Экспериментальная установка "мехатронный подшипник качения" - RU177846U1
Код документа: RU177846U1
Чертежи


Описание
Полезная модель относится к области учебного лабораторного оборудования и может быть использована в учебном процессе, при проведении лабораторных работ и практических занятий по общеинженерным дисциплинам в высших и средних специальных учебных заведениях.
В качестве прототипа данного технического решения выбрана экспериментальная установка, состоящая из станины, электродвигателя, связанного через муфту с валом, установленным в двух подшипниковых узлах, нагрузочного диска, закрепленного на валу, станины, на которой установлены электродвигатель, опорные узлы и стойки с датчиками перемещения, при этом внешнее кольцо подшипника качения установлено во втулке, зафиксированной в корпусе подшипникового узла крышками, а внутреннее кольцо установлено на валу упором в ступень (Патент РФ №96685, МПК G09B 23/10, опубликовано 10.08.2010 г.).
Недостатком данной экспериментальной установки является отсутствие возможности использования принципа обратной связи при регулировании частоты вращения вала из-за отсутствия датчиков, регистрирующих частоту вращения ротора, невозможность размещения в корпусах подшипниковых узлов мехатронных подшипников качения со встроенным датчиком частоты вращения, так как не предусмотрен вывод из подшипникового узла для интерфейсных проводов от подшипника качения.
Техническая задача, которую решает данная полезная модель - повышение информативности и наглядности собранных при проведении эксперимента данных, за счет одновременного сбора и обработки данных о перемещениях и частоте вращения вала, а также обеспечение обратной связи для регулирования частоты вращения вала.
Поставленная задача достигается тем, что в экспериментальная установка «Мехатронный подшипник качения», состоящая из электродвигателя, связанного через муфту с валом, установленным в двух подшипниковых узлах, нагрузочного диска, закрепленного на валу, станины, на которой установлены электродвигатель, опорные узлы и стойки с датчиками перемещения, при этом подшипниковый узел содержит корпус и подшипник качения, установленный на валу упором в ступень. Согласно полезной модели в корпусе подшипникового узла выполнены выступ, фиксирующий подшипник качения, в котором встроен датчик частоты вращения, и проточка для вывода проводов от датчика частоты вращения.
Технический результат применения данного устройства заключается в увеличении глубины и ширины исследований роторных систем за счет применения подшипника качения со встроенным датчиком частоты вращения.
Сущность полезной модели поясняется чертежами.
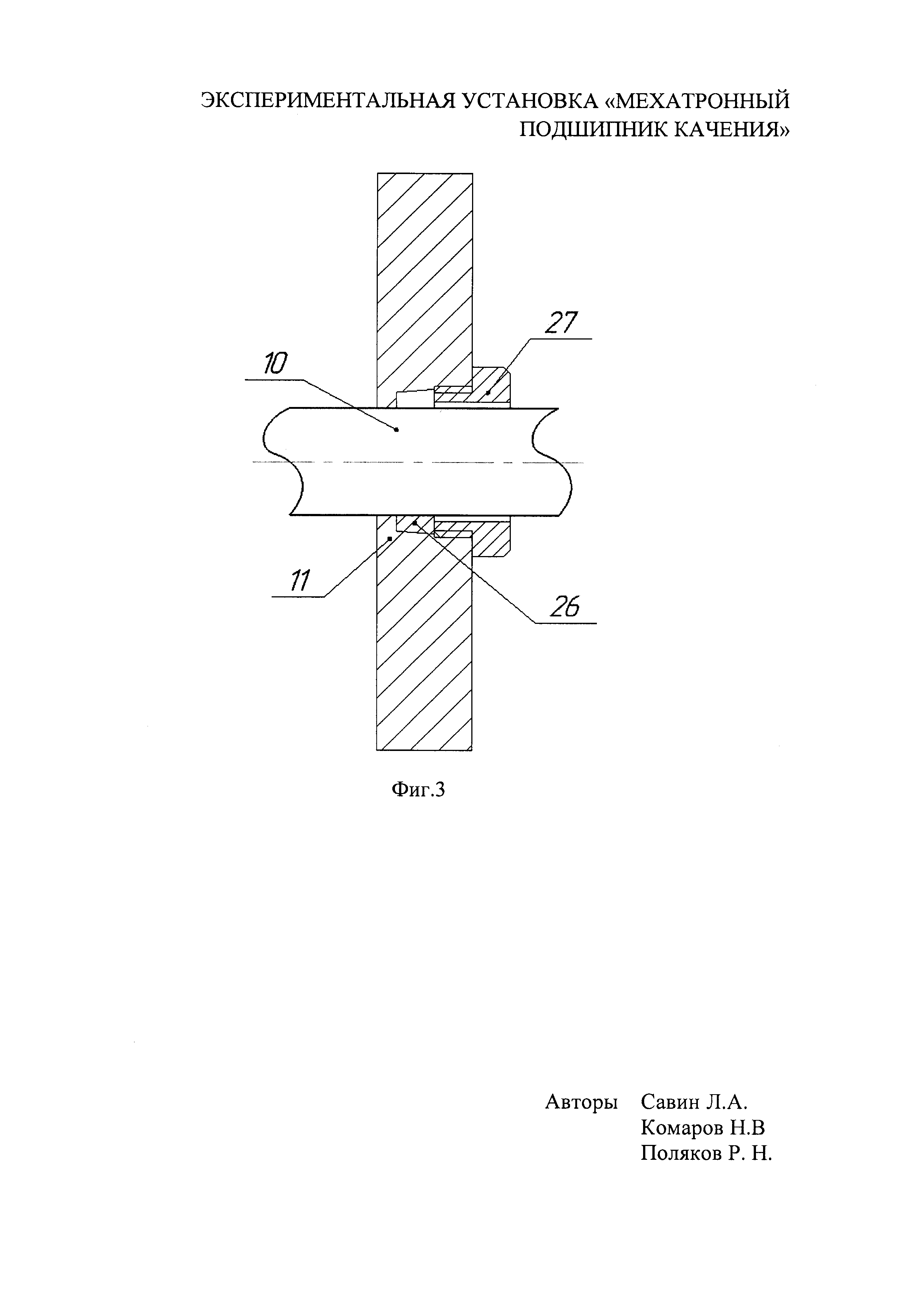
На фиг. 1 изображена схема экспериментальной установки в общем виде; на фиг. 2 изображен продольный разрез подшипникового узла; на фиг. 3 изображено устройство цангового крепления.
Экспериментальная установка (фиг. 1) содержит станину 1, закрепленную на опорах 2, электродвигатель 3, соединенный с частотным преобразователем 4, подшипниковые узлы 5, стойки 6, 7 и 8, муфту 9, соединяющую электродвигатель 3 с валом 10, закрепленным в подшипниковых узлах 5 враспор, нагрузочный диск 11, установленный на валу 10 с помощью цангового крепления 12, датчики 13 перемещений, смонтированные в стойках 6, кожухи 14 и 15, зафиксированные винтами 16 на стойках 7 и 8 соответственно, винты 17, фиксирующие на станине 1 электродвигатель 3, опорные узлы 5, стойки 6, 7 и 8, соединенный с датчиками 13 и подшипниковыми узлами 5 аналогово-цифровой преобразователь 18, а также компьютер 19, подключенный к преобразователям 4 и 18.
Подшипниковый узел 5 (фиг. 2) содержит корпус 28, в котором установлен шариковый радиально-упорный подшипник 20 качения со встроенным датчиком 21 частоты вращения, например, подшипник компании NTN-SNR Roulements, выполненный по технологии ASB. Фиксация подшипника 20 качения в корпусе 28 осуществляется упором в выступ 22, при этом подшипник 20 установлен на валу 10 упором в ступень 23 вала 10. В корпусе 28 выполнена проточка 24 для вывода проводов 25, соединяющих датчик 21 с аналого-цифровым преобразователем 18.
Цанговое крепление 12 (фиг. 3) состоит из разрезной втулки 26, посаженной на вал 10, и болта 27, которые установлены в нагрузочном диске 11, причем болт 27 фиксирует разрезную втулку 26 в нагрузочном диске 11.
В целях безопасности при проведении экспериментальной работы станина 1 должна находиться в горизонтальном положении, которое регулируется путем закручивания или выкручивания из станины 1 опор 2. Далее устанавливают нагрузочный диск 11 на вал 10 в место, установленное параметрами эксперимента. Для этого выкручивают болт 27, уменьшая осевое усилие на разрезную втулку 26, что приводит к уменьшению сил трения между втулкой 26 и валом 10, а также втулкой 26 и нагрузочным диском 11. Нагрузочный диск 11 перемещают в установленное место и фиксируют, закручивая болт 27, после чего в компьютер 19 вносятся параметры проведения эксперимента. Компьютер 19 управляет электродвигателем 3 через частотный преобразователь 4. Согласно введенным параметрам эксперимента электродвигатель 3 через муфту 9 приводит в движение вал 10. При этом сбор и обработка результатов производится компьютером 19, который через аналогово-цифровой преобразователь 18 получает значения деформации и скорости вращения вала 10, зафиксированных датчиками 13 и 21 соответственно. После выполнения всех параметров эксперимента вал 10 останавливается, после чего эксперимент считается законченным.
Реферат
Полезная модель относится к области учебного лабораторного оборудования и может быть использована в учебном процессе, при проведении лабораторных работ и практических занятий по общеинженерным дисциплинам в высших и средних специальных учебных заведениях. Техническая задача, которую решает данная полезная модель, заключается в повышении информативности и наглядности собранных при проведении эксперимента данных за счет одновременного сбора и обработки данных о перемещениях и частоте вращения вала, а также обеспечение обратной связи для регулирования частоты вращения вала. Экспериментальная установка «Мехатронный подшипник качения» состоит из электродвигателя, связанного через муфту с валом, установленным в двух подшипниковых узлах, нагрузочного диска, закрепленного на валу, станины, на которой установлены электродвигатель, опорные узлы и стойки с датчиками перемещения. При этом подшипниковый узел содержит корпус и подшипник качения, установленный на валу упором в ступень. В корпусе подшипникового узла выполнены выступ, фиксирующий подшипник качения, в котором встроен датчик частоты вращения, и проточка для вывода проводов от датчика частоты вращения. Технический результат применения данного устройства заключается в увеличении глубины и ширины исследований роторных систем за счет применения подшипника качения со встроенным датчиком частоты вращения. 3 ил.
Формула
Документы, цитированные в отчёте о поиске
Мехатронный подшипник скольжения
Комментарии