Устройство управления динамическим состоянием вибрационной технологической машины - RU2693711C2
Код документа: RU2693711C2
Чертежи



Описание
Технологические машины для реализации процессов вибрационного упрочнения деталей, обработки полостей гранулированными рабочими средами, транспортировка и сепарация сыпучих смесей снабжаются рабочими органами в виде твердых тел, совершающих определенные периодические движения. В этом плане показательна работа вибростендов различных конструктивно - технических типов и способов возбуждения вибрации. Эффективность технологических процессов и производительность вибростендов и вибрационных технологических машин существенным образом зависит от структуры вибрационного поля, то есть от особенностей распределения амплитуд колебаний точек рабочего органа по его длине. Некоторые технологические процессы, например, перемещение сыпучей смеси вверх по наклонной плоскости или сепарация смесей требуют, чтобы вибрационные поля были вполне определенной структуры.
Устройства настройки и корректировки вибрационных полей реализуются, по существу, в двух направлениях, которые ориентированы на корректировку условий работы вибровозбудителей или путем использования специальных средств, применяемых в вибростендах как дополнительные связи. Упомянутые подходы требуют использования достаточно сложных корректирующих механизмов и источников питания для их работы.
Предлагаемое устройство управления относится к области вибрационных технологий, которые обеспечивают возможности модификации свойств поверхностей деталей за счет упрочняющих вибрационных взаимодействий с гранулированной рабочей средой. В частности, к числу таких процессов может быть отнесено виброупрочнения. Реализация процессов связана с необходимостью оценки форм и контроля особенностей вибрационного поля, что требует определенных действий по формированию структуры вибрационного поля рабочего органа технологической вибрационной машины. Подобного рода задачи возникают в технологических процессах добычи и переработки полезных ископаемых, вибрационной транспортировке сыпучих материалов; в машиностроении такие задачи возникают при упрочнении деталей, их сортировки и др.
Известно изобретение RU 2613210 С1, МПК В07В 1/40, опубликовано 15.03.2017 "Вибрационный грохот", основанное на использовании вибростенда в виде протяженного твердого тела на упругих опорах, приводимого в движение инерционным вибровозбудителем. Для организации выбора рационального режима работы на рабочем столе вибростенда устанавливается платформа, угол наклона которой может изменяться специальной настройкой. Недостатком изобретения является невозможность формирования структуры вибрационного поля виброгрохота из-за установки и закрепления шарнирного соединения между плоскостью рабочего органа и поверхностью направляющей платформой.
Известно изобретение RU 2228252 С1, МПК В24В 31/06, опубликовано 10.05.2004 "Устройство для вибрационной обработки длинномерных деталей", в котором виброударное упрочнение осуществляется в специальном контейнере, обеспечивающем возможности придавать рабочей среде сложные движения за счет сложения вращательного движения и вертикальных вибраций, формируемых инерционным возбудителем. Недостатком изобретения является отсутствие возможностей создания устойчивых и контролируемых форм вибрационных полей.
В качестве прототипа взято изобретение RU 2342243 С2, МПК В24В 31/067, опубликовано 27.12.2008 "Способ виброударной обработки поверхностей тонкостенных деталей". Способ реализуется на вибростенда в виде твердого протяженного тела на упругих опорах. Обрабатываемые детали загружаются вместе с рабочей средой в контейнере, который устанавливается на рабочей поверхности вибростенда. Вибрационное поле переменной структуры формируется совместным действием двух инерционных возбудителей, разнесенных по концам рабочего органа и выбором угла наклона отражателя, создающего необходимые условия виброудалении. Недостатком такого способа является серьезные трудности целенаправленного формирования путем перебора условий устойчивой структуры вибрационного поля по длине рабочего органа и создания соответствующих зон гарантированной эффективности качества вибрационного упрочнения.
Задача устройства заключается в управлении динамическим состоянием технологической вибрационной машины за счет изменения положения динамического гасителя колебаний.
Устройство для управления динамическим состоянием вибрационной машины, содержащее рабочий стол с размещенными на нем вибровозбудителями, опирающийся на упругие элементы, отличающееся тем, что оно дополнительно снабжено траверсой с расположенным на ней динамическим гасителем, при этом траверса установлена с возможностью перемещения вдоль рабочего стола с помощью сервоприводов и ходовых винтов, расположенных с обеих сторон рабочего стола, а динамический гаситель закреплен на траверсе с помощью упругого элемента.
Сущность предлагаемого изобретения поясняется чертежами.
Фиг. 1 - принципиальная схема предлагаемой вибрационной технологической машины.
Фиг. 2 - предлагаемая вибрационная технологическая машина (в разрезе А-А).
Фиг. 3 - предлагаемая вибрационная технологическая машина (вид сверху).
На Фиг. 1 приводится принципиальная схема вибростенда с динамическим корректором для управления состоянием и настройки вибрационного поля.
Изобретение работает следующим образом.
Предлагаемое устройство управления и настройки вибрационного поля и основано на использовании эффектов динамического гашения колебаний в механических системах с тремя степенями свободы. Вибростенд (или технический объект) состоит из твердого тела 1, совершающего под действием вибрационного возбудителя 6 плоские колебания у1, у2 (у0, ϕ), создаваемые упругими элементами 4, 12 с соответствующими жесткостями k1 и k2. Рассматриваемое твердое тело опирается на опорную поверхность 2 и обладает массоинерционными параметрами (массой М и моментом инерции относительно центра тяжести J). Принципиальная схема динамических взаимодействий между элементами системы приведена на Фиг. 1.
Основным элементом системы, с помощью которого формируются необходимые структуры и свойства вибрационного поля технологической машины, является траверса 3, на которой расположен динамический гаситель колебаний.
На Фиг. 2 дано устройство траверсы 3 и расположение элементов динамического гасителя колебаний, где представлен разрез А-А. Динамический гаситель находится на траверсе 3, которая может перемещаться с помощью ходовых винтов 13 вдоль рабочего стола 1 (или твердого тела) в необходимую точку с помощью сервоприводов 5, 11. Динамический гаситель колебаний состоит из упругого элемента 14 жесткостью k3 и подвижной массы m3: позиция 15. Элемент 15 имеет датчик 16 для ограничения амплитуды колебаний динамического гасителя, который при возникновении предельной ситуации подает соответствующий сигнал в блок управления 10.
Возбуждение динамического гасителя колебаний происходит при работе вибровозбудителя 6. Предусматривается возможность перемещения траверсы 3 в обоих направлениях относительно центра тяжести. Предельное смещение траверсы 3 определяется контактом 3 с корпусом сервоприводов 5, 11.
Управление работой технологической вибрационной технологической машины, которая приведена на Фиг. 1, представляет собой механическую колебательную систему с тремя степенями свободы (координаты рабочего органа или стола вибростенда у1, у2, а также координата динамического состояния гасителя колебаний - у3 - Фиг. 2), осуществляется с помощью блока управления 10.
Для контроля за динамическим состоянием технологической системы используются виброизмерительные датчики 7, 9, 16. Система датчиков имеет коммуникации для передачи соответствующих сигналов. Положение траверсы определяется датчиком 9, а состояние динамического гасителя колебаний - 16.
На Фиг. 3 дано расположение элементов системы в плане, где показано расположение вибровозбудителя 6, траверсы 3 с сервоприводами 5, 11 и ходовыми винтами 13. Блок обработки сигналов о динамическом состоянии 10 обеспечивает коммуникации с датчиками.
Работа технологической машины осуществляется следующим образом. При включении комплекса в работу ведется контроль динамического состояния процесса вибрационной обработки через наблюдение за параметрами вибрационного поля. Характерным является положение точки присоединения (т. А) динамического гасителя колебаний или координаты уА траверсы 3 в точке, в которой вертикальная амплитуда рабочего органа вибростенда становится равной нулю. Такой динамический эффект определяется суммарным эффектом движения твердого тела 1 по координатам у1 и у2. Нулевое значение амплитуды колебаний твердого тела 1 в плоском движении в физическом смысле, означает, что твердое тело 1 на этой частоте будет совершать колебательные движения как рычаг с неподвижной точкой опоры. Это соответствует распределению амплитуд колебаний точек протяженного твердого тела по линейному закону. При изменении параметров технологической системы или при переходе к другим режимам работы структура вибрационного поля изменяется. Ее корректировка в необходимой форме возможна при перемещении траверсы вдоль рабочего органа при неизменной частоте вибровозбудителя, а также, наоборот, путем изменения частоты при постоянном положении динамического гасителя.
При более детализированной настройке технологического комплекса, что может быть связано с условиями реализации технологического процесса, изменениям подвергаются оба настроечных параметра, то есть частота возмущения и место расположения динамического гасителя колебаний. Необходимый режим управления технологическим комплексом обеспечивается системой управления сервоприводами (электролмеханическими, электрогидравлическими и др.). Блок управления системой настройки реализует с помощью программного устройства на основе получаемой информации о динамическом состоянии технологического комплекса.
Теоретическое обоснование приведено в приложении. Приведенные испытания на моделях также подтверждали возможность управления динамическим состоянием вибрационной технологической машины и устройство для его осуществления.
ПРИЛОЖЕНИЕ
Теоретическое обоснование
Расчетная схема технологической вибрационной машины представляет собой механическую колебательную систему с тремя степенями свободы, как это показано на Рис. 1. Система состоит из твердого тела массой М, имеющего момент инерции J относительно центра тяжести. Динамический гаситель колебаний присоединяется в т. А на расстоянии


Уравнения движения исходной системы на рисунке 1 могут быть построены на основе использования уравнения Лагранжа второго рода [1, 2]. Составим выражения для кинетической и потенциальной энергий:


Между координатами у1, у2, у3 и у0, ϕ, уА существует ряд соотношений:

где



В свою очередь

При этом выполняются геометрические условия:

Выражения (1), (2) с учетом (3)÷(5) можно записать в виде:


Коэффициенты уравнений движения (6), (7) после преобразований Лапласа принимают вид, как приведено в таблице 1.

Примечание:




Отметим, что процедура получения коэффициентов уравнений в операторной форме в таблице 1 предполагает использование преобразований Лапласа при нулевых начальных условиях [1, 2]. На основе таблицы 1 можно построить структурную математическую модель исходной системы в виде структурной схемы эквивалентной в динамическом отношении системы автоматического управления, что приведено на рисунке 2.
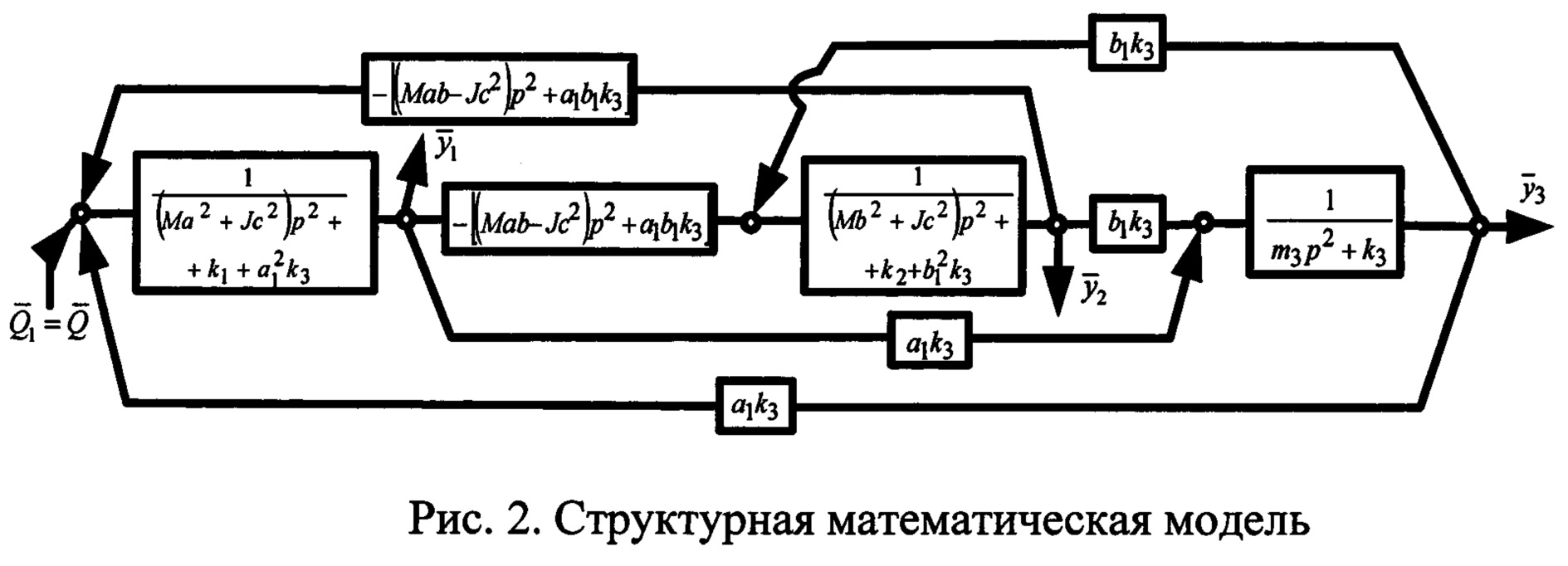
Запишем выражения для передаточных функций системы при силовом возмущении




где

- характеристическое частотное уравнение.
Отметим, что значения коэффициентов aij приводятся в таблице 1. Для оценки связности движений между координатами




Связи между координатой



или

Для оценки динамического состояния из (13) имеем две частоты режимов динамического гашения колебаний определяется выражением:
1. Первая частота

2. Вторая частота может быть найдена из уравнения

отсюда следует

При рассмотрении частных случаев отметим ряд особенностей:
1. При


2. При


3. При


4. При


5. При


Режим динамического гашения колебаний при использовании передаточных функций (8), (9) определяются из условия "обнуления" их числителей. Место расположения траверсы
Таким образом вибрационная технологическая система на частотах

имеет режим динамического гашения колебаний в т. А. В этом случае твердое тело можно рассматривать как рычаг второго рода с точкой вращения т. А. Координаты y1, у2 будут направлены в разные стороны. Распределение амплитуд колебаний промежуточных точек будет определяться прямой, проходящей через точку А. При таком режиме вибрационное поле имеет специфический вид и зону малых колебаний в близости к точке А, что формирует неоднородность взаимодействия рабочей среды с деталью при реализации вибрационного технологического процесса.
Кроме частоты динамического гашения колебаний, определяемой выражением (22), система в силу особенностей динамического взаимодействия элементов в системе с тремя степенями свободы. Система имеет возможности в реализации других режимов динамического гашения колебаний, которые могут определяться из "обнуления" числителей передаточных функций (8) и (9). Частотные уравнения имеют вид соответственно:


Уравнение (24) дает одну частоту нулевую. Используя (23), (24), можно получить, учитывая особенности детали, например, в процессах виброупрочнения, необходимую форму вибрационного поля. Наибольший интерес представляет процесс выравнивания структура вибрационного поля из условия выполнения соотношения

В таком случае частота на которой реализуется необходимые условия настройки вибрационного поля определяется выражением (12). На Рис. 3 приведена частотная диаграмма для определения частоты


Частотная диаграмма на Рис. 3 построена в координатных осях: ордината - ω2_ частота колебаний; абсцисса











Приведенная технология построения математической модели технологического вибрационного процесса, вывода необходимых аналитических зависимостей, определяющих параметры необходимых режимов и условий их устойчивой реализацией, по существу, являются основой для построения алгоритмов автоматического управления работой вибрационного технологического комплекса работающего в допустимых пределах обеспечения динамического качества процессов и безопасности эксплуатации оборудовано.
Использованная литература
1. Елисеев С.В., Резник Ю.Н., Хоменко А.П. и др. Динамический синтез в обобщенных задачах виброзащиты и виброизоляции технических объектов. Иркутск: ИГУ, 2008. 523 с.
2. Елисеев С.В., Артюнин А.И. Прикладная теория колебаний в задачах динамики линейных механических систем. Новосибирск: Наука, 2016. 459 с.
Реферат
Изобретение относится к области машиностроения и может быть использовано в вибрационных технологических машинах. Устройство содержит опирающийся на упругие элементы рабочий стол с размещенными на нем вибровозбудителями и траверсу с расположенным на ней динамическим гасителем колебаний. Траверса установлена с возможностью перемещения вдоль рабочего стола с помощью сервоприводов и ходовых винтов, расположенных с обеих сторон рабочего стола, а динамический гаситель колебаний закреплен на траверсе с помощью упругого элемента. В результате расширяются технологические возможности вибрационных машин за счет распределения амплитуд колебаний точек рабочего стола по его длине. 3 ил., 1 табл.
Комментарии