Фальцевальное устройство и способ фальцевания продукта - RU2593217C2
Код документа: RU2593217C2
Чертежи















































Описание
Область техники
Изобретение относится к фальцевальному устройству (аппарату) и к способам фальцевания (складывания) продуктов (изделий); более конкретно, оно относится к аппарату и к способам фальцевания изделий с улучшенным контролем позиционирования при относительно высоких линейных скоростях.
Уровень техники
Одной из известных технологий, применяемых для фальцевания изделий в процессе их продвижения внутри системы изготовления, является ″ножевая фальцовка″. Ножевая фальцовка предусматривает ударное воздействие на дискретное движущееся изделие в заданном месте посредством лезвия, чтобы сформировать в изделии ″загиб″ (фальц). Этот фальц вводится в систему движущихся в одном направлении конвейерных лент, чтобы наложить части изделия одну на другую. Примеры подобных ножевых фальцевальных аппаратов (фальцаппаратов) и способов их применения описаны в патентах США №№4053150; 4519596 и 4650173. С помощью ножевого фальцевального аппарата можно складывать различные изделия, в том числе одноразовые изделия (предметы) личной гигиены. Подобные изделия хорошо известны; они включают пеленки, тренировочные трусики (трусики для приучения ребенка к горшку), защитное белье для страдающих недержанием, гигиенические прокладки, подкладные клеенки, маты для домашних животных, столовые салфетки, полотенца, чехлы для стульев и т.д.
Один недостаток известной технологии ножевой фальцовки состоит в том, что точность и воспроизводимость линий сгиба в изделиях зависит от момента, в который нож ударяет по движущемуся изделию, а также от сцепления движущихся конвейерных лент с фальцем на изделии. Кроме того, ножевая фальцовка требует, чтобы в момент удара лезвием изделие было ″свободным″. Следовательно, в процессе фальцовки существует период времени, когда ведущая часть изделия не зафиксирована и, как следствие, не находится под прямым позиционным контролем. Названные свойства ножевой фальцовки нежелательны, если требуется точный контроль положения линии сгиба, особенно в случае высокой производительности, составляющей, в зависимости от фальцуемых изделий, от 400 до 4000 изделий в минуту.
Еще одним недостатком ножевой фальцовки является ″эффект удара″. Другими словами, силовое воздействие со стороны ножа, ударяющего по изделию, может привести к получению деформированного или поврежденного изделия при низкой точности позиционирования линий сгиба, к низкой воспроизводимости и к другим нежелательным результатам.
Раскрытие изобретения
Таким образом, существует потребность в фальцевальном аппарате и способе фальцевания изделий с высокими скоростями, обеспечивающих высокую воспроизводимость позиционирования на высоких скоростях. Существует также потребность в аппарате и в способах фальцевания изделий без результирующих деформаций, повреждений и/или иных нежелательных эффектов, присущих современным ножевым фальцаппаратам и способам фальцевания.
Согласно одному аспекту изобретения аппарат для фальцевания изделия, имеющего первую и вторую части, содержит приемный валик, имеющий первое направление вращения. Данный валик выполнен с возможностью селективно удерживать на себе первую и вторую части изделия. Фальцевальный валик имеет второе направление вращения, противоположное первому направлению вращения. Этот валик выполнен с возможностью селективно удерживать на себе первую часть изделия. Осциллирующий компонент выполнен с возможностью переносить первую часть изделия с приемного валика на фальцевальный валик. Данный компонент сконфигурирован с возможностью двигаться в обоих, первом и втором, направлениях.
Согласно другому аспекту аппарат для фальцевания изделий, имеющих первую часть, вторую часть и поперечную ось фальцевания, содержит приемный валик, выполненный с возможностью удерживать на себе первую и вторую части изделия и освобождать первую часть при продолжении удерживания второй части изделия. Приемный валик сконфигурирован с возможностью вращаться в первом направлении. Осциллирующий компонент расположен вблизи приемного валика и выполнен с возможностью двигаться в первом и втором направлениях. Данный компонент способен принимать первую часть изделия с приемного валика при своем движении во втором направлении. Фальцевальный валик расположен вблизи приемного валика и осциллирующего компонента. Этот валик выполнен с возможностью вращаться во втором направлении и сконфигурирован для приема первой части изделия от осциллирующего компонента при движении этого компонента в первом направлении и для переноса первой части изделия на приемный валик со складыванием изделия, по существу, вдоль поперечной оси фальцевания при наложении первой части изделия на вторую часть.
Согласно еще одному аспекту способ фальцевания изделия включает подачу на приемный валик изделия, которое имеет первую часть, вторую часть и поперечную ось фальцевания, разделяющую первую и вторую части. Первую и вторую части изделия удерживают на приемном валике при его вращении в первом направлении. Осуществляют перенос первой части изделия с приемного валика на осциллирующий компонент при движении осциллирующего компонента во втором направлении. Затем направление движения осциллирующего компонента изменяют со второго на первое направление и осуществляют перенос первой части изделия с осциллирующего компонента на фальцевальный валик при движении осциллирующего компонента в первом направлении и вращении фальцевального валика во втором направлении. После этого осуществляют перенос первой части изделия с фальцевального валика на приемный валик в положении, в котором первая часть изделия наложена на вторую часть и изделие сложено по поперечной оси фальцевания.
Краткое описание чертежей
На фиг.1 схематично изображена часть системы изготовления изделия, использующей в одном своем варианте два фальцевальных аппарата.
На фиг.2 в перспективном изображении представлен, отдельно от системы изготовления, фальцевальный аппарат, содержащий приемный валик, осциллирующий компонент, фальцевальный валик и переносящий валик.
На фиг.3 фальцевальный аппарат по фиг.2 показан на виде спереди.
На фиг.4 представлен, в перспективном изображении, приемный валик фальцевального аппарата.
На фиг.5 приемный валик по фиг.4 показан на виде справа.
На фиг.6 приемный валик показан на виде слева.
На фиг.7 приемный валик показан на виде снизу.
На фиг.8 приемный валик показан на виде сверху.
На фиг.9 приемный валик показан в продольном разрезе.
На фиг.10 и 11 приемный валик показан в перспективном изображении, со снятым наружным цилиндром.
На фиг.12 представлен, в перспективном изображении, осциллирующий компонент фальцевального аппарата.
На фиг.13 осциллирующий компонент по фиг.12 показан на виде слева.
На фиг.14 осциллирующий компонент показан на виде справа.
На фиг.15 осциллирующий компонент показан на виде сверху.
На фиг.16 осциллирующий компонент показан на виде снизу.
На фиг.17 осциллирующий компонент показан в продольном разрезе.
На фиг.18 осциллирующий компонент показан в перспективном изображении, со снятым наружным цилиндром.
На фиг.19 осциллирующий компонент со снятым наружным цилиндром согласно фиг.18 показан на виде сверху.
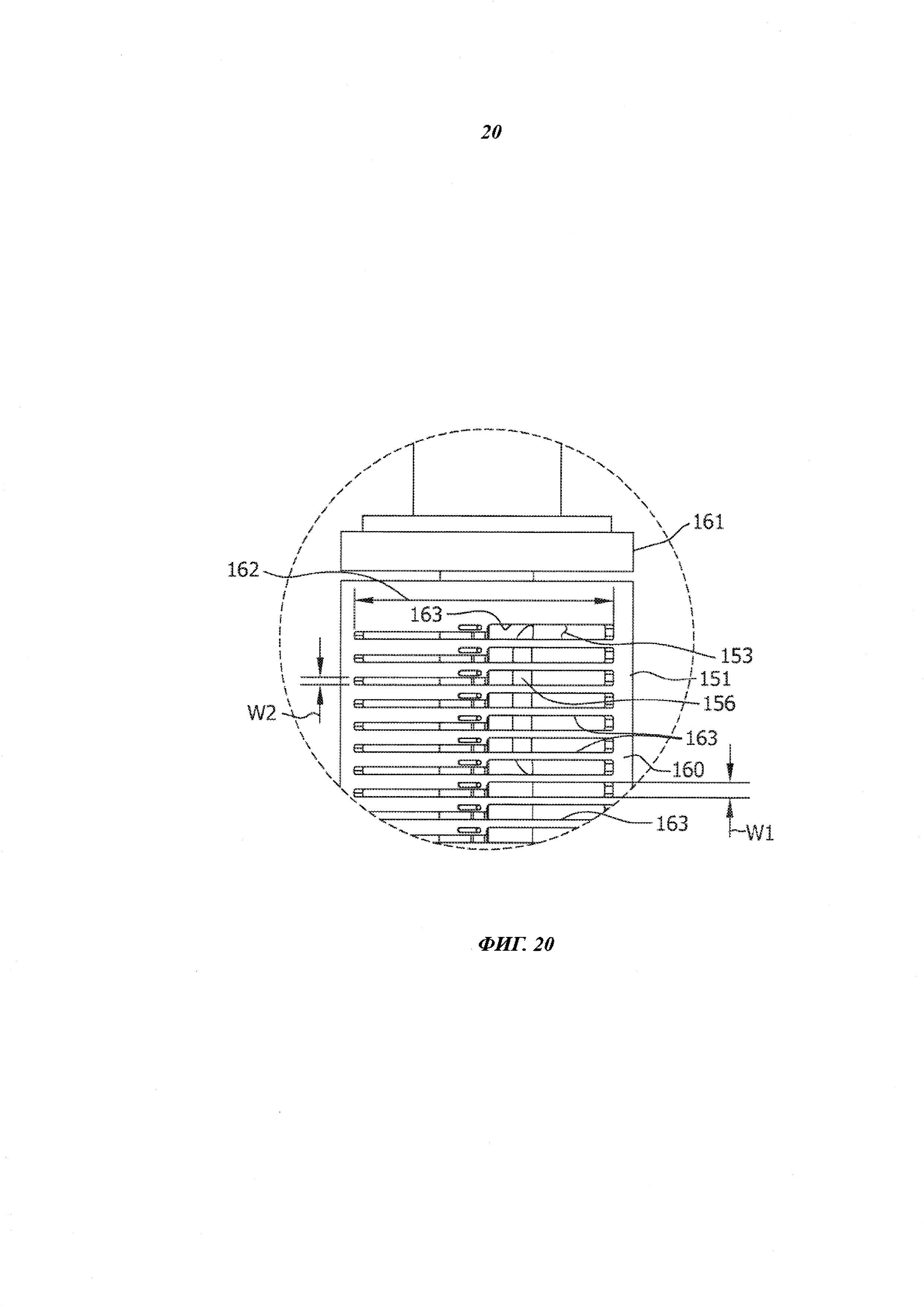
На фиг.20 показана, в увеличенном масштабе, часть осциллирующего компонента по фиг.19.
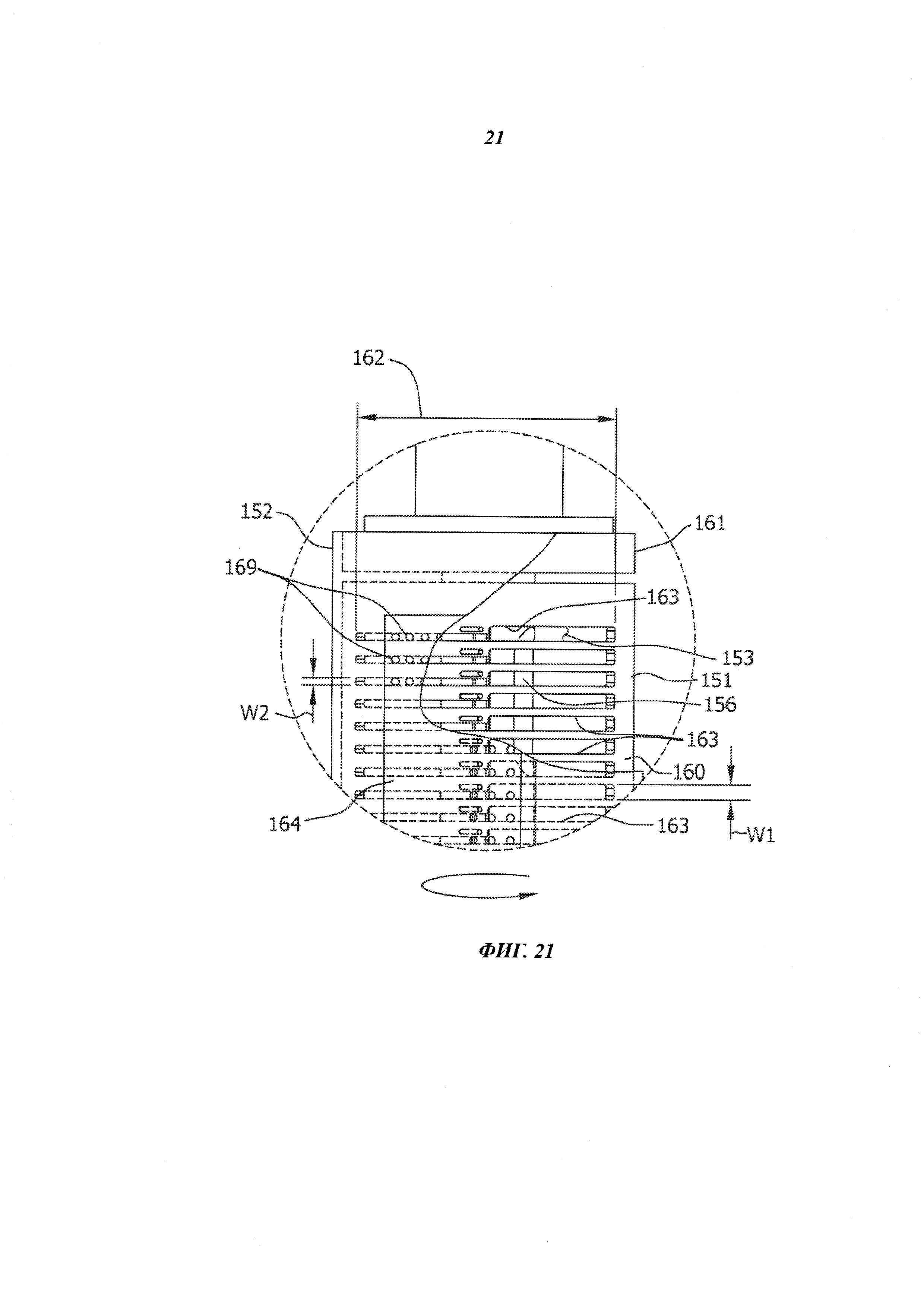
На фиг.21 на виде, аналогичном виду по фиг.20, показан наружный цилиндр, который охватывает внутренний цилиндр, находящийся в первом положении; при этом часть наружного цилиндра удалена.
На фиг.22 на виде, аналогичном виду по фиг.20, показан внутренний цилиндр, сместившийся относительно наружного цилиндра во второе положение.
На фиг.23 представлен, в перспективном изображении, фальцевальный валик фальцевального аппарата.
На фиг.24 фальцевальный валик по фиг.23 показан на виде справа.
На фиг.25 фальцевальный валик показан на виде слева.
На фиг.26 фальцевальный валик показан на виде снизу.
На фиг.27 фальцевальный валик показан на виде сверху.
На фиг.28 фальцевальный валик показан в продольном разрезе.
На фиг.29 и 30 фальцевальный валик показан в перспективном изображении, со снятым наружным цилиндром.
На фиг.31 представлен, в перспективном изображении, переносящий валик фальцевального аппарата.
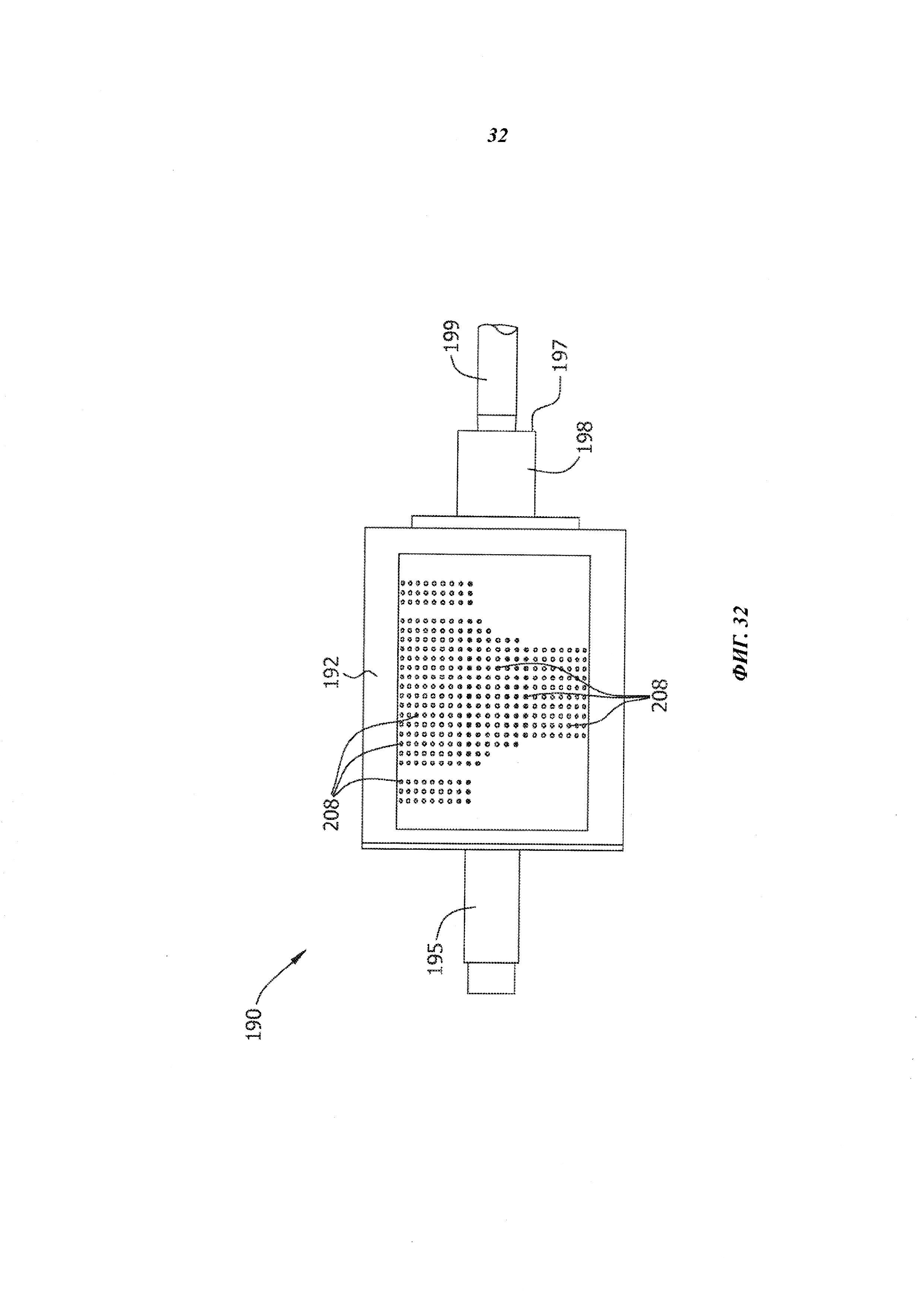
На фиг.32 переносящий валик по фиг.31 показан на виде справа.
На фиг.33 переносящий валик показан на виде слева.
На фиг.34 переносящий валик показан на виде снизу.
На фиг.35 переносящий валик показан на виде сверху.
На фиг.36 переносящий валик показан в продольном разрезе.
На фиг.37 переносящий валик показан в перспективном изображении, со снятым наружным цилиндром.
На фиг.38 переносящий валик со снятым наружным цилиндром показан на виде сверху.
На фиг.39 представлены, на виде сверху, тренировочные трусики в исходной, разложенной конфигурации, с удаленной частью.
На фиг.40 трусики по фиг.39 показаны на виде сверху, в сфальцованной конфигурации.
На фиг.41 трусики показаны в перспективном изображении, частично застегнутыми и готовыми к использованию.
На фиг.42 показаны, на виде сверху, тренировочные трусики, имеющие передние и задние боковые клапаны.
На фиг.43 трусики показаны на виде сверху, аналогичном виду по фиг.42, но с подогнутыми передними боковыми клапанами.
На фиг.44 трусики показаны на виде сверху, аналогичном виду по фиг.43, но с инвертированными (перевернутыми) частями задних боковых клапанов.
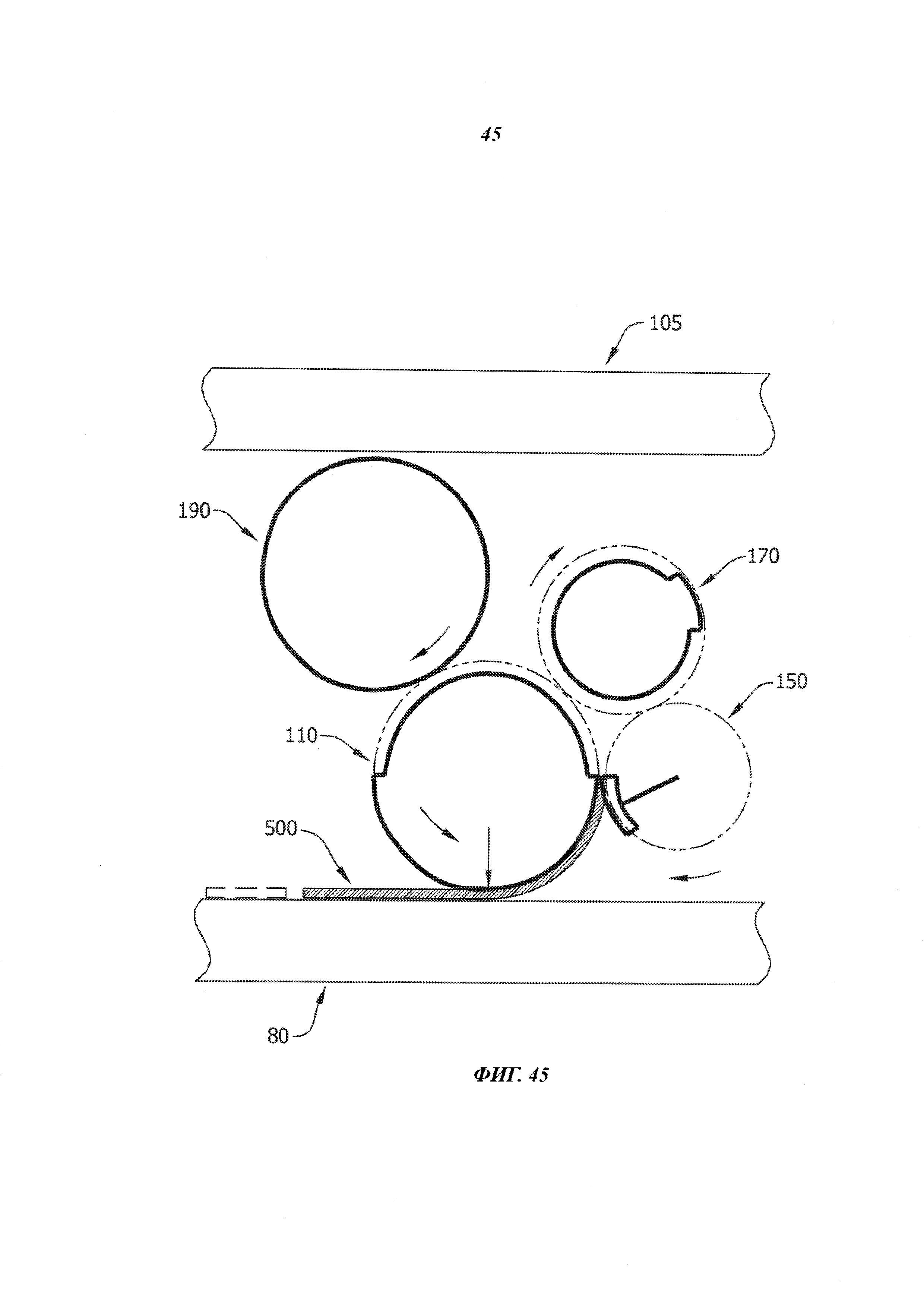
На фиг.45 представлена схема фальцевального аппарата с входящими в него тренировочными трусиками, которые находятся в своей исходной, разложенной конфигурации и удерживаются на приемном валике.
На фиг.46 представлена схема фальцевального аппарата в положении, в котором первая часть трусиков переносится с приемного валика на осциллирующий компонент, а их вторая часть удерживается на приемном валике.
На фиг.47 представлена схема фальцевального аппарата в положении, в котором начинается фальцевание трусиков, причем их первая часть удерживается на осциллирующем компоненте, а вторая часть - на приемном валике.
На фиг.48 представлена схема фальцевального аппарата в положении, в котором первая часть трусиков переносится с осциллирующего компонента на фальцевальный валик, а вторая часть удерживается на приемном валике.
На фиг.49 представлена схема фальцевального аппарата в положении, в котором первая часть трусиков удерживается на фальцевальном валике, а вторая часть - на приемном валике.
На фиг.50 представлена схема фальцевального аппарата в положении, в котором трусики, находящиеся в своей сфальцованной конфигурации, переносятся с приемного валика на переносящий валик.
На фиг.51 приведен график, иллюстрирующий вариант профилей скоростей для приемного валика, осциллирующего компонента и фальцевального валика.
На фиг.52(a)-(f) схематично, в графической форме иллюстрируются профили скоростей по фиг.51 в 6 различных точках по временной шкале.
На фиг.53 и 54 схематично иллюстрируются относительные положения приемного валика, осциллирующего компонента, фальцевального валика и переносящего валика.
На фиг.55 в графической форме иллюстрируются ограничения фальцевальной системы по фиг.1.
Идентичные или сходные части и элементы имеют одинаковые обозначения на всех чертежах.
Осуществление изобретения
На фиг.1 схематично изображена часть системы 50, предназначенной для изготовления изделия (такого как предмет личной гигиены), содержащая вариант фальцевального аппарата 100. В представленной конфигурации система 50 изготовления содержит два фальцевальных аппарата 100; однако, эта система может иметь и большее их количество (или всего один фальцевальный аппарат). Фальцевальный аппарат 100 способен осуществлять точное управление изделием в процессе его фальцевания с высокой скоростью. В результате изделия, производимые представленной системой 50, фальцуются с большей точностью, с лучшей воспроизводимостью и с приложением меньшего усилия (и, как следствие, с меньшими повреждениями и деформациями), чем при использовании известных фальцевальных аппаратов, таких как ножевые фальцаппараты. В данном описании термин ″с высокой скоростью (производственной линии)″ соответствует производительности 400 изделий/мин (и./м) или выше, например от 400 до 4000 и./м или от 600 до 3000 и./м, или от 900 до 1500 и./м. Однако нужно понимать, что производительность непосредственно зависит от производимых изделий. Поэтому термин ″с высокой скоростью″ является относительным, и скорость может варьировать при переходе от одного изделия к другому.
Далее, только в качестве примера, представленная система 50 изготовления и, соответственно, фальцевальный аппарат 100 будут описаны как система изготовления и аппарат для фальцевания одноразовых тренировочных трусиков. Однако должно быть понятно, что, без выхода за пределы изобретения, систему 50 изготовления и фальцевальный аппарат 100 можно сконфигурировать для изготовления и фальцевания многих других изделий, включая (но не ограничиваясь ими) другие типы предметов личной гигиены, изделия из фольги и пленки, тканые изделия, упаковочные изделия, изделия промышленного назначения, пищевые продукты и т.д., как одноразового, так и многоразового пользования, гигроскопичные и негигроскопичные. В частности, другие предметы личной гигиены, которые могут производиться системой 50 и фальцеваться фальцевальным аппаратом 100, включают (не ограничиваясь ими) пеленки, защитное белье для страдающих недержанием, гигиенические прокладки и тампоны.
Как проиллюстрировано на фиг.1, множество дискретных изделий (тренировочных трусиков) 500 подается первым транспортирующим компонентом 80, который доставляет каждые трусики 500 в исходной конфигурации к одному из двух фальцевальных аппаратов 100 для придания им требуемой, сфальцованной конфигурации. Сфальцованные тренировочные трусики 500 транспортируют от фальцевального аппарата 100 посредством второго транспортирующего компонента 105 к другим (не изображенным) компонентам системы 50. Поскольку оба аппарата 100, показанные на фиг.1, по существу, одинаковы, далее будет описан только один из них.
Как показано на фиг.2 и 3, фальцевальный аппарат 100 содержит приемный валик 110, осциллирующий компонент 150, фальцевальный валик 170 и переносящий валик 190. Далее в описании и на чертежах с перечисленными частями будут ассоциированы именно указанные цифровые обозначения.
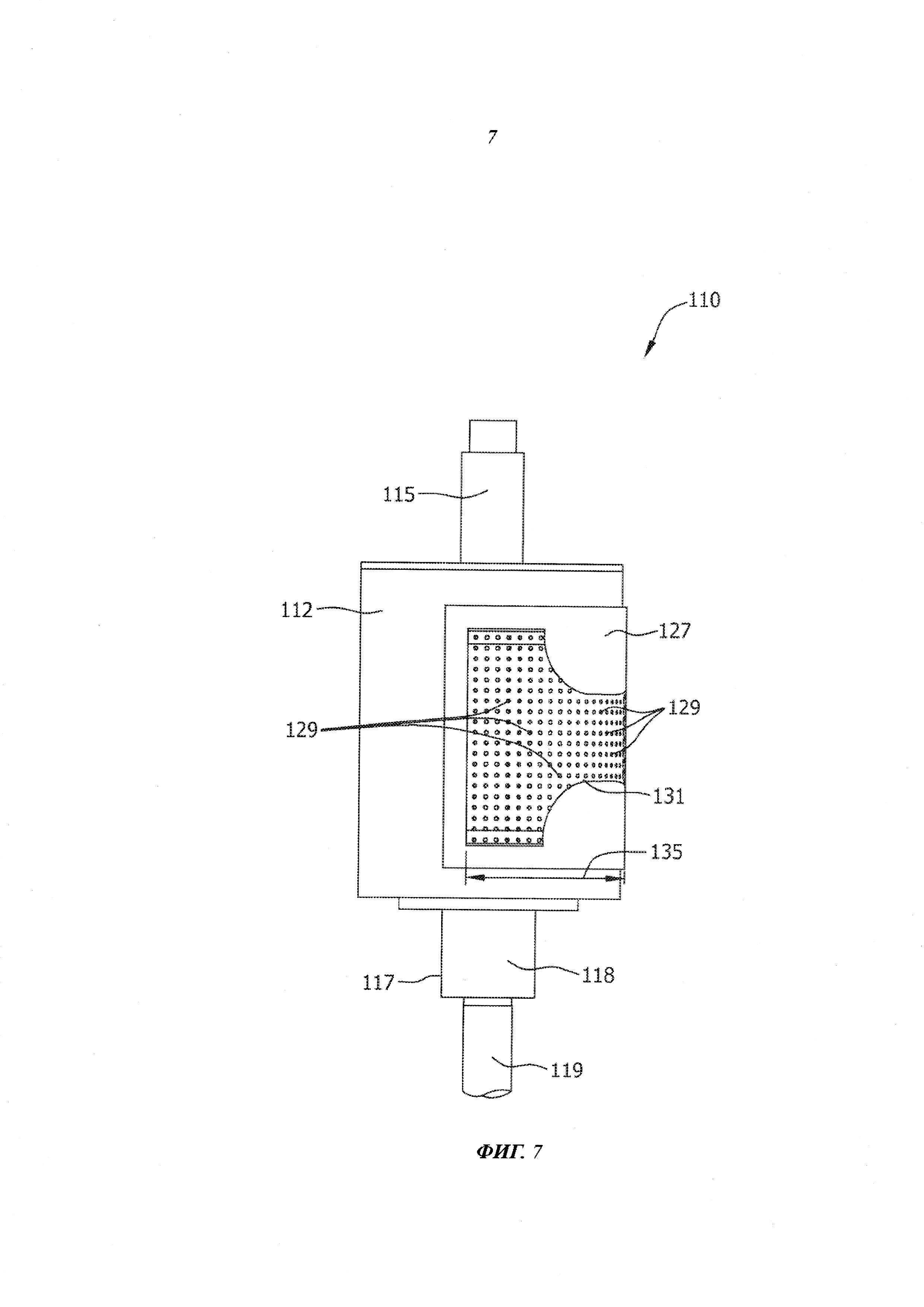
Приемный валик 110 содержит внутренний цилиндр 111 (см. фиг.9-11) и наружный цилиндр 112 (см. фиг.4-9), который может вращаться вокруг внутреннего цилиндра. Как показано на фиг.4-8, у наружного цилиндра 112 имеется выступающий несущий элемент 127, выполненный с возможностью принимать, удерживать и перемещать тренировочные трусики 500 через фальцевальный аппарат 100. В выступающем несущем элементе 127 выполнено множество круглых отверстий 129, положение которых соответствует профилю трусиков 500 в их исходной конфигурации. У несущего элемента 127 имеются первая зона 133 и вторая зона 135. Отверстия 129 во второй зоне 135 смещены относительно отверстий в первой зоне 133. Более конкретно, отверстия 129 в первой и второй зонах 133, 135 образуют колонки 131, расположенные поперечно образующей приемного валика 110, и ряды, расположенные вдоль указанной образующей. Как показано на фиг.5, отверстия 129, образующие колонки 131 во второй зоне 135, смещены вдоль образующей цилиндра относительно отверстий, образующих колонки в первой зоне 133. Наружный цилиндр 112 закрыт с торцов парой концевых пластин 132 (фиг.9).
Проиллюстрированный приемный валик 110 выполнен с возможностью за время одного оборота принимать и удерживать одну пару трусиков 500. Должно быть, однако, понятно, что приемный валик 110 может быть выполнен с возможностью за время одного оборота принимать и удерживать множество тренировочных трусиков 500. Должно быть также понятно, что несущий элемент 127 может быть выполнен заподлицо с наружным цилиндром 112 (т.е. не выступающим из него). Кроме того, должно быть понятно, что отверстия 129 в несущем элементе 127 наружного цилиндра 112 могут быть расположены и иным образом, причем их может быть больше или меньше, чем показано на прилагаемых чертежах, и что форма и размеры этих отверстий могут отличаться от проиллюстрированных. Должно быть также понятно, что внутренний и наружный цилиндры могут иметь и иные формы, обеспечивающие наличие концентричных поверхностей, например формы части сфер, конусов или ступенчатых цилиндров.
В проиллюстрированном варианте внутренний цилиндр 111 является стационарным; в нем образована внутренняя камера 113 (фиг.9 и 11). Канал 115 входит в камеру 113, чтобы связать ее с подходящим для этого источником вакуума для приложения к ней вакуума. Как показано на фиг.10 и 11, стенка 120 внутреннего цилиндра 111 имеет на своей боковой поверхности три дискретных сегмента: сплошной сегмент 121; прорезанный сегмент 122, в котором выполнено множество прорезей 123 и ряд овальных отверстий 126, и открытый сегмент 124, имеющий, по существу, прямоугольный вырез 125. Каждое из овальных отверстий 126 в прорезанном сегменте 122 смещено вдоль образующей относительно соответствующей прорези 123 и сообщается с удлиненной полостью 128. Канал 130 подачи сжатого воздуха связывает данную полость с соответствующим источником сжатого воздуха (не изображен). Внутренняя камера 113 перекрывается с торцов концевыми пластинами 114, примыкающими к концам внутреннего цилиндра 111.
Как показано на фиг.4-9, с наружным цилиндром 112 функционально связан узел 117 привода для приведения этого цилиндра во вращение относительно внутреннего цилиндра 111. Узел 117 привода содержит втулку 118, связанный с ней вал 119 и приводной механизм (не изображен), способный приводить во вращение вал и втулку.
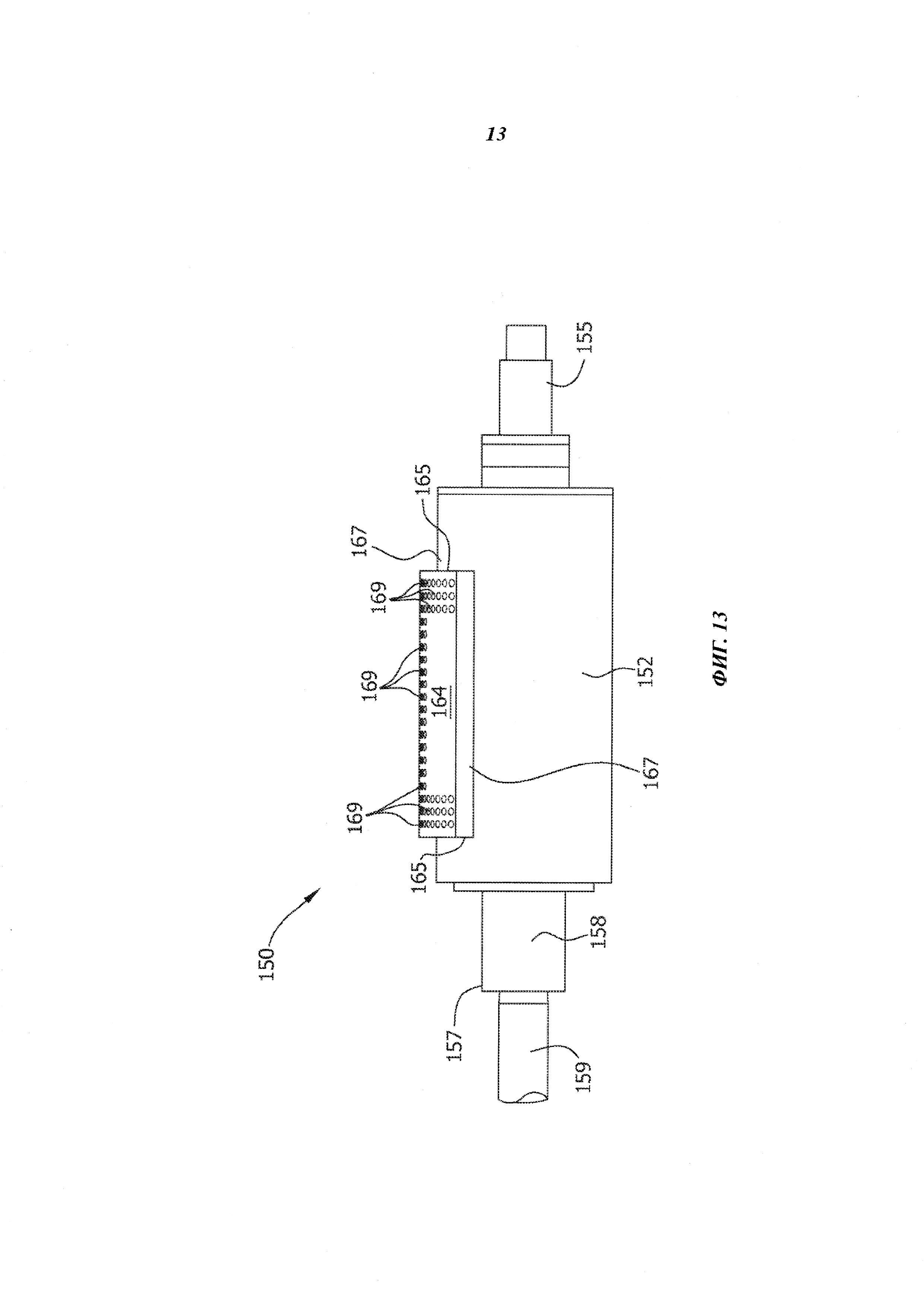
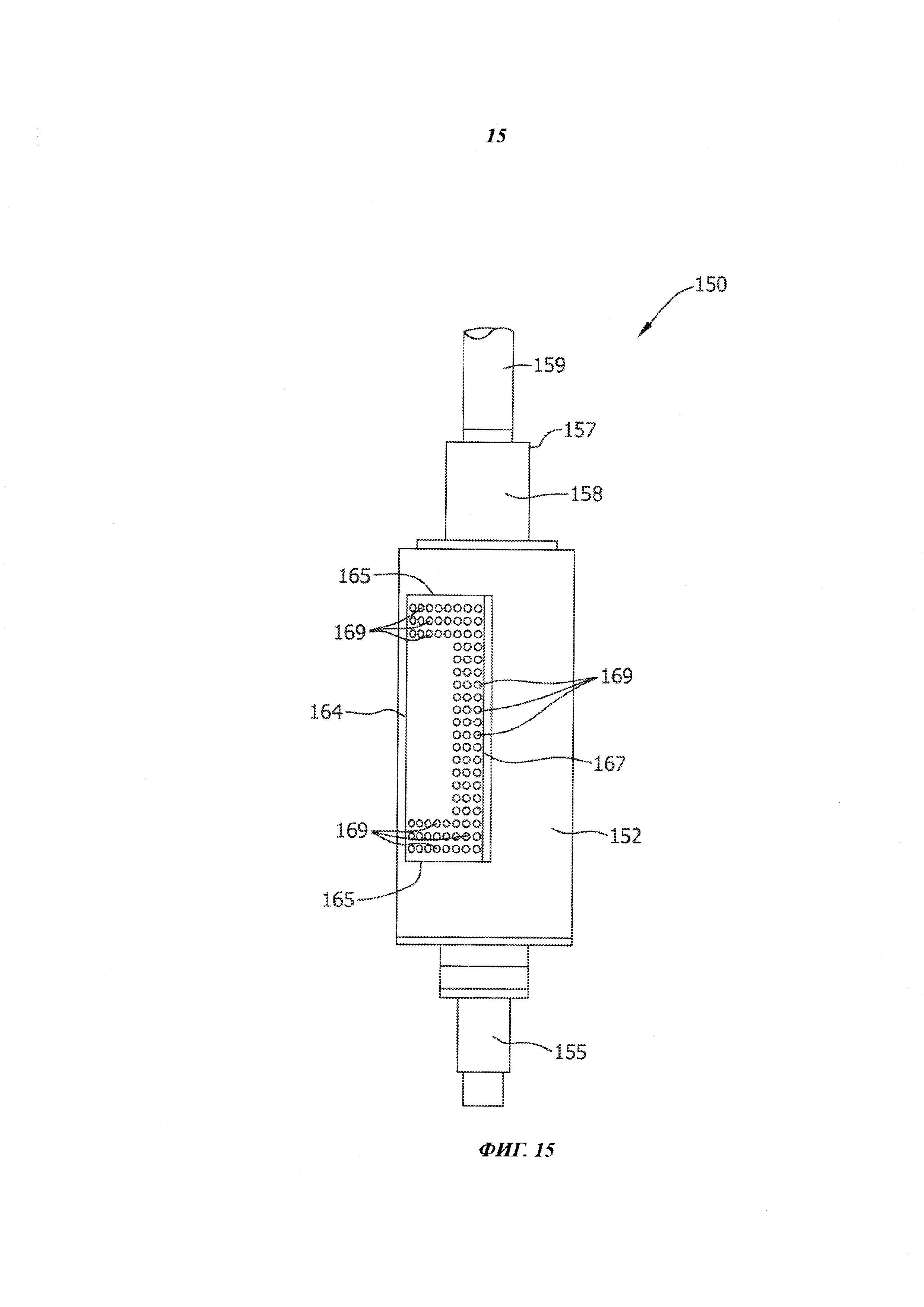
Как показано на фиг.12-22, осциллирующий компонент 150 содержит внутренний цилиндр 151 и наружный цилиндр 152, способный вращаться вокруг внутреннего цилиндра. Из фиг.12 и 13 видно, что у наружного цилиндра 152 имеется выступающий контактный элемент 164, выполненный с возможностью принимать часть тренировочных трусиков 500 от приемного валика 110 и переносить эту часть на фальцевальный валик 170. У контактного элемента 164 имеется пара поперечных сторон 165, пара продольных сторон 167 и множество круглых отверстий 169, по существу, примыкающих к поперечным сторонам и к одной из продольных, сторон. При таком выполнении часть контактного элемента 164 свободна от отверстий 169. Наружный цилиндр 152 перекрыт с торцов парой концевых пластин 161 (фиг.17).
Должно быть понятно, что контактный элемент 164 может быть выполнен заподлицо с остальной частью наружного цилиндра 152 осциллирующего компонента 150 (т.е. не выступающим из него). Кроме того, должно быть понятно, что отверстия 169 в контактном элементе 164 наружного цилиндра 152 могут быть расположены и иным образом, причем их может быть больше или меньше, чем проиллюстрировано на прилагаемых чертежах, и что форма и размеры этих отверстий могут отличаться от проиллюстрированных. Должно быть также понятно, что внутренний и наружный цилиндры могут иметь и иные формы, обеспечивающие наличие концентричных поверхностей, например формы части сфер, конусов или ступенчатых цилиндров, тем более что осциллирующий компонент не должен поворачиваться на 360°.
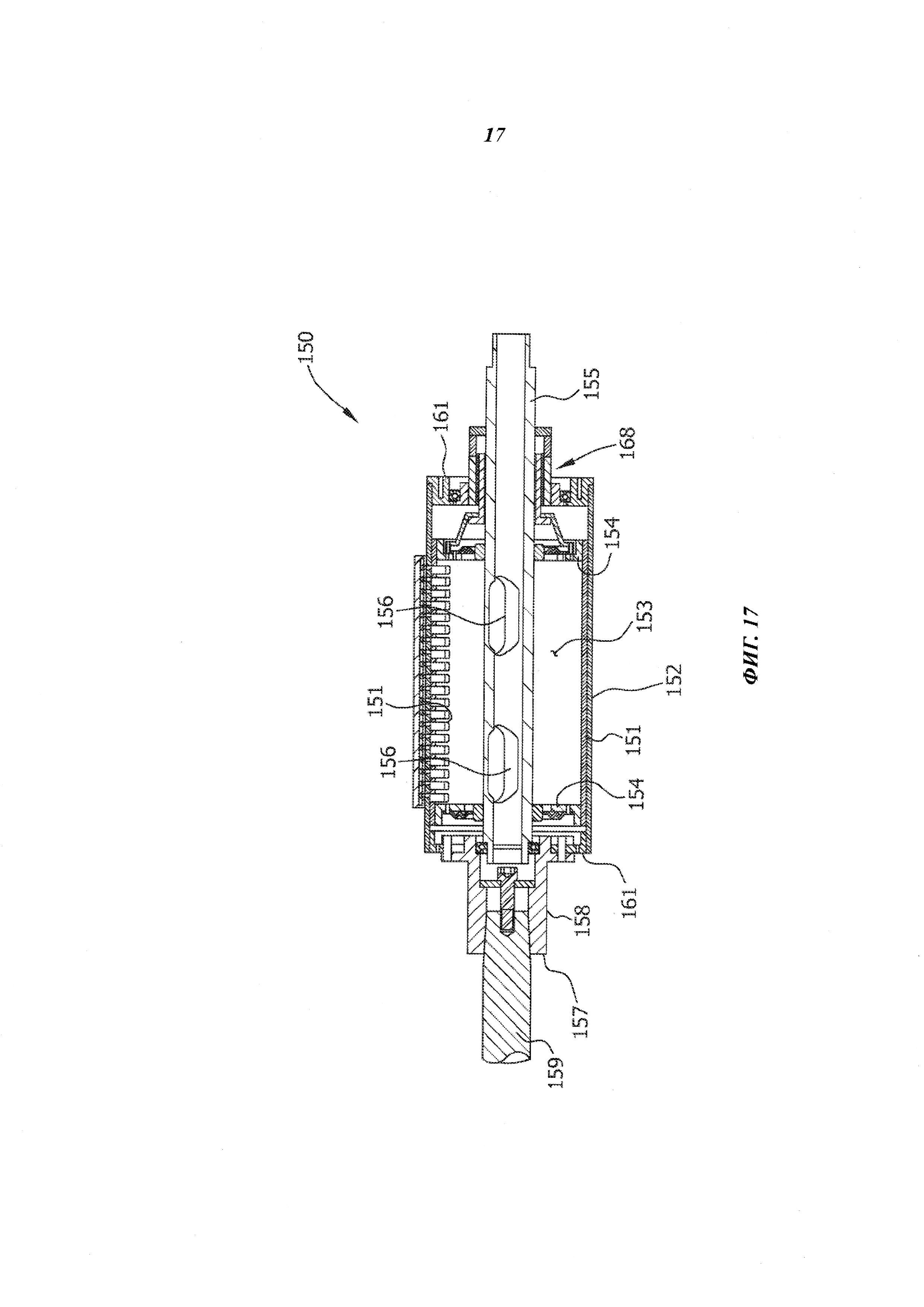
В проиллюстрированном варианте внутренний цилиндр 151 не вращается; он задает внутреннюю камеру 153 (фиг.17 и 20). Как показано на фиг.18-20, у стенки 160 внутреннего цилиндра 151 имеется прорезанный сегмент 162 с множеством прорезей 163. Ширина каждой из прорезей 163 изменяется по своей длине от первой ширины W1 до меньшей второй ширины W2 (фиг.20). Внутренняя камера 153 перекрывается с торцов парой концевых пластин 154, примыкающих к концам внутреннего цилиндра 151 (фиг.17). Канал 155 входит в камеру 153, чтобы связать ее с источником вакуума (не изображен) для приложения к ней вакуума. В одном предпочтительном варианте канал 155 проходит через внутреннюю камеру 153, причем он снабжен парой овальных отверстий 156, открытых в эту камеру (фиг.17). Должно быть понятно, что канал 155 может только частично входить во внутреннюю камеру 153 и что форма, размеры и количество отверстий 156 в канале могут быть иными.
С наружным цилиндром 152 функционально связан узел 157 привода для поворота этого цилиндра относительно внутреннего цилиндра 151. Узел 157 привода содержит втулку 158, связанный с ней вал 159 и приводной механизм (не изображен), способный приводить во вращение вал и втулку.
Как показано на фиг.17, 21 и 22, внутрь камеры 153 внутреннего цилиндра 151 осциллирующего компонента помещен исполнительный привод 168, служащий для перемещения внутреннего цилиндра относительно наружного цилиндра 152 в осевом направлении из первого во второе положение. В проиллюстрированном варианте исполнительный привод выполнен с возможностью перемещать внутренний цилиндр 151 относительно наружного цилиндра 152 в направлении, соответствующем на фиг.21 и 22 движению вниз.
В первом положении, проиллюстрированном на фиг.21, отверстия 169 в контактном элементе 164 осциллирующего компонента 150 согласованы по положению с прорезями 163 в прорезанном сегменте 162 внутреннего цилиндра 151 по всей длине прорезей. Другими словами, отверстия 169 в контактном элементе 164 согласованы как с более узкими, так и с более широкими частями прорезей 163 во внутреннем цилиндре 151. Однако во втором положении отверстия 169 в контактном элементе 164 осциллирующего компонента 150 согласованы по положению только с более широкими частями прорезей 163 (фиг.22), т.е. эти отверстия в контактном элементе 164 уже не согласованы с более узкими частями прорезей 163, когда внутренний цилиндр находится во втором положении.
В результате осциллирующий компонент 150 имеет первый вакуумный профиль, когда внутренний цилиндр 151 находится в первом положении, и второй вакуумный профиль, когда внутренний цилиндр находится во втором положении. Другими словами, когда внутренний цилиндр находится в первом положении, вакуум подается и перекрывается осциллирующим компонентом в других точках по сравнению с нахождением внутреннего цилиндра во втором положении.
В проиллюстрированном варианте исполнительный привод 168 содержит линейный электродвигатель (фиг.17), способный создавать усилие в любом из направлений в зависимости от полярности поданного на него тока. Таким образом, линейный электродвигатель способен обеспечить усилия торможения, демпфирования и удерживания. В одном эффективном варианте линейный электродвигатель способен обеспечить перемещения более чем на 15 мм с частотой до 40 или 50 Гц. В проиллюстрированном варианте подобран такой ток питания, чтобы линейный электродвигатель смещал внутренний цилиндр 151 примерно на 5 мм. На фиг.21 внутренний цилиндр 151 показан в первом положении, соответствующем нормальному (исходному) положению линейного электродвигателя. При подаче тока на линейный электродвигатель он воздействует на внутренний цилиндр 151, поступательно перемещая его примерно на 5 мм относительно наружного цилиндра 152. Другими словами, линейный электродвигатель переводит внутренний цилиндр 151 во второе положение. Предусматривается, что перемещение внутреннего цилиндра 151 относительно наружного цилиндра 152 может быть больше или меньше 5 мм. Должно быть понятно, что для перемещения внутреннего цилиндра 151 относительно наружного цилиндра 152, помимо линейных электродвигателей, могут применяться и подходящие исполнительные приводы других типов.
Как проиллюстрировано на фиг.23-30, фальцевальный валик 170 содержит внутренний цилиндр 171 и наружный цилиндр 172, который может поворачиваться вокруг внутреннего цилиндра. Из фиг.23-27 видно, что у наружного цилиндра 172 имеется выступающий контактный элемент 186, выполненный с возможностью принимать часть тренировочных трусиков 500 от осциллирующего компонента 150 и переносить эту часть на приемный валик 110. В выступающем контактном элементе 186 выполнено множество круглых отверстий 188, расположенных, по существу, в виде прямоугольника (фиг.24). Должно быть, однако, понятно, что контактный элемент 186 может быть выполнен заподлицо с наружным цилиндром 172 (т.е. не выступающим из него). Кроме того, должно быть понятно, что отверстия 188 в контактном элементе 186 наружного цилиндра 172 могут быть расположены и иным образом, причем их может быть больше или меньше, чем проиллюстрировано на прилагаемых чертежах, и что форма и размеры этих отверстий могут отличаться от проиллюстрированных. Наружный цилиндр 172 закрыт с торцов парой концевых пластин 181 (фиг.28).
В проиллюстрированном варианте внутренний цилиндр 171 является стационарным; в нем образована внутренняя камера 173 (фиг.28-30). Как проиллюстрировано на фиг.29 и 30, в стенке 179 внутреннего цилиндра 171 выполнен основной прямоугольный вырез 180 и пара дополнительных прямоугольных вырезов 182, расположенных по бокам основного выреза. Должно быть понятно, что вырезы 180, 182 во внутреннем цилиндре 171 могут иметь формы, отличные от прямоугольных, и что дополнительных вырезов может и не быть. Внутренняя камера 173 перекрывается с торцов парой концевых пластин 174, примыкающих к концам внутреннего цилиндра 171 (фиг.28). Канал 175 входит в камеру 173, чтобы связать ее с источником вакуума (не изображен) для приложения к ней вакуума. В проиллюстрированном варианте канал 175 проходит через внутреннюю камеру 173, причем он снабжен парой овальных отверстий 187, открытых в эту камеру (фиг.29 и 30). Должно быть понятно, что канал 175 может только частично входить во внутреннюю камеру и что форма, размеры и количество отверстий в канале могут быть иными.
С наружным цилиндром 172 функционально связан узел 176 привода для поворота этого цилиндра относительно внутреннего цилиндра 171. Узел 176 привода содержит втулку 177, связанный с ней вал 178 и приводной механизм (не изображен), способный приводить во вращение вал и втулку.
Как показано на фиг.31-38, переносящий валик 190 содержит внутренний цилиндр 191 и наружный цилиндр 192, который может поворачиваться вокруг внутреннего цилиндра. Из фиг.32, 34 и 35 видно, что у наружного цилиндра 192 имеется выступающий несущий элемент 206, выполненный с возможностью принимать тренировочные трусики 500 в сложенной (сфальцованной) конфигурации с приемного валика 110. В выступающем несущем элементе 206 выполнено множество круглых отверстий 208, расположенных, по существу, согласно профилю тренировочных трусиков в их сложенной конфигурации (фиг.32). Должно быть, однако, понятно, что несущий элемент 206 может быть выполнен заподлицо с наружным цилиндром 192 (т.е. не выступающим из него). Кроме того, должно быть понятно, что отверстия 208 в несущем элементе 206 наружного цилиндра 192 могут быть расположены и иным образом, причем их может быть больше или меньше, чем проиллюстрировано на прилагаемых чертежах, и что форма и размеры этих отверстий могут отличаться от проиллюстрированных. Наружный цилиндр 192 закрыт с торцов парой концевых пластин 201 (фиг.36).
В проиллюстрированном варианте внутренний цилиндр 171 является стационарным; в нем образована внутренняя камера 193 (фиг.36-38). Как показано на фиг.37 и 38, в стенке 200 внутреннего цилиндра 191 выполнены пять основных прямоугольных вырезов 202, причем по бокам каждого из них расположена пара дополнительных прямоугольных вырезов 204. Внутренняя камера 193 перекрывается с торцов парой концевых пластин 194, примыкающих к концам внутреннего цилиндра 191 (фиг.36). Канал 195 входит в камеру 193, чтобы связать ее с источником вакуума (не изображен) для приложения к ней вакуума. В одном эффективном варианте канал 195 проходит через внутреннюю камеру 193, причем он снабжен парой овальных отверстий 196, открытых в эту камеру (фиг.36 и 38). Должно быть понятно, что канал 195 может только частично входить во внутреннюю камеру и что форма, размеры и количество отверстий в канале могут быть иными.
С наружным цилиндром 192 функционально связан узел 197 привода для поворота этого цилиндра относительно внутреннего цилиндра 191. Узел 197 привода содержит втулку 198, связанный с ней вал 199 и приводной механизм (не изображен), способный приводить во вращение вал и втулку.
Приемный валик 110, осциллирующий компонент 150, фальцевальный валик 170 и переносящий валик 190 описываются как использующие вакуум для удерживания трусиков 500 на своем наружном цилиндре, т.е. они, в широком смысле, могут рассматриваться как вакуумные валики. Однако предусматривается и возможность применения, вместо вакуума, и иной приемлемой конструкции (например, с адгезивными или фрикционными компонентами или нановолосками), способной принимать, управлять положением и освобождать тренировочные трусики 500.
Как уже упоминалось, система 50 изготовления, схематично проиллюстрированная на фиг.1, и фальцевальный аппарат 100 могут быть использованы для изготовления и фальцевания тренировочных трусиков 500, конструкция которых хорошо известна специалистам. На фиг.39-41 иллюстрируется один из вариантов известных тренировочных трусиков 500, пригодный для изготовления и фальцевания, описанными системой 50 и аппаратом 100. Трусики 500 проиллюстрированы на фиг.39 в своей конфигурации, предшествующей фальцеванию (в исходной конфигурации). Следует учитывать, что ″конфигурация, предшествующая фальцеванию″ не ограничивается тренировочными трусиками, не имеющими никаких сгибов, а соответствует трусикам, поступающим в фальцевальный аппарат 100 (т.е. трусикам, которые еще не сложены (сфальцованы) заданным образом фальцевальным аппаратом). Соответственно, до поступления в фальцевальный аппарат 100 трусики 500 могут содержать или не содержать дополнительные сгибы или сфальцованные части. На фиг.40 иллюстрируются тренировочные трусики 500 в своей сфальцованной конфигурации, т.е. после того как они были сфальцованы фальцевальным аппаратом 100. Таким образом, ″сфальцованная конфигурация″ соответствует заданному фальцеванию тренировочных трусиков 500, произведенному аппаратом 100. Фиг.41 иллюстрирует трусики 500 в частично застегнутой конфигурации, готовыми к использованию.
Как показано на фиг.39, у тренировочных трусиков 500 имеются продольное направление 1, поперечное направление 2, перпендикулярное продольному направлению, передняя кромка 527 и задняя кромка 529. Имеются также передняя часть 522, задняя часть 524 и промежностная часть 526, расположенная в продольном направлении между передней и задней частями и соединяющая эти части. У трусиков 500 имеется также внутренняя (обращенная к телу ребенка) поверхность 523 и наружная (обращенная к одежде) поверхность 525, противоположная внутренней поверхности.
У проиллюстрированных тренировочных трусиков 500 имеются также наружный слой 540 и подкладка 542, прикрепленная к наружному слою, а также внутренний поглощающий материал 544, находящийся между наружным слоем и подкладкой. К подкладке 542 и/или к поглощающему материалу 544 прикреплена пара блокирующих клапанов 546, чтобы предотвратить движение, по существу, в поперечном направлении, экссудатов организма. Наружный слой 540, подкладка 542 и поглощающий материал 544 могут быть изготовлены из многих различных материалов, известных специалистам. Проиллюстрированные тренировочные трусики 500 дополнительно содержат пару взаимно противолежащих в поперечном направлении передних боковых клапанов 534 и пару взаимно противолежащих в поперечном направлении задних боковых клапанов 535. Боковые клапаны 534, 535 могут быть выполнены заодно с наружным слоем 540 или с подкладкой 542 или выполняться как отдельные элементы.
Как показано на фиг.41, передние и задние боковые клапаны 534, 535 тренировочных трусиков 500 могут селективно соединяться друг с другом посредством комплекта фиксаторных элементов (застежек) 580 с получением трехмерной конфигурации, образующей отверстие 550 для тела и пару отверстий 552 для ног. Комплект застежек 580 содержит противолежащие в поперечном направлении первые застежки 582 для рассоединяемого скрепления с соответствующими вторыми застежками 584. В одном варианте каждая первая застежка 582 содержит множество сцепляющихся элементов, выполненных с возможностью многократного сцепления и расцепления с соответствующими сцепляющимися элементами второй застежки 584 для удерживания, с возможностью рассоединения, тренировочных трусиков 500 в трехмерной конфигурации.
Застежки 582, 584 могут содержать любые скрепляемые элементы, пригодные для впитывающих влагу изделий, например такие как адгезивные, когезионные или механические. В одном конкретном варианте застежки 582, 584 содержат взаимно дополнительные механически соединяемые элементы. Приемлемые механические соединяемые элементы могут быть получены приданием им соответствующих геометрических форм, таких как крючки, петли, диски, грибки, стрелки, шарики на ножках, охватываемые и охватывающие детали, пряжки, кнопки и т.д.
В проиллюстрированном варианте первая застежка 582 является петлевой частью застежки ″велкро″, а вторая застежка 584 - ее соответствующей крючковой частью. Альтернативно, первые застежки 582 могут содержать крючки, а вторые застежки 584 - соответствующие им петли. В другом варианте застежки 582, 584 могут содержать аналогичные поверхностные застежки или адгезивные и когезионные элементы, например клеящую застежку и зону для приема такой застежки. Хотя на тренировочных трусиках 500, проиллюстрированных на фиг.41, при взаимном скреплении клапанов задние боковые клапаны 535, как это обычно делается, накладываются на передние боковые клапаны 534, трусики могут быть сконфигурированы и таким образом, чтобы при взаимном скреплении передние боковые клапаны накладывались на задние.
Проиллюстрированные тренировочные трусики 500 дополнительно содержат передний поясной эластичный элемент 554, задний эластичный поясной элемент 556 и ножные эластичные элементы 558, как это известно специалистам. Передний и задний поясные эластичные элементы 554, 556 могут быть прикреплены к наружному слою 540 и/или к подкладке 542 вблизи передней и задней кромок 527, 529 соответственно и могут проходить по всей длине этих кромок или только по их части. Ножные эластичные элементы 558 могут быть прикреплены к наружному слою 540 и/или к подкладке 542 вдоль боковых кромок 536 отверстий для ног и находиться в промежностной части 526 тренировочных трусиков 500.
Эластичные элементы 554, 556, 558 могут быть изготовлены из любого подходящего эластичного материала. Как это хорошо известно специалистам, подходящие эластичные материалы включают полотна, пряди или ленты из искусственного или синтетического каучука или из термопластичных эластомерных полимеров. Эластичные материалы могут быть растянуты и прикреплены к подложке, прикреплены к подложке, собранной в складки, или прикреплены к подложке с последующим приданием им эластичности или стягиванием, например, с использованием нагрева, чтобы придать подложке усилия, ограничивающие эластичность. Один неограничивающий вариант пригодного эластичного материала включает коалесцированные комплексные эластомерные волокна ″спандекс″, поставляемые фирмой Invista (США) под торговой маркой LYCRA.
На фиг.40 иллюстрируются тренировочные трусики 500 в своей сфальцованной конфигурации, т.е. сложенные по своей поперечной оси А-А фальцевания, так что их первая часть 571 наложена на вторую часть 572. Первая и вторая части 571, 572 тренировочных трусиков проиллюстрированы на фиг.39. В проиллюстрированном варианте внутренняя поверхность 523 первой части 571 обращена к внутренней поверхности второй части 572. Поперечная ось А-А фальцевания показана проходящей примерно через центр продольной оси тренировочных трусиков 500 в их исходной конфигурации, а положения передней и задней кромок 527, 529 сфальцованных тренировочных трусиков взаимно согласованы в поперечном направлении. Должно быть понятно, что поперечная ось А-А фальцевания может быть расположена в любом желательном месте между передней и задней кромками 527, 529, что может привести к взаимному смещению этих кромок в продольном направлении (это относится и к другим изделиям). Кроме того, если это представляется желательным, поперечная ось А-А фальцевания может быть неперпендикулярной продольному направлению 1, т.е. отклоняться от поперечного направления 2. Можно также видеть, что в проиллюстрированном варианте первая и вторая застежки 582, 584 точно совмещены одна с другой.
Как проиллюстрировано на фиг.1, пара тренировочных трусиков 500 (одна из множества пар таких трусиков, проходящих через систему 50 изготовления) доставляется первым транспортирующим компонентом 80 к одному из фальцевальных аппаратов 100. Тренировочные трусики 500 доставляются к фальцевальному аппарату 100 с подогнутыми передними боковыми клапанами 534 и с инвертированными вторыми застежками 584 (т.е. повернутыми примерно на 180°). На фиг.42 и 43 тренировочные трусики 500 показаны с передними боковыми клапанами 534 в их исходной и подогнутой конфигурациях соответственно. Как показано на фиг.43, каждый передний боковой клапан 534 подогнут таким образом, что первые застежки 582 находятся ближе одна к другой, чем до подгибания. Предусматривается возможность подгибания и других участков передней части 522 тренировочных трусиков 500 (т.е. участков, отличных от передних боковых клапанов), чтобы сблизить первые застежки 582.
На фиг.44 тренировочные трусики 500 проиллюстрированы с инвертированными вторыми застежками 584 (находящимися на задних боковых клапанах 535) и с подогнутыми передними боковыми клапанами 534. Можно видеть, что теперь первые и вторые застежки 582, 584 имеют одинаковую ориентацию. Кроме того, каждая первая застежка 582 согласована в продольном направлении с соответствующей второй застежкой 584. Как уже упоминалось, тренировочные трусики 500 доставляются к фальцевальному аппарату 100 с подогнутыми передними боковыми клапанами 534 и с инвертированными вторыми застежками 584.
В проиллюстрированном варианте к каждому фальцевальному аппарату 100 доставляется половина всех тренировочных трусиков 500. Устройства, пригодные для использования в качестве первого транспортирующего компонента 80, хорошо известны специалистам. Они включают (не ограничиваясь ими) барабаны, ролики, ленточные конвейеры, пневмоконвейеры, вакуумные конвейеры, лотки и т.д. Первый транспортирующий компонент 80 представлен, в качестве примера, в виде вакуумного ленточного конвейера. В одном эффективном варианте этот компонент содержит вспомогательное устройство, помогающее удерживать тренировочные трусики в процессе их транспортирования в контролируемом положении. Подобные средства, хорошо известные специалистам, могут включать, например, поддерживающие ленты или цилиндры, вакуумные прижимы, вспомогательные конвейерные ленты, направляющие пластины и пневматические стабилизирующие устройства.
Поскольку оба фальцевальных аппарата 100 являются одинаковыми, далее будет описана работа только одного из них. Приемный валик 110 установлен относительно первого транспортирующего компонента 80 так, чтобы отверстия 125 в открытом сегменте 124 внутреннего цилиндра 111 находились вблизи этого транспортирующего компонента 80. При этом к отверстиям 129 в несущем элементе 127 наружного цилиндра 112 прикладывается вакуум, когда они проходят перед вырезом 125 и источник вакуума прикладывает вакуум к внутренней камере 113. Наружный цилиндр 112 представленного приемного валика 110 приводится узлом 117 привода во вращение против часовой стрелки (в первом направлении) с постоянной поверхностной скоростью, предпочтительно равной скорости транспортирования тренировочных трусиков 500 первым транспортирующим компонентом 80. Источник вакуума, будучи активированным, прикладывает вакуум к внутренней камере 113 внутреннего цилиндра 111 через канал 115 и выполненные в нем отверстия 116. Тренировочные трусики 500 доставляются к приемному валику 110 первым транспортирующим компонентом 80 обращенными своим наружным слоем 540 вверх (т.е. от первого транспортирующего компонента), а своими первыми и вторыми застежками 582, 584 обращенными вниз (т.е. к этому компоненту).
Когда передняя кромка 527 тренировочных трусиков 500 подходит к приемному валику 110, наружный слой 540 трусиков оказывается напротив ведущей кромки первой зоны 133 несущего элемента 127 наружного цилиндра 112 приемного валика 110 и захватывается этой кромкой. Когда несущий элемент приемного валика при своем вращении удаляется от первого транспортирующего компонента 80, передняя кромка 527 тренировочных трусиков 500 приподнимается с первого транспортирующего компонента и переносится на приемный валик (фиг.45). По мере того как остальная часть тренировочных трусиков 500 подводится первым транспортирующим компонентом 80 к приемному валику 110, она накладывается на приемный валик и захватывается им, по существу, таким же образом, как передняя кромка 527.
Тренировочные трусики 500 доставляются к приемному валику 110 таким образом, что они, по существу, пространственно согласованы с отверстиями 129 в несущем элементе 127. В результате первая часть 571 тренировочных трусиков 500 накладывается на первую зону 133 несущего элемента 127, а их вторая часть 572 - на его вторую зону 135. В результате тренировочные трусики 500 целиком переносятся с первого транспортирующего компонента 80 на приемный валик 110 и удерживаются им.
При вращении тренировочных трусиков 500 вместе с наружным цилиндром 112 приемного валика 110 их передняя кромка 527 подходит, как показано на фиг.45, к осциллирующему компоненту 150. Внутренний цилиндр 111 сконфигурирован таким образом, что его открытый сегмент 124 имеет протяжение, по существу, от точки касания приемного валика 110 с первым транспортирующим компонентом 80 до первого зазора, образованного приемным валиком и осциллирующим компонентом. Прорезанный сегмент 122 внутреннего цилиндра 111 приемного валика 110 имеет протяжение, по существу, от первого до четвертого зазора, образованного приемным валиком и переносящим валиком. Отверстия 129 в первой зоне 133 не согласованы с прорезями 123 в прорезанном сегменте 122 внутреннего цилиндра 111; поэтому приложение вакуума к внутренней камере 113 внутреннего цилиндра 111 блокируется, что приводит к освобождению передней кромки 527 и затем всей первой части 571 тренировочных трусиков 500, когда они проходят за первый зазор.
Как показано на фиг.45, когда передняя кромка 527 тренировочных трусиков 500 приближается к первому зазору, контактный элемент 164 осциллирующего компонента 150 приближается к приемному валику в этом зазоре. Внутренний цилиндр 151 осциллирующего компонента 150 сконфигурирован таким образом, что узкие части прорезей 163 (части прорезей, имеющие меньшую ширину W2) имеют протяжение, по существу, от первого зазора до второго зазора, образованного осциллирующим компонентом 150 и фальцевальным валиком 170.
В результате передняя кромка 527 тренировочных трусиков 500 приблизится к контактному элементу 164 осциллирующего компонента 150, когда отверстия 129 в первой зоне 133 несущего элемента 127 наружного цилиндра 112 приемного валика 110 проходят над прорезанным сегментом 122 внутреннего цилиндра 111. Поскольку отверстия 129 в первой зоне 133 не согласованы с прорезями 123 в прорезанном сегменте 122, приложение вакуума к внутренней камере 113 внутреннего цилиндра 111 блокируется, так что передняя кромка 527 вращающихся тренировочных трусиков 500 освобождается. Примерно в то же время или немного раньше контактный элемент 164 осциллирующего компонента 150 контактирует с подкладкой 542 в первой части 571 тренировочных трусиков 500 в первом зазоре, образованном контактным элементом осциллирующего компонента и несущим элементом 127 приемного валика 110 (фиг.45). Поскольку в этот момент отверстия 169 в контактном элементе 164 совмещены с прорезями 163 во внутреннем цилиндре 151, тренировочные трусики 500 испытывают, через эти отверстия, действие вакуума со стороны осциллирующего компонента 150. Более конкретно, каждая первая застежка 582 и передний эластичный элемент 554 тренировочных трусиков 500 захватываются контактным элементом 164 в результате приложения к этим элементам вакуума через отверстия 169 в несущем элементе.
При этом отверстия 129, находящиеся в первой зоне 133 несущего элемента 127, вращаются в положении, согласованном с положением овальных отверстий 126, выполненных в прорезанном сегменте 122 внутреннего цилиндра 111 приемного валика 110. Поскольку овальные отверстия 126 сообщаются с находящейся под повышенным давлением удлиненной полостью 128, сжатый воздух выходит из удлиненной полости через овальные отверстия 126 и через отверстия 129 в несущем элементе 127 наружного цилиндра 112 и вступает в контакт с первой частью 571 тренировочных трусиков 500. Сжатый воздух способствует переносу первой части 571 трусиков 500 от первой зоны 133 несущего элемента 127 наружного цилиндра 112 приемного валика на контактный элемент 164 осциллирующего компонента 150.
Таким образом, первая часть 571 тренировочных трусиков 500 переносится на контактный элемент 164 наружного цилиндра 152 осциллирующего компонента 150 при вращении, посредством узла 157 привода осциллирующего компонента, наружного цилиндра (и, следовательно, его контактного элемента) относительно приемного валика 110. Как показано на фиг.45 и 46, наружный цилиндр 152 осциллирующего компонента 150 движется по часовой стрелке (т.е. во втором направлении, противоположном направлению вращения наружного цилиндра 112 приемного валика 110). При этом при переносе первой части 571 тренировочных трусиков 500 с приемного валика 110 на осциллирующий компонент 150 наружный цилиндр 152 осциллирующего компонента 150 вращается примерно с той же поверхностной скоростью, что и наружный цилиндр 112 приемного валика 110.
При движении наружного цилиндра 112 над прорезанным сегментом 122 внутреннего цилиндра 111 вторая часть 572 тренировочных трусиков 500 продолжает удерживаться на приемном валике 110, поскольку отверстия 129 во второй зоне 135 несущего элемента 127 согласованы (совмещены) с прорезями 123 в прорезанном сегменте. В результате вакуум продолжает прикладываться ко второй части 572 тренировочных трусиков 500, удерживая их на несущем элементе 127 наружного цилиндра 112 приемного валика 110.
В тот момент, когда передняя кромка 527 тренировочных трусиков 500 переносится с приемного валика 110 на осциллирующий компонент 150 (или вскоре после этого), наружный цилиндр 152 осциллирующего компонента начинает замедляться. Более конкретно, узел 157 привода осциллирующего компонента 150 уменьшает поверхностную скорость, с которой наружный цилиндр 152 осциллирующего компонента вращается относительно приемного валика 110. После того как наружный цилиндр 152 осциллирующего компонента 150 повернется на заданный угол по часовой стрелке, он останавливается и начинает вращаться в противоположном направлении (т.е. против часовой стрелки). В проиллюстрированном варианте наружный цилиндр 152 осциллирующего компонента 150 совершает, по существу, маятниковое движение в пределах 180°. Другими словами, наружный цилиндр 152 осциллирующего компонента 150 совершает примерно пол-оборота по часовой стрелке, останавливается, а затем движется обратно, против часовой стрелки, к своему исходному положению.
В результате замедления, остановки и изменения направления вращения наружного цилиндра 152 осциллирующего компонента 150 относительно наружного цилиндра 112 приемного валика 110, который движется с постоянной поверхностной скоростью, тренировочные трусики 500 начинают складываться (фиг.47).
Когда наружный цилиндр 152 осциллирующего компонента 150 останавливается или начинает вращаться против часовой стрелки, исполнительный привод 168 осциллирующего компонента 150 приводится в действие подачей на него требуемого тока, обеспечивая поступательное перемещение внутреннего цилиндра относительно наружного цилиндра 152, как это проиллюстрировано фиг.21 и 22. Поскольку это происходит, когда отверстия 169 в контактном элементе 164 осциллирующего компонента 150 согласованы (совмещены) с более широкими частями прорезей 163 в прорезанном сегменте 162 (т.е. с частями прорезей 163, имеющими большую ширину W1), первая часть 571 тренировочных трусиков 500 остается надежно удерживаемой посредством вакуума на контактном элементе 164. Как показано на фиг.21, отверстия 169 в контактном элементе 164 остаются сообщающимися с вакуумом, прикладываемым к внутренней камере 153 через более широкие части прорезей 163.
При вращении наружного цилиндра 152 осциллирующего компонента 150 против часовой стрелки отверстия 169 в контактном элементе 164 смещаются от зоны прорезанного сегмента 162 с более широкими частями прорезей 163 к зоне с более узкими частями. Поскольку отверстия 169 в контактном элементе 164 не согласованы с узкими частями прорезей 163, вакуум, прилагаемый к внутренней камере 153, блокируется внутренним цилиндром и поэтому не может достигать первой части 571 тренировочных трусиков 500 через отверстия 169 в контактном элементе 164. Другими словами, первая часть 571 тренировочных трусиков 500 освобождается от действия вакуума в осциллирующем компоненте 150.
Как уже упоминалось, наружный цилиндр 152 осциллирующего компонента 150 вращается по часовой стрелке в пределах примерно пол-оборота, останавливается, а затем вращается в обратном направлении, против часовой стрелки, возвращаясь к исходному положению. Исполнительный привод 168 в проиллюстрированном варианте сконфигурирован с возможностью находиться в исходном (нормальном) положении, когда наружный цилиндр 152 вращается по часовой стрелке, и в своем активированном положении, когда этот цилиндр вращается против часовой стрелки. В результате внутренний цилиндр 151 находится в своем первом положении, когда наружный цилиндр 152 вращается по часовой стрелке, и во втором положении, когда наружный цилиндр вращается против часовой стрелки. Должно быть понятно, что положение внутреннего цилиндра 151 может быть изменено (т.е. исполнительный привод 168 активирован или деактивирован), когда наружный цилиндр 152 остановлен или вращается.
Когда наружный цилиндр 152 осциллирующего компонента 150 вращается против часовой стрелки, первая часть 571 тренировочных трусиков 500 вступает во втором зазоре, образованном осциллирующим компонентом и фальцевальным валиком (фиг.47), в контакт с контактным элементом 186 наружного цилиндра 172 фальцевального валика 170. Наружный цилиндр 172 фальцевального валика 170 вращается, по существу, с той же поверхностной скоростью, что и наружный цилиндр 152 осциллирующего компонента 150, но в противоположном направлении (т.е. по часовой стрелке). Поверхностные скорости вращения наружных цилиндров 152, 172 осциллирующего компонента 150 и фальцевального валика 170 в этот момент процесса фальцовки меньше, чем поверхностная скорость вращения наружного цилиндра 112 приемного валика 110. В результате вторая часть 572 тренировочных трусиков 500 движется быстрее, чем их первая часть 571.
Поскольку вакуум, прикладывавшийся осциллирующим компонентом 150 к первым застежкам 582 и к переднему эластичному компоненту 554 тренировочных трусиков 500, заблокирован внутренним цилиндром 151, первая часть 571 тренировочных трусиков переносится с контактного элемента 164 осциллирующего компонента на контактный элемент 186 наружного цилиндра 172 фальцевального валика 170 (фиг.48). Основной и дополнительные вырезы 180, 182 во внутреннем цилиндре 171 фальцевального валика 170, по существу, совмещены с отверстиями 188 в контактном элементе 186 наружного цилиндра 172 фальцевального валика. Как следствие, первая часть тренировочных трусиков 500 находится под действием вакуума, приложенного к внутренней камере 173 внутреннего цилиндра. В результате первая часть 571 тренировочных трусиков 500 переносится во втором зазоре, образованном контактным элементом наружного цилиндра фальцевального валика и контактным элементом 164 наружного цилиндра 152 осциллирующего компонента 150 (фиг.48), на контактный элемент 186 наружного цилиндра 172 фальцевального валика 170.
После того как первая часть 571 тренировочных трусиков 500 будет перенесена с осциллирующего компонента 150 на фальцевальный валик 170, узел 176 привода увеличивает поверхностную скорость вращения наружного цилиндра 172 фальцевального валика 170, по существу, до совпадения с поверхностной скоростью вращения наружного цилиндра 112 приемного валика 110. Как проиллюстрировано на фиг.48 и 49, наружный цилиндр 172 фальцевального валика 170 вращается по часовой стрелке, т.е. противоположно вращению (против часовой стрелки) наружного цилиндра 112 приемного валика 110. Первая часть 571 тренировочных трусиков 500 снова приводится во взаимодействие с несущим элементом 127 наружного цилиндра 112 приемного валика 110 в третьем зазоре, образованном между фальцевальным валиком 170 и приемным валиком 110. В результате первая часть 571 тренировочных трусиков оказывается наложенной на вторую часть 572 (фиг.49). Кроме того, каждая первая застежка 582 сцепляется с соответствующей ей второй застежкой 584.
Основной и дополнительные вырезы 180, 182 во внутреннем цилиндре 171 фальцевального валика 170 заканчиваются вблизи третьего зазора. В результате вакуум, удерживавший первую часть 571 тренировочных трусиков 500 на контактном элементе 186 фальцевального валика 170, блокируется. Как следствие, первая часть 571 тренировочных трусиков 500 переносится обратно на приемный валик 110, и тренировочные трусики оказываются в сфальцованной конфигурации. При этом относительное вращение фальцевального валика 170 и приемного валика 110 прикладывает к первой и второй застежкам 582, 584 сжимающее и сдвиговое усилия, надежно сцепляя тем самым первую и вторую застежки.
После этого тренировочные трусики 500, находящиеся в сфальцованной конфигурации и со сцепленными первыми и вторыми застежками 582, 584, переносятся в четвертом зазоре, образованном между приемным и переносящим валиками (фиг.49 и 50), с приемного валика 110 на переносящий валик 190. Наружный цилиндр 112 приемного валика 110 продолжает вращаться против часовой стрелки с постоянной поверхностной скоростью. Наружный цилиндр 192 переносящего валика 190 вращается примерно с той же поверхностной скоростью, что и наружный цилиндр 112 приемного валика 110, но по часовой стрелке.
Переход от прорезанного сегмента 122 к сплошному сегменту 121 внутреннего цилиндра 111 приемного валика 110, по существу, пространственно согласован с четвертым зазором, образованным между приемным валиком и переносящим валиком 190. В результате отверстия 129 в несущем элементе 127 блокируются от источника вакуума сплошным сегментом 121 внутреннего цилиндра 111, что исключает приложение вакуума к тренировочным трусикам 500, которые в этом месте уже не испытывают воздействия со стороны вакуума в приемном валике 110.
Передние кромки основного и дополнительных вырезов 202, 204 во внутреннем цилиндре 191 переносящего валика 190, по существу, пространственно согласованы с четвертым зазором, образованным приемным и переносящим валиками. Поэтому, когда отверстия 208 проходят через четвертый зазор, вакуум, прикладываемый к внутренней камере 193 внутреннего цилиндра 191 переносящего валика 190, переносится к отверстиям в несущем элементе наружного цилиндра 192 этого валика. В результате наружный цилиндр 192 переносящего валика 190 захватывает тренировочные трусики 500 и переносит их с приемного валика 110 на переносящий валик. Трусики 500, находящиеся в своей сфальцованной конфигурации, по существу, пространственно согласованы с профилем (т.е. с расположением) отверстий 208 в несущем элементе 206 наружного цилиндра 192. Соответственно, тренировочные трусики 500 целиком, с надежно сцепленными застежками 582, 584, удерживаются в правильном положении на переносящем валике 190.
Как показано на фиг.1, переносящий валик 190 доставляет тренировочные трусики 500 ко второму транспортирующему компоненту 105 и переносит их на него, после чего этот компонент транспортирует их к дополнительным компонентам системы 50 изготовления. В проиллюстрированном варианте второй транспортирующий компонент 105 является вакуумным ленточным конвейером. Специалистам хорошо известны и другие устройства, пригодные для использования в качестве второго транспортирующего компонента 105. Они включают (не ограничиваясь ими) барабаны, ролики, ленточные конвейеры, пневмоконвейеры, вакуумные конвейеры, лотки и т.д.
В одном эффективном варианте тренировочные трусики 500 могут изготавливаться с высокой производительностью (составляющей, например, 400 изделий в минуту (и./м) или выше, например от 400 до 4000 и./м или от 600 до 3000 и./м, или от 900 до 1500 и./м). В варианте, проиллюстрированном на фиг.1, тренировочные трусики 500 могут изготавливаться с производительностью примерно 1000 и./м. Каждый из представленных фальцевальных аппаратов 100 способен фальцевать трусики с производительностью примерно 500 и./м. В другом варианте, использующем только один фальцевальный аппарат, тренировочные трусики 500 также могут изготавливаться с высокой производительностью (500 и./м). Должно быть понятно, что при введении дополнительного фальцевального аппарата 100 производительность описанной системы 50 изготовления может быть сделана превышающей 1000 и./м.
Как уже упоминалось, наружные цилиндры 112, 192 приемного валика 110 и переносящего валика 190 вращаются с постоянной скоростью, а наружные цилиндры 152, 172 осциллирующего компонента 150 и фальцевального валика 170 в процессе работы фальцевального аппарата 100 вращаются с варьируемыми скоростями.
На фиг.51 представлен график, иллюстрирующий эффективный вариант профилей относительных скоростей приемного валика 110, осциллирующего компонента 150 и фальцевального валика 170. На фиг.52(a)-52(f) схематично иллюстрируются профили скоростей по фиг.51 в шести различных точках профиля. Как показано на фиг.51, профиль скорости для приемного валика 110 является постоянным и соответствующим первому направлению. Профиль скорости для осциллирующего компонента 150 начинается в положении его остановки; затем скорость увеличивается до достижения скорости приемного валика 110. После того как скорости приемного валика 110 и осциллирующего компонента 150 станут примерно одинаковыми, первая часть 571 тренировочных трусиков 500 переносится с приемного валика на осциллирующий компонент.
После того как первая часть 571 тренировочных трусиков 500 будет принята осциллирующим компонентом 150, он замедляется и подходит к положению остановки. После короткой остановки осциллирующий компонент ускоряется в противоположном направлении примерно в таком же темпе, что и фальцевальный валик 170, и в это время первая часть 571 тренировочных трусиков 500 переносится с осциллирующего компонента на фальцевальный валик. По завершении переноса этой части с осциллирующего компонента 150 осциллирующий компонент замедляется до прихода в положение остановки, после чего профиль его скорости повторяется.
Как показано на фиг.51, профиль скорости фальцевального валика 170 начинается с вращения этого валика с постоянной скоростью, которая затем уменьшается до положения остановки. Из этого положения фальцевальный валик 170 и осциллирующий компонент 150 ускоряются, по существу, в одинаковом темпе, и в это время первая часть 571 тренировочных трусиков 500 переносится с осциллирующего компонента на фальцевальный валик. Фальцевальный валик 170 продолжает ускоряться, при этом первая часть 571 тренировочных трусиков 500 удерживается на нем до достижения этим валиком постоянной скорости. Постоянная скорость фальцевального валика, по существу, такая же, как у приемного валика 110, но имеет противоположное направление. После того как фальцевальный валик достигнет постоянной скорости, первая часть 571 переносится с него на приемный валик 110. После этого профиль скорости фальцевального валика 170 повторяется.
Профиль скорости переносящего валика 190 (не изображенный на фиг.51), по существу, такой же, как профиль скорости для приемного валика 110, но имеет противоположное направление. Должно быть, однако, понятно, что профили скоростей переносящего валика 190 и приемного валика 110 могут быть различными.
Одна эффективная конфигурация аппарата 100 проиллюстрирована на фиг.53 и 54. Более конкретно, фиг.53 и 54 иллюстрируют вариант относительного позиционирования приемного валика 110, осциллирующего компонента 150 и фальцевального валика 170. Можно видеть, что радиусы приемного валика 110, осциллирующего компонента 150 и фальцевального валика 170 обозначены, как R1, R2 и R3 соответственно. Предусматривается, что система может иметь и конфигурации, отличные от проиллюстрированной.
При заданных радиусах R1, R2 и R3 приемного валика 110, осциллирующего компонента 150 и фальцевального валика 170, можно, используя следующие уравнения, рассчитать углы θ, β, γ между линиями, соединяющими центры приемного валика, осциллирующего компонента и фальцевального валика.
Уравнение для линии, проходящей через центр осциллирующего компонента 150 и имеющей наклон mγ:

Уравнение для линии, проходящей через центр фальцевального валика 170 и имеющей наклон mβ:

Уравнение для окружности с центром в начале координат, проходящей через центр приемного валика 110:

Уравнение для окружности с центром на фальцевальном валике 170, проходящей через центр приемного валика 110:

Исключив y2 из (4), используя (3), и решив его для x, можно найти x1, положение центра конвейера по координате x:







Профили движения для приемного валика 110, осциллирующего компонента 150 и фальцевального валика 170 можно рассчитать, используя приводимые далее уравнения. В описанной системе 50 имеются 10 точек перехода, обозначенные на фиг.55, как b1-b10.
Длина окружности фальцевального валика 170: один оборот фальцевального валика 170 соответствует N изделиям:

Согласование концов сфальцованного изделия: передний конец изделия достигает точки касания (ТК) одновременно с его задним концом:

где βpuck - угловой размер (центральный угол) контактного элемента фальцевального валика.
Скорость средней точки изделия и фальцевального валика: средняя точка изделия на приемном валике 110 находится за ТК, b6f повторяется в момент, когда фальцевальный валик 170 достигает скорости конвейера в точке b6:

Угол поворота приемного валика 110: приемный валик 110 поворачивается на угол θ° плюс угол, соответствующий длине дуги, равной Lp:

Равные углы поворота контактного элемента: угол поворота контактного элемента по часовой стрелке равен его углу поворота в противоположном направлении:

Ограничение на угол наклона для контактного элемента: завершающий угол наклона для контактного элемента равен начальному углу наклона:

Точка, в которой несущий элемент достигает скорости конвейера: свободный выбор значения b1:

Угол поворота контактного элемента осциллирующего компонента в прямом направлении: контактный элемент поворачивается на угол γ плюс угол γpuck, соответствующий его угловому размеру:

Согласование данного контактного элемента с приемным валиком: контактный элемент движется вместе с приемным валиком 110 в пределах дуги, соответствующей длине контактного элемента:

Контактный элемент начинает ускоряться: свободный выбор значения b10:

Перевод данных уравнений, задающих ограничения, в матричную форму дает:


Решение приведенной системы уравнений для bi может быть найдено с помощью исключения методом Гаусса или обращения матрицы. Решение методом обращения матрицы имеет следующий вид:
В=А-1×·С
Рассмотрим фальцевальный аппарат со следующими параметрами:
Q=1000 и./мин
Vp=546,1 мм/об.
длина контактного элемента Lpuck=116,2 мм
R1=173,829 мм
R2=98,784 мм
R3=127,838 мм
N=2 фальцаппарата
z=0,3
y=0
b6f=0,15
Приведенные параметры дают следующие значения центральных углов:
γ=73,70°
β=60,16°
θ=46,14°.
Центральные углы контактного элемента фальцевального валика (βpuck) и контактного элемента осциллирующего компонента (γpuck):
βpuck=52,09°
γpuck=67,41°
Решение задачи синхронизации для данной системы таково:
b1=0,3
b2=0,512811236
b3=0,148030752
b4=0,978191662
b5=0,989163963
b6=1,206339397
b7=1,556339397
b8=1,54325313
b9=1,84325313
b10=0
Другие аппараты, пригодные для удерживания, контроля, переноса, фальцевания, сматывания и/или выполнения иных операций с мягкими материалами и изделиями (включая тренировочные трусики) описаны в патентной заявке США №12/971,999, озаглавленной ″ФАЛЬЦЕВАЛЬНЫЙ АППАРАТ И СПОСОБ ФАЛЬЦЕВАНИЯ ПРОДУКТА″; в патентной заявке США №12/972,037, озаглавленной ″ФАЛЬЦЕВАЛЬНОЕ УСТРОЙСТВО, СОДЕРЖАЩЕЕ ВАЛИКИ С ПЕРЕМЕННОЙ ОКРУЖНОЙ СКОРОСТЬЮ, И СПОСОБ ФАЛЬЦЕВАНИЯ ПРОДУКТА″, и в патентной заявке США №12/972,082, озаглавленной ″ВАКУУМНЫЙ ВАЛИК И СПОСОБ ЕГО ИСПОЛЬЗОВАНИЯ″. Содержание каждой из этих заявок полностью включено в данное описание посредством ссылки.
Термины ″содержащий″, ″включающий″ и ″имеющий″, использованные при описании элементов изобретения и предпочтительных вариантов, подразумевают, что, кроме перечисленных элементов, могут дополнительно присутствовать и иные компоненты.
Не выходя за пределы изобретения, в него могут быть внесены различные изменения. При этом предусматривается, что все варианты, рассмотренные в описании и проиллюстрированные на прилагаемых чертежах, приведены только в иллюстративных целях и не вносят каких-либо ограничений.
Реферат
Группа изобретений относится к области фальцевания изделий. Аппарат для фальцевания изделия содержит приемный валик, фальцевальный валик и осциллирующий компонент. Приемный валик имеет первое направление вращения и выполнен с возможностью селективно удерживать на себе первую и вторую части изделия. Фальцевальный валик аппарата имеет второе направление вращения. Второе направление вращения противоположно первому направлению вращения. Фальцевальный валик выполнен с возможностью селективно удерживать на себе первую часть изделия. Осциллирующий компонент выполнен с возможностью переносить первую часть изделия с приемного валика на фальцевальный валик. Осциллирующий компонент сконфигурирован с возможностью двигаться в первом и втором направлениях. Обеспечивается высокая воспроизводимость позиционирования на высоких скоростях. 3 н. и 17 з.п. ф-лы, 60 ил., 1 табл.
Формула
приемный валик, имеющий первое направление вращения и выполненный с возможностью селективно удерживать на себе первую и вторую части изделия;
фальцевальный валик, имеющий второе направление вращения, противоположное первому направлению, и выполненный с возможностью селективно удерживать на себе первую часть изделия; и
осциллирующий компонент, выполненный с возможностью переносить первую часть изделия с приемного валика на фальцевальный валик, причем осциллирующий компонент содержит внутренний цилиндр и наружный цилиндр, способный вращаться вокруг внутреннего цилиндра, при этом указанный наружный цилиндр выполнен с возможностью двигаться в обоих, первом и втором, направлениях.
приемный валик, выполненный с возможностью удерживать на себе первую и вторую части изделия и освобождать первую часть при продолжении удерживания второй части изделия, при этом приемный валик сконфигурирован с возможностью вращаться в первом направлении;
осциллирующий компонент, расположенный вблизи приемного валика, причем осциллирующий компонент содержит внутренний цилиндр и наружный цилиндр, способный вращаться вокруг внутреннего цилиндра, при этом указанный наружный цилиндр выполнен с возможностью двигаться в первом и втором направлениях, а осциллирующий компонент выполнен с возможностью принимать первую часть изделия с приемного валика при движении наружного цилиндра во втором направлении; и
фальцевальный валик, расположенный вблизи приемного валика и осциллирующего компонента и выполненный с возможностью вращаться во втором направлении и сконфигурированный для приема первой части изделия от осциллирующего компонента при движении указанного наружного цилиндра в первом направлении и для переноса первой части изделия на приемный валик со складыванием изделия, по существу, вдоль поперечной оси фальцевания и при наложении первой части изделия на вторую часть.
подачу на приемный валик изделия, имеющего первую часть, вторую часть и поперечную ось фальцевания, разделяющую первую и вторую части,
удерживание первой и второй частей изделия на приемном валике при его вращении в первом направлении;
перенос первой части изделия с приемного валика на осциллирующий компонент, содержащий внутренний цилиндр и наружный цилиндр, способный вращаться вокруг внутреннего цилиндра, при движении указанного наружного цилиндра во втором направлении;
изменение направления движения наружного цилиндра со второго на первое направление;
перенос первой части изделия с осциллирующего компонента на фальцевальный валик при движении наружного цилиндра в первом направлении и вращении фальцевального валика во втором направлении; и
перенос первой части изделия с фальцевального валика на приемный валик в положении, в котором первая часть изделия наложена на вторую часть и изделие сложено по поперечной оси фальцевания.
Документы, цитированные в отчёте о поиске
Устройство и способ для загибания полосы материала крылышек гигиенической прокладки
Комментарии