Устройство для выравнивания изделия, в частности полуфабриката керамического изделия - RU2458789C2
Код документа: RU2458789C2
Чертежи






Описание
Настоящее изобретение относится предпочтительно к технологии изготовления керамики для производства керамических изделий путем отливания водной суспензии содержащего глину сырья (известного как «шликер») в пористые литейные формы для получения полуфабрикатов санитарно-технических изделий, таких как умывальники, биде и подобные предметы.
Изобретение относится, в частности, к устройству для окончательной обработки этих изделий путем выравнивания их поверхностей в течение процесса изготовления, в то время пока они все еще находятся в «состояниях», которые позволяют использовать на них абразивные устройства с помощью жидкостей для облегчения их способности к механической обработке, то есть когда они находятся в «сыром» состоянии и в состоянии «жесткой кожи».
Данное описание изобретения относится к этой конкретной технологии. Тем не менее следует понимать, что описание выполнено исключительно с целью не ограничивающего примера, так как характеристики изобретения таковы, что возможны его дальнейшие полезные применения в областях, отличных от описываемой области.
Выравнивание поверхностей полуфабрикатов керамических изделий, получаемых отливанием шликера, предпочтительно выполняется, когда изделия находятся в «сыром» состоянии (то есть твердые, но все еще имеющие содержание воды между 17% и 20% по весу и поэтому все еще подверженные пластической деформации) или в состоянии «жесткой кожи» (с содержанием воды обычно менее чем 13%, когда изделие, хотя и является жестким, все еще может обрабатываться влажным выравнивающим инструментом). Однако при некоторых условиях выравнивание также может быть выполнено, когда изделие уже находится в «сухом» состоянии, то есть имеет содержание воды обычно ниже 2%.
Устройство предшествующего уровня техники, описанное в документе EP 640450, содержит инструмент для окончательной обработки, который может автоматически восстанавливаться непрерывно во время работы.
Инструмент содержит бесконечный абразивный ремень с механическим приводом, направляемый вокруг трех шкивов, расположенных в пространстве таким образом, чтобы стягивать ремень к форме замкнутой трехсторонней фигуры, содержащий активный участок, пассивный участок и передаточный участок.
Пассивный участок соединен с резервуаром, содержащим жидкость, через которую движется пассивный участок и в которую остается постоянно погруженным.
Выравниваемый полуфабрикат изделия, удерживаемый управляемым роботом механическим манипулятором, ориентируется подходящим образом в пространстве и приводится в соприкосновение с активным участком ремня, который скользит по касательной над поверхностью полуфабриката изделия для удаления заусенцев и других неравномерностей поверхности.
Удаляемые частицы керамического материала задерживаются в структуре материала активного участка абразивного ремня и вымываются, когда активный участок переходит к тому, что становится пассивным участком и окунается в резервуар.
Описанный выше способ имеет свойственные ему недостатки, одним из которых является тот факт, что он вызывает перемещение полуфабриката, а выравнивающее устройство, которое является намного более легким, чем изделие, при этом остается неподвижным.
Отрицательные последствия этого нетрудно вообразить. Тяжелые веса, с которыми необходимо оперировать роботу, отражаются в высокой стоимости установки и в такой же высокой стоимости эксплуатации и технического обслуживания, не говоря уже об увеличенных промежутках времени технологического процесса.
Другим недостатком является то, что выравнивание с использованием вышеописанного способа является относительно легким, если выравниваемые поверхности являются выпуклыми, но, наоборот, значительно затруднено или даже невозможно, если поверхности являются вогнутыми.
Другой недостаток состоит в том, что роботы должны быть выполнены с различными концевыми исполнительными органами для каждого различного манипулируемого изделия, так что для более широкого диапазона изделий требуется более высокое количество различных исполнительных органов.
Кроме того, модели движения, участвующие в манипуляции изделием, могут быть очень сложными, а это означает, что части изделия, которые приходят в соприкосновение с роботом, подвержены напряжению, которое не всегда является незначительным, и, следовательно, подвержены повреждению.
Это делает проблематичным управление относительно большими изделиями, такими как предметы сантехники, которые являются тяжелыми и хрупкими и которые не могут удерживаться подвешенными в воздухе без риска их поломки.
Еще один недостаток, связанный с восстановлением абразивного ремня в резервуаре с водой, состоит в том, что резервуар может иметь только одну, заранее определенную и не изменяемую, ориентацию в пространстве, а это устанавливает значительные ограничения на универсальность установки в части обеспечения наилучших рабочих условий для операций окончательной обработки.
Для преодоления вышеприведенных недостатков могут быть использованы вращающиеся инструменты (такие, как цилиндрические губки). Эти инструменты вращаются в то время, пока изделие (особенно «сырец») удерживается неподвижным в заранее определенном положении.
Эти инструменты, однако, также не лишены недостатков. Они должны часто очищаться для восстановления их эффективности после всего лишь нескольких проходов, а это значит, что их продуктивность не очень высока. Самое главное, что характерные особенности, присущие инструментам и системе приведения во вращение, требуют того, чтобы сделать невозможным удержание материала, удаляемого с изделий, что заканчивается его проливанием в окружающее пространство и на сами изделия.
Следовательно, цель настоящего изобретения состоит в создании устройства для осуществления окончательных операций и выравнивания поверхности, которое может преодолеть недостатки, присущие предшествующему уровню техники в области выравнивающих ремней, и наряду с этим в то же самое время предлагающего преимущества вращающихся инструментов.
В соответствии с вышеупомянутой целью этот результат достигается выравнивающим устройством, технические характеристики которого могут быть легко выведены из содержания приложенной формулы изобретения, особенно из пункта 1, и любого пункта формулы изобретения, зависимого, прямо или косвенно, от пункта 1.
Преимущества изобретения более очевидны из подробного описания, которое следует далее, со ссылками на сопровождающие чертежи, на которых проиллюстрированы предпочтительные варианты выполнения изобретения, выполненные только ради примера, без ограничения сущности изобретения, и на которых:
на фиг.1 показан вид спереди предложенного выравнивающего устройства с некоторыми частями, показанными схематически, а другими - вырезанными;
на фиг.2 показан вид сбоку устройства, изображенного на фиг.1;
на фиг.3 показан вид в увеличенном масштабе участка фиг.2, иллюстрирующий некоторые значительные части устройства;
на фиг.4 показан вид спереди другого варианта выполнения выравнивающего устройства, показанного на иллюстрациях, перечисленных выше, с некоторыми частями, вырезанными для того, чтобы лучше проиллюстрировать остальные;
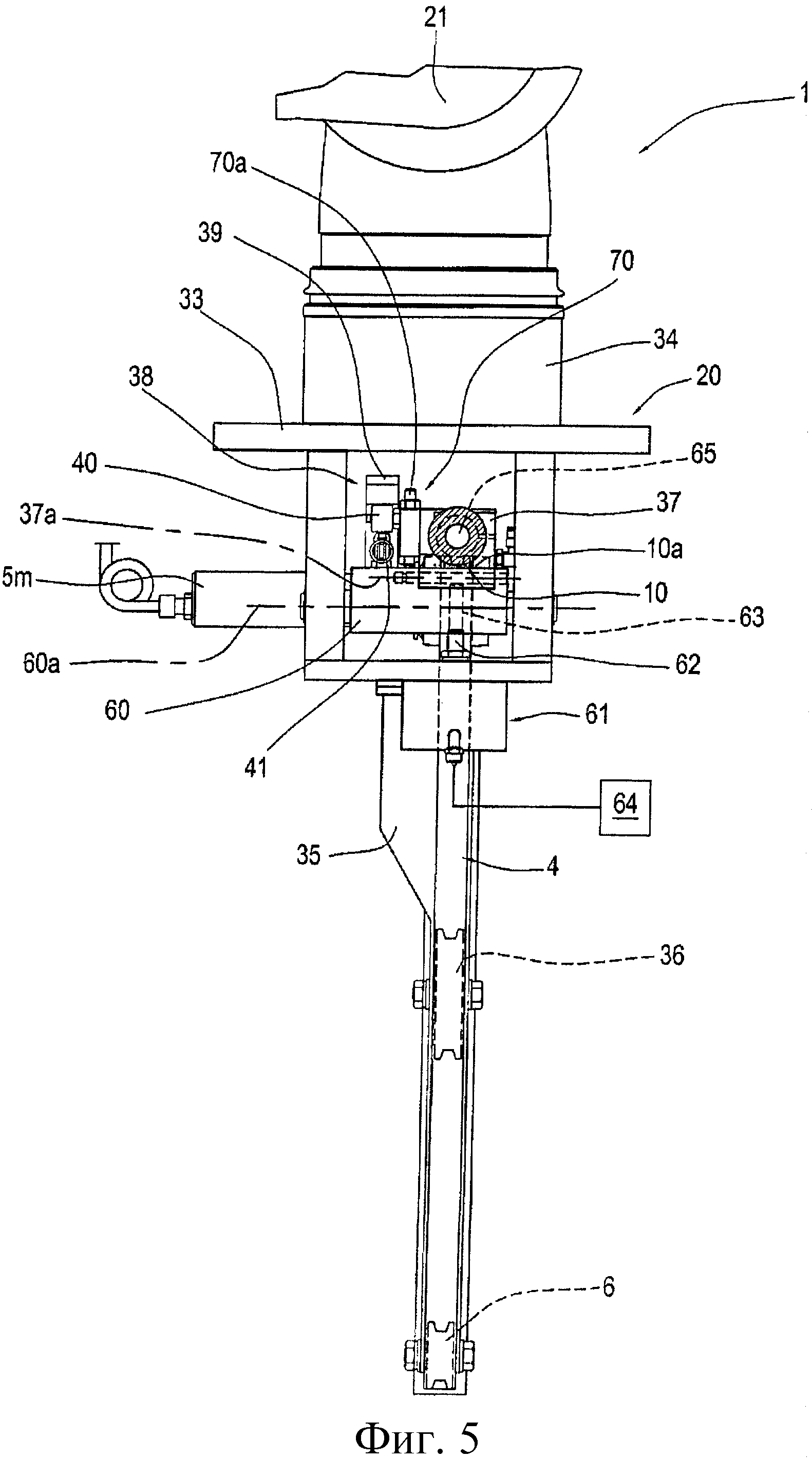
на фиг.5 показан вид сбоку выравнивающего устройства, изображенного на фиг.4, с некоторыми частями, показанными в поперечном сечении, а другими - вырезанными, для того, чтобы лучше проиллюстрировать некоторые детали;
на фиг.6 показан вид сзади выравнивающего устройства, изображенного на фиг.4 и 5;
на фиг.7 показана часть устройства, изображенного на фиг.5, на виде спереди и в частично неработающей конфигурации;
на фиг.8 показано поперечное сечение ремня, используемого в выравнивающем устройстве, изображенном на фиг.4-7;
на фиг.9 показан схематический вид в перспективе с некоторыми вырезанными частями другого варианта выполнения устройства, изображенного на фиг.1-3.
Опишем теперь со ссылками на фиг.1-3 предложенное выравнивающее устройство, обозначенное в целом номером 1 позиции, которое используется для выравнивания изделия 2 (показанного схематически, так как, строго говоря, оно не является частью изобретения), в частности полуфабриката керамического изделия, получаемого отливанием жидкой смеси (известной как «шликер» на жаргоне данной отрасли) в отливочную полость, образованную по меньшей мере двумя частями литейной формы.
Устройство 1 в основном содержит абразивный инструмент 3 в форме бесконечного ремня 4, который (в проиллюстрированном варианте выполнения) направляется вокруг по меньшей мере одной пары шкивов 5 и 6, из которых по меньшей мере один имеет механический привод (от соответствующего двигателя 5m), и который ограничивает активный участок 7 и пассивный участок 8 ремня 4:
- первый, активный, участок 7 обозначает часть, или ветвь, ремня 4, которая предназначена для удаления материала с изделия 2; в то время как
- второй, пассивный, участок 8 предназначен для получения непрерывной восстанавливающей обработки, которая восстанавливает абразивную способность инструмента 3, делая его подходящим для целей выравнивания, когда этот участок ремня 4 снова становится активным участком.
Устройство 1 также содержит:
- приводное устройство 20, действующее на ремень 4 с обеспечением возможности его перемещения в пространстве, окружающем изделие 2;
- средство 10, расположенное поблизости от ремня 4, для разбрызгивания жидкости на сам ремень 4, который имеет свойства впитывания жидкости;
- всасывающее средство 9, соединенное с пассивным участком 8 ремня 4 и функционирующее с обеспечением удаления задержанной им жидкости и отходов технологического процесса, то есть материалов, удаленных с изделия 2 в течение процесса выравнивания и задержанных ремнем 4.
Средство 20 обеспечивает соединение устройства 1 с манипулятором 21, предпочтительно управляемым роботом (проиллюстрированным частично, так как он известного типа).
Соединение устройства 1 с манипулятором 21, управляемым роботом или даже оператором вручную, обеспечивает перемещение ремня 4 в окружающем изделие 2 пространстве таким образом, чтобы его активный участок 7 был ориентирован к боковым поверхностям изделия 2 так, как это требуется для выравнивания.
В частности, снова обращаясь к фиг.1-3, отметим, что в первом варианте выполнения вышеупомянутая конструкция 20 может содержать качающийся несущий рычаг 22 (см. стрелку F22), шарнирно прикрепленный по оси 22а к опоре 23, присоединенной к фланцевому средству 24 для соединения с ручным или управляемым роботом манипулятором 21.
Нижний шкив 6 ремня 4 присоединен с возможностью вращения к первому рычагу 22 на его нижнем конце.
Верхний конец рычага 22 соединен с противовесом 25 для балансировки центра тяжести этого первого рычага 22 и, следовательно, ремня 4; таким образом ремень 4 удерживается в нейтральном положении, не зависимом от положения, принятого устройством 1 в целом. Другими словами, ремень 4 и первый рычаг 22 остаются в статичной, по существу неподвижной, конфигурации, особенно во время перемещений по направлению к изделию 2 и от него.
Первый рычаг 22 также снабжен регулируемыми средствами 26 ограничения движения и осуществления контакта, действующими между первым рычагом 22 и опорой 23 и предназначенными для обеспечения регулирования по меньшей мере одного устойчивого конечного положения, где первый рычаг 22 наиболее близок в угловом направлении к опоре 23 и где перемещение к ремню 4 прекращается, когда ремень 4 приходит в соприкосновение с изделием 2.
Что касается силы контакта, которую должен иметь активный участок 7 ремня 4 для оказания воздействия на изделие 2, то в изобретении предусмотрено толкающее средство 100, состоящее из цилиндра 101, установленного на опоре 23 и действующего на ролик 102, который закреплен на первом рычаге 22 и расположен эксцентрически по отношению к его центру 22а поворота; таким образом, активный участок 7 ремня 4 может прикладывать заранее заданное усилие контакта к изделию 2, даже в сочетании с манипулятором 21, в соответствии с толкающим усилием, приложенным цилиндром 101 (см. стрелку F101) к эксцентрическому ролику 102.
Номер позиции 103 обозначает блок (см. фиг.1), представляющий собой контрольное средство, действующее на цилиндр 101 и предназначенное для активации и деактивации цилиндра 101, когда это необходимо; деактивация цилиндра 101, очевидно, вызывает возвращение первого рычага 22 в нейтральное положение.
Средства 26 ограничения движения и осуществления контакта расположены в двух различных местах первого рычага 22, при этом каждое состоит из резьбового стержня 27, выступающего в поперечном направлении из первого рычага 22 и завинченного в соответствующее отверстие 28, выполненное в первом рычаге 22. Каждый из стержней 27 имеет концевую головку 29, выполненную для вхождения при использовании в контакт с соответствующими зонами опоры 23.
Упомянутый выше нижний шкив 6 его несущим валом 6а присоединен к внутренней части паза 30, выполненного в первом рычаге 22 таким образом, что, когда это необходимо, он может быть передвинут (см. стрелку F30) для регулирования натяжения ремня 4 за счет ослабления вала 6а в пазе 30 и, если необходимо, для замены самого ремня 4.
Как ясно показано на фиг.3, указанный верхний шкив 5 ремня 4 присоединен к его приводу 5m, который, в свою очередь, установлен на кронштейне 32, выступающем из первого рычага 22.
Как изложено ранее, для того, чтобы обеспечить непрерывное восстановление абразивных свойств ремня 4 в процессе работы, ремень 4 изготавливают из материала, который впитывает жидкость, например воду, которая разбрызгивается на ремень 4 указанным выше разбрызгивающим средством 10, которым укомплектовано устройство 1.
Более конкретно (см. также фиг.3), средство 10 разбрызгивания жидкости расположено поблизости от самого ремня 4.
В одном иллюстративном варианте выполнения, показанном на фиг.2, средство 10 может быть установлено непосредственно на контактном средстве 18 (описанном более подробно ниже) и содержать форсунки для разбрызгивания жидкости на ремень 4.
В частности, разбрызгивающее средство 10 может состоять из форсунок 10а, запутываемых от соответствующего источника 10b, расположенного выше по потоку относительно направления вращения (указанного стрелкой S) ремня 4, чем средство 9 создания отрицательного давления, так, что они обращены лицевой поверхностью к части пассивного участка 8 ремня 4.
Как только что было указано, устройство 1 также содержит средства 9 создания отрицательного давления, которые соединены с пассивным участком 8 ремня 4 и которые предназначены для удаления от ремня 4 жидкости, разбрызгиваемой на него разбрызгивающим средством 10, вместе с отходами технологического процесса, удаленными и задержанными ремнем 4 в течение активного этапа процесса выравнивания и перенесенными на пассивную стадию процесса выравнивания.
Средства 9 создания отрицательного давления включают в себя, в частности, ролик 11, который свободно вращается вокруг своей оси 15 вращения и находится в непосредственном, направленном по касательной, соприкосновении с пассивным участком 8 ремня 4.
Ролик 11, имеющий цилиндрическую форму, соединен с возможностью вращения соосно с полым пальцем 17, который внутри себя ограничивает полость 12.
Ролик 11 также имеет цилиндрическую наружную боковую рабочую поверхность 11a, в которой выполнены сквозные отверстия 11b, предназначенные для сообщения наружной части и внутренней части полости 12 через щель 17с, образованную в полом пальце 17 так, что она обращена к пассивному участку 8 ремня 4.
Боковая поверхность 11а ролика 11 имеет буртики 16, имеющие охватывающую форму, соответствующую противоположным продольным краям ремня 4.
Полость 12 внутри полого пальца 17 предназначена для отсасывания жидкости и отходов процесса выравнивания через ролик 11, то есть через отверстия 11b в боковой поверхности 11a и через щель 17c; всасывание производится благодаря отрицательному давлению внутри полости 12, созданного за счет проточного соединения полости 12 со средством 31m создания разрежения, таким как, например, вакуумный насос, изображенный на фиг.3 в виде блока, так как оно является полностью традиционным, а также за счет непосредственного соединения полости 12 с отверстиями 11b через щель 17c в пальце 17.
Иначе говоря, ролик 11 свободно поворачивается вместе с ремнем 4, и когда часть поверхности ролика 11c отверстиями 11b приходит в контакт с пассивным участком 8 и отверстия совмещаются со щелью 17c, то тогда отходы технологического процесса удаляются с пассивного участка 8 за счет производимого засасывания.
Более конкретно, ролик 11 удерживается в непосредственном принудительном соприкосновении с ремнем 4 с помощью контактного устройства 18, которое включает в себя несущий рычаг 18а и упругие элементы 19, помещенные между роликом 11 и первым рычагом 22 и которые функционируют таким образом, чтобы прижимать ролик 11 к ремню 4 для того, чтобы произвести максимальным воздействие уплотнения и, следовательно, эффективность засасывания.
Очевидно, что продукты, засасываемые в полость 12 и состоящие, как уже изложено, из жидкости и отходов технологического процесса, когда они достигают внутренней области полости 12, затем переносятся за счет отрицательного давления вдоль переносящего средства 31, соединенного в контур с вакуумным насосом 31m (см. стрелку F31m).
На фиг.4-7 показан второй вариант выполнения устройства 1.
В этом конкретном случае несущая конструкция 20 ремня 4 содержит:
- коробчатую раму 33, оборудованную на ее верхней части фланцевым средством 34 для присоединения к вышеуказанному манипулятору 21 и имеющую внутри себя указанное выше разбрызгивающее средство 10, средство 9 создания отрицательного давления, действующее (в данном случае) на дугообразный пассивный участок 8 ремня 4, проходящий над верхним шкивом 5, который установлен с возможностью вращения внутри рамы 33 и оборудован соответствующим приводом 5m;
- жесткую опору 35, соединенную с коробчатой рамой 33 и проходящую вниз от последней вплоть до нижнего конца нижнего шкива 6 ремня 4.
Опора 35 также имеет в своей середине вспомогательное ведомое колесо 36, которое присоединено с возможностью вращения к опоре 35 и находится в двухстороннем соприкосновении с выступающим внутренним профилем ремня 4 таким образом, чтобы обеспечить более легкое скольжение последнего.
Разбрызгивающее средство 10, средство 9 создания отрицательного давления, верхний шкив 5 и соответствующий привод 5m установлены на первом элементе 60, расположенном внутри рамы 33 и шарнирно прикрепленном к самой раме 33 на его конце, в точке 60а.
Элемент 60 испытывает воздействие со стороны натягивающего средства 61, состоящего из цилиндра 62, расположенного в нижней части рамы 33, выступающего вертикально внутрь рамы 33 и действующего на ведомый ролик 63, присоединенный в точке 63а к элементу 60 и расположенный эксцентрически по отношению к центру вращения 60а этого элемента; таким образом, перемещение элемента 60 вверх или вниз (см. стрелку F60 на фиг.4) передвигает верхний шкив 5 таким образом, чтобы натягивать или ослаблять ремень 4.
Номер позиции 64 обозначает блок (см. фиг.4-7), изображающий средство управления, действующее на цилиндр 62 и предназначенное для активации и деактивации цилиндра 62, когда это необходимо и чтобы таким образом управлять усилием, прикладываемым цилиндром 62 к ролику 63, сохраняя тем самым под контролем натяжение ремня 4.
Что касается разбрызгивающего средства 10 и средства 9 создания отрицательного давления, то последнее выполнено в части 37 элемента 60, которая шарнирно прикреплена в точке 37a к самому элементу 60 таким образом, чтобы обеспечить поворот части 37 между:
- опущенным рабочим положением, в котором средство 10 разбрызгивания и средство 9 создания отрицательного давления находятся в соприкосновении с пассивным участком 8 ремня 4 (см. стрелку F37 на фиг.4);
- поднятым нерабочим положением, в котором средство 10 разбрызгивания и средство 9 создания отрицательного давления отведены от верхнего шкива 5 и от ремня 4 таким образом, чтобы последний мог быть заменен (см. стрелку F37a на фиг.7) в то время, пока цилиндр 62 деактивирован.
В этом случае средство 9 создания отрицательного давления (см. фиг.4 и 7) состоит из замкнутой цилиндрической камеры 65, снабженной прорезью 65а (см. фиг.7), которая может быть расположена обращенной лицевой частью к пассивному участку 8 ремня 4, когда часть 37 находится в опущенном положении.
Отрицательное давление создается в камере 65 с помощью подходящего средства 65b, которое в этом случае, исключительно в виде примера, реализовано элементом Вентури, частично показанным на фиг.7, через который за счет засасывания удаляются отходы технологического процесса, проходящие в трубу 65с (см. стрелку F65c) и затем выбрасываемые.
Разбрызгивающее средство 10 содержит два набора форсунок 10а, выполненных на части 37 на противоположных сторонах цилиндрической камеры 65: устройство 10b подвода жидкости, очевидно, активируется тем или другим из этих наборов форсунок 10а в зависимости от направления S вращения ремня 4 и таким образом, что ремень 4 всегда обрызгивается перед тем, как он перемещается за цилиндрическую камеру 65, а это означает, что ремень 4 может работать в обоих направлениях вращения.
Между частью 37 и элементом 60 предусмотрено средство 38 для фиксирования вмещающей части 37 в опущенном рабочем положении для того, чтобы она могла быть устойчиво размещена над ремнем 4.
Фиксирующее средство 38 содержит вертикальный рычаг 39, шарнирно прикрепленный на одном из его концов, в точке 39а, к элементу 60 и выполненный с возможностью зацепления путем фиксации на его свободном противоположном конце с пальцем 40, который выступает сбоку из части 37 и который может быть расположен рядом с рычагом 39, когда часть 37 находится в опущенном рабочем положении.
Между рычагом 39 и элементом 60 помещен упругий элемент 41 для того, чтобы удерживать рычаг 39 постоянно в контакте с пальцем 40.
Другими словами, когда часть 37 опускается к ремню 4, то тогда палец 40 приходит в соприкосновение со скругленной головкой рычага 39, который, в свою очередь, отодвигается для того, чтобы позволить проход части 37 и пальца 40, растягивая тем самым упругий элемент, или пружину, 41; как только палец 40 прошел, рычаг 39 под тянущим действием пружины 41 возвращается в выдвинутое положение, фиксируя тем самым палец 40 под собой и, соответственно, удерживая часть 37 на месте; это удерживает часть 37 правильно расположенной на пассивном участке 8 ремня 4, обеспечивая удаление материала с ремня 4 посредством цилиндрической камеры 65 за счет засасывания.
Для достижения оптимального положения части 37 в любой момент времени между частью 37 и элементом 60 выполнено регулируемое средство 70 ограничения движения (см. также фиг.5 и 6); средство 70 содержит болт 70а, закрученный в сквозное резьбовое отверстие, выполненное в части 37 так, что его нижний конец входит в контакт с поверхностью элемента 60, когда часть 37 находится в опущенном положении.
Закручивание или откручивание болта 70а соответственно перемещает часть 37 по направлению к ремню 4 или от него в соответствии с толщиной ремня 4 и состоянием его изношенности и, следовательно, согласно потребности в перемещении цилиндрической всасывающей камеры 65 по направлению к пассивному участку 8 ремня 4 или от него.
Ремень 4 может иметь четырехугольное поперечное сечение и постоянную толщину или четырехугольное поперечное сечение и постоянную толщину с внутренним выступающим профилем, проходящим вдоль его средней части (см. фиг.8), для более эффективного направления ремня 4 вокруг приводных шкивов.
Устройство 1, изготовленное, как описано выше, обеспечивает выравнивание типичного изделия 2 любой формы, удерживаемого неподвижным, в то время как перемещается только инструмент 3.
Это обеспечивает многочисленные преимущества.
Так как движущейся частью устройства является инструмент 3, который гораздо легче, чем изделие 2 (по меньшей мере когда последнее представляет собой полуфабрикат керамического изделия), то управляемый роботом манипулятор, требуемый для привода инструмента 3, может быть относительно небольшим и недорогим.
К тому же возможность достаточно свободного ориентирования ремня 4 обеспечивает доступ изделия 2 не только для активных участков 7 ремня 4, но также для его частей, например, около криволинейной области, где ремень 4 движется вокруг шкивов.
Это означает, что инструмент 3 может работать также на малых и/или, при необходимости, даже вогнутых частях поверхности изделия 2.
Кроме того, ремень 4 восстанавливается системой принудительного всасывания, которая не только не имеет влияния на конструкцию устройства 1, но также имеет преимущество, заключающееся в том, что она является очень эффективной в удалении отходов технологического процесса и, соответственно, обеспечивает высокую эффективность восстановления.
Другой преимущественный аспект изобретения проистекает из того факта, что два приводящих узла, описанные выше, могут быть использованы для множества изделий 2 различных форм и размеров, с очевидными преимуществами в части универсальности, так как устройство 1 применимо для широкого диапазона типичных изделий 2.
Во втором описанном варианте выполнения особая конструкция жесткой опоры 35 позволяет ремню 4 располагаться даже горизонтально для того, чтобы иметь возможность работать даже на тех частях изделия 2, доступ к которым затруднен, что добавляется к тому факту, что применение изогнутого участка ремня на верхнем шкиве 5 в качестве области восстановления дает возможность иметь два активных участка ремня 4, доступные в любое время.
В первом предпочтительном варианте выполнения изобретения, как описано выше, ролик 11 установлен сбоку от двух шкивов 5 и 6, вокруг которых направляется ремень, и действует как средство натяжения ремня 4 благодаря надавливанию, которое он оказывает на пассивный участок 8.
Следует понимать, тем не менее, что возможны многочисленные варианты этого варианта выполнения, из которых легче всего представить тот, в котором ролик 11 может быть встроен в один из шкивов 5 или 6, вокруг которых направляется ремень 4; в этом случае ремень является ремнем типа листа Мебиуса (что ясно показано на фиг.9).
Описанное выше изобретение допускает промышленное применение и может быть модифицировано и приспособлено несколькими путями без отступления при этом от сущности изобретения. Кроме того, все элементы изобретения могут быть заменены технически эквивалентными элементами.
Реферат
Изобретение относится к строительству, а именно к устройству для окончательной обработки керамических изделий путем выравнивания их поверхностей в течение процесса изготовления. Устройство для выравнивания изделия, в частности полуфабриката керамического изделия, содержит абразивный инструмент в форме бесконечного ремня, направляемого вокруг по меньшей мере одной пары шкивов, по меньшей мере один из которых снабжен механическим приводом, и имеющего по меньшей мере один активный участок и по меньшей мере один пассивный участок, причем указанный активный участок выполнен с возможностью удаления материала с изделия, в то время как указанный пассивный участок подвергается восстанавливающей обработке, которая восстанавливает абразивную способность инструмента, причем устройство дополнительно содержит: приводное средство, действующее на ремень с обеспечением возможности его перемещения в пространстве, окружающем изделие, средство разбрызгивания жидкости на ремень, расположенное поблизости от ремня, который имеет свойства впитывания жидкости, и средство создания отрицательного давления, соединенное с пассивным участком ремня и действующее с обеспечением удаления задержанных им жидкости и отходов технологического процесса. Технический результат - повышение качества обработки изделия, снижение стоимости установки, эксплуатации и технического обслуживания. 35 з.п. ф-лы, 9 ил.
Формула
приводное средство (20), действующее на ремень (4) с обеспечением возможности его перемещения в пространстве, окружающем изделие (2);
средство (10) разбрызгивания жидкости на ремень (4), расположенное поблизости от ремня (4), который имеет свойства впитывания жидкости;
средство (9) создания отрицательного давления, соединенное с пассивным участком (8) ремня (4) и действующее с обеспечением удаления задержанных им жидкости и отходов технологического процесса.
коробчатую раму (33), снабженную на ее верхней части фланцевым средством (34) для соединения с манипулятором (21) и поддерживающую внутри нее разбрызгивающее средство (10), при этом средство (9) создания отрицательного давления действует на дугообразный пассивный участок (8) ремня (4), проходящий над верхним шкивом (5), который установлен с возможностью вращения внутри рамы (33) и оборудован соответствующим приводом (5m);
жесткую опору (35), соединенную с коробчатой рамой (33) и проходящую вниз от последней вплоть до нижнего конца нижнего шкива (6) ремня (4).
Комментарии