Механизм педалей авиационного тренажера - RU173918U1
Код документа: RU173918U1
Чертежи
Описание
Область техники, к которой относится полезная модель
Настоящая полезная модель относится к средствам управления транспортными средствами (летательными аппаратами), а именно к органам управления комплексных авиационных тренажеров.
Уровень техники
Из уровня техники известны технические решения, обеспечивающие выполнение функций педального узла для авиационных тренажеров. Как правило, данные устройства реализуются в виде автономного модуля, в котором перемещение педалей осуществляется по направляющим либо посредством поворота жестко соединяющей их качалки.
Из уровня техники известно решение, представленное в заявке на полезную модель CN 203858777 - «Distance-regulating pedal mechanism of flight simulator», в котором представлен способ реализации педального узла для автотренажера в виде педального узла с двумя педалями, закрепленными на качалке и имеющими возможность отклоняться вперед от номинального положения. Устройство снабжено загружателями поворота педалей вокруг общей вертикальной оси и загружателями поворота каждой педали вокруг горизонтальной оси качалки. Данная конструкция обеспечивает возможность управления рулем направления за счет дифференцированного отклонения педалей в горизонтальной плоскости, а также раздельного управления тормозами за счет индивидуального отклонения педалей в вертикальной плоскости.
Однако данное устройство не обеспечивает эргономического перемещения ног пилота, поскольку требует разворота стопы вокруг вертикальной оси. Данная особенность также ограничивает диапазон отклонения педалей, а также совместного использования различных каналов управления устройства.
Наиболее близким к заявляемому является техническое решение педального узла, представленного в заявке на полезную модель CN 202189480 - «General simulation pedal», представляющего собой узел из двух педалей, размещенных на обеспечивающих возвратно-поступательное движение качалках. Педали при этом имеют возможность индивидуального наклона в продольной вертикальной плоскости с обеспечением возвратного усилия с помощью загружателей, являющихся одновременно элементом паралеллограммного механизма перемещения педалей в продольной плоскости.
Недостатком данного решения является сложный шестеренчатый механизм обеспечения противоположной направленности перемещения педалей. Данный механизм сложен в изготовлении и настройке, не обеспечивает гибкости настройки взаимного положения педалей и ограничивает прикладываемые к педалям усилия.
Раскрытие полезной модели
Задачей настоящей полезной модели является создание системы и способа, обеспечивающих реализацию функционала педального узла самолета, а именно: возможность реализации взаимного противонаправленного плоскопараллельного движения педалей в сочетании с возможностью индивидуального отклонения каждой педали в продольной вертикальной плоскости.
Техническим результатом полезной модели является кинематическая схема и техническая реализация системы, обеспечивающей выполнение поставленной задачи в сочетании с конструктивной и технологической простотой, а также возможностью гибкой настройки и совместного согласованного использования двух узлов в составе авиатренажера.
Для достижения технического результата применены несколько базовых кинематических схем, выполняющих различные задачи и объединенных в единую систему. Продольное перемещение педалей осуществляется с помощью плоского параллелограммного механизма, два цилиндрических шарнира которого закреплены неподвижно, а к двум другим прикреплена педаль. Поворот педали в продольной вертикальной плоскости осуществляется за счет изменения длины одного из рычагов параллелограмма. Кинематическая связь двух педальных блоков (двух параллелограммных механизмов) обеспечивается посредством качалки, соединенной с рычагами с помощью штанг со сферическими шарнирами. Обратная связь и возврат механизма в исходное положение осуществляется с помощью упругих элементов (газовых или пружинных загружателей), соединяющих элементы механизма с основанием.
Краткое описание чертежей
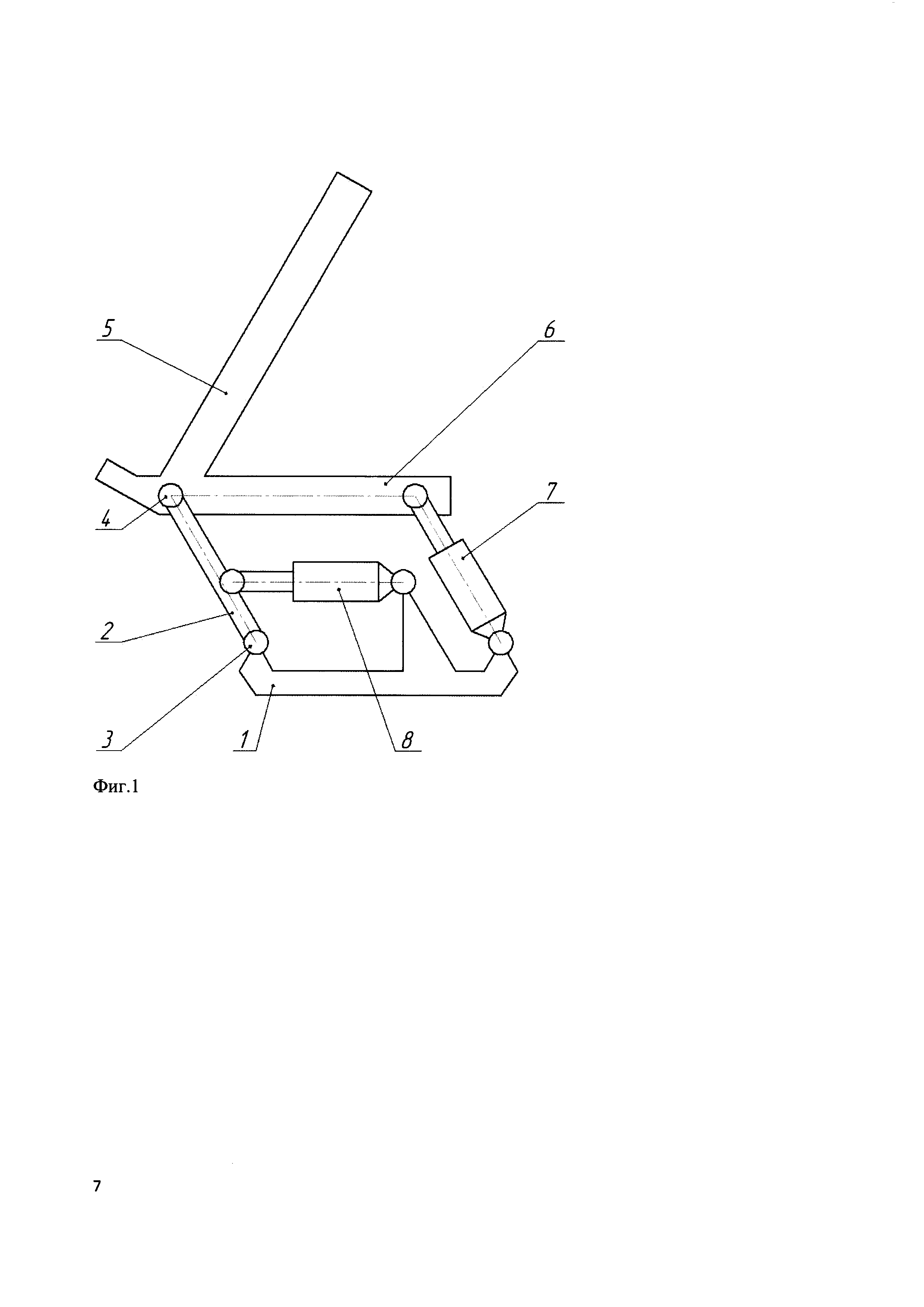
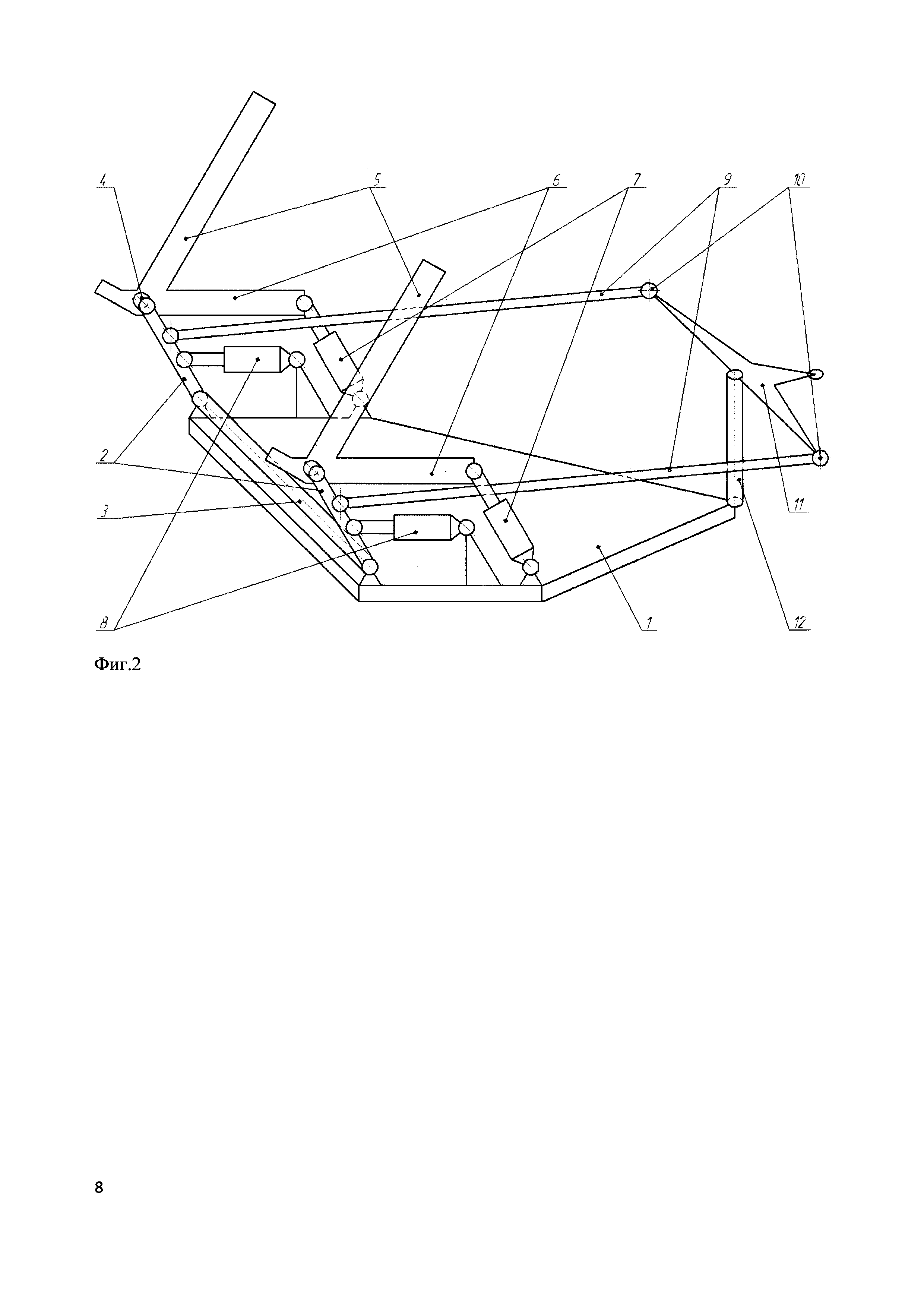
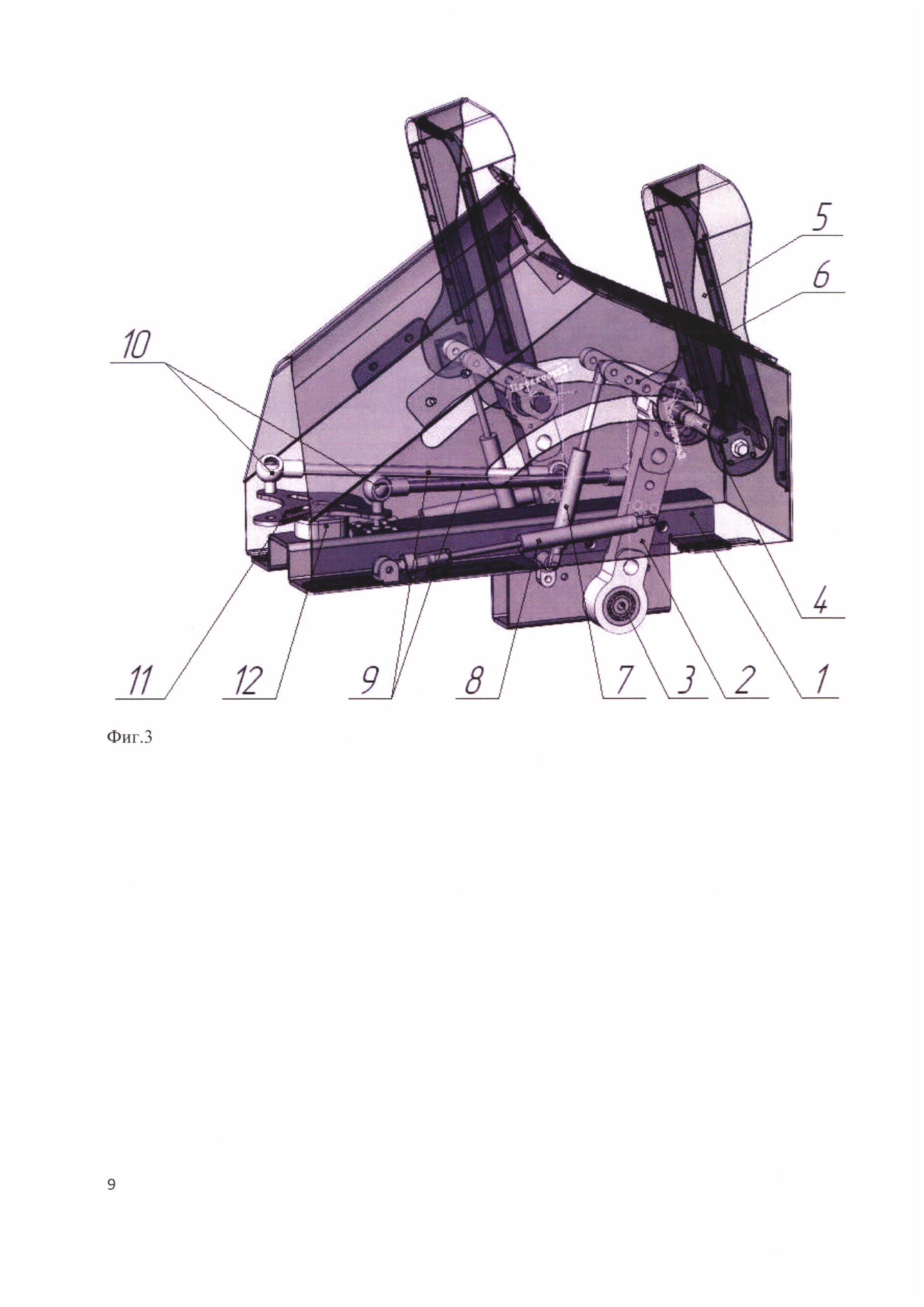
Полезная модель поясняется чертежами, где на фиг. 1 представлена схема в плане отдельного педального блока, на фиг. 2 представлена принципиальная съема педального узла, на фиг. 3 представлен общий вид педального узла. Позициями на фигурах обозначены: 1 - основание, 2 - рычаг-качалка, 3 - общий вал, 4 - вал педали, 5 - педаль, 6 - рычаг, 7 - шток переменной длины, 8 - элемент статической загрузки педали, 9 - штанга, 10 - шарнирный наконечник, 11 - качалка, 12 - ось качалки.
Осуществление полезной модели
Педальный узел состоит из двух педальных блоков. Каждый педальный блок состоит из детали основания (1), рычага-качалки (2), соединенной с основанием общим валом двух педалей (3), педали (5), объединенной с рычагом углового перемещения (6), и закрепленной на рычаге-качалке через вал педали (4), элемента статической загрузки педали (8), штока переменной длины (7), объединенных между собой цилиндрическими шарнирными узлами. Рычаг-качалка (2), рычаг углового перемещения педали (6) и шток переменной длины (7), соединенные шарнирами, формируют паралеллограммный механизм, обеспечивающий продольное перемещение каждой педали при фиксированной длине штока (7). Потребная характеристика продольного перемещения педалей обеспечивается элементом статической загрузки (загружателем) (8) продольного перемещения педали, шарнирно соединяющим рычаг-качалку (2) и основание (1). В любом продольном положении педали обеспечивается возможность ее углового перемещения (поворота) вокруг вала (4) крепления к рычагу (2). Потребную характеристику углового перемещения обеспечивает шток переменной длины (7), выполненный в формате газового поршня и выполняющий функции загружателя углового перемещения.
Педальный узел (Фиг. 2) состоит из двух педальных блоков (Фиг. 1), расположенных параллельно и соединенных качалкой (11) через штанги (9) с шарнирными наконечниками (10). Качалка, вращаясь на вертикальной оси (12), обеспечивает согласованное противоположное продольное перемещение двух педалей.
При приложении усилия к одной из педалей в продольном направлении детали (2) и (7) поворачиваются вокруг своих осей относительно основания (1), обеспечивая поступательное перемещение педали (5) в продольной плоскости. При этом штанга (9) передает усилие на качалку (11), которая, в свою очередь, создает усилие, перемещающее вторую педаль в противоположном направлении. При этом загружатель (8) сжимается, создавая возвратное усилие обратной связи. Датчик углового перемещения, расположенный на общем валу педальных блоков (3), определяет угол поворота рычага-качалки (2) и передает информацию системе управления.
При снятии усилия элемент статической загрузки (загружатель) (8), раздвигаясь, возвращает педаль в исходное положение. При этом механизм качалки (11) обеспечивает синхронный возврат в исходное положение второй педали.
При приложении момента к педали (5) посредством нажатия на ее верхний конец педаль поворачивается вокруг своего вала (4) относительно рычага-качалки (2) без перемещения последнего. При этом шток переменной длины (загружатель поворота педали) (7) сжимается, обеспечивая возвратное усилие. Датчик углового положения, расположенный на валу (4) педали (5), определяет угол поворота педали относительно рычага и передает информацию системе управления.
При снятии управляющего момента загружатель (7), раздвигаясь, обеспечивает возврат педали в исходное положение. Угловое перемещение (поворот) педалей (5) вокруг вала (4) при этом осуществляется независимо друг от друга, поскольку поворот каждой педали обеспечивает управление отдельным механизмом тренажера.
Педальный узел спроектирован в виде автономного модуля, общий вид которого представлен на Фиг. 3. Допускается как автономное, так и спаренное использование узлов (последнее необходимо при моделировании кабины тренажера пассажирского самолета с параллельным расположением пилотов). При спаренном использовании синхронизация работы педальных узлов обеспечивается штангой, соединяющей качалки (11) двух узлов. При перемещении педалей одного узла качалка поворачивается, передавая через штангу вращение на качалку второго узла, обеспечивающую синхронное с первым изменение положения педалей второго узла. При этом синхронизация поворота педалей двух узлов вокруг вала педалей (4) не осуществляется.
Существенной особенностью представленного узла является высокая технологичность конструкции: большая часть элементов представляет собой гнутые детали, заготовки которых вырезаны с помощью лазера. Применение готовых узлов и дешевых технологических процессов позволяет существенно снизить себестоимость изготовления узла по сравнению с представленными аналогами (в которых преобладают детали, изготовленные путем механической обработки, что является длительным и дорогостоящим процессом) при сопоставимых потребительских качествах.
Реферат
Механизм педалей авиационного тренажера относится к органам управления транспортными средствами, а именно к органам управления комплексным тренажером самолета. Модель представляет собой многофункциональный педальный узел управления, позволяющий осуществлять одновременно управление транспортным средством по курсу, а также раздельное управление правыми и левыми тормозными механизмами. Отличительными особенностями модели являются кинематическая схема, позволяющая осуществлять возвратно поступательное противоположное движение педалей, независимый наклон педалей относительно поперечной горизонтальной оси. Также можно отметить сравнительную простоту конструкции, небольшую металлоемкость, высокую технологичность и модульность конструкции. Возможно как индивидуальное, так и спаренное применение устройств. Модель допускает оперативную замену вышедшего из строя модуля.
Комментарии