Информационно-измерительная и управляющая система посадки группы беспилотных летательных аппаратов на посадочную платформу - RU2784221C1
Код документа: RU2784221C1
Чертежи

Описание
Изобретение относится к системе посадки группы беспилотных летательных аппаратов (БЛА) на как минимум одну посадочную платформу. Оно может быть использовано при модернизации существующих систем посадки роевых структур БЛА на посадочные платформы, создании перспективных транзитно-оконечных станций обслуживания БЛА при высокой интенсивности их поступления на посадку для обслуживания одной или несколькими платформами и сетевого взаимодействия множества подобных станций.
Из уровня техники известен способ посадки роя БЛА на подвижную платформу [AnamTahir, JariBӧling, Mohammad-Hashem Haghbayan, Juha Plosila. Navigation System For Landing A Swarm Of Autonomous Drones On AMovable Surface. Communications of the ECMS, Volume 34, Issue 1, Proceedings, ©ECMS Mike Steglich, Christian Mueller, Gaby Neumann, Mathias Walther (Editors). ISBN: 978-3-937436-68-5/978-3-937436-69-2(CD) ISSN 2522-2414)]. Рой из десяти БЛА имеет иерархическую структуру с назначенным лидером, имеющим наивысшую ступень иерархии. С ним связаны БЛА-последователи следующего уровня иерархии, которые в свою очередь имеют своих БЛА-последователей. Для учета подвижности платформы БЛА-лидер имеет обратную связь с подвижной платформой и корректирует свое положение. БЛА-последователи вслед за лидером корректируют свои положения в рое, при этом решают задачу предотвращения столкновения с учетом безопасных расстояний между соседними БЛА в группе, далее такая задача решается БЛА-последователями последующих уровней иерархии. Траектория лидера независима и определяет траекторию роевой структуры БЛА. Траектория каждого последователя определяется на основе ориентации и действий соответствующего лидера. С точки зрения движения, каждый последователь зависит от движения своего соответствующего лидера, используя стратегию безопасного расстояния. Каждый последователь отвечает за эффективное отслеживание траектории соответствующего лидера, сохраняя дистанцию между двумя соответствующими объектами. При решении задачи посадки роя опорные команды со станции посадочной платформы непрерывно передаются лидеру в качестве обратной связи, описывая явление отслеживания взаимного перемещения, в результате чего он корректирует свое местоположение при посадке. Этот процесс продолжается до приземления БЛА. Так как роевая структура полностью определяет взаимную ориентацию и порядок взаимодействия БЛА, то выбор очередного БЛА для посадки не требуется, при этом каждый следующий БЛА на посадку после БЛА-лидера осуществляет подобное взаимодействие с посадочной платформой по прямому и обратному каналам связи. Недостатками способа являются: отсутствие возможности повышения безопасности воздушного движения в зоне посадки путем контроля и управления со стороны технических средств посадочной платформы; отсутствие возможности создания контролируемой зоны ожидания БЛА в условиях стохастического потока с высокой интенсивностью их поступления для посадки на как минимум одну посадочную платформу; отсутствие приоритетной посадки БЛА в условиях стохастичности входного потока БЛА для посадки. В приведенном патенте указаны каналы взаимодействия БЛА с посадочной платформой, не раскрыта система посадки одиночного БЛА на посадочную платформу.
В работе [А.М. Агеев, В.В. Беляев, В.Г. Бондарев, В.В. Проценко Системы автоматической посадки беспилотных летательных аппаратов: проблемы и пути решения//Военная теория и практика. Военная мысль №4, 2020. С.130-136] проведен анализ способов и средств автоматической посадки БЛА, предложена система посадки, использующая свойства автономности визуальных систем посадки [Mohanraj V.R. Vision based landing for unmanned aerial vehicle // IEEE Aerospace Conference Proceedings, 2011. art. 5747518 01.03.2018)], построенная на основе высокоточного определения координат с использованием бортовой системы технического зрения и наземных точечных контрастных ориентиров. В состав системы входит: наземный сегмент, включающий комплект из трех наземных лазерных инфракрасных маяков (ЛИМ), размещаемых вдоль взлетно-посадочной полосы (ВПП) на полосе безопасности в заданной конфигурации; бортовой сегмент, включающий цифровую видеокамеру с узкополосным фильтром, устанавливаемую на гиростабилизированном управляемом подвесе; цифровой вычислитель со специальным программным обеспечением, позволяющим осуществлять поиск, захват, распознавание и сопровождение ИК-ориентиров, вычисление угловых и линейных координат БЛА относительно взлетно-посадочной полосы и формирование значений их рассогласования от линии глиссады в автопилот БЛА для создания в нем управляющих воздействий, обеспечивающих заход на посадку до высоты Н=0. Для решения задачи автоматизации пробега по ВПП и руления для БЛА самолетного типа среднего и тяжелого класса предлагается оборудование системой меток в виде источников излучения небольшой мощности либо световых мнемознаков, размещенных вдоль рулежных дорожек на определенных расстояниях, с разработкой соответствующего алгоритмического обеспечения распознавания меток и интеллектуального управления БЛА в режиме руления. Представленная система автоматической посадки осуществляет контроль и управление со стороны аэродромных технических средств. Недостатками системы являются: применение ее только для БЛА самолетного типа; отсутствие решения задачи посадки группы БЛА.
Известен способ точной посадки БЛА на посадочную платформу [RU2722521C1, опубл. 01.06.2020]. Для реализации способа получают видеокадр с четко различимым изображением БЛА при нахождении его в зоне посадки с помощью видеокамеры, закрепленной на посадочной платформе базовой станции или стартового контейнера, определяют положение БЛА на видеоизображении методами компьютерного зрения. Получают данные о координатах БЛА от датчиков, расположенных на его борту. Производят сравнение данных, полученных на посадочной платформе, и данных с борта БЛА. Передают управляющие сигналы для корректировки траектории посадки с учетом поправочных коэффициентов, полученных на основе сравнения вышеуказанных данных. Указанный способ обеспечивает повышение точности посадки БЛА. Недостатками способа являются: отсутствие решения задачи посадки группы БЛА; сложность навигации при посадке одиночного БЛА в условиях плохой видимости; использование способа посадки только для БЛА вертолетного типа.
Наиболее близкой по технической сущности является система автоматической дозаправки БЛА [RU2757400 С1, опубл. 15.10.2021], содержащая платформу, вычислительный модуль, модуль управления, систему крепления БЛА и модуль питания. Платформа выполнена в виде автономной станции. Место посадки БЛА на платформе обозначено разметкой. На платформе установлена УФ-камера, БЛА оснащен источником лазерного УФ-излучения, работающим на частоте возбуждения люминофора, которым выполнена разметка (навигационный рисунок) места посадки на посадочной площадке. Модуль питания включает аккумуляторную батарею и катушку для создания переменного магнитного поля для бесконтактной дозаправки. Достигается обеспечение точности посадки БЛА, бесконтактной автономной подзарядки БЛА, в том числе в условиях автономной генерации с использованием солнечной батареи.
Недостатком прототипа является то, что система не является системой массового обслуживания, так как не учитывает решение задач: обеспечение посадки группы БЛА или стохастически сформированной группы (очереди) БЛА из-за высокой интенсивности их поступления для обслуживания; приоритетная посадка БЛА из группы, в том числе со случайной структурой; организация безопасного движения множества БЛА в зоне ожидания при посадке.
В настоящее время не известны системы посадки роевых структур БЛА, в том числе случайных, или стохастических потоков БЛА, создающих очереди при посадке на как минимум одну посадочную платформу, а также обеспечивающих безопасное движение группы БЛА в зоне ожидания при посадке.
Целью изобретения является обеспечение посадки групп БЛА со случайной структурой, стохастических потоков БЛА с разных направлений, создающих очереди при посадке на как минимум одну посадочную платформу, безопасного движения роя БЛА в зонах ожидания и посадки, а также реализация приоритетного обслуживания БЛА посадочной станцией с как минимум одной посадочной платформой.
Отличие изобретения от прототипа состоит в том, что в зоне посадки создается информационно-измерительная и управляющая система посадки (ИИУСП), которая посредством информационно-измерительных, вычислительных, радио- и технических средств позволяет с использованием как минимум одной посадочной платформы создать систему массового обслуживания при посадке БЛА, состоящую из пространственно-временной зоны ожидания (ПВЗО) БЛА для ожидающих посадки роевых структур БЛА, буферной зоны посадки (БЗП) и как минимум одной посадочной платформы.
Для множества БЛА, требующих посадку на как минимум одну посадочную платформу, ПВЗО является структурируемым пространством, обеспечивающим создание безопасной очереди системы массового обслуживания посадки группы БЛА, а также регуляризацию входного потока БЛА, т.е. преобразование стохастического входного потока БЛА в регулярный поток для выхода на посадку. Размерность и структурная реализация ПВЗО формируется ИИУСП на основе данных о статистике обслуживания станцией посадки, информации о входном потоке БЛА, типе и характеристиках БЛА, данных от соседних станций посадки, от метеостанции, о дестабилизирующих факторах, требований о безопасном нахождении БЛА в ПВЗО. Преобразование стохастического входного потока БЛА в регулярный выходной поток БЛА на посадку в условиях высокой загрузки системы посадки обеспечивается, как вариант, формированием двумерной кольцевой структуры ПВЗО в виде тора (тороидальной структуры) и распределение в ней БЛА по пространственно разнесенным, замкнутым маршрутам, в каждом из которых определены временные интервалы следования БЛА с одинаковым приоритетом. БЗП обеспечивает выравнивание скорости БЛА при выходе из ПВЗО и его заходе на линию посадки, буферизацию потока БЛА, безопасность воздушного движения БЛА в зоне посадки и высокий коэффициент использования как минимум одной посадочной платформы. ИИУСП выполняет следующие функции: формирование структур ПВЗО с параметрами, соответствующими трафику БЛА и условиям безопасной посадки БЛА, обнаружение и регистрация БЛА для посадки, определение параметров управления БЛА; организация передачи БЛА времени и координат входа в ПВЗО, параметров траектории и скорости перемещения БЛА в ПВЗО; осуществление контроля воздушного движения БЛА в зоне ожидания, корректировка его маршрута, принудительный вывод БЛА из ПВЗО в случае создания им зоны опасного сближения БЛА в условиях дестабилизирующих факторов; реализация бесконфликтного протокола доступа БЛА к линии посадки при выходе из ПВЗО; задание параметров движения БЛА в БЗП, посадка БЛА на как минимум одну посадочную платформу. ИИУСП состоит из: модуля управления системой посадки, находящегося на как минимум одной посадочной платформе, в котором размещен центральный контроллер системы посадки и подключенные к нему контроллер подсистемы обнаружения, измерения координат и коррекции траектории БЛА, блок анализа загрузки и выбора структуры ПВЗО, контроллер управления доступом к системе посадки, блок записи и хранения данных системы посадки и модем связи, обеспечивающий взаимодействие системы посадки с БЛА; подсистемы свето- и радиотехнического обеспечения, устройства которой подключены к входу контроллера подсистемы, выход которого соединен с центральным контроллером системы посадки; подсистемы контроля воздушного движения в ПВЗО, состоящей из множества информационно-измерительных маяков (ИИМ), формирующих сеть и подключенных к входам как минимум одного коммутатора локальной сети подсистемы, выход которого соединен с входом контроллера управления доступом к системе посадки; метеостанции, выход которой подключен к входу центрального контроллера системы посадки. ИИУСП является распределенной системой, элементы которой территориально расположены в ПВЗО, БЗП, на как минимум одной посадочной платформе и вблизи нее. Распределенная ИИУСП характеризуется сетевой системой ИИМ, маяков аварийной посадки, находящихся в ПВЗО. Посредством ИИМ, маяков аварийной посадки и алгоритмического обеспечения контроллера управления доступом к системе посадки с помощью каналов беспроводной связи с БЛА, а также решаемых задач БЛА безопасного движения в роевых структурах, обеспечивается безопасность воздушного движения БЛА в ПВЗО. Каждый ИИМ имеет световое сопровождение, каналы взаимодействия (прямые и обратные) с БЛА, которые позволяют уточнять контроллеру управления доступом к системе посадки скорость движения объектов по маршрутам. Подсистема свето- и радиотехнического обеспечения включает в себя видеокамеры, радиоканалы управления и связи, обеспечивает взаимодействие посадочной платформы с БЛА при подлете его к зоне обслуживания станции посадки, в зоне посадки, в ПВЗО и БЗП, позволяет корректировать маршрут движения БЛА. БЗП характеризуется маршрутом движения как минимум одного БЛА, который задается контроллером управления доступом к системе посадки. Выход БЛА из ПВЗО в БЗП осуществляется в соответствии с протоколом множественного доступа, реализация которого осуществляется с помощью контроллера управления доступом к системе посадки. Статистический анализ посадки БЛА и выбор размерности ПВЗО осуществляется блоком анализа загрузки и выбора структуры ПВЗО, на основе команд управления из центрального контроллера системы посадки и загрузки данных из блока записи и хранения данных системы посадки. Центральный контроллер системы посадки осуществляет централизованное управление подсистемами, взаимодействие с контроллерами подсистем, отдельными элементами системы, а также с БЛА с использованием модема и интерфейсов связи.
Техническим результатом предлагаемого изобретения является формирование ИИУСП структуры ПВЗО на основе анализа трафика и характеристик БЛА, метеоусловий, сведений информационного взаимодействия системы посадки с другими транзитно-оконечными станциями посадки, выдача ИИУСП маршрутной информации БЛА для входа в ПВЗО и движения в ней, контроль безопасности и коррекция движения БЛА в ПВЗО и БЗП, формирование и передача управляющих сигналов БЛА для выхода из ПВЗО в БЗП путем решения задачи множественного доступа к системе посадки, повышение безопасности воздушного движения БЛА в ПВЗО путем контроля зон опасного сближения БЛА, обеспечение посадки БЛА на посадочную платформу.
Технический результат достигается тем, что информационно-измерительными, вычислительными радиотехническими средствами ИИУСП формируется структура ПВЗО с множеством замкнутых независимых маршрутов различной длины, обеспечивающая прием для посадки как текущих – входящих БЛА на интервале времени, так и планируемых БЛА со статистическим запасом (допуском) их размещения в структуре, обеспечивается безопасность движения БЛА в ПВЗО как за счет технического зрения БЛА, так и с использованием свето- и радиотехнических средств ИИУСП, осуществляется безопасная посадка БЛА за счет реализации алгоритмов выхода БЛА из ПВЗО в БЗП, контроля движения и посадки на как минимум одну посадочную платформу.
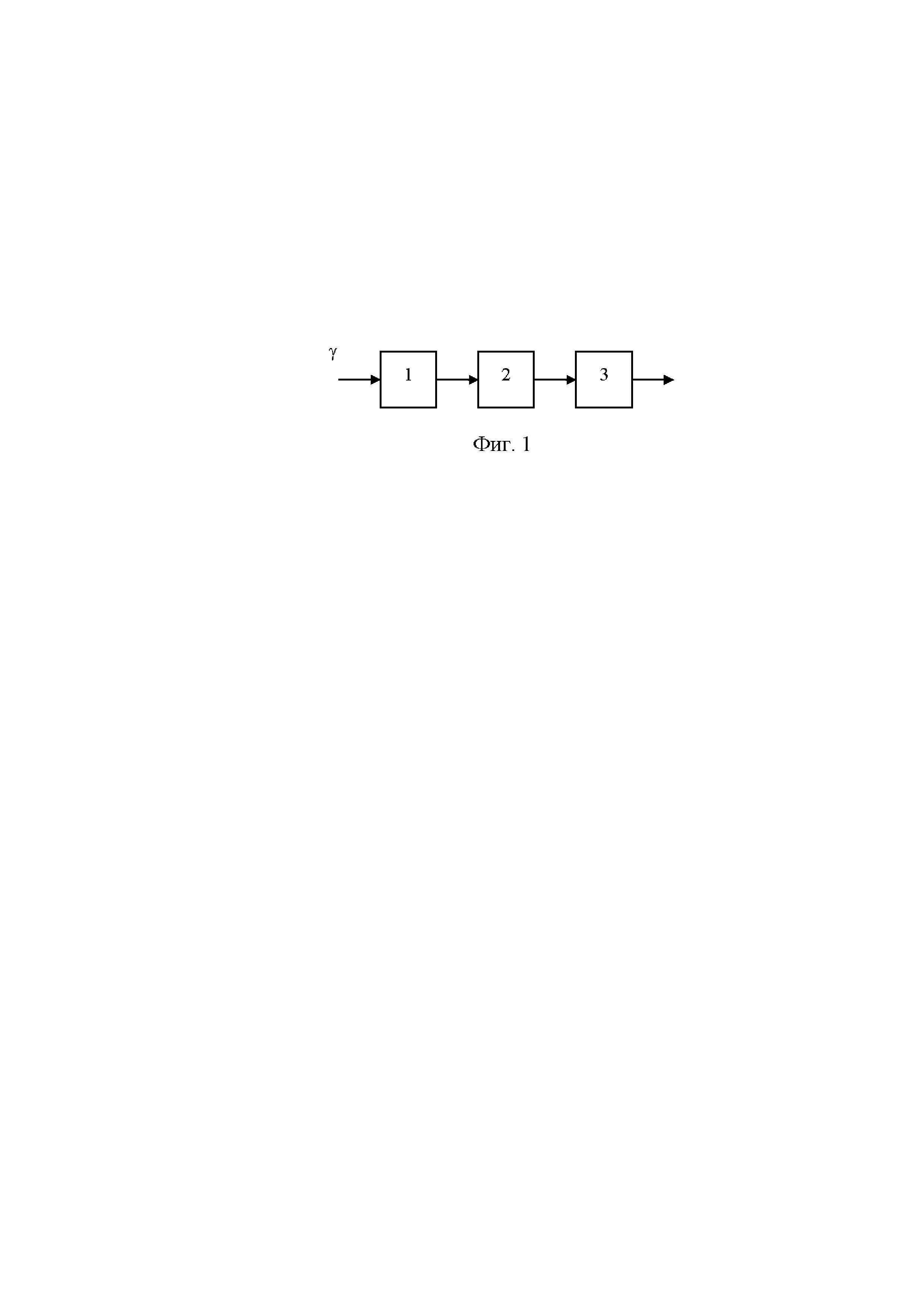
На фиг. 1 представлена модель системы посадки роевых групп БЛА на посадочную платформу в виде системы массового обслуживания, состоящей из основных блоков:
1 – ПВЗО;
2 – БЗП;
3 – посадочная платформа (ПП).
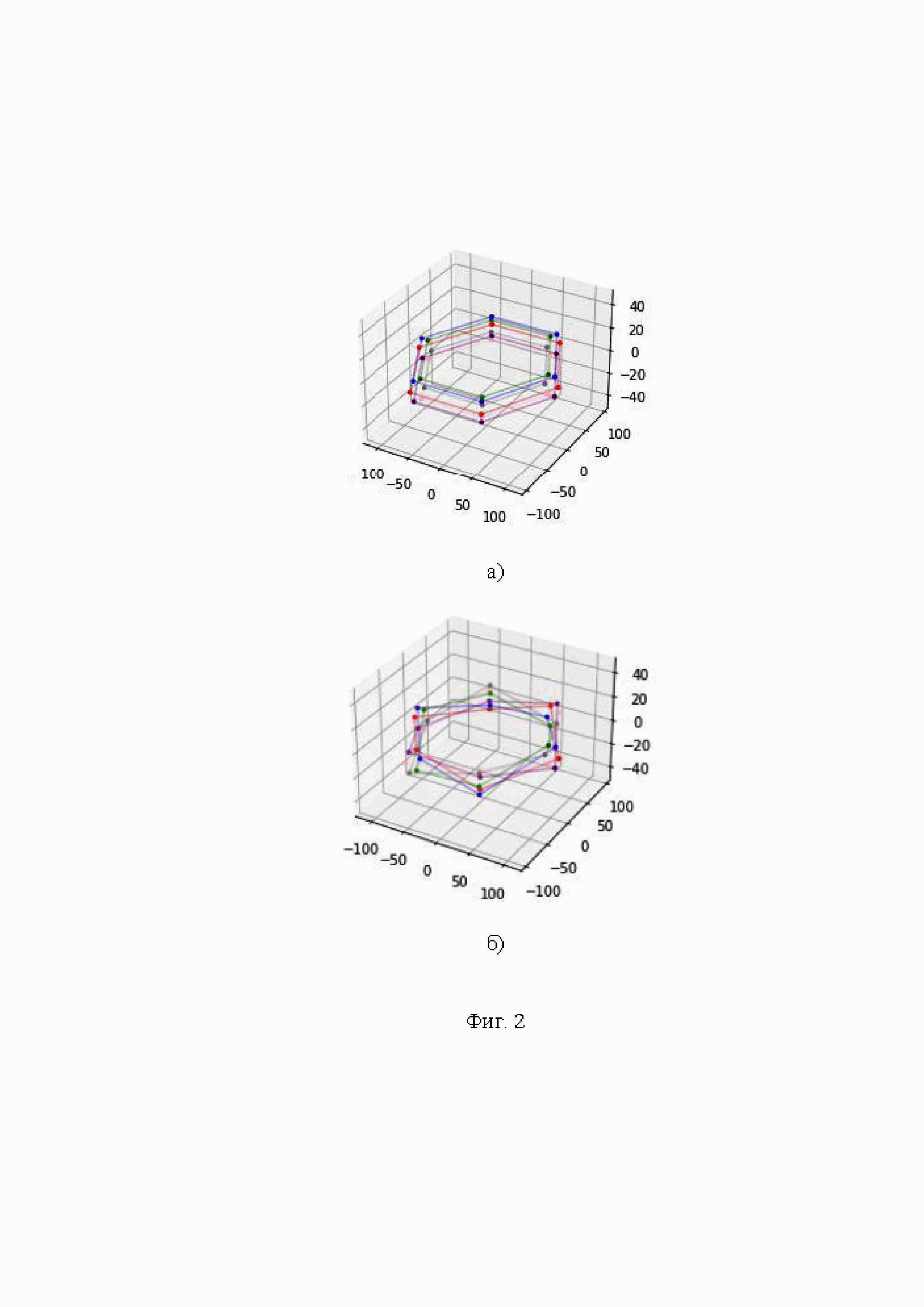
На фиг. 2 приведены примеры организации маршрутов по контрольным точкам в ПВЗО с тороидальной структурой: фиг. 2 а) – без изменения параметров в вертикальной плоскости; фиг. 2 б) – с изменением параметров в вертикальной плоскости.
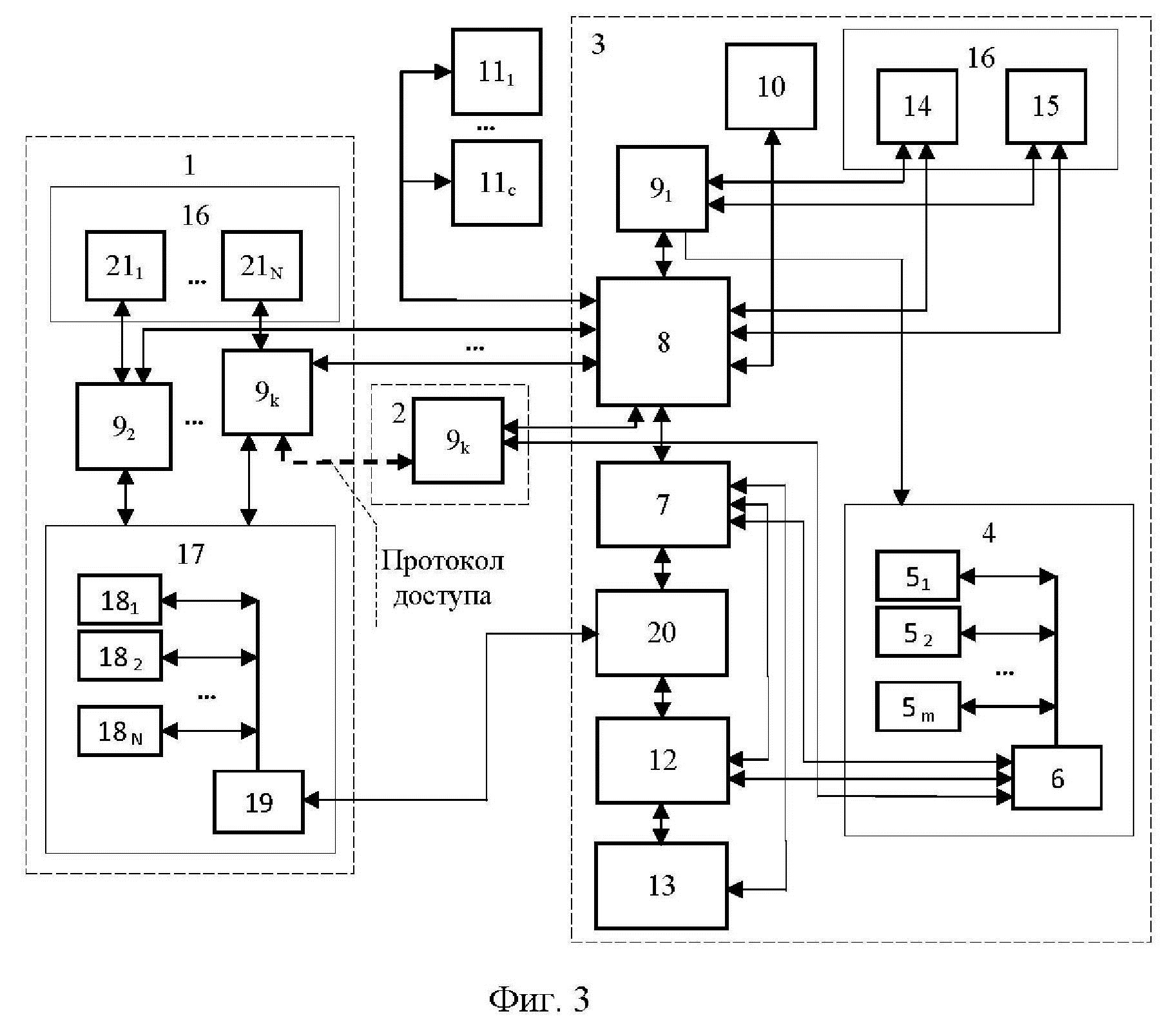
На фиг. 3 приведена структурная схема распределенной ИИСУП. В ее состав входят:
4 – подсистема обнаружения, изменения координат и коррекции траектории БЛА;
5 – видеокамера;
6 – контроллер подсистемы обнаружения, изменения координат и коррекции траектории БЛА;
7 – центральный контроллер системы посадки;
8 – модем связи;
9 – БЛА;
10 – метеостанция;
11 – транзитно-оконечная станция с системой посадки БЛА;
12 – блок записи и хранения данных системы посадки;
13 – блок анализа загрузки и выбора структуры ПВЗО;
14 – свето-технические устройства;
15 –радиомаяк;
16 – подсистема свето- и радиотехнического обеспечения;
17 – подсистема контроля воздушного движения в ПВЗО;
18 – ИИМ;
19 – коммутатор сети подсистемы контроля воздушного движения в ПВЗО;
20 – контроллер управления доступом к системе посадки.
Система массового обслуживания посадки группы БЛА со случайной структурой (фиг. 1), состоит из последовательно соединенных ПВЗО 1, БЗП 2 и ПП 3, на вход которой поступает рой БЛА со случайной структурой, либо стохастический поток БЛА с интенсивностью γ [БЛА/ед. времени]. ПВЗО 1 выполняет функции накопления ожидающих посадку БЛА, регуляризации входящего потока БЛА и обеспечения безопасности воздушного движения БЛА в ней, БЗП 2 осуществляет выравнивание скоростей движения БЛА при выходе БЛА из ПВЗО 1 и его входе в точку линии посадки ПП 3, а при высокой скорости обслуживания ПП 3 – эффективный коэффициент ее использования, путем загрузки БЗП 2 несколькими БЛА. Структурно ПВЗО 1 представляет собой, как вариант, двумерную кольцевую структуру (фиг. 2) – тороидальную структуру, которая обладает самоподобием, т.е. в ней идентичные поперечные кольцевые структуры, представляющие собой фигуру правильного многоугольника, формируют в продольной плоскости пространственную правильную многоугольную кольцевую структуру, вершины которой соответствуют указанным поперечным кольцевым структурам (далее называются элементарными кольцевыми структурами), вершины которых определяют координатные точки различных маршрутов. В результате, в тороидальной структуре формируются сектора, середины которых соответствуют вертикально расположенным элементарным кольцевым структурам (фиг. 2), через которые осуществляется вход и выход БЛА из ПВЗО 1. На фиг. 2 а) показаны маршруты движения БЛА без изменений координат в вертикальной плоскости, на фиг. 2 б) – с изменением координат в вертикальной плоскости. Применение маршрутов с изменением координат в вертикальной плоскости позволяет увеличить плотность БЛА в ПВЗО. Система посадки, в зависимости от анализа трафика БЛА, характеристик БЛА и метеоусловий, может изменять размерность поперечного многоугольника тороидальной структуры, что приведет к изменению количества и плотности секторов, кроме того, в зависимости от задачи безопасного воздушного движения, система также может изменять малый и большой радиусы тороидальной фигуры. Вершины пространственной тороидальной структуры формируют координатное пространство маршрутов БЛА. Направление полетов БЛА в ПВЗО выбирается единым, например, против часовой стрелки. Таким образом, пространственный фактор, характеризующий ресурс ПВЗО, определяется ее структурой и замкнутыми независимыми маршрутами в ней, а временной фактор – допустимыми временными интервалами между двумя следующими друг за другом БЛА в одном маршруте. Точками входа БЛА в ПВЗО и выхода БЛА из нее определяются алгоритмом управления доступом к системе посадки.
Функционирование распределенной ИИУСП осуществляется следующим образом. Подсистема обнаружения, измерения координат и коррекции траектории БЛА 4 средствами видео- и радиотехнического контроля 5 обнаруживает приближающийся объект, передает данные через контроллер подсистемы 6 в центральный контроллер системы посадки 7, который решает задачу идентификации объекта, при условии определения БЛА для решения задачи определения «свой-чужой» осуществляет радиообмен данными через модем связи 8 с приближающимся БЛА 9. При принятии решения центральным контроллером системы посадки 7 о допуске БЛА 9 к посадке на основе полученых данных с метеостанции 10, данных о характеристике БЛА 9, сведений загруженности соседних транзитно-оконечных станций с системами посадки 11, статистических данных о характеристиках трафика БЛА 9, полученных от блока записи и хранения данных системы посадки 12, а также данных от блока анализа загрузки и выбора структуры ПВЗО 13 о выбранной структуре ПВЗО 1, выдаются время и координаты точки входа в ПВЗО 1, маршрут движения в ней. БЛА 9 осуществляет движение в направлении ПВЗО 1 используя собственную GPS/ГЛОНАСС-навигацию, средства светотехнического обеспечения 14 и радиомаячной группы 15 подсистемы свето- и радиотехнического обеспечения 16. При приближении к точке входа к ПВЗО 1 БЛА 9 подает по радиоканалу через модем связи 8 сигнал-запрос центральному контроллеру системы посадки 7 на вход в нее по заданному маршруту. При получении разрешения начинает движение в ПВЗО 1. При движении по маршруту БЛА 9 выдерживает скоростной режим, обеспечивающий прохождение секторных координатных точек тороидальной структуры ПВЗО 1 (фиг. 2) в строго определенные временные интервалы. Движение группы БЛА 9 в ПВЗО 1 контролируется подсистемой контроля воздушного движения в ПВЗО 17 посредством ИИМ 18, передающими координатные данные и идентификаторы БЛА 9 через коммутатор сети подсистемы 19 контроллеру управления доступом к системе посадки 20, который на основе используемых данных о структуре ПВЗО 1, полученных от центрального контроллера системы посадки 7, при необходимости корректирует маршрут движения БЛА 9 путем подачи соответствующей команды через центральный контроллер системы посадки 7 и модем связи 8. В случае аварийной посадки БЛА 9 в ПВЗО 1 в каждом секторе зоны ожидания имеются маяки аварийной посадки 21, которые обеспечивают самостоятельное приземление БЛА 9. При этом в тороидальной структуре в каждом секторе имеется координатная точка, с которой разрешено осуществлять самотоятельное аварийное приземление БЛА 9. В случае дестабилизирующих факторов, когда БЛА 9 совершают опасное сближение, они самостоятельно решают задачу по уклонению от столкновения [KurikiY., NamerikawaT. Consensus-based cooperative formation control with collision avoidance for a multi-UAV system //2014 American Control Conference. – IEEE, 2014. – С. 2077-2082]. Одновременно с этим, на основе данных от подсистемы воздушного движения в ПВЗО 17 контроллер управления доступом к системе посадки 20 осуществляет выбор зоны с наибольшей аварийной ситуацией и подает сигнал экстренного вывода БЛА 9 из данной зоны через центральный контроллер системы посадки 7 и модем связи 8. Для предотвращения подобных аварийных ситуаций центральный контроллер системы посадки 7 на основе запросного сигнала в блок анализа и выбора структуры ПВЗО 17 и получения от него обновленных параметров структуры ПВЗО 1, передает всем БЛА 9 в ПВЗО 1 сигнал коррекции маршрутов движения с соответствующими временными интервалами. Выход БЛА 9 из ПВЗО 1 на посадку осуществляется при прохождении его через определенные координатные точки секторов тороидальной структуры зоны ожидания. Находясь в предыдущем перед выходом на посадку секторе БЛА 9 передает запросный сигнал на контроллер управления доступом к системе посадки 20. В соответствии с алгоритмом множественного доступа к посадочной платформе, контроллер управления доступом к системе посадки 20 отправляет ответный сигнал «разрешено/запрещено» также через центральный контроллер системы посадки 7 и модем связи 8. При получении запретного сигнала БЛА 9 продолжает движение в ПВЗО 1 по своему замкнутому маршруту. При получении положительного сигнала и прохождении соответствующей координатной точки тороидальной структуры зоны ожидания, БЛА 9 выходит на маршрут, соответствующий БЗП 2, который предварительно получен одновременно с сигналом разрешения на посадку. Приземление БЛА 9 на ПП 3 осуществляется с ипользованием необходимого оборудования для посадки одиночного БЛА 9, в частности, свето-технического оборудования ПП3, технологий компьютерного зрения, робототехнических средств захвата и удержания БЛА9 на ПП 3 и др. Взаимодействие БЛА 9 и контроллера управления доступом к системе посадки 20 может быть осуществлено путем введения дополнительного модема связи с определенной частотой для решения задачи безопасности вождушного движения в ПВЗО и решения задачи доступа к посадке на ПП 3.
Новизна изобретения состоит в создании ИИУСП для посадки роев БЛА на как минимум одну посадочную платформу, в том числе групп БЛА со случайной структурой, которая формирует ПВЗО БЛА с множеством независимых маршрутов различной длины, БЗП, обеспечивает безопасность воздушного движения в ПВЗО и БЗП, приоритетное обслуживание БЛА при посадке. Преимуществом перед прототипом является обеспечение автоматической посадки групп БЛА со случайными структурами и потоков БЛА, создающих очереди БЛА при посадке на как минимум одну посадочную платформу, обеспечение приоритетной посадки, возможность применения системы посадки как для БЛА самолетного, так и вертолетного типов.
Доказательством технической реализуемости изобретения является использование технических и вычислительных ресурсов системы посадки роя БЛА, средств технического зрения, систем контроля с видео- и ИК каналами, беспроводных систем связи в зоне посадки, обеспечивающих двустороннюю цифровую связь между центральным блоком системы посадки и множеством БЛА, а также известных алгоритмов повышения безопасности воздушного движения, множественного доступа к общему ресурсу, приоритетного обслуживания и способов формирования самоподобных пространственных структур с целью формирования пространственно-временной зоны ожидания.
Реферат
Информационно-измерительная и управляющая система посадки группы беспилотных летательных аппаратов (БЛА) на посадочную платформу содержит видео-, радио- и ИК средства связи, средства лазерного УФ-излучения, метеостанцию, роботизированные средства захвата и удержания одиночного БЛА, подсистему контроля воздушного движения в пространственно-временной зоне с сетевой системой информационно-измерительных маяков, контроллер сети подсистемы, контроллер управления доступом к системе посадки и маяков аварийной посадки, подсистему обнаружения, измерения координат и коррекции траектории БЛА, подсистему свето- и радиотехнического обеспечения, центральный контроллер системы посадки, модем и интерфейсы связи, блок записи и хранения данных системы посадки, блок анализа загрузки и выбора структуры пространственно-временной зоны ожидания. Обеспечивается повышение безопасности посадки БЛА из группы БЛА, повышение безопасности движения БЛА в зоне ожидания. 2 з.п. ф-лы, 3 ил.
Формула
Документы, цитированные в отчёте о поиске
Способ организации воздушного движения группы беспилотных летательных аппаратов в зоне посадки
Комментарии