоянному зазору, на площадь всего дискретного изделия 102, или части дискретного изделия 102 будет воздействовать постоянное, или в сущности постоянное давление скрепления. Это может быть полезным для выполнения тех или иных видов скрепления между дискретным изделием 102 и полотнами 124 и 126 переднего и заднего поясков, например, если используется адгезив типа «термоклей» или адгезив, чувствительный к давлению.
Для улучшения качества переноса дискретных изделий с поверхностей перемещения, которые не являются плоскими, может использоваться система 100 перемещения с механизмом переменного радиуса элемента перемещения. Так, например, может быть произведена настройка положения в радиальном направлении поверхности перемещения, имеющей дугообразный профиль, во время переноса дискретного изделия с первого движущегося несущего элемента 104 или на второй движущийся несущий элемент 106. Подобным образом может быть настроено положение в радиальном направлении любой неплоской поверхности перемещения, что будет способствовать улучшению качества переноса дискретных изделий с первого движущегося несущего элемента 104 на второй движущийся несущий элемент 106. Сведущим в данной области техники будет очевидно, что устройства с переменным радиусом в соответствии с настоящим изобретением могут использоваться как в существующих системах перемещения, так и в системах перемещения в соответствии с настоящим изобретением. В таких случаях подразумевается, что все такие конструкции входят в масштаб настоящего изобретения.
На фиг. 13-18 показан узел 170 вращения для одного, нескольких или всех элементов 112 перемещения системы 100 перемещения. Для наглядности и большей ясности конструкции узла 170 вращения на фиг. 13-18 не показаны некоторые части системы 100 перемещения, некоторые элементы перемещения и некоторые другие компоненты. Узел 170 вращения можно также видеть в изображении системы 100 перемещения на фиг. 7 и 8. Узел 170 вращения может иметь более простую конструкцию и меньшую стоимость изготовления, чем обычный узел вращения в виде кулачкового барабана, может иметь больший срок службы копирных элементов, и может обеспечивать меньший угол давления на дорожку 134. Как было описано выше, система 100 перемещения может содержать раму 130, определяющую первую ось 132 вращения, вокруг которой могут вращаться один или более элементов 112 перемещения (смотри фиг. 3, 4 и 6-8). Узел 170 вращения может вращать части элементов 112 перемещения вокруг второй оси 164 вращения между первым положением 116 и по меньшей мере вторым положением 118. Первая ось 132 вращения может быть перпендикулярна, в целом перпендикулярной (например, в пределах от 1° до 15°), или поперечной по отношению ко второй оси 164 вращения. В других воплощениях первая ось 132 вращения может быть протяженной в первом направлении, а вторая ось 164 вращения может быть протяженной во втором направлении, отличном от первого направления. В некоторых воплощениях первая ось 132 вращения может не пересекать второй оси 164 вращения.
Как показано на фиг. 13-20, в одном из воплощений узел 170 вращения может содержать узел 174 передачи крутящего момента, содержащий ведущий элемент 176 и ведомый элемент 178. Узел 174 передачи крутящего момента может содержать шестеренчатую передачу с поворотом оси вращения на 90°, или передачу иного типа. В некоторых воплощениях узел 174 передачи крутящего момента может не содержать шестеренчатой передачи, а может представлять собой любой другой подходящий механизм, обеспечивающий передачу крутящего момента между перпендикулярными или в сущности перпендикулярными валами, например, может представлять собой червячную передачу, коническую передачу, гипоидную передачу, планетарную передачу, ременную передачу, цепную передачу, гидравлический привод и/или трехмерные механизмы передачи крутящего момента. Ведущий элемент 176 и ведомый элемент 178 могут быть ведущим валом и ведомым валом соответственно. Валы могут иметь любую подходящую длину и/или любые другие подходящие размеры. Ведущий элемент 176 может быть протяженным в направлении, параллельном или в целом параллельном оси 132 вращения, а ведомый элемент 178 может быть протяженным в направлении, параллельном, в целом параллельном или соосном второй оси 164 вращения.
Как показано на фиг. 19 и 20, узел 174 передачи крутящего момента может содержать две или более шестерен. На фиг. 19 показан аксонометрический вид узла 174 передачи крутящего момента (и некоторых других компонентов) с частичным разрезом, а на фиг. 20 показан вид сверху узла 174 передачи крутящего момента (и некоторых других компонентов) с частичным разрезом. Шестерни могут содержать зубья (не показаны), находящиеся в зацеплении друг с другом. Если в передаче используются две шестерни, то первая шестерня 180 может находиться в функциональном зацеплении со второй шестерней 182, и может иметь ось 184 вращения, которая является поперечной, перпендикулярной или в целом перпендикулярной оси 186 вращения второй шестерни 182. Узел 174 передачи крутящего момента может повышать скорость вращения, например, может быть передачей, повышающей скорость вращения в от 1 до 1,5, от 1 до 2, от 1 до 2,5, или от 1 до 3 раз. Сведущим в данной области техники будет понятно, что могут также использоваться иные узлы, повышающие скорость вращения, и они могут повышать скорость вращения в любое число раз. Один из примеров узла 174 передачи крутящего момента, повышающего скорость вращения, будет более подробно описан ниже. В других воплощениях 174 может понижать скорость вращения или не изменять скорости вращения, например, может уменьшать скорость вращения в от 2 до 1 раза, или может иметь общее передаточное число 1:1. Сведущим в данной области техники будет понятно, что могут использоваться и другие узлы уменьшения скорости вращения, и что скорость может быть уменьшена в любое подходящее число раз.
В некоторых воплощениях узел 170 вращения может также содержать тягу 188, содержащую первый конец 190, функционально связанный или неподвижно закрепленный на ведущем элементе 176, и второй конец 192, содержащий копирный элемент 194. Ведущий элемент 176 может быть функционально связан с тягой 188 посредством шпонки 172 или другого механического компонента или узла, конфигурация которого вызывает вращение ведущего элемента 176 при вращении тяги 188 вокруг ее первого конца 190. Иными словами, ведущий элемент 176 может быть прикреплен к тяге 188 без возможности вращения относительно нее, в результате чего при вращении тяги 188 вокруг ее первого конца 190 ведущий элемент 176 будет вращаться синхронно с первым концом 190 тяги 188. Тяга 188 может приводиться в движение вокруг своего первого конца 190 при движении копирного элемента 194 в радиальном направлении относительно первой оси 132 по дорожке 198, как будет более подробно обсуждаться ниже. Копирный элемент 194 может быть элементом, работающим по кулачковой поверхности, и в одном из воплощений может содержать валик, прикрепленный ко второму концу 192 тяги 188, или находящийся в зацеплении с ним с возможностью вращения. В некоторых воплощениях копирный элемент может не быть валиком, и может быть прикреплен ко второму концу 192 тяги или может быть выполнен за единое целое с ним. В одном из воплощений один или более копирных элементов 194 могут содержать такие материалы, как металлы, пластмассы и/или полимеры, или покрытия из таких материалов, обеспечивающих возможность относительного движения между одним или более копирными элементами 194 и дорожкой 198 (именуемой далее второй дорожкой 198). Копирные элементы 142 и дорожка 134 могут содержать аналогичные элементы. Вторая дорожка 198 может быть протяженной вокруг первой оси 132 вращения, и ее может окружать первая дорожка 134, описанная выше. В любом случае, «внутренняя» дорожка 198 может находиться в зацеплении с одним или более копирными элементами 194 узла 170 вращения. Дорожка 198 может содержать те же материалы, или может быть покрыта теми же материалами, что и копирные элементы 194, или может содержать другие материалы, или может быть покрыта другими материалами.
Как показано на фиг. 13-18, в одном из воплощений узел 170 вращения может содержать вал или вал в сборе 200, содержащий первый конец 202, находящийся в зацеплении или функционально связанный с ведомым элементом 178 узла 174 передачи крутящего момента, и второй конец 204, находящийся в зацеплении или функционально связанный с частью элемента 112 перемещения. Первый конец 202 вала 200 может быть функционально связан с ведомым элементом 178 посредством шпонки 172, в результате чего при вращении ведомого элемента 178 вал 200 может вращаться по меньшей мере частично вокруг второй оси 164 вращения. Иными словами, вращение ведомого элемента 178 может вызывать вращение вала 200. В одном из воплощений часть вала 200, или весь вал 200 может иметь канавку или паз, выполненный в направлении, параллельном или в целом параллельном его продольной оси. От части элемента 112 перемещения или от ведомого элемента 178 в точке его соединения с валом 200, или в непосредственной близости к данной точке может быть протяженной шпонка (не показана). Шпонка может обеспечивать возможность движения элемента 112 перемещения в радиальном направлении вовнутрь и наружу по отношению к первой оси 132 вращения при вращении частей элемента 112 перемещения вокруг первой ось 132 вращения и движении по дорожке 134, как обсуждалось выше. Вал 200 может быть протяженным вовнутрь части элемента 112 перемещения, например, в коллектор 256 газообразной среды или корпус 278 (как обсуждалось выше), или в узел 174 передачи крутящего момента, в результате чего может изменяться расстояние между принимающей вал частью элемента 112 перемещения и ведомым элементом 178 (то есть, длина части вала 200, расположенной между принимающей вал частью элемента 112 перемещения и узлом 174 передачи крутящего момента). Шпонка может также обеспечивать вращение вала 200 вокруг второй оси 164 вращения от ведомого элемента 178. В сущности, система шпонки и паза обеспечивает возможность вращения вала 200 вокруг второй оси 164 вращения и изменения длины части вала 200, расположенной между принимающей вал частью элемента 112 перемещения и узлом 174 передачи крутящего момента.
В одном из воплощений вал может содержать вал в сборе 200, содержащий шлицы 206 и принимающий шлицы элемент 208. Принимающий шлиц элемент 208 может быть расположен на части элемента 112 перемещения или ведомого элемента 178, или находиться в зацеплении с ними, или может находиться в непосредственной близости к месту зацепления с концевой частью шлицов 206. Если принимающий шлицы элемент 208 расположен на ведомом элементе 178, то ведомый элемент 178 может быть полым, так чтобы через него могли быть протяженными шлицы. Шлицы 206 могут находиться в скользящем зацеплении с принимающим шлицы элементом 208, в результате чего может изменяться расстояние между самой близкой частью 112 и ведомым элементом 178 при движении элемента 112 перемещения в радиальном направлении относительно первой оси 132 вращения. Конец шлицов 206, не находящийся в зацеплении с принимающим шлиц элементом 208, может находиться в зацеплении, или может быть функционально связанным с ведомым элементом 178 или с частью элемента 112 перемещения. В таком воплощении при движении элемента 112 перемещения в радиальном направлении наружу или вовнутрь при его движении по первой дорожке 134 может изменяться длина части шлица 206, расположенной между элементом 112 перемещения и ведомым элементом 178. Шлицы 206 и принимающий шлицы элемент 208 могут обеспечивать вращение шлицов 206 вокруг второй оси 164 вращения под действием ведомого элемента 178 при одновременном движении элемента 112 перемещения в радиальном направлении относительно первой оси 132 вращения. Сведущим в данной области техники будет очевидно, что в масштаб настоящего изобретения входят также другие конструкции вала в сборе, обеспечивающие возможность изменения длины части вала, расположенной между элементом 112 перемещения и ведомым элементом 178.
В одном из воплощений, хотя это не показано, вал в сборе может содержать вал и часть, принимающую вал. Вал может находиться в скользящем зацеплении с частью, принимающей вал, в виде телескопической конструкции (не показана), обеспечивающей возможность удлинения и сокращения вала в сборе в осевом направлении вдоль первой оси вращения. Вал может находиться в зацеплении с частью, принимающей вал без возможности их относительного вращения, в результате чего ведомый элемент 178 может приводить во вращение вал и часть, принимающую вал.
Как показано на фиг. 7, 8, 10 и 13-15, в одном из воплощений узел 170 вращения может находиться в зацеплении с дорожкой или второй дорожкой 198, расположенной в раме или на раме 130, окружая первую ось 132 вращения. Вторая дорожка 198 может быть окружена первой дорожкой 134, и таким образом, вторая дорожка 198 может считаться внутренней дорожкой, а первая дорожка 134 может рассматриваться, как наружная дорожка по отношению к первой оси 132 вращения. В формуле изобретения внутренняя дорожка и наружная дорожка могут именоваться дорожкой, первой дорожкой или второй дорожкой, в зависимости от того, какая из дорожек упоминается первой. Как показано на фиг. 14, первая точка 210, расположенная в первом месте на второй дорожке 198, может быть расположена на расстоянии D1 от первой оси 132 вращения, а вторая точка 212, расположенная во втором месте на второй дорожке 198, может быть расположена на втором расстоянии D2 от первой оси 132 вращения. Первое расстояние D1 может быть отличным от второго расстояния D2. Прочие точки на второй дорожке 198 могут находиться на других расстояниях от первой оси вращения 132. Такое изменение расстояния от различных точек на второй дорожке 198 по отношению к первой оси 132 вращения может обеспечивать возможность вращения вала или вала в сборе 200 вокруг второй оси 164 вращения, и соответственно передвижение части элемента 112 перемещения между первым положением 116 и по меньшей мере вторым положением 118.
В некоторых воплощениях вторая дорожка 198 может быть кулачковой дорожкой или радиальным кулачком. В одном из воплощений (хотя оно не показано), вторая дорожка 198 является аналогичной первой дорожке 134 и может быть протяженной наружу от фронтальной плоскости рамы 130, образуя выступ, окружающий первую ось 132 вращения. В таком воплощении вторая дорожка 198 может быть выполнена за единое целое с рамой 130 или может быть прикреплена к раме 130. Выступ может содержать первую боковую поверхность, вторую боковую поверхность и верхнюю поверхность. Первая боковая поверхность может быть расположена параллельно или в целом параллельно (например, в переделах от 0° до 15°) второй боковой поверхности. Верхняя поверхность выступа может быть протяженной параллельно или в целом параллельно плоскости рамы 130 и перпендикулярно, или в целом перпендикулярно первой и второй боковым поверхностям. Расстояние между первой боковой поверхностью может быть постоянным, в сущности постоянным или переменным. Со вторым концом 192 тяги 188 могут находиться в зацеплении (или могут быть прикреплены к нему, или выполнены с ним за единое целое) два копирных элемента, и каждый из них может находиться в подвижном зацеплении с одной из боковых поверхностей выступа. В одном из воплощений, в котором имеются два копирных элемента, могут использоваться две тяги, на втором конце каждой из которых имеется копирный элемент, как это будет очевидно сведущим в данной области техники. Копирные элементы могут быть смещаемыми к боковым сторонам выступа.
Как показано на фиг. 13-15, еще в одном из воплощений вторая дорожка 198 может быть кулачковой дорожкой или канавкой, выполненной во фронтальной плоскости рамы 130 и окружающей первую ось 132 вращения. Кроме того, кулачковая дорожка или канавка могут быть дополнительно окружены выступом 214, расположенным немного далее в радиальном направлении от первой оси 132 вращения, чем сама канавка. Выступ 214 может иметь постоянную ширину, или его ширина может быть переменной вдоль его длины. За счет наличия выступа 214 канавка может быть частично или даже полностью выполнена в фронтальной плоскости рамы 130. Канавка может быть также выполнена между выступом 214 и еще одним выступом 215, протяженным от фронтальной плоскости рамы 130. Если выступа 214 нет, канавка может быть полностью выполнена во фронтальной плоскости рамы 130. В различных воплощениях один или более копирных элементов 194 могут быть по меньшей мере частично расположены в кулачкой дорожке или канавке 198, и могут находиться в зацеплении с боковыми стенками второй кулачковой дорожки или канавки 198 при вращении элементов 112 перемещения вокруг первой оси 132 вращения. Независимо от того, является ли вторая дорожка 198 выступом или канавкой, любой из копирных элементов 194 может находиться в подвижном зацеплении со второй дорожкой 198, и может двигаться вокруг первой ось 132 вращения по пути, определяемому второй дорожкой 198.
Как показано на фиг. 13-15, в одном из воплощений канавка 198 может иметь первую поверхность 216 и вторую поверхность 218 на части канавки, расположенной ближе всего к оси 132 вращения. Выступ 214 может также иметь первую поверхность 220 и вторую поверхность 222, на части выступа, наиболее близкой к оси 132 вращения. Первая поверхность 216 и вторая поверхность 218 могут быть расположены на различных расстояниях от первой оси 132 вращения. Подобным образом, первая поверхность 220 и вторая поверхность 222 могут быть расположены на различных расстояниях от первой оси 132 вращения. Расстояние между первой поверхностью 216 и второй поверхностью 220 может быть одинаковым или в сущности одинаковым, и подобным образом расстояние между первой поверхностью 218 и второй поверхностью 222 может быть одинаковым или в сущности одинаковым. Иными словами, первая поверхность 216 может быть смещена относительно второй поверхности 218, а первая поверхность 220 может быть смещена относительно второй поверхности 222. В таком воплощении второй конец 198 тяги 188 может содержать первый копирный элемент 194 и второй копирный элемент 194. В одном из воплощений копирные элементы 194 могут находиться в зацеплении со вторым концом 198 тяги 188 с возможностью вращения, реализованной с помощью шпильки, болта или иного подходящего механизма или компонента крепления. Первый копирный элемент 194 может находиться в зацеплении с первой поверхностью 216, а второй копирный элемент 194 может находиться в зацеплении со второй поверхностью 222. Поверхности 218 и 220 могут не находиться в зацеплении с копирными элементами 194 ввиду их смещения относительно поверхностей 216 и 222 соответственно. За счет наличия в сущности двух кулачковых дорожек в канавке и двух копирных элементов 194, каждый копирный элемент может поворачиваться только в одном направлении. В других воплощениях вторая дорожка 198 может иметь только по одной поверхности на каждой стороне канавки, и по дорожке 198 может бегать только один копирный элемент 194.
Как показано на фиг. 7, 8, 10 и 13-20, в одном из воплощений при движении одного или более кулачковых элементов 194 в радиальном направлении относительно первой оси 132 вращения, при их круговом движении по второй дорожке 198, тяга 188 может вращаться по часовой стрелке или против часовой стрелки вокруг своего первого конца 190, прилагая тем самым силу или вращающий момент к ведущему элементу 176. Вследствие этого узел 174 передачи крутящего момента может прилагать вращающую силу к ведомому элементу 178 и соответственно далее к валу или валу в сборе 200, который находится в шестеренчатом зацеплении с узлом 174 передачи крутящего момента. В одном из воплощений ведущий элемент 176 может поворачиваться с первым концом 190 тяги 188 на первую угловую величину, и может сообщать вращение ведомому элементу 178 на вторую угловую величину, и соответственно далее к валу или валу в сборе 200, который находится в шестеренчатом зацеплении с узлом 174 передачи крутящего момента. Вторая угловая величина может быть больше, чем первая угловая величина. Вращение вала или вала в сборе 200 может вызывать движение элемента 112 перемещения между первым положением 116 и вторым положением 118 вокруг второй оси 164 вращения. По меньшей мере часть такого вращения между первым положением 116 и вторым положением 118 может происходить, когда первая дорожка 134 увеличивает расстояние в радиальном направлении между элементом 112 перемещения и ведомым элементом 178, или когда элемент 112 перемещения сдвигается в радиальном направлении наружу относительно первой оси 132 вращения первой дорожкой 134. Вторая ось 164 вращения может быть осью, протяженной вдоль продольной оси вала или вала в сборе 200. За один оборот элемента 112 перемещения вокруг первой оси 132 вращения вал или вал в сборе 200 может быть повернут из первого положения 116 во второе положение 118 и затем обратно в первое положение 116. При повороте элемента 112 перемещения между первым положением 116 и вторым положением 118 поверхности 136 перемещения могут поворачиваться на угол, составляющий от 45° до 180°, от 60 до 150°, от 75° до 105°, примерно 90° (например, ±3°), или 90°. Все значения углов и под-диапазонов углов в пределах указанных диапазонов следует считать, как явно упомянутые, хотя они и не приведены для краткости описания.
В одном из воплощений вторая дорожка 198 может изменять угол поворота элемента 112 перемещения вокруг второй оси 164 вращения за счет изменяющегося радиуса копирного элемента 194. Вторая дорожка 198 может также содержать области, в которых радиус копирных элементов 194 и угол поворота элементов 112 перемещения остаются постоянными или почти постоянными. Данные области могут быть полезны, когда элемент 112 перемещения находится в первом положении 116 и во втором положении 118, то есть во время переноса дискретных изделий 102 с первого движущегося несущего элемента 104 на второй движущийся несущий элемент 106.
Несмотря на то, что в качестве примера узел 170 вращения изображен, как используемый в сочетании с предлагаемой системой 100 перемещения, на самом деле узел 170 вращения может использоваться и с другими системами перемещения, известными сведущим в данной области техники или в настоящее время разрабатываемыми, и может функционировать независимо от конкретной системы 100 перемещения. В одном из воплощений могут использоваться системы перемещения, отличные от системы перемещения, с которой используется узел 170 вращения, которые могут не иметь элементов перемещения, совершающих движение в радиальном направлении относительно первой оси 132 вращения. В одном из воплощений узел 170 вращения может использоваться с элементами перемещения, имеющими переменное угловое положение относительно первой оси 132 вращения.
В одном из воплощений элементы 112 перемещения под воздействием копирных элементов могут совершать движение в радиальном направлении наружу таким образом, что будут обеспечены достаточные зазоры для вращения соседних элементов 112 перемещения вокруг второй оси 164 вращения. В других воплощениях форма элементов 112 перемещения или зазоры между ними таковы, что изменения положения элементов 112 перемещения в радиальном направлении (путем увеличения расстояния до оси вращения) при вращении вокруг второй оси 164 вращения может не требоваться. В другом воплощении для увеличения зазоров с соседними элементами 112 перемещения при вращении вокруг второй оси 164 вращения расстояние от элементов 112 перемещения до оси вращения может уменьшаться. Еще в одном воплощении элементы 112 перемещения или их части могут откидываться относительно первой оси 132 вращения для увеличения зазоров с соседними элементами 112 перемещения при вращении вокруг второй оси 164 вращения.
В одном из воплощений предлагается способ перемещения одного или более дискретных изделий 102 с первого движущегося несущего элемента 104 на второй движущийся несущий элемент 106 с помощью системы 100 перемещения. Система 100 перемещения может содержать раму, определяющую первую ось вращения, и один или более элементов перемещения, каждый из которых содержит поверхность перемещения, конфигурация которой обеспечивает прием одного или более дискретных изделий. Способ может содержать вращение одного или более элементов перемещения вокруг первой оси вращения и селективное изменение расстояния в радиальном направлении от одной или более поверхностей перемещения до первой оси вращения во время вращения одного или более элементов вращения вокруг первой оси вращения. Способ может также содержать вращение одной или более поверхностей перемещения и прочих частей элементов перемещения вокруг второй оси вращения между первым положением и по меньшей мере вторым положением с помощью дорожки, окружающей первую ось вращения, одного или более копирных элементов, движущихся по замкнутому пути, определяемому дорожкой, при вращении элемента перемещения вокруг первой оси вращения, узла передачи крутящего момента, тяги, содержащей первый конец, функционально связанный с первой частью узла передачи крутящего момента, и второй конец, содержащий один или более копирных элементов, и вал в сборе, находящийся в функциональном зацеплении со второй частью узла передачи крутящего момента на первом конце и в зацеплении с частью элемента перемещения на втором конце. Первая, или ведущая, часть узла передачи крутящего момента может быть расположена параллельно, или в целом параллельно, первой оси вращения, а вторая часть, или ведомый вал узла передачи крутящего момента может быть расположен параллельно, или в целом параллельно второй оси вращения. Способ может содержать увеличение и сокращение длины вала в сборе между каждым элементом перемещения и каждой ведомой частью во время упомянутого выше селективного изменения расстояния в радиальном направлении между одной или более поверхностей перемещения и первой осью вращения. Способ может также содержать вращение одной или более поверхностей перемещения по меньшей мере частично между первым и вторым положениями во время увеличения длины валов в сборе между элементами перемещения и ведомыми частями, и поворот дискретных изделий за счет такого вращения поверхностей перемещения между первым положением и вторым положением. Поверхности перемещения и прочие части элементов перемещения могут быть повернуты из первого положения во второе положение в первом направлении вращения, и могут быть повернуты из второго положения в первое положение во втором направлении вращения. Первое направление вращения может быть противоположным второму направлению вращения. В других воплощениях первое направление вращения может совпадать со вторым направлением вращения. Одно или более дискретных изделий могут удерживаться на поверхностях перемещения или сбрасываться с поверхностей перемещения с использованием давления газообразной среды, например, положительного или отрицательного давления газообразной среды.
В одном из воплощений различные дискретные изделия 102 (например, базовые части абсорбирующего изделия) или гибкие дискретные изделия 102 могут удерживаться на различных поверхностях перемещения 136 элементов 112 перемещения в соответствии с настоящим изобретением различными способами, включая, но не ограничиваясь ими, давление газообразной среды, механические устройства, например, штырьки или прижимные планки, адгезивы, например, адгезивы, чувствительные к давлению или слабо клеящиеся адгезивы, электростатическое притяжение и/или магнитное притяжение. Давление газообразной среды и/или прочие виды сил могут также использоваться для снятия дискретных изделий 102 с поверхностей перемещения и их переноса на движущийся несущий элемент, например, на второй движущийся несущий элемент 106.
Как показано на фиг. 1, 4-6, 8, 9, 16 и 18, в одном из воплощений система 100 перемещения может содержать систему с использованием газообразной среды, конфигурация которой обеспечивает удержание дискретных изделий 102 на одной или более поверхностях перемещения 136 элементов 112 перемещения. Каждый из одного или более элементов 112 перемещения может иметь одно или более отверстий 230 для газообразной среды, проходящих через их поверхности 136 перемещения, или через части или зоны поверхностей 136 перемещения. Отверстия 230 для газообразной среды могут иметь любую подходящую форму, например, форму удлиненных прорезей, круглую, овальную, прямоугольную, квадратную и/или треугольную. Отверстия 230 для газообразной среды могут быть также покрыты сетками, экранами или другими пористыми материалами. Отверстия 230 для газообразной среды могут быть также прямолинейными или непрямолинейными, сплошными или не сплошными. В одном из воплощений первый элемент перемещения может иметь поверхность перемещения, имеющую первую структуру отверстий для газообразной среды, а второй элемент перемещения может иметь поверхность перемещения, имеющую вторую структуру отверстий для газообразной среды. В других воплощениях структуры отверстий для газообразной среды на всех поверхностях перемещения 136 могут быть одинаковыми. К отверстиям 230 для газообразной среды через различные коллекторы и трубопроводы может быть приложено положительное давление или отрицательное давление (вакуум) газообразной среды. К некоторым из отверстий 230 для газообразной среды в определенные моменты времени может быть не приложено никакого давления газообразной среды. Давление газообразной среды может вырабатываться на одном или более источников или устройств 232, 234 подачи газообразной среды, например, на одном или более компрессоров, вакуум-насосов, дутьевых устройств или вентиляторов. Газообразной средой может быть, например, воздух или другой газ. Некоторые из отверстий 230 для газообразной среды могут создавать положительное давление, и в это же время другие отверстия 230 для газообразной среды того же самого элемента 112 перемещения могут обеспечивать отрицательное давление или могут не создавать давления газообразной среды. В некоторых воплощениях некоторые из отверстий 230 для газообразной среды могут создавать первое давление газообразной среды (положительное или отрицательное), и в то же самое время другие отверстия 230 для газообразной среды того же самого элемента 112 перемещения могут создавать второе давление газообразной среды (положительное или отрицательное). Первое давление газообразной среды может быть больше или меньше, чем второе давление газообразной среды. В других воплощениях отверстия 230 для газообразной среды в одном элементе 112 перемещения могут создавать давление газообразной среды, отличное от давления, создаваемого отверстиями 230 для газообразной среды в другом элементе 112 перемещения той же системы 100 перемещения, что может обеспечиваться за счет таких факторов, как число отверстий 230 для газообразной среды или их площадь на той ли иной поверхности 136 перемещения. Так, например, в зоне подхвата может создаваться одно давление газообразной среды, а в зоне сброса может создаваться другое давление газообразной среды. В некоторых воплощениях давление газообразной среды, создаваемое в отверстиях 230 для газообразной среды, может быть различным в различных отверстиях или различных зонах отверстий 230 для газообразной среды элемента 112 перемещения в зоне подхвата и зоне сброса.
Как показано на фиг. 1 и 4-9, система с использованием газообразной среды, применяемая для создания давления газообразной среды в отверстиях 230 для газообразной среды, может содержать первое устройство 232 подачи газообразной среды и второе устройство 234 подачи газообразной среды. Первое и второе устройства 232 и 234 подачи газообразной среды могут подавать газообразную среду в первый и второй трубопроводы 236 и 238 газообразной среды под положительным и/или отрицательным давлением. В одном из воплощений первое и второе устройства 232 и 234 подачи газообразной среды могут иметь независимое или совместное управление, в зависимости от потребностей приложения. В одном из воплощений может использоваться только одно устройство подачи газообразной среды. Такое единственное устройство подачи газообразной среды может иметь конфигурацию, обеспечивающую подачу газообразной среды в первый и второй трубопроводы 236 и 238 газообразной среды как под положительным, так и под отрицательным давлением. Давление и расход газообразной среды в первом и втором трубопроводах 236 и 238 могут быть одинаковыми или различными. В одном из воплощений единое устройство подачи газообразной среды может, например, создавать положительное давление в первом трубопроводе 236 и отрицательное давление во втором трубопроводе 238 газообразной среды.
Как показано на фиг. 1, 4-6, 9 и 21-23, первый и второй трубопроводы 236 и 238 газообразной среды могут быть протяженными от первого и второго устройств 232 и 234 подачи газообразной среды (или от одного устройства подачи газообразной среды) к приемному коллектору 240 системы 100 перемещения, и могут находиться в зацеплении с частью диска 139 распределения газообразной среды без возможности вращения. Диск 139 распределения газообразной среды может быть прикреплен к колесу 138 или выполнен за единое целое с ним, и вращается вместе с колесом 138 вокруг первой оси 132 вращения. Приемный коллектор 240 газообразной среды показан полностью на фиг. 1, 4 и 9, а на фиг. 21 показан в разрезе. На фиг. 22 показаны отдельные части приемного коллектора 240 газообразной среды и магистрали 236 и 238 газообразной среды с отрезанными для наглядности частями, а на фиг. 23 показаны приемный коллектор 240 газообразной среды полностью и магистрали 236 и 238 газообразной среды с отрезанными частями, для более наглядного отображения подробностей конструкции диска 139 распределения газообразной среды. Приемный коллектор 240 газообразной среды находится в плотном контакте с частью диска 139 распределения газообразной среды, благодаря чему осуществляется подача газообразной среды к требуемым частям диска 139 распределения газообразной среды. Приемный коллектор 240 газообразной среды и/или часть диска 139 распределения газообразной среды могут содержать материал, обеспечивающий уплотнение, то есть не пропускающий газообразную среду между обращенными друг к другу частями приемного коллектора 240 газообразной среды и частью диска 139 распределения газообразной среды, при этом позволяя диску 139 распределения газообразной среды вращаться относительно неподвижного приемного коллектора 240 газообразной среды. Иными словами, диск 139 распределения газообразной среды может вращаться относительно поверхности приемного коллектора 240 газообразной среды, и при этом давление газообразной среды будет передаваться к требуемым частям диска 139 распределения газообразной среды. В одном из воплощений такой материал может содержать материал, обеспечивающий малое трение и устойчивый к износу, например, материал POLYSLICK UHMW®, TEFLON®, DELRIN® или GARLOCK®. Первая и вторая магистрали 236 и 238 газообразной среды могут быть присоединены к отверстиям или разъемам на приемном коллекторе 240 газообразной среды. Как показано на фиг. 23, в определенные области 249 приемного коллектора 240 газообразной среды может подаваться положительное давление, например, для очистки отверстий в поверхностях 136 перемещения.
Как показано на фиг. 21, приемный коллектор 240 газообразной среды может содержать выполненные в нем первое отверстие 242 и второе отверстие 244. Первое отверстие 242 может быть связано по газообразной среде с первой магистралью 236 и тем самым с первым устройством 232 подачи газообразной среды. Подобным образом, второе отверстие 244 может быть связано по газообразной среде со второй магистралью 238 газообразной среды и тем самым, со вторым устройством 234 подачи газообразной среды. При такой конструкции первое устройство 232 подачи газообразной среды может обеспечивать подачу газообразной среды к первому отверстию 242, а второе устройство 234 подачи газообразной среды может обеспечивать подачу газообразной среды ко второму отверстию 244. В одном из воплощений первое устройство 232 подачи газообразной среды может подавать газообразную среду к первому отверстию 242 и второму отверстию 244 (например, с отрицательным давлением), и подобным образом, второе устройство 234 подачи газообразной среды может подавать газообразную среду к первому отверстию 242 и второму отверстию 244 (например, с отрицательным давлением). Как показано на фиг. 22 и 23, диск 139 распределения газообразной среды может содержать первый канал, содержащий первую часть 246 и вторую часть 248. Первый канал может быть связан по газообразной среде с первым отверстием 242 и первой магистралью 236 газообразной среды. Первая часть 246 может использоваться для создания отрицательного давления газообразной среды по меньшей мере в некоторых отверстиях 230 для газообразной среды, а вторая часть 248 может использоваться для создания положительного давления газообразной среды по меньшей мере в некоторых отверстиях 230 для газообразной среды. Создание положительного давления газообразной среды по меньшей мере в некоторых отверстиях 230 может использоваться для так называемого «сдувания» дискретных изделий 102. Сдувание может требоваться, например, при переносе дискретных изделий 102 на второй движущийся несущий элемент 106. Положительное давление может быть приложено ко второй части 248 от источника сжатого воздуха или иного устройства подачи газообразной среды (не показано). В различных приложениях любая из частей: первая часть 246 или вторая часть 248 - может использоваться для подачи газообразной среды с положительным и/или отрицательным давлением по меньшей мере к некоторым из отверстий 230 для газообразной среды.
Как показано на фиг. 22 и 23, диск 139 распределения газообразной среды может содержать второй канал, содержащий первую часть 250 и вторую часть 252. Второй канал может быть связан по газообразной среде со вторым отверстием 244 в диске 139 распределения газообразной среды и со второй магистралью 238. газообразной среды. Первая часть 250 может использоваться для создания отрицательного давления газообразной среды по меньшей мере в некоторых отверстиях 230 для газообразной среды, а вторая часть 252 может использоваться для создания положительного давления газообразной среды по меньшей мере в некоторых отверстиях 230 для газообразной среды. Положительное давление может быть приложено ко второй части 252 от источника сжатого воздуха или иного устройства подачи газообразной среды через соединитель 253. В различных приложениях любая из частей: первая часть 250 или вторая часть 252 - может использоваться для подачи газообразной среды с положительным и/или отрицательным давлением по меньшей мере к некоторым из отверстий 230 для газообразной среды. Второй канал может быть расположен ближе к оси 132 вращения, чем первый канал. Иными словами, второй канал, или по меньшей мере его части могут быть окружены первым каналом или по меньшей мере его частями. В одном из воплощений первый канал, включая его первую и вторую части 246 и 248, имеет форму дуги окружности с центром на оси 132 вращения. Второй канал и его первая и вторая части 250 и 252 выполнены в виде концентричных дуг окружности меньшего радиуса. Первый канал и его первая и вторая части 246 и 248 в неподвижном приемном коллекторе 240 газообразной среды могут быть связаны по газообразной среде с распределительными отверстиями 247 во вращающемся диске 139 распределения газообразной среды. Второй канал и его первая и вторая части 250 и 252 в неподвижном приемном коллекторе 240 газообразной среды могут быть связаны по газообразной среде с распределительными отверстиями 251 во вращающемся диске 139 распределения газообразной среды.
В одном из воплощений распределительные отверстия 247 в диске 139 распределения газообразной среды могут быть связаны по газообразной среде с одним или более первыми трубопроводами 254 газообразной среды, протяженными между распределительными отверстиями 247 и отверстием 255 в одном или более коллекторов 256 газообразной среды. Каждый из коллекторов 256 газообразной среды может быть связан по газообразной среде с отверстиями 230 для газообразной среды в элементах 112 перемещения. Коллекторы 256 газообразной среды могут быть установлены на основания 141, или выполнены за единое целое с основаниями 141, которые в свою очередь могут быть установлены на плиты 155 с возможностью сдвига или иного перемещения (смотри, например, фиг. 10 и 16-18) таким образом, что коллекторы 256 газообразной среды и основания 141 могут сдвигаться или смещаться на плитах 155 в радиальном направлении относительно оси 132 вращения. Коллекторы 256 газообразной среды и основания 141 могут быть частями элементов 112 перемещения. В одном из воплощений основание 141 может содержать одну или более канавок, линейных опор качения или линейных вкладышей, которые могут взаимодействовать с одним или более линейных или в сущности линейных направляющих рельсов или дорожек, имеющихся на плитах 155. В других воплощениях линейные опоры качения или линейные вкладыши могут быть выполнены в плитах 155, а рельсы могут быть выполнены в основании 141. В результате этого, при движении копирных элементов 142 в радиальном направлении по дорожке 134, коллекторы 256 газообразной среды и основания 141 также будут двигаться в радиальном направлении, скользя или смещаясь относительно плиты 155 благодаря подвижному или скользящему зацеплению между основаниями 141 и плитами 155. В одном из воплощений распределительные отверстия 251 в диске 139 распределения газообразной среды могут быть связаны по газообразной среде с одним или более вторыми трубопроводами 258 газообразной среды, протяженными между распределительными отверстиями 251 и отверстием 257 в одном или более коллекторов 256 газообразной среды. При такой конструкции газообразная среда из первой и второй магистралей 236 и 238 через приемный коллектор 240 газообразной среды, распределительные отверстия 247 и 251, и первый и второй трубопроводы 254 и 258 газообразной среды может подаваться в коллекторы 256 газообразной среды во время вращения коллекторов 256 газообразной среды вокруг первой оси 132 вращения и их движения в радиальном направлении по отношению к первой оси 132 вращения вследствие движения по дорожке 134.
Как показано на фиг. 21-25, в одном из воплощений первый и второй трубопроводы 254 и 258 газообразной среды могут допускать движение коллектора 256 газообразной среды в радиальном направлении, оставаясь в связи по газообразной среде с различными зонами. Первый и второй трубопроводы 254 и 258 газообразной среды могут быть гибкими и содержать гибкие шланги или трубки. Изогнутая форма трубопроводов 254 и 258 газообразной среды может допускать движение в радиальном направлении в полном диапазоне без изменения длины трубопроводов 254 и 258 газообразной среды. В качестве альтернативы, трубопроводы 254 и 258 газообразной среды могут быть растяжимыми, в результате чего они будут растягиваться и/или сжиматься, адаптируясь под движение в радиальном направлении. Трубопроводы 254 и 258 газообразной среды могут быть изготовлены из различных деформируемых материалов. Примеры таких материалов включают резину, винил, пластмассы и/или гофрированный металл. Внутри трубопроводов 254 и 258 газообразной среды, или на их боковых стенках могут быть установлены усиливающие элементы, такие, как, например, проволочная спираль, и они могут предотвращать сложение, или по меньшей мере препятствовать сложению трубопроводов 254 и 258 газообразной среды при создании в них вакуума в определенные моменты работы системы. В масштабах настоящего изобретения возможны также и прочие способы создания связи по газообразной среде с коллектором 256 газообразной среды, совершающим движение в радиальном направлении. Трубопроводы 254 и 258 газообразной среды могут также содержать полые трубки, совершающие движение в осевом направлении от коллектора, с которым они находятся в плотном соединении, или телескопические трубки. В одном из воплощений движущийся коллектор газообразной среды может оставаться в связи по газообразной среде за счет движения вдоль другого коллектора с боковыми каналами.
Как показано на фиг. 22 и 23, в различных воплощениях угловое положение первого и второго каналов (показаны в виде дугообразных каналов) в приемном коллекторе 240 газообразной среды может управлять моментом подачи газообразной среды под требуемым давлением к различным элементам 112 перемещения и поверхностям 136 перемещения. Фазами создания отрицательного давления газообразной среды в первом трубопроводе 254 газообразной среды, и соответственно моментами приложения вакуума к головной части поверхности 136 перемещения, можно управлять путем изменения положения разделителя 259А. При повороте разделителя 259А против часовой стрелки приложение вакуума к поверхности 136 перемещения будет запаздывать, в то время как при повороте разделителя 259А по часовой стрелки приложение вакуума к поверхности 136 перемещения будет наступать раньше. Отрицательное давление или вакуум будет сохраняться во время вращения диска 139 распределения газообразной среды от разделителя 259А до разделителя 259В, расположенных внутри первой части 246. Расположение разделителя 259В может определять время отключения отрицательного давления в первом трубопроводе 254 газообразной среды и подачи положительного давления из второй части 248. Положительное давление может сдувать головную часть дискретного изделия 102 с поверхности 136 перемещения. Подобным образом, фазами создания положительного или отрицательного давления газообразной среды во втором трубопроводе 258, и соответственно, моментами его приложения к хвостовой части поверхности 136 перемещения и расположенному на ней дискретному изделию, можно управлять путем изменения положения разделителей 259С и 259D. Наличие таких элементов позволяет производить независимую регулировку моментов времени приложения положительного или отрицательного давления в различных частях (например, головной и хвостовой частях) элементов 112 перемещения и поверхностей 136 перемещения.
На фиг. 24-26 показаны некоторые части узла 170 вращения и части элемента 112 перемещения, а именно, компоненты, связанные с прохождением газообразной среды через элемент 112 перемещения, в соответствии с одним из воплощений настоящего изобретения. На фиг. 24 показаны некоторые части узла 170 вращения и элемента 112 перемещения с первым и вторым трубопроводами 254 и 258 газообразной среды, прикрепленными к патрубкам 255 и 257, в то время как на фиг. 26 показаны те же фрагменты узла 170 вращения и элемента 112 перемещения, но первый и второй трубопроводы 254 и 258 газообразной среды для наглядности сняты с патрубков 255 и 257. На фиг. 24 поверхность 136 перемещения и остальные части элемента 112 перемещения находятся в первом положении 116, в то время как на фиг. 25 и 26 поверхности 136 перемещения и остальные части элемента 112 перемещения находятся во втором положении 118. На фиг. 26 показана дорожка на плите 155, в зацеплении с которой находится основание 114 с возможностью скольжения или иного перемещения.
На фиг. 27-29 показаны аксонометрические виды коллектора 256 газообразной среды снизу и с разрезом, в одном из воплощений настоящего изобретения. На фиг. 27 и 28 поверхность 136 перемещения и прочие части элемента 112 перемещения находятся в первом положении 116, в то время как на фиг. 29 поверхность 136 перемещения и прочие части элемента 112 перемещения находятся в первом положении 118. Коллектор 256 газообразной среды может иметь конфигурацию, обеспечивающую прохождение вала 200 или шлицов 206 через его центральную часть 262. Под действием вала 200 или шлицов 206 центральная часть 262 может вращаться как в направлении по часовой стрелке, так и в направлении против часовой стрелки. Центральная часть 262 может быть окружена рамой 260, которая может иметь первую стенку 264, протяженную в первом направлении, и вторую стенку 266, протяженную во втором направлении. В одном из воплощений первая стенка 264 может быть протяженной в направлении, противоположном или в целом противоположном направлению протяженности второй стенки 266. Стенки 264 и 266 и рама 260 могут иметь конфигурацию, обеспечивающую отделение потока газообразной среды из первого трубопровода 254 газообразной среды от потока газообразной среды из второго трубопровода 258 газообразной среды. Следует отметить, что коллектор 256 газообразной среды, рама 260, а также первый и второй трубопроводы 254 и 258 газообразной среды могут не вращаться или не вращаются во время вращения частей элемента 112 перемещения между первым положением 116 и вторым положением 118, но центральная часть 262, корпус 278 и плита 268 могут вращаться с валом 200 или шлицами 206. Корпус 278 может быть прикреплен к плите 268 или выполнен за единое целое с плитой 268, в которой выполнено четыре или более отверстий: первое отверстие 270, второе отверстие 272, третье отверстие 274 и четвертое отверстие 276. Отверстия могут иметь любую подходящую форму и/или площадь, и любые из отверстий могут иметь форму и/или площадь, отличные от формы и/или площади остальных отверстий. В одном из воплощений все отверстия могут иметь одинаковую форму и/или площадь. Когда элемент 112 перемещения находится в первом положении 116, первый трубопровод 254 газообразной среды может быть связан по газообразной среде с первым отверстием 270 и вторым отверстием 272 плиты 268, а второй трубопровод 258 газообразной среды может быть связан по газообразной среде со третьим отверстием 274 и четвертым отверстием 276. Когда элемент 112 перемещения находится во втором положении 118, первый трубопровод 254 газообразной среды может быть связан по газообразной среде с первым отверстием 270 и третьим отверстием 274 плиты 268, а второй трубопровод 258 газообразной среды может быть связан по газообразной среде со вторым отверстием 272 и четвертым отверстием 276.
Как показано на фиг. 24-32, в одном из воплощений элемент 112 перемещения может содержать корпус 278. В одном из воплощений корпус 278 может содержать фланец 279, расположенный на части корпуса 278, наиболее близкой к нижней поверхности элемента 112 перемещения. Данный фланец 279 может быть прикреплен к дистальной части элемента 112 перемещения болтами, проходящими через отверстия 228 под болты, в результате чего осуществляется крепление дистальной части элемента 112 перемещения к корпусу 278. Могут также использоваться и другие крепежные детали. В одном из воплощений корпус 278 может быть плотно прикреплен к дистальной части элемента 112 перемещения за счет установки уплотнительного элемента между дистальной частью элемента 112 перемещения и фланцем 279. Корпус 278 может быть также выполнен за единое целое с дистальной частью элемента 112 перемещения. Конфигурация корпуса 278 может также обеспечивать поддержание в нем одного или более значений давления газообразной среды, и для этого может иметь камеру 280 с расположенным в ней разделителем 282. Разделитель 282 может быть установлен в камеру 280, или может быть выполнен за единое целое с корпусом 278. Корпус 278 может находиться в плотном зацеплении с коллектором 256 газообразной среды за счет наличия уплотнений 278, или прочих элементов или компонентов, благодаря которым газообразная среда может без утечек подаваться из коллектора 256 газообразной среды в корпус 278. Газообразная среда может подаваться из коллектора 256 газообразной среды в корпус 278 на границе соприкосновения между плитой 268 и рамой 260. Плотный контакт между плитой 268 и рамой 260, или наличие минимального зазора, обеспечивает минимум утечек газообразной среды. Разделитель 282 может разделять камеру 280 на четыре или более зон. Каждая из четырех или более зон камеры 280 может быть связана по газообразной среде по меньшей мере с одной зоной дистальной части элемента 112 перемещения, и соответственно с отверстиями 230 для газообразной среды в поверхности 136 перемещения. Зоны дистальной части элемента 112 перемещения будут более подробно описаны ниже. Корпус 278, разделитель 282 и дистальная часть элемента 112 перемещения могут вращаться синхронно при вращении частей элемента 112 перемещения между первым положением 116 и вторым положением 118. Вал 200 или шлицы 206 могут находиться в зацеплении с разделителем 282, который в свою очередь может быть прикреплен к корпусу 278 и дистальной части элемента 112 перемещения, или выполнен за единое целое с ними, в результате чего весь данный узел может вращаться между первым положением 116 и вторым положением 118. Корпус 278, разделитель 282 плита 268 и дистальная часть элемента 112 перемещения могут в совокупности вращаться относительно коллектора 256 газообразной среды и рамы 260. Плита 268 может быть расположена поблизости к разделителю 282, или разделитель 282 может быть расположен встык к плите 268. В одном из воплощений разделитель 282 находится в плотном зацеплении с плитой 268, например, посредством уплотнительного или другого подходящего элемента.
В существующих системах с использованием газообразной среды ее давление, как правило, одновременно включается или выключается в хвостовой и головной частях. При этом если одновременно прилагать давление как в головной части, так и хвостовой части, когда это не нужно, это может приводить к лишним потерям энергии. Кроме того, в применяемых элементах перемещения давление газообразной среды в головной части и хвостовой части одновременно либо положительное, либо отрицательное, но как правило, не может быть положительным в одной части и отрицательным во второй части. Это может вызывать проблемы при перемещении дискретных изделий, особенно при переносе дискретного изделия на второй движущийся несущий элемент. Как правило, дискретное изделие «сдувают» с элемента перемещения на второй движущийся несущий элемент. Чтобы обеспечить более-менее точный перенос изделия, сдувать его начинают, когда головная часть дискретного изделия вошла в зацепление со вторым движущимся несущим элементом. При этом элемент перемещения сдувает также и хвостовую часть дискретного изделия, в результате чего на некоторое время теряется управляемость движения данной части дискретного изделия, вплоть до того момента, пока хвостовая часть не ляжет на второй движущийся несущий элемент. Это может привести к сложению частей дискретных изделий во время их переноса, или к неправильному переносу дискретных изделий на второй движущийся несущий элемент, например, к их укладке на второй движущийся несущий элемент в неправильном положении. Данная проблема может проявляться особенно остро, если дискретные изделия имеют растяжимые эластичные элементы, которые могут сократиться, если не будет сохраняться отрицательное давление вплоть до конечного момента их переноса. Системы с использованием газообразной среды в соответствии с настоящим изобретением позволяют преодолеть недостатки, присущие аналогичным системам перемещения с использованием газообразной среды в соответствии с существующим уровнем техники.
В системах с использованием газообразной среды, имеющих конструкцию в соответствии с настоящим изобретением, давление газообразной среды, поступающей из первого трубопровода 254 газообразной среды, может поддерживаться в головной части дистальной части элемента 112 перемещения независимо от того, находится ли дистальная часть элемента 112 перемещения в первом положении 116 или во втором положении 118. Подобным образом, давление газообразной среды, поступающей из второго трубопровода 254 газообразной среды, может поддерживаться в хвостовой части дистальной части элемента 112 перемещения независимо от того, находится ли дистальная часть элемента 112 перемещения в первом положении 116 или во втором положении 118. Это обеспечивает значительные преимущества по сравнению с существующими системами, поскольку обеспечивается возможность независимого управления головной и хвостовой частями дискретного изделия 102, независимо от того, находятся ли дистальные части элементов 112 перемещения в первом положении 116 или во втором положении 118, благодаря чему обеспечивается более точное и высокоскоростное перемещение дискретных изделий. В одном из воплощений первый трубопровод 254 газообразной среды может быть связан по газообразной среде с головной частью дистальной части элемента 112 перемещения, а второй трубопровод 258 газообразной среды может быть связан по газообразной среде с хвостовой частью дистальной части элемента 112 перемещения. В контексте настоящего описания дистальная часть элемента перемещения является «головкой», содержащей поверхность 136 перемещения и ее зоны. Она расположена в области элемент 112 перемещения, самой удаленной по отношению к оси 132 вращения.
Кроме того, конструкция систем перемещения с использованием газообразной среды в соответствии с настоящим изобретением позволяет использовать меньшее разрежение или меньшее давление для удержания дискретных изделий на поверхностях перемещения 136, поскольку в головных или хвостовых частях элементов 112 перемещения вакуум может быть отключен, как только необходимость в нем пропадает. Так, например, как только головная часть поверхности 136 перемещения вошла в зацепление с дискретным изделием, подхваченным с первого движущегося несущего элемента, вакуум в хвостовой части может быть отключен до тех пор, пока в нем не появится необходимость. Подобным образом, как только головная часть дискретного изделия перенесена на второй движущийся несущий элемент, вакуум в головной части поверхности 136 перемещения может быть отключен. Это помогает экономить энергию.
Как показано на фиг. 33-36, одна или более из дистальных частей элементов 112 перемещения может содержать первую зону "1", вторую зону "2", третью зону "3", четвертую зону "4", или даже большее количество зон. И хотя поверхность 136 перемещения на фиг. 33-36 не показана, каждая из зон может содержать отверстия 230 для газообразной среды, выполненные по всей поверхности 136 перемещения (смотри, например, фиг. 8). Зоны могут быть связаны по газообразной среде с отверстиями 230 для газообразной среды в пределах данной зоны. В одном из воплощений поверхности 136 перемещения могут быть плотно прикреплены к соответствующим частям дистальной части элемента 112 перемещения, образующим соответствующие зоны, в результате чего газообразная среда может поступать к отверстиям 230 для газообразной среды и через данные отверстия, в пределах данной зоны. В одном из воплощений, как это было описано выше, поверхности 136 перемещения могут быть плоскими, или в сущности плоскими, или могут содержать плоские или дугообразного профиля части. На фиг. 33-36 показаны дистальные части элементов 112 перемещения в первом положении 116. Стрелками Е и F показаны два возможных направления вращения дистальных частей элементов 112 перемещения во второе положение 118 вокруг вала 200, шлицов 206 и/или второй оси 164 вращения. Примеры нумерации зон показаны на фиг. 33-36. Во всех случаях зона 1 расположена диагонально по отношению к зоне 4, а зона 2 расположена диагонально по отношению к зоне 3. Головные части и хвостовые части по отношению к направлению вращения вокруг оси 132 вращения обозначены "L" и "Т" соответственно. Заметим, что для всех воплощений, изображенных на фиг. 3-32, предпочтительная схема нумерации зон на поверхности 136 перемещения показана на фиг. 33, а Е является предпочтительным направлением вращения из первого положения 116 во второе положение 118.
Опять же, как показано на фиг. 33-36, первый трубопровод 254 газообразной среды может быть связан по газообразной среде с головной частью L, а второй трубопровод 258 газообразной среды может быть связан по газообразной среде с хвостовой частью Т дистальных частей элементов 112 перемещения, независимо от того, вращаются ли дистальные части элементов 112 перемещения в направлении стрелки Е или в направлении стрелки F. Так, давление газообразной среды из первого трубопровода 254 газообразной среды может быть приложено к головной части L, а давление газообразной среды из второго трубопровода 258 газообразной среды может быть приложено к хвостовой части Т, когда элементы 112 перемещения находятся как в первом положении 116, так и во втором положении 118. Это происходит потому, что корпус 278, разделитель 282 и плита 268 синхронно вращаются вместе с дистальной частью элемента 112 перемещения между первым положением 116 и вторым положением 118, и рама 260 остается в фиксированном положении относительно дистальной части элемента 112 перемещения (то есть, между ними нет взаимного вращения). Благодаря такой конструкции системы дискретное изделие 102 может получать различное давление газообразной среды в головной и хвостовой частях даже после поворота дистальной части элемента 112 перемещения вокруг второй оси 164 вращения. В таком воплощении вторая ось 164 вращения может быть, например, соосна со шлицами 206. На фиг. 37 показана дистальная часть элемента 112 перемещения, изображенного на фиг. 36, перешедшего во второе положение 118 в направлении стрелки Е.
В одном из воплощений осуществляется независимое управление приложением вакуума к головной части и хвостовой части, когда элементы 112 перемещения находятся в первом положении 116 или во втором положении 118. Такое независимое управление приложением давления к головной части и хвостовой части в моменты переноса изделий может давать определенные преимущества. При этом во время вращения элемента 112 перемещения между первым положением 116 и вторым положением 118 может происходить некоторое «смешение» отрицательных давлений друг с другом, однако это не является проблемой, поскольку отрицательное давление может быть приложено как к головной части, так и к хвостовой части, для лучшей управляемости переноса дискретного изделия 102.
На фиг. 36 показан пример нумерации зон в одном из воплощений настоящего изобретения, хотя описанный ниже принцип может относиться и к нумерации зон в любых других воплощениях. Так, одна из дистальных частей, или каждая из дистальных частей элементов 112 перемещения может иметь проходящую через нее ось X и проходящую через нее ось Y. В одном из воплощений обе оси X и Y могут проходить через среднюю точку 286 поверхностей 136 перемещения. Ось X может быть расположена перпендикулярно оси Y. Четыре зоны 1-4 могут представлять собой четыре квадранта, образуемые осями X и Y. Любая точка в первом квадранте (зона 1) может иметь первый знак декартовой координаты X и первый знак декартовой координаты Y. Точка в четвертом квадранте (зона 4) может иметь второй знак декартовой координаты X и второй знак декартовой координаты Y. Первый знак декартовой координаты X может быть противоположным второму знаку декартовой координаты X, а первый знак декартовой координаты Y может быть противоположным второму знаку декартовой координаты Y. В одном из воплощений точка во втором квадранте (зона 2) может иметь первый знак декартовой координаты X и первый знак декартовой координаты Y, а точка в третьем квадранте (зона 3) может иметь второй знак декартовой координаты X и второй знак декартовой координаты Y. При этом первый знак декартовой координаты X может быть противоположным второму знаку декартовой координаты X, а первый знак декартовой координаты Y может быть противоположным второму знаку декартовой координаты Y. Знак декартовой координаты X в третьем квадранте (третьей зоне) может быть противоположным знаку декартовой координаты X в четвертом квадранте (четвертой зоне), в то время как знак декартовой координаты Y в третьем квадранте может совпадать со знаком декартовой координаты Y в четвертом квадранте. Знак декартовой координаты X в первом квадранте (первой зоне) может быть противоположным знаку декартовой координаты X во втором квадранте (второй зоне), в то время как знак декартовой координаты Y в первом квадранте может совпадать со знаком декартовой координаты Y во втором квадранте.
Как показано на фиг. 33 и 34, дистальная часть элемента 112 перемещения может содержать первую зону 1, вторую зону 2, третью зону 3 и четвертую зону 4. Каждая из данных четырех зон может содержать отверстия 230 для газообразной среды, проходящие через поверхность 136 перемещения. Первый трубопровод 254 газообразной среды может быть связан по газообразной среде с первой зоной 1 и второй зоной 2, когда дистальная часть элемента 112 перемещения находится в первом положении 116, и может быть связан по газообразной среде с первой зоной 1 и третьей зоной 3, когда дистальная часть элемента 112 перемещения повернута во второе положение 118 в направлении стрелки Е на фиг. 33 и в направлении стрелки F на фиг. 34. Второй трубопровод 258 газообразной среды может быть связан по газообразной среде с третьей зоной 3 и четвертой зоной 4, когда дистальная часть элемента 112 перемещения находится в первом положении 116, и может быть связан по газообразной среде с четвертой зоной 4 и второй зоной 2, когда дистальная часть элемента 112 перемещения повернута во второе положение 118 в направлении стрелки Е на фиг. 33 и в направлении стрелки F на фиг. 34.
В контексте масштаба настоящего изобретения и настоящего абзаца первый трубопровод 254 газообразной среды может также считаться вторым трубопроводом газообразной среды, а второй трубопровод 258 газообразной среды может считаться первым трубопроводом газообразной среды. Трубопроводы газообразной среды в настоящем описании именуются «первым» и «вторым» только для наглядности и большей ясности описания, и не подразумевается, что данная нумерация ограничивает масштаб настоящего изобретения. Каждый из трубопроводов газообразной среды может быть связан по газообразной среде с одним из устройств подачи газообразной среды: первым или вторым. Как показано на фиг. 35 и 36, в одном из таких воплощений дистальная часть элемента 112 перемещения может содержать первую зону 1, вторую зону 2, третью зону 3 и четвертую зону 4. Первый трубопровод 258 газообразной среды может быть связан по газообразной среде с первой зоной 1 и второй зоной 2, когда дистальная часть элемента 112 перемещения находится в первом положении 116, и может быть связан по газообразной среде с первой зоной 1 и третьей зоной 3, когда дистальная часть элемента 112 перемещения повернута во второе положение 118 в направлении стрелки F на фиг. 35 и в направлении стрелки Е на фиг. 36. Второй трубопровод 254 газообразной среды может быть связан по газообразной среде с третьей зоной 3 и четвертой зоной 4, когда дистальная часть элемента 112 перемещения находится в первом положении 116, и может быть связан по газообразной среде с четвертой зоной 4 и второй зоной 2, когда дистальная часть элемента 112 перемещения повернута во второе положение 118 в направлении стрелки F на фиг. 35 и в направлении стрелки Е на фиг. 36. Поверхность 136 перемещения может быть повернута на угол от примерно 70° до примерно 110°, от примерно 80° до примерно 100°, примерно 90° (например, ±3°), или 90°, а также на любой угол с шагом в один градус, находящийся в пределах указанных диапазонов, при повороте дистальной части элемента 112 перемещения между первым положением 116 и вторым положением 118 вокруг второй оси 164 вращения.
В одном из воплощений, опять же, показанном на фиг. 33-36, дистальная часть одного или каждого из элементов 112 перемещения может содержать первую зону 1, вторую зону 2, третью зону 3 и четвертую зону 4, или даже больше, чем четыре зоны, например, пять, шесть, семь, восемь, девять или шестнадцать зон. Примером пятизонной системы является система, содержащая зону дополнительных отверстий для газообразной среды вдоль головного края поверхности 136 перемещения, благодаря чему при переходе поверхности 136 перемещения во второе положение 118 головной край дискретного изделия может сдуваться в немного другое время, например, немного раньше, чем сдувается головная часть дискретного изделия (то есть половина дискретного изделия, управляемая еще двумя зонами). Каждая из зон может содержать отверстия 230 для газообразной среды, выполненные в поверхности 136 перемещения. Зоны могут быть связаны по газообразной среде с отверстиями 230 для газообразной среды. Первая зона 1 и вторая зона 2 могут образовывать по меньшей мере частично, или даже полностью, хвостовую часть Т или головную часть L дистальной части одного из элементов 112 перемещения или всех элементов 112 перемещения в первом их положении 116. Первая зона 1 или вторая зона 2, и третья зона 3 или четвертая зона 4 (например, первая зона 1 или третья зона 3) могут по меньшей мере частично или даже полностью образовывать ту же саму часть (хвостовую Т или головную L) дистальной части одного или всех элементов 112 перемещения, когда соответствующие элементы 112 перемещения повернуты во второе положение 118 в направлении стрелок Е или F. Трубопровод 254 или 258 может быть связан по газообразной среде с первой зоной 1 и второй зоной 2, когда дистальная часть одного или каждого из элементов 112 перемещения находится в первом положении 116, и с первой зоной 1 или второй зоной 2, и третьей зоной 3 или четвертой зоной 4, когда соответствующие элементы 112 перемещения повернуты во второе положение 118 в направлении стрелок Е или F. Второй трубопровод 254 или 258 может быть связан по газообразной среде с третьей зоной 3 и четвертой зоной 4, когда дистальная часть одного или каждого из элементов 112 перемещения находится в первом положении 116, и с другой из зон - первой зоной 1 или второй зоной 2, и другой из зон - третьей зоной 3 или четвертой зоной 4 (например, со второй зоной 2 и четвертой зоной 4), когда соответствующие элементы 112 перемещения повернуты во второе положение 118 в направлении стрелок Е или F.
Несмотря на то, что в качестве примера предлагаемая система с использованием газообразной среды изображена, как используемая в сочетании с системой 100 перемещения и узлом 170 вращения, на самом деле предлагаемая система с использованием газообразной среды может использоваться и с другими системами перемещения и другими узлами вращения, известными сведущим в данной области техники или которые будут разработаны в будущем, и может функционировать независимо от конкретной системы 100 перемещения и конкретного узла 170 вращения. Сведущим в данной области техники будет понятно, как следует адаптировать предлагаемую систему с использованием газообразной среды для работы с другими системами перемещения или узлами вращения. В одном из воплощений другие системы перемещения и узлы вращения, с которыми может использоваться предлагаемая система с использованием газообразной среды, могут, например, не иметь элементов перемещения, совершающих движение в радиальном направлении относительно их оси вращения.
В одном из воплощений предлагается способ приложения давления газообразной среды к части элемента перемещения системы перемещения. В результате этого давление газообразной среды прилагается к дискретным изделиям, перемещаемым элементами перемещения системы перемещения. Система перемещения может содержать раму, образующую первую ось вращения, и один или более элементов перемещения. Части каждого из элементов перемещения могут содержать головную часть и хвостовую часть при вращении вокруг первой оси вращения. Части каждого из упомянутых одного или более элементов перемещения могут быть также выполнены с возможностью вращения вокруг второй оси вращения между первым положением и вторым положением во время вращения вокруг первой оси вращения. Способ может содержать этапы обеспечения трубопровода газообразной среды, связанного по газообразной среде с головной частью или хвостовой частью упомянутых одного или каждого из элементов перемещения, когда части элементов перемещения находятся в первом положении, вращения частей элемента перемещения между первым положением и по меньшей мере вторым положением вокруг второй оси вращения, и сохранения связи трубопровода газообразной среды с той же самой частью - хвостовой частью или головной частью -из частей упомянутых одного или каждого из элементов перемещения после перехода частей упомянутых одного или каждого из элементов перемещения во второе положение. Способ может также содержать этап обеспечения второго трубопровода газообразной среды, связанного по газообразной среде со второй из частей - головной частью или хвостовой частью - из частей упомянутых одного или каждого из элементов перемещения (например, если первый трубопровод газообразной среды связан по газообразной среде с хвостовой частью, то второй трубопровод газообразной среды связан с хвостовой частью), когда части упомянутых одного или каждого из элементов перемещения находятся в первом положении, и сохранения связи второго трубопровода по газообразной среде с той же самой частью - головной частью или хвостовой частью из частей упомянутых одного или каждого из элементов перемещения после того, как части упомянутых одного или более элементов перемещения были переведены во второе положение. Способ может также содержать этап независимого (или селективного управления) подачей газообразной среды через первый трубопровод газообразной среды и через второй трубопровод газообразной среды. В первом трубопроводе газообразной среды и втором трубопроводе газообразной среды может быть создано различное давление газообразной среды, например, в первом трубопроводе газообразной среды может быть создано положительное давление газообразной среды, а во втором трубопроводе может быть создано отрицательное давление газообразной среды. Положительное и отрицательное давление может быть приложено к частям каждого или одного из элементов перемещения одновременно. В других воплощениях различными давлениями газообразной среды могут быть первое отрицательное давление в первом трубопроводе газообразной среды и второе отрицательное давление во втором трубопроводе газообразной среды, отличное от первого отрицательного давления. Одним из двух различных давлений газообразной среды может быть нулевое давление. В одном из воплощений давления в каждом из трубопроводов газообразной среды могут быть настроены независимо друг от друга. Одно или более устройств подачи газообразной среды могут быть связаны с первым трубопроводом газообразной среды и вторым трубопроводом газообразной среды. Способ может также содержать изменение шага дискретных изделий, расположенных на поверхности перемещения частей каждого или одного из элементов перемещения между точкой или зоной подхвата (например, первым движущимся несущим элементом) и точкой или зоной сброса (например, вторым движущимся несущим элементом).
Ниже будут более подробно описаны способы переноса дискретных изделий с движущегося несущего элемента или на движущийся несущий элемент, или с первого движущегося несущего элемента на второй движущийся несущий элемент в соответствии с различными воплощениями настоящего изобретения. В качестве примера такого способа подразумевается способ, в котором используются система перемещения, узел вращения и система на основе газообразной среды в соответствии с настоящим изобретением, однако следует понимать, что в описании способа ссылки на предлагаемые систему перемещения, узел вращения и систему на основе газообразной среды даются только лишь для примера. То есть, прочие системы перемещения, узлы вращения и системы с использованием газовой среды также входят в масштаб настоящего изобретения. И кроме того, при реализации предлагаемого способа некоторые элементы или компоненты системы перемещения, узла вращения и систем с использованием газообразной среды, описанные выше, могут не требоваться и/или могут быть заменены на другие элементы или компоненты.
В одном из воплощений предлагается способ переноса дискретных изделий с движущегося несущего элемента или на движущийся несущий элемент. В способе может использоваться система перемещения, содержащая раму, определяющую ось вращения, и один или более элементов перемещения, каждый из которых содержит плоскую или в сущности плоскую поверхность перемещения. В других воплощениях поверхность перемещения может содержать плоские части и иные, например, имеющие дугообразный или иной профиль части. Каждая из поверхностей перемещения может иметь конфигурацию, обеспечивающую прием одного или более дискретных изделий. Способ может содержать этапы вращения упомянутых одного или более элементов перемещения вокруг оси вращения и поддержания постоянного или в сущности постоянного расстояния, или минимального расстояния между поверхностями перемещения и движущимся несущим элементом в точке переноса дискретного изделия, или в непосредственной близости к такой точке переноса. Способ может дополнительно содержать этапы движения поверхности перемещения в радиальном направлении вовнутрь и в радиальном направлении наружу по отношению к оси вращения в точке переноса дискретного изделия, или в непосредственной близости к такой точке переноса, и обеспечения тангенциальной составляющей скорости поверхности перемещения, равной или в сущности равной скорости движущегося несущего элемента в точке переноса дискретного изделия, или в непосредственной близости к такой точке переноса. Во время вращения элемента перемещения вокруг оси вращения поверхность перемещения и другие части элемента перемещения могут поворачиваться вокруг второй оси вращения между первым положением и по меньшей мере вторым положением. Вторая ось вращения может быть расположена поперек, перпендикулярно или в сущности перпендикулярно оси вращения. В других воплощениях ось вращения может быть протяженной в первом направлении, а вторая ось вращения может быть протяженной во втором направлении, отличном от первого направления. В одном из воплощений поверхность перемещения имеет продольную ось или иную ось, проходящую через ее центральную точку, и данная ось может поворачиваться на угол от 45° до 180°, от 80° до 100°, или 90°, или на любой угол с шагом 0,5° между указанными диапазонами, между первым положением и вторым положением вокруг второй оси вращения. В одном из воплощений поверхность перемещения может поворачиваться в первом направлении вращения из первого положения во второе положение, и во втором направлении вращения из второго положения в первое положение. Первое направление вращения и второе направление вращения могут быть одинаковыми, или могут отличаться друг от друга. Способ может дополнительно содержать использование механизма смещения в радиальном направлении, например, включающего дорожку и один или более копирных элементов, которые были описаны выше, находящегося в функциональном зацеплении с элементом перемещения и позволяющего поддерживать постоянное или в сущности постоянное минимальное расстояние между поверхностями перемещения и движущимся несущим элементом в точке переноса дискретного изделия, или в непосредственной близости к такой точке переноса.
В другом воплощении способа может использоваться система перемещения, содержащая раму, определяющую ось вращения, и один или более элементов перемещения, каждый из которых содержит поверхность перемещения, конфигурация которой обеспечивает прием одного или более дискретных изделий. Поверхность перемещения может быть плоской, в сущности плоской, или может содержать в сущности плоские части. Способ может содержать этапы вращения одного или более элементов перемещения вокруг оси вращения таким образом, что каждая из поверхностей перемещения имеет тангенциальную составляющую скорости, равную или в сущности равную скорости или тангенциальной составляющей скорости движущегося несущего элемента в точке переноса дискретного изделия, и поддержания постоянного или в сущности постоянного минимального расстояния между поверхностью перемещения и движущимся несущим элементом в точке переноса дискретного изделия. Постоянное или в сущности постоянное минимальное расстояние может поддерживаться за счет движения каждой из поверхностей перемещения в радиальном направлении вовнутрь и в радиальном направлении наружу по отношению к оси вращения в точке переноса дискретного изделия. Этап поддержания тангенциальной составляющей скорости поверхности перемещения, равной или в сущности равной скорости или тангенциальной составляющей скорости движущегося несущего элемента, может содержать движение поверхности перемещения в радиальном направлении и в радиальном направлении наружу по отношению к оси вращения в точке переноса дискретного изделия. Способ может также содержать этап вращения поверхности перемещения вокруг оси вращения между первым положением и по меньшей мере вторым положением, включая движение в радиальном направлении во время вращения, как было описано выше.
В одном из воплощений в способе перемещения дискретных изделий между первым движущимся несущим элементом и вторым движущимся несущим элементом может использоваться система перемещения, содержащая раму, определяющую ось вращения, и один или более элементов перемещения, каждый из которых содержит плоскую, в сущности плоскую и/или дугообразного профиля поверхность перемещения. В других воплощениях поверхность перемещения может содержать плоские части. Поверхность перемещения может иметь конфигурацию, обеспечивающую прием одного или более дискретных изделий. Способ может содержать этапы вращения элемента перемещения вокруг оси вращения и поддержания постоянного или в сущности постоянного минимального расстояния между плоской или в сущности плоской поверхностью перемещения и первым движущимся несущим элементом и вторым движущимся несущим элементом в точках переноса дискретных изделий. Первый движущийся несущий элемент может иметь первую скорость в точке переноса дискретного изделия, а второй движущийся несущий элемент может иметь вторую скорость в точке перемещения дискретного изделия, отличную от первой скорости. Первая скорость и вторая скорость могут быть тангенциальными составляющими скорости. Способ может также содержать этап вращения поверхности перемещения вокруг второй оси вращения между первым положением и вторым положением, включая движение в радиальном направлении во время вращения, как было описано выше.
Во всех описанных выше способах может использоваться этап удержания одного или более дискретных изделий на поверхности перемещения с помощью, например, давления газообразной среды, статического, магнитного и/или адгезивного притяжения.
В одном из воплощений элементы перемещения, колеса, диски 139 распределения газообразной среды, и/или любая другая часть или компонент, которые вращаются вокруг оси 132 вращения, могут содержать алюминий, сталь, пластмассу, титан, композиты на основе угольного волокна и/или прочие высокопрочные и легкие материалы. За счет использования высокопрочных и легких материалов может быть уменьшена инертная масса, вращающаяся вокруг оси 132 вращения по сравнению с системами перемещения в соответствии с существующим уровнем техники. За счет такого снижения инертной массы системы перемещения в соответствии с настоящим изобретением могут использоваться с более высокой производительностью, то есть могут обеспечивать перемещение большего количества дискретных изделий в минуту.
В различных воплощениях системы перемещения в соответствии с настоящим изобретением могут обеспечивать обработку или перенос более 800 дискретных изделий в минуту, более 900 дискретных изделий в минуту, более 1000 дискретных изделий в минуту, более 1100 дискретных изделий в минуту, более 1200 дискретных изделий в минуту, или более 1300 дискретных изделий в минут. В некоторых воплощениях системы перемещения в соответствии с настоящим изобретением могут обеспечивать обработку или перенос от 600 до 1500 дискретных изделий в минуту, включая любое целое число дискретных изделий в минуту в пределах указанного диапазона.
Любые из способов или устройств, описанных в настоящей заявке, могут использоваться в сочетании с инновационными концепциями, описанными в европейской патентной заявке ЕР 12162251.8 «Способ и устройства для изготовления абсорбирующих изделий личной гигиены», поданной 29 марта 2012 года.
Размеры и их значения, содержащиеся в данном документе, не следует рассматривать как строго ограниченные в точности приведенными значениями. Напротив, если не оговорено особо, под приведенным значением понимается данное значение в точности и все значения, находящиеся в функционально эквивалентной его окрестности. Так, например, значение, обозначенное как 40 мм, следует рассматривать как «примерно 40 мм».
Все документы, на которые приводятся ссылки в настоящем описании, включая ссылки на иные патенты и заявки, цитируются целиком, если явно не оговорено, что они цитируются частично или с ограничениями. Цитирование какого-либо документа не означает признание того, что цитируемый документ должен быть включен в уровень техники по отношению к изобретению, изложенному в настоящей заявке, или что цитируемое изобретение само по себе или в сочетании с другим документом, или другими документами, объясняет, предлагает или описывает идею настоящего изобретения. Кроме того, если какое-либо значение или определение понятия в настоящем документе не совпадает со значением или определением данного понятия в документе, на который дается ссылка, следует руководствоваться значением или определением данного понятия, содержащимся в настоящем документе.
Несмотря на то, что в данном документе иллюстрируются и описываются конкретные воплощения настоящего изобретения, сведущим в данной области техники будет очевидно, что возможно внесение прочих изменений и модификаций, не нарушающих идею и назначение изобретения. С этой целью имелось в виду в прилагаемой формуле изобретения представить все возможные подобные изменения и модификации в объеме настоящего изобретения.
Реферат
В настоящем изобретении предлагается способ приложения давления газообразной среды к части элемента перемещения системы перемещения. Элемент перемещения вращается вокруг первой оси вращения и содержит головную часть и хвостовую часть. Часть элемента перемещения выполнена с возможностью вращения вокруг второй оси вращения между первым положением и вторым положением. Способ содержит этапы: обеспечения трубопровода газообразной среды, связанного по газообразной среде с головной частью или хвостовой частью части элемента перемещения, когда часть элемента перемещения находится в первом положении; вращения части элемента перемещения между первым положением и вторым положением; и поддержания связи по газообразной среде трубопровода газообразной среды с той же самой - головной или хвостовой - частью части элемента перемещения после того, как часть элемента перемещения была переведена во второе положение. 3 н. и 18 з.п. ф-лы, 43 ил.
Формула
обеспечивают трубопровод газообразной среды, связанный по газообразной среде с головной частью или хвостовой частью упомянутой части элемента перемещения, когда упомянутая часть элемента перемещения находится в первом положении;
вращают упомянутую часть элемента перемещения между первым положением и вторым положением; и
поддерживают связь по газообразной среде трубопровода газообразной среды с той же самой - головной или хвостовой - частью упомянутой части элемента перемещения после того, как упомянутая часть элемента перемещения переведена во второе положение.
обеспечивают второй трубопровод газообразной среды, связанный по газообразной среде с другой из головной и хвостовой частей упомянутой части элемента перемещения, когда упомянутая часть элемента перемещения находится в первом положении; и
поддерживают связь по газообразной среде второго трубопровода газообразной среды с той же самой - головной или хвостовой - частью упомянутой части элемента перемещения после того, как упомянутая часть элемента перемещения переведена во второе положение.
раму, определяющую первую ось вращения;
элемент перемещения, выполненный с возможностью вращения вокруг первой оси вращения, при этом часть элемента перемещения выполнена с возможностью вращения между первым положением и вторым положением вокруг второй оси вращения при вращении элемента перемещения вокруг первой оси вращения, при этом первая ось вращения является протяженной в первом направлении, а вторая ось вращения является протяженной во втором направлении, отличном от первого направления, и при этом упомянутая часть элемента перемещения содержит:
первую зону;
вторую зону;
третью зону; и
четвертую зону;
первый трубопровод газообразной среды, связанный по газообразной среде с первой зоной и второй зоной, когда упомянутая часть элемента перемещения находится в первом положении, и связанный по газообразной среде с первой зоной и третьей зоной, когда упомянутая часть элемента перемещения находится во втором положении; и
второй трубопровод газообразной среды, связанный по газообразной среде с третьей зоной и четвертой зоной, когда упомянутая часть элемента перемещения находится в первом положении, и сообщающийся по газообразной среде с четвертой зоной и второй зоной, когда упомянутая часть элемента перемещения находится во втором положении.
элемент перемещения, содержащий часть, содержащую головную часть и хвостовую часть при его вращении вокруг первой оси вращения, при этом упомянутая часть элемента перемещения выполнена с возможностью вращения вокруг второй оси вращения между первым положением и вторым положением при вращении вокруг первой оси вращения, при этом упомянутая часть элемента перемещения содержит:
первую зону;
вторую зону;
третью зону; и
четвертую зону;
при этом первая зона и вторая зона по меньшей мере частично образуют хвостовую или головную часть части элемента перемещения, когда упомянутая часть элемента перемещения находится в первом положении, и при этом первая зона или вторая зона и третья зона или четвертая зона по меньшей мере частично образуют ту же самую часть: хвостовую часть или головную часть - упомянутой части элемента перемещения, когда упомянутая часть элемента перемещения находится во втором положении; и
трубопровод газообразной среды, связанный по газообразной среде с первой зоной и второй зоной, когда упомянутая часть элемента перемещения находится в первом положении, и связанный по газообразной среде с первой зоной или второй зоной и с третьей зоной или четвертой зоной, когда упомянутая часть элемента перемещения находится во втором положении.
Комментарии