Система и способ определения траектории для транспортного средства - RU2681984C1
Код документа: RU2681984C1
Чертежи


Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Здесь раскрыты система и способ принятия решений с множеством стратегий, в которых используется информация о траектории других второстепенных транспортных средств для определения планируемой траектории для основного транспортного средства.
УРОВЕНЬ ТЕХНИКИ
Автономное транспортное средство должно оценивать последствия возможных действий путем прогнозирования неопределенных намерений других участников дорожного движения, например, транспортных средств. Будущие действия других участников дорожного движения зависят от планируемых траекторий, управляющих их поведением, которые в общем неизвестны, и дополнительно зависят от взаимодействий между участниками. Простое экстраполирование траекторий других транспортных средств не может давать представление об их намерениях для будущих действий.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Система содержит компьютер, включающий в себя процессор и память, причем память хранит инструкции, исполняемые процессором так, что компьютер запрограммирован с возможностью: определения из первого транспортного средства одного или более второстепенных транспортных средств в пределах заданного расстояния от первого транспортного средства; приема данных о работе каждого из одного или более второстепенных транспортных средств, причем данные включают в себя по меньшей мере данные о траектории для каждого из второстепенных транспортных средств; определения по меньшей мере частично на основании данных распределения вероятностей для каждого второстепенного транспортного средства; причем каждая из вероятностей связана с возможной планируемой траекторией соответственного транспортного средства; определения планируемой траектории для первого транспортного средства по меньшей мере частично на основании соответственных распределений вероятностей каждой из множества возможных планируемых траекторий каждого из одного или более второстепенных транспортных средств; и обеспечения инструкции по меньшей мере одному контроллеру, связанному с первым транспортным средством, на основании определенной планируемой траектории.
В системе планируемая траектория дополнительно указывает одну или более альтернативных траекторий, причем каждая из альтернативных траекторий связана с возможными планируемыми траекториями одного или более второстепенных транспортных средств.
В системе компьютер дополнительно запрограммирован с возможностью: определения одной или более подходящих планируемых траекторий для первого транспортного средства; выполнения одного или более прямых моделирований по меньшей мере частично на основании подходящих планируемых траекторий для первого транспортного средства и распределения вероятностей для каждого второстепенного транспортного средства, причем определение планируемой траектории для первого транспортного средства дополнительно частично основано на результатах одного или более прямых моделирований.
В системе выполнение каждого из одного или более прямых моделирований включает в себя: выбор выборочной планируемой траектории для первого транспортного средства из подходящих планируемых траекторий; выбор выборочной планируемой траектории для каждого из одного или более второстепенных транспортных средств из соответственного множества возможных планируемых траекторий; и выполнение прямого моделирования на основании выбранных выборочных планируемых траекторий для первого и одного или более второстепенных транспортных средств.
В системе компьютер дополнительно запрограммирован с возможностью: определения одного или более вознаграждений, отражающих желаемый результат; причем определение планируемой траектории для первого транспортного средства дополнительно частично основано на определенных вознаграждениях.
В системе компьютер дополнительно запрограммирован с возможностью: сравнения результата одного или более прямых моделирований в отношении каждого из определенных одного или более вознаграждений; присваивания по меньшей мере частично на основании сравнения взвешенного значения результату прямого моделирования в отношении каждого из определенных одного или более вознаграждений; вычисления суммы взвешенных значений результата для каждого из одного или более прямых моделирований в отношении каждого из определенных одного или более вознаграждений; и определения прямого моделирования из одного или более прямых моделирований с наибольшей суммой, причем определение планируемой траектории для первого транспортного средства по меньшей мере частично основано на выбранной выборочной планируемой траектории, использованной для первого транспортного средства в определенном прямом моделировании.
В системе компьютер дополнительно запрограммирован с возможностью: определения точек изменения в траектории каждого из соответственных второстепенных транспортных средства, причем точки изменения указывают точки вдоль траектории, в которых определено, что планируемая траектория для второстепенного транспортного средства изменена с одной планируемой траектории на другую планируемую траекторию.
В системе компьютер дополнительно запрограммирован с возможностью: определения сегментов между каждой смежной парой точек изменения вдоль соответственного пути для каждого второстепенного транспортного средства; и определения скрытой планируемой траектории, которая соответствует траектории соответственного второстепенного транспортного средства в каждом определенном сегменте.
В системе определение соответственных распределений вероятностей для каждого из одного или более второстепенных транспортных средств основано на определенных скрытых планируемых траекториях для каждого сегмента вдоль пути соответственного второстепенного транспортного средства.
В системе компьютер дополнительно запрограммирован с возможностью: определения на основании данных, что поведение одного из одного или более второстепенных транспортных средств не может быть объяснено любой из множества доступных планируемых траекторий.
Способ содержит этапы, на которых: определяют из первого транспортного средства одно или более второстепенных транспортных средств в пределах заданного расстояния от первого транспортного средства; принимают данные о работе каждого из одного или более второстепенных транспортных средств, причем данные включают в себя по меньшей мере данные о траектории для каждого из второстепенных транспортных средств; определяют по меньшей мере частично на основании данных распределение вероятностей для каждого второстепенного транспортного средства; причем каждая из вероятностей связана с возможной планируемой траекторией соответственного транспортного средства; определяют планируемую траекторию для первого транспортного средства по меньшей мере частично на основании соответственных распределений вероятностей каждой из множества возможных планируемых траекторий каждого из одного или более вторых транспортных средств; и обеспечивают инструкцию по меньшей мере одному контроллеру, связанному с первым транспортным средством на основании определенной планируемой траектории.
В способе планируемая траектория дополнительно указывает одну или более альтернативных траекторий, причем каждая из альтернативных траекторий связана с возможными планируемыми траекториями одного или более второстепенных транспортных средств.
Способ дополнительно содержит этапы, на которых: определяют одну или более подходящих планируемых траекторий для первого транспортного средства; выполняют одно или более прямых моделирований по меньшей мере частично на основании подходящих планируемых траекторий для первого транспортного средства и распределения вероятностей для каждого из одного или более второстепенных транспортных средств, причем определение планируемой траектории для первого транспортного средства дополнительно частично основано на результатах одного или более прямых моделирований.
В способе выполнение каждого из одного или более прямых моделирований включает в себя этапы, на которых: выбирают выборочную планируемую траекторию для первого транспортного средства из подходящих планируемых траекторий; выбирают выборочную планируемую траекторию для каждого из одного или более второстепенных транспортных средств из соответственного множества возможных планируемых траекторий; и выполняют прямое моделирование на основании выбранных выборочных планируемых траекторий для первого и одного или более вторых транспортных средств.
Способ дополнительно содержит этап, на котором определяют одно или более вознаграждений, отражающих желаемый результат, причем определение планируемой траектории для первого транспортного средства дополнительно частично основано на определенных вознаграждениях.
Способ дополнительно содержит этапы, на которых: сравнивают результат одного или более прямых моделирований в отношении каждого из определенных одного или более вознаграждений; присваивают по меньшей мере частично на основании сравнения взвешенное значение результату прямого моделирования в отношении каждого из определенных одного или более вознаграждений; вычисляют сумму взвешенных значений результата для каждого из одного или более прямых моделирований в отношении каждого из определенных одного или более вознаграждений; и определяют прямое моделирование из одного или более прямых моделирований с наибольшей суммой, причем определение планируемой траектории для первого транспортного средства по меньшей мере частично основано на выбранной выборочной планируемой траектории, использованной для первого транспортного средства в определенном прямом моделировании.
Способ дополнительно содержит этап, на котором: определяют точки изменения траектории каждого из соответственных второстепенных транспортных средств, причем точки изменения указывают точки вдоль траектории, в которых определено, что планируемая траектория для второстепенного транспортного средства изменена с одной планируемой траектории на другую планируемую траекторию.
Способ дополнительно содержит этапы, на которых: определяют сегменты между каждой смежной парой точек изменения вдоль соответственного пути для каждого второстепенного транспортного средства; и определяют скрытую планируемую траекторию, которая соответствует траектории соответственного второстепенного транспортного средства в каждом определенном сегменте.
В способе определение соответственных распределений вероятностей для каждого из одного или более второстепенных транспортных средств основано на определении скрытых планируемых траекторий для каждого сегмента вдоль пути соответственного второстепенного транспортного средства.
Способ дополнительно содержит этап, на котором: определяют на основании данных, что поведение одного из одного или более второстепенных транспортных средств не может быть объяснено любой из множества доступных планируемых траекторий.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фигура 1 представляет собой схему примерной дорожной среды.
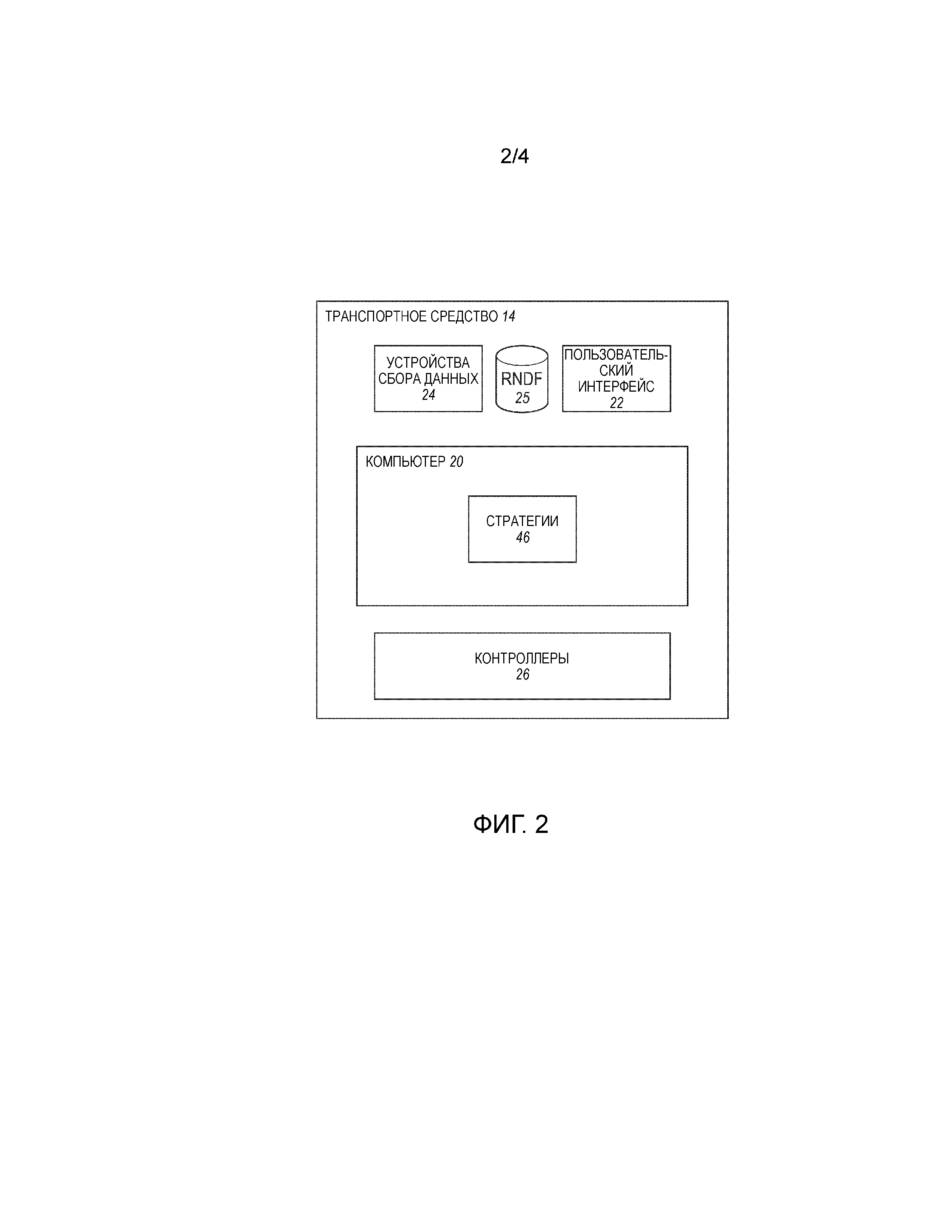
Фигура 2 представляет собой схему системы автономного движения, включающей в себя систему принятия решений с множеством стратегий.
Фигура 3 представляет собой схему, иллюстрирующую сегментацию истории движения участника в дорожной среде.
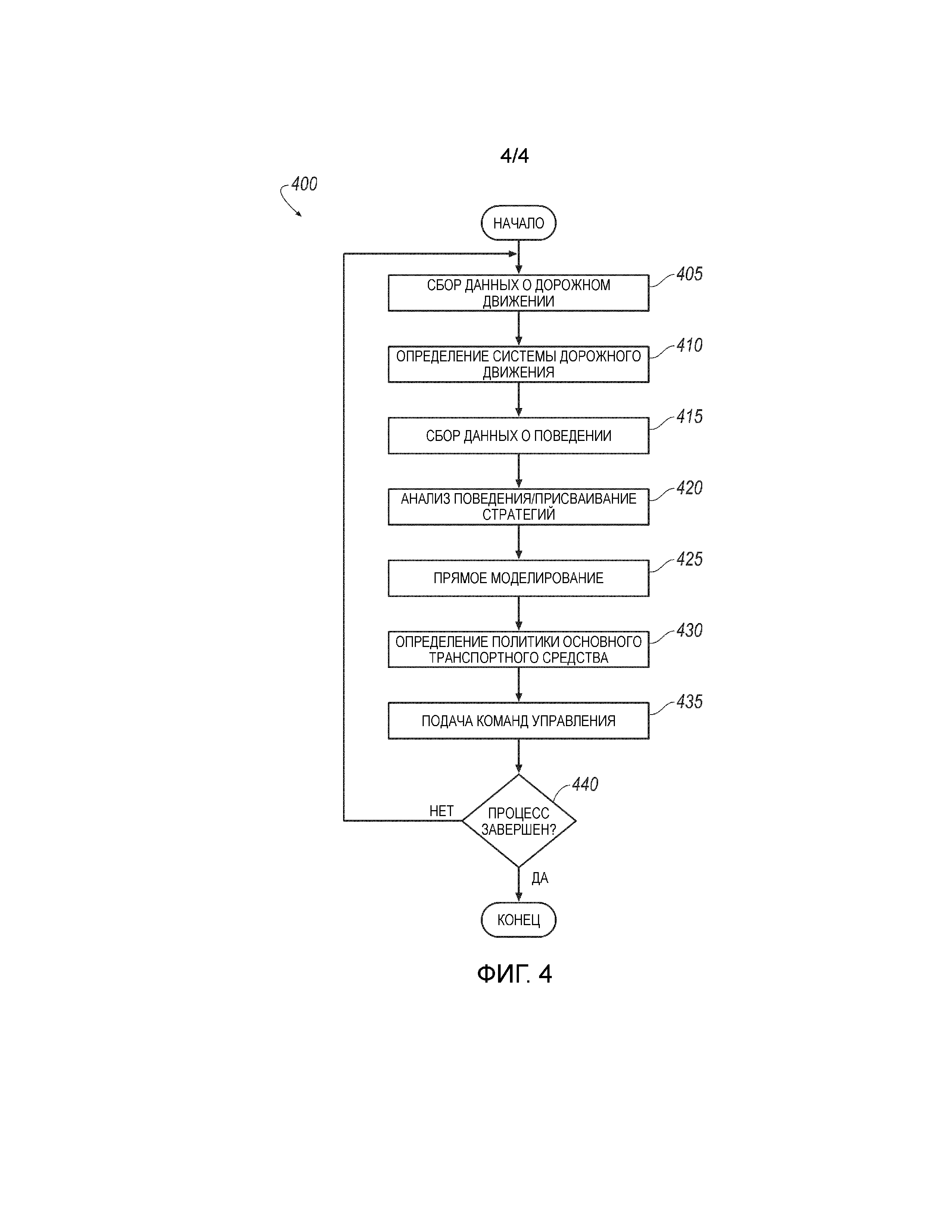
Фигура 4 представляет собой блок-схему примерного процесса для управления транспортным средством, использующим систему принятия решений с множеством стратегий.
ПОДРОБНОЕ ОПИСАНИЕ
ОБЗОР СИСТЕМЫ
Система принятия решений с множеством стратегий предпочтительно использует информацию о траектории других второстепенных транспортных средств для определения планируемой траектории для основного транспортного средства. Система принимает данные, описывающие недавнюю траекторию каждого из второстепенных транспортных средств, и определяет сегменты в соответственных траекториях, которые могут быть объяснены стратегией из дискретного множества предварительно определенных стратегий. В данном контексте выражение «стратегия» означает множество из одного или более правил для определения траектории транспортного средства. Конкретнее, «стратегия» представляет собой намерение в отношении траектории транспортного средства в момент времени. Примеры стратегий обеспечены подробно ниже и включают в себя сохранение или изменение полос движения, аварийную остановку, обгон второстепенного транспортного средства и т.д.
На основании сегментации соответственных траекторий система принятия решений с множеством стратегий определяет распределения вероятных стратегий, определяющих будущие траектории каждого из второстепенных транспортных средств. На основании этих распределений система принятия решений с множеством стратегий дополнительно определяет одну или более подходящих стратегий для определения траектории основного транспортного средства.
Система принятия решений с множеством стратегий далее выбирает выборочные стратегии для каждого из транспортных средств, выполняет прямое моделирование дорожной среды в течение временного горизонта и сравнивает результаты с установленным множеством вознаграждений. Процесс многократно повторяется для определения и регулировки стратегии для определения траектории основного транспортного средства. Использование дискретного множества предварительно определенных стратегий для категоризации работы транспортного средства предпочтительно уменьшает сложность моделирования взаимодействия транспортных средств в дорожной среде.
Система принятия решений с множеством стратегий для транспортных средств основана на обобщенном процессе принятия решений, применяемом к динамическим неопределенным средам, которые характеризуются высокоинтерактивной связью между участниками, как здесь раскрыто.
ОБЩИЙ ПРОЦЕСС ПРИНЯТИЯ РЕШЕНИЙ
Пусть V обозначает множество транспортных средств, взаимодействующих в ближайшей окрестности, например, в пределах заданного расстояния, например, 250 метров, от основного транспортного средства, включая само основное транспортное средство. В момент времени t транспортное средство v ∈ V может выполнять действие









Динамика транспортного средства моделируется с использованием функции условной вероятности





Цель нашего транспортного средства заключается в поиске оптимальной стратегии



где R(xt) представляет собой действительную функцию вознаграждения R: X→R. Изменение p(xt) с течением времени регулируется посредством

Горизонт H принятия решений может представлять собой, например, заданное время, например, 30 секунд. Альтернативно горизонт H принятия решений может быть определен, например, на основании типа дорожной ситуации, например, приближение к перекрестку, движение по автомобильной дороге и т.д. Другие факторы, такие как факторы окружающей среды также могут быть рассмотрены при определении горизонта H принятия решений.
Модель движения





и допущение о независимости, в конечном счете, приводит к

Несмотря на допущение независимых действий транспортных средств, маргинализацию в течение длительного состояния, пространства наблюдений и действий в Уравнении 4 слишком затратны в вычислительном отношении для своевременного поиска оптимальной стратегии. Возможная аппроксимация для ускорения процесса заключается в решении Уравнения 1 путем составления выборки из

ПОДХОД С МНОЖЕСТВОМ СТРАТЕГИЙ
Следующие две ключевые аппроксимации сделаны для того, чтобы производить выборку из вероятных взаимодействий дорожных агентов:
1. В любой заданный момент времени и основное транспортное средство, и второстепенные транспортные средства выполняют стратегию, выбранную из дискретного множества стратегий.
2. Модели динамики и наблюдений транспортных средств аппроксимированы посредством детерминированного замкнутого прямого моделирования всех транспортных средств с присвоенными стратегиями. Замкнутые моделирования учитывают возможные взаимодействия между агентами на основании присвоенных стратегий.
С помощью этих аппроксимаций последствия принятия решений могут быть оценены по ограниченному множеству высокоуровневого поведения, определяемого доступными стратегиями (и для основного транспортного средства, и для других агентов), вместо выполнения оценки для каждого возможного ввода управления каждого транспортного средства.
Пусть П представляет собой дискретное множество стратегий, где каждая стратегия отражает определенное высокоуровневое поведение при движении, включая планируемую траекторию. Пусть каждая стратегия



где



Наконец, так как стратегия, выполняемая основным транспортным средством q ∈ V, может быть полностью управляемой, мы может отделить основное транспортное средство от других агентов в


Следовательно, пространство действий из

ПРИМЕРНАЯ ДОРОЖНАЯ СРЕДА
Примерная дорожная среда 10 проиллюстрирована на Фигуре 1. Дорожная среда 10 включает в себя автомобильную дорогу 12, основное транспортное средство 14, первое второстепенное транспортное средство 16а и второе второстепенное транспортное средство 16b. В примерной дорожной среде 10 основное транспортное средство 14 представляет собой транспортное средство, запрограммированное с возможностью использования системы принятие решений с множеством стратегий для по меньшей мере некоторых решений о движении. Второстепенные транспортные средства 16 представляют собой транспортные средства, отличные от основного транспортного средства 14. Следует понимать, что приведенное здесь утверждение, что «транспортное средство, запрограммировано» означает, что транспортное средство включает в себя компьютер, который запрограммирован, как описано, например, компьютер 20, который рассмотрен ниже.
Основное транспортное средство 14 запрограммировано с возможностью определения дорожной среды 10, которая включает в себя основное транспортное средство 14 и одно или более второстепенных транспортных средств 16 в пределах заданного расстояния от основного транспортного средства 14. Заданное расстояние от основного транспортного средства 14 может быть определено, например, как находящееся в пределах первого фиксированного расстояния в первом заданном направлении, например, 20 метров с левой или правой стороны основного транспортного средства 14, и в пределах второго фиксированного расстояния во втором заданном направлении, например, 100 метров от передней или задней части основного транспортного средства 14. Определение «заданное расстояние» может дополнительно или альтернативно находиться в зависимости от конкретной дорожной ситуации. Например, меньшая область может рассматриваться как находящаяся в пределах заданного расстояния от основного транспортного средства 14 в ситуации на парковке, и большая область может рассматриваться как находящаяся в пределах заданного расстояния от основного транспортного средства 14 на автомобильной дороге. Дополнительно заданное расстояние от основного транспортного средства 14 может быть определено в зависимости от других условий, например, скорости основного транспортного средства 14, погодных условий, условий освещения (дневного или ночного) и т.д.
Основное транспортное средство 14 дополнительно запрограммировано с возможностью сбора данных, относящихся к недавней истории движения каждого из одного или более второстепенных транспортных средств 16, и с возможностью выполнения анализа точек изменений в каждой из историй движения второстепенных транспортных средств 16. Основное транспортное средство 14 делит недавнюю историю движения каждого из второстепенных транспортных средств 16 на сегменты и определяет распределение вероятных стратегий 46 (Фигура 2), например, движение по полосе движения, поворот на перекрестке и т.д., которые определяются второстепенным транспортным средством 16 в каждом из сегментов.
На основании распределения вероятных стратегий 46 для каждого из других транспортных средств 16 в дорожной среде 10 основное транспортное средство 14 дополнительно запрограммировано с возможностью определения одной или более стратегий 46 для управления его поведением. Одно или более замкнутых моделирований дорожной среды 10 выполняются на основании выборок из распределений стратегий 46 других транспортных средств 16 и основного транспортного средства 14. Например, объединенное второстепенное транспортное средство 16 может ускоряться, а основное транспортное средство 14 может замедляться, чтобы освобождать место для него. Результаты моделирований сравниваются с функцией вознаграждения, т.е. множеством желаемых результатов для дорожной среды 10. На основании результатов одного или более моделирований основное транспортное средство 14 дополнительно запрограммировано с возможностью принятия решения о стратегии 46 для управления поведением при движении в текущем временном такте. Временной такт может быть определен как период времени между последовательными обновлениями стратегии для управления основным транспортным средством. Временной такт для системы принятия решений с множеством стратегий может быть периодическим, например, в диапазон от одного до четырех герц. Таким образом, основное транспортное средство 14 может принимать многократные решения о движении на основании связанных взаимодействий с второстепенными транспортными средствами 16.
В некоторых случаях транспортное средство 14 может обнаруживать аномальное поведение одного или более других транспортных средств 16, которое не может быть объяснено множеством стратегий 46 доступных для среды 10, например, движение в неверном направлении по автомобильной дороге, хаотичное движение и т.д. В этом случае одна стратегия, отвечающая только за текущее состояние и карту среды, может быть выбрана для моделирования второстепенного транспортного средства 16, имеющего аномальное поведение.
Стратегии могут включать в себя условия для учета взаимодействия с транспортными средствами, имеющими аномальное поведение. Например, стратегия номинальной полосы движения, управляющая основным транспортным средством 14, может обеспечивать следование на большем расстоянии, если второстепенное транспортное средство 16 перед основным транспортным средством 14 отмечено как аномальное.
Дополнительно в некоторых случаях принятие решений с множеством стратегий может быть приостановлено, когда обнаружено второстепенное транспортное средство 16, имеющее аномальное поведение, и может быть применена альтернативная форма принятия решений о движении.
ПРИМЕРНЫЕ ЭЛЕМЕНТЫ СИСТЕМЫ
Примерное основное транспортное средство 14, запрограммированное с возможностью использования системы принятие решений с множеством стратегий для принятия решений о движении, показано на Фигуре 2. Основное транспортное средство включает в себя компьютер 20, пользовательский интерфейс 22, одно или более устройств 24 сбора данных, файл 25 определения дорожной сети (RNFD) и один или более контроллеров 26. Основное транспортное средство 14 в общем представляет собой наземное транспортное средство, имеющее три или более колес, например, пассажирское транспортное средство, грузовой автомобиль малой грузоподъемности и т.д. Основное транспортное средство 14 имеет переднюю часть, заднюю часть, левую сторону и правую сторону, причем выражения передний, задний, левый и правый понимаются с позиции водителя основного транспортного средства 14, сидящего на сиденье водителя в стандартном рабочем положении, т.е. лицом к рулевому колесу.
Компьютер 20 в общем включает в себя процессор и память, причем память включает в себя одну или более форм машиночитаемого носителя и хранит инструкции, исполняемые процессором для выполнения различных операций, включая раскрытые здесь. Дополнительно компьютер 20 может включать в себя и/или быть соединен с возможностью сообщения с одним или более другими вычислительными устройствами, встроенными в основное транспортное средство 14 для мониторинга и/или управления различными компонентами транспортного средства. Компьютер 20 в общем запрограммирован и выполнен с возможностью связи по шине локальной сети контроллеров (CAN) или т.п.
Компьютер 20 также может иметь соединение с бортовым диагностическим разъемом (OBD II), шиной CAN (локальная сеть контроллеров) и/или другими проводными или беспроводными механизмами. Посредством одного или более таких механизмов связи компьютер 20 может передавать сообщения различным устройствам в транспортном средстве и/или принимать сообщения от различных устройств, например, контроллеров, приводов, датчиков и т.д., включая устройства 24 сбора данных и контроллеры 26. Альтернативно или дополнительно в случаях, когда компьютер 20 фактически содержит множество устройств, шина CAN или т.п. может быть использована для связи между устройствами, представленными в виде компьютера 20 в этом раскрытии. В дополнение компьютер 20 может быть выполнен с возможностью связи с другими устройствами посредством различных проводных и беспроводных сетевых технологий, например, сотовой связи, Bluetooth, универсальной последовательной шины (USB), проводных и/или беспроводных пакетных сетей и т.д.
Память компьютера 20 в общем хранит собранные данные. Собранные данные могут включать в себя множество данных, собираемых в основном транспортном средстве 14 устройствами 24 сбора данных и/или получаемых от них. Примеры собранных данных 24 могут включать в себя, например, данные об истории движения одного или более второстепенных транспортных средств 16, например, положение (например, географические координаты, расстояние от основного транспортного средства 14 и т.д.) второстепенного транспортного средства 16 как функцию от времени, скорость второстепенного транспортного средства 16 как функцию от времени, направление перемещения, количество и величина изменений направления и скорости в различные моменты времени и т.д. Собранные данные могут дополнительно включать в себя, например, информацию, такую как тип (например, грузовой автомобиль малой грузоподъемности, пассажирский автомобиль, минифургон и т.д.), размеры, изготовитель, модель и т.д. одного или более второстепенных транспортных средств 16. Собранные данные могут дополнительно включать в себя данные, вычисленные из данных, принимаемых от устройств 24 сбора данных в компьютере 20. В общем собранные данные могут включать в себя любые данные, которые могут быть собраны устройствами 24 сбора данных, приняты через связи между транспортными средствами (V2V) или между транспортным средством и инфраструктурой (V2I), собраны или приняты от других источников и/или вычислены из таких данных.
Компьютер 20 может быть запрограммирован с возможностью приема данных от устройств 24 сбора данных и данных, относящихся к целям, например, месту назначения, маршруту, времени прибытия и т.д., основного транспортного средства 14. На основании собранных данных, как описано ниже, компьютер 20 может определять дорожную среду 10, определять второстепенные транспортные средства 16, участвующие в дорожной среде 10, и определять стратегию 46 для основного транспортного средства 14.
Компьютер 20 может дополнительно быть запрограммирован с возможностью сбора данных, относящихся к целям основного транспортного средства 14, и других данных, связанных с основным транспортным средством 14, например, карт области, в которой работает транспортное средство 14. Например, компьютер 20 может принимать входные данные от пользователя посредством пользовательского интерфейса 22, указывающие место назначения пользователя, маршрут, который пользователь хотел бы использовать, стиль вождения (консервативный, спортивный) и т.д. Компьютер 20 может дополнительно включать в себя или принимать, например, карты области, например, от системы GPS или из памяти. На основании принимаемых данных компьютер 20 может выполнять так называемое «планирование движения», т.е. планирование пути до требуемого места назначения с точки зрения направлений движения на карте дорожной сети. Компьютер 20 может дополнительно быть запрограммирован с возможностью хранения этих данные в памяти для дальнейшего использования, например, для использования при определении стратегии 46 движения и/или при движении основного транспортного средства 14.
На основании данных о стратегии 46 и планировании движения компьютер 20 может определять и отправлять команды контроллерам 26 транспортного средства для управления транспортным средством 14 согласно стратегии 46 и запланированному движению.
В общем каждый контроллер 26 может включать в себя процессор, запрограммированный с возможностью приема инструкций от компьютера 20, выполнения инструкций и отправки сообщений компьютеру 20. Электронный блок управления (ECU), например, уже известный, и, кроме того, имеющий программирование для работы, как описано здесь, представляет собой пример контроллера 26. Дополнительно каждый из контроллеров 26 может включать в себя или быть соединен с возможностью сообщения с приводом или т.п., который обеспечен для приведения в действие компонента транспортного средства, например, тормоза, рулевого колеса, дросселя и т.д. Например, контроллер 26 тормоза может включать в себя процессор и насос для регулировки давления тормозной жидкости. В этом примере при приеме инструкции от компьютера 20 процессор может активировать насос для того, чтобы обеспечивать усиление или запускать операцию торможения.
Дополнительно каждый из контроллеров 26 может включать в себя датчики или иначе работает в качестве устройств 24 сбора данных для обеспечения данных компьютеру 20, относящихся к скорости транспортного средства, углу рулевого колеса транспортного средства, высоте подвески и т.д. Например, блок 26 управления тормозом может отправлять данные компьютеру 20, соответствующие давлению при торможении, прикладываемому контроллером 26 тормоза.
Устройства 24 сбора данных могут включать в себя множество устройств. Например, устройства 24 сбора данных могут включать в себя лидар, радиолокатор, видеокамеры, ультразвуковые датчики, инфракрасные датчики для считывания среды и, например, отслеживания второстепенных транспортных средств 16. Устройства 24 сбора данных могут дополнительно включать в себя компоненты, которые динамически собирают данные об основном транспортном средстве 14, такие как скорость, скорость рыскания, угол рулевого колеса и т.д. Дополнительно вышеупомянутые примеры не предназначены для ограничения. Другие типы устройств 24 сбора данных, например, акселерометры, гироскопы, датчики давления, термометры, барометры, высотомеры и т.д., могут быть использованы для обеспечения данных компьютеру 20.
Файл 25 определения дорожной сети (RNDF) может включать в себя зашифрованные топологические метрические карты дорожной сети, в которой может работать основное транспортное средство 14. Топологические метрические карты включают в себя координаты широты и долготы для дорожных элементов и других объектов в среде и зашифрованы на основании производного формата файла RNFD. RNDF 25 может подавать данные карты, например, компьютеру 20.
Основное транспортное средство 14 может дополнительно включать в себя пользовательский интерфейс 22, который может быть встроен или соединен с возможностью сообщения с компьютером 20. Пользовательский интерфейс 22 может быть использован, чтобы позволять пользователю отслеживать процедуру выбора стратегий 46 и/или вручную выбирать стратегии 46 для выполнения. Интерфейс 22 может включать в себя одно или более устройств вывода, таких как дисплей, динамики и т.д. для сообщения информации пользователю. Интерфейс 22 может дополнительно включать в себя одно или более устройств ввода, таких как дисплей с сенсорным экраном, клавиатура, устройство распознавания жестов, переключатели и т.д., для приема входных данных от пользователя.
Компьютер 20 может быть запрограммирован с возможностью хранения данных, относящихся к второстепенным транспортным средствам 16. Как описано выше, эти данные могут включать в себя данные, представляющие историю точек данных, например, положение второстепенного транспортного средства 16 как функцию от времени, скорость второстепенного транспортного средства 16 как функцию от времени, направление перемещения, количество и величину изменений направления и скорости в различные моменты времени и т.д. История может периодически отбираться, например, каждые 0,3 секунды, с максимально допустимым количеством моментов истории. Максимально допустимое количество моментов истории может составлять, например, 400, что может показывать предыдущие две минуты поведения при движении для каждого второстепенного транспортного средства 16. Максимально допустимое количество моментов истории может зависеть от типа рассматриваемой в настоящее время ситуации движения. Например, меньшее количество моментов истории может быть необходимо для парковочного маневра, чем для движения по автомобильной дороге.
Собранные данные, относящиеся к второстепенным транспортным средствам, могут дополнительно включать в себя, например, информацию о каждом из второстепенных транспортных средств 16, такую как тип, размеры, изготовитель, модель и т.д. Собранные данные могут дополнительно включать в себя данные, вычисленные из них в компьютере 20.
Компьютер 20 поддерживает и публикует карты стоимостей, которые указывают препятствия в среде, которые основному транспортному средству 14 следует избегать. Карты стоимостей дополнительно указывают «виртуальные» препятствия, т.е. области, в которые основному транспортному средство 14 не следует заезжать, такие как полосы встречного движения. Компьютер 20 генерирует карты стоимостей из этих препятствий и виртуальных препятствий и сохраняет карты стоимостей. Карты стоимостей могут быть использованы, например, для выбора стратегии 46 для управления основным транспортным средством 14. Карты стоимостей могут быть использованы для определения действий, принимаемых основным транспортным средством 46 для выполнения стратегии 46. Карты стоимостей могут дополнительно быть использованы для определения действий, принимаемых транспортным средством 14, независимо от стратегии 46, например, для выполнения маневров объезда препятствий.
Память компьютера 20 в общем дополнительно хранит стратегии 46. Каждая стратегия 46 выполнена с возможностью отражения различного высокоуровневого поведения и намерения и может включать в себя планируемую траекторию. Примерные стратегии могут включать в себя следование по полосе движения, изменение полосы движения или поворот на перекрестке. Стратегии 46 могут указывать одно или более действий, которые транспортное средство 14, 16 может принимать при поддержании стратегии. Например, для стратегии номинальной полосы движения (смотри ниже) транспортное средство 14, 16 может принимать действия для рулевого управления транспортным средством по направлению к центральной линии текущей полосы движения, по которой перемещается транспортное средство 14. Стратегии 46 могут дополнительно указывать одну или более реакций, которые транспортное средство 14, 16 может иметь по отношению к другому транспортному средству 14, 16. Например, транспортное средство 14, 16 может регулировать скорость транспортного средства 14, 16 для поддержания желаемых расстояний между другими транспортными средствами 14, 16 спереди и/или сзади транспортного средства 14, 16 на той же полосе движения. Неограничивающий список стратегий 46 включает в себя:
номинальная полоса движения: стандартная стратегия 46, при которой транспортное средство остается на заданной полосе движения и может выполнять простые повороты (такие как подъемы-спуски). Большой участок движения состоит из этого поведения. Поведение отслеживает центральную линию полос движения. Эта стратегия 46 применима, если основное транспортное средство 14 уже относительно близко к центральной линии полосы движения.
изменение полосы движения: транспортное средство 14 выполняет стандартное изменение полосы движения автомобильной дороги в любом направлении так, что оно переходит с одной центральной линии полосы движения на другую. Стратегия 46 переключается обратно на номинальную полосу движения, как только изменение полосы движения завершается. Стратегия 46 применима, если правила дорожного движения позволяют изменение полосы движения и отсутствуют препятствующие второстепенные транспортные средства 16. Она также может завершаться прерванным поведением, при котором после начала изменения полосы движения мы возвращаемся обратно на исходную полосу движения, это прерывание возникает, когда ранее незамеченное второстепенное транспортное средство 16 приближается к области, в которую пытается перейти основное транспортное средство 14.
возвращение на полосу движения: эта стратегия 46 выполнена с возможностью перемещения основного транспортного средства 14 из положения, которое находится не в центре полосы движения, и создания безопасного пути обратно к центру полосы движения так, что номинальная полоса движения может быть снова принята.
парковка: эта стратегия 46 выполняет парковочный маневр на автомобильной стоянке (обозначена как «зоны» в нашем представлении). Эта стратегия 46 может быть использована для выполнения парковочного маневра вперед и назад.
сквозная зона: в этой стратегии 46 транспортное средство пересекает зону к одному из ее выездов и далее переключается на номинальную полосу движения, как только достигнет полосы движения. Это стратегия 46, которая будет использоваться для выезда с парковочного места.
аварийная остановка: эта стратегия 46 вызывает безопасную остановку основного транспортного средства 14, в частности, если другие стратегии 46 приводят к плохим результатам.
изменение полосы движения «змейкой»: эта стратегия 46 подобна стандартной стратегии 46 изменения полосы движения, но выполняет перестраивание «змейкой», при котором имеется зазор между двумя второстепенными транспортными средствами 16.
перекресток: эта стратегия 46 управляет поведением на перекрестке, например, остановкой или поведением на знаке «уступи дорогу» или светофоре. Эта стратегия 46 может иметь различные варианты для различных уровней агрессивности, чтобы позволять выбор процесса принятия решений при въезде на перекресток.
обгон: эта стратегия 46 позволяет обгон одного второстепенного транспортного средства 16, по возможности включая движение по встречной дорожной полосе, когда разметка полосы движения это позволяет. В этом случае основное транспортное средство 14 въезжает на полосу обгона, ускоряется, опережая второстепенное транспортное средство 16, и затем въезжает обратно на исходную полосу движения и возвращается на номинальную полосу.
аккуратное движение: эта стратегия 46 представляет собой вариант стратегии номинальной полосы движения для использования при наличии препятствий, блокирующих путь, а также при выполнении дорожных работ или больших дорожных заграждений. В этом случае поведение использует планировщик локального пути для поиска маршрута в обход заграждений с целью достижения основной полосы движения в будущем. Это поведение осуществляется более медленно и аккуратно, чем стратегия номинальной полосы движения, и должна становиться активной только, когда номинальная полоса движения недоступна.
Приведенный выше список примерных стратегий 46 является неограничивающим. Различные стратегии 46 могут быть использованы в зависимости от конкретной ситуации движения, применяемых правил дорожного движения, культурных норм в стране, в которой движется основное транспортное средство 14, погодных условий и т.д.
ПРОЦЕССЫ
ОПРЕДЕЛЕНИЕ ВТОРОСТЕПЕННЫХ ТРАНСПОРТНЫХ СРЕДСТВ
Как рассмотрено выше, компьютер 20 может быть запрограммирован с возможностью определения дорожной среды 10, включающей в себя основное транспортное средство 14 и одно или более второстепенных транспортных средств 16 в пределах заданного расстояния от основного транспортного средства 14. Как рассмотрено выше, «в пределах заданного расстояния» может быть определено, например, в пределах первого фиксированного расстояние с левой и правой стороны, например, 20 метров, и второго фиксированного расстояния с передней и задней стороны, например, 100 метров. Дополнительно или альтернативно заданное расстояние может быть определено как функция от ситуации движения. Например, в пределах заданного расстояния может быть определено как в пределах относительно небольшой области, если основное транспортное средство 14 паркуется, и в пределах относительно большой области, если основное транспортное средство 14 перемещается по автомобильной дороге. Дополнительно заданное расстояние может быть определено, например, на основании скорости, с которой перемещается основное транспортное средство 14, стратегии 46, которую в настоящее время выполняет транспортное средство 14, и т.д.
Компьютер 20 может дополнительно принимать данные карты, описывающие область, в которой в настоящее время движется основное транспортное средство 14. Компьютер 20 может определять дорожную среду 10, как включающую в себя данные карты, основное транспортное средство 14 и одно или более второстепенных транспортных средств 16. Дорожная среда 10 может дополнительно включает в себя, например, объекты, расположенные в пределах области движения основного транспортного средства 14, погодные условия, светофоры и т.д., которые могут оказывать влияние на поведение основного транспортного средства 14 и второстепенных транспортных средств 16.
После определения участников (основного транспортного средства 14 и второстепенных транспортных средств 16) в дорожной среде 10 компьютер 20 может анализировать поведение каждого второстепенного транспортного средства 16 в дорожной среде 10 и прогнозировать будущее поведение, как описано ниже.
АНАЛИЗ И ПРОГНОЗ ПОВЕДЕНИЯ ПОСРЕДСТВОМ ОБНАРУЖЕНИЯ ТОЧЕК ИЗМЕНЕНИЯ
После определения одного или более второстепенных транспортных средств 16 в дорожной среде 10 компьютер 20 может быть запрограммирован с возможностью сбора данных, относящихся к поведению при движении второстепенных транспортных средств 16 в предыдущий период времени. Предыдущий период времени может представлять собой, например, заданный период времени, например, две минуты, до текущего времени. Данные, собранные для каждого из второстепенных транспортных средств 16, могут включать в себя, например, положение как функцию от времени, скорость как функцию от времени и т.д., как описано выше. Данные также могут включать в себя информацию о второстепенном транспортном средстве 16, такую как тип, модель, размер и т.д. Еще дополнительно данные могут включать в себя информацию, такую как число, личность и т.д. водителя и/или пассажиров второстепенного транспортного средства 16.
Компьютер 20 может быть запрограммирован на основании собранных данных с возможностью анализа поведения при движении одного или более второстепенных транспортных средств 16 в предыдущий период времени. Как показано на фигуре 3, второстепенное транспортное средство 16 может перемещаться по пути 50 по автомобильной дороге 12, включающей в себя первую, вторую и третью полосы 60a, 60b, 60c движения. Компьютер 20 может определять один или более сегментов 52 по пути 50. Точки 54 изменения, которые отмечают переход из одного сегмента 52 в другой сегмент 52, могут быть определены компьютером 20.
Каждый сегмент 52 может быть связан со стратегией 46, которая представляет собой хорошее соответствие наблюдаемому поведению в сегменте 52. Согласно примерному пути 50, показанному на Фигуре 3, первый сегмент 52a, третий сегмент 52c и пятый сегмент 52e могут быть связаны со стратегией 46 номинальной полосы движения. Второй сегмент 52b может быть связан со стратегией 46 изменения полосы движения на правую, а четвертый сегмент 52d может быть связан со стратегией 46 изменения полосы движения на левую. Точки 54 изменения могут быть определены маркировкой времени (и положения вдоль пути 50), в которое вероятно происходит изменение основной стратегии 46, управляющей поведением второстепенного транспортного средства 16.
На основании точек 54 изменения определенных сегментов 52 и вероятных стратегий 46, связанных с каждым из сегментов 52, компьютер 20 может быть запрограммирован с возможностью вычисления правдоподобия всех доступных стратегий 46 для целевого транспортного средства с учетом наблюдений в самом последнем сегменте, отражая распределения p(πtv|xt,z0:t)по возможным стратегиям 46 транспортного средства в текущем временном такте. Дополнительно на основании полной сегментации истории компьютер 20 может быть запрограммирован с возможностью обнаружения аномального поведения, которое не объясняется доступным множеством стратегий 46.
ОБНАРУЖЕНИЕ ТОЧЕК ИЗМЕНЕНИЯ
Известный алгоритм, называемый обнаружение точек изменения с использованием аппроксимированных параметров (CHAMP), рассмотренный ниже, может быть использован для сегментации истории наблюдаемых состояний целевого второстепенного транспортного средства 16.
Учитывая множество доступных стратегий 46 Π и временные ряды наблюдаемых состояний данного транспортного средства z1:n=(z1,z2,...,zn), CHAMP выводит максимум апостериорного (MAP) множества моментов времени τ1,τ2,...,τm, в которые возникают точки 54 изменений между стратегиями, получая m+1 сегментов 52. Таким образом, iый сегмент 52 состоит из наблюдений


Точки 54 изменений моделируется в виде цепи Маркова, где переходные вероятности представляют собой функцию от времени с последней точки 52 изменения:
где g(·) представляет собой функцию плотности вероятности (pdf) по времени, а G(·) обозначает интегральную функцию распределения (cdf).
Учитывая сегменты 52 от времени s до t и стратегию 46


где


Распределение Ct по положению первой точки 54 изменения до времени t может быть эффективно оценено с использованием стандартной байесовской фильтрации и онлайн алгоритма Витерби. Определение:


где



В любой момент времени наиболее вероятная последовательность скрытых стратегий 46 (называемая путь Витерби), которая приводит к последовательности наблюдений, может быть выделена путем нахождения (j,q), которые максимизируют


ПРОГНОЗИРОВАНИЕ ПОВЕДЕНИЯ
Как описано ниже, компьютер 20 может дополнительно быть запрограммирован с возможностью вычисления вероятности каждой скрытой стратегии 46 путем использования обнаружения точек изменения в истории наблюдаемых состояний транспортного средства.
Рассмотрим (m+1)ый сегмент (самый последний), полученный посредством обнаружения точек 52 изменения и содержащий наблюдения



Конкретно, мы принимаем, что



где σ представляет собой мешающий параметр, отражающий ошибку моделирования, а I представляет собой подходящую идентичность. То есть, Уравнение 15 по существу измеряет отклонение наблюдаемых состояний от заданных данной стратегией 46. Правдоподобия стратегий, полученные из Уравнения 14, отражают распределение вероятности по возможным стратегиям 46, которые могут выполняться наблюдаемым второстепенным транспортным средством 16 в текущем временном такте, которое может быть представлено с использованием дельта-функций в виде смешенного распределения:

где αi представляет собой гипотезу по стратегии 46 πi, а η представляет собой нормирующую постоянную. В связи с этим аппроксимированное апостериорное распределение из Уравнения 7 может быть вычислено путем выборки из этого распределения для каждого второстепенного транспортного средства 16, получая выборки высокого правдоподобия из связанных взаимодействий.
ОБНАРУЖЕНИЕ АНОМАЛЬНОГО ПОВЕДЕНИЯ
Аномальное поведение второстепенного транспортного средства 16, не смоделированное доступными стратегиями 46, может быть обнаружено на основании сегментации временных рядов, полученной путем обнаружения точек изменения. Свойства аномального поведения могут быть определены с точки зрения правдоподобия стратегий. Наблюдаемые данные далее могут сравниваться с обозначенными нормальными образцами в ранее записанных траекториях транспортного средства. Следующие два критерия могут быть определены для аномального поведения:
1. Неправдоподобие в отношении доступных стратегий 46. Аномальное поведение маловероятно может быть объяснено любой из доступных стратегий 46, так как они направлены на соблюдение дорожных правил и обеспечение плавной езды. В связи с этим поведения подобные движению в неверном направлении или пересечению сплошной линии на автомобильной дороге не будут отражаться доступными стратегиями 46. Таким образом, мы измерили среднее правдоподобие среди всех сегментов 52 в истории транспортного средства в виде глобального подобия наблюдаемой истории всех доступных стратегий 46:

где

2. Неоднозначность стратегий 46. Сегментация истории, которая часто колеблется среди различных стратегий 46, может быть признаком неоднозначности сегментации. Для формального выражения этого критерия мы сначала построим гистограмму, отражающую появления каждой стратегии 46 в сегментированной истории транспортного средства. Гистограмма с широким разбросом указывает на частые колебания, тогда как гистограмма с одной модой более вероятно соответствует нормальному поведению. Мы измерили эту характеристику как эксцесс гистограммы,


Используя эти критерии, мы определяем следующую меру нормальности, учитывая выбор MAP точек 54 изменений транспортного средства:
Эта мера нормальности истории целевого транспортного средства далее может сравниваться с мерой нормальности из множества ранее записанных траекторий других второстепенных транспортных средств 16. Далее мы определяем критерий нормальности для текущей истории транспортного средства в виде N<0,5γ, где γ представляет собой минимальную меру нормальности, оцененную в предшествующих временных рядах.
ПРИНЯТИЕ РЕШЕНИЙ С МНОЖЕСТВОМ СТРАТЕГИЙ
На основании общего процесса принятия решений, аппроксимаций в отношении подхода с множеством стратегий и процесса прогнозирования поведения, рассмотренных выше, процесс может быть выполнен и осуществлен для выбора стратегии 46 для управления поведением основного транспортного средства 14 в текущем временном такте.
Процесс начинается с составления множества выборок s ∈ S из распределения по стратегиям 46 второстепенных транспортных средств 16 с помощью Уравнения 16, где каждая выборка присваивает стратегию 46 πv ∈ Π каждому соседнему второстепенному транспортному средству 16 v. Для каждой стратегии 46 π доступной для основного транспортного средства 14 и для каждой выборки s компьютер 20 внедряет вперед во времени до горизонта H принятия решений основные и второстепенные транспортные средства 14, 16 в соответствии с присвоенными стратегиями (π,s) с использованием замкнутого моделирования для получения множества Ψ смоделированных траекторий ψ. Вознаграждение rπ,s оценивается для каждого внедрения Ψ, и, наконец, стратегия 46 π∗ выбирается для максимизации ожидаемого вознаграждения. Процесс непрерывно повторяется как удаляющийся горизонт. Отметим, что стратегии 46, которые не применяются с учетом текущего состояния x0, такие как стратегия 46 управления на перекрестке при движении по автомобильной дороге, не рассматриваются для выбора. Примерный процесс выбора стратегии 46 для управления основным транспортным средством 14 представлен более подробно в разделе «Блок-схема примерного процесса» ниже.
СТРАТЕГИИ
Как описано выше, каждая стратегия 46 выполнена с возможностью отражения различного высокоуровневого поведения и намерения и может включать в себя планируемую траекторию. Стратегии 46 могут включать в себя, например, следование по полосе движения, изменение полосы движения или поворот на перекрестке. Стратегии 46 доступные для конкретного основного транспортного средства 14 и/или второстепенного транспортного средства 16 могут зависеть от настройки для дорожной среды 10, т.е. на автомобильной дороге, на перекрестке, на автомобильной стоянке и т.д.
ВЫБОРОЧНОЕ ВНЕДРЕНИЕ ПОСРЕДСТВОМ ПРЯМОГО МОДЕЛИРОВАНИЯ
Хотя возможно выполнение высокоточных моделирований для внедрения назначений выборочных стратегий 46, моделирование с более низкой точностью может отражать необходимые взаимодействия между транспортными средствами 14, 16, чтобы выполнять целесообразные выборы поведения основного транспортного средства 14, при этом обеспечивая более высокую производительность. На практике используется упрощенная модель для каждого транспортного средства 14, 16, которая предполагает контроллер идеализированного рулевого управления. Однако это упрощение, тем не менее, точно описывает высокоуровневое поведение взаимодействий между транспортными средствами 14, 16. Транспортные средства 14, 16, классифицированные как аномальные, могут быть смоделированы с использованием одной стратегии 46 с учетом только их текущего состояния и карты среды, так как они не могут быть смоделированы множеством поведений в нашей системе.
ФУНКЦИЯ ВОЗНАГРАЖДЕНИЯ
Функция вознаграждения для оценки результата внедрения Ψ, включающая все второстепенные и основные транспортные средства 14, 16, представляет собой взвешенную комбинацию показателей mq(·)∈ M, с весами wq, которые выражают пользовательскую важность. Типичные показатели включают в себя (оставшееся) расстояние до цели в конце горизонта оценки для оценки прогресса, достигнутого в направлении места назначения, минимальное расстояние до препятствий для оценки безопасности, смещение выбора полосы движения, чтобы добавить предпочтение для правой полосы движения, и максимальную скорость рыскания и продольный рывок для измерения комфорта пассажиров. Для полного назначения (π,s) стратегии 46 с внедрением Ψπ,sмы вычисляем вознаграждение rπ,sвнедрения в виде взвешенной суммы

Каждое вознаграждение rπ стратегии 46 для основного транспортного средства 14 оценивается как ожидаемое вознаграждение по всем вознаграждениям rπ,sвнедрений, вычисленное как

Неограничивающий список параметров, которые могут рассматриваться для выборочного внедрения (прямое моделирование) включает в себя:
интеграл карты стоимости: Учитывая карту стоимости препятствий в среде (и непосредственно наблюдаемые, и «виртуальные препятствия», указывающую области, которые основному транспортному средству 14 следует избегать, такие как встречное дорожное движение), стоимость для этого параметра представляет собой линейный интеграл по карте стоимости. Эта стоимость становится больше, когда основное транспортное средство 14 приближается к препятствиям, и ее минимизация должна повышать безопасность. Например, интеграл карты стоимости для моделируемого результата может быть больше для ситуации, при которой транспортное средство перемещается ближе к встречному движению, например, слишком далеко влево на левой полосе движения, и меньше, когда транспортное средство находится дальше от встречного движения, например, более отцентрировано на полосе движения.
расстояние ближе к цели: Этот показатель вычисляет расстояние до цели в начале, и в конце моделируемого внедрения основного транспортного средства (d_начало и d_конец, соответственно), где конечный показатель представляет собой d_конец - d_начало. Он измеряет прогресс по направлению к месту назначения, где стратегия, максимизирующая этот показатель, перемещает основное транспортное средство 14 ближе к цели. Расстояние ближе к цели может быть измерено, например, в километрах. Результаты моделирования могут быть нормированы по диапазону результатов множества моделирований сценария.
ошибка бокового отклонения: Этот показатель представляет собой функцию ошибок для следования по полосе движения и представляет собой латеральное расстояние до центральной линии полосы движения. Стоимость для полного внедрения может быть выражена с использованием максимальной или средней ошибки в горизонте моделирования для регулировки чувствительности к моментальным большим отклонениям (например, при выполнении изменения полосы движения). Ошибка бокового отклонения может быть измерена, например, в метрах, и нормирована по диапазону результатов множества моделирований сценария.
скорость рыскания: Этот показатель представляет собой просто скорость рыскания основного транспортного средства 14, сформулированный либо как максимальное значение, либо как среднее значение по интервалу моделирования, где минимизация этой стоимости приводит к более ровным более прямым траекториям, которые вероятно являются более комфортными. Скорость рыскания может быть измерена в единицах радианы на секунду и нормирована по диапазону результатов множества моделирований сценария.
продольной рывок: Этот показатель измеряет рывок при продольном управлении (торможение, дроссель) и может быть представлять собой либо среднее значение, либо максимальное значение по горизонту моделирования. Это, главным образом, показатель комфорта водителя. Продольный рывок может быть измерен в единицах метры/(секунда)2 и может быть нормирован по диапазону результатов множества моделирований сценария.
целевое смещение полосы движения: Включает стоимость основного транспортного средства 14, находящегося на конкретной полосе движения, где стоимость увеличивается, если основное транспортное средство 14 находится на полосе движения, которая находится на менее прямом пути до цели (например, далеко от левых полос движения на автомобильной дороге перед выполнением поворота). Эта функция стоимости аккумулирует стоимость для каждого временного такта, проведенного на полосе движения, так, что нахождение на плохой полосе движения и выбор изменения полосы движения стоит меньше, чем просто оставаться на полосе движения. Целевое смещение полосы движения может быть измерено в единицах полоса движения-секунды, и может отражать сколько полос движения прошло основное транспортное средство 14 от полосы движения прямо на пути до цели, и сколько основное транспортное средство 14 находится на полосе движения, отличной от полосы движения прямо на пути до цели. Результаты моделирования целевого смещения полосы движения могут быть нормированы по диапазону результатов множества моделирований сценария.
смещение полосы движения по умолчанию: Подобно описанному выше, но применяет смещение для выбора конкретной полосы движения для нормального перемещения, когда рядом нет точек принятия решений о навигации (например, с большим расстоянием для перемещения по автомобильной дороге до съезда с нее). Обычно это смещение полосы движения заключается в сохранении самой правой полосы движения. Смещение полосы движения по умолчанию может быть измерено в единицах полоса движения-секунды и может отражать сколько полос движения прошло основное транспортное средство 14 от выбранной полосы движения для нормального перемещения, и сколько основное транспортное средство 14 находится на полосе движения, отличной от выбранной полосы движения для нормального перемещения. Результаты моделирования смещения полосы движения по умолчанию могут быть нормированы по диапазону результатов множества моделирований сценария.
реакции других транспортных средств: Эта функция стоимости представляет собой штраф на поведения основного транспортного средства для резких реакций, которые имеют второстепенные транспортные средства 16, например, если стратегия 46 основного транспортного средства осуществляется перед второстепенным транспортным средством 16 и требует выполнения второстепенным транспортным средством 16 резкой остановки, чтобы избежать столкновения, эта стоимость будет высокой. Минимизация этой стоимости повышает безопасность, исключая зависимость от рефлексов других водителей. Отметим, что, так как выбор стратегии 46 основан на изменении между стратегиями 46 основного транспортного средства, а не на абсолютных метрических оценках, эта функция стоимости может быть нормирована, если все стратегии 46 приводят к резким реакциям, или если второстепенные транспортные средства 16 реагируют на что-либо, отличное от действий основного транспортного средства 14.
Для объединения множества показателей, вычисляемых для каждого внедрения для нахождения оценки для каждого выбора стратегии, метрические результаты могут быть преобразованы в нормированные безразмерные значения, веса могут быть определены для каждого показателя, и взвешенная сумма показателей может быть вычислена для каждого выборочного результата. Метрические оценки сами по себе имеют широко варьируемые единицы между ними, таким образом, чтобы сделать их сравнимыми, они могут быть нормированы с использованием диапазона метрических результатов (например, с тремя стратегиями 46, которые перемещают основное транспортное средство 14 соответственно на 10, 20 и 30 метров ближе к цели соответственно, результаты могут быть нормированы по диапазону, который представляет собой 20 метров, до значений, изменяющихся в диапазоне от 0 до 1, получая нормированные метрические оценки 0,0, 0,5 и 1,0 соответственно).
Для исключения чрезмерного реагирования на небольшие вариации (например, две стратегии 46 перемещают основное транспортное средство 14 на 10,0 и 10,1 метров ближе к цели, так как они делают почти то же самое) могут быть вычислены веса, которые устанавливаются на ноль, когда диапазон по одному показателю является слишком малым, чтобы быть информативным. Конечные веса для каждого показателя либо равны нулю для неинформативных показателей, либо представляют собой заданные веса, выбранные конструктором. Конечное вознаграждение для каждого выборочного внедрения представляет собой взвешенную сумму всех показателей.
Для вычисления оценки для каждого доступного варианта стратегии (когда имеется множество выборочных результатов для каждого выбора), взвешенная сумма вознаграждений может быть вычислена для каждой выборки, связанной с выбором конкретной стратегии, с весами, заданными вероятностью каждой выборки. Таким образом, стратегия 46 может быть выбрана с наибольшим ожидаемым вознаграждением.
БЛОК СХЕМА ПРИМЕРНОГО ПРОЦЕССА
Фигура 4 представляет собой блок-схему примерного процесса для управления транспортным средством, использующим систему принятия решений с множеством стратегий. Процесс 400 начинается в блоке 405.
В блоке 405 компьютер 20 основного транспортного средства 14 принимает данные, представляющие текущую среду, в которой в настоящее время работает основное транспортное средство 14. Например, компьютер 20 может принимать (или извлекать) данные карты, описывающие текущую дорожную сеть, на которой работает основное транспортное средство 14. Компьютер 20 может дополнительно принимать данные, относящиеся к одному или более второстепенным транспортным средствам 16, перемещающимся в пределах заданного расстояния от основного транспортного средства 14. Данные могут включать в себя текущее положение каждого второстепенного транспортного средства 16 и другие данные, такие как скорость, направление перемещения и т.д., как описано выше. Дополнительно компьютер 20 может принимать данные о других объектах в пределах заданного расстояния от основного транспортного средства 14, сигналы светофоров, погодные условия и т.д. При приеме данных, описывающих текущую среду, процесс 400 продолжается в блоке 410.
В блоке 410 компьютер 20 определяет дорожную среду 10, включающую в себя основное транспортное средство 14 и одно или более второстепенных транспортных средств 16 в пределах заданного расстояния от основного транспортного средства 14, как описано выше. Дорожная среда 10 может быть определена для включения других элементов в среде, т.е. дорожной карты, объектов и т.д., которые могут влиять на выбор стратегии движения основного транспортного средства 14. Процесс 400 продолжается в блоке 415.
В блоке 415 компьютер 20 собирает данные о поведении, представляющие поведение каждого из второстепенных транспортных средств 16 в недавнем прошлом. Как описано выше данные о поведении могут включать в себя положение второстепенного транспортного средства 16 как функцию от времени, скорость второстепенного транспортного средства 16 как функцию от времени, направление перемещения, количество и величину изменений направления и скорости в различные моменты времени и т.д.
Дополнительно, как описано выше, история поведения при движении может быть отбираться, например, каждые 0,3 секунды, с максимально допустимым количеством моментов истории. Максимально допустимое количество моментов истории может составлять, например, 400, что может показывать предыдущие две минуты поведения при движении для каждого второстепенного транспортного средства 16. Максимально допустимое количество моментов истории может зависеть от типа рассматриваемой в настоящее время ситуации движения. Например, меньшее количество моментов истории может быть необходимо для парковочного маневра, чем для движения по автомобильной дороге. После сбора компьютером 20 данных о поведении процесс 400 продолжается в блоке 420.
В блоке 420, как описано подробно выше, компьютер 20 анализирует прошлое поведение второстепенных транспортных средств 16 с использованием байесовского анализа точек изменения. На основании анализа точек изменения компьютер 20 определяет распределение вероятных стратегий 46 для каждого из второстепенных транспортных средств 16 в текущем временном такте. Далее компьютер 20 определяет одну или более стратегий 46, которые могут быть использованы для управления основным транспортным средством 14. Процесс 400 продолжается в блоке 425.
В блоке 425 компьютер 20 выполняет одно или более прямых моделирований дорожной среды 10. Компьютер 20 выбирает выборки высокого правдоподобия из распределения вероятных стратегий 46 для каждого из второстепенных транспортных средств 16, а также из одной или более стратегий 46 для основного транспортного средства 14. Множество моделирований выполняются на основании различных множеств выбранных стратегий 46 для второстепенных транспортных средств 16 и основных транспортных средств 14. Далее процесс 400 продолжается в блоке 430.
В блоке 430 компьютер 20 оценивает результаты множества моделирований на основании множества вознаграждений, установленных для дорожной среды 10. Компьютер 20 выбирает стратегию 46 для управления основным транспортным средством 46 для того, чтобы максимизировать вознаграждения для дорожной среды 10, как описано выше. Процесс 400 продолжается в блоке 435.
В блоке 435 компьютер 20 отправляет выбранную стратегию 46 в блок управления 34 транспортного средства. Блок управления 34 транспортного средства по меньшей мере частично на основании стратегии 46 отдает команды одному или более контроллерам 26 для управления поведением при движении транспортного средства 14. Процесс 400 продолжается в блоке 440.
В блоке 440 компьютер 20 определяет, следует ли продолжать процесс 400. Например, если основное транспортное средство 14 продолжает перемещаться, процесс 400 может возвращаться в блок 405 и повторно оценивать определение дорожной среды 10. Если, с другой стороны, зажигание основного транспортного средства 14 выключено, транспортное средство 14 прекратило перемещение (припарковано), или, если произошло дорожное событие, такое как столкновение, компьютер 20 может определять, что процесс 400 следует завершить.
ЗАКЛЮЧЕНИЕ
В данном контексте, наречие «по существу» означает, что форма, конструкция, измерение, количество, время и так далее могут отклоняться от точно описанной геометрии, расстояния, измерения, количества, времени и т.д., вследствие недостатков материалов, обработки, изготовления и т.д.
Выражение «примерный» используется в смысле обозначения примера, например, ссылку на «примерное приспособление» следует читать, как просто ссылку на пример приспособления.
Каждое из вычислительных устройств, например, рассмотренных здесь, в общем включает в себя инструкции, исполняемые одним или более вычислительными устройствами, например, указанными выше, для выполнения блоков или этапов процессов, описанных выше. Например, рассмотренные выше блоки процесса могут быть осуществлены как исполняемые компьютером инструкции.
Исполняемые компьютером инструкции могут быть скомпилированы или интерпретированы из компьютерных программ, созданных с использованием множества языков и/или технологий программирования, включая, без ограничения и либо отдельно, либо в сочетании Java™, C, C++, Visual Basic, Java Script, Perl, HTML и т.д. В общем процессор (например, микропроцессор) принимает инструкции, например, из памяти, машиночитаемого носителя и т.д., и исполняет эти инструкции, тем самым выполняя один или более процессов, включая один или более описанных здесь процессов. Такие инструкции и другие данные могут храниться и передаваться с использованием множества машиночитаемых носителей. Файл в вычислительном устройстве в общем представляет собой совокупность данных, хранящихся на машиночитаемом носителе, например, носителе данных, оперативном запоминающем устройстве и т.д.
Машиночитаемый носитель включает в себя любой носитель, который участвует в обеспечении данных (например, инструкций), которые могут быть считаны компьютером. Такой носитель может принимать многие формы, включая, но не ограничиваясь, энергонезависимый носитель, энергозависимый носитель и т.д. Энергонезависимый носитель включает в себя, например, оптический или магнитный диски и другую постоянную память. Энергозависимый носитель включает в себя динамическое оперативное запоминающее устройство (DRAM), которое обычно представляет собой оперативную память. Общие формы машиночитаемого носителя включают в себя, например, флоппи-диск, гибкий диск, жесткий диск, магнитную ленту любой другой магнитный носитель, CD-ROM, DVD, любой другой оптический носитель, перфорационные карты, бумажные ленты, любой другой физический носитель с рисунками отверстий, RAM, PROM, EPROM, FLASH-EEPROM, любой другой чип или картридж памяти или любой другой носитель, который компьютер может считывать.
На чертежах, одинаковые ссылочные позиции обозначают одинаковые элементы. Дополнительно некоторые или все из этих элементов могут быть изменены. В отношении носителя, процессов, систем, способов и т.д., описанных здесь, следует понимать, что, хотя этапы таких процессов и т.д. описаны как происходящие согласно определенной упорядоченной последовательности, такие процессы могут быть осуществлены с описанными этапами, выполняемыми в порядке, отличном от порядка, описанного здесь. Дополнительно следует понимать, что определенные этапы могут быть выполнены одновременно, что другие этапы могут быть добавлены, или, что описанные здесь определенные этапы могут быть опущены. Другими словами, описания процессов здесь обеспечены в целях иллюстрации конкретных вариантов выполнения, и не должны никоим образом толковаться так, чтобы ограничивать заявленное изобретение.
Соответственно следует понимать, что приведенное выше описание предназначено для иллюстрации, а не ограничения. Многие варианты выполнения и применения, отличные от обеспеченных примеров, будут понятны специалисту в области техники при прочтении приведенного выше описания. Объем охраны изобретения должен быть определен не со ссылкой на приведенное выше описание, а со ссылкой на приложенную формулу изобретения вместе с полным объемом охраны эквивалентов, на которые такая формула изобретения имеет право. Ожидается и предполагается, что будущие разработки будут возникать в рассмотренном здесь уровне техники, и что раскрытые системы и способы будут включены в такие будущие варианты выполнения. В итоге, следует понимать, что изобретение может быть преобразовано и изменено и ограничено только следующей далее формулой изобретения.
Все выражения, используемые в формуле изобретения, предназначены для приведения их общепринятых и обычных значений, которые понятны специалисту в области техники, кроме тех случаев, когда здесь явно указано обратное. В частности, использование выражения «указанный» следует читать как перечисление одного или более указанных элементов, кроме тех случаев, когда пункт формулы изобретения отмечает явно обратный случай.
Реферат
Группа изобретений относится к системе и способу определения траектории для транспортного средства. Группа изобретений работает следующим образом. Определяют из первого транспортного средства второстепенные транспортные средства в пределах заданного расстояния от первого транспортного средства. Принимают данные о работе каждого из второстепенных транспортных средств. Определяют, на основании данных для каждого из второстепенных транспортных средств, распределение вероятностей каждой из множества возможных планируемых траекторий. Определяют планируемую траекторию для первого транспортного средства на основании распределений вероятностей каждой из множества возможных планируемых траекторий для каждого из второстепенных транспортных средств. Обеспечивается определение планируемой траектории для основного транспортного средства на основании второстепенных транспортных средств. 2 н. и 18 з.п. ф-лы, 4 ил.
Комментарии