Измерительное устройство и способ эксплуатации измерительного устройства - RU2581326C2
Код документа: RU2581326C2
Чертежи
Описание
Область техники, к которой относится изобретение
Изобретение относится к измерительному устройству согласно п. 1 формулы изобретения для измерения контролируемых изделий во время процесса обработки на обрабатывающем станке, в частности на шлифовальном станке, а также к способу эксплуатации измерительного устройства.
Уровень техники
При изготовлении коленчатых валов необходимо отшлифовывать пальцы кривошипа коленчатого вала под размер на шлифовальном станке. Чтобы гарантировать, что процесс шлифования будет закончен, как только будет достигнут нужный размер, необходимо непрерывно осуществлять проверку пальца кривошипа в рамках процесса измерения во время процесса обработки, в частности в отношении его диаметра и округлости. ЕР-А-0859689 выявляет соответствующее измерительное устройство.
Из ЕР-А-1370391 известно измерительное устройство, которое предназначено для измерения пальцев кривошипа во время процесса шлифования на шлифовальном станке. Известное измерительное устройство имеет измерительную головку, которая через рычажную систему с возможностью осуществления поворотного движения вокруг первой поворотной оси соединена с основным корпусом измерительного устройства. Известное измерительное устройство имеет далее средства для поворота измерительной головки в положение измерения и для отведения ее из положения измерения. Для осуществления процесса измерения на пальце кривошипа измерительная головка посредством предусмотренных для этого средств поворачивается в положение измерения, в котором измерительная головка, к примеру посредством измерительной призмы, прилегает к измеряемому пальцу кривошипа. Во время процесса шлифования палец кривошипа осуществляет орбитальное движение вкруг поворотной оси коленчатого вала. При этом шлифовальный круг остается в контакте с пальцем кривошипа и для этого установлен подвижно радиально оси вращения коленчатого вала. Чтобы гарантировать, что в течение всего процесса шлифования могут производиться измерения на пальце кривошипа, измерительная головка воспроизводит движения пальца кривошипа. Для этого основной корпус измерительного устройства соединен с основным корпусом шлифовального станка, так что измерительное устройство во время процесса шлифования перемещается в радиальном направлении коленчатого вала синхронно со шлифовальным кругом шлифовального станка. Аналогичные измерительные устройства известны также из DE 2009/052254 А1 и из DE 2010013069 А1.
Из ЕР 1263547 В1 известно измерительное устройство соответствующего типа для измерения контролируемых изделий во время процесса обработки на обрабатывающем станке, которое имеет основной корпус и измерительную головку, которая выполнена с возможностью перемещения между исходным положением и положением измерения и соединена с основным корпусом через рычажную систему, которая осуществлена и отрегулирована таким образом, что измерительная головка в положении измерения следует за орбитальными вращениям контролируемого изделия вокруг поворотной оси, причем измерительная головка имеет выполненный с возможностью отклонения вдоль линейной оси измерительный щуп для снятия измеренных значений во время процесса измерения. Известное из данного документа измерительное устройство имеет далее устройством управления для управления процессом измерения, причем измерительное устройство предназначено для измерения диаметра и округлости пальцев кривошипа коленчатого вала во время процесса обработки на шлифовальном станке.
Раскрытие изобретения
В изобретении поставлена задача создания измерительного устройства указанного в пункте 1 формулы изобретения, которое улучшено в отношении точности измерения и надежности.
Эта задача решается посредством изобретения, представленного в пункте 1 формулы изобретения.
В известных измерительных устройствах во время относительного вращения контролируемого изделия, к примеру пальца кривошипа, относительно измерительной головки снимаются измеренные значения, на основании которых математически реконструируется контур конструктивного элемента. Реконструкция может осуществляться посредством итеративного способа, как известно из DE 2009032353 А1. Однако реконструкция может производиться и на базе анализа Фурье, как известно из ЕР 1263547 В1. Вне зависимости от соответствующих использованных способов реконструкции геометрические пропорции измерительного устройства, к примеру, и, в частности, касательно формы измерительной призмы измерительной головки и устройства измерительной головки относительно контролируемого изделия, входят в реконструкцию. В известных измерительных устройствах или при известных способах эксплуатации такого измерительного устройства геометрические пропорции измерительного устройства с точностью используемых допусков конструктивного элемента рассматриваются как заданные.
В основе изобретении лежит идея о том, что отклонения фактических геометрических пропорций от принятых геометрических пропорций оказывают ощутимое воздействие на точность измерений измерительного устройства. Исходя из этого в основе изобретения лежит идея том, чтобы учитывать такие отклонения геометрических пропорций, которые могут появляться за счет допусков конструктивных элементов, а также износа конструктивных элементов измерительного устройства, при обработке результатов или реконструкции.
Кроме того, изобретение предусматривает, что устройство управления отрегулировано и осуществлено таким образом, что измерительное устройство может быть откалибровано в режиме калибровки. Таким образом, в соответствии с изобретением геометрические пропорции измерительного устройства рассматриваются более не как заданные, а учитываются фактические геометрические пропорции посредством калибровки измерительного устройства при обработке результатов или реконструкции контура конструктивных элементов. Так как отклонения принятых геометрических пропорций от фактических геометрических пропорций оказывают существенное воздействие на точность измерения и приводят к ошибкам измерения, в соответствии с изобретением точность измерений измерительных устройств в соответствии с изобретением повышена.
При предпринятой в соответствии с изобретением калибровке учитываются не только вызванные допусками конструктивных элементов отклонения от желаемой геометрии измерительного устройства, но и отклонения, которые выявляются вследствие износа. Это имеет значение, в частности, потому, что у такого рода измерительных устройств, к примеру, измерительная призма измерительной головки при перемещении из исходного положения в положение измерения насаживается на контролируемое изделие со значительным усилием, так что износ заранее запрограммирован. Также отклонения от желаемой геометрии, которые имеют место из-за измененной вследствие износа кинематики соединяющей измерительную головку с основным корпусом рычажной системы, обнаруживаются в результате калибровки в соответствии с изобретением и, таким образом, не могут более оказывать негативного воздействия на точность измерений. Калибровка может производиться в соответствии с изобретением с предварительно заданными временными интервалами или после измерения определенного количества контролируемых изделий. В соответствии с изобретением возможно, однако, также производить калибровку лишь в случае необходимости, или же перед каждым процессом измерения или после него.
Предпочтительный вариант осуществления изобретения предусматривает, что устройство управления осуществлено и отрегулировано для переключения измерительного устройства между режимом измерения, в котором может быть произведен процесс измерения, и режимом калибровки, в котором может быть произведен процесс калибровки. Переключение между режимом измерения и режимом калибровки может производиться при этом полуавтоматически, к примеру с использованием обслуживающего персонала, или полностью автоматически, к примеру перед обработкой контролируемого изделия.
Особо предпочтительный вариант осуществления изобретения предусматривает, что измерительная головка имеет измерительную призму с углом раствора α (первый угол) и осью симметрии, что ориентация линейной оси измерительного щупа относительно оси симметрии измерительной призмы задана посредством второго угла β и что калибровка осуществляется в отношении первого угла α и/или второго угла β. Посредством калибровки измерительного устройства в отношении первого угла α и/или второго угла β уменьшен риск неточности измерений, обусловленных отклонениями заданных геометрических пропорций от фактических геометрических пропорций измерительного устройства, так как допуски конструктивных элементов, а также обусловленные износом геометрические отклонения могут быть обнаружены посредством калибровки в отношении первого угла и второго угла. Если обусловленное износом изменение угла раствора призмы имеет первостепенное значение, то в соответствии с изобретением может быть достаточно произвести калибровку лишь в отношении первого угла α. Если, напротив, первостепенное значение имеет обусловленное допусками конструктивного элемента или износом изменение кинематики соединяющей измерительную головку с основным корпусом рычажной системы, то в соответствии с изобретением может быть достаточно лишь калибровки в отношении угла β. В идеальном варианте калибровка осуществляется, однако, в отношении первого угла α и второго угла β.
Другой особо предпочтительный вариант осуществления изобретения предусматривает, что устройство управления имеет запоминающее устройство, в котором могут сохраняться полученные в процессе калибровки данные калибровки, причем запоминающее устройство находится в соединении с возможностью передачи данных с устройством для обработки данных или может быть подсоединено к нему для осуществления учета данных калибровки при произведении оценки полученных во время процесса измерения измеренных значений. При таком варианте осуществления полученные при калибровке данные калибровки сохраняются в запоминающем устройстве, так что могут быть использованы при обработке результатов измерения и связанной с ней реконструкции контура конструктивного элемента, в частности в отношении диаметра и округлости.
Другой предпочтительный вариант осуществления изобретения предусматривает, что калибровка осуществляется с использованием эталона округлости.
При этом эталон округлости может быть модифицирован в соответствии с изобретением таким образом, что калибровка может осуществляться, в частности, в отношении первого угла α и второго угла β. К тому же, предпочтительный вариант осуществления изобретения предусматривает, что калибровка осуществляется с использованием цилиндра, который в направлении периферии по меньшей мере в одном месте имеет лыску с заданной длиной.
Особенно простой вариант калибровки выявляется тогда, когда калибровка осуществляется с использованием эталонной вставки, как это предусматривает другой предпочтительный вариант осуществления изобретения. Эталонная вставка состоит из (по возможности, идеального в отношении своего кругового контура) цилиндра, который на своей периферии имеет лыску с заданной длиной.
Способ в соответствии с изобретением для эксплуатации предусмотренного для осуществления измерения контролируемых изделий во время процесса обработки на обрабатывающем станке, в частности на шлифовальном станке, измерительного устройства представлен в пункте 8 формулы изобретения. При использовании способа в соответствии с изобретением измерительное устройство посредством устройства управления переводится в режим калибровки и калибруется. В результате этого выявляются те же преимущества, что и у измерительного устройства в соответствии с изобретением. Это относится также к представленным в пунктах 9-14 формулы изобретения предпочтительным и целесообразным вариантам осуществления способа в соответствии с изобретением. Способ в соответствии с изобретением служит, в частности, для эксплуатации измерительного устройства по одному из пунктов 1-7 формулы изобретения.
Краткое описание чертежей
Изобретение поясняется далее более детально на основании приложенных схематичных чертежей, на которых представлен пример осуществления измерительного устройства в соответствии с изобретением. При этом все описанные, представленные на чертежах и использованные в формуле изобретения признаки сами по себе или в любой комбинации друг с другом образуют предмет изобретения, вне зависимости от их формулировки в формуле изобретения и ссылки на них, а также вне зависимости от их описания или изображения на чертежах, на которых представлены:
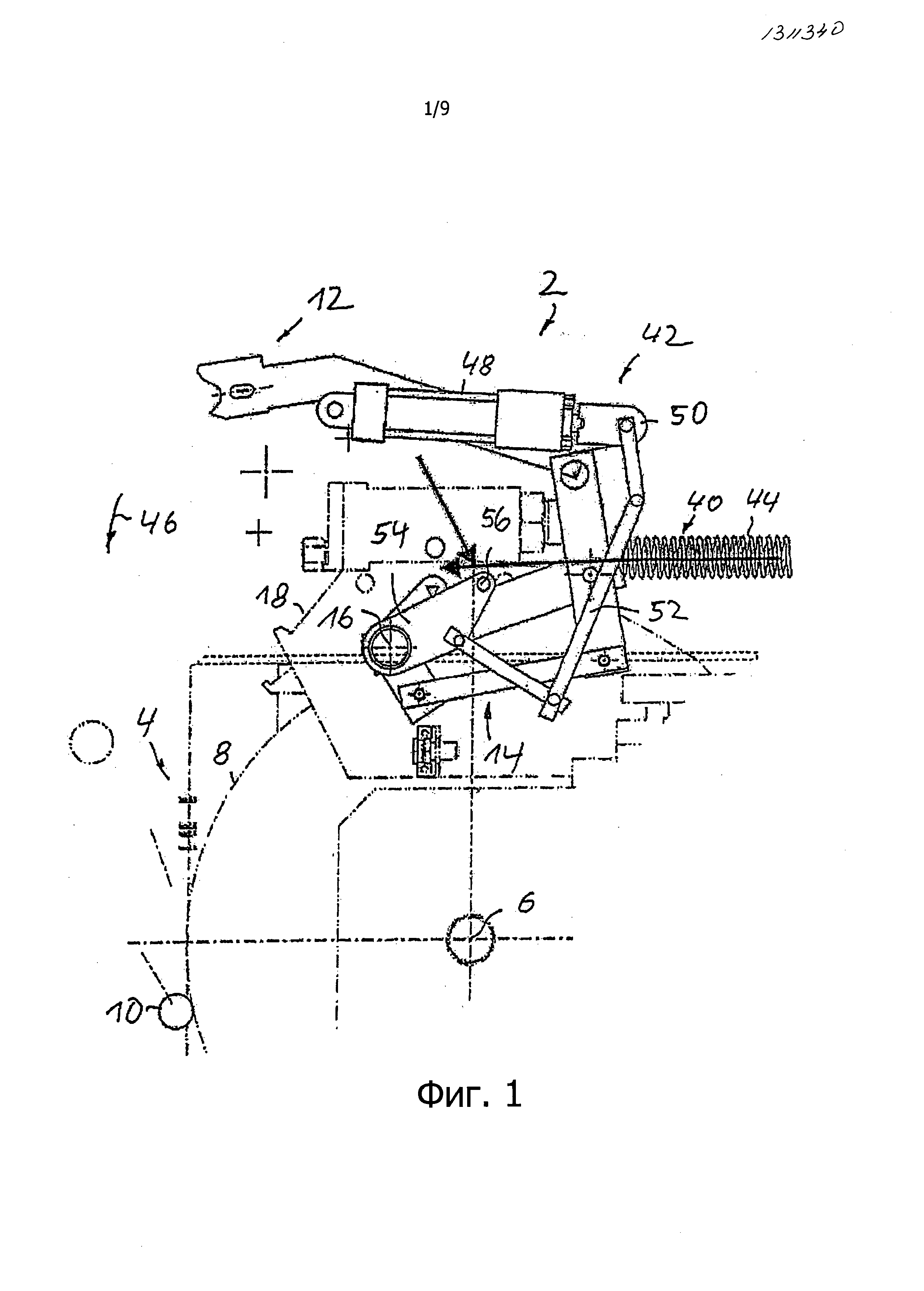
фиг. 1 - в схематичном изображении вид сбоку примера осуществления измерительного устройства в соответствии с изобретением в исходном положении измерительной головки,
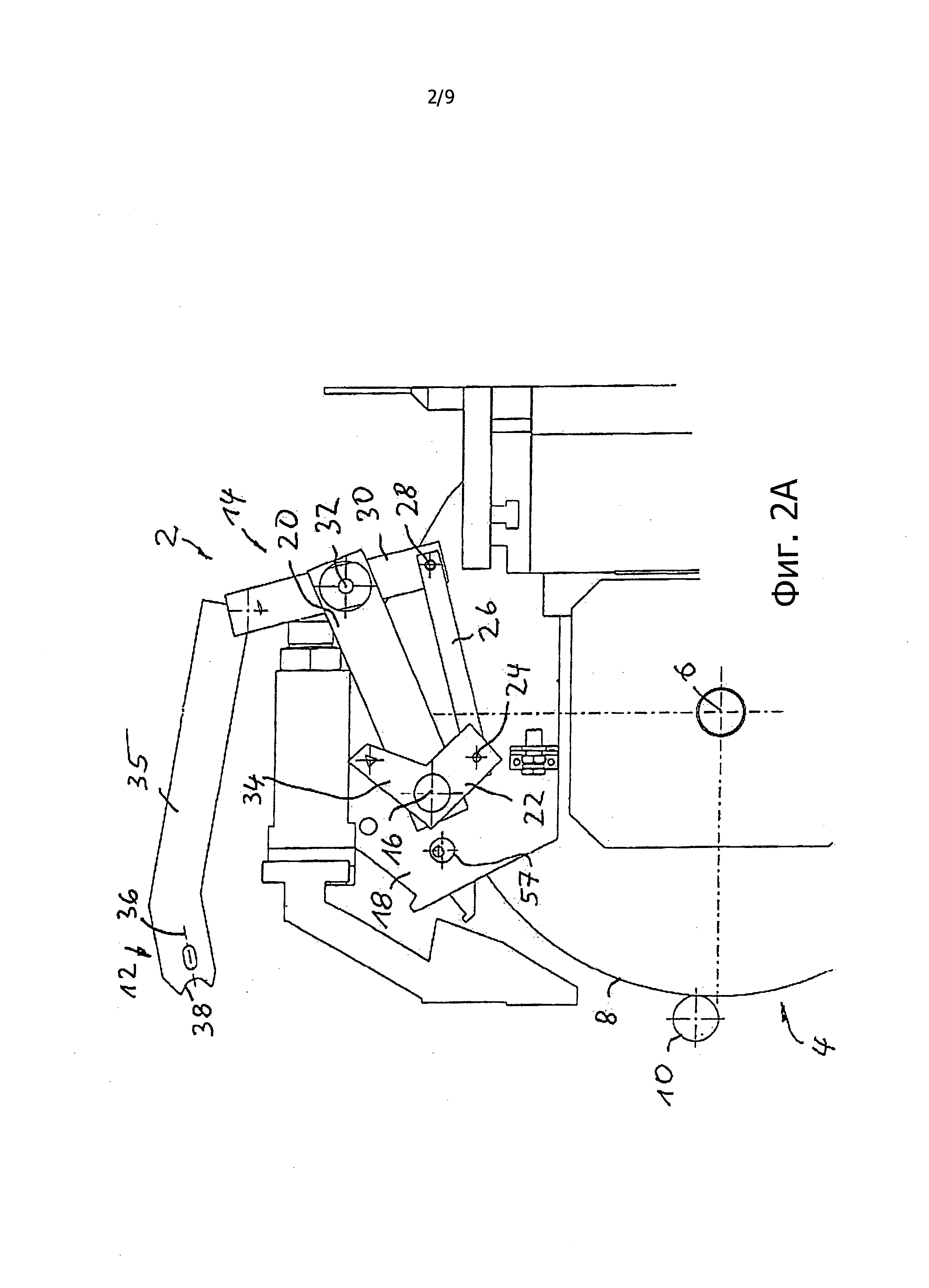
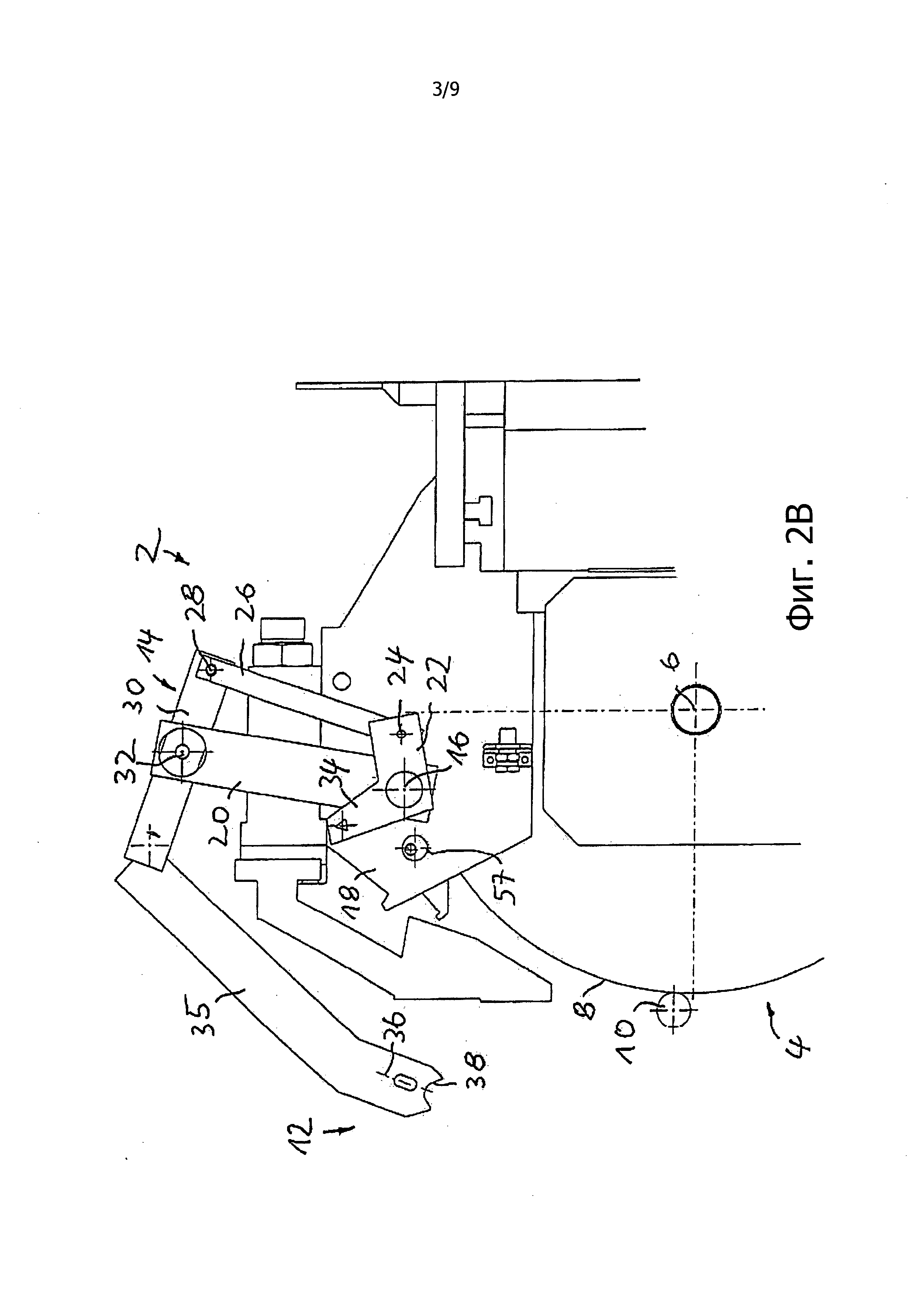
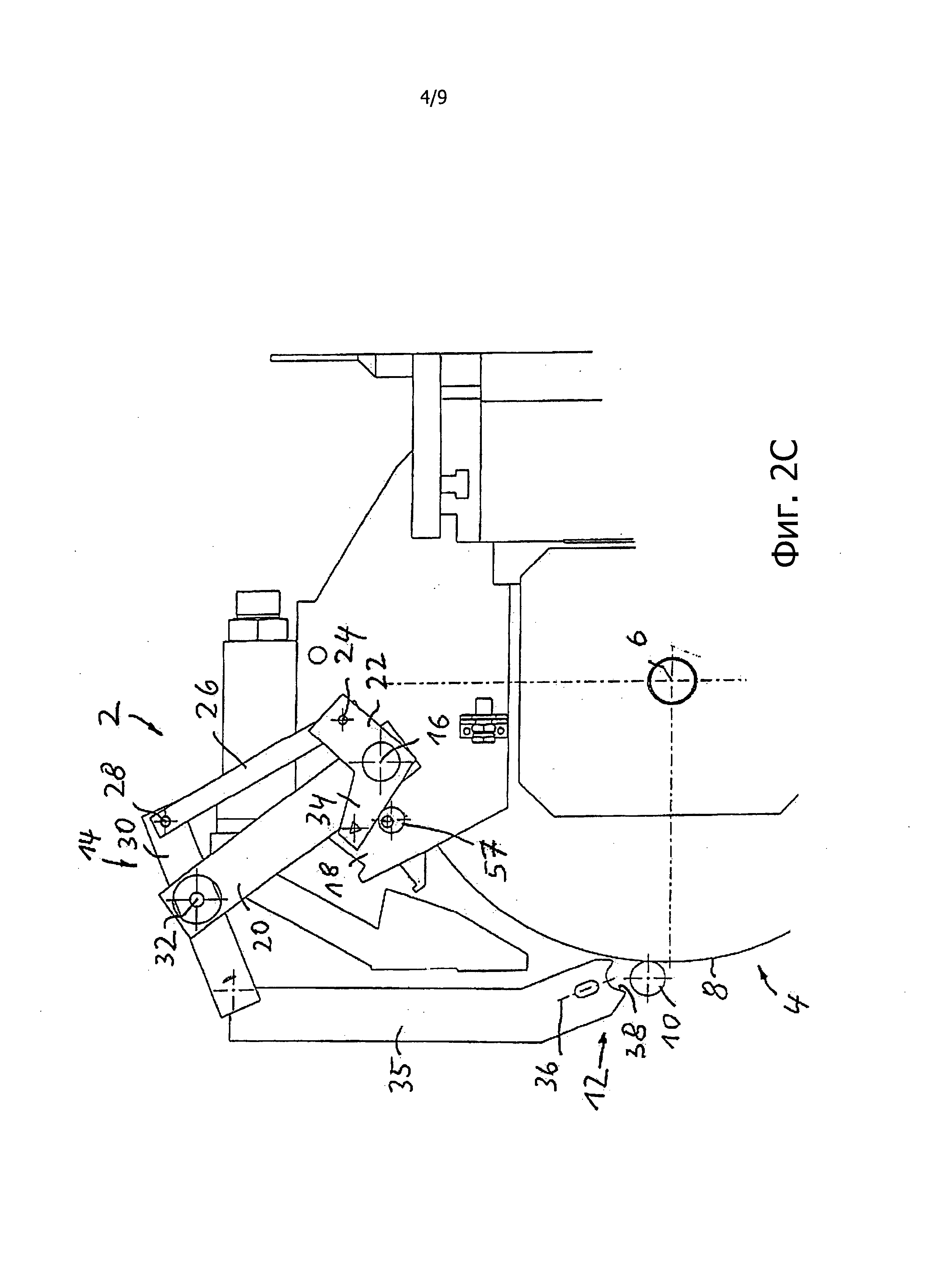
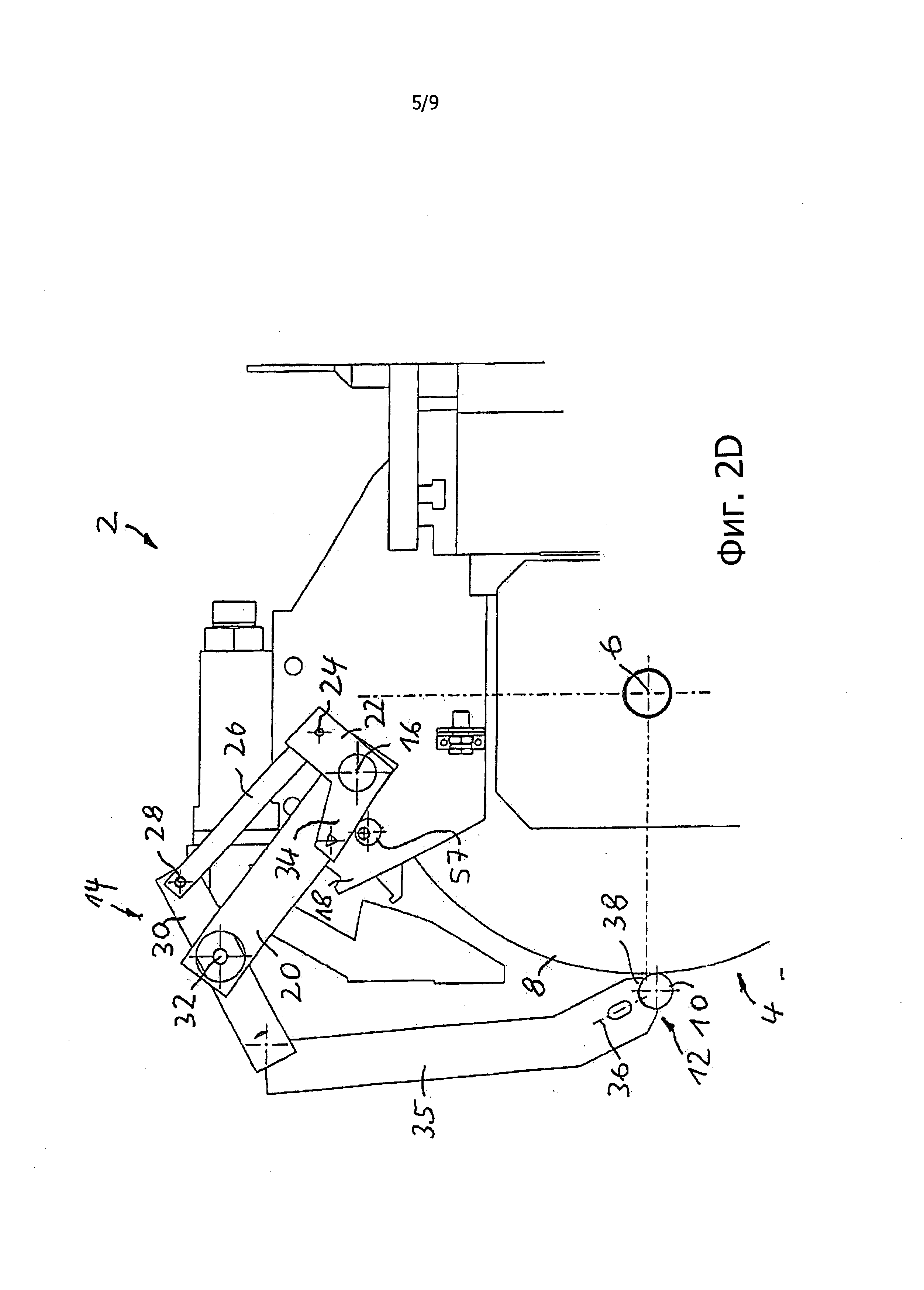
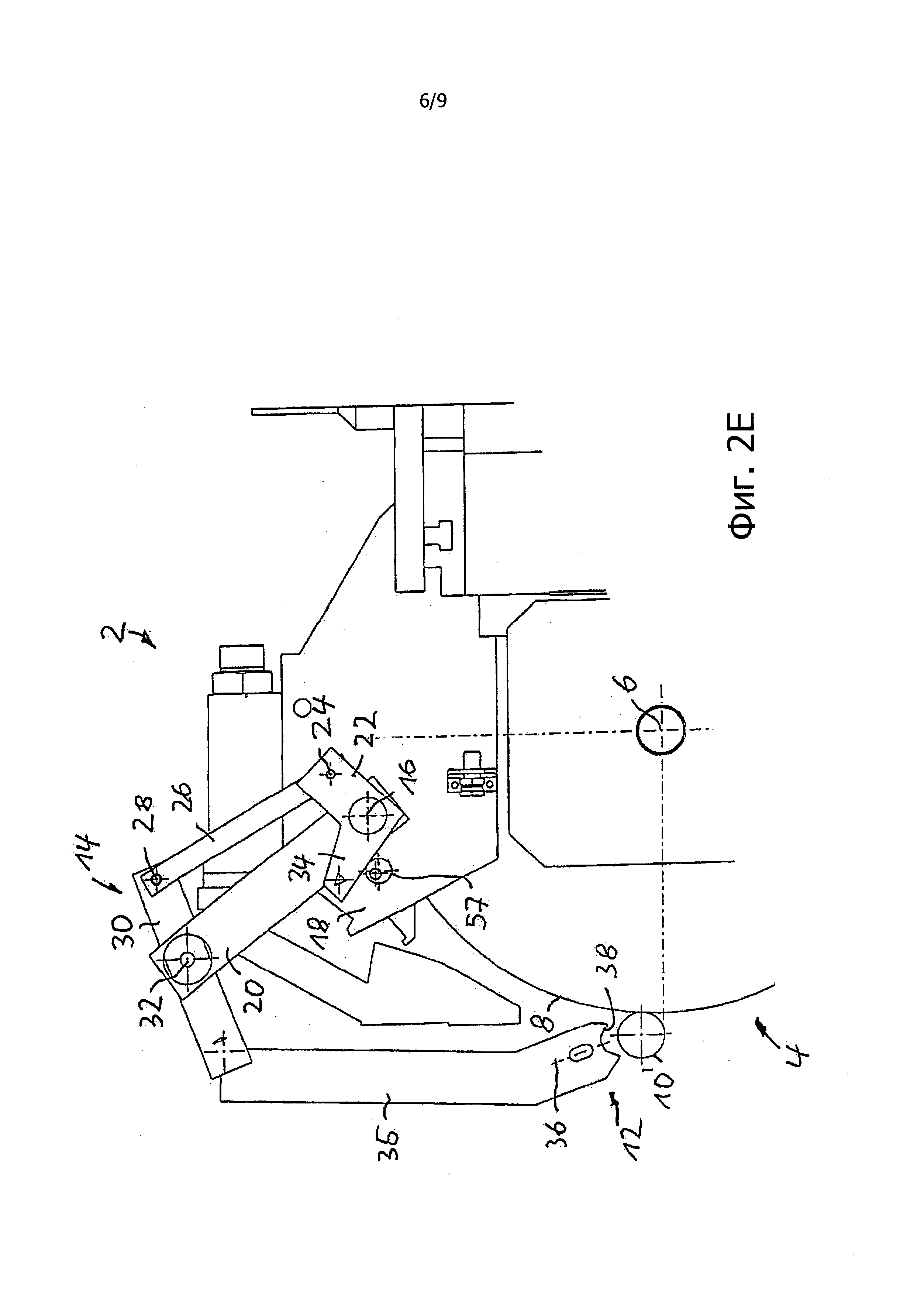
фиг. 2А-2Е - измерительное устройство в соответствии с фиг. 1 в различных кинематических фазах,
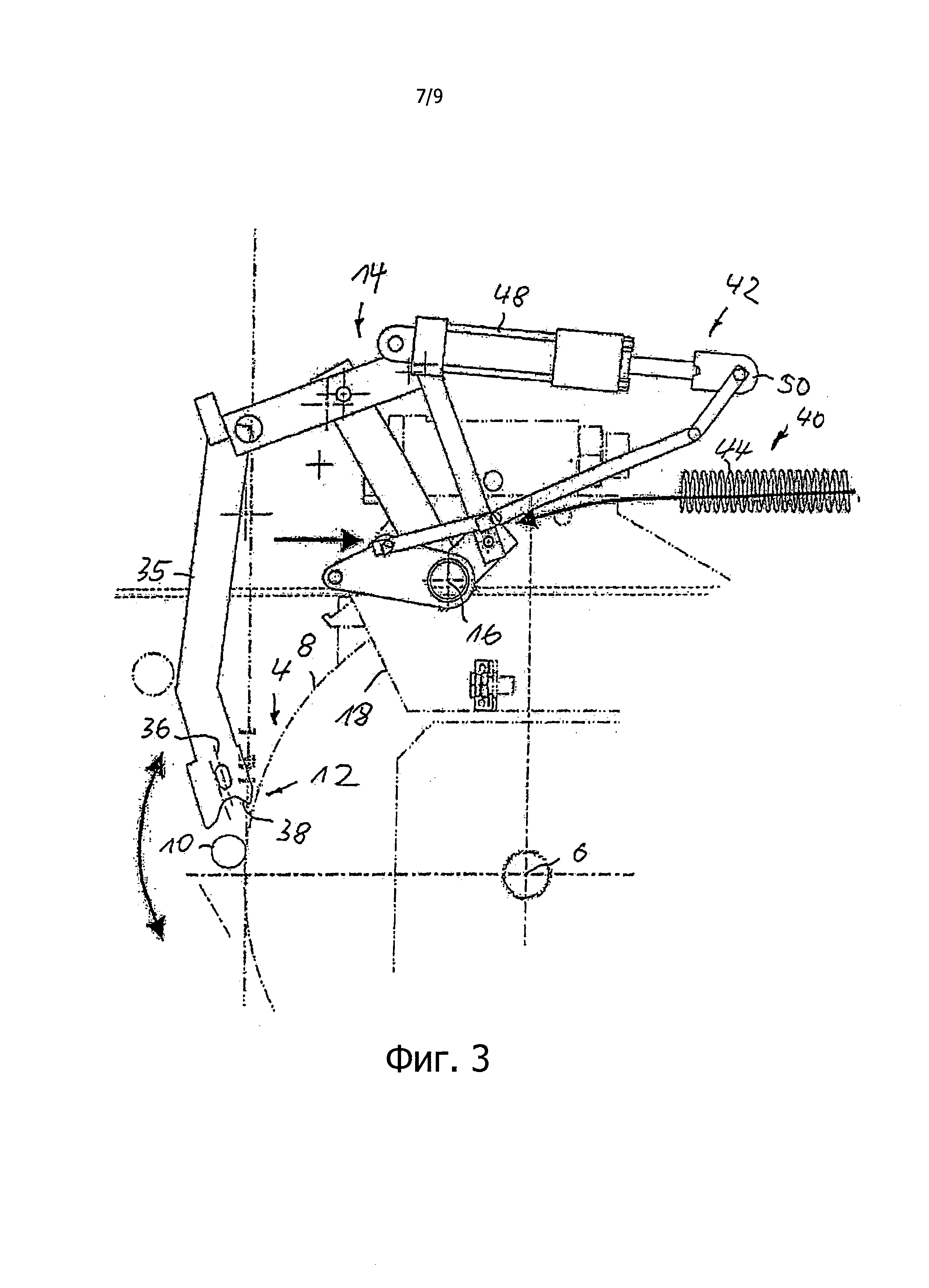
фиг. 3 - в изображении, аналогичном фиг. 1, пример осуществления в соответствии с фиг. 1 во время перемещения измерительной головки в положение измерения,
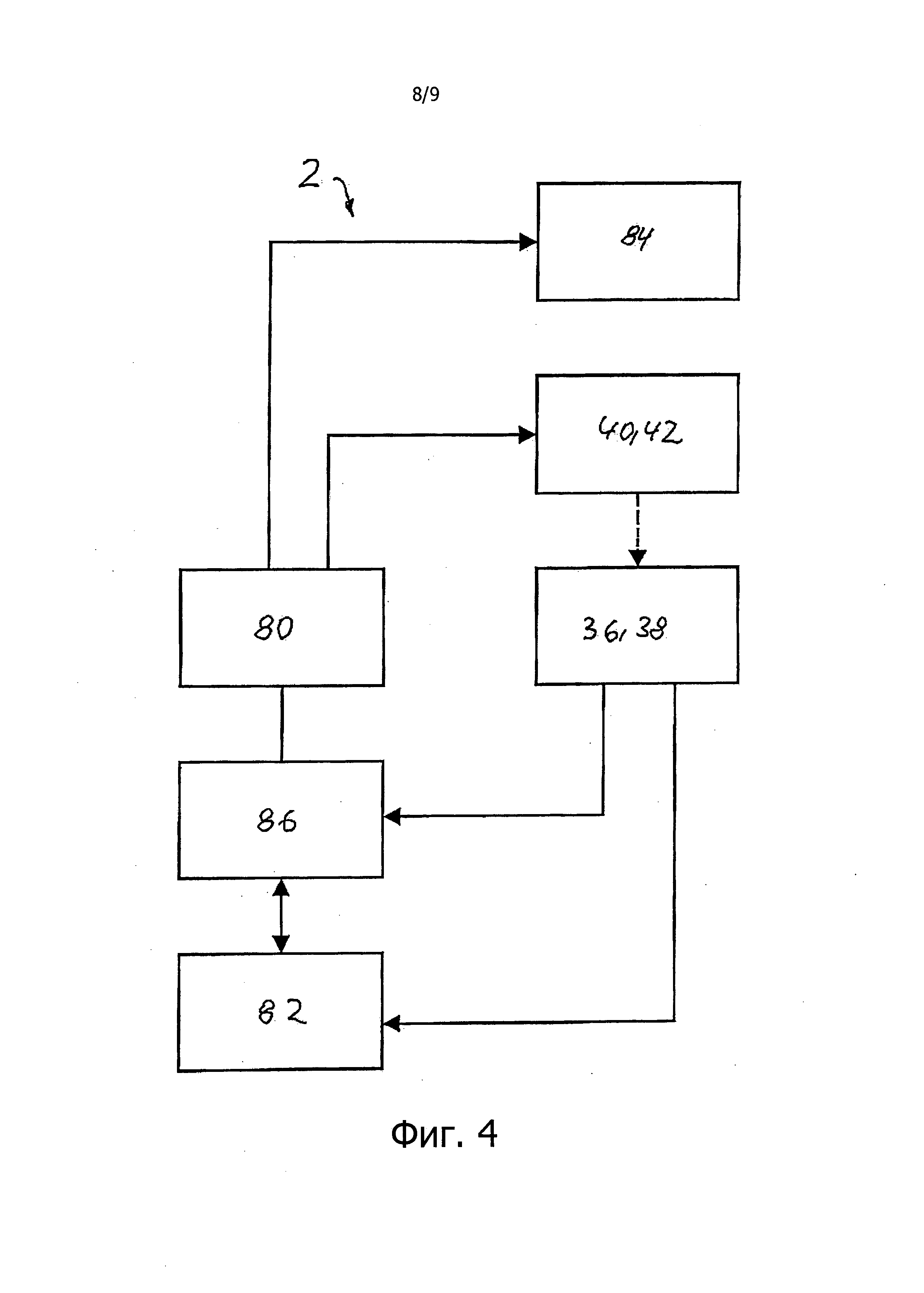
фиг. 4 - изображение в виде блок-схемы элементов измерительного устройства в соответствии с фиг. 1,
фиг. 5 - вид измерительной призмы измерительного устройства в соответствии с фиг. 1 в комбинации с эталонной мерой для пояснения геометрических пропорций,
фиг. 6 - график функции расстояния при калибровке измерительного устройства в соответствии с фиг. 1 с использованием эталонной меры.
Осуществление изобретения
Фиг. 1 демонстрирует пример осуществления измерительного устройства 2 в соответствии с изобретением, которое предназначено для измерения контролируемых изделий в процессе обработки на шлифовальном станке 4. Шлифовальный станок 4, который с целью упрощения чертежа изображен лишь частично, имеет выполненный с возможностью вращения вокруг стационарной относительно машины оси 6 вращения шлифовальный круг 8, который предназначен для обработки контролируемого изделия, которое в данном примере осуществления изобретения представляет собой палец 10 кривошипа коленчатого вала.
Измерительное устройство 2 имеет измерительную головку 12, которая через рычажную систему 14 с возможностью осуществления поворотного движения вокруг первой поворотной оси 16 соединена с основным корпусом 18 измерительного устройства 2.
Измерительное устройство 2 имеет далее средства для поворота измерительной головки 12 в положение измерения и отведения ее из положения измерения, которые далее будут пояснены более детально.
Сначала на основании фиг. 2А будет более детально пояснена конструкция рычажной системы 14. На фиг. 2А-2Е, из соображений наглядности, средства для поворота измерительной головки в положение измерения и отведения ее из положения измерения не изображены. Рычажная система 14 имеет первый элемент 20 рычажной системы и второй элемент 22 рычажной системы, которые располагаются с возможностью осуществления поворотного движения вокруг первой поворотной оси 16. С обращенным от первой поворотной оси 16 концом второго элемента 22 рычажной системы с возможностью осуществления поворотного движения вокруг второй поворотной оси 24 соединен третий элемент 26 рычажной системы, с его обращенным от второй поворотной оси 24 концом с возможностью осуществления поворотного движения вокруг третьей поворотной оси 28 соединен четвертый элемент рычажной системы, который на удалении от третьей поворотной оси 28 с возможностью осуществления поворотного движения вокруг четвертой поворотной оси соединен с первым элементом 20 рычажной системы.
В представленном примере осуществления изобретения первый элемент 20 рычажной системы и третий элемент 26 рычажной системы расположены не параллельно друг другу, причем расстояние между первой поворотной осью 16 и второй поворотной осью 24 меньше расстояния между третьей поворотной осью 28 и четвертной поворотной осью 32.
В представленном примере осуществления изобретения второй элемент 22 рычажной системы имеет такое плечо 34 рычага, что это плечо 34 рычага вместе с элементом 22 рычажной системы образует двуплечий коленчатый рычаг, функциональность которого будет пояснена ниже более детально.
Измерительная головка 12 в данном примере осуществления изобретения расположена на удерживающем рычаге 35, который соединен с четвертым элементом 30 рычажной системы, который удлинен за пределы четвертой поворотной оси 32. В представленном примере осуществления изобретения соединение между удерживающим рычагом 35 и четвертым элементом 30 рычажной системы выполнено неразъемным. Как очевидно на основании фиг. 2А, в представленном примере осуществления изобретения удерживающий измерительную головку 12 свободный конец удерживающего рычага 35 расположен под углом к первой поворотной оси 16, причем соединенная с четвертым элементом 30 рычажной системы часть удерживающего рычага 35 образует с четвертым элементом 30 рычажной системы угол более 90°.
В представленном примере осуществления изобретения измерительная головка 12 имеет выполненный с возможностью линейного отклонения вдоль линейной оси измерительный щуп 36, который на фиг. 2А изображен пунктирной линией. Измерительная головка 12 в представленном примере осуществления изобретения имеет далее измерительную призму 38. Принцип действия в отношении того, как посредством системы из выполненного с возможностью линейного отклонения измерительного щупа 36 и измерительной призмы 38 могут быть произведены измерения округлости и/или габаритов контролируемого изделия, в частности пальца кривошипа коленчатого вала или другого цилиндрического конструктивного элемента, в целом известны специалисту и поэтому не поясняются здесь долее детально.
Измерительное устройство 2 имеет далее средства для перемещения измерительной головки 12 из исходного положения в положение измерения, которые в данном примере осуществления изобретения имеют средства для поворота измерительной головки 12 в положение измерения и для отведения ее из положения измерения, которые воздействуют на рычажную систему 14 и поясняются более детально на основании фиг. 1. В представленном примере осуществления изобретения средства для поворота измерительной головки 12 в положение измерения или отведения ее из положения измерения имеют устройство 40 для поворота в положение измерения и отдельное устройство 42 для отведения из положения измерения.
В представленном примере осуществления изобретения устройство 40 для поворота в положение измерения имеет пружинные средства, которые в данном примере осуществления изобретения имеют осуществленную в виде нажимной пружины пружину 44, которая нагружает измерительную головку 12 через рычажную систему 14 в обозначенном на фиг. 1 посредством стрелки 46 направлении поворота в положение измерения. Пружина 44 в данном примере осуществления изобретения осуществлена в виде нажимной пружины и опирается одним своим концом на основной корпус 18 измерительного устройства 2, а другим своим концом - на плечо 34 рычага, так что пружина 44 нагружает и пытается переместить плечо 34 рычага на фиг. 1 против часовой стрелки и тем самым измерительную головку 12 посредством рычажной системы 14 в направлении 46 поворота в положение измерения.
Устройство 42 для отведения из положения измерения в данном примере осуществления измерения имеет гидравлический цилиндр 48, поршень которого на своем свободном конце соединен с основным корпусом 18 измерительного устройства 2. Со штоком 50 поршня гидравлического цилиндра 48 соединено выполненное в данном примере осуществления изобретения в виде коленчатого рычага рычажное устройство 52, обращенный от штока 50 поршня свободный конец которого эксцентрично относительно первой поворотной оси 16 соединен с одноплечим рычагом 54, который располагается соосно поворотной оси 16. Рычаг 54 имеет на своем свободном конце уходящую вглубь плоскости чертежа цапфу 56, которая слегка нагружает первый элемент 20 рычажной системы, так что рычаг 54 при движении в направлении отведения из положения измерения, которое на чертеже соответствует движению по часовой стрелке, функционирует как захват для первого элемента 20 рычажной системы.
Для обнаружения соответствующего положения измерительной головки 12 предусмотрены сенсорные средства, которые находятся во взаимодействии со средствами для управления устройством 40 для поворота в положение измерения и устройством 42 для отведения из положения измерения.
Обработка измеренных значений, которые регистрируются посредством измерительного щупа 36 во время процесса измерения, осуществляется посредством устройства для обработки данных. Способ, по которому производится оценка соответствующих измеренных значений, в целом известен специалисту и поэтому в данном случае не поясняется более детально.
Принцип действия измерительного устройства 2 в соответствии с изобретением в режиме измерения следующий.
В представленном на фиг. 1 и фиг. 2А исходном положении измерительная головка 12 находится вне контакта с пальцем 10 кривошипа. В этом исходном положении гидравлический цилиндр 48 остановлен, так что движение плеча 34 рычага на фиг. 1 против часовой стрелки, которое пытается привести в действие нажимную пружину 44, блокировано.
Для поворота измерительной головки 12 в положение измерения в направлении 46 гидравлический цилиндр 48 приводится в действие таким образом, что шток 50 его поршня на фиг. 1 отводится вправо. При отведении штока 50 поршня пружина 44 давит на плечо 34 рычага, так что плечо 34 рычага на фиг. 2 поворачивается против часовой стрелки. Так как плечо 34 рычага соединено со вторым элементом 22 рычажной системы без возможности вращения, то при этом второй элемент 22 рычажной системы и тем самым вся рычажная система 14 на фиг. 2 поворачивается против часовой стрелки.
Фиг. 2В демонстрирует измерительную головку 12 в позиции между исходным положением и положением измерения.
При достижении заданного, представленного на фиг. 2С углового положения плечо 34 рычага заходит на упор 57, причем при заходе плеча 34 рычага на упор 57 на устройство управления передается управляющий сигнал, на основании которого гидравлический цилиндр 48 останавливается. Фиг. 2С демонстрирует измерительную головку 12 в положении поиска, в котором она еще не находится в контакте с пальцем 10 кривошипа.
Фиг. 10 демонстрирует измерительную головку 12 в положении измерения, в котором она находится в контакте с пальцем 10 кривошипа.
Фиг. 2Е соответствует фиг. 2С, причем измерительная головка 12 представлена в положении поиска по отношению к пальцу 10′ кривошипа большего диаметра.
Фиг. 3 демонстрирует измерительное устройство 2 в положении поиска измерительной головки 12, которое также представлено на фиг. 2С. Как можно видеть на основании сравнения фиг. 1 и фиг. 3, рычаг 54 посредством рычажного устройства 42 при выдвигании штока 50 поршня гидравлического цилиндра 48 на фиг. 1 поворачивается против часовой стрелки до тех пор, пока не будет достигнуто представленное на фиг. 3 угловое положение рычага 54. Как очевидно на основании фиг. 3, в таком угловом положении цапфа 56 в направлении периферии первой оси 16 вращения располагается на расстоянии от первого элемента 20 рычажной системы, так что первый элемент 20 рычажной системы и тем самым вся рычажная система 14 под действием силы тяжести измерительной головки 12, включая плечо 34 рычага, и созданного пружиной 44 сжимающего усилия, может свободно перемещаться. В положении измерения (см. фиг. 20) измерительная головка 12 прилегает к пальцу 10 кривошипа, причем измерительная головка повторяет орбитальные вращательные движения пальца 10 кривошипа вокруг коленчатого вала во время процесса шлифования. К тому же основной корпус 18 измерительного устройства 2 без возможности смещения соединен с держателем шлифовального круга 8, так что измерительное устройство 2 повторяет поступательные движения шлифовального круга 8 в радиальном направлении оси 6 вращения.
Во время контакта измерительной головки 12 с пальцем 10 кривошипа измерительный щуп 36 снимает измеренные значения, на основании которых в присоединенном к измерительному щупу 36 устройстве обработки данных может быть произведена оценка округлости и/или диаметра пальца кривошипа. Если, к примеру, достигнуто определенное значение диаметра, то шлифовальный круг 8 выводится из зацепления с пальцем 10 кривошипа.
Чтобы по окончании измерения отвести измерительную головку 12 в направлении, обратном направлению 46 поворота в положение измерения, устройство управления регулирует гидравлический цилиндр 48 таким образом, что шток 50 его поршня на фиг. 3 перемещается влево. При этом рычаг 54 посредством рычажного устройства 42 поворачивается на фиг. 3 по часовой стрелке. Пока цапфа 56 в направлении периферии первой поворотной оси 16 располагается на расстоянии от первого элемента 20 рычажной системы, измерительная головка 12 остается в положении измерения. Когда цапфа 56 при последующем повороте рычага 54 на фиг. 3 по часовой стрелке вокруг поворотной оси 16 входит в соприкосновение с первым элементом 20 рычажной системы, то рычаг 54 при последующем повороте по часовой стрелке функционирует как захват и увлекает за собой во вращение первый элемент 20 рычажной системы и тем самым всю рычажную систему 14, так что измерительная головка поворачивается против направления 46 поворота в положение измерения до тех пор, пока не будет достигнуто представленное на фиг. 1 исходное положение.
Во время процесса измерения измерительная головка движется в направлении по часовой стрелке пальца 10 кривошипа с угловым подъемом, который в данном примере осуществления изобретения составляет примерно -7° и +5°, то есть, в целом, 12°.
Затем, на основании фиг. 5, более подробно поясняется, как измерительное устройство в соответствии с изобретением эксплуатируется в режиме калибровки посредством способа в соответствии с изобретением и благодаря этому калибруется.
Фиг. 4 демонстрирует в виде блок-схемы компоненты измерительного устройства 2 в соответствии с изобретением, которые используются при калибровке.
Измерительное устройство 2 в соответствии с изобретением имеет устройство 80 управления, которое осуществлено и отрегулировано таким образом, что измерительное устройство 2 может переключаться между режимом измерения, при котором может производиться процесс измерения, и режимом калибровки, при котором может производиться процесс калибровки. Устройство 80 управления осуществлено и отрегулировано далее для того, чтобы измерительное устройство могло быть откалибровано в режиме калибровки.
Во время процесса измерения измерительный щуп 36 непрерывно снимает измеренные значения, которые подаются на устройство 82 для обработки данных, которое на основании измеренных значений реконструирует профиль контролируемого изделия. Реконструкция может осуществляться, в частности, посредством итеративного способа в соответствии с DE 102009032353 А1. Однако реконструкция может производиться также посредством анализа Фурье в соответствии с ЕР 1263547 В1.
Чтобы калибровать в соответствии с изобретением измерительное устройство 2, устройство 80 управления переключает измерительное устройство 2 из режима измерения в режим калибровки. В режиме калибровки осуществляется калибровка измерительного устройства 2 и притом в представленном примере осуществления изобретения при использовании эталонной вставки, что будет пояснено далее более детально со ссылкой на фиг. 5. В режиме калибровки эталонная вставка сначала зажимается посредством соответствующего зажимного устройства, к которому присоединен привод 84 механизма поворота, так что эталонная вставка может осуществлять вращательные движения относительно измерительной головки 12.
Далее устройство 80 управления настраивает устройство 40 для поворота в положение измерения таким образом, что измерительная головка 12 поворачивается в положение измерения, а измерительная призма 38 и измерительный щуп 36 вводятся в контакт с эталонной вставкой. Затем устройство 80 управления настраивает привод 84 механизма поворота эталонной вставки таким образом, что она вращается относительно измерительного щупа 36.
Во время вращения эталонной вставки относительно измерительного щупа 36 последний ощупывает эталонную вставку. Полученные при этом измеренные значения образуют данные калибровки, на основании которых далее вышеописанным образом производится калибровка измерительного устройства. Данные калибровки записываются в память запоминающего устройства 86 устройства 80 управления, которое с возможностью передачи данных соединено с устройством 82 для обработки данных. После получения данных калибровки устройство 80 управления переключает измерительное устройство 2 обратно в режим измерения. Для этого в действие вводится устройство 42 для отведения из положения измерения, которое затем перемещает измерительную головку 12 из положения измерения обратно в исходное положение. Кроме того, привод 84 механизма поворота останавливается, так что эталонная вставка может быть разжата, а для осуществления процесса измерения на контролируемом изделии это изделие может быть зажато.
Находящиеся в распоряжении устройства 82 для обработки данных данные калибровки учитываются в следующем процессе измерения для калибровки измерительного устройства 2. Калибровка измерительного устройства 2 может осуществляться по потребности, и/или после определенного количества процессов измерения, и/или после определенного времени использования измерительного устройства 2.
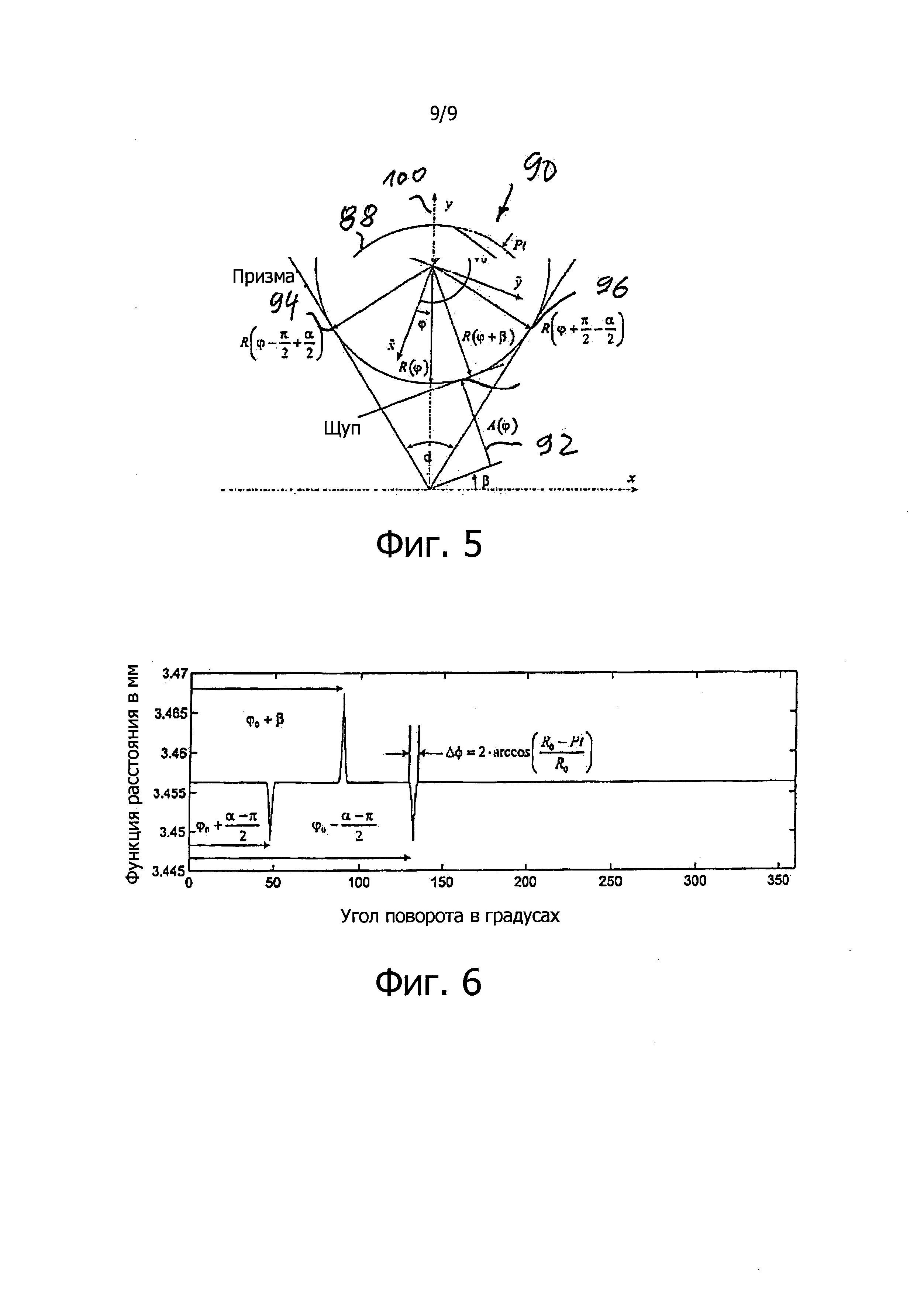
Процесс калибровки поясняется далее более детально со ссылкой на фиг. 5. Фиг. 5 схематично демонстрирует измерительную призму 38 вместе с эталонной вставкой 88.
Под эталонной вставкой 88, в целом, в известном специалисту смысле, понимается идеальный в отношении округлости формы своего контура цилиндр, который на участке 90 периферии имеет лыску заданной длины (глубины) Pt. Фиг. 5 служит для пояснения геометрических пропорций, которые выявляются тогда, когда измерительная призма 38 прилегает к эталонной вставке 88, причем линейная ось измерительного щупа 36 на фиг. 5 обозначена ссылочной позицией 92.
На фиг. 5 можно видеть угол раствора α (первый угол) измерительной призмы 38. Далее можно видеть, что эталонная вставка 88 в двух точках 94, 96 контакта находится в контакте с измерительной призмой 38, в то время как измерительный щуп 36 в точке контакта, находящейся между ними в направлении периферии эталонной вставки 88, находится в контакте с эталонной вставкой 88. Ось симметрии измерительной призмы 38 изображена на фиг. 5 посредством штрихпунктирной линии 100 и образует при дальнейшем рассмотрении ось y правосторонней декартовой системы координат. Линейная ось измерительного щупа 36 проходит под углом β (второй угол) к оси x данной системы координат. В результате, в представленной на фиг. 5 конфигурации выявляются, таким образом, три точки 94, 96, 98 контакта между эталонной вставкой 88 и измерительным устройством 2.
Контур конструктивного элемента мог бы описываться для последующего рассмотрения посредством полярных координат φ и R(φ) в системе координат конструктивного элемента. Измерительный щуп 36 регистрирует расстояние А(φ) в зависимости от угла φ поворота конструктивного элемента в измерительной призме 38. В соответствии с этим отклонения от округлости приводят к характеристической функции расстояния (отклонение измерительного щупа 36) А(φ). Математически в этом случае выявляется следующая взаимосвязь между зависящим от угла контуром R(φ) конструктивного элемента и функцией A(φ) расстояния:

где α - первый угол;
β - второй угол;
φ - угол поворота конструктивного элемента;
R(φ) - радиус конструктивного элемента (контур конструктивного элемента) в зависимости от угла поворота;
А(φ) функция расстояния.
В режиме измерения цель произведенной в устройстве 82 для обработки данных оценки или реконструкции состоит в том, чтобы математически реконструировать контур R(φ) конструктивного элемента из функции А(φ) расстояния. Известные способы реконструкции объединяет то, что углы α и β для реконструкции должны быть известны. Отклонения фактических значений углов α и β от принятых значений данных углов приводят к погрешностям измерений, которые предотвращаются посредством произведенной в соответствии с изобретением калибровки.
Если эталонная вставка 88 в тех зонах, в которых ее контур ограничен кругом, имеет радиус R0, то минимальным радиусом R0 конструктивного элемента является Pt и возникает при угле φ0. При этом предполагается, что лыска эталонной вставки постоянно имеет лишь одну точку контакта с измерительным устройством 2, что, однако, без проблем может быть гарантировано посредством соответствующего выбора размеров лыски 90.
Если эталонная вставка поворачивается на 360°, то имеет место представленная на фиг. 6 характеристика функции. Правила преобразования в соответствии с уравнением (1.1) гарантируют, что пики на фиг. 6 имеют одинаковую форму, правда различные амплитуды. Неизвестные углы могут быть определены, к примеру, посредством идентификации локальных экстремумов или посредством произведения интегральной оценки функции расстояния с помощью преобразования Фурье.
С помощью преобразования Фурье интегральная оценка функции расстояния может быть осуществлена следующим образом.
Вышеописанным образом производится измерение с использованием эталонной вставки. Результатом данного измерения является функция А(φ) расстояния. На основании этого может быть определено серединное значение функции расстояния и апериодическая функция ΔА(φ), которая математически может быть разложена на три подфункции, причем каждая подфункция описывает характеристику относительного движения, соответственно, для одной точки контакта.
Три подфункции могут подвергаться далее преобразованию Фурье. В результате выявляются три Фурье-образа подфункций. Исходя из этого воздействия отклонения ΔR(φ) от формы и угла φ0, при котором начинается измерение, могут быть устранены посредством того, что Фурье-образы обеих функций расстояния, которые описывают правосторонний контакт призмы и левосторонний контакт призы, умножаются на комплексно сопряженный Фурье-образ той функции расстояния, которая описывает контакт со щупом. Результатом являются функции линейной фазы, периоды которых содержат исключительно известные углы α и β. Периоды фазы выявляют в спектре фаз, соответственно, прямую линию, которая проходит через начало координат. Неизвестные подъемы прямой могут быть рассчитаны посредством корректирующей прямой, которая также проходит через начало координат. На основании этого определяются неизвестные углы α и β.
Определенные таким образом фактические значения первого угла α и второго угла β могут быть использованы в этом случае при реконструкции контура конструктивного элемента в соответствии с вышеупомянутым уравнением (1.1), так что измерительное устройство 2 калибровано в соответствии с этим.
Ошибки измерения, которые основываются на отклонении фактических геометрических пропорций измерительного устройства 2 от принятых геометрических пропорций, таким образом, в сравнении с уровнем техники, надежно предотвращаются. Изобретение обеспечивает тем самым по сравнению с измерительными устройствами из уровня техники улучшенную вследствие относительно небольших затрат точность измерений.
На чертежах одинаковые или соответствующие друг другу конструктивные элементы обозначены одинаковыми ссылочными позициями. Фиг. 2А-2Е демонстрируют конструктивно слегла измененный вариант примера осуществления изобретения в соответствии с фиг. 1 и фиг. 3, который, однако, в отношении главного принципа в соответствии с изобретением согласуется с примером осуществления в соответствии с фиг. 1 и фиг. 3.
Реферат
Изобретение относится к машиностроению и может быть использовано при измерении контролируемых изделий во время обработки на обрабатывающем станке. Измерительное устройство содержит основной корпус и измерительную головку, которая выполнена с возможностью перемещения между исходным положением и положением измерения. Головка соединена с основным корпусом через рычажную систему с возможностью слежения в положении измерения за орбитальными вращениями контролируемого изделия вокруг поворотной оси и имеет измерительный щуп для снятия измеренных значений. Для управления процессом измерения предусмотрено устройство управления, которое выполнено и отрегулировано таким образом, что измерительное устройство имеет возможность калибровки в режиме калибровки. 2 н. и 12 з. п. ф-лы, 10 ил.
Формула
основной корпус,
измерительную головку, выполненную с возможностью перемещения между исходным положением и положением измерения и соединенную с основным корпусом через рычажную систему, которая выполнена и отрегулирована так, что измерительная головка в положении измерения следует за орбитальными вращениями контролируемого изделия вокруг поворотной оси,
причем измерительная головка имеет выполненный с возможностью отклонения вдоль линейной оси измерительный щуп для снятия измеренных значений во время процесса измерения, а также
устройство управления для управления процессом измерения,
отличающееся тем, что
оно выполнено с возможностью калибровки в режиме калибровки с помощью упомянутого устройства управления.
Комментарии