Устройство помощи в вождении для транспортного средства и способ помощи в вождении для транспортного средства - RU2624373C1
Код документа: RU2624373C1
Чертежи






Описание
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству помощи в вождении для транспортного средства и способу помощи в вождении для транспортного средства.
Уровень техники
[0002] Известно устройство безопасности для вождения, которое помогает в избегании столкновения, когда рассматриваемое транспортное средство въезжает на перекресток с второстепенной дороги (ссылка на патентный документ 1). Устройство безопасности для вождения, описанное в патентном документе 1, определяет, может ли рассматриваемое транспортное средство въезжать на перекресток, на основе информации о движении пересекающего транспортного средства, с которым рассматриваемое транспортное средство может прийти в столкновение, когда въезжает на перекресток, и информации о находящемся впереди транспортном средстве, едущем впереди пересекающего транспортного средства.
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1: Японская патентная публикация № 2010-039603
Сущность изобретения
[0004] Устройство безопасности для вождения, описанное в патентном документе 1, определяет, может ли рассматриваемое транспортное средство въезжать на перекресток, на основе информации об ускорении пересекающего транспортного средства; однако, трудно получать точную информацию об ускорении пересекающего транспортного средства, находящегося далеко от рассматриваемого транспортного средства, и, следовательно, представляется затруднительным с высокой точностью определять, въезжать ли на перекресток.
[0005] Даже если пересекающее транспортное средство не находится далеко от рассматриваемого транспортного средства, устройство безопасности для вождения может быть неспособно получать информацию о пересекающем транспортном средстве, поскольку пересекающее транспортное средство может въезжать в слепую зону, окруженную другими объектами, поскольку пересекающее транспортное средство продвигается через перекресток после того, как пересекающее транспортное средство было обнаружено в некоторой точке.
[0006] Настоящее изобретение было осуществлено, принимая во внимание вышеописанную традиционную проблему. Целью настоящего изобретения является предоставление устройства помощи в вождении для транспортного средства и способа помощи в вождении для транспортного средства, способных определять, может ли рассматриваемое транспортное средство въезжать на перекресток, с высокой достоверностью.
[0007] Устройство помощи в вождении для транспортного средства согласно аспекту настоящего изобретения включает в себя секцию обнаружения объекта для обнаружения объектов, присутствующих на периферии рассматриваемого транспортного средства, и определяет, находится ли рассматриваемое транспортное средство в предварительно определенной области от перекрестка без светофора, где две или более дорог пересекаются, на основе текущей позиции рассматриваемого транспортного средства на карте. Устройство помощи в вождении для транспортного средства выделяет, из объектов, обнаруженных посредством секции обнаружения объекта, первый движущийся объект, который может приходить в столкновение с рассматриваемым транспортным средством, когда рассматриваемое транспортное средство въезжает на перекресток, когда определяется, что рассматриваемое транспортное средство находится в предварительно определенной позиции от перекрестка. Устройство помощи в вождении для транспортного средства выделяет из объектов, обнаруженных посредством секции обнаружения объекта, второй движущийся объект, пересекающий дорогу, по которой движется первый движущийся объект, между рассматриваемым транспортным средством и первым движущимся объектом, когда первый движущийся объект выделен, и получает информацию о движении второго движущегося объекта, пересекающего перекресток. Устройство помощи в вождении для транспортного средства определяет, что рассматриваемое транспортное средство может въезжать на перекресток, когда получает информацию о движении второго движущегося объекта, пересекающего перекресток.
Краткое описание чертежей
[0008] Фиг. 1 - это блок-схема, показывающая конфигурацию устройства помощи в вождении для транспортного средства согласно первому варианту осуществления.
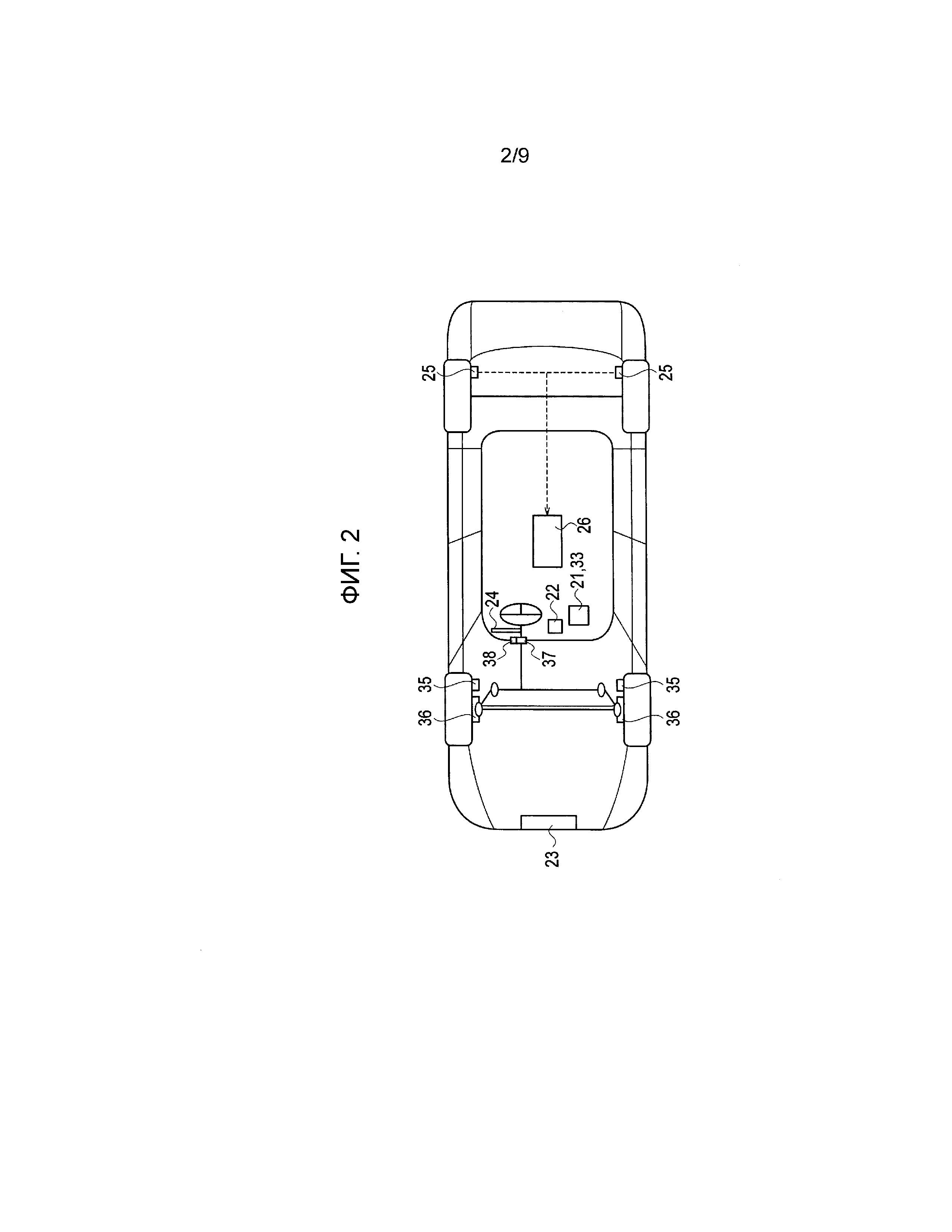
Фиг. 2 - вид сверху, показывающий пример установки устройства помощи в вождении для транспортного средства, показанного на фиг. 1.
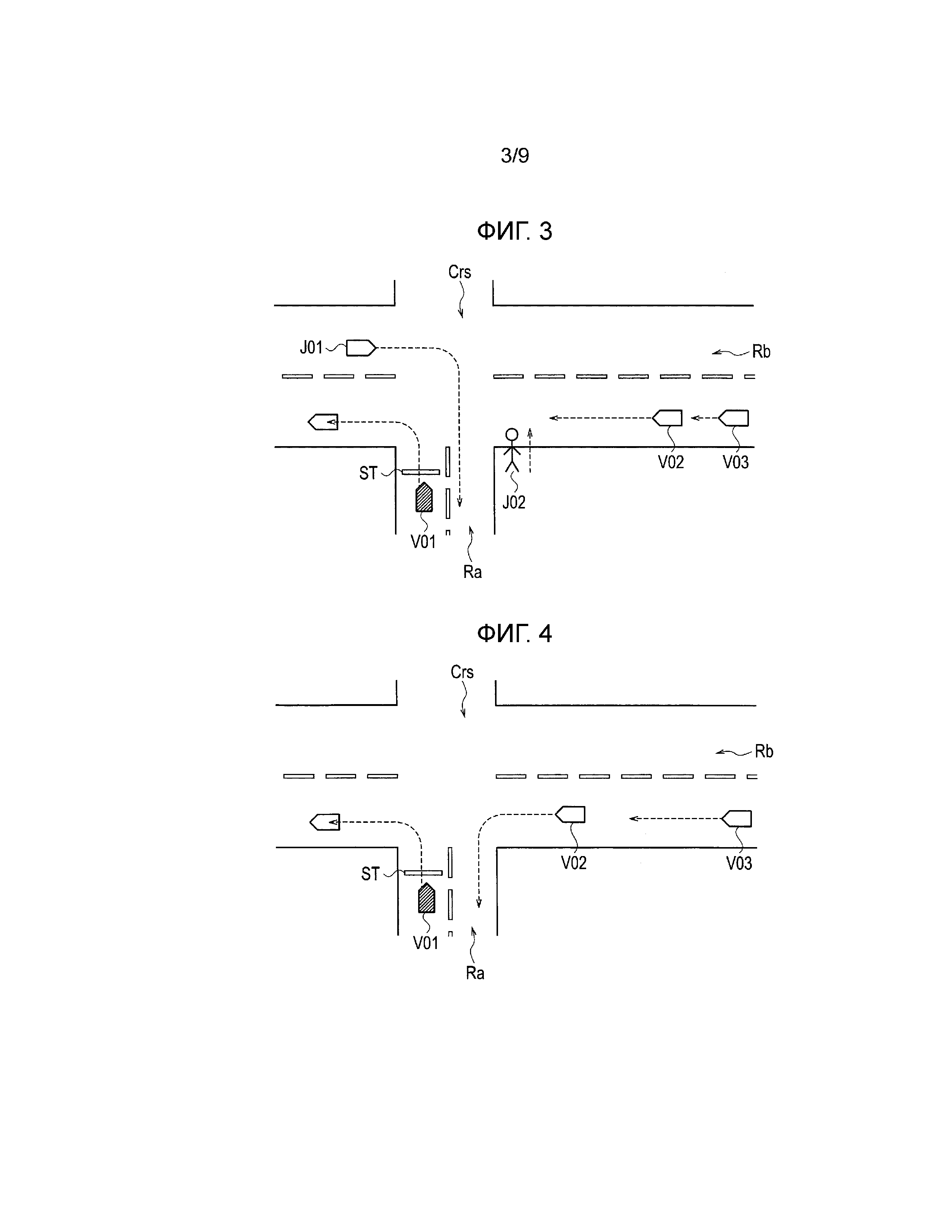
Фиг. 3 - схематичный вид для объяснения способа для выделения первого движущегося объекта и второго движущегося объекта.
Фиг. 4 - схематичный вид для объяснения способа для выделения второго движущегося объекта.
Фиг. 5 - схематичный вид для объяснения первого примера посредством прогнозирования риска столкновения посредством секции 16 определения въезда на перекресток.
Фиг. 6 - график, показывающий риск столкновения, когда первый движущийся объект едет по главной дороге на перекрестке. Фиг. 6a - график, показывающий изменение в риске столкновения в зависимости от интервала времени, в течение которого второй движущийся объект пересекает дорогу, фиг. 6(b) - это график, показывающий изменение риска столкновения в зависимости от скорости, с которой второй движущийся объект пересекает дорогу, и фиг. 6(c) - график, показывающий изменение риска столкновения в зависимости от расстояния от первого движущегося объекта до позиции, в которой второй движущийся объект пересекает дорогу.
Фиг. 7 - блок-схема последовательности операций, показывающая пример способа помощи в вождении для транспортного средства, использующего устройство помощи в вождении для транспортного средства, показанное на фиг. 1.
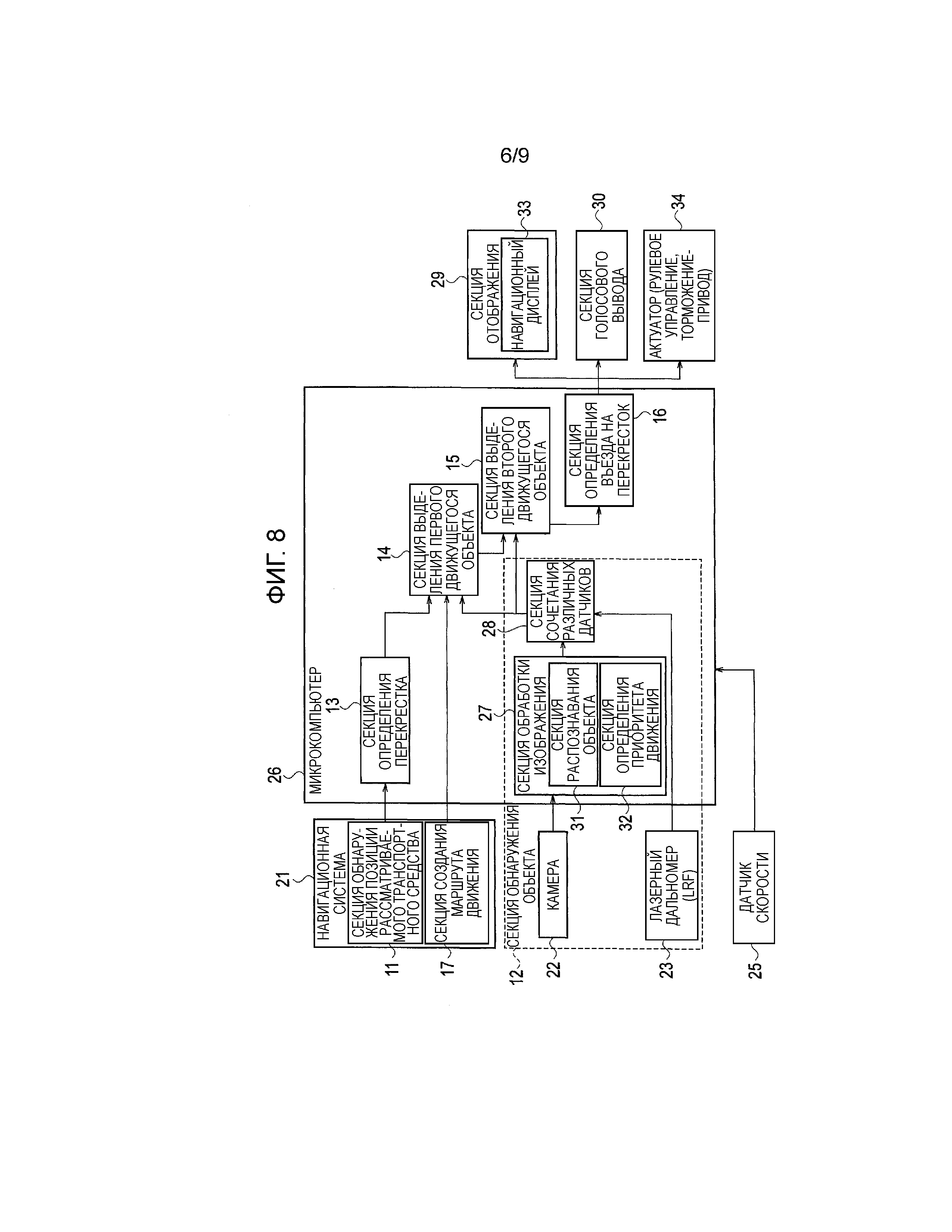
Фиг. 8 - блок-схема, показывающая конфигурацию устройства помощи в вождении для транспортного средства согласно второму варианту осуществления.
Фиг. 9 - блок-схема последовательности операций, показывающая пример способа помощи в вождении для транспортного средства, использующего устройство помощи в вождении для транспортного средства, показанное на фиг. 8.
Фиг. 10 - график, показывающий риск столкновения, когда первый движущийся объект движется по второстепенной дороге на перекрестке. Фиг. 10(a) - график, показывающий изменение риска столкновения в зависимости от интервала времени, в течение которого второй движущийся объект пересекает дорогу, и фиг. 10(b) - график, показывающий изменение в риске столкновения в зависимости от скорости, с которой второй движущийся объект пересекает дорогу.
Фиг. 11 - схематичный вид для объяснения примера средства прогнозирования риска столкновения, когда первый движущийся объект движется по второстепенной дороге на перекрестке.
Фиг. 12 - схематичный вид, показывающий въезд парковки Prk сбоку от дороги Rb.
Подробное описание вариантов осуществления
[0009] (Первый вариант осуществления)
Далее в данном документе варианты осуществления согласно настоящему изобретению будут объяснены со ссылкой на чертежи. Конфигурация устройства помощи в вождении для транспортного средства согласно первому варианту осуществления настоящего изобретения объясняется ниже со ссылкой на фиг. 1. Устройство помощи в вождении для транспортного средства согласно первому варианту осуществления настоящего изобретения предполагает использоваться для транспортного средства (рассматриваемого транспортного средства), приводимого в движение посредством действия водителя.
[0010] Рассматриваемое транспортное средство оборудуется навигационной системой 21 с помощью системы глобального позиционирования (GPS), чтобы получать позиционную информацию рассматриваемого транспортного средства, камерой 22 для формирования изображения периферийной области, простирающейся в горизонтальном направлении, включающей в себя переднюю сторону рассматриваемого транспортного средства, лазерным дальномером (LRF) 23 для обнаружения объектов, присутствующих в периферийной области, простирающейся в горизонтальном направлении, включающей в себя переднюю сторону рассматриваемого транспортного средства, сигналом 24 поворота, задействуемым водителем, чтобы указывать направление, в котором рассматриваемое транспортное средство поворачивает на перекрестке, датчиками 25 скорости для обнаружения скорости рассматриваемого транспортного средства, микрокомпьютером 26, служащим в качестве секции определения, чтобы определять, может ли рассматриваемое транспортное средство въезжать на перекресток, секцией 29 отображения для уведомления водителя о результате определения микрокомпьютера 26 в качестве визуальной информации и секцией 30 голосового вывода для уведомления водителя о результате определения микрокомпьютера 26 в качестве акустической информации.
[0011] Пример компоновки составляющих элементов, показанных на фиг. 1, установленных в рассматриваемом транспортном средстве, объясняется со ссылкой на фиг. 2. Лазерный дальномер 23 для обнаружения объектов, присутствующих в периферийной области, включающей в себя переднюю сторону рассматриваемого транспортного средства, устанавливается рядом с передним бампером. Датчики 25 скорости находятся рядом с двумя задними колесами (ходовыми колесами) рассматриваемого транспортного средства. Микрокомпьютер 26 и камера 22 устанавливаются во внутреннем пространстве рассматриваемого транспортного средства. Навигационная система 21 и навигационный дисплей 33 устанавливаются в приборной панели во внутреннем пространстве рассматриваемого транспортного средства. Камера 22 формирует изображение периферийной области, включающей в себя переднюю сторону рассматриваемого транспортного средства. Датчики 25 скорости подсчитывают число оборотов ходовых колес и умножают число оборотов на предварительно определенную длину окружности колеса с тем, чтобы получать скорость рассматриваемого транспортного средства. Сигнал 24 поворота предусматривается на колонке рулевого управления. Хотя фиг. 2 иллюстрируется с примером, когда составляющие элементы, показанные на фиг. 1, установлены в электрическом транспортном средстве (рассматриваемом транспортном средстве), использующем электромотор 36 в качестве источника приводной мощности, составляющие элементы, показанные на фиг. 1, могут быть установлены в транспортном средстве, использующем двигатель в качестве источника приводной мощности.
[0012] Обращаясь к фиг. 1, устройство помощи в вождении для транспортного средства согласно первому варианту осуществления включает в себя секцию 11 обнаружения позиции рассматриваемого транспортного средства, секцию 12 обнаружения объекта, секцию 13 определения перекрестка, секцию 14 выделения первого движущегося объекта, секцию 15 выделения второго движущегося объекта и секцию 16 определения въезда на перекресток. Секция 11 обнаружения позиции рассматриваемого транспортного средства обнаруживает текущую позицию рассматриваемого транспортного средства на карте. Секция 12 обнаружения объекта обнаруживает объекты, присутствующие на периферии рассматриваемого транспортного средства. Секция 13 определения перекрестка определяет, находится ли рассматриваемое транспортное средство в предварительно определенной области от перекрестка без светофора, где две или более дорог пересекаются, на основе текущей позиции, обнаруженной посредством секции 11 обнаружения позиции рассматриваемого транспортного средства. Секция 14 выделения первого движущегося объекта выделяет, из объектов, обнаруженных посредством секции 12 обнаружения объекта, первый движущийся объект, который может приходить в столкновение с рассматриваемым транспортным средством, когда рассматриваемое транспортное средство въезжает на перекресток, когда секция 13 определения перекрестка определяет, что рассматриваемое транспортное средство находится в предварительно определенной области от перекрестка. Секция 15 выделения второго движущегося объекта выделяет, из объектов, обнаруженных посредством секции 12 обнаружения объекта, второй движущийся объект, который пересекает дорогу, по которой первый движущийся объект едет между рассматриваемым транспортным средством и первым движущимся объектом, когда первый движущийся объект выделен посредством секции 14 выделения первого движущегося объекта. Секция 15 выделения второго движущегося объекта получает информацию о движении второго движущегося объекта, пересекающего перекресток. Секция 16 определения въезда на перекресток определяет, что рассматриваемое транспортное средство может въезжать на перекресток, когда секция 15 выделения второго движущегося объекта получает информацию о движении второго движущегося объекта, пересекающего перекресток.
[0013] Работа секции 11 обнаружения позиции рассматриваемого транспортного средства осуществляется посредством навигационной системы 21. Секция 12 обнаружения объекта включает в себя камеру 22, секцию 27 обработки изображения, которая обрабатывает изображения, полученные посредством камеры 22, лазерный дальномер (LRF) 23 и секцию 28 сочетания различных датчиков, которая объединяет результат обработки, полученный посредством секции 27 обработки изображения, и результат обнаружения, полученный посредством лазерного дальномера (LRF) 23.
[0014] Секция 27 обработки изображения включает в себя секцию 31 распознавания объекта, которая выполняет процесс обнаружения краев на изображениях, полученных посредством камеры 22, чтобы обнаруживать объекты, включающие в себя трехмерные объекты, в изображениях. Отметим, что диапазон обнаружения объекта лазерного дальномера (LRF) 23 необязательно согласуется с диапазоном формирования изображения камеры 22. Секция 28 сочетания различных датчиков маркирует объекты, обнаруженные посредством лазерного дальномера (LRF) 23 на основе результата распознавания объекта, полученного с помощью камеры 22. Секция 28 сочетания различных датчиков дополнительно выполняет процесс сочетания различных датчиков по маркированным объектам с тем, чтобы отслеживать объекты с помощью лазерного дальномера (LRF) 23 в случае, когда маркированные объекты выходят из диапазона формирования изображения камеры 22.
[0015] Секция 27 обработки изображения, секция 28 сочетания различных датчиков, секция 13 определения перекрестка, секция 14 выделения первого движущегося объекта, секция 15 выделения второго движущегося объекта и секция 16 определения въезда на перекресток, описанные выше, составляют функции микрокомпьютера 26, установленного на транспортном средстве, реализованного таким образом, чтобы выполнять компьютерные программы, предварительно установленные в микрокомпьютере 26. Компьютерные программы включают в себя программу для работы микрокомпьютера 26 в качестве контроллера для секции 29 отображения и секции 30 голосового вывода.
[0016] В качестве примера того, как определить, находится ли рассматриваемое транспортное средство в предварительно определенной области от перекрестка, секция 13 определения перекрестка определяет, достигает ли рассматриваемое транспортное средство перекрестка как цели для определения въезда в предварительно определенном периоде времени, на основе картографической информации, полученной посредством навигационной системы 21, текущей позиции рассматриваемого транспортного средства и скорости рассматриваемого транспортного средства. Альтернативно, секция 13 определения перекрестка может определять, является ли расстояние от текущей позиции рассматриваемого транспортного средства до перекрестка как цели для определения въезда предварительно определенным расстоянием или меньшим. Здесь, перекресток как цель для определения въезда предполагает быть точкой, где множество дорог пересекаются, но регулирование дорожного движения не управляется посредством внешней инфраструктуры, такой как перекресток, где две или более дорог пересекаются, включая в себя слияние трех дорог, слияние четырех дорог и слияние множества дорог, без светофора. Кроме того, как показано на фиг. 12, въезд на парковку Prk сбоку от дороги Rb также рассматривается как точка, где множество дорог пересекаются, и намечается для определения въезда. Присутствие или отсутствие светофора может быть обнаружено посредством секции 27 обработки изображения, а главная дорога и второстепенная дорога на перекрестке могут быть выделены таким образом, чтобы распознавать дорожную разметку или указательные знаки. В настоящем варианте осуществления секция 13 определения перекрестка получает картографическую информацию от навигационной системы 21 и определяет наличие или отсутствие светофора и главную или второстепенную дорогу на перекрестке соответствующим образом.
[0017] Секция 14 выделения первого движущегося объекта выделяет первый движущийся объект в зависимости от направления движения рассматриваемого транспортного средства на перекрестке. Прежде всего, секция 14 выделения первого движущегося объекта определяет направление, в котором рассматриваемое транспортное средство движется. В настоящем варианте осуществления секция 14 выделения первого движущегося объекта определяет направление движения рассматриваемого транспортного средства на перекрестке на основе сигнала указателя направления, задействованного водителем рассматриваемого транспортного средства. Например, как показано на фиг. 3, секция 14 выделения первого движущегося объекта определяет направление движения рассматриваемого транспортного средства V01 на перекрестке Crs в зависимости от состояния сигнала 24 поворота, когда рассматриваемое транспортное средство V01 останавливается на стоп-линии ST перед перекрестком Crs. Когда водитель задействует сигнал 24 поворота, чтобы указывать поворот налево, секция 14 выделения первого движущегося объекта определяет, что направлением движения рассматриваемого транспортного средства V01 является налево. Когда сигнал 24 поворота не был задействован в течение предварительно определенного периода времени перед или после того, как рассматриваемое транспортное средство V01 останавливается на стоп-линии ST, секция 14 выделения первого движущегося объекта определяет, что рассматриваемое транспортное средство V01 движется прямо.
[0018] Когда определяется, что рассматриваемое транспортное средство поворачивает налево, секция 14 выделения первого движущегося объекта выделяет, в качестве первого движущегося объекта, движущийся объект, подъезжающий ближе к перекрестку Crs справа по главной дороге Rb, пересекающей второстепенную дорогу Ra, по которой движется рассматриваемое транспортное средство. Когда определяется, что рассматриваемое транспортное средство движется прямо, секция 14 выделения первого движущегося объекта выделяет, в качестве первого движущегося объекта, движущийся объект, подъезжающий ближе к перекрестку Crs справа или слева по дороге Rb. Когда определяется, что рассматриваемое транспортное средство поворачивает направо, секция 14 выделения первого движущегося объекта выделяет, в качестве первого движущегося объекта, движущийся объект, подъезжающий ближе к перекрестку Crs справа или слева по дороге Rb или подъезжающий ближе к перекрестку Crs с противоположной стороны дороги Ra.
[0019] Когда множество движущихся объектов подъезжают ближе к перекрестку Crs в одном и том же направлении по дороге Ra или дороге Rb, такие как движущиеся объекты V02 и V03, показанные на фиг. 3, секция 14 выделения первого движущегося объекта выделяет соответствующие движущиеся объекты V02 и V03 в качестве первого движущегося объекта, пока каждый из множества движущихся объектов обнаруживается как объект посредством лазерного дальномера (LRF) 23.
[0020] Когда секция 14 выделения первого движущегося объекта выделяет множество первых движущихся объектов (таких как V02 и V03), секция 15 выделения второго движущегося объекта выделяет второй движущийся объект относительно каждого из первых движущихся объектов V02 и V03. Секция 15 выделения второго движущегося объекта может выделять множество вторых движущихся объектов относительно одного первого движущегося объекта.
[0021] Далее, "второй движущийся объект, пересекающий дорогу, по которой движется первый движущийся объект, между рассматриваемым транспортным средством и первым движущимся объектом", выделенный посредством секции 15 выделения второго движущегося объекта, объясняется подробно ниже со ссылкой на фиг. 3 и фиг. 4.
[0022] Первый движущийся объект V02, показанный на фиг. 3, как предполагается, двигается прямо через перекресток Crs. Секция 12 обнаружения объекта обнаружила объект (транспортное средство J01), подъезжающий ближе к перекрестку Crs с противоположной стороны от первого движущегося объекта V02 и намеревающийся повернуть направо на перекрестке Crs. Кроме того, секция 12 обнаружения объекта обнаружила объект (пешехода J02), пересекающий, между первым движущимся объектом V02 и перекрестком Crs, дорогу Rb, по которой движется первый движущийся объект V02. В этом случае секция 15 выделения второго движущегося объекта выделяет каждый из транспортного средства J01 и пешехода J02 в качестве второго движущегося объекта, пересекающего дорогу, по которой движется первый движущийся объект V02, между рассматриваемым транспортным средством V01 и первым движущимся объектом V02. Здесь, намерение того, что транспортное средство J01 поворачивает направо, может быть определено таким способом, что секция 27 обработки изображения анализирует состояние сигнала поворота транспортного средства J01 или замедление транспортного средства J01.
[0023] Первый движущийся объект V03, показанный на фиг. 4, который выделен посредством секции 14 выделения первого движущегося объекта в качестве первого движущегося объекта, предполагает двигаться прямо через перекресток Crs. Секция 12 обнаружения объекта обнаружила объект (транспортное средство V02), достигающий перекрестка Crs прежде первого движущегося объекта V03 в том же направлении, что и первый движущийся объект V03, и намеревающийся повернуть налево на перекрестке Crs. В этом случае, секция 15 выделения второго движущегося объекта выделяет транспортное средство V02 в качестве второго движущегося объекта, пересекающего дорогу, по которой движется первый движущийся объект V03, между рассматриваемым транспортным средством V01 и первым движущимся объектом V03. Секция 15 выделения второго движущегося объекта затем получает информацию о движении второго движущегося объекта, пересекающего перекресток. Примеры информации о движении второго движущегося объекта, пересекающего перекресток, включают в себя интервал времени, в течение которого второй движущийся объект пересекает дорогу, по которой движется первый движущийся объект, между рассматриваемым транспортным средством и первым движущимся объектом, скорость, с которой второй движущий объект пересекает дорогу, и расстояние между первым движущимся объектом и позицией, в которой второй движущийся объект пересекает дорогу, по которой первый движущийся объект движется. Информация о движении второго движущегося объекта, пересекающего перекресток, может быть получена по анализу изображения посредством секции 27 обработки изображения или получена посредством навигационной системы 21.
[0024] Секция 16 определения въезда на перекресток прогнозирует риск столкновения рассматриваемого транспортного средства с первым движущимся объектом на основе информации о движении второго движущегося объекта, пересекающего перекресток, так, чтобы определять, может ли рассматриваемое транспортное средство въезжать на перекресток, на основе спрогнозированного риска столкновения. Второй движущийся объект находится ближе к первому движущемуся объекту, чем рассматриваемое транспортное средство, и пересекает дорогу, по которой движется первый движущийся объект. Поэтому, второй движущийся объект предпринимает действие, чтобы пересекать дорогу, в то же время, принимая во внимание присутствие первого движущегося объекта. Соответственно, информация о движении второго движущегося объекта, пересекающего перекресток, может быть использована с высокой достоверностью для определения возможности столкновения с первым движущимся объектом.
[0025] В качестве первого способа, секция 16 определения въезда на перекресток определяет, въезжать ли на перекресток, в зависимости от интервала времени, в течение которого второй движущийся объект пересекает дорогу, по которой движется первый движущийся объект, между рассматриваемым транспортным средством и первым движущимся объектом, или в зависимости от скорости, с которой второй движущийся объект пересекает перекресток.
[0026] В частности, в случае, когда обнаруженный первый движущийся объект движется на перекрестке по главной дороге, секция 16 определения въезда на перекресток прогнозирует, что риск столкновения с первым движущимся объектом является более низким, поскольку интервал времени, в течение которого второй движущийся объект пересекает дорогу, по которой движется первый движущийся объект, между рассматриваемым транспортным средством и первым движущимся объектом, продолжительнее, или поскольку скорость, с которой второй движущийся объект пересекает перекресток, является более низкой, как показано на фиг. 6(a) и фиг. 6(b). Когда спрогнозированный риск столкновения меньше предварительно определенного порогового значения, секция 16 определения въезда на перекресток определяет, что рассматриваемое транспортное средство может въезжать на перекресток. Когда спрогнозированный риск столкновения равен предварительно определенному пороговому значению или больше, секция 16 определения въезда на перекресток определяет, что рассматриваемое транспортное средство не должно въезжать на перекресток.
[0027] Например, как показано на фиг. 5, секция 16 определения въезда на перекресток определяет, въезжать ли на перекресток, в зависимости от времени, требуемого для прохождения вторых движущихся объектов (J01, J02) через полосу R, имеющую ширину d, по которой движется первый движущийся объект V02 (время прохождения), или в зависимости от скорости, с которой вторые движущиеся объекты (J01, J02) проходят через полосу R, имеющую ширину d (скорость прохождения). Когда время прохождения является более длительным, или скорость прохождения является более низкой, вторые движущиеся объекты (J01, J02) как предполагается, пересекают полосу R, в то время как определяется, что возможность столкновения с первым движущимся объектом V02 является более низкой. Соответственно, риск столкновения с рассматриваемым транспортным средством V01, находящимся дальше вторых движущихся объектов (J01, J02) от первого движущегося объекта V02, может также быть оценен как низкий.
[0028] В случае, когда обнаруженный первый движущийся объект движется на перекрестке по второстепенной дороге, секция 16 определения въезда на перекресток прогнозирует, что риск столкновения с первым движущимся объектом является более низким, когда интервал времени, в течение которого второй движущийся объект пересекает дорогу, по которой движется первый движущийся объект, между рассматриваемым транспортным средством и первым движущимся объектом, является более коротким, или когда скорость, с которой второй движущийся объект пересекает перекресток, является более высокой, как показано на фиг. 10(a) и фиг. 10(b).
[0029] Например, как показано на фиг. 11, рассматриваемое транспортное средство V01 движется по направлению к перекрестку Crs по главной дороге Rb. Секция 14 выделения первого движущегося объекта выделяет, в качестве первого движущегося объекта, транспортное средство V02, въезжающее на перекресток Crs по второстепенной дороге Ra и намеревающееся повернуть направо на перекрестке Crs. Транспортное средство J01 достигает перекрестка Crs прежде рассматриваемого транспортного средства V01 в том же направлении, что и рассматриваемое транспортное средство V01, и намеревается повернуть направо на перекрестке Crs. Транспортное средство J02 достигает перекрестка Crs прежде рассматриваемого транспортного средства V01 с противоположной стороны от рассматриваемого транспортного средства V01 и движется прямо через перекресток Crs. Секция 15 выделения второго движущегося объекта выделяет каждое из транспортного средства J01 и транспортного средства J02, когда второй движущийся объект пересекает, между рассматриваемым транспортным средством V01 и первым движущимся объектом V02, маршрут Trs движения, по которому движется первый движущийся объект V02.
[0030] Секция 16 определения въезда на перекресток определяет, въезжать ли на перекресток, в зависимости от времени, требуемого для прохождения вторых движущихся объектов (J01, J02) через маршрут Trs движения, имеющий ширину d, по которому первый движущийся объект V02 движется (время прохождения), или в зависимости от скорости, с которой вторые движущиеся объекты (J01, J02) проходят через маршрут Trs движения, имеющий ширину d (скорость прохождения). Когда время прохождения является более коротким, или скорость прохождения более значительная, вторые движущиеся объекты (J01, J02) предполагают пройти через маршрут Trs движения, в то время как определяется, что первый движущийся объект V02 на второстепенной дороге не въезжает на перекресток, так что возможность столкновения с первым движущимся объектом V02 более низкая. Соответственно, риск столкновения с рассматриваемым транспортным средством V01, находящимся дальше вторых движущихся объектов (J01, J02) от первого движущегося объекта V02, может также быть оценен как низкий.
[0031] В качестве второго способа, секция 16 определения въезда на перекресток определяет, въезжать ли на перекресток, в зависимости от расстояния между первым движущимся объектом и позицией, в которой второй движущийся объект пересекает дорогу, по которой движется первый движущийся объект.
[0032] В частности, как показано на фиг. 5, когда позиция, где второй движущийся объект J02 пересекает дорогу Rb, по которой движется первый движущийся объект V02, находится ближе к первому движущемуся объекту V02, т.е., когда расстояние L между первым движущимся объектом V02 и позицией, где второй движущийся объект J02 пересекает дорогу Rb, по которой движется первый движущийся объект V02, является более коротким, интервал времени, в течение которого рассматриваемое транспортное средство V01 ожидает въезда на перекресток Crs, является более длительным, так что рассматриваемое транспортное средство V01 имеет достаточно времени для въезда на перекресток Crs. Соответственно, как показано на фиг. 6(c), секция 16 определения въезда на перекресток прогнозирует, что риск столкновения с первым движущимся объектом V02 является более низким, когда расстояние L более короткое.
[0033] Секция 16 определения въезда на перекресток может прогнозировать риск столкновения посредством либо первого способа, либо второго способа, или прогнозировать риск столкновения посредством комбинации первого способа и второго способа. Например, риск столкновения может быть спрогнозирован таким образом, чтобы умножать риск столкновения (f1), полученный посредством первого способа, и риск столкновения (f2), полученный посредством второго способа, взвешивая коэффициенты (α1/α1+α2, α2/α1+α2) так, чтобы получать их среднее значение.
[0034] Отметим, что, когда секция 14 выделения первого движущегося объекта выделяет множество первых движущихся объектов, или когда секция 15 выделения второго движущегося объекта выделяет множество вторых движущихся объектов относительно одного первого движущегося объекта, секция 16 определения въезда на перекресток определяет, может ли рассматриваемое транспортное средство въезжать на перекресток, на основе наивысшего риска столкновения. Секция 16 определения въезда на перекресток определяет, что рассматриваемое транспортное средство может въезжать на перекресток, когда наивысший риск столкновения меньше предварительно определенного порогового значения, и секция 16 определения въезда на перекресток определяет, что рассматриваемое транспортное средство не должно въезжать на перекресток, когда наивысший риск столкновения равен предварительно определенному пороговому значению или больше. В результате, может быть выполнено определение с высокой степенью безопасности.
[0035] Далее, пример способа помощи в вождении для транспортного средства, использующего устройство помощи в вождении для транспортного средства, показанного на фиг. 1, объясняется ниже со ссылкой на фиг. 7. Процесс, показанный в блок-схеме последовательности операций на фиг. 7, повторяется в течение предварительно определенного цикла выборки.
[0036] На этапе S01 секция 11 обнаружения позиции рассматриваемого транспортного средства обнаруживает текущую позицию рассматриваемого транспортного средства на карте с помощью навигационной системы 21. Секция 12 обнаружения объекта обнаруживает объекты, присутствующие на периферии рассматриваемого транспортного средства, с помощью камер 22 и лазерного дальномера (LRF) 23.
[0037] Переходя к секции S02, секция 13 определения перекрестка определяет, на основе текущей позиции на карте и картографических данных, находится ли рассматриваемое транспортное средство в предварительно определенной области от перекрестка без светофора, где две или более дорог пересекаются. Процесс переходит к этапу S03, когда рассматриваемое транспортное средство останавливается ("да" на этапе S02), или процесс в блок-схеме последовательности операций на фиг. 7 заканчивается, когда рассматриваемое транспортное средство не останавливается ("нет" на этапе S02).
[0038] На этапе S03 секция 14 выделения первого движущегося объекта определяет направление движения рассматриваемого транспортного средства на перекрестке согласно задействованию сигнала 24 поворота водителем. В частности, секция 14 выделения первого движущегося объекта определяет, поворачивать ли налево, поворачивать ли направо или ехать прямо вперед, когда перекресток является соединением четырех дорог. Переходя к этапу S04, секция 14 выделения первого движущегося объекта выделяет первый движущийся объект из объектов, обнаруженных на этапе S01, согласно направлению движения рассматриваемого транспортного средства. Одновременно с этим выделением секция 14 выделения первого движущегося объекта ссылается на результат обнаружения и картографические данные и маркирует первый движущийся объект, чтобы указывать, с какой дорогой связан первый движущийся объект, главной дорогой или второстепенной дорогой. Процесс переходит к этапу S06, когда первый движущийся объект присутствует ("да" на этапе S04), или секция 14 определения въезда на перекресток определяет, что рассматриваемое транспортное средство может въезжать на перекресток, когда первый движущийся объект не присутствует ("нет" на этапе S04), и процесс переходит к этапу S05.
[0039] На этапе S05 секция 29 отображения отображает, на навигационном дисплее 33, визуальную информацию, чтобы уведомлять водителя о том, что рассматриваемое транспортное средство может въезжать на перекресток в соответствии с управлением посредством микрокомпьютера 26. Секция 30 голосового вывода выводит акустическую информацию, чтобы уведомлять водителя о том, что рассматриваемое транспортное средство может въезжать на перекресток в соответствии с управлением посредством микрокомпьютера 26.
[0040] На этапе S06 секция 15 выделения второго движущегося объекта выделяет второй движущийся объект из объектов, обнаруженных на этапе S01. Когда второй движущийся объект присутствует ("да" на этапе S06), секция 15 выделения второго движущегося объекта получает информацию о движении второго движущегося объекта, пересекающего перекресток, и процесс переходит к этапу S08. Когда второй движущийся объект не обнаружен ("нет" на этапе S06), а первый движущийся объект, с которым рассматриваемое транспортное средство может прийти в столкновение, все еще обнаруживается, секция 16 определения въезда на перекресток определяет, что рассматриваемое транспортное средство должно остановиться на перекрестке, хотя второй движущийся объект не выделяется, поскольку препятствие было обнаружено, с которым рассматриваемое транспортное средство может прийти в столкновение, если рассматриваемое транспортное средство въезжает на перекресток, и процесс переходит к этапу S07.
[0041] На этапе S07 секция 29 отображения отображает, на навигационном дисплее 33, визуальную информацию, чтобы уведомлять водителя о том, что "рассматриваемое транспортное средство должно остановиться на перекрестке, поскольку препятствие было обнаружено, с которым рассматриваемое транспортное средство может прийти в столкновение", в соответствии с управлением посредством микрокомпьютера 26. Секция 30 голосового вывода выводит акустическую информацию, чтобы уведомлять водителя о том, что "рассматриваемое транспортное средство должно остановиться на перекрестке, поскольку препятствие было обнаружено, с которым рассматриваемое транспортное средство может прийти в столкновение", в соответствии с управлением посредством микрокомпьютера 26.
[0042] На этапе S08 секция 16 определения въезда на перекресток прогнозирует риск столкновения с первым движущимся объектом на основе информации о движении второго движущегося объекта, пересекающего перекресток. Информация о движении второго движущегося объекта, пересекающего перекресток, включает в себя вышеописанное время проезда, скорость проезда и расстояние между первым движущимся объектом и вторым движущимся объектом.
[0043] Переходя к этапу S09, секция 16 определения въезда на перекресток определяет, может ли рассматриваемое транспортное средство въезжать на перекресток, на основе спрогнозированного риска столкновения. Когда спрогнозированный риск столкновения меньше предварительно определенного порогового значения ("да" на этапе S09), секция 16 определения въезда на перекресток определяет, что рассматриваемое транспортное средство может въезжать на перекресток, и процесс переходит к этапу S11. Когда спрогнозированный риск столкновения равен предварительно определенному пороговому значению или больше ("нет" на этапе S09), секция 16 определения въезда на перекресток определяет, что рассматриваемое транспортное средство не должно въезжать на перекресток, и процесс переходит к этапу S10.
[0044] На этапе S10 визуальная информация и акустическая информация выводятся, чтобы уведомлять водителя о том, что "рассматриваемое транспортное средство должно остановиться на перекрестке, поскольку было обнаружено препятствие, с которым рассматриваемое транспортное средство может приходить в столкновение", как в случае этапа S07.
[0045] На этапе S11 визуальная информация и акустическая информация выводятся, чтобы уведомлять водителя о том, что рассматриваемое транспортное средство может въезжать на перекресток, как в случае этапа S05.
[0046] Здесь, уведомляющая информация, выводимая каждый раз, когда определение о том, что рассматриваемое транспортное средство может въезжать на перекресток, выполняется на этапе S05 и этап S11, может раздражать водителя. Таким образом, уведомление необязательно выводится, когда рассматриваемое транспортное средство въезжает на перекресток, после того как определение о том, что рассматриваемое транспортное средство может въезжать на перекресток, выполняется на этапе S05 и этапе S11. Когда рассматриваемое транспортное средство въезжает на перекресток после определения о том, что рассматриваемое транспортное средство должно остановиться на перекрестке, выполняется на этапе S07 и этапе S10, предупреждающий звук или голосовое уведомление может быть выведено в подтверждение определения.
[0047] Как описано выше, первый вариант осуществления настоящего изобретения может обеспечивать следующие результаты работы.
[0048] Когда секция 16 определения въезда на перекресток получает информацию о движении второго движущегося объекта, пересекающего перекресток, секция 16 определения въезда на перекресток определяет, что рассматриваемое транспортное средство может въезжать на перекресток. Второй движущийся объект, выделенный посредством секции 15 выделения второго движущегося объекта, находится ближе к первому движущемуся объекту, чем рассматриваемое транспортное средство, и пересекает дорогу, по которой движется первый движущийся объект. Поэтому, второй движущийся объект предпринимает действие, чтобы пересекать дорогу, в то же время принимая во внимание присутствие первого движущегося объекта. Соответственно, информация о движении второго движущегося объекта, пересекающего перекресток, может быть использована с высокой достоверностью для определения возможности столкновения с первым движущимся объектом. Соответственно, секция 16 определения въезда на перекресток может определять, въезжать ли на перекресток, с высокой достоверностью без помощи информации об ускорении объектов.
[0049] Когда первый движущийся объект находится на второстепенной дороге, секция 16 определения въезда на перекресток прогнозирует, что риск столкновения с первым движущимся объектом является более низким, когда интервал времени, в течение которого второй движущийся объект пересекает дорогу, по которой движется первый движущийся объект, между рассматриваемым транспортным средством и первым движущимся объектом, является более длительным, или когда скорость, с которой второй движущийся объект пересекает перекресток, является более низкой. Когда интервал времени, в течение которого второй движущийся объект пересекает дорогу, по которой движется первый движущийся объект, между рассматриваемым транспортным средством и первым движущимся объектом, является более длительным, или когда скорость, с которой второй движущийся объект пересекает перекресток, является более низкой, второй движущийся объект может предполагать принятие действия, в то время как определяется, что возможность столкновения с первым движущимся объектом является более низкой. Когда первый движущийся объект находится на главной дороге, секция 16 определения въезда на перекресток прогнозирует, что риск столкновения с первым движущимся объектом является более низким, когда интервал времени, в течение которого второй движущийся объект пересекает дорогу, по которой движется первый движущийся объект, между рассматриваемым транспортным средством и первым движущимся объектом, является более коротким, или когда скорость, с которой второй движущийся объект пересекает перекресток, является более высокой. Когда интервал времени, в течение которого второй движущийся объект пересекает дорогу, по которой движется первый движущийся объект, между рассматриваемым транспортным средством и первым движущимся объектом, является более коротким, или когда скорость, с которой второй движущийся объект пересекает перекресток, является более высокой, второй движущийся объект может предполагать принятие действия, в то время как определяется, что возможность столкновения с первым движущимся объектом является более низкой. Поэтому риск столкновения с рассматриваемым транспортным средством, находящимся дальше второго движущегося объекта от первого движущегося объекта, может также быть оценен как низкий. Соответственно, риск столкновения может быть спрогнозирован с высокой точностью.
[0050] Когда позиция, в которой второй движущийся объект пересекает дорогу, по которой движется первый движущийся объект, между рассматриваемым транспортным средством и первым движущимся объектом, находится ближе к первому движущемуся объекту, интервал времени, в течение которого рассматриваемое транспортное средство V01 ожидает въезда на перекресток, является более продолжительным, так что рассматриваемое транспортное средство имеет достаточно времени, чтобы въезжать на перекресток. Поэтому, риск столкновения с рассматриваемым транспортным средством может также быть оценен как низкий. Соответственно, риск столкновения может быть спрогнозирован с высокой точностью.
[0051] В случае, когда секция 14 выделения первого движущегося объекта выделяет множество первых движущихся объектов, или секция 15 выделения второго движущегося объекта выделяет множество вторых движущихся объектов относительно одного первого движущегося объекта, секция 16 определения въезда на перекресток определяет, что рассматриваемое транспортное средство может въезжать на перекресток, когда наивысший риск столкновения меньше предварительно определенного порогового значения. Соответственно, определение безопасности может быть выполнено.
[0052] Секция 14 выделения первого движущегося объекта выделяет первый движущийся объект на основе направления движения рассматриваемого транспортного средства на перекрестке. Соответственно, точное выделение объекта может быть выполнено согласно направлению движения рассматриваемого транспортного средства.
[0053] Секция 14 выделения первого движущегося объекта определяет направление движения рассматриваемого транспортного средства на перекрестке на основе сигнала указателя направления, задействованного водителем рассматриваемого транспортного средства. Соответственно, направление движения рассматриваемого транспортного средства может быть определено точно.
(Второй вариант осуществления)
Конфигурация устройства помощи в вождении для транспортного средства согласно второму варианту осуществления настоящего изобретения объясняется ниже со ссылкой на фиг. 8. Устройство помощи в вождении для транспортного средства согласно второму варианту осуществления настоящего изобретения предполагает использоваться для транспортного средства (рассматриваемого транспортного средства), в котором ручная коррекция, выполняемая водителем, активируется постоянно, и возможно автономное вождение посредством управления каждым актуатором.
[0054] Устройство помощи в вождении для транспортного средства согласно второму варианту осуществления отличается от устройства помощи в вождении для транспортного средства согласно первому варианту осуществления, показанного на фиг. 1, в следующих моментах. Как показано на фиг. 8, устройство помощи в вождении для транспортного средства согласно второму варианту осуществления дополнительно включает в себя секцию 17 создания маршрута движения, которая создает маршрут движения рассматриваемого транспортного средства от текущей позиции рассматриваемого транспортного средства на карте, определенной посредством секции 11 определения позиции рассматриваемого транспортного средства, до пункта назначения, и актуатор 34, служащий в качестве секции управления транспортным средством, чтобы выполнять следящее управление на основе маршрута движения, созданного посредством секции 17 создания маршрута движения. Секция 12 обнаружения объекта дополнительно включает в себя секцию 32 определения приоритета движения для определения приоритета движения обнаруженных объектов.
[0055] Работа секции 17 создания маршрута движения реализуется посредством навигационной системы 21. Секция 14 выделения первого движущегося объекта определяет направление движения рассматриваемого транспортного средства на перекрестке на основе маршрута движения, созданного посредством секции 17 создания маршрута движения Актуатор 34 управляет операциями рулевого управления и тормоза-привода рассматриваемого транспортного средства в зависимости от результата определения секции 16 определения въезда на перекресток в соответствии с управлением посредством микрокомпьютера 26.
[0056] Секция 32 определения приоритета движения составляет часть секции 27 обработки изображения для анализа изображений, полученных посредством камеры 22 в секции 12 обнаружения объекта. В частности, секция 32 определения приоритета движения определяет атрибут объекта, распознанного посредством секции 31 распознавания объекта, чтобы определять приоритет движения объекта согласно определенному атрибуту. Например, секция 32 определения приоритета движения определяет, к какой категории принадлежит объект, транспортному средству, велосипеду или пешеходу, в зависимости от характеристик движения или размера объекта. Секция 32 определения приоритета движения предварительно сохраняет приоритет движения для каждой категории по правилам дорожного движения и определяет приоритет движения объекта со ссылкой на приоритет движения для каждой категории. Например, велосипед имеет приоритет над транспортным средством, а пешеход имеет приоритет над велосипедом.
[0057] В первом варианте осуществления, когда секция 15 выделения второго движущегося объекта выделяет множество вторых движущихся объектов относительно одного первого движущегося объекта, секция 16 определения въезда на перекресток определяет, может ли рассматриваемое транспортное средство въезжать на перекресток, на основе наивысшего риска столкновения среди рисков столкновения множества вторых движущихся объектов, как описано выше. Во втором варианте осуществления секция 16 определения въезда на перекресток определяет, может ли рассматриваемое транспортное средство въезжать на перекресток, на основе информации о движении второго движущегося объекта, пересекающего перекресток и имеющего наивысший приоритет движения среди множества вторых движущихся объектов, определенный посредством секции 32 определения приоритета движения. Таким образом, определение того, какой второй движущийся объект имеет наивысший приоритет движения, используется предпочтительно. В частности, секция 16 определения въезда на перекресток вычисляет риск столкновения согласно информации о движении второго движущегося объекта, пересекающего перекресток и имеющего наивысший приоритет движения. Секция 16 определения въезда на перекресток определяет, что рассматриваемое транспортное средство может въезжать на перекресток, когда вычисленный риск столкновения меньше предварительно определенного порогового значения, и определяет, что рассматриваемое транспортное средство не должно въезжать на перекресток, когда вычисленный риск столкновения равен предварительно определенному пороговому значению или больше.
[0058] Пример компоновки составляющих элементов, показанных на фиг. 8, установленных в рассматриваемом транспортном средстве, объясняется со ссылкой на фиг. 2. Пример компоновки в рассматриваемом транспортном средстве во втором варианте осуществления отличается от компоновки в первом варианте осуществления в следующих моментах. Колонка рулевого управления снабжается мотором 37 электроусилителя руля (EPS) и датчиком 38 угла поворота рулевого колеса, используемым для управления углом поворота рулевого колеса. Актуатор для управления тормозящим-приводящим усилием управляет, на основе информации о скорости датчиков 25 скорости, тормозами (включающими в себя фрикционный тормоз и рекуперативный тормоз), предусмотренными на передних колесах (ведущих колесах) рассматриваемого транспортного средства, и электромотором 36. EPS-мотор 37 управляет углом поворота рулевого колеса для ведущих колес на основе результата обнаружения датчика 38 угла поворота рулевого колеса. EPS-мотор 37 и актуатор для управления тормозящим-приводящим усилием, описанные выше, включены в актуатор 34, показанный на фиг. 8.
[0059] Далее, пример способа помощи в вождении для транспортного средства, использующего устройство помощи в вождении для транспортного средства, показанного на фиг. 8, объясняется ниже со ссылкой на фиг. 9. Соответствующие этапы S31-S41, показанные на фиг. 9, соответствуют соответствующим этапам S01-S11, показанным на фиг. 7, и основной порядок действий в блок-схеме последовательности операций, показанной на фиг. 9, является таким же, что и на фиг. 7. Различия между фиг. 7 и фиг. 9 объясняются ниже.
[0060] Сначала, на этапе S31, включающем в себя получение информации о позиции рассматриваемого транспортного средства и обнаружение объектов, секция 17 создания маршрута движения создает маршрут движения рассматриваемого транспортного средства от текущей позиции рассматриваемого транспортного средства на карте, обнаруженной посредством секции 11 обнаружения позиции рассматриваемого транспортного средства, до пункта назначения. Актуатор 34 управляет рулевым колесом и операциями торможения-привода рассматриваемого транспортного средства на основе созданного маршрута движения в соответствии с управлением посредством микрокомпьютера 26. Секция 32 определения приоритета движения определяет приоритет движения обнаруженных объектов. Отметим, что маршрут движения обновляется непостоянно, а когда дорога, отличная от маршрута движения, выбирается вследствие, например, операции ручной корректировки, выполненной водителем, и когда маршрута движения невозможно физически придерживаться вследствие строительства или ограничений движения.
[0061] Поскольку автономное вождение управляется по правилам дорожного движения, запрограммированных в картографических данных, операция остановки рассматриваемого транспортного средства определяется в соответствии с правилами дорожного движения на этапе S32. Альтернативно, операция остановки рассматриваемого транспортного средства может быть определена в соответствии с операцией ручной корректировки.
[0062] На этапе S33 направление движения рассматриваемого транспортного средства определяется по маршруту движения, созданному на этапе S31.
[0063] Когда множество вторых движущихся объектов выделяются относительно одного первого движущегося объекта на этапе S36, риск въезда рассматриваемого транспортного средства прогнозируется, на этапе S38, на основе информации о движении второго движущегося объекта, имеющего наивысший приоритет движения, определенный на этапе S31. А именно, определение того, какой второй движущийся объект имеет наивысший приоритет движения по правилам дорожного движения, используется предпочтительно, в то время как результат определения атрибута, полученный на этапе S31, учитывается. Когда приоритет движения множества вторых движущихся объектов является равноценным, результат определения более высокого риска въезда предпочтительно используется, как в случае первого варианта осуществления. В частности, определение того, въезжать ли на перекресток, может быть выполнено на основе второго движущегося объекта, имеющего наивысший риск столкновения среди множества вторых движущихся объектов, имеющих равноценный приоритет движения.
[0064] На этапе S37 и этапе S40 актуатор 34 сохраняет управление остановкой. На этапе S35 и этапе S41 актуатор 34 переключается с управления остановкой на управление стартом. Альтернативно, ввиду безопасности, актуатор 34 может переключаться на управление стартом, когда принимает инструкции въезда на перекресток от водителя после уведомления водителя о том, что рассматриваемое транспортное средство может въезжать на перекресток. Например, секция 30 голосового вывода может сначала предоставлять голосовое уведомление, чтобы уведомлять водителя о том, что рассматриваемое транспортное средство может въезжать на перекресток, и затем переключаться с управления остановкой на управление стартом только после обнаружения действия водителя, такого как действие рулевого управления, действие ускорения или задействование кнопки рулевого управления. Здесь, поскольку постоянное действие ручной корректировки водителем возможно во втором варианте осуществления, рассматриваемое транспортное средство может быть остановлено после того, как действие торможения водителем обнаруживается, даже когда управление остановкой переключается на управление стартом.
[0065] Как описано выше, второй вариант осуществления настоящего изобретения может обеспечивать те же результаты работы, что и в первом варианте осуществления, и дополнительно обеспечивать следующие результаты работы.
[0066] Когда множество вторых движущихся объектов выделяются относительно одного первого движущегося объекта, секция 16 определения въезда на перекресток прогнозирует риск столкновения с первым движущимся объектом на основе информации о движении второго движущегося объекта, пересекающего перекресток и имеющего наивысший приоритет движения. Когда риск столкновения меньше предварительно определенного порогового значения, секция 16 определения въезда на перекресток определяет, что рассматриваемое транспортное средство может въезжать на перекресток. Например, информация о втором движущемся объекте, приоритет движения которого по правилам дорожного движения является наивысшим, таком как пешеход, предпочтительно используется, так что определение въезда может быть выполнено с высокой достоверностью.
[0067] Секция 14 выделения первого движущегося объекта определяет направление движения рассматриваемого транспортного средства на перекрестке на основе маршрута движения, созданного посредством секции 17 создания маршрута движения. Соответственно, направление движения рассматриваемого транспортного средства может быть определено точно.
[0068] Актуатор 34, служащий в качестве секции управления транспортным средством, выполняет следящее управление на основе маршрута движения, созданного посредством секции 17 создания маршрута движения, в соответствии с результатом определения, полученным посредством секции 16 определения въезда на перекресток. Таким образом, безопасное управление транспортным средством может поддерживаться до тех пор, пока рассматриваемое транспортное средство не достигнет пункта назначения на основе определения въезда с высокой надежностью посредством секции 16 определения въезда на перекресток.
[0069] Хотя настоящее изобретение было описано выше посредством ссылки на варианты осуществления, настоящее изобретение не ограничивается этим, и специалистам в области техники будет очевидно, что различные модификации и улучшения могут быть выполнены.
[0070] Полное содержимое японской патентной заявки № P2013-150136 (зарегистрированной 19 июля 2013 года) включено в данный документ по ссылке.
Список ссылочных позиций
[0071] 11 Секция обнаружения позиции рассматриваемого транспортного средства
12 Секция обнаружения объекта
13 Секция определения перекрестка
14 Секция выделения первого движущегося объекта
15 Секция выделения второго движущегося объекта
16 Секция определения въезда на перекресток
17 Секция создания маршрута движения
22 Камера (секция обнаружения объекта)
23 Лазерный дальномер (секция обнаружения объекта)
26 Микрокомпьютер (секция определения)
31 Секция распознавания объекта (секция обнаружения объекта)
32 Секция определения приоритета движения
34 Актуатор (секция управления транспортным средством)
L расстояние
V01 Рассматриваемое транспортное средство
Реферат
Изобретение относится к устройствам помощи в вождении для транспортного средства и способам помощи в вождении для транспортного средства. Устройство помощи в вождении для транспортного средства включает в себя секцию (12) обнаружения объекта для обнаружения объектов, присутствующих на периферии рассматриваемого транспортного средства, и определяет, находится ли рассматриваемое транспортное средство в предварительно определенной области от перекрестка (Crs). Устройство помощи в вождении для транспортного средства выделяет, из объектов, обнаруженных посредством секции (12) обнаружения объекта, первый движущийся объект (V02, V03), который может приходить в столкновение с рассматриваемым транспортным средством, когда рассматриваемое транспортное средство въезжает на перекресток (Crs). Устройство помощи в вождении для транспортного средства выделяет, из объектов, обнаруженных посредством секции (12) обнаружения объекта, второй движущийся объект (J01, J02), пересекающий дорогу, по которой движется первый движущийся объект (V02, V03), между рассматриваемым транспортным средством и первым движущимся объектом и получает информацию о движении второго движущегося объекта (J01, J02), пересекающего перекресток. Устройство помощи в вождении для транспортного средства определяет, что рассматриваемое транспортное средство может въезжать на перекресток (Crs), когда получает информацию о движении второго движущегося объекта (J01, J02), пересекающего перекресток. Обеспечивается разрешение въезда рассматриваемого транспортного средства на перекресток с высокой достоверностью. 2 н. и 10 з.п. ф-лы, 12 ил.
Комментарии