Система индикации состояния транспортного средства - RU2722807C1
Код документа: RU2722807C1
Чертежи







Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение в общем относится к системе индикации состояния транспортного средства. В частности, настоящее изобретение относится к системе индикации состояния транспортного средства, которая указывает состояние или намерение транспортного средства внешнему наблюдателю, например, пешеходу или удаленному транспортному средству.
УРОВЕНЬ ТЕХНИКИ
[0002] Традиционные системы индикации состояния транспортного средства включают в себя системы индикации, которые пытаются сообщить внешним наблюдателям намерение водителя транспортного средства. Например, многие транспортные средства включают в себя стоп-сигналы для указания состояния торможения транспортного средства и индикаторы сигнала поворота для указания намерения водителя транспортного средства выполнить поворот в определенном направлении.
[0003] Дополнительные системы могут включать в себя систему, которая указывает намерение транспортного средства в направлении назад удаленным транспортным средствам, находящимся сзади транспортного средства. Например, эти традиционные системы могут указывать с помощью текста, что транспортное средство находится в состоянии остановки или в состоянии медленного движения вперед.
[0004] Другие традиционные системы могут включать в себя внешнее световое устройство, указывающее направление, в котором система восприятия обнаружила пешеходов. Световые устройства перемещаются вокруг транспортного средства при движении пешеходов. Внутреннее освещение указывает, где обнаружены пешеходы, для пассажиров в транспортном средстве. Сообщения на внешней стороне автомобиля сообщают пешеходам команды «пожалуйста, идите» или «стойте».
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задачи, решаемые изобретением
[0005] Обнаружено, что для повышения понятности и предсказуемости транспортных средств, в частности, автономных транспортных средств, необходима улучшенная система индикации состояния транспортного средства. Эта система должна сообщать снаружи транспортного средства состояние транспортного средства всем возможным взаимодействующим агентам. Кроме того, эта система должна способствовать гибкости во взаимодействиях на основе входных данных от системы восприятия или обнаружения транспортного средства, истории взаимодействия транспортных средств и систем связи между транспортными средствами.
Средство для решения задач
[0006] С учетом известного уровня техники один аспект настоящего изобретения заключается в обеспечении системы индикации состояния транспортного средства. Система индикации состояния транспортного средства включает в себя систему обнаружения и текстовый дисплей. Система обнаружения выполнена с возможностью обнаружения внешнего движущегося объекта. Текстовый дисплей расположен на транспортном средстве с возможностью выборочной индикации снаружи транспортного средства первого состояния транспортного средства и второго состояния транспортного средства в направлении вперед транспортного средства.
Эффект изобретения
[0007] В соответствии с настоящим изобретением можно повысить понятность и предсказуемость транспортных средств.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008] Фиг. 1 представляет собой схематический вид транспортного средства с системой индикации состояния транспортного средства в соответствии с одним вариантом осуществления настоящего изобретения.
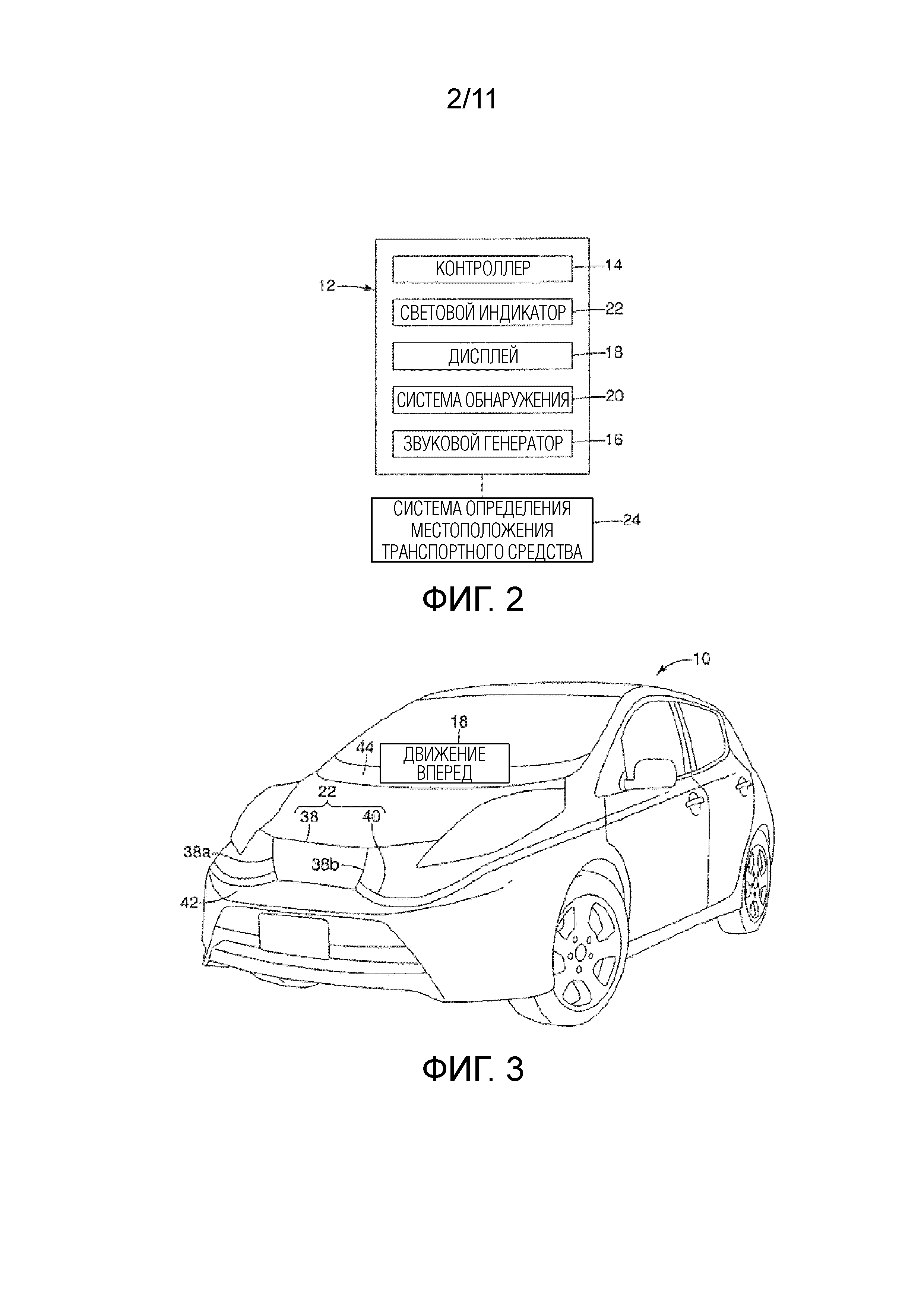
Фиг. 2 представляет собой схематический вид системы индикации состояния транспортного средства, показанной на Фиг. 1.
Фиг. 3 представляет собой вид спереди в перспективе внешнего дисплея и светового индикатора для системы индикации состояния транспортного средства, показанной на Фиг. 1.
Фиг. 4 представляет собой вид спереди в перспективе внешнего дисплея и светового индикатора для системы индикации состояния транспортного средства, показанных на Фиг. 3, указывающих направление пешехода и состояние уступания транспортного средства.
Фиг. 5 представляет собой вид спереди в перспективе внешнего дисплея и светового индикатора для системы индикации состояния транспортного средства, показанных на Фиг. 3, указывающих направление пешехода и состояние остановки транспортного средства.
Фиг. 6 представляет собой вид спереди в перспективе внешнего дисплея и светового индикатора для системы индикации состояния транспортного средства, показанных на Фиг. 3, указывающих направление пешехода и состояние ожидания транспортного средства.
Фиг. 7 представляет собой вид спереди в перспективе внешнего дисплея и светового индикатора для системы индикации состояния транспортного средства, показанных на Фиг. 3, указывающих направление нескольких пешеходов и состояние ожидания транспортного средства.
Фиг. 8 представляет собой вид спереди в перспективе внешнего дисплея и светового индикатора для системы индикации состояния транспортного средства, показанных на Фиг. 3, указывающих направление группы пешеходов и состояние ожидания транспортного средства.
Фиг. 9A представляет собой первую блок-схему, иллюстрирующую процесс индикации состояния транспортного средства системы индикации состояния транспортного средства.
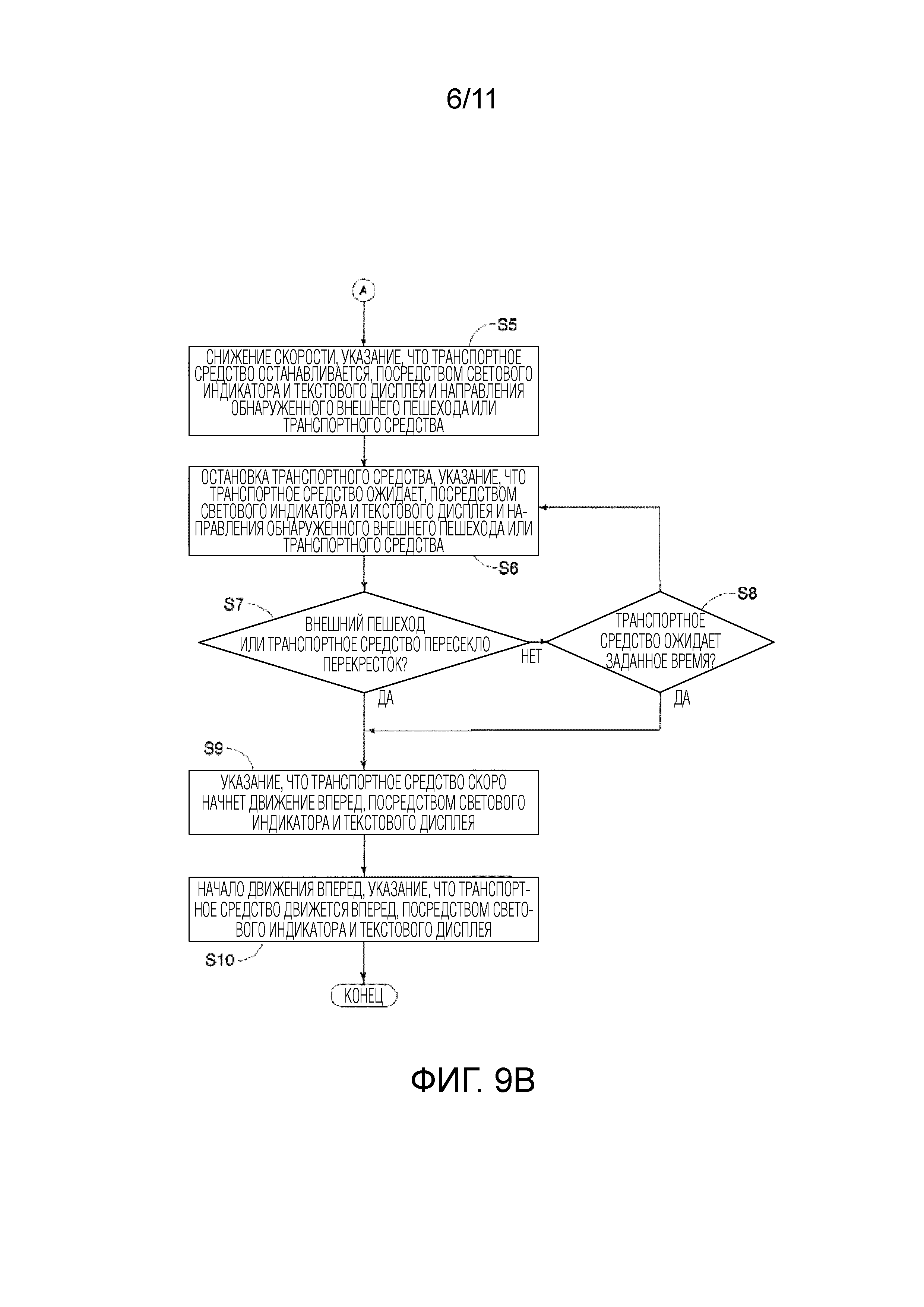
Фиг. 9B представляет собой вторую блок-схему, иллюстрирующую процесс индикации состояния транспортного средства системы индикации состояния транспортного средства.
Фиг. 10 представляет собой схематический вид в плане транспортного средства, оборудованного системой индикации состояния транспортного средства в соответствии с одним вариантом осуществления, приближающегося к перекрестку.
Фиг. 11 представляет собой схематический вид в плане транспортного средства, оборудованного системой индикации состояния транспортного средства в соответствии с одним вариантом осуществления, приближающегося к перекрестку и обнаруживающего пешехода, ожидающего на пешеходном переходе.
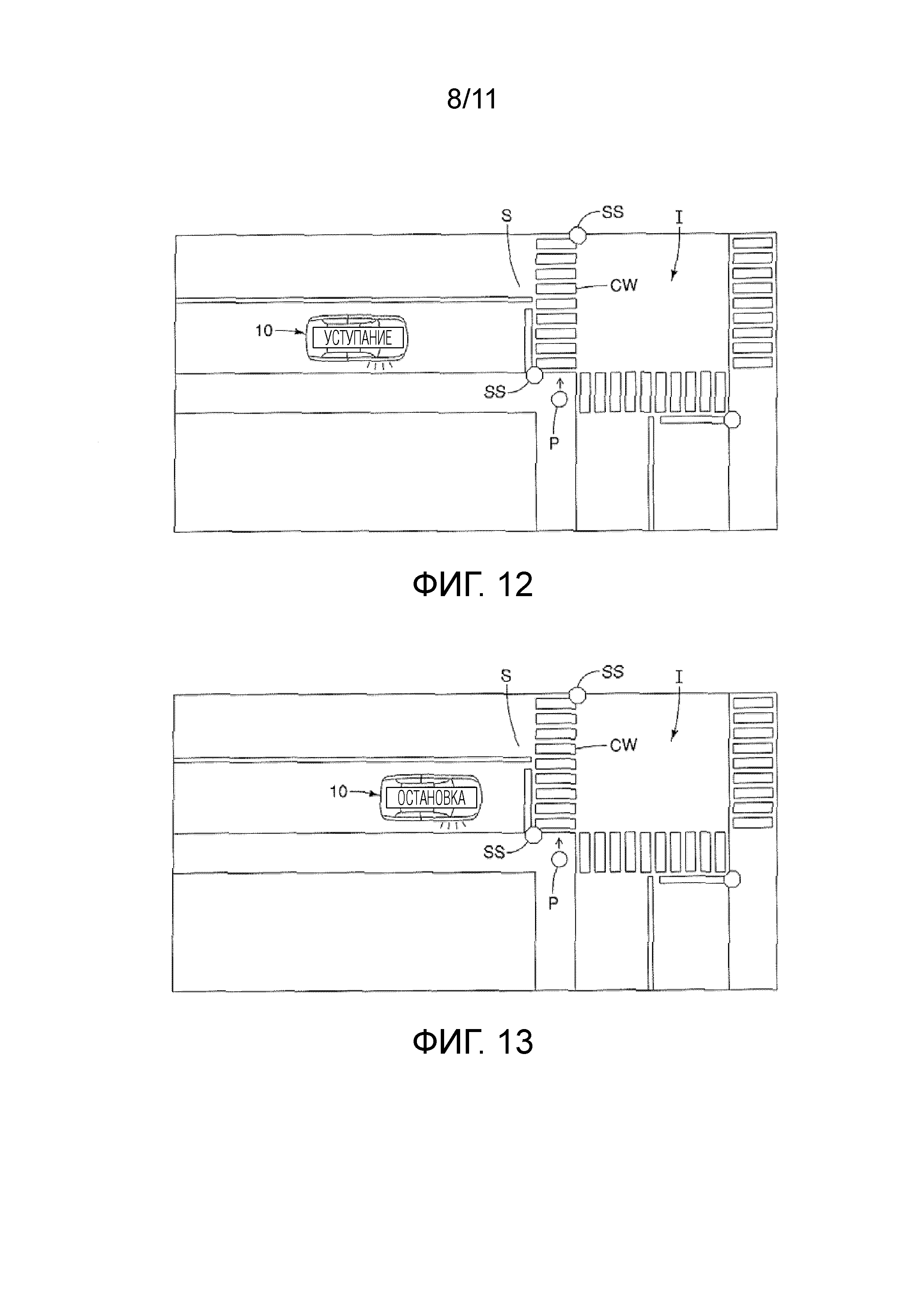
Фиг. 12 представляет собой схематический вид в плане транспортного средства, оборудованного системой индикации состояния транспортного средства в соответствии с одним вариантом осуществления, приближающегося к перекрестку, замедляющегося и уступающего дорогу пешеходу, ожидающему на пешеходном переходе.
Фиг. 13 представляет собой схематический вид в плане транспортного средства, оборудованного системой индикации состояния транспортного средства в соответствии с одним вариантом осуществления, приближающегося к перекрестку и останавливающегося, позволяя пешеходу, ожидающему на пешеходном переходе, перейти дорогу.
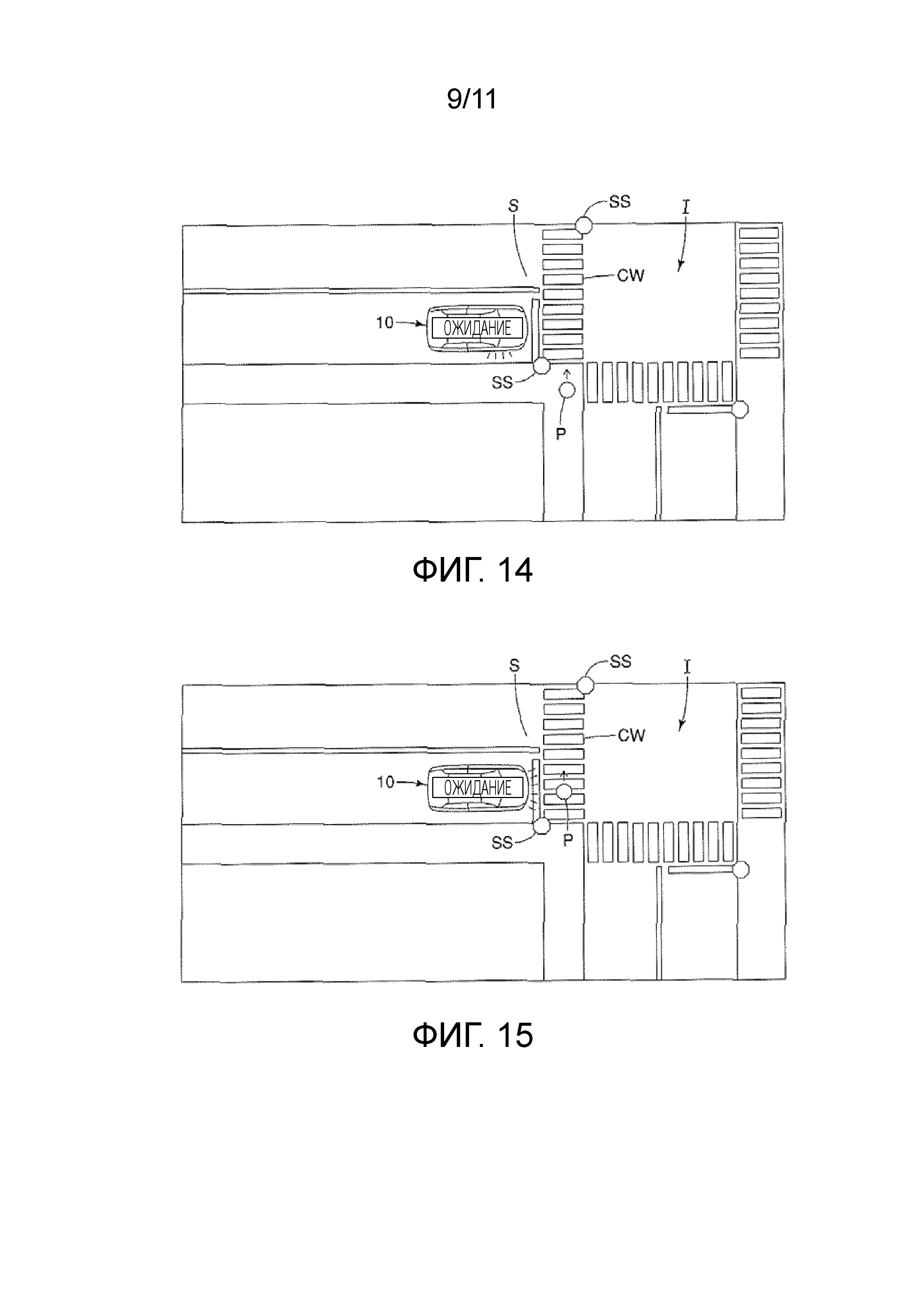
Фиг. 14 представляет собой схематический вид в плане транспортного средства, оборудованного системой индикации состояния транспортного средства в соответствии с одним вариантом осуществления, остановившегося на перекрестке и ожидающего, пока пешеход перейдет дорогу.
Фиг. 15 представляет собой схематический вид в плане транспортного средства, оборудованного системой индикации состояния транспортного средства в соответствии с одним вариантом осуществления, остановившегося на перекрестке и ожидающего, пока пешеход завершит переход дороги.
Фиг. 16 представляет собой схематический вид в плане транспортного средства, оборудованного системой индикации состояния транспортного средства в соответствии с одним вариантом осуществления, остановившегося на перекрестке и обнаруживающего, что пешеход завершил переход дороги.
Фиг. 17 представляет собой схематический вид в плане транспортного средства, оборудованного системой индикации состояния транспортного средства в соответствии с одним вариантом осуществления, остановившегося на перекрестке, обнаруживающего, что пешеход завершил переход дороги, и указывающего, что транспортное средство скоро начнет движение вперед.
Фиг. 18 представляет собой схематический вид в плане транспортного средства, оборудованного системой индикации состояния транспортного средства в соответствии с одним вариантом осуществления, движущегося вперед через перекресток.
ВАРИАНТ (ВАРИАНТЫ) ВЫПОЛНЕНИЯ ИЗОБРЕТЕНИЯ
[0009] Выбранные варианты осуществления будут рассмотрены далее со ссылкой на чертежи. Специалисту в области техники из настоящего изобретения будет понятно, что следующие далее описания вариантов осуществления обеспечены только в целях иллюстрации, а не ограничения изобретения, которое определено приложенной формулой изобретения и ее эквивалентами.
[0010] Сначала обратимся к Фиг. 1, на которой проиллюстрировано транспортное средство 10, оборудованное системой 12 индикации состояния транспортного средства в соответствии с первым вариантом осуществления. Транспортное средство 10 предпочтительно представляет собой автономное транспортное средство, но может быть любым подходящим транспортным средством. Система 12 индикации состояния транспортного средства имеет множество режимов (или работает во множестве режимов), которые указывают состояние транспортного средства внешним объектам P (например, пешеходам и удаленным транспортным средствам).
[0011] Как показано на Фиг. 1 и 2, система 12 индикации состояния транспортного средства включает в себя контроллер 14, звуковой генератор 16, систему 18 отображения, систему 20 обнаружения и систему 22 световой индикации (или световой индикатор). Дополнительно, система 12 индикации состояния транспортного средства находится в сообщении с системой 24 определения местоположения транспортного средства.
[0012] Контроллер 14 предпочтительно включает в себя микрокомпьютер с программой управления, которая управляет системой 12 индикации состояния транспортного средства, как рассмотрено ниже. Контроллер 14 также может включать в себя другие традиционные компоненты, например, схему интерфейса ввода, схему интерфейса вывода и запоминающие устройства, например, ROM (постоянное запоминающее устройство) и RAM (оперативное запоминающее устройство). Микрокомпьютер контроллера 14 запрограммирован с возможностью управления одним или более из звукового генератора 16, системы 18 отображения, системы 20 обнаружения и системы 22 световой индикации и с возможностью выполнения определений или принятия решений, как рассмотрено в настоящем документе. Схема памяти хранит результаты обработки и программы управления, например, для звукового генератора 16, системы 18 отображения, системы 20 обнаружения и системы 22 световой индикации, которые запускаются схемой процессора. Контроллер 14 функционально связан с звуковым генератором 16, системой 18 отображения, системой 20 обнаружения и системой 22 световой индикации традиционным образом, а также с другими электрическими системами в транспортном средстве, например, с указателями поворота, стеклоочистителями ветрового стекла, световыми приборами, любой системой или устройством, необходимым или желательным для работы транспортного средства (автономной или иной), и любыми другими подходящими системами. Такое соединение позволяет контроллеру 14 отслеживать и управлять любой из этих систем при необходимости. Внутреннее RAM контроллера 14 хранит состояния рабочих флажков и различные данные управления. Внутреннее ROM контроллера 14 хранит информацию для различных операций. Контроллер 14 выполнен с возможностью выборочного управления любым из компонентов системы 12 индикации состояния транспортного средства в соответствии с программой управления. Специалисту в области техники из настоящего изобретения будет понятно, что точная структура и алгоритмы для контроллера 14 могут представлять собой любое сочетание аппаратного обеспечения и программного обеспечения, которое будет выполнять функции настоящего изобретения.
[0013] В одном варианте осуществления система 12 индикации состояния транспортного средства может включать в себя систему 20 обнаружения. Предпочтительно, система обнаружения включает в себя множество датчиков 26, 28, 30 и 32 транспортного средства, которые выполнены с возможностью обнаружения удаленного объекта вблизи транспортного средства. Например, как проиллюстрировано на Фиг. 1, датчики 26, 28, 30 и 32 транспортного средства предпочтительно установлены снаружи на передних крыльях 34a и 34b и задних крыльях 36a и 36b транспортного средства 10. Однако датчики 26, 28, 30 и 32 могут быть установлены на любом подходящем внешнем участке транспортного средства 10, в том числе на переднем и заднем бамперах, внешних зеркалах или любом сочетании подходящих областей. Датчики 26, 28, 30 и 32 передают данные в систему 24 позиционирования, которая может с использованием данных датчиков вычислять местоположение транспортного средства 10.
[0014] Датчики 26, 28, 30 и 32 транспортного средства могут представлять собой датчики любого желаемого типа. Например, передние датчики могут включать в себя радиолокационное устройство дальнего действия для обнаружения объектов перед основным транспортным средством. Передний датчик может быть выполнен с возможностью обнаружения объектов на заданном расстоянии (например, на расстояниях до 200 м) и, следовательно, может иметь малый угол обзора (например, около 15°). Из-за малого угла обзора радиолокационное устройство дальнего действия не может обнаруживать все объекты перед основным транспортным средством. Таким образом, при необходимости передние угловые датчики могут включать в себя радиолокационные устройства ближнего действия для помощи в отслеживании области перед основным транспортным средством. Задние датчики могут включать в себя радиолокационные устройства ближнего действия для помощи в отслеживании встречного дорожного движения сбоку и сзади основного транспортного средства. Размещение вышеуказанных датчиков позволяет отслеживать дорожный поток, включая удаленные транспортные средства и другие объекты вокруг основного транспортного средства, и положение транспортного средства 10 относительно положения удержания полосы движения или выезда за пределы полосы движения. Однако датчики 26, 28, 30 и 32 могут быть расположены в любом месте транспортного средства 10 и могут включать в себя любой тип и/или сочетание датчиков, позволяющих обнаружение удаленных объектов. В дополнение датчики могут представлять собой камеры, радиолокационные датчики, фотодатчики или любое их сочетание. Хотя Фиг. 1 иллюстрирует четыре датчика 26 28, 30 и 32, может быть обеспечено столько датчиков, сколько необходимо или желательно.
[0015] Хотя датчики 26, 28, 30 и 32 предпочтительно представляют собой электронные устройства обнаружения, которые передают электромагнитные волны (например, радиолокационный датчик), эти датчики могут быть любыми подходящими датчиками, которые, например, принимают обработанные компьютером изображения с использованием цифровой камеры и анализируют изображения или испускают лазерные лучи, как известно в уровне техники. Датчики могут быть выполнены с возможностью определения по меньшей мере скорости, направления, рыскания, ускорения и расстояния от транспортного средства 10 до удаленного объекта. Кроме того, датчики 26, 28, 30 и 32 могут включать в себя устройства определения местоположения объектов, включая датчики дальности, например, радары FM-CW (непрерывного излучения с частотной модуляцией), импульсные радары и радары FSK (с частотной манипуляцией), сонарные и лидарные (световое обнаружение и определение дальности) устройства и ультразвуковые устройства, которые основаны на таких эффектах, как эффект Доплера для определения местоположения объектов впереди. Устройства определения местоположения могут включать в себя устройства с зарядовой связью (CCD) или видеодатчики на основе комплементарного металл-оксидного проводника (CMOS) и другие известные процессоры фото/видеоизображений, которые используют способы цифровой фотосъемки для «просмотра» объектов впереди, включая одно или более удаленных транспортных средств. Датчики 14 находятся в сообщении с контроллером через систему 24 позиционирования и выполнены с возможностью передачи информации в контроллер 14.
[0016] Как проиллюстрировано на Фиг. 1-8, система 12 индикации состояния транспортного средства включает в себя систему 22 световой индикации. Система 22 световой индикации может включать в себя световое устройство 38 по меньшей мере на передней части 42 транспортного средства 10 и световую полосу 40, продолжающуюся вокруг транспортного средства 10. Такое размещение светового устройства 38 позволяет транспортному средству 10 четко указывать намерение внешним объектам P перед транспортным средством 10 (например, пешеходам или удаленным транспортным средствам, к которым приближается транспортное средство 10). Однако отметим, что световое устройство 38 может быть расположено в любой желаемой или подходящей области транспортного средства 10.
[0017] Световое устройство 38 выполнено с возможностью излучения множества цветов во множестве положений. То есть световое устройство 38 может отображать множество режимов, которые указывают состояние транспортного средства 10. Например, в одном режиме система 22 световой индикации может отображать красный свет, указывающий, что транспортное средство 10 находится в состоянии движения вперед, и, следовательно, пересечение дороги перед транспортным средством 10 не рекомендуется. В другом режиме система 22 световой индикации может отображать желтый свет, указывающий, что транспортное средство 10 находится в переходном состоянии (т.е. в более пассивном состоянии относительно состояния движения вперед). Такая индикация может происходить, когда транспортное средство 10 замедляется или уступает дорогу пешеходам или другим транспортным средствам. Система 22 световой индикации может отображать зеленый свет, указывающий, что транспортное средство 10 находится в состоянии остановки, и, следовательно, пересечение дороги перед транспортным средством 10 разрешено. В одном варианте осуществления система 22 световой индикации выполнена с возможностью отображения пяти отдельных и различных цветов, причем каждый цвет представляет отдельный режим транспортного средства 10. То есть в дополнение к трем цветам, рассмотренным выше (красный, желтый и зеленый), система 22 световой индикации также может отображать зелено-желтый цвет, указывающий частично пассивное состояние или состояние уступания, и оранжевый цвет для индикации более активного состояния, чем желтый цвет, но не такого активного, как красный цвет. Кроме того, цвета света могут представлять собой непрерывный спектр, который динамически изменяется между состояниями. С другой стороны, система 22 световой индикации может просто отображать различные цвета для индикации состояния транспортного средства 10. Цвета, рассмотренные в настоящем документе, использованы только в качестве примера, и цвета, указывающие состояние транспортного средства, могут представлять собой любые подходящие или желаемые цвета. То есть в приведенном выше примере зеленый цвет указывает состояние ожидания, тем самым указывая, что пересечение дороги перед транспортным средством 10 разрешено. Однако зеленый цвет может указывать состояние движения вперед, и, следовательно, пересечение дороги не рекомендуется.
[0018] Таким образом, система 22 индикации состояния имеет множество режимов (или работает во множестве режимов), которые указывают состояние транспортного средства 10 внешним объектам P (например, пешеходам и удаленным транспортным средствам). Множество режимов представляют собой режимы, в которых система 22 световой индикации «включена», т.е. световое устройство горит, или дисплей отображает текст. Каждый из множества режимов может отличаться от другого режима.
[0019] Как показано на Фиг. 4-8, световая полоса 40 может иметь подсвечиваемые участки 40a, 40b и 40c. Таким образом, при обнаружении внешнего объекта P, например, пешехода или удаленного транспортного средства, системой 20 обнаружения, световая полоса 40 может указывать направление внешнего объекта P. Световая полоса 40 в общем соединена с боковыми сторонами 38a и 38b светового устройства 38 на передней части транспортного средства 10 и продолжается вокруг (т.е. окружает) или по существу вокруг транспортного средства 10.
[0020] Таким образом, как показано на Фиг. 4-6, при обнаружении внешнего объекта P световая полоса 40 указывает участок (например, участок 40a) световой полосы 40 в направлении или рядом с внешним объектом P. Дополнительно, как показано на Фиг. 7 и 8, при обнаружении нескольких (или множества) внешних объектов каждый объект может быть указан отдельно (участки 40a и 40b), или при формировании большой группы рядом с транспортным средством 10 световая полоса 40 может указывать большой участок 40c в направлении группы.
[0021] Кроме того, световая полоса 40 может указывать состояние транспортного средства 10 с использованием разных режимов. Таким образом, в одном варианте осуществления, подобно световому устройству 38, световая полоса 40 может отображать множество режимов, которые указывают состояние транспортного средства 10. Например, в одном режиме световая полоса 40 может отображать красный свет, указывающий, что транспортное средство 10 находится в состоянии движения вперед, и, следовательно, пересечение дороги перед транспортным средством 10 не рекомендуется. В другом режиме световая полоса 40 может отображать желтый свет, указывающий, что транспортное средство 10 находится в переходном состоянии (т.е. в более пассивном состоянии относительно состояния движения вперед). Такая индикация может происходить, когда транспортное средство 10 замедляется или уступает дорогу пешеходам или другим транспортным средствам. Световая полоса 40 может отображать зеленый свет, указывающий, что транспортное средство 10 находится в состоянии остановки, и, следовательно, пересечение дороги перед транспортным средством 10 разрешено. В одном варианте осуществления световая полоса 40 может отображать пять отдельных и различных цветов, причем каждый цвет представляет отдельный режим транспортного средства 10. То есть в дополнение к трем цветам, рассмотренным выше (красный, желтый и зеленый), световая полоса 40 также может отображать зелено-желтый цвет, указывающий частично пассивное состояние или состояние уступания, и оранжевый цвет для индикации более активного состояния, чем желтый цвет, но не такого активного, как красный цвет. Кроме того, цвета света могут представлять собой непрерывный спектр, который динамически изменяется между состояниями. Цвета, рассмотренные в настоящем документе, использованы только в качестве примера, и цвета, указывающие состояние транспортного средства, могут представлять собой любые подходящие или желаемые цвета. То есть в приведенном выше примере зеленый цвет указывает состояние ожидания, тем самым указывая, что пересечение дороги перед транспортным средством 10 разрешено. Однако, зеленый цвет может указывать состояние движения вперед, и, следовательно, пересечение дороги не рекомендуется.
[0022] Индикация состояния транспортного средства не ограничивается цветами. То есть индикация текущего состояния транспортного средства 10 может отображаться любым подходящим образом, включая, но не ограничиваясь, один цветовой спектр, измерительную систему, индикатор яркости, числовой индикатор, звук или любой другой способ.
[0023] В одном варианте осуществления водитель или пользователь транспортного средства 10 может изменять смещение состояния взаимодействия. То есть водитель или пользователь транспортного средства 10 может регулировать настройку транспортного средства 10, которая побуждает транспортное средство 10 чаще предоставлять приоритет или чаще принимать приоритет, по желанию. Например, водитель или пользователь транспортного средства 10 может настраивать систему 12 индикации состояния транспортного средства на пассивное смещение, которые может быть связано со спокойным вождением и дружелюбным поведением, т.е. транспортное средство 10 будет чаще останавливаться и медленно и плавно ускоряться/тормозить. С другой стороны, водитель или пользователь транспортного средства 10 может настраивать систему 12 индикации состояния транспортного средства на активное смещение, которое может быть связано с быстрым вождением и независимым поведением, т.е. транспортное средство 10 быстрее добирается из пункта A в пункт B и резче ускоряется/тормозит. Такие настройки могут представлять собой непрерывный спектр между пассивным смещением и активным смещением или иметь множество настроек, включая, но не ограничиваясь, пассивное смещение и активное смещение.
[0024] Дополнительно, система 12 индикации состояния транспортного средства включает в себя дисплей 18. Дисплей 18 предпочтительно представляет собой текстовый дисплей, который расположен на транспортном средстве 10 (например, на приборной панели 44) с возможностью выборочной индикации снаружи транспортного средства первого состояния транспортного средства 10 и второго состояния транспортного средства 10 в направлении вперед транспортного средства 10. Таким образом, в одном варианте осуществления подобно световому устройству 38, дисплей 18 может отображать в текстовом формате множество режимов, которые указывают состояние транспортного средства 10. Например, в одном режиме, как показано на Фиг. 3, дисплей 18 может отображать текст «ДВИЖЕНИЕ ВПЕРЕД», указывающий, что транспортное средство 10 находится в состоянии движения вперед, и, следовательно, пересечение дороги перед транспортным средством 10 не рекомендуется. В другом режиме, как показано на Фиг. 4, дисплей 18 может отображать текст «УСТУПАНИЕ», указывающий, что транспортное средство 10 находится в переходном состоянии (т.е. в более пассивном состоянии относительно состояния движения вперед). Такая индикация может происходить, когда транспортное средство 10 замедляется или уступает дорогу пешеходам или другим транспортным средствам. Как показано на Фиг. 5, дисплей 18 может отображать текст «ОСТАНОВКА», указывающий, что транспортное средство 10 находится в состоянии остановки, и, следовательно, пересечение дороги перед транспортным средством 10 разрешено. Как показано на Фиг. 6-8, дисплей 18 может отображать текст «ОЖИДАНИЕ», указывающий, что транспортное средство 10 находится в состоянии ожидания, и, следовательно, пересечение дороги перед транспортным средством 10 разрешено.
[0025] Как показано на Фиг. 1 и 2, система 12 индикации состояния транспортного средства предпочтительно включает в себя звуковой генератор 16 (например, динамик или множество динамиков). Звуковой генератор 16 может находиться в любом подходящем месте в транспортном средстве 10 или может быть установлен снаружи на транспортном средстве. Например, звуковой генератор 16 может быть установлен на внутренней стороне дверей или стенках транспортного средства 10 или может быть установлен на приборной панели 44 или приборной доске и выполнен так, что он будет воспроизводить звук после приема сигнала от контроллера 14. Звуковой генератор 16 может выводить звук из динамиков, используемых для других применений (например, радио) или из специализированного динамика. Звуковой генератор 16 может работать с системой 22 световой индикации и дисплеем 18 для обеспечения информации о состоянии транспортного средства водителю и пассажирам транспортного средства 10 и внешним объектам P. То есть звуковой генератор 16 может воспроизводить звук, указывающий, что транспортное средство 10 ожидает, пока внешний объект P пересечет дорогу перед транспортным средством 10, или что транспортное средство 10 готовится к движению вперед или движется вперед. Звуковой генератор 16 выполнен с возможностью формирования первого звука, когда световой индикатор 22 указывает первый режим, и выполнен с возможностью формирования второго звука, отличного от первого звука, когда световой индикатор 22 указывает второй режим.
[0026] В другом варианте осуществления звуковой генератор 16 может обеспечивать предупредительную обратную связь с внешним объектом P для указания, что транспортное средство 10 осведомлено о внешнем объекте, пересекающем дорогу перед транспортным средством 10.
[0027] Кроме того, как проиллюстрировано на Фиг. 1 и 2, транспортное средство 10 включает в себя систему 24 определения местоположения транспортного средства, например, GPS, которая находится в сообщении с системой 12 индикации состояния транспортного средства. В одном варианте осуществления транспортное средство 10 принимает спутниковый сигнал GPS. Понятно, что GPS обрабатывает спутниковый сигнал GPS для определения информации о положении (например, местоположения, скорости, ускорения, рыскания и направления, в качестве нескольких примеров) транспортного средства 10. Как отмечено в настоящем документе, система позиционирования находится в сообщении с контроллером 14 и выполнена с возможность передачи такой информации о положении транспортного средства 10 в контроллер 14.
[0028] Система 24 определения местоположения транспортного средства также может включать в себя запоминающее устройство, которое хранит картографические данные. Таким образом, при определении положения транспортного средства 10 с использованием любого из описанных в настоящем документе способов, устройств или систем, положение транспортного средства 10 может сравниваться с известными данными, сохраненными в запоминающем устройстве. Таким образом, в одном варианте осуществления система определения местоположения может определять, что транспортное средство находится вблизи пешеходного перехода CW, знака «STOP» SS, перекрестка I или любой другой области, в которой удаленное транспортное средство или пешеход (т.е. внешний объект P) могут пересекать дорогу вблизи или перед транспортным средством 10. Например, система определения местоположения может определять, что транспортное средство находится вблизи пешехода, который пересекает улицу в области, отличной от пешеходного перехода (т.е. переходит дорогу в неположенном месте), и система 12 индикации состояния транспортного средства может сообщать намерение, как описано выше. Также система определения местоположения может обнаруживать сигнальные устройства и конструкции, отличные от знаков «STOP», например, стоп-сигналы (например, сценарии, включающие правомерный поворот направо на красный свет), и система 12 индикации состояния транспортного средства может сообщать намерение соответствующим образом. Удаленное транспортное средство может представлять собой любой тип транспортного средства на дороге, включая, но не ограничиваясь, легковые автомобили, грузовые автомобили, велосипеды и любые другие транспортные средства.
[0029] Фиг. 9A и 9B иллюстрируют процедуру, в которой система 12 индикации состояния транспортного средства определяет состояние транспортного средства 10 и способ связи с внешним объектом P, например, пешеходом или удаленным транспортным средством. Первоначально на этапе S1 транспортное средство находится в состоянии движения вперед. Таким образом, световое устройство 38 отображает красный свет, а дисплей 18 отображает текст «ДВИЖЕНИЕ ВПЕРЕД». Затем на этапе S2 система обнаружения обнаруживает внешний объект P (например, пешехода или удаленное транспортное средство). На этапе S3 система 24 определения местоположения транспортного средства определяет, приближается ли транспортное средство к пешеходному переходу CW, знаку «STOP» SS или другой области, в которой необходимо уступать дорогу внешнему объекту P. Если нет ни одного из этих условий, система 12 индикации состояния транспортного средства сохраняет все индикации того, что транспортное средство 10 находится в состоянии движения вперед.
[0030] Если система 12 индикации состояния транспортного средства определяет, что транспортное средство 10 приближается к пешеходному переходу CW или знаку «STOP» SS, например, контроллер 14 определяет, что необходимо уступить дорогу. Таким образом, на этапе S4 контроллер 14 побуждает транспортное средство 10 к снижению скорости и индикации посредством светового устройства 38 и дисплея 18, что транспортное средство 10 находится в состоянии уступания. Кроме того, световая полоса 40 указывает направление обнаруженного внешнего объекта P. На этапе S5 пока транспортное средство 10 продолжает уступать дорогу, транспортное средство 10 дополнительно снижает скорость до нуля и указывает, что транспортное средство 10 находится в состоянии остановки, посредством светового устройства 38 и дисплея 18 и указывает направление внешнего объекта P посредством световой полосы 40. Таким образом, система 12 индикации состояния транспортного средства с помощью системы 22 световой индикации выполнена с возможностью переключения светового устройства 38 из одного режима в другой режим при обнаружении системой 20 обнаружения внешнего движущегося объекта P.
[0031] На этапе S6 транспортное средство 10 останавливается и указывает, что транспортное средство 10 находится в состоянии ожидания, посредством системы 22 световой индикации и дисплея 18 и указывает направление внешнего объекта P. На этапе S7 контроллер 14 определяет, пересек ли внешний объект P перекресток I или пешеходный переход CW. Если внешний объект P не пересек перекресток I или пешеходный переход CW, на этапе S8 контроллер 14 определяет, ожидает ли транспортное средство 10 заданное количество времени, пока внешний объект P выполнит пересечение дороги. Если транспортное средство 10 не ожидает заданное количество времени, транспортное средство 10 продолжает этап ожидания, описанный на этапе S6. Однако, если транспортное средство 10 ожидает заданное количество времени, или если внешний объект P пересек перекресток I или пешеходный переход CW, на этапе S9 световое устройство 38 и дисплей 18 указывают, что транспортное средство 10 скоро начнет движение вперед. На этапе S10 транспортное средство 10 начинает движение вперед и указывает состояние движения вперед посредством светового устройства 38 и дисплея 18.
[0032] Обратимся к Фиг. 10-17, не которых показано транспортное средство 10, оборудованное системой 12 индикации состояния транспортного средства. Сначала на Фиг. 10 показано транспортное средство 10, приближающееся к перекрестку I, который включает в себя знак «STOP» SS и пешеходный переход для пешеходов. При приближении транспортного средства 10 к перекрестку I транспортное средство 10 указывает, что оно находится в состоянии движения вперед. На Фиг. 11 система 20 обнаружения обнаруживает пешехода (т.е. внешний объект P), ожидающего на пешеходном переходе CW. Дополнительно, транспортное средство 10 может определять наличие знака «STOP» SS посредством системы 20 обнаружения и/или системы 24 определения местоположения транспортного средства. Затем на Фиг. 12 система 12 индикации состояния транспортного средства указывает местоположение пешехода (т.е. внешнего объекта P) относительно транспортного средства 10 посредством световой полосы 40 и указывает, что транспортное средство 10 переходит в состояние уступания, посредством системы 22 световой индикации и дисплея 18.
[0033] Как показано на Фиг. 13, при приближении транспортного средства 10 к пешеходному переходу CW транспортное средство 10 останавливается и указывает, что транспортное средство 10 находится в состоянии остановки, посредством системы 22 световой индикации и дисплея 18. Как показано на Фиг. 14, транспортное средство 10 завершает остановку и указывает, что транспортное средство 10 находится в состоянии ожидания, посредством системы 22 световой индикации и дисплея 18. Как показано на Фиг. 15, система 20 обнаружения отслеживает пешехода (т.е. внешний объект P) при пересечении пешеходом улицы S перед транспортным средством 10. На Фиг. 16 пешеход (т.е. внешний объект P) завершил переход, световая полоса 40 указывает направление пешехода, и на Фиг. 17 система 12 индикации состояния транспортного средства указывает, что транспортное средство 10 скоро начнет движение вперед посредством системы 22 световой индикации и дисплея 18.
[0034] На Фиг. 18 система 12 индикации состояния транспортного средства указывает, что транспортное средство 10 движется вперед через перекресток I. В одном варианте осуществления, если пешеход (т.е. внешний объект P) не пересекает перекресток I через пешеходный переход CW или любым другим образом, система 20 обнаружения может обнаруживать неизменное положение пешехода (т.е. внешнего объекта P). На основе отсутствия движения пешехода (т.е. внешнего объекта P) контроллер 14 может сделать вывод, что пешеход не намерен переходить дорогу. В такой ситуации контроллер 14 может изменять состояние транспортного средства на состояние предстоящего движения вперед, описанное выше (Фиг. 17), и побуждать транспортное средство 10 к движению вперед, как описано в отношении Фиг. 18. Другими словами, система 22 световой индикации выполнена с возможностью перехода из одного режима (т.е. режима ожидания) в другой режим (т.е. режим движения вперед или режим предстоящего движения вперед) после заданного количества времени. Таким образом, система 12 индикации состояния транспортного средства с использованием системы 20 обнаружения выполнена с возможностью определения состояния движения внешнего объекта P, и контроллер 14 запрограммирован с возможностью определения, намерено ли транспортное средство 10 перейти в первое состояние или второе состояние, на основе состояния движения внешнего движущегося объекта P. Кроме того, система 20 обнаружения может быть выполнена с возможностью обнаружения сигналов рукой или других индикаторов от внешнего объекта P. То есть система 20 обнаружения выполнена с возможностью обнаружения жеста пешехода, и контроллер 14 запрограммирован с возможностью побуждения внешнего ответа в ответ на жест, обнаруженный системой 20 обнаружения. Например, внешний объект P, в случае пешехода, может махнуть транспортному средству 10 рукой вперед для указания, что пешеход намерен подождать, пока транспортное средство 10 пересечет перекресток. В случае удаленного транспортного средства транспортное средство может мигать фарами или выполнять другое действие для указания, что удаленное транспортное средство намерено подождать, пока транспортное средство 10 пересечет перекресток. На основе индикации от внешнего объекта P контроллер 14 может делать вывод, что он может продолжить движение. В такой ситуации контроллер 14 может изменять состояние транспортного средства 10 на состояние предстоящего движения вперед, описанное выше (Фиг. 17), и побуждать транспортное средство 10 к движению вперед, как описано в отношении Фиг. 18.
[0035] Кроме того, внешний объект P может указывать транспортному средству 10 признательность за ожидание. В такой ситуации система 20 обнаружения может обнаруживать индикацию внешнего объекта P, и система 12 индикации состояния транспортного средства может отображать признательность в текстовом формате посредством дисплея 18 или воспроизводить признательность в звуковом формате через звуковой генератор 16.
[0036] Транспортное средство 10 также может указывать недовольство внешним объектом P. Например, в ситуации, когда внешний объект P резко изменяет направление или действия, так что внешний объект P исключает намеченную возможность перемещения или направление перемещения транспортного средства 10, система 12 индикации состояния транспортного средства может указывать недовольство с использованием текста на дисплее 18, системы 22 световой индикации или воспроизведения неприятного звука (например, клаксона или визга шин) через звуковой генератор 16.
[0037] Система 12 индикации состояния транспортного средства, описанная в настоящем документе, повышает понятность и предсказуемость транспортных средств, в частности, автономных транспортных средств. Кроме того, эта система сообщает снаружи транспортного средства состояние транспортного средства 10 всем возможным взаимодействующим агентам. Кроме того, эта система способствует гибкости во взаимодействиях на основе входных данных от системы восприятия или обнаружения транспортного средства, истории взаимодействия транспортных средств и систем связи между транспортными средствами. Контроллер 14 может быть запрограммирован с возможностью перехода из первого режима во второй режим на основе заданного события, и контроллер 14 выполнен с возможностью ручной настройки для изменения заданного события.
[0038] Система определения местоположения транспортного средства представляет собой традиционный компонент, который хорошо известен в уровне техники. Поскольку системы определения местоположения транспортного средства хорошо известны в уровне техники, их структуры не будут подробно рассматриваться или иллюстрироваться в настоящем документе. Наоборот, специалисту в области техники из настоящего изобретения будет понятно, что компоненты могут иметь любой тип структуры и/или программирования, которые могут быть использованы для осуществления настоящего изобретения.
Общая интерпретация выражений
[0039] В понимании объема охраны настоящего изобретения выражение «содержащий» и его производные в данном контексте приведены в качестве неограничивающих выражений, которые указывают наличие изложенных признаков, элементов, компонентов, групп, целых чисел и/или этапов, но не исключают наличия других неизложенных признаков, элементов, компонентов, групп, целых чисел и/или этапов. Вышесказанное также относится к словам, имеющим подобные значения, например, к выражениям «включающий», «имеющий» и их производным. Также выражения «часть», «секция», «участок» или «элемент» при использовании в единственном числе могут иметь двойное значение одной части или множества частей. Также при использовании в настоящем документе для описания вышеприведенных вариантов осуществления следующие выражения направления «вперед», «назад» и «выше», а также любые другие подобные выражения направления относятся к направлениям транспортного средства, оборудованного системой индикации состояния транспортного средства. Соответственно, эти выражения при использовании для описания настоящего изобретения следует интерпретировать относительно транспортного средства, оборудованного системой индикации состояния транспортного средства.
[0040] Выражение «обнаруживать», используемое в настоящем документе для описания операции или функции, выполняемой компонентом, секцией, устройством или т.п., включает в себя компонент, секцию, устройство или т.п., которое не требует физического обнаружения, а включает в себя определение, измерение, моделирование, прогнозирование или вычисление или т.п. для выполнения операции или функции.
[0041] Выражение «выполненный с возможностью», используемое в настоящем документе для описания компонента, секции или части устройства, включает в себя аппаратное обеспечение и/или программное обеспечение, которое выполнено и/или запрограммировано с возможностью выполнения требуемой функции.
[0042] Выражения степени, например, «по существу», в данном контексте означают разумную величину отклонения модифицированного выражения такую, что конечный результат существенно не изменяется.
[0043] Хотя только некоторые варианты осуществления выбраны для иллюстрации настоящего изобретения, специалисту в области техники из настоящего раскрытия будет понятно, что различные изменения и модификации могут быть выполнены в настоящем документе без отклонения от объема охраны изобретения, который определен в приложенной формуле изобретения. Например, размер, форма, местоположение или ориентация различных компонентов могут быть изменены при желании и/или необходимости. Компоненты, которые показаны непосредственно соединенными или контактирующими друг с другом, могут иметь промежуточные конструкции, расположенные между ними. Функции одного элемента могут выполняться двумя элементами, и наоборот. Конструкции и функции одного варианта осуществления могут быть применены в другом варианте осуществления. Не обязательно, чтобы все преимущества одновременно присутствовали в конкретном варианте осуществления. Каждый признак, который является уникальным на основе известного уровня техники, один или в сочетании с другими признаками, также следует рассматривать как отдельное описание дополнительных изобретений заявителем, включая структурные и/или функциональные концепции, воплощаемые такими признаками. Таким образом, вышеприведенное описание вариантов осуществления в соответствии с настоящим изобретением обеспечено только в целях иллюстрации, а не ограничения изобретения, которое определено приложенной формулой изобретения и ее эквивалентами.
Перечень позиционных обозначений
[0044]
10 Транспортное средство
12 Система индикации состояния транспортного средства
14 Контроллер
16 Звуковой генератор
18 Система отображения
20 Система обнаружения
22 Система световой индикации
24 Система определения местоположения транспортного средства
Реферат
Изобретение относится к области машиностроения, в частности к системам индикации состояния транспортного средства. Система содержит систему обнаружения, световой индикатор. Система обнаружения выполнена с возможностью обнаружения внешнего движущегося объекта. Световой индикатор продолжается вокруг транспортного средства и указывает направление внешнего объекта при обнаружении внешнего объекта системой обнаружения. Достигается повышение предсказуемости действий пользователя транспортного средства. 27 з.п. ф-лы, 18 ил.
Комментарии