Способ управления движением и устройство управления движением для транспортного средства - RU2768687C1
Код документа: RU2768687C1
Чертежи






















Описание
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу управления движением и устройству управления движением для транспортного средства, которые включают в себя управление изменением полосы движения, управление движением при правом повороте или управление движением при левом повороте, управление движением при выезде с главной дороги или управление движением для въезда на главную дорогу и т.п.
Уровень техники
[0002]Известно устройство помощи при вождении для побуждения водителя самостоятельно подтвердить безопасность при управлении транспортным средством для автономной смены полосы движения (Патентный документ 1). Если определено, что смена полосы движения возможна, это устройство определяет, выполнил ли водитель действие подтверждения безопасности смены полосы движения, на основании ориентации лица или направления глаз, обнаруженных посредством формирования изображений головы водителя, и автономно выполняет смену полосы движения на основании определенных результатов.
[Документ из уровня техники]
[Патентный документ]
[0003] [Патентный документ 1] WO2017/094316
[Раскрытие изобретения]
[Проблемы, решаемые изобретением]
[0004] Однако в уровне техники трудно определить, действительно ли водитель контролирует автономную систему управления движением, поскольку в нём определяется, было ли выполнено действие подтверждения безопасности, лишь по заданному однозначному действию водителя.
[0005] Задача, решаемая настоящим изобретением, состоит в создании способа управления движением и устройства управления движением для транспортного средства, которое позволяет водителю контролировать работу транспортного средства при выполнении автономного управления движением транспортного средства.
[Средства для решения проблемы]
[0006] Настоящее изобретение решает указанную выше проблему путем установления формы ввода для ввода согласия от водителя, который выполняется во время движения транспортного средства, в форму ввода, отличную от формы ввода для предыдущего ввода согласия, при выполнении автономного управления движением для транспортного средства.
[Эффект изобретения]
[0007] В соответствии с настоящим изобретением водитель будет осведомлён или будет обращать внимание на измененную форму ввода, потому что каждый раз, когда выполняется автономное управление движением, форма ввода для ввода согласия от водителя изменяется. Это позволяет водителю контролировать работу транспортного средства.
[Краткое описание чертежей]
[0008] Фиг. 1 - блок-схема, показывающая вариант осуществления устройства управления движением для транспортного средства согласно настоящему изобретению.
Фиг. 2 - схема, иллюстрирующая пример таблицы, используемой для определения ситуации движения.
Фиг. 3 - вид сверху, иллюстрирующий ситуацию смен полосы движения согласно одному или более вариантам осуществления настоящего изобретения.
Фиг. 4A - набор схем, иллюстрирующих первую форму представления информации о смене полосы движения, представляемую во время выполнения управления сменой полосы движения согласно одному или более вариантам осуществления настоящего изобретения.
Фиг. 4B - набор схем, иллюстрирующих вторую форму представления информации о смене полосы движения, представляемую во время выполнения управления сменой полосы движения согласно одному или более вариантам осуществления настоящего изобретения.
Фиг. 4С - набор схем, иллюстрирующих третью форму представления информации о смене полосы движения, представляемую во время выполнения управления сменой полосы движения согласно одному или более вариантам осуществления настоящего изобретения.
Фиг. 4D - набор схем, иллюстрирующих четвертую форму представления информации о смене полосы движения, представляемую во время выполнения последующего управления сменой полосы движения согласно одному или более вариантам осуществления настоящего изобретения.
Фиг. 4E - набор схем, иллюстрирующих пятую форму представления информации о смене полосы движения, представляемую во время выполнения последующего управления сменой полосы движения согласно одному или более вариантам осуществления настоящего изобретения.
Фиг. 5A - блок-схема (часть 1), иллюстрирующая процесс управления сменой полосы движения, выполняемый устройством управления движением для транспортного средства согласно настоящему изобретению.
Фиг. 5B - блок-схема (часть 2), иллюстрирующая процесс управления сменой полосы движения, выполняемый устройством управления движением для транспортного средства согласно настоящему изобретению.
Фиг. 5C - блок-схема (часть 3), иллюстрирующая процесс управления сменой полосы движения, выполняемый устройством управления движением для транспортного средства согласно настоящему изобретению.
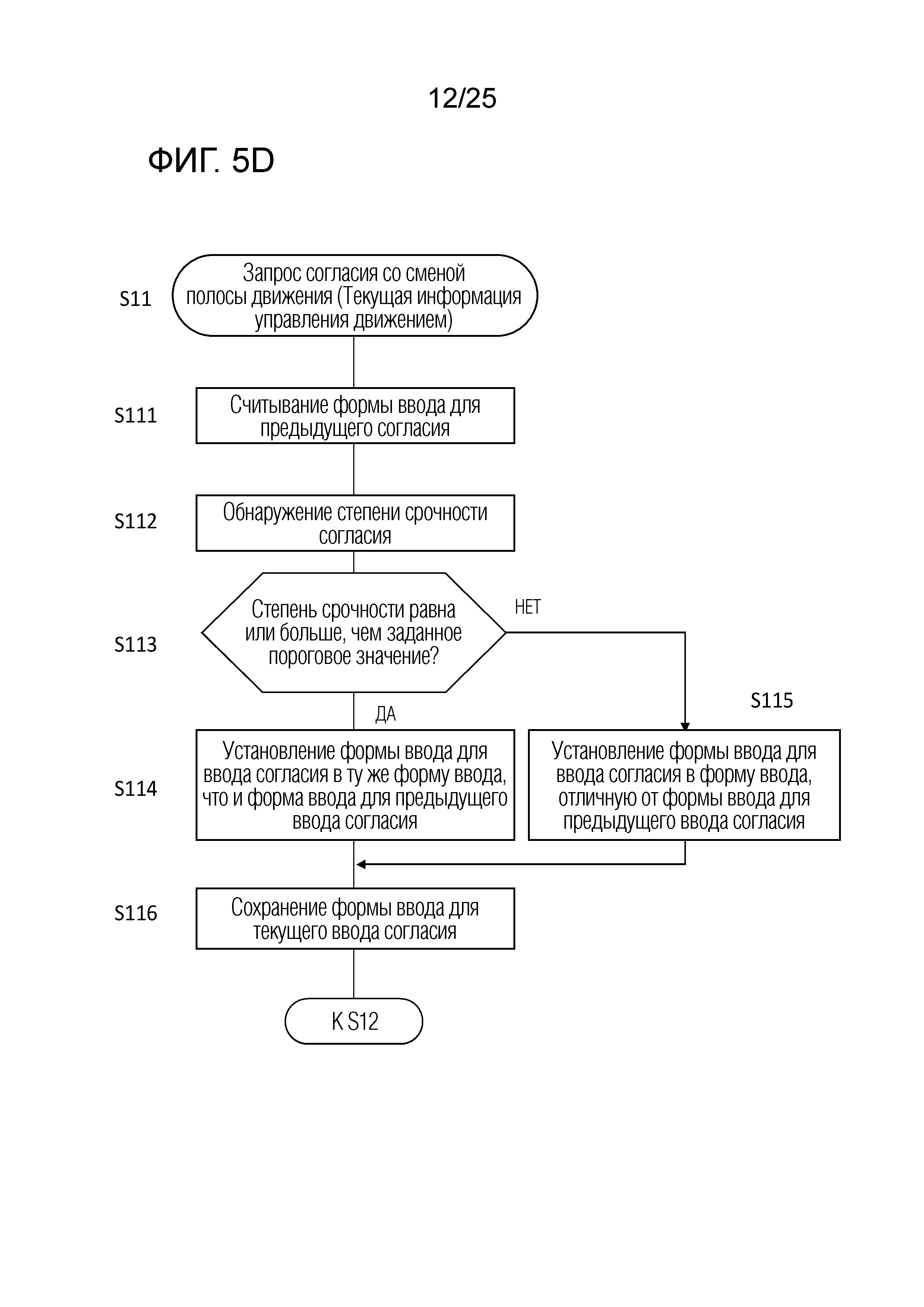
Фиг. 5D - блок-схема (часть 4), иллюстрирующая процесс управления сменой полосы движения, выполняемый устройством управления движением для транспортного средства согласно настоящему изобретению.
Фиг. 5E - блок-схема (часть 5), иллюстрирующая процесс управления сменой полосы движения, выполняемый устройством управления движением для транспортного средства согласно настоящему изобретению.
Фиг. 6A - вид в плане (часть 1) для описания способа обнаружения расстояний до объектов, выполняемого устройством управления движением для транспортного средства согласно настоящему изобретению.
Фиг. 6B - вид в плане (часть 2) для описания способа обнаружения расстояний до объектов, выполняемого устройством управления движением для транспортного средства согласно настоящему изобретению.
Фиг. 6С - вид в плане (часть 3) для описания способа обнаружения расстояний до объектов, выполняемого устройством управления движением для транспортного средства согласно настоящему изобретению.
Фиг. 6D - вид в плане (часть 4) для описания способа обнаружения расстояний до объектов, выполняемого устройством управления движением для транспортного средства согласно настоящему изобретению.
Фиг. 6E - вид в плане (часть 5) для описания способа обнаружения расстояний до объектов, выполняемого устройством управления движением для транспортного средства согласно настоящему изобретению.
Фиг. 6F - вид в плане (часть 6) для описания способа обнаружения расстояний до объектов, выполняемого устройством управления движением для транспортного средства согласно настоящему изобретению.
Фиг. 7 - вид в плане для описания способа установления целевого положения для смены полосы движения, при этом способ выполняется устройством управления движением для транспортного средства согласно настоящему изобретению.
Фиг. 8A - вид в плане (часть 1) для описания способа оценки положения другого транспортного средства по прошествии необходимого времени, при этом способ выполняется устройством управления движением для транспортного средства согласно настоящему изобретению.
Фиг. 8B - вид в плане (часть 2) для описания способа оценки положения другого транспортного средства по прошествии необходимого времени, при этом способ выполняется устройством управления движением для транспортного средства согласно настоящему изобретению.
Фиг. 9A - вид в плане (часть 1) для описания способа определения, возможна ли смена полосы движения, причем способ выполняется устройством управления движением для транспортного средства согласно настоящему изобретению.
Фиг. 9B - вид в плане (часть 2) для описания способа определения, возможна ли смена полосы движения, причём способ выполняется устройством управления движением для транспортного средства согласно настоящему изобретению.
Фиг. 10 - набор схем для описания взаимного расположения в направлении ширины дороги между разметкой рассматриваемой полосы движения и рассматриваемым транспортным средством.
[Осуществление изобретения]
[0009] Фиг. 1 представляет собой блок-схему, иллюстрирующую конфигурацию устройства 1 управления движением для транспортного средства согласно одному или более вариантам осуществления настоящего изобретения. Устройство 1 управления движением для транспортного средства согласно одному или более вариантам осуществления настоящего изобретения представляет вариант осуществления способа управления движением для транспортного средства согласно настоящему изобретению. Как проиллюстрировано на фиг. 1, устройство 1 управления движением для транспортного средства согласно одному или более вариантам осуществления настоящего изобретения включает в себя датчики 11, устройство 12 обнаружения положения рассматриваемого транспортного средства, картографическую базу 13 данных, бортовое оборудование 14, устройство 15 представления, устройство 16 ввода, устройство 17 связи, устройство 18 управления движением и устройство 19 управления. Эти устройства соединены друг с другом, например, через локальную сеть контроллеров (CAN) или другую бортовую локальную сеть для взаимного обмена информацией.
[0010] Датчики 11 обнаруживают состояние движения рассматриваемого транспортного средства. Примеры датчиков 11 включают в себя переднюю камеру, которая захватывает изображения впереди рассматриваемого транспортного средства, заднюю камеру, которая захватывает изображения сзади рассматриваемого транспортного средства, передний радар, который обнаруживает препятствия впереди рассматриваемого транспортного средства, задний радар, который обнаруживает препятствия сзади рассматриваемого транспортного средства, боковые радары, которые обнаруживают препятствия, присутствующие с правой и левой стороны рассматриваемого транспортного средства, датчик скорости транспортного средства, который обнаруживает скорость транспортного средства для рассматриваемого, и бортовую камеру, которая захватывает изображения водителя. Датчики 11 могут быть представлены одним из описанных выше различных датчиков в виде сочетания двух или более датчиков. Результаты обнаружения датчиков 11 выводятся на устройство 19 управления через заданные интервалы времени.
[0011] Устройство 12 определения положения рассматриваемого транспортного средства состоит из блока GPS, гироскопического датчика, датчика скорости транспортного средства и других компонентов. Устройство 12 определения положения рассматриваемого транспортного средства обнаруживает радиоволны, передаваемые множеством спутников связи, используя блок GPS для периодического получения информации о положении целевого транспортного средства (рассматриваемого транспортного средства), и обнаруживает текущее положение целевого транспортного средства на основании полученной информации о положении целевого транспортного средства, информации об изменении угла, полученной от гироскопического датчика, и скорости транспортного средства, полученной от датчика скорости транспортного средства. Информация о положении целевого транспортного средства, обнаруженная устройством 12 обнаружения положения рассматриваемого транспортного средства, выводится в устройство 19 управления через заданные интервалы времени.
[0012] Картографическая база 13 данных сохраняет картографическую информацию, которая включает в себя информацию о положении различных объектов и конкретных точек. В частности, картографическая база 13 данных сохраняет информацию о положении точек слияния и точек разветвления на дорогах, пунктов оплаты проезда, положениях, в которых количество полос движения уменьшается, зон обслуживания (SA)/зон парковки (PA) и т.д. вместе с картографической информацией. Устройство 19 управления может обращаться к картографической информации, сохранённой в картографической базе данных.
[0013] Бортовое оборудование 14 включает в себя различные модули, установленные в транспортном средстве, и управляется водителем. Примеры такого бортового оборудования включают в себя рулевое управление, педаль акселератора, педаль тормоза, навигационное устройство, аудиоустройство, кондиционер, переключатель громкой связи, стеклоподъемники, стеклоочистители, фары, световые сигналы, звуковой сигнал и конкретные переключатели. Когда водитель управляет бортовым оборудованием 14, его информация выводится на устройство 19 управления.
[0014] Устройство 15 представления представляет собой, например, такое устройство, как дисплей навигационного устройства, дисплей, встроенный в зеркало заднего вида, дисплей, встроенный в приборный блок, дисплей на лобовом стекле, проецируемый на лобовое стекло, громкоговоритель аудиоустройства или устройство сиденья со встроенными вибрирующими элементами. Устройство 15 представления сообщает водителю информацию представления и информацию управления движением, которая будет описана ниже, под управлением устройства 19 управления. Информация управления движением включает в себя информацию о запуске автономного управления движением транспортного средства, информацию управления движением транспортного средства при смене полосы движения, информацию управления движением при правом повороте или информацию управления движением при левом повороте транспортного средства, информацию управления движением транспортного средства при выезде с главной дороги, управления въездом транспортного средства на главную дорогу и т.п.
[0015] Устройство 16 ввода представляет собой, например, устройство, такое как дисковый переключатель или сенсорная панель, расположенная на экране дисплея, с помощью которой водитель может вводить информацию посредством ручного управления, или микрофон, с помощью которого водитель может вводить информацию посредством голоса. В одном или более вариантах осуществления настоящего изобретения водитель может управлять устройством 16 ввода, чтобы тем самым ввести ответную информацию в ответ на информацию представления, которая представляется устройством 15 представления. Например, в одном или более вариантах осуществления настоящего изобретения в качестве устройства 16 ввода также могут использоваться переключатели световых сигналов или другое бортовое оборудование 14. Более конкретно, устройство 16 ввода может быть выполнено таким образом, что водитель включает переключатель светового сигнала, чтобы тем самым ввести подтверждение или разрешение на изменение управления движением в ответ на запрос о том, выполняет ли устройство 19 управления автономно изменения управления движением. Ответная информация, которая вводится через устройство 16 ввода, выводится на устройство 19 управления.
[0016] Устройство 17 связи осуществляет связь с оборудованием связи, расположенным за пределами рассматриваемого транспортного средства. Например, устройство 17 связи осуществляет связь между транспортными средствами с другим транспортным средством, осуществляет связь между дорожной инфраструктурой и транспортным средством с с оборудованием, предусмотренным на обочине дороги, или выполняет беспроводную связь с информационным сервером, предусмотренным за пределами транспортного средства, и таким образом может получать различные информационные элементы от внешнего оборудования. Информация, получаемая устройством связи, выводится в устройство 19 управления.
[0017] Устройство 18 управления движением управляет движением рассматриваемого транспортного средства. Например, когда рассматриваемое транспортное средство выполняет управление движением со следованием для следования за движущимся впереди транспортным средством, устройство 18 управления движением управляет работой приводного механизма (что включает в себя работу двигателя внутреннего сгорания в случае автомобиля с двигателем внутреннего сгорания и работу электродвигателя для движения в случае электромобиля и дополнительно включает в себя распределение крутящего момента для двигателя внутреннего сгорания и электродвигателя для движения в случае гибридного автомобиля) и операцию торможения для обеспечения ускорения, замедления и скорости транспортного средства таким образом, чтобы расстояние между рассматриваемым транспортным средством и движущимся впереди транспортным средством поддерживалось на постоянном расстоянии. В качестве дополнения или альтернативы, когда рассматриваемое транспортное средство выполняет управление по удержанию полосы движения с обнаружением разметки полосы движения для полосы движения, по которой движется рассматриваемое транспортное средство (также называемой далее «рассматриваемой полосой движения»), и управляет положением движения рассматриваемого транспортного средства на дороге в направлении ширины таким образом, чтобы рассматриваемое транспортное средство двигалось по рассматриваемой полосе движения, или когда рассматриваемое транспортное средство выполняет управление для смены полосы движения, такое как обгон движущегося впереди транспортного средства или изменение направления движения, или когда рассматриваемое транспортное средство выполняет управление движением для поворота направо или налево на перекрестке и тому подобном, устройство 18 управления движением выполняет управление рулевым управлением рассматриваемого транспортного средства путём управления работой исполнительного механизма рулевого управления в дополнение к работе механизма привода и операции торможения для обеспечения упомянутых ускорения, замедления и скорости транспортного средства. Устройство 18 управления движением управляет движением рассматриваемого транспортного средства в соответствии с командами от устройства 19 управления, которые будут описаны ниже. В качестве способа управления движением, выполняемого устройством 18 управления движением, также может использоваться любой из других хорошо известных способов.
[0018] Устройство 19 управления состоит из постоянного запоминающего устройства (ROM), которое сохраняет программы для управления движением рассматриваемого транспортного средства, центрального процессора (CPU), который выполняет программы, сохранённые в ROM, и запоминающего устройства с произвольным доступом (RAM), которое служит в качестве запоминающего устройства с возможностью осуществления доступа. В качестве замены или в дополнение к CPU в качестве схемы управления могут использоваться микропроцессор (MPU), цифровой сигнальный процессор (DSP), специализированная интегральная схема (ASIC), программируемая вентильная матрица (FPGA) и тому подобное.
[0019] Устройство 19 управления выполняет программы, сохранённые в ROM, с использованием CPU, тем самым реализуя функцию сбора информации о движении для получения информации, относящейся к состоянию движения рассматриваемого транспортного средства, функцию определения ситуации движения для определения ситуации движения рассматриваемого транспортного средства, функцию управления движением для управления движением рассматриваемого транспортного средства, функцию управления сменой полосы движения для определения, возможна ли смена полосы движения, и управления сменой полосы движения, функцию представления информации управления движением для представления водителю информации о смене полосы движения, относящейся к операции движения рассматриваемого транспортного средства, выполняемой управлением сменой полосы движения, функцию подтверждения согласия для подтверждения, согласен ли водитель со сменой полосы движения в ответ на представленную информацию о смене полосы движения, и функцию определения степени срочности для определения степени срочности согласия от водителя. Эти функции устройства 19 управления будут описаны ниже.
[0020] Функция получения информации о движении устройства 19 управления является функцией получения информации о движении, относящейся к состоянию движения рассматриваемого транспортного средства. Например, устройство 19 управления использует функцию получения информации о движении для получения в качестве информации о движении информации внешнего изображения вокруг транспортного средства, захватываемого передней камерой и задней камерой, включенными в состав датчиков 11, и/или результатов обнаружения передним радаром, задним радаром и боковыми радарами, включёнными в состав датчиков 11. В качестве дополнения или альтернативы, устройство 19 управления использует функцию получения информации о движении для получения в качестве информации о движении информации о скорости транспортного средства для рассматриваемого транспортного средства, обнаруженной датчиком скорости транспортного средства, включенным в состав датчиков 11, и/или информации изображения лица водителя, захватываемого бортовой камерой, включённой в состав датчиков 11.
[0021] В качестве дополнения или альтернативы, устройство 19 управления использует функцию получения информации о движении для получения в качестве информации о движении информации о текущем положении рассматриваемого транспортного средства от устройства 12 обнаружения положения рассматриваемого транспортного средства. В качестве дополнения или альтернативы, устройство 19 управления использует функцию получения информации о движении для получения в качестве информации о движении информации о положении точек слияния, точек разветвления, пунктов оплаты проезда, положений, в которых количество полос уменьшается, зон обслуживания (SA)/зон парковки (PA) и т.д. из картографической базы 13 данных. Кроме того, устройство 19 управления использует функцию получения информации о движении для получения в качестве информации о движении информации об управлении бортовым оборудованием 14, выполняемом водителем, от бортового оборудования 14.
[0022] Функция определения ситуации движения устройства 19 управления является функцией обращения к таблице, сохранённой в ROM устройства 19 управления, для определения ситуации движения, в которой движется рассматриваемое транспортное средство. Фиг. 2 - схема, иллюстрирующая пример таблицы, используемой для определения ситуации движения. Как проиллюстрировано на Фиг. 2, в таблице сохранены ситуации движения, подходящие для смены полосы движения, и условия определения для каждой ситуации движения. Устройство 19 управления использует функцию определения ситуации движения для обращения к таблице, проиллюстрированной на Фиг. 2, для определения, является ли ситуация движения рассматриваемого транспортного средства ситуацией движения, подходящей для смены полосы движения.
[0023] Например, в примере, проиллюстрированном на Фиг. 2, условие определения для «ситуации сближения с движущимся впереди транспортным средством» определяется четырьмя условиями: условием, что «движущееся впереди транспортное средство присутствует впереди», условием «скорость транспортного средства для движущегося впереди транспортного средства < установленной скорости транспортного средства для рассматриваемого транспортного средства, условием «достижения движущегося впереди транспортного средства в пределах заданного времени» и условием, что «направление смены полосы движения не соответствует условию запрета смены полосы движения». Устройство 19 управления использует функцию определения ситуации движения для определения того, удовлетворяет ли рассматриваемое транспортное средство указанным выше условиям, например, на основании результатов обнаружения от передней камеры и/или переднего радара, включенных в состав датчиков 11, скорости транспортного средства для рассматриваемого транспортного средства, обнаруженной датчиком скорости транспортного средства, включенным в состав датчиков 11, информации о положении рассматриваемого транспортного средства, обнаруженной устройством 12 обнаружения положения рассматриваемого транспортного средства, и т.д. Если вышеуказанные условия выполнены, устройство 19 управления определяет, что рассматриваемое транспортное средство находится в «ситуации сближения с движущимся впереди транспортным средством». Аналогичным образом, для всех других ситуаций движения, зарегистрированных в таблице определения ситуаций, проиллюстрированной на Фиг. 2, устройство 19 управления использует функцию определения ситуации движения для определения, выполнено ли каждое условие определения.
[0024] Примеры условия запрета смены полосы движения включают в себя условие, что «рассматриваемое транспортное средство движется в зоне запрета смены полосы движения», условие, что «в направлении смены полосы движения имеется препятствие», условие, что «рассматриваемое транспортное средство пересечёт осевую линию (осевую линию дороги)» и условие, что «рассматриваемое транспортное средство выедет на обочину дороги или пересечёт конец дороги». На дороге, на которой разрешена аварийная остановка на обочине дороги или тому подобном в «ситуации экстренной эвакуации», условие, что «рассматриваемое транспортное средство выедет на обочину дороги или пересечёт конец дороги», может быть разрешено в «ситуации экстренной эвакуации». Для таблицы, проиллюстрированной на Фиг. 2, уровень необходимости смены полосы движения, ограничение по времени и направление смены полосы движения будут описаны ниже.
[0025] Если ситуация движения рассматриваемого транспортного средства соответствует множеству ситуаций движения, устройство 19 управления использует функцию определения ситуации движения для определения в качестве ситуации движения рассматриваемого транспортного средства ситуации движения, имеющей более высокий уровень необходимости смены полосы движения. Например, предположим, что в таблице, проиллюстрированной на Фиг. 2, ситуация движения рассматриваемого транспортного средства соответствует «ситуации сближения с движущимся впереди транспортным средством» и «ситуации перехода на полосу движения в направлении места назначения», а уровень X1 необходимости смены полосы движения в «ситуации сближения с движущимся впереди транспортным средством» ниже, чем уровень X8 необходимости смены полосы движения в «ситуации перехода на полосу движения в направлении места назначения» (X1 [0026] Функция управления движением устройства 19 управления является функцией управления движением рассматриваемого транспортного средства. Например, устройство 19 управления использует функцию управления движением для обнаружения разметки полосы движения для рассматриваемой полосы движения, по которой движется рассматриваемое транспортное средство, на основании результатов обнаружения датчиков 11 и выполнения управления удержанием полосы движения для управления положением движения рассматриваемого транспортного средства в направлении ширины дороги таким образом, чтобы рассматриваемое транспортное средство двигалось по рассматриваемой полосе движения. В этом случае устройство 19 управления использует функцию управления движением, чтобы позволить устройству 18 управления движением управлять работой исполнительного механизма рулевого управления и тому подобного таким образом, чтобы рассматриваемое транспортное средство двигалось в надлежащем положении движения. В качестве дополнения или альтернативы, устройство 19 управления может также использовать функцию управления движением для выполнения управления движением со следованием для автономного следования за движущимся впереди транспортным средством на определенном расстоянии от движущегося впереди транспортного средства. При выполнении управления движением со следованием устройство 19 управления использует функцию управления движением для вывода управляющих сигналов на устройство 18 управления движением, которое управляет работой приводного механизма, такого как двигатель и тормоз, таким образом, чтобы рассматриваемое транспортное средство двигалось на постоянном расстоянии между рассматриваемым транспортным средством и движущимся впереди транспортным средством. В качестве дополнения или альтернативы, ниже управление удержанием полосы движения, управление движением со следованием, управление движением для поворота направо/налево и управление сменой полосы движения будут описаны как автономное управление движением. [0027] Функция управления сменой полосы движения устройства 19 управления является функцией определения, следует ли выполнить смену полосы движения, на основании ситуации движения рассматриваемого транспортного средства и/или информации о препятствиях, имеющихся вокруг рассматриваемого транспортного средства. В качестве дополнения или альтернативы, функция управления сменой полосы движения является функцией, позволяющей устройству 18 управления движением управлять работой приводного механизма, такого как двигатель и тормоз, и работой исполнительного механизма рулевого управления при определении, что следует выполнить смену полосы движения. В качестве дополнения или альтернативы, функция управления сменой полосы движения является функцией установления момента запуска управления сменой полосы движения на основании состояния движения рассматриваемого транспортного средства и состояния водителя и выполнения управления сменой полосы движения в соответствии с установленным моментом запуска. Подробности управления сменой полосы движения с использованием функции управления сменой полосы движения будут описаны ниже. [0028] Функция представления информации управления движением устройства 19 управления является функцией представления водителю информации, относящейся к операции движения рассматриваемого транспортного средства, выполняемой автономным управлением движением, включая управление удержанием полосы движения, управление движением со следованием, управление движением для поворота направо/налево, управление сменой полосы движения, и другой информации через устройство 15 представления. Например, если при выполнении управления удержанием полосы движения впереди имеется точка разветвления дороги, съезд со скоростной автомагистрали или зона обслуживания автомобилей, может потребоваться смена полосы движения путем изменения направления движения рассматриваемого транспортного средства. В качестве дополнения или альтернативы, если при выполнении управления движением со следованием для следования за движущимся впереди транспортным средством движущееся впереди транспортное средство меняет полосу движения, рассматриваемое транспортное средство также может соответственно сменить полосу движения. Кроме того, в середине маршрута к месту назначения может потребоваться изменение направления движения, например поворот направо или налево на перекрестке или тому подобном. Если такая операция движения выполняется посредством автономного управления движением, устройство 19 управления использует функцию представления информации управления движением для представления водителю информации, относящейся к операции движения посредством управления движением, чтобы определить, возможна ли операция движения, и побудить водителя самостоятельно подтвердить безопасность, если упомянутая операция движения возможна. Момент времени представления информации управления движением может быть по меньшей мере до начала операции движения, поскольку представление информации управления движением выполняется в целях самостоятельного подтверждения безопасности водителем. [0029] Здесь будет описан пример информации управления движением, представляемой водителю перед началом операции движения. Фиг. 3 - вид в плане, иллюстрирующий ситуацию смены полосы движения согласно одному или более вариантам осуществления настоящего изобретения, то есть вид в плане, иллюстрирующий ситуацию, в которой на дороге, имеющей три полосы L1, L2 и L3 движения с каждой стороны при левостороннем движении рассматриваемое транспортное средство V0 обгоняет другое транспортное средство V1, при движении вперед. Левый вид на Фиг. 3 представляет собой вид в плане, иллюстрирующий пример управления сменой полосы движения для выполнения смены полосы движения с полосы L2 движения, по которой в настоящее время движется рассматриваемое транспортное средство, на соседнюю полосу L3 движения. А правый вид на Фиг. 3 - вид в плане, иллюстрирующий пример управления сменой полосы движения для возврата на полосу L2 движения после обгона другого транспортного средства V1. [0030] В одном или более вариантах осуществления настоящего изобретения при выполнении двух или более смен полосы движения устройство 15 представления представляет первую информацию управления движением, указывающую, что должна быть выполнена смена полосы движения, перед выполнением управления первой сменой полосы движения. Если водитель демонстрирует намерение согласиться с этим представлением, устройство 15 представления представляет вторую информацию управления движением, указывающую, что должна быть выполнена вторая смена полосы движения, после выполнения первой смены полосы движения и перед выполнением управления второй сменой полосы движения. Фиг. 3 иллюстрирует пример выполнения двух смен полосы движения. Аналогичным образом, при выполнении трех или более смен полосы движения устройство 15 представления представляет информацию управления движением, которая указывает, что должна быть выполнена смена полосы движения, перед выполнением следующей смены полосы движения, и подтверждает согласие водителя. Таким образом, устройство 19 управления согласно одному или более вариантам осуществления настоящего изобретения использует функцию представления информации управления движением, чтобы побудить водителя самостоятельно подтвердить безопасность при каждой смене полосы движения. [0031] Если устройство 15 представления включает в себя дисплей, форма представления на устройстве 15 представления с использованием функции представления информации управления движением может быть формой отображения визуального образа, включающего в себя изображение, язык и т.д. В качестве дополнения или альтернативы, если устройство 15 представления включает в себя громкоговоритель, устройство 15 представления представляет водителю информацию управления движением, включающую в себя направление движения рассматриваемого транспортного средства в направлении ширины дороги посредством управления сменой полосы движения (например, информацию управления, указывающую смену полосы движения вправо или влево) в виде звуковой информации (голоса или звука). В качестве дополнения или альтернативы, если устройство 15 представления включает в себя одну или более сигнальных ламп, установленных на приборной панели или тому подобном, конкретная сигнальная лампа может быть освещена в конкретной форме представления, тем самым представляя водителю информацию управления движением, включающую в себя направление движения рассматриваемого транспортного средства в направлении ширины дороги посредством управления сменой полосы движения. В качестве дополнения или альтернативы, если устройство 15 представления включает в себя устройство сиденья с множеством встроенных вибрирующих элементов, конкретный вибрирующий элемент может вибрировать в конкретной форме представления, тем самым представляя водителю информацию управления движением, включающую в себя направление движения рассматриваемого транспортного средства в направлении ширины дороги посредством управления сменой полосы движения. [0032] Таким образом, вместо или в дополнение к отображению информации управления движением на дисплее в виде визуальной информации, представление водителю информации управления движением в виде звуковой информации, такой как голос и звук, в виде визуальной информации через отображение посредством сигнальной лампы, или в виде тактильной информации через вибрацию позволяет водителю более интуитивно воспринимать информацию управления движением. В устройстве 1 управления движением для транспортного средства согласно одному или более вариантам осуществления настоящего изобретения, чтобы повысить осведомленность или привлечь внимание водителя к информации управления движением, представляемой на устройстве 15 представления, действие согласия от водителя в отношении каждого выполнения операции движения посредством управления движением устанавливается в отношении представления информации управления движением следующим образом. [0033] Функция подтверждения согласия устройства 19 управления является функцией подтверждения того, согласен ли водитель с операцией движения посредством управления движением, в ответ на информацию управления движением, представленную с использованием функции представления информации управления движением. Фиг. 4A-4E - наборы схем, иллюстрирующие примеры формы ввода согласия от водителя в ответ на различные формы информации управления движением, представленной с использованием функции представления информации управления движением. В этих примерах информация о смене полосы движения представлена с использованием дисплея и громкоговорителя устройства 15 представления. Как описано выше, информация управления движением согласно одному или более вариантам осуществления настоящего изобретения включает в себя, в дополнение к информации о смене полосы движения, информацию об изменении в отношении управления движением для поворота направо или управления движением для поворота налево, а также информацию об изменении в отношении управления движением для выезда с главной дороги или управления движением для въезда на главную дорогу. Фиг. 4A-4E иллюстрируют пример двух средств управления сменой полосы движения, проиллюстрированных на Фиг. 3, в котором выполняется изменение управления движением (управление первой сменой полосы движения), а затем изменение управления движением (управление второй сменой полосы движения), отличное от управления первой сменой полосы движения. [0034] При этом вариант осуществления, проиллюстрированный на Фиг. 4А - Фиг. 4E, поясняет ситуацию, в которой во время автономного управления движением транспортного средства транспортное средство переключается на первое управление движением, которое отличается от предыдущего управления движением, и после перехода к первому управлению движением переходит на второе управление движением, которое отличается от первого управления движением. Однако в примере, проиллюстрированном на Фиг. 4A-4E, «случай, когда во время автономного управления движением транспортного средства транспортное средство переключается на первое управление движением, которое отличается от предыдущего управления движением», соответствует «предыдущей смене полосы движения». И в примере, проиллюстрированном на Фиг. 4A-4E, «случай, когда после переключения на первое управление движением транспортное средство переходит на второе управление движением, которое отличается от первого управления движением», соответствует «текущей смене полосы движения». Однако в устройстве управления движением и способе управления движением по настоящему изобретению переключение на первое управление движением и переключение на второе управление движением могут быть одним и тем же управлением сменой полосы движения или могут быть разным управлением движением. Например, переключение на первое управление движением может быть переключением на управление сменой полосы движения, а переключение на второе управление движением может быть переключением на управлению движением для поворота налево или переключением на управление движением для выезда с главной дороги. Короче говоря, должно быть две или более ситуаций, в которых у водителя запрашивают согласие. [0035] Левая схема на Фиг. 4A иллюстрирует первую информацию управления движением, представленную на устройстве 15 представления перед началом смены полосы движения с центральной полосы L2 движения на крайнюю правую полосу L3 движения, как проиллюстрировано на Фиг. 3, тогда как правая схема на Фиг. 4A иллюстрирует вторую информацию управления движением, представленную на устройстве 15 представления после того, как выполнена первая смена полосы движения и до начала второго управления сменой полосы движения. В этом примере перед началом смены полосы движения с центральной полосы L2 движения на крайнюю правую полосу L3 движения, как проиллюстрировано на левой схеме на Фиг. 4A, дисплей устройства 15 представления отображает рассматриваемое транспортное средство V0 и данныеизображения вида вперед, включая полосы L1, L2 и L3 движения вместе с целью смены полосы движения рассматриваемого транспортного средства V0 икнопкой OK (кнопка ввода для ввода, указывающего, что водитель согласен со сменой полосы движения, то же самое применяется далее). Цель смены полосы движения рассматриваемого транспортного средстваV0 отображается посредством визуального образа, такого как стрелка. При этом устройство 15 представления включает в себя первый блок 151 ввода, установленный в первое положение ввода слева от центра Фиг. 4A, и второй блок 152 ввода, установленный во второе положение ввода справа от центра Фиг. 4А. Второе положение ввода отличается от первого позиции ввода. На левой схеме Фиг. 4A кнопка OK установлена в первом блоке 151 ввода и не установлена во втором блоке 152 ввода. Кроме того, вместе с этим отображением из громкоговорителя выводятся голосовые данные, например: «Вы согласны со сменой полосы движения? Если Вы согласны со сменой полосы движения, пожалуйста прикоснитесь к кнопке ОК». В качестве дополнения или альтернативы, голосовые данные могут отображаться в виде текстовых данных на дисплее. [0036] В ответ на первую информацию управления движением, проиллюстрированную на левой схеме Фиг. 4A, водитель самостоятельно визуально проверяет окружающую обстановку и тому подобное, и в случае принятия решения о согласии со сменой полосы движения или в других подобных случаях водитель прикасается к кнопке ОК, установленной в первом блоке 151 ввода. Это позволяет устройству 19 управления выполнить управление сменой полосы движения, относящееся к первой смене полосы движения (смена полосы движения с полосы L2 движения на полосу L3 движения). С другой стороны, когда прикосновение водителя к кнопке ОК по какой-либо причине не обнаруживается, устройство 19 управления прекращает управление первой сменой полосы движения (сменой полосы движения с полосы L2 движения на полосу L3 движения). [0037] Если водитель прикасается к кнопке ОК в ответ на первую информацию управления движением, проиллюстрированную на левой схеме Фиг. 4A, устройство 19 управления выполняет управление сменой полосы движения, относящееся к первой смене полосы движения (смена полосы движения с полосы L2 движения на полосу L3 движения). После этого, если определено, что возможна смена полосы движения с крайней правой полосы L3 движения на центральную полосу L2движения, устройство 15 представления представляет вторую информацию управления движением, проиллюстрированную на правой схеме Фиг. 4A, перед началом смены полосы движения с крайней правой полосы L3 движения на центральную полосу L2 движения. В этом примере перед началом второй смены полосы движения с крайней правой полосы L3 движения на центральную полосу L2 движения, как проиллюстрировано на правой схеме Фиг. 4A, дисплей устройства 15 представления отображает рассматриваемое транспортное средство V0 и данные изображениявида вперед, включая полосы L1, L2 и L3 движения вместе с целью смены полосы движения рассматриваемого транспортного средства V0 и кнопкойOK. Цель смены полосы движения рассматриваемого транспортного средства V0 отображаетсяс помощью визуального образа, такого как стрелка. На правой схеме Фиг. 4A кнопка OK установлена во втором блоке 152 ввода, а не в первом блоке 151 ввода. Кроме того, вместе с этим отображением из громкоговорителя выводятся голосовые данные, например: «Вы согласны со сменой полосы движения? Если Вы согласны со сменой полосы движения, прикоснитесь к кнопке ОК». В качестве дополнения или альтернативы, голосовые данные могут отображаться в виде текстовых данных на дисплее. [0038] В ответ на вторую информацию управления движением, проиллюстрированную на правой схеме Фиг. 4A, водитель самостоятельно визуально проверяет окружающую обстановку и тому подобное, и в случае принятия решения о согласии со сменой полосы движения или в других подобных случаях водитель прикасается к кнопке «ОК», установленной во втором блоке 152 ввода. Это позволяет устройству 19 управления выполнить управление сменой полосы движения, относящееся ко второй смене полосы движения (смена полосы движения с полосы L3 движения на полосу L2 движения). С другой стороны, если прикосновение водителя к кнопке ОК по какой-либо причине не обнаруживается, устройство 19 управления прекращает вторую смену полосы движения (смену полосы движения с полосы L3 движения на полосу L2 движения). [0039] Как описано выше, в отношении намерения водителя о согласии в ответ на информацию управления движением, представленную на устройстве 15 представления, проиллюстрированном на Фиг. 4A, второй ввод согласия (далее также называемый текущим вводом согласия) посредством прикосновения к кнопке ОК, установленной во втором блоке 152 ввода, проиллюстрированном на правой схеме Фиг. 4A устанавливается отличным от первого ввода согласия (далее также называемого предыдущим вводом согласия) посредством прикосновения к кнопке OK, установленной в первом блоке 151 ввода, проиллюстрированном на левой схеме Фиг. 4A, с точки зрения формы ввода, то есть положения ввода. Другими словами, кнопка ОК, указывающая на намерение о согласии, не устанавливается в уникальное положение. Следовательно, водитель должен проверять положение кнопки ОК, которое изменяется каждый раз, когда выполняется операция движения посредством управления движением, такая как смена полосы движения, тем самым предотвращая отвлечение внимания. В результате сам водитель становится более осведомленным о подтверждении безопасности, и таким образом, появляется возможность контролировать работу рассматриваемого транспортного средства. [0040] Левая схема Фиг. 4B иллюстрирует первую информацию управления движением, представляемую на устройстве 15 представления перед началом смены полосы движения с центральной полосы L2 движения на крайнюю правую полосу L3 движения, как проиллюстрировано на Фиг. 3, тогда как правая схема на Фиг. 4B иллюстрирует вторую информацию управления движением, представляемую на устройстве 15 представления после выполнения первой смены полосы движения и до начала второй смены полосы движения. В этом примере перед началом смены полосы движения с центральной полосы L2 движения на крайнюю правую полосу L3 движения, как проиллюстрировано на левой схеме Фиг. 4B, дисплей устройства 15 представления отображает рассматриваемое транспортное средство V0 и данные изображения вида вперёд, включая полосы L1, L2 и L3 движения, вместе с целью смены полосы движения рассматриваемого транспортного средства V0, кнопкой OK и кнопкой NG (кнопка ввода для ввода, указывающего, что водитель не согласен с управлением сменой полосы движения, то же самое применяется далее). Цель смены полосы движения рассматриваемого транспортного средства V0 отображается посредством визуального образа, такого как стрелка. В качестве дополнения или альтернативы, устройство 15 представления включает в себя первый блок 151 ввода, установленный в первом положении ввода слева от центра Фиг. 4B, и второй блок 152 ввода, установленный во втором положении ввода справа от центра Фиг. 4B. Второе положение ввода отличается от первого положения ввода. На левой схеме Фиг. 4B кнопка ОК установлена в первом блоке 151 ввода, а кнопка NG установлена во втором блоке 152 ввода. Кроме того, вместе с этим отображением из громкоговорителя выводятся голосовые данные, например: «Вы согласны со сменой полосы движения? Если Вы согласны со сменой полосы движения, пожалуйста прикоснитесь к кнопке ОК». В качестве дополнения или альтернативы, голосовые данные могут отображаться в виде текстовых данных на дисплее. [0041] В ответ на первую информацию управления движением, проиллюстрированную на левой схеме Фиг. 4B, водитель самостоятельно визуально проверяет окружающую обстановку и тому подобное, и в случае принятия решения о согласии со сменой полосы движения или в других подобных случаях водитель прикасается к кнопке «ОК», установленной в первом блоке 151 ввода. Это позволяет устройству 19 управления выполнить управление сменой полосы движения, относящееся к первой смене полосы движения (смена полосы движения с полосы L2 движения на полосу L3 движения). С другой стороны, если по какой-либо причине обнаруживается прикосновение водителя к кнопке NG, устройство 19 управления прекращает управление первой сменой полосы движения (сменой полосы движения с полосы L2 движения на полосу L3 движения). [0042] Если водитель касается кнопки ОК для первой информации управления движением, проиллюстрированной на левой схеме Фиг. 4B, устройство 19 управления выполняет управление сменой полосы движения, относящееся к первой смене полосы движения (смена полосы движения с полосы L2 движения на полосу L3 движения). После этого, если определено, что возможна смена полосы движения с крайней правой полосы L3 движения на центральную полосу L2 движения, устройство 15 представления представляет вторую информацию управления движением, проиллюстрированную на правой схеме Фиг. 4B, перед началом смены полосы движения с крайней правой полосы L3 движения на центральную полосу L2 движения. В этом примере перед началом второй смены полосы движения с крайней правой полосы L3 движения на центральную полосу L2 движения, как проиллюстрировано на правой схеме Фиг. 4B, дисплей устройства 15 представления отображает рассматриваемое транспортное средство V0 и данные изображения вида вперёд, включая полосы L1, L2 и L3 движения, вместе с целью смены полосы движения рассматриваемого транспортного средства V0, кнопкой OK и кнопкой NG. Цель смены полосы движения рассматриваемого транспортного средства V0 отображается посредством визуального образа, такого как стрелка. На правой схеме Фиг. 4B кнопка OK установлена во втором блоке 152 ввода, а кнопка NG установлена в первом блоке 151 ввода. Другими словами, положения кнопки ОК и кнопки NG, отображаемые на устройстве 15 представления, меняются местами от предыдущего ввода согласия к текущему вводу согласия. Кроме того, вместе с этим отображением из динамика выводятся голосовые данные, например: «Вы согласны со сменой полосы движения? Если Вы согласны со сменой полосы движения, пожалуйста прикоснитесь к кнопке ОК». В качестве дополнения или альтернативы, голосовые данные могут отображаться в виде текстовых данных на дисплее. [0043] В ответ на вторую информацию управления движением, проиллюстрированную на правой схеме Фиг. 4B, водитель самостоятельно визуально проверяет окружающую обстановку и тому подобное, и в случае принятия решения о согласии со сменой полосы движения или в других подобных случаях водитель прикасается к кнопке ОК, установленную во втором блоке 152 ввода. Это позволяет устройству 19 управления выполнить управление сменой полосы движения, относящееся ко второй смене полосы движения (смена полосы движения с полосы L3 движения на полосу L2 движения). С другой стороны, если по какой-либо причине обнаруживается прикосновение водителя к кнопке NG, устройство 19 управления прекращает вторую смену полосы движения (смену полосы движения с полосы L3 движения на полосу L2 движения). [0044] Как описано выше, в отношении намерения водителя на согласие в ответ на информацию управления движением, представляемую на устройстве 15 представления, проиллюстрированном на Фиг. 4B, текущий ввод согласия посредством прикосновения к кнопке OK, установленной во втором блоке 152 ввода, проиллюстрированном на правой схеме Фиг. 4B, устанавливается отличным от предыдущего ввода согласия посредством прикосновения к кнопке ОК, установленной в первом блоке 151 ввода, проиллюстрированном на левой схеме Фиг. 4B, с точки зрения формы ввода, то есть положения ввода. Что касается намерения водителя отказаться от согласия в ответ на информацию управления движением, представляемую на устройстве 15 представления, ввод согласия посредством прикосновения к кнопке ОК, установленной в первом блоке 151 ввода, проиллюстрированном на правой схеме Фиг. 4B, устанавливается отличным от ввода несогласия посредством прикосновения к кнопке NG, установленной во втором блоке 152 ввода, проиллюстрированном на левой схеме Фиг. 4B, с точки зрения формы ввода, то есть положения ввода. Другими словами, кнопка OK, указывающая на намерение согласиться, и кнопка NG, указывающая на намерение не согласиться, не установлены в уникальные положения. Следовательно, поскольку водитель должен проверять положения кнопки OK и кнопки NG, которые изменяются каждый раз, когда выполняется операция движения посредством управления движением, такая как смена полосы движения, отвлечение внимания подавляется. В результате сам водитель становится более осведомленным о подтверждении безопасности, и, таким образом, появляется возможность контролировать работу рассматриваемого транспортного средства. [0045] Левая схема Фиг. 4C иллюстрирует первую информацию управления движением, представляемую на устройстве 15 представления перед началом смены полосы движения с центральной полосы L2 движения на крайнюю правую полосу L3 движения, как проиллюстрировано на Фиг. 3, тогда как правая схема на Фиг. 4C иллюстрирует вторую информацию управления движением, представляемую на устройстве 15 представления после того, как выполнена первая смена полосы движения и до начала второй смены полосы движения. В этом примере перед началом смены полосы движения с центральной полосы L2 движения на крайнюю правую полосу L3 движения, как проиллюстрировано на левой схеме Фиг. 4C, дисплей устройства 15 представления отображает рассматриваемое транспортное средство V0 и данные изображения вида вперёд, включая полосы L1, L2 и L3 движения, вместе с целью смены полосы движения рассматриваемого транспортного средства V0, кнопкой


[0046] В ответ на первую информацию управления движением, проиллюстрированную на левой схеме Фиг. 4С, водитель визуально проверяет окружающую ситуацию и тому подобное, и в случае принятия решения о согласии со сменой полосы движения или в других подобных случаях водитель нажимает кнопку
[0047] Если водитель прикасается к кнопке
[0048] В ответ на вторую информацию управления движением, проиллюстрированную на правой схеме Фиг. 4С, водитель самостоятельно визуально проверяет окружающую ситуацию и тому подобное, и в случае принятия решения о согласии со сменой полосы движения или в других подобных случаях водитель прикасается к кнопке
[0049] Как описано выше, в отношении намерения водителя на согласие в ответ на информацию управления движением, представленную на устройстве 15 представления, проиллюстрированном на Фиг. 4С, текущий ввод согласия посредством прикосновения к кнопке
[0050] Левая схема Фиг. 4D иллюстрирует первую информацию управления движением, представляемую на устройстве 15 представления перед началом смены полосы движения с центральной полосы L2 движения на крайнюю правую полосу L3 движения, как проиллюстрировано на фиг. 3, тогда как правая схема на Фиг. 4D иллюстрирует вторую информацию управления движением, представляемую на устройстве 15 представления после выполнения первой смены полосы движения и до начала второй смены полосы движения. В этом примере перед началом смены полосы движения с центральной полосы L2 движения на крайнюю правую полосу L3 движения, как проиллюстрировано на левой схеме Фиг. 4D, дисплей устройства 15 представления отображает рассматриваемое транспортное средство V0 и данные изображения вида вперёд, включая полосы L1, L2 и L3 движения, вместе с целью смены полосы движения рассматриваемого транспортного средства V0 и множеством кнопок
[0051] В ответ на первую информацию управления движением, проиллюстрированную на левой схеме Фиг. 4D, водитель визуально проверяет окружающую обстановку и тому подобное, и в случае принятия решения о согласии со сменой полосы движения или в других подобных случаях водитель прикасается к кнопкам
[0052] Если водитель прикасается к кнопкам
[0053] В ответ на вторую информацию управления движением, проиллюстрированную на правой схеме Фиг. 4D, водитель визуально проверяет окружающую ситуацию и тому подобное, и в случае принятия решения о согласии со сменой полосы движения или в других подобных случаях водитель прикасается к кнопкам
[0054] Как описано выше, в отношении намерения водителя на согласие в ответ на информацию управления движением, представленную на устройстве 15 представления, проиллюстрированном на Фиг. 4D, текущий ввод согласия посредством прикосновения к кнопкам
[0055] Левая схема Фиг. 4E иллюстрирует первую информацию управления движением, представляемую на устройстве 15 представления перед началом смены полосы движения с центральной полосы L2 движения на крайнюю правую полосу L3 движения, как проиллюстрировано на Фиг. 3, тогда как правая схема на Фиг. 4E иллюстрирует вторую информацию управления движением, представляемую на устройстве 15 представления после выполнения первой смены полосы движения и до начала второй смены полосы движения. В этом примере перед началом смены полосы движения с центральной полосы L2 движения на крайнюю правую полосу L3 движения, как проиллюстрировано на левой схеме Фиг. 4E, дисплей устройства 15 представления отображает рассматриваемое транспортное средство V0 и данные изображения вида вперёд, включая полосы L1, L2 и L3 движения, вместе с целью смены полосы движения рассматриваемого транспортного средства V0, посредством визуального образа, такого как стрелка. В качестве дополнения или альтернативы, в качестве устройства ввода для приема ввода намерения водителя на согласие устанавливаются определённая кнопка, предусмотренная на рулевом управлении (первое устройство ввода), и рычаг указателя поворота (второе устройство ввода). Кроме того, вместе с этим отображением из громкоговорителя выводятся голосовые данные, например: «Вы согласны со сменой полосы движения? Если Вы согласны со сменой полосы движения, пожалуйста прикоснитесь к кнопке на рулевом управлении». В качестве дополнения или альтернативы, голосовые данные могут отображаться в виде текстовых данных на дисплее. Кроме того, устройство ввода может быть кнопкой на рулевом управлении, рычагом указателя поворота или другими устройствами ввода, управляемыми водителем, такими как различные кнопки на навигационном устройстве, различные кнопки на аудиоустройстве и различные кнопки на устройстве кондиционирования воздуха. Устройство ввода также может быть бортовой камерой, которая обнаруживает жесты водителя, или микрофоном, который обнаруживает голос водителя, указывающий на согласие, для распознавания голоса.
[0056] В ответ на первую информацию управления движением, проиллюстрированную на левой схеме Фиг. 4E, водитель визуально проверяет окружающую обстановку и тому подобное, и в случае принятия решения о согласии со сменой полосы движения или в других подобных случаях водитель прикасается к кнопке на рулевом управлении, установленной в качестве первого устройства ввода. Это позволяет устройству 19 управления выполнить управление сменой полосы движения, относящееся к первой смене полосы движения (смене полосы движения с полосы L2 движения на полосу L3 движения). С другой стороны, если прикосновение водителя к кнопке на рулевом управлении по какой-либо причине не обнаруживается, устройство 19 управления прекращает управление первой сменой полосы движения (сменой полосы движения с полосы L2 движения на полосу L3 движения).
[0057] Когда водитель прикасается к кнопке на рулевом управлении в ответ на первую информацию управления движением, проиллюстрированную на левой схеме Фиг. 4E, устройство 19 управления выполняет управление сменой полосы движения, относящееся к первой смене полосы движения (смена полосы движения с полосы L2 движения на полосу L3 движения). После этого, если определено, что возможна смена полосы движения с крайней правой полосы L3 движения на центральную полосу L2 движения, устройство 15 представления представляет вторую информацию управления движением, проиллюстрированную на правой схеме Фиг. 4E, перед началом смены полосы движения с крайней правой полосы L3 движения на центральную полосу L2 движения. В этом примере перед началом смены полосы движения с крайней правой полосы L3 движения на центральную полосу L2 движения, как проиллюстрировано на правой схеме Фиг. 4E, дисплей устройства 15 представления отображает рассматриваемое транспортное средство V0 и данные изображения вида вперёд, включая полосы L1, L2 и L3 движения, вместе с целью смены полосы движения рассматриваемого транспортного средства V0, посредством визуального образа, такого как стрелка. Кроме того, вместе с этим отображением из громкоговорителя выводятся голосовые данные, например: «Вы согласны со сменой полосы движения? Если Вы согласны со сменой полосы движения, пожалуйста включите рычаг указателя поворота». В качестве дополнения или альтернативы, голосовые данные могут отображаться в виде текстовых данных на дисплее.
[0058] В ответ на вторую информацию управления движением, проиллюстрированную на правой схеме Фиг. 4E, водитель визуально проверяет окружающую обстановку и тому подобное, и в случае принятия решения о согласии со сменой полосы движения или в других подобных случаях водитель управляет рычагом указателя поворота, установленным в качестве второго устройства ввода. Это позволяет устройству 19 управления выполнить управление сменой полосы движения, относящееся ко второй смене полосы движения (смена полосы движения с полосы L3 движения на полосу L2 движения). С другой стороны, если по какой-либо причине действие рычагом указателя поворота не обнаруживается, устройство 19 управления прекращает вторую смену полосы движения (смену полосы движения с полосы L3 движения на полосу L2 движения).
[0059] Как описано выше, в отношении намерения водителя на согласие в ответ на информацию управления движением, представленную на устройстве 15 представления, проиллюстрированном на Фиг. 4E, текущий ввод согласия посредством приведения в действие рычага указателя поворота, установленного в качестве второго устройства ввода, проиллюстрированного на правой схеме Фиг. 4E установлен отличным от предыдущего ввода согласия посредством прикосновения к кнопке на рулевом управлении, установленной в качестве первого устройства ввода, проиллюстрированного на левой схеме Фиг. 4E, с точки зрения формы ввода, то есть устройства ввода. Другими словами, устройство ввода для указания водителем намерения на согласие не установлено в уникальное устройство. Следовательно, поскольку водитель должен проверять устройство ввода, которое изменяется каждый раз, когда выполняется операция движения посредством управления движением, такая как смена полосы движения, отвлечение подавляется. В результате сам водитель становится более осведомленным о подтверждении безопасности, и таким образом появляется возможность контролировать работу рассматриваемого транспортного средства.
[0060] Количество смен полосы движения на Фиг. 4А - Фиг. 4E составляет два, но действие согласия от водителя в отношении третьего и последующих изменений управления движением может представлять собой форму ввода, отличную от предыдущей формы ввода. В качестве дополнения или альтернативы, в одном или более вариантах осуществления настоящего изобретения, в принципе, форма ввода для текущего ввода согласия от водителя в ответ на переключение на второе управление движением устанавливается в форму, отличную от формы ввода для предыдущего ввода согласия от водителя в ответ на переключение к первому управлению движением, но когда степень срочности текущего ввода согласия от водителя равна или больше заданного порогового значения, форма ввода для текущего ввода согласия может быть установлена в ту же форму, что и форма ввода для предыдущего ввода согласия, вместо установления формы ввода, отличной от формы ввода для предыдущего ввода согласия. Функция определения степени срочности устройства 19 управления, проиллюстрированная на Фиг. 1, представляет собой функцию определения того, равна ли или больше степень срочности текущего ввода согласия от водителя заданного порогового значения, и когда степень срочности ввода согласия равна или больше порогового значения, вместо установления формы ввода для текущего ввода согласия в форму ввода, отличную от формы ввода для предыдущего ввода согласия, устанавливают ту же форму, что и форма ввода для предыдущего ввода согласия.
[0061] Случай, когда степень срочности ввода согласия от водителя больше, имеет место, например, когда расстояние до съезда на развязку, въезда в зону обслуживания или съезда с автострады является коротким и недостаточно времени для переключения управления движением транспортного средства. Случай также включает в себя условия, в которых точность обнаружения окружения транспортного средства датчиком 11 часто является низкой, например в плохую погоду, и надежность автономного управления движением посредством устройства 1 управления движением транспортного средства падает ниже определенного порогового значения. Если имеется достаточно времени для переключения на управление движением транспортного средства, или если надежность автономного управления движением высока, водитель меньше отвлекается и меньше контролирует транспортное средство. Следовательно, в устройстве 1 управления движением для транспортного средства согласно одному или более вариантам осуществления настоящего изобретения, в принципе, форма ввода для настоящего ввода согласия от водителя в ответ на переключение на второе управление движением устанавливается в форму ввода, отличную от формы ввода для предыдущего ввода согласия от водителя в ответ на переключение на первое управление движением, но когда степень срочности ввода согласия от водителя равна или больше заданного порогового значения в ситуации, описанной выше, форма ввода для текущего ввода согласия может быть установлена в ту же форму, что и форма ввода для предыдущего ввода согласия, чтобы отдать приоритет быстрому указанию от водителя. Это позволяет водителю сосредоточиться на контроле транспортного средства, не уделяя дополнительного внимания форме ввода для текущего ввода согласия.
[0062] Теперь будет описан процесс управления сменой полосы движения согласно одному или более вариантам осуществления настоящего изобретения с обращением к Фиг. 5А – Фиг. 5Е. Фиг. 5A-5E - блок-схемы, иллюстрирующие процесс управления сменой полосы движения согласно одному или более вариантам осуществления настоящего изобретения. Описанный ниже процесс управления сменой полосы движения выполняется устройством 19 управления через заданные интервалы времени. Далее будет поясняться ситуация смены полосы движения посредством функции управления движением устройства 19 управления, проиллюстрированного на Фиг. 3, предполагая, что для управления положением движения рассматриваемого транспортного средства V0 в направлении ширины рассматриваемой полосы L2 движения выполняется управление удержанием полосы движения, так что рассматриваемое транспортное средство V0 движется по рассматриваемой полосе L2 движения, и что при обгоне движущегося впереди другого транспортного средства V1, рассматриваемое транспортное средство V0 обгоняет другое транспортное средство V1 при движении по полосе L3 движения, а затем возвращается на рассматриваемую полосу L2 движения.
[0063] Сначала на этапе S1 по Фиг. 5A устройство 19 управления использует функцию получения информации о движении для получения информации о движении, относящейся к состоянию движения рассматриваемого транспортного средства. За этапом S1 следует этап S2, на котором устройство 19 управления использует функцию определения ситуации движения для определения ситуации движения рассматриваемого транспортного средства на основании информации о движении, полученной на этапе S1.
[0064] На этапе S3 устройство 19 управления использует функцию определения ситуации движения для определения, является ли ситуация движения рассматриваемого транспортного средства, определенная на этапе S2, ситуацией движения, подходящей для смены полосы движения. В частности, если ситуация движения рассматриваемого транспортного средства является любой из ситуаций движения, проиллюстрированных на Фиг. 2, функция определения ситуации движения используется для определения того, что ситуация движения рассматриваемого транспортного средства является ситуацией движения, подходящей для смены полосы движения. Если ситуация движения рассматриваемого транспортного средства не является ситуацией движения, подходящей для смены полосы движения, процесс возвращается к этапу S1, с которого определение ситуации движения повторяется. Если ситуация движения рассматриваемого транспортного средства является ситуацией движения, подходящей для смены полосы движения, процесс переходит к этапу S4.
[0065] На этапе S4 устройство 19 управления использует функцию управления сменой полосы движения для обнаружения расстояний до объектов. В частности, устройство 19 управления использует функцию управления сменой полосы движения для обнаружения препятствий, имеющихся вокруг рассматриваемого транспортного средства, на основании информации внешнего изображения вокруг транспортного средства, захватываемого передней камерой и задней камерой, включенными в состав датчиков 11, и/или информации о движении, включающей в себя результаты обнаружения передним радаром, задним радаром и боковыми радарами, включенными в состав датчиков 11. Затем устройство 19 управления использует функцию управления сменой полосы движения для обнаружения расстояний, которые расположены сбоку от рассматриваемого транспортного средства и в которых отсутствуют препятствия, в качестве расстояний до объектов.
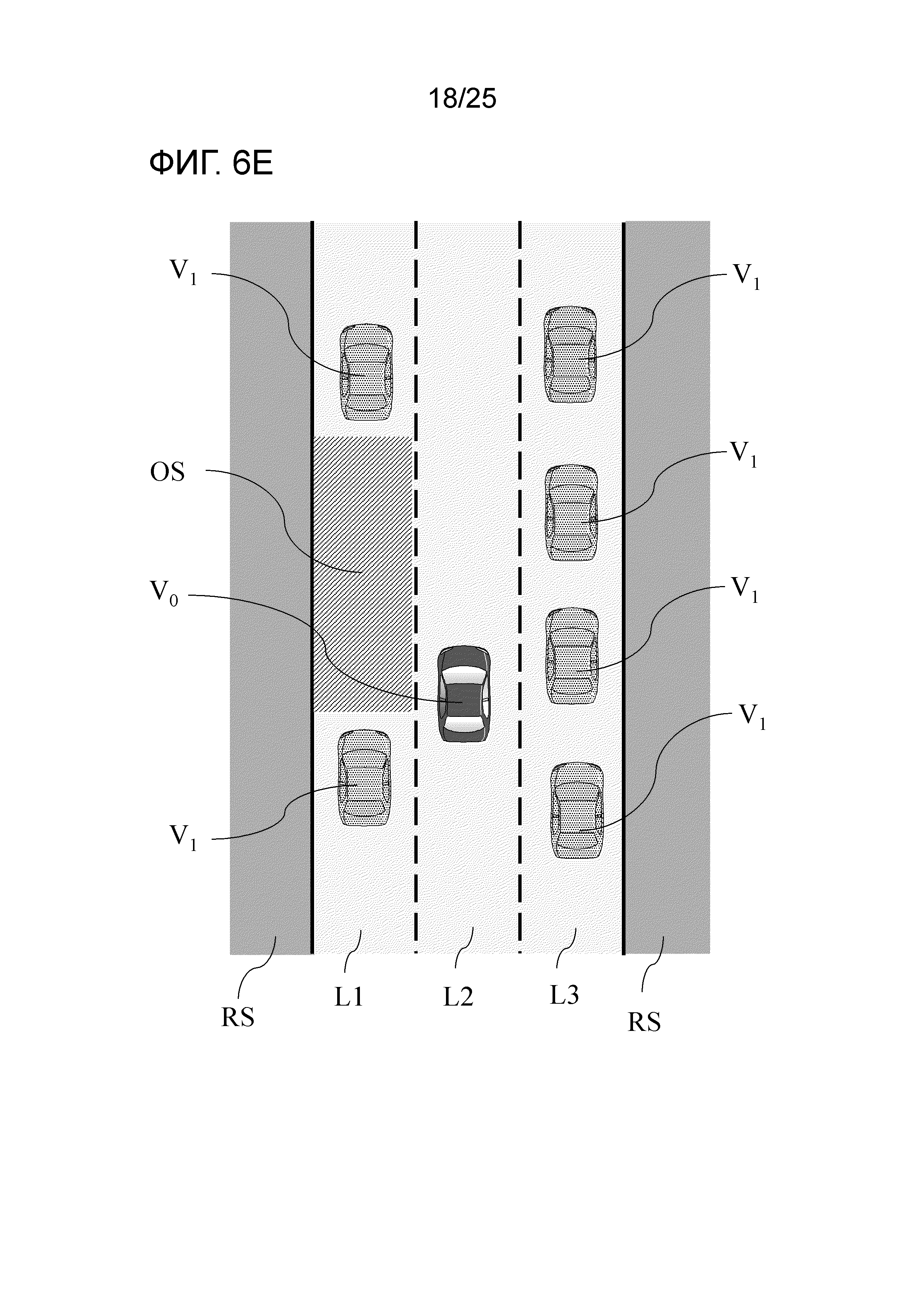
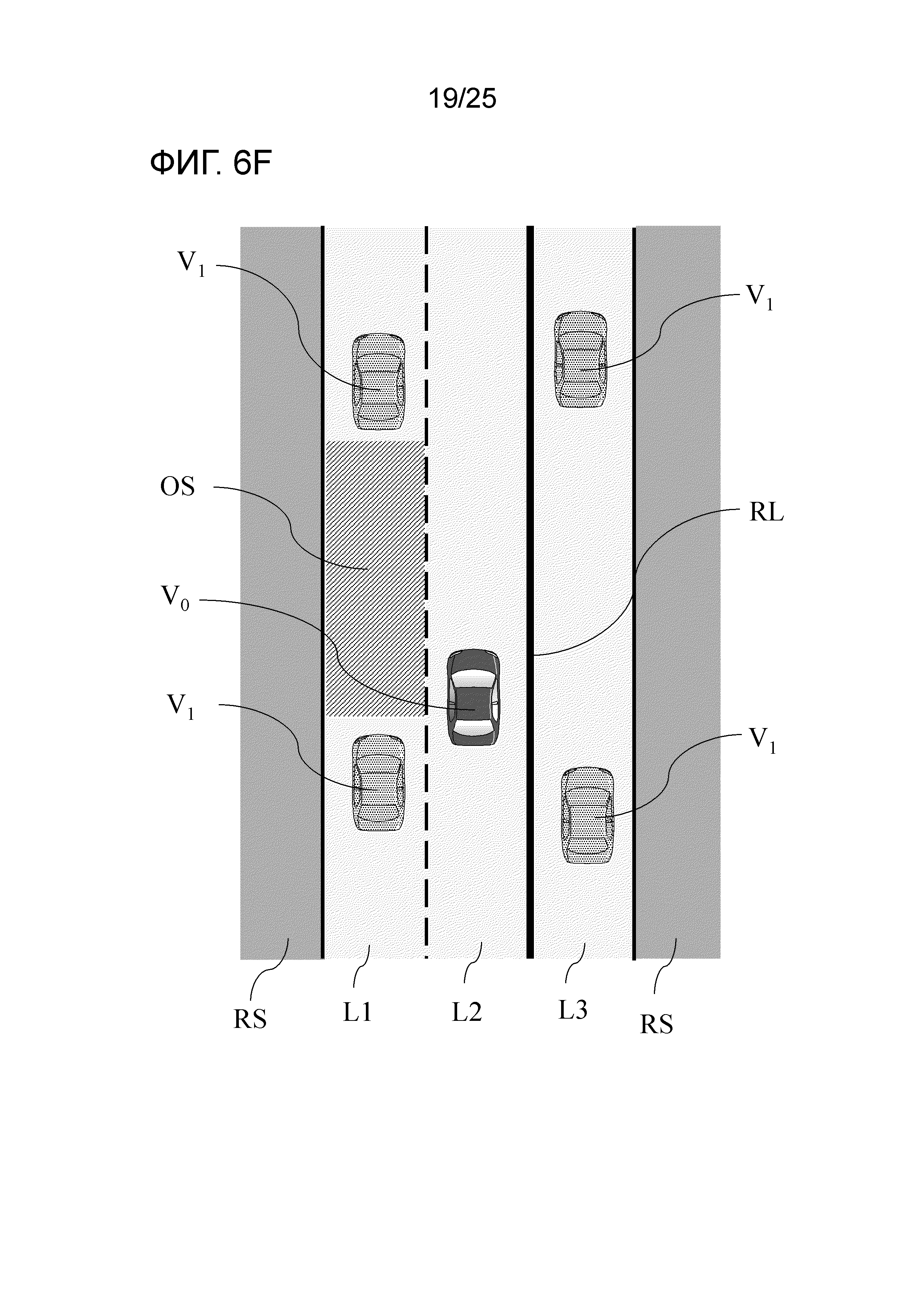
[0066] «Расстояния до объектов» в одном или более вариантах осуществления настоящего изобретения относятся к относительным расстояниям с учётом положения движения, в котором рассматриваемое транспортное средство движется с текущей скоростью; поэтому, если другое транспортное средство, присутствующее в окружении рассматриваемого транспортного средства, движется прямо вперед с той же скоростью, что и рассматриваемое транспортное средство, расстояние до объекта не изменяется. «Бок рассматриваемого транспортного средства» относится к расстоянию, в котором положение сбоку от рассматриваемого транспортного средства может быть принято в качестве целевого положения для смены полосы движения, когда рассматриваемое транспортное средство меняет полосу движения (это целевое положение также является относительным положением с учётом положения движения, когда рассматриваемое транспортное средство движется с текущей скоростью), и это расстояние (например, направление, размер и угол) может быть установлено надлежащим образом. Способы обнаружения расстояний OS до объектов будут описаны ниже с обращением к Фиг. 6А - Фиг. 6F. Фиг. 6A-6F - виды в плане для пояснения расстояний OS до объектов.
[0067] На примере ситуации, проиллюстрированной на Фиг. 6A, другое транспортное средство V1, которое представляет собой препятствие, не присутствует ни в левой, ни в правой смежных полосах L1, L3 движения, соответственно, смежных с полосой L2 движения, по которой движется рассматриваемое транспортное средство V0. В этом случае устройство 19 управления использует функцию управления сменой полосы движения для обнаружения соседних полос L1 и L3 движения в качестве расстояний OS до объектов. Следует отметить, что обочины RS дороги исключены из расстояний OS до объектов, поскольку обочины RS дороги в основном находятся в пределах расстояний, в которых смена полосы движения невозможна. Однако следует отметить, что, если ситуация движения рассматриваемого транспортного средства V0 является «ситуацией экстренной эвакуации» на дороге, на которой разрешена аварийная остановка и тому подобное на обочинах RS дороги, обочины RS дороги могут быть включены в расстояния OS до объектов (здесь и далее).
[0068] На примере ситуации, проиллюстрированной на Фиг. 6B, другое транспортное средство V1 не присутствует в левой смежной полосе L1 движения, смежной с полосой L2 движения, по которой движется рассматриваемое транспортное средство V0, но другие транспортные средства V1 и V1, которые являются препятствиями, присутствуют в правой смежной полосе L3 движения. Однако в смежной полосе L3 движения между передним другим транспортным средством V1, движущимся впереди пространства, смежного с полосой L2 движения, в котором движется рассматриваемое транспортное средство V0, и задним другим транспортным средством V1, движущимся за этим пространством имеется расстояние, в пределах которого нет других транспортных средств. Устройство 19 управления использует функцию управления сменой полосы движения для обнаружения в качестве расстояний OS до объектов левой смежной полосы L1 движения и расстояние до правой смежной полосы L3 движения, в которой нет других транспортных средств.
[0069] На примере ситуации, проиллюстрированной на Фиг. 6C, расстояние, в пределах которого нет других транспортных средств, имеется в правой смежной полосе L3 движения, как и в примере, проиллюстрированном на Фиг. 6B, и в левой смежной полосе L1 движения между передним другим транспортным средством V1 и задним другим транспортным средством V1 также имеется расстояние, в пределах которого нет других транспортных средств. В этом случае устройство 19 управления использует функцию управления сменой полосы движения для обнаружения в качестве расстояний OS до объектов расстояния в левой смежной полосе L1 движения, в которой нет других транспортных средств, и расстояния в правой смежной полосе L3 движения, в которой нет других транспортных средств.
[0070] На примере ситуации, проиллюстрированной на Фиг. 6D, расстояние, в пределах которого нет других транспортных средств, имеется в левой смежной полосе L1 движения, как и в примере, проиллюстрированном на Фиг. 6C, и в правой смежной полосе L3 движения нет других транспортных средств, но смежная полоса L3 включает в себя расстояние RA, такое как участок ремонтных работ или пространство, занятое поврежденным транспортным средством, в котором не может двигаться рассматриваемое транспортное средство V0. В этом случае устройство 19 управления использует функцию управления сменой полосы движения для обнаружения расстояний OS до объектов, исключая расстояние RA, такое как участок ремонтных работ или пространство, занятое поврежденным транспортным средством, в котором не может двигаться рассматриваемое транспортное средство V0, из расстояний OS до объектов. Кроме участка ремонтных работ, примеры расстояния RA, в котором не может двигаться рассматриваемое транспортное средство V0, включают в себя расстояние, в пределах которого другое транспортное средство V1 паркуется или останавливается, и расстояние, в пределах которого запрещено движение транспортных средств согласно правилам дорожного движения и тому подобному. Как проиллюстрировано на Фиг. 6D, если расстояние RA, в пределах которого рассматриваемое транспортное средство V0 не может двигаться из-за участка ремонтных работ или тому подобного, занимает, например, половину или более смежной полосы L3 движения (половина или более в направлении ширины дороги), оставшееся расстояние менее половины может быть исключено из расстояния OS до объектов.
[0071] На примере ситуации, проиллюстрированной на Фиг. 6E, расстояние, в пределах которого нет других транспортных средств, имеется в левой смежной полосе L1 движения, но в правой смежной полосе L3 движения друг за другом движутся другие транспортные средства V1, а смежная полоса L3 движения не включает в себя пространство, в которое возможна смена полосы движения. В этом случае устройство 19 управления использует функцию управления сменой полосы движения для определения, что расстояния OS до объектов не могут быть обнаружены в правой смежной полосе L3 движения.
[0072] На примере ситуации, проиллюстрированной на Фиг. 6F, смена полосы движения со смежной полосы L2 движения на следующую смежную полосу L3 движения запрещена разметкой RL, указывающей на запрет на смену полосы движения. На такой дороге устройство 19 управления использует функцию управления сменой полосы движения для определения, что расстояния OS до объектов не могут быть обнаружены в правой смежной полосе L3 движения.
[0073] Устройство 19 управления в одном или более вариантах осуществления настоящего изобретения использует функцию управления сменой полосы движения для обнаружения расстояний OS до объектов в направлении, из правого и левого направлений, которое подходит для смены полосы движения в данной ситуации рассматриваемого транспортного средства V0. В одном или более вариантах осуществления настоящего изобретения направление, подходящее для смены полосы движения в каждой ситуации движения, заранее сохранено в таблице, проиллюстрированной на Фиг. 2. Устройство 19 управления использует функцию управления сменой полосы движения для обращения к таблице, проиллюстрированной на Фиг. 2, для получения информации о «направлении смены полосы движения» в данной ситуации движения рассматриваемого транспортного средства. Например, если ситуация движения рассматриваемого транспортного средства представляет собой «ситуацию обгона движущегося впереди транспортного средства», устройство 19 управления использует функцию управления сменой полосы движения для обращения к таблице по Фиг. 2 для определения направления «в сторону полосы движения для обгона» в качестве «направления смены полосы движения». Затем устройство 19 управления использует функцию управления сменой полосы движения для обнаружения расстояний OS до объектов в полученном «направлении смены полосы движения».
[0074] В качестве дополнения или альтернативы, устройство 19 управления использует функцию управления сменой полосы движения для обнаружения расстояния OS до объекта сбоку от рассматриваемого транспортного средства V0. Например, даже если в левой смежной полосе L1 движения и в правой смежной полосе L3 движения обнаружены расстояния, в пределах которых нет препятствий, если данные расстояния отделены от текущего положения рассматриваемого транспортного средства V0 определенным расстоянием или более и расположены сзади или впереди рассматриваемого транспортного средства, может быть трудно сменить полосу движения в такие расстояния, которые, таким образом, не обнаруживаются в качестве расстояний OS до объектов.
[0075] Обращаясь вновь к фиг. 5A, на этапе S5 устройство 19 управления использует функцию управления сменой полосы движения для установления целевого положения для смены полосы движения. ФИГ. 7 - схема для описания способа установления целевого положения для смены полосы движения. Например, как проиллюстрировано на Фиг. 7, устройство 19 управления использует функцию управления сменой полосы движения для установления положения, которое находится в пределах расстояния OS до объекта в правой смежной полосе L3 движения, обнаруженного на этапе S4, и которое смещено назад от положения рассматриваемого транспортного средства V0 на небольшое расстояние, в качестве целевого положения для смены полосы движения (например, положение транспортного средства V01, проиллюстрированное на Фиг. 7). Целевое положение для смены полосы движения (положение транспортного средства V01) представляет собой относительные положения по отношению к положению, в котором движется рассматриваемое транспортное средство V0. То есть при условии, что положение, в котором рассматриваемое транспортное средство V0 движется с текущей скоростью без изменения скорости, является опорным положением, положения, расположенные в боковом направлении сзади опорного положения на небольшом расстоянии устанавливаются в качестве целевого положения для смены полосы движения. Это позволяет рассматриваемому транспортному средству V0 менять полосу движения на правую смежную полосу L3 движения без ускорения рассматриваемого транспортного средства V0, когда рассматриваемое транспортное средство V0 перемещается в целевое положение для смены полосы движения.
[0076] Устройство 19 управления может использовать функцию управления сменой полосы движения для установления целевого положения для смены полосы движения, принимая во внимание простоту смены полосы движения, например, в ситуации, когда расстояния OS до объектов в правой смежной полосе L3 движения включают в себя расстояние, в которое может переместиться рассматриваемое транспортное средство V0, и в ситуации, когда другое транспортное средство V1, которое может войти в пределы расстояния OS до объекта, не присутствует в окружении рассматриваемого транспортного средства V0. Например, если другое транспортное средство V1, присутствующее вокруг расстояния OS до объекта, зажигает указатели поворота в направлении расстояния OS до объекта и/или движется, смещаясь в сторону расстояния OS до объекта, функция управления сменой полосы движения используется для определения того, что другое транспортное средство V1 может войти в пределы расстояния OS до объекта. В этом случае в качестве целевого положения может быть установлено другое положение в пределах расстояния OS до объекта, в которое другое транспортное средство V1 войдет с меньшей вероятностью. В приведенном выше примерном случае целевое положение для смены полосы движения устанавливается в положения, расположенные сзади рассматриваемого транспортного средства V0 и в пределах расстояния OS до объекта в смежной полосе L3 движения. В альтернативном варианте осуществления, целевое положение для смены полосы движения может быть установлено в положения, расположенные впереди рассматриваемого транспортного средства V0 и в пределах расстояния OS до объекта в смежной полосе L3 движения. В альтернативном варианте осуществления этап S5 может включать в себя установление целевого маршрута для выполнения смены полосы движения вместо установления целевого положения для смены полосы движения.
[0077] Обращаясь вновь к Фиг. 5A, на этапе S6 устройство 19 управления использует функцию управления сменой полосы движения для оценки требуемого времени T1 для смены полосы движения. Например, устройство 19 управления использует функцию управления сменой полосы движения для оценки времени, необходимого для того, чтобы рассматриваемое транспортное средство переместилось из текущего положения в целевое положение для смены полосы движения, в качестве требуемого времени T1 на основании скорости транспортного средства и/или ускорения рассматриваемого транспортного средства. Соответственно, если ширина полосы движения велика, если на дороге имеется затор, или если выполняются последовательные смены полосы движения, как, например, в этом примере, требуемое время T1 оценивается как долгое время.
[0078] На этапе S7 устройство 19 управления использует функцию управления сменой полосы движения для оценки расстояния OS до объекта после требуемого времени T1, оцененного на этапе S6. В частности, устройство 19 управления использует функцию управления сменой полосы движения для оценки положения движения после требуемого времени T1 для другого транспортного средства V1, присутствующего в окружении рассматриваемого транспортного средства V0, на основании скорости транспортного средства и ускорения другого транспортного средства V1. Например, устройство 19 управления использует функцию управления сменой полосы движения для многократного обнаружения информации о положении другого транспортного средства V1, тем самым вычисляя вектор v0 скорости, вектор a0 ускорения и вектор p0 положения другого транспортного средства V1, как проиллюстрировано на Фиг. 8А.
[0079] Как проиллюстрировано на Фиг. 8A, когда направление движения рассматриваемого транспортного средства V0 находится вдоль оси X, а направление ширины дороги - вдоль оси Y, вектор v0 скорости другого транспортного средства V1 представлен следующим уравнением (1).
v0=vx0i+vy0j (1)
В приведенном выше уравнении (1) vx0 представляет компонент скорости в направлении оси X вектора v0 скорости другого транспортного средства V1, а vy0 представляет компонент скорости в направлении оси Y вектора v0 скорости другого транспортного средства V1. В приведенном выше уравнении (1) i представляет единичный вектор в направлении оси X, а j представляет единичный вектор в направлении оси Y (то же самое относится к следующим уравнениям (2), (3) и (6)).
[0080] Вектор a0 ускорения другого транспортного средства V1 может быть получен, как представлено следующим уравнением (2), в то время как вектор p0 положения другого транспортного средства V1 может быть получен, как представлено следующим уравнением (3).
a0=ax0i+ay0j (2)
p0=px0i+py0j (3)
В приведенном выше уравнении (2) ax0 представляет компонент ускорения в направлении оси X вектора a0 ускорения другого транспортного средства V1, а ay0 представляет компонент ускорения в направлении оси Y вектора a0 ускорения другого транспортного средства V1. В приведенном выше уравнении (3) px0 представляет компонент положения в направлении оси X вектора p0 положения другого транспортного средства V1, а py0 представляет компонент положения в направлении оси Y вектора p0 положения другого транспортного средства V1.
[0081] Затем устройство 19 управления использует функцию управления сменой полосы движения для вычисления вектора pT1 положения после требуемого времени T1 для другого транспортного средства V1, как проиллюстрировано на Фиг. 8B. В частности, устройство 19 управления использует функцию управления сменой полосы движения для вычисления вектора pT1 положения после требуемого времени T1 для другого транспортного средства V1 на основании следующих уравнений (4) - (6).
pxT1=px0+vx0T1+1/2 (ax0T1)2 (4)
pyT1=py0+vy0T1+1/2 (ay0T1)2(5)
pT1=pxT1i+pyT1j (6)
В приведенных выше уравнениях (4) и (5) pxT1 представляет компонент положения в направлении оси X вектора pT1 положения после требуемого времени T1 для другого транспортного средства V1, pyT1 представляет компонент положения в направлении оси Y вектора pT1 положения после требуемого времени T1 для другого транспортного средства V1, vx0T1 представляет скорость движения в направлении оси X другого транспортного средства V1 после требуемого времени T1, vy0T1 представляет скорость движения в направлении оси Y другого транспортного средства V1 после требуемого времени T1, ax0T1 представляет ускорение в направлении оси X другого транспортного средства V1 после требуемого времени T1, а ay0T1 представляет ускорение в направлении оси Y другого транспортного средства V1 после требуемого времени T1.
[0082] Устройство 19 управления использует функцию управления сменой полосы движения для оценки положений после требуемого времени T1 для всех других транспортных средств V1, присутствующих вокруг рассматриваемого транспортного средства V0. Затем устройство 19 управления использует функцию управления сменой полосы движения для оценки расстояния OS до объекта после требуемого времени T1 на основании положений после требуемого времени T1 для других транспортных средств V1. Устройство 19 управления использует функцию управления сменой полосы движения для оценки расстояния OS до объекта после требуемого времени T1 с учётом ситуации регулирования полосы движения после требуемого времени T1, наличие препятствий на дороге, наличие или отсутствие препятствия в смежной полосе L3 движения и наличие участка, например участка ремонтных работ, в который не может переместиться рассматриваемое транспортное средство. Устройство 19 управления может использовать функцию управления сменой полосы движения для оценки расстояния OS до объекта после требуемого времени T1, как на этапе S4.
[0083] На этапе S8 устройство 19 управления использует функцию управления сменой полосы движения для получения информации о требуемом расстоянии RR. Требуемое расстояние RR относится к расстоянию, имеющему величину, необходимую для того, чтобы рассматриваемое транспортное средство V0 сменило полосу движения, или расстоянию, имеющему величину, которая по меньшей мере равна или больше величины, которую рассматриваемое транспортное средство V0 занимает на поверхности дороги. В одном или более вариантах осуществления настоящего изобретения, когда требуемое расстояние RR установлено в целевом положении для смены полосы движения, а расстояние OS до объекта в смежной полосе L3 движения включает в себя требуемое расстояние RR, выполняется определение, что в пределах расстояния OS до объекта в смежной полосе L3 движения имеется пространство, соответствующее требуемому расстоянию RR, и изменение полосы движения на смежную полосу L3 движения разрешено. В одном или более вариантах осуществления настоящего изобретения в памяти устройства 19 управления сохранена информация, включающая в себя форму и величину требуемого расстояния RR, а функция управления сменой полосы движения используется для получения информации о требуемом расстоянии RR из памяти устройства 19 управления.
[0084] На этапе S9 устройство 19 управления использует функцию управления сменой полосы движения для определения, имеется ли пространство в пределах расстояния OS до объекта в смежной полосе L3 движения после требуемого времени T1. Пространство соответствует требуемому расстоянию RR, полученному на этапе S8. Расстояние OS до объекта в каждой из смежной полосы L2 движения и следующей смежной полосы L3 движения после требуемого времени T1 оценивается на этапе S7. В частности, как проиллюстрировано на Фиг. 9A, устройство 19 управления использует функцию управления сменой полосы движения, чтобы установить требуемое расстояние RR в целевом положении для смены полосы движения (положении рассматриваемого транспортного средства V0), которое установлено на этапе S5. Затем устройство 19 управления использует функцию управления сменой полосы движения для определения, включает ли в себя расстояние OS до объекта в смежной полосе L3 движения после требуемого времени T1 требуемое расстояние RR.
[0085] Например, в примере, проиллюстрированном на Фиг. 9A, расстояние OS до объекта в смежной полосе L3 движения после требуемого времени T1 не включает в себя задний участок требуемого расстояния RR. Таким образом, устройство 19 управления использует функцию управления сменой полосы движения для определения того, что в пределах расстояния OS до объекта в смежной полосе L3 движения после требуемого времени T1 отсутствует пространство, соответствующее требуемому расстоянию RR. С другой стороны, как проиллюстрировано на Фиг. 9B, когда расстояние OS до объекта в смежной полосе L3 движения после требуемого времени T1 включает в себя требуемое расстояние RR, устройство 19 управления использует функцию управления сменой полосы движения для определения, что в пределах расстояния OS до объекта в смежной полосе L3 движения после требуемого времени T1 имеется пространство, соответствующее требуемому расстоянию RR. Если в пределах расстояния OS до объекта в смежной полосе L3 движения после требуемого времени T1 имеется пространство, соответствующее требуемому расстоянию RR, процесс переходит к этапу S11, проиллюстрированному на Фиг. 5B, в то время как при отсутствии пространства процесс переходит к этапу S10.
[0086] На этапе S10 было выполнено определение, что расстояние OS до объекта в смежной полосе L3 движения после требуемого времени T1 не включает в себя требуемое расстояние RR, и не может быть обнаружено пространство, которое соответствует требуемому расстоянию RR, в пределах расстояния OS до объекта в смежной полосе L3 движения после необходимого времени T1. Следовательно, на этапе S10 устройство 19 управления использует функцию управления сменой полосы движения, чтобы изменить целевое положение для смены полосы движения. В частности, устройство 19 управления использует функцию управления сменой полосы движения для повторного установления целевого положения для смены полосы движения таким образом, чтобы расстояние OS до объекта в смежной полосе L3 движения после требуемого времени T1 включало в себя требуемое расстояние RR. Например, если задний участок требуемого расстояния RR не включен в расстояние OS до объекта в смежной полосе L3 движения после требуемого времени T1, как проиллюстрировано на Фиг. 9A, целевое положение для смены полосы движения смещается вперед. Это позволяет включить требуемое расстояние RR в расстояние OS до объекта в смежной полосе L3 движения после требуемого времени T1, как проиллюстрировано на Фиг. 9B, и определяется, что может быть обнаружено пространство, которое соответствует требуемому расстоянию RR, в пределах расстояния OS до объекта в смежной полосе L3 движения после требуемого времени T1. За этапом S10 следует этап S6, с которого снова выполняется обнаружение расстояний OS до объектов и тому подобное.
[0087] С другой стороны, если на этапе S9 по Фиг. 5A определено, что расстояние OS до объекта в смежной полосе L3 движения после требуемого времени T1 включает в себя требуемое расстояние RR, процесс переходит к этапу S11, проиллюстрированному на Фиг. 5B. На этапе S11 по Фиг. 5B устройство 19 управления использует функцию управления сменой полосы движения для выполнения процесса запроса согласия в отношении управления первой сменой полосы движения. На этапе S11 устройство 19 управления определило ситуацию, в которой управление сменой полосы движения с полосы L2 движения на полосу L3 движения возможно посредством процессов по этапам S1 - S9; поэтому перед фактическим выполнением смены полосы движения устройство 19 управления запрашивает у водителя ответ в отношении того, согласен ли он с выполнением управления сменой полосы движения, чтобы побудить водителя самостоятельно подтвердить безопасность. Это соответствует представлению первой информации управления движением согласно настоящему изобретению.
[0088] Фиг. 5D - это блок-схема, показывающая подпроцедуру процесса запроса согласия в отношении управления сменой полосы движения, выполняемого на S11. На этапе S111 по Фиг. 5D устройство 19 управления использует функцию представления информации управления движением для считывания формы ввода предыдущего ввода согласия. Форма ввода предыдущего ввода согласия представляет собой форму ввода, сохраненную на этапе S116 из в предыдущих подпроцедурах. Здесь предполагается, что форма ввода для предыдущего ввода согласия представляет собой вторую информацию управления движением по правым схемам на Фиг. 4А - Фиг. 4Е.
[0089] На этапе S112 устройство 19 управления использует функцию определения степени срочности для определения, является ли степень срочности ввода согласия от водителя равной или большей, чем заданное пороговое значение. Как описано выше, устройство 19 управления определяет, что степень срочности выше, и процесс переходит к этапу S114, когда расстояние до съезда на развязку, въезда в зону обслуживания или выезда с автострады является коротким и не имеется достаточно времени для переключения управления движением транспортного средства, или в условиях, в которых точность обнаружения окружения транспортного средства датчиком 11 часто является низкой, например в плохую погоду, и надежность автономного управления движением посредством устройства 1 управления движением транспортного средства падает ниже определенного порогового значения. На этапе S114 форма ввода для текущего ввода согласия устанавливается в ту же форму, что и форма ввода для предыдущего ввода согласия. Таким образом, в этом примере устройство 15 представления представляет вторую информацию управления движением, описанную с обращением к соответствующим правым схемам на Фиг. 4А – Фиг. 4Е. На этапе S116 устройство 19 управления сохраняет форму ввода для текущего ввода согласия.
[0090] С другой стороны, когда на этапе S113 определяется, что степень срочности ввода согласия ниже заданного порогового значения, процесс переходит к этапу S115, и устройство 19 управления устанавливает ввод форму ввода для текущего ввода согласия в форму ввода, отличную от формы ввода для предыдущего ввода согласия. То есть в этом примере устройство 15 представления представляет первую информацию управления движением, описанную с обращением к соответствующим левым схемам на Фиг. 4А – Фиг. 4Е.
[0091] В примере по Фиг. 4A перед началом смены полосы движения с центральной полосы L2 движения на крайнюю правую полосу L3 движения, как проиллюстрировано на Фиг. 3, устройство 19 управления использует функцию представления информации управления движением для управления отображением устройства 15 представления для отображения, как проиллюстрировано на левой схеме Фиг. 4A, рассматриваемого транспортного средства V0 и данных изображения вида вперёд, включая полосы L1, L2 и L3 движения, вместе с целью смены полосы движения рассматриваемого транспортного средства V0 и кнопкой OK, которая представляет собой первый блок 151 ввода. Цель смены полосы движения рассматриваемого транспортного средства V0 отображается посредством визуального образа, такого как стрелка. Кроме того, вместе с этим отображением из громкоговорителя выводятся голосовые данные, например: «Вы согласны со сменой полосы движения? Если Вы согласны со сменой полосы движения, пожалуйста прикоснитесь к кнопке ОК».
[0092] В примере по Фиг. 4B перед началом смены полосы движения с центральной полосы L2 движения на крайнюю правую полосу L3 движения устройство 19 управления управляет отображением устройства 15 представления для отображения, как проиллюстрировано на левой схеме Фиг. 4B, рассматриваемого транспортного средства V0 и данных изображения вида вперёд, включая полосы L1, L2 и L3 движения вместе с целью смены полосы движения рассматриваемого транспортного средства V0, кнопкой OK, которая представляет собой первый блок 151 ввода, и кнопкой NG, которая представляет собой второй блок 152 ввода. Цель смены полосы движения рассматриваемого транспортного средства V0 отображается посредством визуального образа, такого как стрелка. Кроме того, вместе с этим отображением из динамика выводятся голосовые данные, например: «Вы согласны со сменой полосы движения? Если Вы согласны со сменой полосы движения, пожалуйста прикоснитесь к кнопке ОК».
[0093] В примере по Фиг. 4C перед началом смены полосы движения с центральной полосы L2 движения на крайнюю правую полосу L3 движения устройство 19 управления управляет отображением устройства 15 представления для отображения, как проиллюстрировано на левой схеме Фиг. 4C, рассматриваемого транспортного средства V0 и данных изображения вида вперёд, включая полосы L1, L2 и L3 движения, вместе с целью смены полосы движения рассматриваемого транспортного средства V0, кнопкой
[0094] В примере по Фиг. 4D перед началом смены полосы движения с центральной полосы L2 движения на крайнюю правую полосу L3 движения устройство 19 управления управляет отображением устройства 15 представления для отображения, как проиллюстрировано на левой схеме Фиг. 4D, рассматриваемого транспортного средства V0 и данных изображения вида вперёд, включая полосы L1, L2 и L3 движения вместе с целью смены полосы движения рассматриваемого транспортного средства V0 и множеством кнопок
[0095] В примере по Фиг. 4E перед началом смены полосы движения с центральной полосы L2 движения на крайнюю правую полосу L3 движения устройство 19 управления управляет отображением устройства 15 представления для отображения, как проиллюстрировано на левой схеме Фиг. 4E, рассматриваемого транспортного средства V0 и данных изображения вида вперёд, включая полосы L1, L2 и L3 движения, вместе с целью смены полосы движения рассматриваемого транспортного средства V0, которая отображается посредством визуального образа, такого как стрелка. Кроме того, вместе с этим отображением из громкоговорителя выводятся голосовые данные, например: «Вы согласны со сменой полосы движения? Если Вы согласны со сменой полосы движения, пожалуйста прикоснитесь к кнопке на рулевом управлении».
[0096] Возвращаясь к Фиг. 5B, на этапе S12 устройство 19 управления определяет, согласен ли водитель со сменой полосы движения с полосы L2 движения на полосу L3 движения в ответ на запрос согласия по этапу S11. Это будет описано более конкретно. В ответ на первую информацию управления движением, проиллюстрированную на левой схеме Фиг. 4A, водитель самостоятельно визуально проверяет окружающую обстановку и тому подобное, и в случае принятия решения о согласии со сменой полосы движения или в других подобных случаях водитель прикасается к кнопке ОК, чтобы указать на намерение водителя согласиться со сменой полосы движения с полосы L2 движения на полосу L3 движения. Аналогичным образом, в ответ на первую информацию управления движением, проиллюстрированную на левой схеме Фиг. 4B, водитель самостоятельно визуально проверяет окружающую обстановку и тому подобное, и в случае принятия решения о согласии со сменой полосы движения или в других подобных случаях водитель прикасается к кнопке OK, чтобы указать на намерение водителя согласиться со сменой полосы движения с полосы L2 движения на полосу L3 движения. Аналогичным образом, в ответ на первую информацию управления движением, проиллюстрированную на левой схеме Фиг. 4C, водитель самостоятельно визуально проверяет окружающую обстановку и тому подобное, и в случае принятия решения о согласии со сменой полосы движения или в других подобных случаях водитель прикасается к кнопке
[0097] Аналогичным образом, в ответ на первую информацию управления движением, проиллюстрированную на левой схеме Фиг. 4D, водитель самостоятельно визуально проверяет окружающую обстановку и тому подобное, и в случае принятия решения о согласии со сменой полосы движения или в других подобных случаях водитель прикасается к кнопке
[0098] На этапе S13 устройство 19 управления использует функцию управления сменой полосы движения для получения ограничения Z по времени для смены полосы движения. В одном или более вариантах осуществления настоящего изобретения, как проиллюстрировано на Фиг. 2, в таблице в качестве ограничения Z по времени сохраняется время, в течение которого рассматриваемое транспортное средство приближается к точке, в которой смена полосы движения затруднена, в каждой ситуации движения. Устройство 19 управления использует функцию управления сменой полосы движения для обращения к таблице, проиллюстрированной на Фиг. 2, для получения ограничения Z по времени в ситуации движения рассматриваемого транспортного средства. Например, в «ситуации сближения с движущимся впереди транспортным средством» среди примеров, проиллюстрированных на Фиг. 2, ограничение по времени сохраняется как (время достижения движущегося впереди транспортного средства - α) секунд. В этом случае устройство 19 управления использует функцию управления движением для обращения к таблице, проиллюстрированной на Фиг. 2, для вычисления времени, необходимого для достижения движущегося впереди транспортного средства, и получения (вычисленного времени для достижения движущегося впереди транспортного средства - α) секунд в качестве ограничения Z по времени. Постоянная величина α составляет несколько секунд (например, 5 секунд) и может быть установлена для каждой ситуации движения по мере необходимости. Например, если время для достижения движущегося впереди транспортного средства составляет 30 секунд, а α равна 5 секундам, ограничение Z по времени для смены полосы движения составляет 25 секунд.
[0099] На этапе S14 выполняется процесс запуска для управления сменой полосы движения. В процессе запуска для управления сменой полосы движения устройство 19 управления использует функцию управления сменой полосы движения для установления момента L времени запуска, в который запускается автономное управление сменой полосы движения. Способ установления момента L времени запуска не ограничен конкретно, и момент времени L запуска может быть установлен, например, любым из следующих способов (1) - (8), описанных ниже. То есть (1) уникальный момент времени устанавливается в качестве момента L времени запуска для управления сменой полосы движения. Например, момент времени после истечения заданного времени (например, 6 секунд) с момента согласия водителя со сменой полосы движения, устанавливается в качестве момента L времени запуска для управления сменой полосы движения. (2) Момент L времени запуска для управления сменой полосы движения устанавливается на основании уровня необходимости смены полосы движения, проиллюстрированного на Фиг. 2. В частности, уровень необходимости смены полосы движения в ситуации движения рассматриваемого транспортного средства получается из таблицы, проиллюстрированной на Фиг. 2, и если уровень необходимости смены полосы движения не ниже заданного значения, момент L времени запуска для управления сменой полосы движения устанавливается в более ранний момент времени, чем в случае, если уровень необходимости смены полосы движения ниже заданного значения. (3) Момент L времени запуска для управления сменой полосы движения устанавливается на основании ограничения Z по времени для смены полосы движения, проиллюстрированного на Фиг.2. В частности, ограничение Z по времени для смены полосы движения в ситуации движения рассматриваемого транспортного средства получается из таблицы, проиллюстрированной на Фиг. 2, и если ограничение Z по времени для смены полосы движения меньше заданного времени Zth, момент L времени запуска для управления сменой полосы движения устанавливается в более ранний момент времени, чем в случае, если ограничение Z по времени для смены полосы движения не меньше заданного времени Zth. (4) Момент L времени запуска для управления сменой полосы движения устанавливается на основании требуемого времени T1 для смены полосы движения. В частности, когда требуемое время T1 для смены полосы движения, оцененное на этапе S6 по Фиг. 5A, меньше заданного времени Tth, момент L времени запуска для управления сменой полосы движения устанавливается в более ранний момент времени, чем в случае, если требуемое время T1 для смены полосы движения не меньше заданного времени Tth.
[0100] (5) Момент L времени запуска для управления сменой полосы движения устанавливается на основании ограничения Z по времени и требуемого времени T1 для смены полосы движения. В частности, из требуемого времени T1 для смены полосы движения и ограничения Z по времени для смены полосы движения получают запасное время Y (например, ограничение Z по времени-требуемое время T1=запасное время Y), и если запасное время Y меньше заданного времени Yth, момент L времени запуска для управления сменой полосы движения устанавливается в более ранний момент времени, чем в случае, если запасное время Y не меньше заданного времени Yth. (6) Момент L времени запуска для управления сменой полосы движения устанавливается на основании уровня O внимания (уровня вовлеченности), который представляет степень участия водителя в управлении транспортным средством. Например, выполняется определение, ведет ли водитель разговор или осуществляет ли вызов в режиме громкой связи, путем обнаружения голоса водителя посредством устройства 16 ввода, такого как бортовой микрофон или устройство громкой связи, и если водитель ведет разговор или осуществляет вызов по громкой связи, определяется, что уровень O внимания водителя ниже порогового значения Oth, и момент L времени запуска для управления сменой полосы движения устанавливается в более поздний момент времени, чем в случае, если уровень O внимания водителя не меньше порогового значения Oth.
[0101] (7) Момент L времени запуска для управления сменой полосы движения устанавливается на основании уровня K затора движения. Например, уровень K затора движения определяется на основании расстояния до движущегося впереди транспортного средства, расстояния до движущегося сзади транспортного средства, количества окружающих транспортных средств, уровня заторов, содержащегося в информации VICS (зарегистрированный товарный знак), и/или степени отклонения между допустимой скоростью и фактической скоростью рассматриваемого транспортного средства, и уровень K затора движения определяется как тем более высокий, чем меньше расстояние до движущегося впереди транспортного средства, чем меньше расстояние до движущегося сзади транспортного средства, чем больше количество окружающих транспортных средств, чем выше уровень заторов, содержащийся в информации VICS, либо чем выше степень отклонения между допустимой скоростью и фактической скоростью транспортного средства. Если уровень K затора движения не ниже заданного значения Kth, момент L времени запуска для управления сменой полосы движения устанавливается в более ранний момент времени, чем в случае, если уровень K затора движения ниже заданного значения Kth. (8) Момент L времени запуска для управления сменой полосы движения устанавливается на основании вероятности B смены полосы движения. Например, степень, с которой можно гарантировать, что рассматриваемое транспортное средство сменит полосу движения, может быть получена как вероятность B на основании наличия или отсутствия установленного места назначения и/или расстояния до движущегося впереди транспортного средства. В частности, если место назначения установлено и необходимо сменить полосу движения, чтобы рассматриваемое транспортное средство достигло места назначения, определяется, что вероятность B смены полосы движения не ниже порогового значения Bth. В качестве дополнения или альтернативы, если расстояние до движущегося впереди транспортного средства меньше заданного расстояния, определяется, что водитель желает сменить полосу движения, и определяется, что вероятность B смены полосы движения не ниже порогового значения Bth. Затем, если вероятность B смены полосы движения не ниже порогового значения Bth, момент L времени запуска для управления сменой полосы движения устанавливается в более ранний момент времени, чем в случае, если вероятность B смены полосы движения ниже порогового значения Bth. Таким образом, момент L времени запуска для управления сменой полосы движения устанавливается, как указано выше. Вышеописанные (1) - (8) являются примерами способа установления момента L времени запуска, и способ не ограничен вышеизложенным. Кроме того, после установления момента L времени запуска устройство 19 управления может установить перед запуском управления сменой полосы движения момент P времени представления предварительного уведомления для представления информации о смене полосы движения, указывающей, что будет запущена смена полосы движения.
[0102] Когда установленный момент L времени запуска достигнут, устройство 19 управления использует функцию управления сменой полосы движения для запуска управления сменой полосы движения. В частности, устройство 19 управления использует функцию управления сменой полосы движения, чтобы позволить устройству 18 управления движением начать управление работой исполнительного механизма рулевого управления, чтобы рассматриваемое транспортное средство перемещалось в целевое положение для смены полосы движения, которое установлено на этапе S5 или этапе S10 по Фиг. 5А. После того, как управление сменой полосы движения запущено, устройство 15 представления может представить информацию смены полосы движения, указывающую, что выполняется управление сменой полосы движения.
[0103] На этапах S15 - S17 по Фиг. 5C, аналогично этапам S4 и S6-S7 на Фиг. 5A, обнаруживается текущее расстояние OS до объекта и расстояние OS до объекта после требуемого времени T2 для перемещения рассматриваемого транспортного средства V0 в целевое положение, относящееся к первой смене полосы движения (смена полосы движения с полосы L2 движения на полосу L3 движения по Фиг. 7). Затем на этапе S18 устройство 19 управления использует функцию управления сменой полосы движения для определения, имеется ли пространство в пределах расстояния OS до объекта в смежной полосе L3 движения после требуемого времени T2. Пространство соответствует требуемому расстоянию RR, полученному на этапе S8. Расстояние OS до объекта в каждой из смежной полосы L2 движения и следующей смежной полосы L3 движения после требуемого времени T2 оценивается на этапе S17. Затем устройство 19 управления использует функцию управления сменой полосы движения, чтобы установить требуемое расстояние RR в целевом положении для первой смены полосы движения. Если расстояние OS до объекта в смежной полосе L3 движения после требуемого времени T2 включает в себя требуемое расстояние RR, устройство 19 управления определяет, что имеется пространство, соответствующее требуемым расстояниям RR в пределах расстояния OS до объекта в смежной полосе L3 движения после требуемого времени T2, и процесс переходит к этапу S20. С другой стороны, если устройство 19 управления определяет, что в пределах расстояния OS до объекта в смежной полосе L3 движения после требуемого времени T2 не имеется пространство, соответствующее требуемому расстоянию RR, процесс переходит к этапу S19. Процесс этапа S19 и последующие процессы будут описаны ниже с обращением к Фиг. 5E.
[0104] На этапе S20 устройство 19 управления использует функцию управления сменой полосы движения, чтобы определить, истекло ли ограничение Z по времени, полученное на этапе S13, с момента запуска управления первой сменой полосы движения на этапе S14. Если время S1, прошедшее после запуска управления первой сменой полосы движения, превышает ограничение Z по времени , то есть если целевое положение для первой смены полосы движения не может быть достигнуто даже после истечения ограничения Z по времени с момента запуска управления сменой полосы движения, процесс переходит к этапу S22. На этапе S22 устройство 19 управления использует функцию управления сменой полосы движения для выполнения процесса прекращения управления первой сменой полосы движения. В частности, устройство 19 управления использует функцию управления сменой полосы движения, чтобы сообщить водителю информацию, указывающую, что управление сменой полосы движения будет прекращено. Например, устройство 19 управления управляет устройством 15 представления, чтобы представить водителю сообщение «Смена полосы движения будет прекращена из-за истечения времени», и затем завершит управление сменой полосы движения. В процессе прекращения управления сменой полосы движения устройство 19 управления может оставить положение движения рассматриваемого транспортного средства в направлении ширины дороги в положении, в котором завершено управление сменой полосы движения, или может также восстановить положение движения в положение при запуске управления сменой полосы движения. Если положение движения восстанавливается в положение, в котором было запущено управление сменой полосы движения, водителю может быть представлено сообщение, например «Исходное положение будет восстановлено из-за истечения времени».
[0105] С другой стороны, если на этапе S20 истекшее время S1 от запуска управления сменой полосы движения не превышает ограничение Z по времени, процесс переходит к этапу S21. На этапе S21 устройство 19 управления использует функцию управления сменой полосы движения, чтобы определить, достигло ли рассматриваемое транспортное средство целевого положения для первой смены полосы движения. Если рассматриваемое транспортное средство достигло целевого положения для первой смены полосы движения, процесс переходит к этапу S23. На этапе S23 управление первой сменой полосы движения завершается с использованием функции управления сменой полосы движения, и поэтому устройство 15 представления представляет информацию о смене полосы движения, указывающую, что первая смена полосы движения завершена. Если на этапе S21 определяется, что рассматриваемое транспортное средство не достигло целевого положения для первой смены полосы движения, процесс возвращается к этапу S15.
[0106] Если на этапе S18 по Фиг. 5C определяется, что в пределах расстояния OS до объекта в смежной полосе L3 движения после требуемого времени T2 не имеется пространство, соответствующее требуемому расстоянию RR, процесс переходит к этапу S19. То есть, если в момент времени этапа S9 запуска управления сменой полосы движения в пределах расстояния OS до объекта в смежной полосе L3 движения было пространство, соответствующее требуемому расстоянию RR, но после запуска управления первой сменой полосы движения в пределах расстояния OS до объекта в смежной полосе L3 движения нет пространства, соответствующего требуемому расстоянию RR, процесс переходит к этапу S19. На этапе S19 выполняется обнаружение взаимного расположения в направлении ширины дороги между рассматриваемым транспортным средством и разметкой полос движения, которую рассматриваемое транспортное средство пересекает при смене полосы движения (также называемой далее «объектной разметкой полосы движения»).
[0107] Например, Фиг. 10 иллюстрирует ситуации, в которых рассматриваемое транспортное средство V0 изменяет полосу движения в направлении, указанном стрелками на чертеже (смена полосы движения с левой полосы движения на правую полосу движения на чертеже). В этом случае устройство 19 управления использует функцию управления сменой полосы движения для определения любого из состояния, в котором никакая часть рассматриваемого транспортного средства V0 не пересекает объектную разметку CL полосы движения, как проиллюстрировано на Фиг. 10 (A), состояния, в котором часть рассматриваемого транспортного средства V0 пересекает объектную разметку CL полосы движения, но центральная линия VC рассматриваемого транспортного средства V0 не пересекает объектную разметку CL полосы движения, как проиллюстрировано на Фиг. 10 (B), состояния, в котором все транспортное средство V0 объекта не пересекает объектную разметку CL полосы движения, но центральная линия VC рассматриваемого транспортного средства V0 пересекает объектную разметку CL полосы движения, как проиллюстрировано на Фиг. 10 (C), и состояния, в котором все рассматриваемое транспортное средство V0 пересекает объектную разметку CL полосы движения, как проиллюстрировано на Фиг. 10 (D).
[0108] На этапе S51, проиллюстрированном на Фиг. 5E, устройство 19 управления использует функцию управления сменой полосы движения для выполнения процесса управления для прекращения или продолжения смены полосы движения на основании взаимного расположения в направлении ширины дороги между объектной разметкой CL полосы движения и рассматриваемым транспортным средством V0, определенного на этапе S19 по Фиг. 5С. В частности, устройство 19 управления использует функцию автономного управления сменой полосы движения для определения (а) способа представления информации водителю при прекращении или продолжении смены полосы движения, (b) управления после прекращения или продолжения смены полосы движения и (c) положения движения рассматриваемого транспортного средства V0 при прекращении или продолжении смены полосы движения на основании взаимного расположения в направлении ширины дороги между объектной разметкой CL полосы движения и рассматриваемым транспортным средством V0.
[0109] Например, устройство 19 управления использует функцию управления сменой полосы движения для выполнения любого из следующих четырех способов в качестве способа (а) представления информации водителю при прекращении или продолжении смены полосы движения: (a1) способа, который включает в себя представление информации, позволяющей водителю выбирать между вариантами прекращения и продолжения смены полосы движения без ограничения по времени, и, если водитель выбирает любой из вариантов, выполнение управления согласно варианту (прекращение или продолжение смены полосы движения), выбранному водителем; (a2) способа, который включает в себя представление информации, позволяющей водителю выбирать между вариантами прекращения движения и продолжения смены полосы движения с ограничением по времени, и, если водитель выбирает любой из вариантов в пределах ограничения по времени, выполнение управления согласно варианту (прекращение или продолжение смены полосы движения), выбранному водителем, или, если водитель не выбирает вариант в пределах ограничения по времени, выполнение управления (управление по умолчанию) согласно заданному варианту из вариантов прекращения и продолжения управления сменой полосы движения; (a3) способа, который включает в себя автономное выполнение прекращения или продолжения смены полосы движения и явное обеспечение водителю способа отмены прекращения или продолжения смены полосы движения, выполняемого автономно; и (a4) способа, который включает в себя автономное выполнение прекращения или продолжения смены полосы движения без явного обеспечения водителю способа отмены прекращения или продолжения смены полосы движения, выполняемого автономно.
[0110] В качестве дополнения или альтернативы, устройство 19 управления использует функцию управления сменой полосы движения для выполнения любой из следующих трех схем управления в качестве содержания (b) управления после прекращения или продолжения смены полосы движения: (b1) схемы, которая включает в себя прекращение смены полосы движения, а также прекращение автономного управления движением; (b2) схемы, которая включает в себя прекращение только управления сменой полосы движения и продолжение автономного управления движением; и (b3) схемы, которая включает в себя приостановку управления сменой полосы движения в состояние ожидания до тех пор, пока в пределах расстояния OS до объекта в смежной полосе L3 движения не будет вновь обнаружено пространство, соответствующее требуемому расстоянию RR, и возобновление управления сменой полосы движения, когда в пределах расстояния OS до объекта в соседней полосе L3 движения снова обнаружено пространство, соответствующее требуемому расстоянию RR.
[0111] В качестве дополнения или альтернативы, устройство 19 управления использует функцию управления сменой полосы движения для выполнения любой из следующих трех схем регулирования положения для положения (c) движения рассматриваемого транспортного средства при прекращении или продолжении управления сменой полосы движения: (c1) схемы, которая включает в себя восстановление положения рассматриваемого транспортного средства в исходное положение перед началом смены полосы движения; (c2) схемы, которая включает в себя перемещение рассматриваемого транспортного средства в положение вблизи объектной разметки CL полосы движения в полосе движения, по которой данное транспортное средство двигалось до начала смены полосы движения; и (c3) схемы, которая включает в себя сохранение текущего положения.
[0112] Устройство 19 управления использует функцию управления сменой полосы движения для выполнения процесса управления для прекращения или продолжения смены полосы движения путем надлежащего объединения двух или более из способа (а) представления информации водителю при прекращении или продолжении смены полосы движения, содержания (b) управления после прекращения или продолжения смены полосы движения и положения (c) движения рассматриваемого транспортного средства при прекращении или продолжении смены полосы движения на основании взаимного расположения в направлении ширины дороги между объектной разметкой CL полосы движения и рассматриваемым транспортным средством V0.
[0113] Например, если никакая часть рассматриваемого транспортного средства V0 не пересекает объектную разметку CL полосы движения, как проиллюстрировано на Фиг. 10 (A), устройство 19 управления может выполнять способ (a4), который включает в себя автономное выполнение прекращения смены полосы движения без явного обеспечения водителю способа отмены прекращения смены полосы движения. В этом случае устройство 19 управления может использовать функцию управления сменой полосы движения для выполнения схемы (b1), которая включает в себя прекращение смены полосы движения, а также прекращение автономного управления движением, и схемы (c1), которая включает в себя восстановление положения рассматриваемого транспортного средства в исходное положение перед началом смены полосы движения. В таком случае устройство 19 управления может сообщать водителю о том, что с этого момента будет выполнено управление для прекращения смены полосы движения, например: «Положение будет восстановлено в исходное положение, поскольку может быть недостаточно места для смены полосы движения» и «Автономное управление движением будет отменено после восстановления исходного положения». В этом случае процесс переходит к этапу S23 по Фиг. 5C для завершения управления сменой полосы движения.
[0114] Если часть рассматриваемого транспортного средства V0 пересекает объектную разметку CL полосы движения, но центральная линия VC рассматриваемого транспортного средства V0 не пересекает объектную разметку CL полосы движения, как проиллюстрировано на Фиг. 10 (B), устройство 19 управления может выполнять способ (a3), который включает в себя автономное выполнение прекращения смены полосы движения и явное обеспечение водителю способа отмены прекращения смены полосы движения. В этом случае устройство 19 управления может использовать функцию управления сменой полосы движения для выполнения схемы (c2), которая включает в себя перемещение рассматриваемого транспортного средства V0 в положение вблизи объектной разметки CL полосы движения в полосе движения, в которой рассматриваемое транспортное средство двигалось до начала смены полосы движения, и последующего выполнения схемы (b2), которая включает в себя прекращение только управления сменой полосы движения и продолжение автономного управления движением. В таком случае устройство 19 управления может объявлять водителю содержание управления, которое будет выполняться с этого момента для прекращения смены полосы движения, например, «Положение будет восстановлено в исходную полосу движения, поскольку может быть недостаточно места для смены полосы движения». и «Предыдущее автономное управление движением будет продолжено после возвращения в исходное положение». В качестве дополнения или альтернативы, устройство 19 управления может отображать сообщение «Пожалуйста, нажмите кнопку ниже, если смена полосы движения должна быть продолжена» вместе с кнопкой для продолжения смены полосы движения. Если водитель нажимает кнопку для продолжения смены полосы движения, процесс переходит к этапу S52 по Фиг. 5E, в то время как, если водитель не нажимает кнопку для продолжения смены полосы движения, процесс переходит к этапу S23 по Фиг. 5С.
[0115] Если всё рассматриваемое транспортное средство V0 не пересекает объектную разметку CL полосы движения, но центральная линия VC рассматриваемого транспортного средства V0 пересекает объектную разметку CL полосы движения, как проиллюстрировано на Фиг. 10 (C), устройство 19 управления может выполнять способ (a4), который включает в себя автономное выполнение продолжения смены полосы движения без явного обеспечения водителю способа отмены продолжения смены полосы движения. В этом случае устройство 19 управления может выполнять схему (c3), которая включает в себя ожидание с сохранением положения движения рассматриваемого транспортного средства в текущем положении, и схему (b3), которая включает в себя приостановку смены полосы движения до тех пор, пока не будет снова обнаружено пространство, соответствующее требуемому расстоянию RR, в пределах расстояния OS до объекта в смежной полосе L3 движения, и возобновление управления сменой полосы движения, когда в пределах расстояния OS до объекта в смежной полосе L3 движения снова обнаруживается пространство, соответствующее требуемому расстоянию RR. В этом случае, например, устройство 19 управления может объявить водителю содержание управления, которое должно быть выполнено с этого момента для продолжения смены полосы движения, например: «Будет выполняться ожидание в текущем положении, поскольку может быть недостаточно пространства для смены полосы движения» и «Управление сменой полосы движения будет возобновлено, если будет найдено место для смены полосы движения». В этом случае процесс переходит к этапу S52 по Фиг. 5E.
[0116] Если все рассматриваемое транспортное средство V0 пересекает объектную разметку CL полосы движения, как проиллюстрировано на Фиг. 10 (D), устройство 19 управления может выполнять способ (a4), который включает в себя автономное выполнение прекращения смены полосы движения без явного обеспечения водителю способа отмены прекращения управления сменой полосы движения. В этом случае устройство 19 управления может выполнять схему (c3), которая включает в себя сохранение положения движения рассматриваемого транспортного средства в текущем положении, и схему (b2), которая включает в себя прекращение только управления сменой полосы движения и продолжение автономного управления движением. В этом случае устройство 19 управления может объявлять водителю содержание управления, которое должно быть выполнено с этого момента для прекращения смены полосы движения, например «Будет выполняться ожидание в текущем положении, поскольку может быть недостаточно места для смены полосы движения» и «Предыдущее управление автономным движением будет продолжено». В этом случае процесс переходит к этапу S23 по Фиг. 5C, завершая процесс управления движением.
[0117] Взаимное расположение в направлении ширины дороги между объектной разметкой CL полосы движения и рассматриваемым транспортным средством V0 не ограничено четырьмя ситуациями, проиллюстрированными на Фиг. 10 (A) - (D) и могут использоваться пять или более или три или менее возможных ситуаций. Сочетание схем управления для каждого взаимного расположения не ограничено вышеописанными сочетаниями. Возможно любое сочетание из двух или более из способа (a) представления информации водителю при прекращении или продолжении управления сменой полосы движения, содержания (b) управления после прекращения или продолжения управления сменой полосы движения и положения (c) движения рассматриваемого транспортного средства при прекращении или продолжении смены полосы движения.
[0118] Далее будет приведено описание для случая, в котором на этапе S51 по Фиг. 5E выполняется продолжение смены полосы движения. За этапом S51 начала продолжения смены полосы движения следует этап S52. На этапе S52 устройство 19 управления использует функцию управления сменой полосы движения для измерения прошедшего времени S2 после того, как управление сменой полосы движения перешло в состояние ожидания на этапе S51. То есть в одном или более вариантах осуществления настоящего изобретения, если на этапе S51 продолжается смена полосы движения, смена полосы движения приостанавливается, и управление сменой полосы движения переходит в состояние ожидания, пока в пределах расстояния OS до объекта в смежной полосе L3 движения не будет вновь обнаружено пространство, соответствующее требуемому расстоянию RR. На этапе S52 измеряется прошедшее время S2 после такого начала ожидания при управлении сменой полосы движения.
[0119] На этапе S53 устройство 19 управления использует функцию управления сменой полосы движения для оценки требуемого времени T3 для перемещения рассматриваемого транспортного средства из текущего положения в целевое положение для смены полосы движения. Требуемое время T3 можно оценить тем же способом, что и на этапе S6 по Фиг. 5А.
[0120] На этапе S54 устройство 19 управления использует функцию управления сменой полосы движения, чтобы определить, превышает ли общее время (S2+T3) из прошедшего времени S2, измеренного на этапе S52, и требуемого времени T3, оцененного на этапе S53, значение ограничения Z по времени, полученное на этапе S13 по Фиг. 5B. Если общее время (S2+T3) превышает ограничение Z по времени, процесс переходит к этапу S55, на котором устройство 19 управления использует функцию управления сменой полосы движения для отмены состояния ожидания управления сменой полосы движения и перемещения рассматриваемого транспортного средства в положение движения рассматриваемого транспортного средства перед началом смены полосы движения. За этапом S55 следует этап S23 по Фиг. 5C, на котором завершается управление сменой полосы движения. С другой стороны, если общее время (S2+T3) не превышает ограничение Z по времени, процесс переходит к этапу S56.
[0121] На этапе S56 устройство 19 управления остаётся в состоянии ожидания при управлении сменой полосы движения. За этапом S56 следуют этапы S57 - S58, на которых определяется текущее расстояние до объекта и расстояние до объекта после требуемого времени T3, как на этапах S4 и S7 по Фиг. 5А. Затем на этапе S59, как на этапе S9 по Фиг. 5A, устройство 19 управления определяет, имеется ли в пределах расстояния OS до объекта в смежной полосе L3 движения после требуемого времени T3 пространство, соответствующее требуемому расстоянию RR. Расстояние OS до объекта в смежной полосе L3 движения после требуемого времени T3 оценивается на этапе S58. На этапе S59 устройство 19 управления устанавливает требуемое расстояние RR в целевом положении для смены полосы движения. Если расстояние OS до объекта в смежной полосе L3 движения после требуемого времени T3 включает в себя требуемое расстояние RR, устройство 19 управления определяет, что в пределах расстояния OS до объекта в смежной полосе L3 движения после требуемого времени T3 имеется пространство, соответствующее требуемому расстоянию RR, и процесс переходит к этапу S60. На этапе S60 устройство 19 управления использует функцию управления сменой полосы движения для отмены состояния ожидания при управлении сменой полосы движения и возобновления управления сменой полосы движения, поскольку пространство, соответствующее требуемому расстоянию RR, обнаружено в пределах расстояния OS до объекта в смежной полосе L3 движения. В этом случае процесс возвращается к этапу S15 по Фиг. 5С. С другой стороны, если на этапе S59 определено, что в пределах расстояния до объекта в смежной полосе L3 движения после требуемого времени T3 нет пространства, соответствующего требуемому расстоянию RR, процесс переходит к этапу S61.
[0122] Далее, после выполнения смены полосы движения с полосы L2 движения на полосу L3 движения, проиллюстрированной на левой схеме Фиг. 3, будет описано управление сменой полосы движения с полосы L3 движения на полосу L2 движения, проиллюстрированной на правой схеме Фиг. 3, с обращением к Фиг. 5А - Фиг. 5Е. Если выполняется смена полосы движения, проиллюстрированная на левой схеме Фиг. 3, устройство 19 управления выполняет процесс этапа S23 по Фиг. 5C, а затем процесс возвращается к этапу S1 по Фиг. 5А. Затем выполняются соответствующие процессы этапов S1-S10 для управления сменой полосы движения, проиллюстрированной на правой схеме Фиг. 3. Следует отметить, что эти процессы являются такими же, как процесс управления сменой полосы движения, проиллюстрированной на левой схеме Фиг. 3, описанный выше, поэтому их описание не будет приведено.
[0123] На этапе S11 по Фиг. 5B устройство 19 управления использует функцию управления сменой полосы движения для выполнения процесса запроса согласия для текущего (второго) управления сменой полосы движения. На этапе S11 устройство 19 управления определило ситуацию, в которой возможна смена полосы движения с полосы L3 движения на полосу L2 движения посредством процессов этапов S1-S9. Следовательно, перед фактическим выполнением смены полосы движения устройство 19 управления запрашивает у водителя ответ относительно того, согласен ли он с выполнением управления сменой полосы движения, чтобы побудить водителя самостоятельно подтвердить безопасность. Это соответствует представлению второй информации управления движением согласно настоящему изобретению.
[0124] На этапе S111 по Фиг. 5D, иллюстрирующей подпроцедуру процесса запроса согласия для управления сменой полосы движения, выполняемого на этапе S11, устройство 19 управления использует функцию представления информации управления движением для считывания формы ввода для предыдущего ввода согласия. Форма ввода для предыдущего ввода согласия - это форма ввода, сохраненная на этапе S116 из этапов в предыдущих подпроцедурах. Предположим, что форма ввода для предыдущего ввода согласия, то есть первого ввода согласия, для смены полосы движения с полосы L2 движения на полосу L3 движения является первой информацией управления движением по левым схемам по Фиг. 4А - 4Е.
[0125] На этапе S112 устройство 19 управления использует функцию определения степени срочности, чтобы определить, является ли степень срочности ввода согласия водителем равной или большей, чем заданное пороговое значение. Если определено, что степень срочности ввода согласия является большей, процесс переходит к этапу S114. На этапе S114 устройство 19 управления устанавливает форму ввода для текущего ввода согласия в ту же форму, что и форма ввода для предыдущего ввода согласия. То есть в этом примере устройство 15 представления представляет первую информацию управления движением, описанную с обращением к соответствующим левым схемам на Фиг. 4А - 4Е. На этапе S116 устройство 19 управления сохраняет форму ввода для текущего ввода согласия.
[0126] С другой стороны, если на этапе S113 определяется, что степень срочности ввода согласия ниже заданного порогового значения, процесс переходит к этапу S115. На этапе S115 устройство 19 управления устанавливает форму ввода для текущего ввода согласия в форму ввода, отличную от формы ввода для предыдущего ввода согласия. То есть в этом примере устройство 15 представления представляет первую информацию управления движением, описанную с обращением к соответствующим правым схемам по Фиг. 4А - 4Е.
[0127] В примере по Фиг. 4A перед началом смены полосы движения с крайней правой полосы L3 движения на центральную полосу L2 движения, проиллюстрированной на Фиг. 3, устройство 19 управления использует функцию представления информации управления движением для управления отображением устройства 15 представления для отображения, как проиллюстрировано на правой схеме Фиг. 4A, рассматриваемого транспортного средства V0 и данных изображения вида вперёд, включая полосы L1, L2 и L3 движения, вместе с целью смены полосы движения рассматриваемого транспортного средства V0 и кнопкой OK, которая представляет собой второй блок 152 ввода. Цель смены полосы движения рассматриваемого транспортного средства V0 отображается посредством визуального образа, такого как стрелка. Кроме того, вместе с этим отображением из громкоговорителя выводятся голосовые данные, например: «Вы согласны со сменой полосы движения? Если Вы согласны со сменой полосы движения, пожалуйста, прикоснитесь к кнопке ОК».
[0128] В примере по Фиг. 4B перед началом смены полосы движения с крайней правой полосы L3 движения на центральную полосу L2 движения устройство 19 управления управляет отображением устройства 15 представления для отображения, как проиллюстрировано на правой схеме Фиг. 4B, рассматриваемого транспортного средства V0 и данных изображения вида вперёд, включая полосы L1, L2 и L3 движения, вместе с целью смены полосы движения рассматриваемого транспортного средства V0, кнопкой OK, которая представляет собой второй блок 152 ввода, и кнопкой NG, которая представляет собой первый блок 151 ввода. Цель смены полосы движения рассматриваемого транспортного средства V0 отображается посредством визуального образа, такого как стрелка. Кроме того, вместе с этим отображением из громкоговорителя выводятся голосовые данные, например: «Вы согласны со сменой полосы движения? Если Вы согласны со сменой полосы движения, пожалуйста, прикоснитесь к кнопке ОК».
[0129] В примере по Фиг. 4C перед началом смены полосы движения с крайней правой полосы L3 движения на центральную полосу L2 движения устройство 19 управления управляет отображением устройства 15 представления для отображения, как проиллюстрировано на правой схеме Фиг. 4C, рассматриваемого транспортного средства V0 и данных изображения вида вперёд, включая полосы L1, L2 и L3 движения, вместе с целью смены полосы движения рассматриваемого транспортного средства V0, кнопкой
[0130] В примере по Фиг. 4D перед началом смены полосы движения с крайней правой полосы L3 движения на центральную полосу L2 движения, устройство 19 управления управляет отображением устройства 15 представления для отображения, как проиллюстрировано на правой схеме Фиг. 4D, рассматриваемого транспортного средства V0 и данных изображения вида вперёд, включая полосы L1, L2 и L3 движения вместе с целью смены полосы движения рассматриваемого транспортного средства V0 и множеством кнопок
[0131] В примере по Фиг. 4E перед началом смены полосы движения с крайней правой полосы L3 движения на центральную полосу L2 движения устройство 19 управления управляет отображением устройства 15 представления для отображения, как проиллюстрировано на правой схеме Фиг. 4E, рассматриваемого транспортного средства V0 и данных изображения вида вперёд, включая полосы L1, L2 и L3 движения вместе с целью смены полосы движения рассматриваемого транспортного средства V0, которая отображается с использованием визуального образа, такого как стрелка. Кроме того, вместе с этим отображением из громкоговорителя выводятся голосовые данные, например: «Вы согласны со сменой полосы движения? Если Вы согласны со сменой полосы движения, пожалуйста включите переключатель указателя поворота».
[0132] Возвращаясь к Фиг. 5B, на этапе S12 устройство 19 управления определяет, согласен ли водитель со сменой полосы движения с полосы L3 движения на полосу L2 движения в ответ на запрос согласия по этапу S11. Это будет описано более конкретно. В ответ на вторую информацию управления движением, проиллюстрированную на правой схеме Фиг. 4A, водитель самостоятельно визуально проверяет окружающую обстановку и тому подобное, и в случае принятия решения о согласии со сменой полосы движения или в других подобных случаях водитель прикасается к кнопке ОК, которая установлена во втором блоке 152 ввода, для указания на намерение водителя согласиться со сменой полосы движения с полосы L3 движения на полосу L2 движения. Аналогичным образом, в ответ на вторую информацию управления движением, проиллюстрированную на правой схеме Фиг. 4B, водитель самостоятельно визуально проверяет окружающую обстановку и тому подобное, и в случае принятия решения о согласии со сменой полосы движения или в других подобных случаях водитель прикасается к кнопке ОК, которая установлена во втором блоке 152 ввода, для указания на намерение водителя согласиться со сменой полосы движения с полосы L3 движения на полосу L2 движения. Аналогичным образом, в ответ на вторую информацию управления движением, проиллюстрированную на правой схеме Фиг. 4C, водитель самостоятельно визуально проверяет окружающую обстановку и тому подобное, и в случае принятия решения о согласии со сменой полосы движения или в других подобных случаях водитель прикасается к кнопке
[0133] Аналогичным образом, в ответ на вторую информацию управления движением, проиллюстрированную на правой схеме Фиг. 4D, водитель самостоятельно визуально проверяет окружающую обстановку и тому подобное, и в случае принятия решения о смене полосы движения или в других подобных случаях водитель прикасается к кнопке
[0134] Процесс от этапа S13 по Фиг. 5B до этапа S23 по Фиг. 5C аналогичен процессу управления сменой полосы движения, проиллюстрированному на левой схеме Фиг. 3, описанный выше, и поэтому его объяснение не приведено, но выполнение этих процессов завершает смену полосы движения с полосы L3 движения на полосу L2 движения, проиллюстрированную на правой схеме фиг. 3.
[0135] Как описано выше, устройство 1 управления движением и способ управления движением для транспортного средства в одном или более вариантах осуществления настоящего изобретения перед выполнением автономного управления движением для транспортного средства устанавливает форму ввода для текущего ввода согласия в ответ на информацию управления движением, представленную водителю в форме ввода, отличной от формы ввода для предыдущего ввода согласия. То есть каждый раз, когда выполняется автономное управление движением, форма ввода для ввода согласия от водителя изменяется, поэтому водитель будет знать или обращать внимание на измененную форму ввода. Это позволяет водителю продолжать контролировать работу транспортного средства.
[0136] В соответствии с устройством 1 управления движением и способом управления движением для транспортного средства в одном или более вариантах осуществления настоящего изобретения, цель ввода для предыдущего ввода согласия устанавливается в первое устройство ввода в транспортном средстве, а цель ввода для текущего ввода согласия устанавливается во второе устройство ввода, отличное от первого устройства ввода. Следовательно, поскольку водитель должен проверять устройство ввода, изменяемое каждый раз, когда выполняется автономное управление движением, такое как смена полосы движения, тем самым предотвращается отвлечение внимания. В результате сам водитель становится более осведомленным о подтверждении безопасности, и таким образом появляется возможность контролировать работу рассматриваемого транспортного средства.
[0137] В соответствии с устройством 1 управления движением и способом управления движением для транспортного средства в одном или более вариантах осуществления настоящего изобретения, цель ввода для предыдущего ввода согласия устанавливается в первый блок 151 ввода устройства ввода, и цель ввода для текущего ввода согласия устанавливается во второй блок 152 ввода, отличный от первого блока 151 ввода. Следовательно, поскольку водитель должен проверять положения блока 151 и 152 ввода, изменяемые каждый раз, когда выполняется автономное управление движением, такое как смена полосы движения, тем самым предотвращается отвлечение внимания. В результате сам водитель становится более осведомленным о подтверждении безопасности, и таким образом появляется возможность контролировать работу рассматриваемого транспортного средства.
[0138] В соответствии с устройством 1 управления движением и способом управления движением для транспортного средства в одном или более вариантах осуществления настоящего изобретения, предыдущая информация управления движением представляет информацию, которая включает в себя первый блок 151 ввода и не включает в себя второй блок 152 ввода, а текущая информация управления движением представляет информацию, которая включает в себя второй блок 152 ввода и не включает в себя первый блок 151 ввода. Следовательно, поскольку водитель должен проверять положения блоков 151 и 152 ввода, изменяемые каждый раз, когда выполняется автономное управление движением, такое как смена полосы движения, тем самым предотвращается отвлечение внимания. В результате сам водитель становится более осведомленным о подтверждении безопасности, и таким образом появляется возможность контролировать работу рассматриваемого транспортного средства.
[0139] В соответствии с устройством 1 управления движением и способом управления движением для транспортного средства в одном или более вариантах осуществления настоящего изобретения, устройство ввода дополнительно имеет третий блок ввода, в который вводится первый ввод несогласия, и четвертый блок ввода, в который вводится второй ввод несогласия, причём третий блок устанавливается в положение, отличное от первого положения ввода, четвертый блок ввода устанавливается в положение, отличное от второго положения ввода, причём предыдущая информация управления движением представляет третий блок ввода и первый блок ввода, и текущая информация управления движением представляет четвертый блок ввода и второй блок ввода. Следовательно, поскольку водитель должен проверять положения блоков 151 и 152 ввода, изменяемые каждый раз, когда выполняется автономное управление движением, такое как смена полосы движения, тем самым предотвращается отвлечение внимания. В результате сам водитель становится более осведомленным о подтверждении безопасности, и таким образом появляется возможность контролировать работу рассматриваемого транспортного средства. Кроме того, представление намерения не согласиться может быть выполнено конкретным действием водителя, таким образом несогласие может быть передано более надежно.
[0140] В соответствии с устройством 1 управления движением и способом управления движением для транспортного средства в одном или более вариантах осуществления настоящего изобретения цель ввода для предыдущего ввода согласия устанавливается в первый блок ввода для приема ввода первым способом, и цель ввода для текущего ввода согласия устанавливается во второй блок ввода для приема ввода вторым способом ввода, отличным от первого способа ввода. Следовательно, поскольку водитель должен проверять способ ввода для ввода согласия, изменяемый каждый раз, когда выполняется автономное управление движением, такое как смена полосы движения, тем самым предотвращается отвлечение внимания. В результате сам водитель становится более осведомленным о подтверждении безопасности, и таким образом появляется возможность контролировать работу рассматриваемого транспортного средства.
[0141] В соответствии с устройством 1 управления движением и способом управления движением для транспортного средства в одном или более вариантах осуществления настоящего изобретения, если степень срочности текущего ввода согласия от водителя равна или выше заданного порогового значения, форма ввода для текущего ввода согласия устанавливается в ту же форму, что и форма ввода для предыдущего ввода согласия. Это позволяет водителю сосредоточиться на контроле транспортного средства, не уделяя дополнительного внимания форме ввода для текущего ввода согласия.
[0142] В соответствии с устройством 1 управления движением и способом управления движением для транспортного средства в одном или более вариантах осуществления настоящего изобретения, автономное управление движением включает в себя по меньшей мере одно из управления сменой полосы движения транспортного средства, управления движением для поворота направо или управление движением для поворота налево для транспортного средства, и управление движением транспортного средства при выезде с главной дороги или управление движением при въезде на главную дорогу. Поскольку задействованы основные элементы управления автономным управлением движением, возможность контроля работы рассматриваемого транспортного средства обеспечивается в большей степени.
[0143] В соответствии с устройством 1 управления движением и способом управления движением для транспортного средства в одном или более вариантах осуществления настоящего изобретения выполнение автономного управления движением запрещается, если не обнаруживается ввод согласия от водителя. Это позволяет выполнять управление движением, отдавая приоритет проверке безопасности со стороны водителя.
[Пояснения к условным обозначениям и ссылочным позициям]
[0144] 1 Устройство управления движением
11 Датчики
12 Устройство обнаружения положения рассматриваемого транспортного средства
13 Картографическая база данных
14 Бортовое оборудование
15 Устройство представления
151 Первый блок ввода
152 Второй блок ввода
16 Устройство ввода
17 Устройство связи
18 Устройство управления движением. 19... Устройство управления
V0 Рассматриваемое транспортное средство
V1 Другое транспортное средство
L1, L2, L3 Полоса движения
RS Обочины дороги
OS Расстояния до объектов
RR Требуемое расстояние
RA Расстояние, в пределах которого рассматриваемое транспортное средство не может двигаться
RL Разметка, указывающая на запрет смены полосы движения
CL Объектная разметка полосы движения
VC Центральная линия рассматриваемого транспортного средства
Реферат
Изобретение относится к транспортным средствам. В способе управления движением для транспортного средства для выполнения автономного управления движением перед выполнением автономного управления движением представляют водителю, когда транспортное средство движется, информацию управления движением в отношении того, согласен ли он с выполнением автономного управления движением. Затем обнаруживают, в ответ на представление информации управления движением, ввод согласия, сделанный водителем. Данный ввод указывает, что водитель согласен с выполнением автономного управления движением. Если после выполнения первого управления движением в качестве автономного управления движением выполняют второе управление движением, отличное от первого управления движением, устанавливают форму ввода для ввода согласия для второго управления движением в форму ввода, отличную от формы ввода для ввода согласия для первого управления движением. Реализуется контроль водителем работы транспортного средства. 2 н. и 9 з.п. ф-лы, 25 ил.

Формула
Документы, цитированные в отчёте о поиске
Автомобильная система рекомендаций для водителя
Комментарии