Система обхода от препятствий для летательного аппарата с несущим винтом - RU2312797C2
Код документа: RU2312797C2
Чертежи



Описание
Область техники
Настоящее изобретение относится к системе обхода препятствий для винтокрыла или летательного аппарата с несущим винтом, такого как вертолет, в особенности к усовершенствованным бортовым системам обхода препятствий, обеспечивающим визуальное и звуковое предупреждение летчика о необходимости выполнения корректирующих действий для предупреждения опасной ситуации.
Уровень техники
Низко летающие летательные аппараты, особенно вертолеты, рискуют столкнуться с линиями электропередач и другими физическими препятствиями. Линии электропередач не легко увидеть, а другие физические препятствия могут быть не замечены, когда внимание летчика сфокусировано на трудном маневре.
Предпринимались различные подходы для содействия уклонения от линий электропередач и от других физических препятствий. Например, в более раннем патенте № 6002348, Greene и др., автора настоящего изобретения раскрывается устройство, помогающее летчику обнаружить линии электропередач. Как раскрыто в этом документе, бортовой детектор линий электропередач и система предупредительной сигнализации включает низкочастотное радио и антенну для детектирования сигнала переменного тока с частотой от около 50 до 60 Гц. Система также включает подсистему для выработки однозначно определяемого сигнала звукового сопровождения, такого как серия щелчков, для предупреждения летчика о том, что он летит вблизи одной или более линий электропередач. Кроме того, система включает приглушающий звук элемент для приглушения сигнала звукового сопровождения и замены его видеосигналом. Система также включает датчик усиления для замены сигнала звукового сопровождения в любой момент, при уменьшении расстояния между вертолетом и линией электропередач. В этом документе раскрыта также вторая или резервная система. Эта система включает в себя GPS приемник (глобальная система навигации и определения положения) и базу данных GIS (геоинформационная система) для определения местоположения вертолета по отношению к сети линий электропередач и обеспечения сигнала тревоги при приближении вертолета к линии электропередач.
Другой метод для обхода стационарных препятствий раскрыт в патенте США №6076042, Tognazzini и др., озаглавленном «Устройство отображения разброса высот для летательного аппарата» и раскрывающем систему, способ и устройство для уклонения летательного аппарата от столкновений со стационарными препятствиями. В таких системах летательный аппарат обеспечивается бортовым дисплеем с упрощенным не перегруженным изображением всех объектов, расположенных на запланированном маршруте летательного аппарата или ближайших к этому маршруту на определенной высоте полета плюс или минус предварительно установленная надбавка, такая как образующие опасную зону 100 футов. На изображении представлены опасные объекты в зоне, географически привязанной к местоположению и маршруту летательного аппарата. Кроме препятствий и опасной зоны, на изображении могут быть представлены географические подробности лежащей внизу местности. Эта информация представлена в форме топографической карты движения. Затем по мере приближения к опасному объекту в опасной зоне изображение препятствий или опасных объектов в этой зоне увеличивается, для привлечения внимания летчика. Когда летательный аппарат оказывается на внешней границе предварительно заданной зоны маневрирования для уклонения от опасного объекта, в которой корректирующие действия уже обязательны, на дисплее происходят заметные изменения. Дополнительный элемент системы может давать звуковое предупреждение в дополнение к звуковым указаниям о тех действиях, которые необходимо предпринять для того, чтобы избежать столкновения.
Другой подход к уклонению от физических препятствий раскрыт в патенте США 6583733, Ishihara и др., который относится к усовершенствованной системе предупреждения о приближении к земле. В этой системе используется навигационная информация от системы глобального позиционирования и/или системы управления полетом, и/или коммерческой навигационной системы, система также включает базу данных о местности/препятствиях и скорректированный сигнал барометрической высоты. Широта и долгота текущего местоположения летательного аппарата используются в алгоритме поиска аэропорта и местности, предусматривающем сигнал предупреждения о рельефе местности, основанный на положении и векторе направления полета летательного аппарата. Устное предупреждение обеспечивается генератором голоса и громкоговорителем, в то время как визуальные предупреждения обеспечиваются отображением карты движения.
Предполагается, что может быть относительно большой коммерческий спрос на бортовую систему обнаружения препятствий и системы оповещения в соответствии с настоящим изобретением. Должна существовать относительно большая потребность, поскольку такие системы обеспечивают усовершенствованное предупреждение летчика, содействующее выполнению корректирующих действий, и являются высоко надежными. Такие системы также относительно недороги в изготовлении и установке, имеют минимальный вес и размер, легко устанавливаются и обслуживаются, долговечны и в то же время обеспечивают четкое предупреждение летчика о том, что летательный аппарат пролетает вблизи физического препятствия. Кроме того, предполагается, что бортовой детектор препятствий и система оповещения, описанная здесь, в значительной степени устраняют недостатки устройств известных из уровня техники, что станет видно из ознакомления с подробным описанием изобретения.
Краткое описание изобретения
По существу, настоящее изобретение представляет собой усовершенствованный бортовой детектор препятствий и систему оповещения для предупреждения летчика летательного аппарата с несущим винтом о близости физического препятствия. Система включает в себя дисплей и средства, такие как GPS приемник и альтиметр, для указания высоты, курса и положения летательного аппарата. Система также включает компьютер для отображения карты движения на дисплее, чтобы таким образом отобразить топографию области вокруг местоположения летательного аппарата. Предусмотрены также средства, включающие компьютер, для определения первой опасной зоны на основе курса и высоты летательного аппарата. В предпочтительном варианте осуществления изобретения средства определения первой опасной зоны формируют первое цветное изображение первой опасной зоны на дисплее на основе данных цифровой карты. Система также включает средства, включающие компьютерную систему, для обнаружения второй или более опасной зоны на основе курса и высоты летательного аппарата, и для формирования второго цветного изображения более опасной зоны на основе данных карты движения для предупреждения летчика о более опасной зоне. Также в предпочтительном варианте осуществления изобретения система включает в себя средства обнаружения физического препятствия в пределах одной из зон и в пределах предварительно установленного расстояния от летательного аппарата, и средства для формирования серии щелчков, подобным тем, что производятся счетчиком Гейгера, когда летательный аппарат находится в пределах предварительно установленного расстояния от препятствия, и для увеличения частоты серии щелчков по мере приближения летательного аппарата к физическому препятствию.
Далее изобретение описывается с использованием сопровождающих чертежей, на которых одинаковые ссылочные номера используются для обозначения одинаковых деталей.
Описание фигур
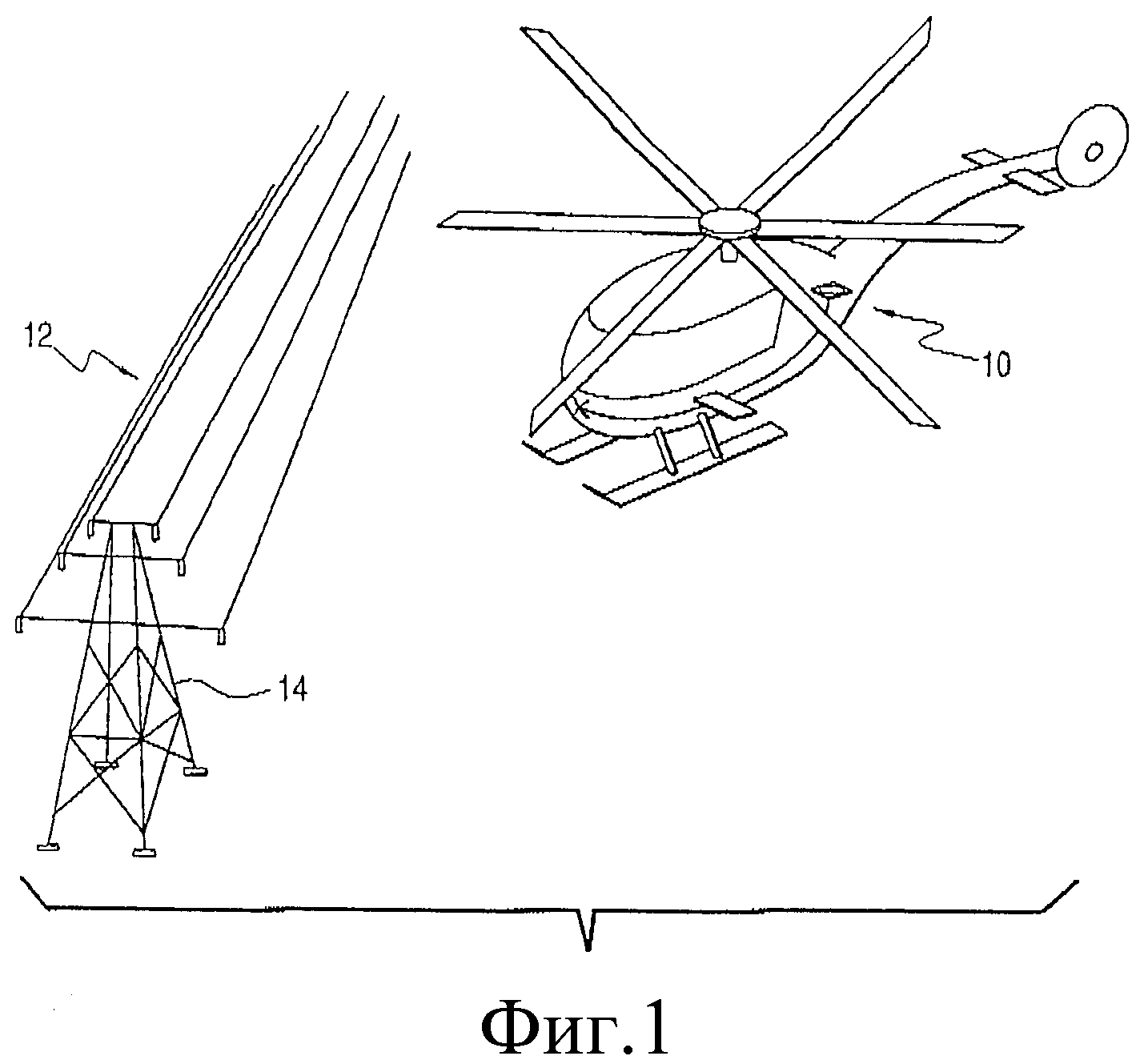
Фиг.1 представляет собой перспективный вид вертолета вблизи линий электропередач, на котором вертолет содержит систему оповещения в соответствии с предшествующим уровнем техники;
фиг.2 представляет собой схему системы оповещения в соответствии с предшествующим уровнем техники;
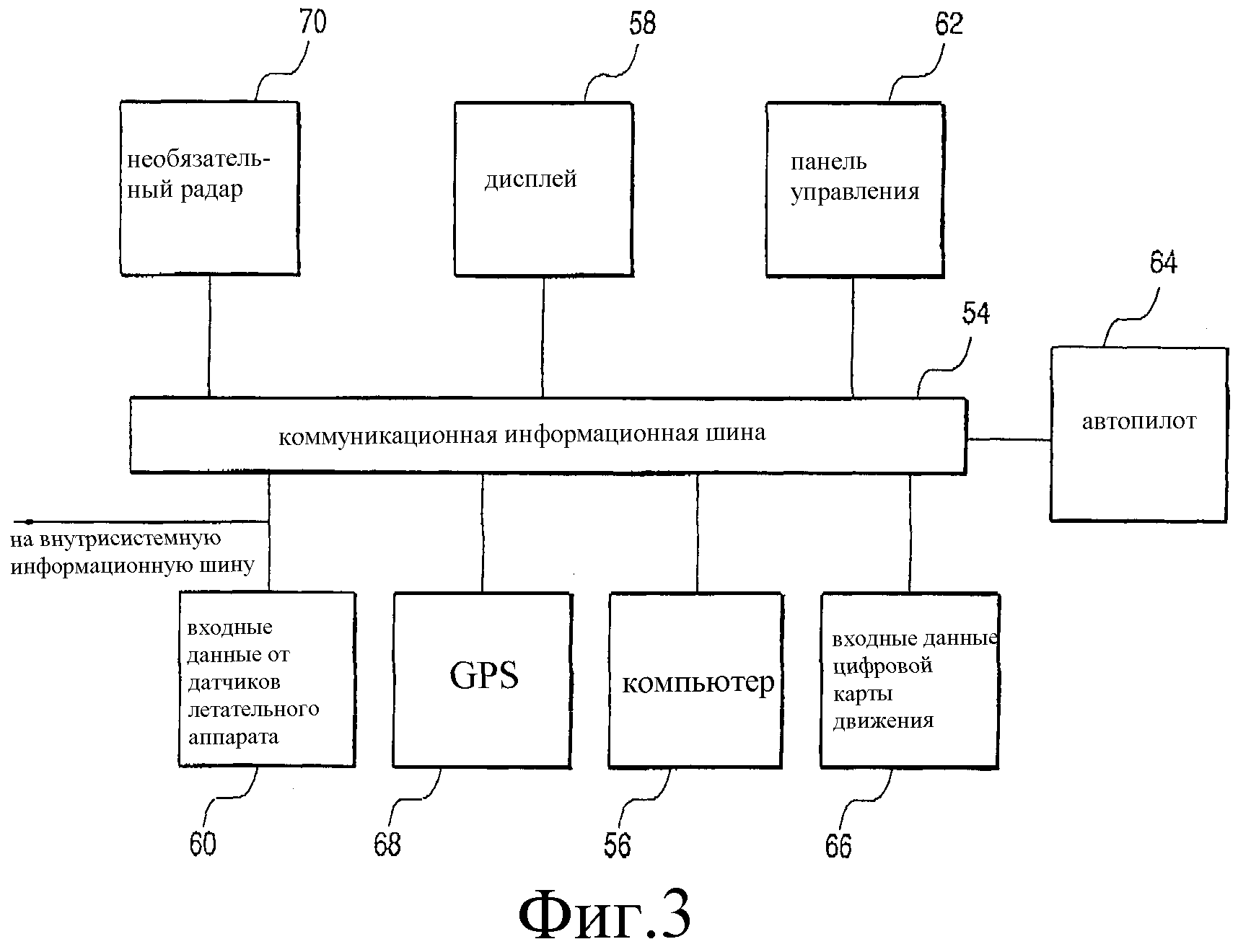
фиг.3 представляет собой схематическое изображение системы предотвращения столкновений летательного аппарата со стационарными препятствиями в соответствии с предшествующим уровнем техники;
фиг.4 представляет собой изображение окружающей местности, используемое в настоящем изобретении;
фиг.5 представляет собой схематическое изображение системы в соответствии с настоящим изобретением; и
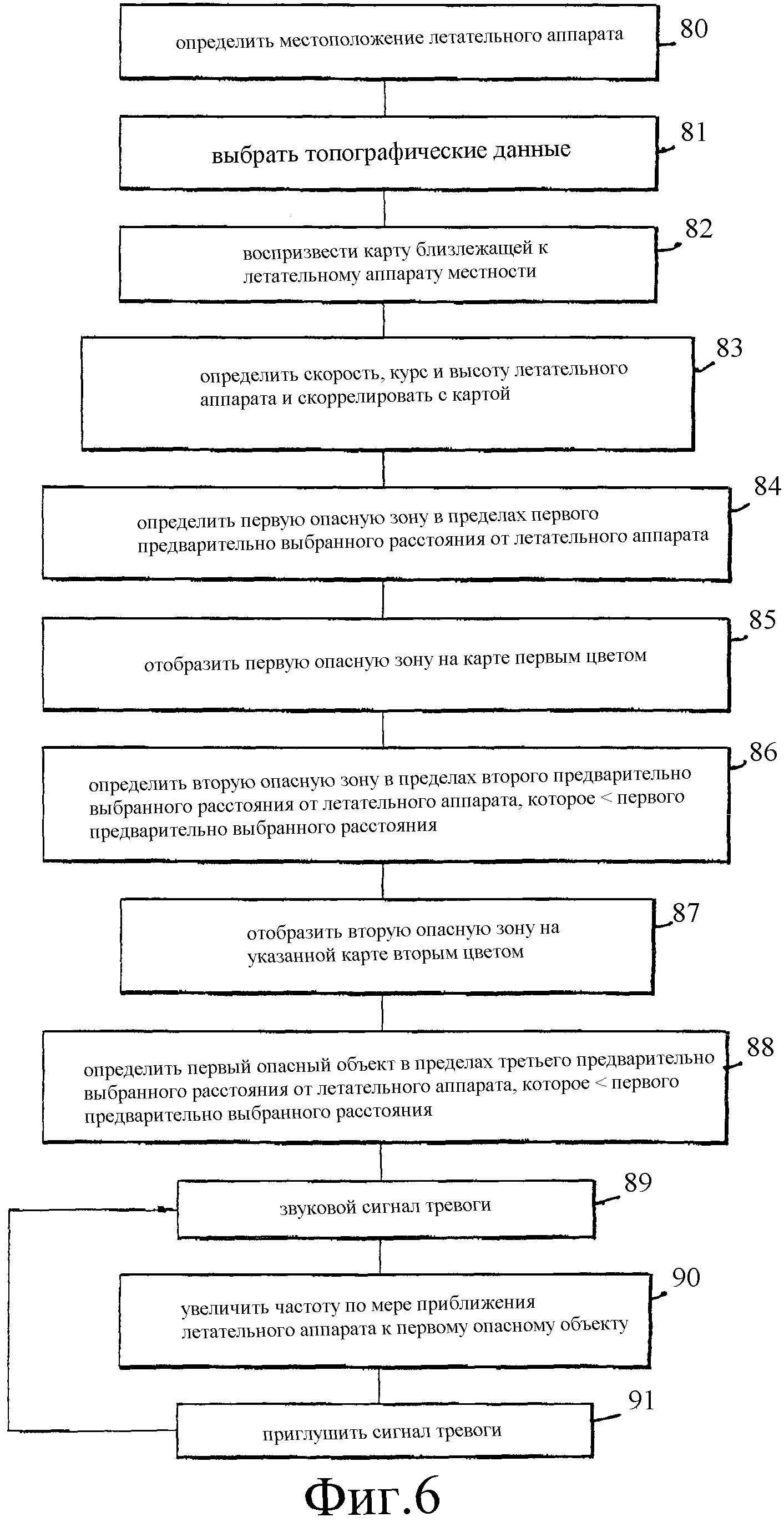
фиг.6 представляет собой блок-схему, показывающую работу и способ согласно настоящему изобретению.
Подробное описание предпочтительных вариантов осуществления изобретения
На фиг.1 и 2 показана система обнаружения линий электропередач в соответствии с предшествующим уровнем техники, описанным в патенте США № 6002348, заявителя настоящего изобретения, включенным сюда путем ссылки. На фиг.1 и 2 вертолет 10 показан в непосредственной близости от множества линий электропередач 12, протянутых от опоры 14 обычным образом. Как раскрыто в патенте, низкочастотный радиоприемник 16 настраивают на частоту линии электропередач, около 60 Герц, и адаптируют в ответ на предварительно установленный уровень выходного сигнала. Этот уровень выходного сигнала формируется, когда летательный аппарат пролетает вблизи одной или более линий электропередач, и является функцией величины передаваемой по линиям энергии и расстояния от летательного аппарата до линий электропередач. В таком случае выходной сигнал приемника является показателем расстояния.
Низкочастотный радиоприемник 16 оперативно соединен с антенной 18 обычным образом. Радиоприемник 16 выполнен с возможностью выделения сигнала в 50-60 Герц из сигналов, доступных антенне. Это осуществляется настройкой приемника на требуемую частоту посредством обычной схемы настройки.
Антенна 18, соединенная с низкочастотным радиоприемником 16, может быть разной формы и длины, что хорошо понятно специалистам в данной области техники. Тем не менее использовалась простая штыревая антенна и ОНЧ радиоприемник (0,2-11 кГц). Описанные ОНЧ радиоприемник и антенна есть у S.P.Mc Greevy Productions, Лоан Пайн, Калифорния 93545-0928. В соответствии с раскрытием радиоприемник подает сигнал на преобразователь 22 сигналов (обозначен П.C. на фиг.2), который формирует серию щелчков, подобных щелчкам, производимым счетчиком Гейгера. По мере усиления сигнала преобразователь сигналов увеличивает частоту щелчков для предупреждения летчика о том, что летательный аппарат приближается к линии электропередач.
Преобразователь 22 сигналов может, например, включать в себя выпрямитель или схему АРУ, которая преобразует радиосигнал в линейный сигнал постоянного тока и в серию импульсов. Когда радиосигнал усиливает сигнал постоянного тока, это приводит в действие преобразователь частоты, который вырабатывает прямоугольные сигналы, чтобы возбудить сигнал звукового сопровождения и таким образом произвести серию щелчков, что хорошо понятно специалисту в данной области техники. Также предполагается, что серия щелчков может быть произведена и иными способами, например, посредством компьютерной микросхемы и звуковой платы с соответствующим программированием.
Преобразователь 22 сигнала формирует громкие щелкающие звуки посредством подходящего динамика 24 или наушников, чтобы таким образом предупредить летчика о близости одной или более линий электропередач. Тогда летчик предупрежден о том, что нужно визуально идентифицировать препятствие и избежать полета слишком близко к линии электропередач.
Для вертолетов, используемых для неотложной медицинской помощи, часто бывает необходимо, чтобы летательный аппарат летал, приземлялся и взлетал в зоне, расположенной около одной или нескольких линий электропередач. Также часто бывает необходимо ожидать на земле, поблизости от места, где произошел несчастный случай, пока одного или более пострадавших вынесут с места происшествия и погрузят в летательный аппарат. Поэтому предусмотрены такие средства, как кнопка 28 приглушения, для приглушения звука, системы оповещения. Эти средства, также как кнопка 28 приглушения звука, могут быть также подсоединены к источнику 30 света для формирования визуального сигнала, такого, как постоянный или мигающий красный свет, когда сигнал звукового сопровождения приглушен. Например, может быть предусмотрен двухпозиционный ручной переключатель для того, чтобы переключаться с сигнала звукового сопровождения на визуальное предупреждение.
С практической точки зрения, авария может произойти, когда вертолет или другой летательный аппарат покидает место происшествия. Например, летчик может оказаться слишком занят транспортировкой раненых и забыть о близости линий электропередач. Летчик может даже не заметить мигающий или постоянный красный свет, особенно если на месте происшествия находится много транспортных средств неотложной помощи с мигающими источниками света. По этой причине система включает схему 26 датчика усиления для обнаружения увеличения силы сигнала (из-за уменьшения расстояния между летательным аппаратом и линией электропередач) и для того, чтобы разблокировать элемент приглушения в случае такого усиления. Путем разблокировки элемента приглушения летчику снова напоминают об опасном близком расположении линии электропередач, когда расстояние между летательным аппаратом и линией электропередач уменьшается.
Схема 26 датчика усиления может, например, включать простой детектор уровня сигнала и схему сравнения. Например, когда нажата кнопка приглушения, устанавливается исходный уровень. Исходный уровень устанавливается на основе величины напряжения постоянного тока. Когда сигнал превысит исходный сигнал, как, например, когда летательный аппарат подлетает близко к линии электропередач, приводится в действие переключатель, который снова подключает звуковой сигнал. Такая схема может быть реализована различными обычными путями, но она должна быть приспособлена для особых задач системы оповещения, что понятно специалисту в данной области техники.
На фиг.3 показано бортовое устройство отображения разброса высот для летательного аппарата, относящееся к типу, раскрытому в вышеупомянутом патенте США № 6076042, Tognazzini, который также включен сюда путем ссылки. В соответствии с раскрытием на данной фигуре схематично показана внутрисистемная коммуникационная информационная шина 54. Управляющий компьютер 56, управляющий опасной ситуацией, объединяет в себе функции управления опасной ситуацией, как это описано. Дисплей 58 управления опасной ситуацией стратегически размещен в кабине летательного аппарата в поле зрения летчика. Входные данные от датчиков летательного аппарата показаны позицией 60 и обычно они предоставляют информацию о скорости летательного аппарата, направлении, скорости набора высоты и снижения, высоте и связанных с ними функциях. Может быть предусмотрено соединение с внутрисистемной коммуникационной информационной шиной для получения этих и других данных о параметрах летательного аппарата. К ним могут относиться такие параметры, как минимальный радиус поворота летательного аппарата при различных скоростях, доступная скороподъемность на текущей высоте, скорость и функциональные возможности двигателя, практическая скорость торможения при текущих условиях и аналогичные параметры. Очевидно, что эти параметры зависят от условий и в случае коммерческого летательного аппарата они также зависят от комфорта пассажиров и порога незапланированной реакции. Панель управления системой обозначена позицией 62, а автопилот - позицией 64. Входные данные цифровой карты 66 движения предоставляют топографическую информацию о пролетаемой местности.
Для функционирования системы необходимо, чтобы местоположение летательного аппарата было все время точно известно. С этой целью работа системы базируется на Глобальной Системе Определения Местоположения (GPS). Это космическая триангуляционная система, использующая спутники и компьютеры для определения местоположения в любой точке земли. Приемник GPS, предоставляющий выходные данные на коммуникационную шину 54, показан позицией 68. Вместе с системой определения местоположения летательного аппарата может быть использован опционально радар 70.
На фиг.4 показано, как вводная информация о рельефе местности может быть показана на дисплее. Высота местности по отношению к высоте летательного аппарата показана как ряд цветных точечных изображений, плотность которых меняется как функция расстояния между летательным аппаратом и предупредительным указанием рельефа местности. Например, красный цвет может быть использован для предупредительного указания рельефа местности, а желтый или янтарный - для информационного указания. За счет использования цветных образов для указания угрожающего рельефа местности и точечных изображений различной плотности для информации о рельефе местности минимизирована загруженность изображения.
На фиг.5 показана система в соответствии с одним из вариантов осуществления настоящего изобретения. Как показано на этой фигуре, система включает коммуникационную информационную шину 54 и компьютер 56 управления опасной ситуацией для объединения функций управления опасной ситуацией. Дисплей 58 управления опасной ситуацией размещен в кабине вертолета в поле зрения летчика. Входные данные 60 от датчиков летательного аппарата предоставляют информацию о скорости летательного аппарата, направлении, скорости набора высоты и снижения, высоте и других относительных параметрах. Может быть предусмотрено соединение с внутрисистемной информационной шиной для получения этих и других необходимых параметров летательного аппарата.
Кроме того, предусмотрены панель управления 62 системой и входные данные 66 цифровой карты движения, предоставляющие топографические данные о рельефе пролетаемой местности. Важно, чтобы было известно местоположение летательного аппарата. Поэтому используется глобальная система определения местоположения 68. Для обнаружения препятствий может быть использован радар 70.
В предпочтительном варианте осуществления изобретения предусмотрены также низкочастотный радиоприемник 16, антенна для приема сигнала с частотой от около 50 до 60 Герц и подача сигнала на генератор 71 сигнала, который формирует громкий щелкающий звук или серию щелчков посредством динамика 72. Система также включает средства 74 для приглушения звука и устройство блокировки, которое включается схемой 76 датчика усиления, при приближении летательного аппарата к линии электропередач или к другому препятствию. Система может также включать в себя визуальное сигнальное устройство 78, которое может активизироваться, при приглушении звукового сигнала.
Работа системы в соответствии с предпочтительным вариантом осуществления изобретения показана на фиг.6. Как показано на этой фигуре, местоположение летательного аппарата определяется на этапе 80 и выбираются топографические данные на этапе 81. На этапе 82 воспроизводится топографическая карта местности вблизи летательного аппарата. Как показано позицией 83, скорость летательного аппарата, высоту и курс коррелируют с картой и на этапе 84 определяют первую опасную зону в пределах первого предварительно выбранного расстояния от летательного аппарата.
Первая опасная зона в пределах первого предварительно выбранного расстояния от летательного аппарата изображается первым цветом, например, желтым цветом, на этапе 85, а на этапе 86 определяют вторую опасную зону в пределах второго предварительно выбранного расстояния от летательного аппарата, меньшего, чем первое предварительно выбранное расстояние, и она изображается вторым цветом, например, красным, на этапе 87. На этапе 88 обнаруживают первый опасный объект или препятствие в пределах третьего предварительно выбранного расстояния от летательного аппарата, меньшего, чем первое предварительно выбранное расстояние. Затем на этапе 89 раздается звуковой сигнал тревоги, например, серия щелчков, и по мере приближения к препятствию на этапе 90 частота щелчков увеличивается. На этапе 91 летчик может приглушить сигнал, однако если летательный аппарат движется по направлению к препятствию, снова раздастся сигнал, и частота щелчков будет увеличиваться. Кроме того, может быть использована визуальная индикация, такая как мигающий красный свет, который приводится в действие, при приглушении звукового сигнала.
В то время как изобретение раскрыто в связи с предпочтительными вариантами его осуществления, следует понимать, что изменения и модификации могут быть сделаны без выхода за объем притязаний.
Реферат
Группа изобретений относится к технике предотвращения столкновений летательных аппаратов (ЛА), оборудованных несущим винтом, с линиями электропередачи и другими физическими препятствиями. Система включает визуальный дисплей, приемник GPS и альтиметр для указания местоположения и курса ЛА. Компьютер обеспечивает данные карты движения, являющиеся показателем топографии области вокруг местоположения ЛА. Компьютер определяет первую опасную зону в пределах первого предварительно выбранного расстояния от ЛА и формирует первое цветное изображение первой опасной зоны на основе данных цифровой карты. Компьютер также обнаруживает более опасную зону в пределах второго предварительно выбранного расстояния от ЛА, меньшего, чем первое предварительно выбранное расстояние, и формирует второе цветное изображение более опасной зоны. Затем система обнаруживает физическое препятствие, находящееся в пределах третьего предварительно определенного расстояния от ЛА, меньшего, чем первое предварительно определенное расстояние, и посылает сигнал для обеспечения сигнала на сигнализирующем устройстве. Последнее формирует серию звуковых щелчков, частота и/или громкость которых увеличивается по мере приближения к препятствию. Имеются также подсистема приглушения звука, визуальный сигнал тревоги вместо приглушенного звукового сигнала и устройство блокировки приглушения. Группа изобретений обеспечивает создание системы обнаружения препятствий и оповещения летчика с малой стоимостью и повышенной надежностью. 4 н. и 2 з.п. ф-лы, 6 ил.
Комментарии