Системы и способы помощи при парковке транспортного средства - RU2710505C1
Код документа: RU2710505C1
Чертежи
Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к вычислительной системе транспортного средства, сообщающейся с одним или более удаленными датчиками для помощи при парковочном маневре.
УРОВЕНЬ ТЕХНИКИ
[0002] Многие водители считают сложной и затруднительной парковку их транспортного средства в гараже. Было много попыток обеспечения устройства, которое будет предупреждать водителя о подходящем месте для парковки транспортного средства в гараже. Устройство может быть прикреплено к потолку или задней стене гаража для обеспечения предупреждения, которое может визуально восприниматься водителем. Один пример устройства помощи при парковке в гараже представляет собой использование мячика, подвешенного на веревке с потолка гаража. Водитель управляет транспортным средством для въезда в гараж, пока конкретное место на ветровом стекле транспортного средства не войдет в контакт с мячиком. Мячик, подвешенный на веревке, является эстетически непривлекательным, свисая с потолка гаража. В дополнение, устройство из мячика и веревки предназначено для одного транспортного средства и может быть нестабильным из-за легкости перемещения мячика.
[0003] Более техническое решение представляет собой систему и способ связи, причем система связи включает в себя первый модуль связи и второй модуль связи. Первый модуль связи расположен внутри транспортного средства, а второй модуль связи расположен в системе дистанционного открытия дверей гаража и/или в доме. Первое сообщение информации, передаваемое беспроводным образом между первым и вторым модулями связи, может относиться к информации о состоянии транспортного средства. Второе сообщение информации передается между первым и вторым модулями связи. Вторая информация относится к информации о состоянии системы дистанционного открытия дверей гаража и/или дома для помощи водителю при парковке транспортного средства в гараже.
[0004] В другом примере обеспечены способ и система, которые включают в себя использование портативного устройства связи для помощи водителю, управляющему транспортным средством на или из парковочного места. Внешнее устройство датчика транспортного средства расположено неподвижно относительно парковочного места. Устройство датчика фиксирует данные, относящиеся к транспортному средству, расположенному на парковочном месте, и беспроводным образом подает сигналы, содержащие зафиксированные данные так, что сигналы достигают внутренней области транспортного средства посредством портативного устройства связи. Смотри, например, патент США № 8,878,646 и патент США № 8,810,434.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] По меньшей мере в одном варианте выполнения система помощи при парковке транспортного средства включает в себя по меньшей мере один процессор, выполненный с возможностью установления связи с системой автоматизированной парковки внешней по отношению к транспортному средству для помощи при парковочном маневре. Система автоматизированной парковки включает в себя по меньшей мере один датчик для обеспечения измеренного значения расстояния от объекта до транспортного средства. Процессор дополнительно выполнен с возможностью управления тормозной системой транспортного средства на основании измеренного значения расстояния посредством датчика. Процессор дополнительно выполнен с возможностью управления остановкой транспортного средства на основании измеренного значения расстояния меньшего, чем первое заданное пороговое значение.
В дополнительном аспекте по меньшей мере один датчик содержит камеру.
В другом дополнительном аспекте измеренное значение расстояния представляет собой расстояние от стены гаража до транспортного средства, а первое заданное пороговое значение представляет собой калиброванное расстояние такое, что транспортное средство останавливается до контакта со стеной гаража.
В еще одном дополнительном аспекте процессор дополнительно выполнен с возможностью передачи на дисплей значения расстояния от стены гаража до транспортного средства.
В еще одном дополнительном аспекте процессор дополнительно выполнен с возможностью приема запроса на отмену автоматического действия тормоза посредством ввода на датчике педали тормоза.
В еще одном дополнительном аспекте система автоматизированной парковки выполнена с возможностью связи с процессором с помощью сети глобальной системы мобильной связи.
В еще одном дополнительном аспекте процессор дополнительно выполнен с возможностью установления связи с мобильным устройством и связи с системой автоматизированной парковки посредством мобильного устройства.
В еще одном дополнительном аспекте по меньшей мере один датчик содержит первый гаражный датчик, второй гаражный датчик и третий гаражный датчик.
В еще одном дополнительном аспекте процессор дополнительно выполнен с возможностью приема значения расстояния до боковой стены от по меньшей мере одного из первого гаражного датчика, второго гаражного датчика и третьего гаражного датчика и управления системой электроусиления рулевого управления на основании значения расстояния до боковой стены меньшего, чем второе заданное пороговое значение.
В еще одном дополнительном аспекте значение расстояния до боковой стены гаража представляет собой расстояние от боковой стены гаража до транспортного средства, а второе заданное пороговое значение представляет собой калиброванное расстояние такое, что транспортное средство поворачивает посредством системы электроусиления рулевого управления до контакта с боковой стеной гаража.
В еще одном дополнительном аспекте процессор дополнительно выполнен с возможностью передачи на дисплей значения расстояния от боковой стены гаража до транспортного средства.
В еще одном дополнительном аспекте процессор дополнительно выполнен с возможностью приема запроса на отмену автоматического действия рулевого колеса посредством ввода на датчике рулевого колеса.
[0006] По меньшей мере в одном варианте выполнения вычислительная система транспортного средства включает в себя процессор в сообщении с удаленной системой автоматизированной парковки (PAS) для помощи при парковочном маневре. Процессор выполнен с возможностью управления тормозной системой в сообщении с процессором на основании первого значения расстояния, полученного посредством первого датчика PAS, меньшего, чем первое заданное пороговое значение. Процессор дополнительно выполнен с возможностью управления системой усиления рулевого управления на основании второго значения расстояния, полученного посредством второго датчика PAS, меньшего, чем второе заданное пороговое значение.
В дополнительном аспекте первое значение расстояния представляет собой расстояние от стены гаража до транспортного средства, а первое заданное пороговое значение представляет собой калиброванное расстояние такое, что транспортное средство останавливается до контакта со стеной гаража.
В другом дополнительном аспекте процессор дополнительно выполнен с возможностью передачи на дисплей значения расстояния от стены гаража до транспортного средства.
В еще одном дополнительном аспекте второе значение расстояния до гаража представляет собой расстояние от боковой стены гаража до транспортного средства, а второе заданное пороговое значение представляет собой калиброванное расстояние такое, что транспортное средство поворачивает посредством системы усиления рулевого управления до контакта с боковой стеной гаража.
[0007] По меньшей мере в одном варианте выполнения компьютерный программный продукт выполнен в виде невременного машиночитаемого носителя, который запрограммирован для процессора транспортного средства и включает в себя инструкции для установления связи с удаленной системой автоматизированной парковки для обеспечения помощи при парковке. Удаленная система автоматизированной парковки включает в себя по меньшей мере один датчик для измерения данных, относящихся к парковочному маневру. Компьютерный программный продукт включает в себя дополнительные инструкции для приема одного или более значений расстояния посредством по меньшей мере одного датчика на основании обнаруженного объекта. Компьютерный программный продукт включает в себя дополнительные инструкции для передачи команд управления тормозом тормозной системе и команд управления поворотом системе усиления рулевого управления транспортного средства на основании одного или более значений расстояния.
В дополнительном аспекте невременный машиночитаемый носитель дополнительно содержит инструкции для приема первого значения расстояния для парковочного места посредством одного или более значений расстояния и управления системой усиления рулевого управления так, что транспортное средство поворачивает на основании первого значения расстояния меньшего, чем первое заданное пороговое значение.
В другом дополнительном аспекте невременный машиночитаемый носитель дополнительно содержит инструкции для приема второго значения расстояния для парковочного места посредством одного или более значений расстояния и управления тормозной системой так, что транспортное средство останавливается на основании второго значения расстояния меньшего, чем второе заданное пороговое значение.
В еще одном дополнительном аспекте невременный машиночитаемый носитель дополнительно содержит инструкции для передачи на дисплей по меньшей мере одного из одного или более значений расстояния и команд, передаваемых тормозной системе и системе усиления рулевого управления.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008] Фигура 1 представляет собой типичную модульную топологию информационной системы транспортного средства, осуществляющей пользовательскую интерактивную систему отображения информации транспортного средства, согласно варианту выполнения;
[0009] Фигура 2 представляет собой типичную модульную топологию системы автоматизированной парковки, сообщающейся с вычислительной системой транспортного средства, согласно варианту выполнения;
[0010] Фигура 3 представляет собой блок-схему, иллюстрирующую вычислительную систему транспортного средства, сообщающую парковочную информацию одной или более подсистемам на основании данных, принимаемых от системы автоматизированной парковки, согласно варианту выполнения; и
[0011] Фигура 4 представляет собой блок-схему, иллюстрирующую вычислительную систему транспортного средства, осуществляющую парковку транспортного средства на основании данных, принимаемых от системы автоматизированной парковки.
ПОДРОБНОЕ ОПИСАНИЕ
[0012] Далее описаны варианты выполнения настоящего изобретения. Однако должно быть понятно, что раскрытые варианты выполнения представляют собой всего лишь примеры, и другие варианты выполнения могут принимать различные и альтернативные формы. Фигуры не обязательно выполнены в масштабе; определенные признаки могут быть увеличены или уменьшены для демонстрации деталей конкретных компонентов. В связи с этим конкретные конструктивные и функциональные детали, раскрытые здесь, не должны интерпретироваться как ограничивающие, а всего лишь как представляющие основу для изучения специалистом в области техники различных способов применения вариантов выполнения. Для специалиста в области техники будет понятно, что различные признаки, проиллюстрированные и описанные со ссылкой на любую из фигур, могут быть объединены с признаками, проиллюстрированными на одной или более других фигурах, для получения вариантов выполнения, которые явно не проиллюстрированы или не описаны. Сочетания проиллюстрированных признаков обеспечивают типичные варианты выполнения для типичных применений. Однако различные сочетания и преобразования признаков в соответствии замыслами этого раскрытия могут быть желательны для особых применений или осуществлений.
[0013] Варианты выполнения настоящего изобретения в общем обеспечивают множество схем или других электрических устройств. Все ссылки на схемы и другие электрические устройства и функциональные возможности, обеспечиваемые каждым из них, не предназначены для ограничения охватыванием только того, что проиллюстрировано и описано здесь. Хотя конкретные обозначения могут быть присвоены различным раскрытым схемам или другим электрическим устройствам, такие обозначения не предназначены для ограничения объема работы схем и других электрических устройств. Такие схемы и другие электрические устройства могут быть объединены друг с другом и/или отделены любым образом на основании конкретного типа электрического осуществления, которое желательно. Должно быть понятно, что любая раскрытая здесь схема или другое электрическое устройство может включать в себя любое количество микропроцессоров, интегральных схем, запоминающих устройств (например, флеш-память, оперативное запоминающее устройство (RAM), постоянное запоминающее устройство (ROM), электрически программируемое постоянное запоминающее устройство (EPROM), электрически стираемое программируемое постоянное запоминающее устройство (EEPROM), или другие их подходящие варианты) и программное обеспечение, которое взаимодействует друг с другом для выполнения операции(ий), раскрытой(ых) здесь. В дополнение, любое одно или более электрических устройств могут быть выполнены с возможностью выполнения компьютерной программы, которая выполнена на невременном машиночитаемом носителе, который запрограммирован с возможностью выполнения любого количества функций, которые раскрыты.
[0014] Изобретение относится к вычислительной системе транспортного средства, которая может помогать водителю при парковочном маневре. Вычислительная система транспортного средства может включать в себя камеру заднего вида, встроенную вблизи или на заднем бампере транспортного средства. Камера заднего вида не может фиксировать данные, относящиеся к углу видимости, которые могут улучшать помощь при парковке транспортного средства.
[0015] Например, парковочный гараж может включать в себя парковочное место. Парковочный гараж может включать в себя систему автоматизированной парковки, имеющую по меньшей мере один датчик, расположенный для фиксации данных, относящихся к парковочному месту. Данные датчика могут быть использованы для помощи при парковочном маневре транспортного средства. Система автоматизированной парковки может передавать данные датчика вычислительной системе транспортного средства через установленную линию беспроводной связи. В другом примере один или более датчиков (датчики близости, камеры, радиолокатор и т.д., например) могут обеспечивать обратную связь водителю при выполнении парковочного маневра в гараже. Один или более датчиков могут обеспечивать уведомление водителю о положении транспортного средства относительно парковочного места в гараже и/или данные, относящиеся к измерению значения расстояния от положения транспортного средства до стены гаража. Система автоматизированной парковки может передавать уведомление и данные вычислительной системе транспортного средства через установленную линию беспроводной связи. В одном примере гаражная камера может передавать данные, содержащие расстояние и/или положение транспортного средства, вычислительной системе транспортного средства с использованием линии беспроводной связи. Один или более датчиков могут обеспечивать данные, содержащие угол видимости, не доступный при использовании парковочных датчиков на транспортном средстве и/или камеры заднего вида на транспортном средстве.
[0016] Варианты выполнения настоящего изобретения в общем обеспечивают вычислительные системы транспортного средства и способы приема данных удаленного датчика для помощи при парковке. В общем вычислительная система транспортного средства может быть запрограммирована с возможностью обеспечения связи с одним или более датчиками, расположенными на или вблизи парковочного места в парковочном гараже с использованием линии беспроводной связи. Линия беспроводной связи может включать в себя, но не ограничивается, WiFi, технологию Bluetooth и/или их сочетание. Настоящее изобретение обеспечивает вычислительную систему транспортного средства способностью помогать и/или управлять парковочным маневром с использованием одного или более датчиков, расположенных вблизи парковочного места.
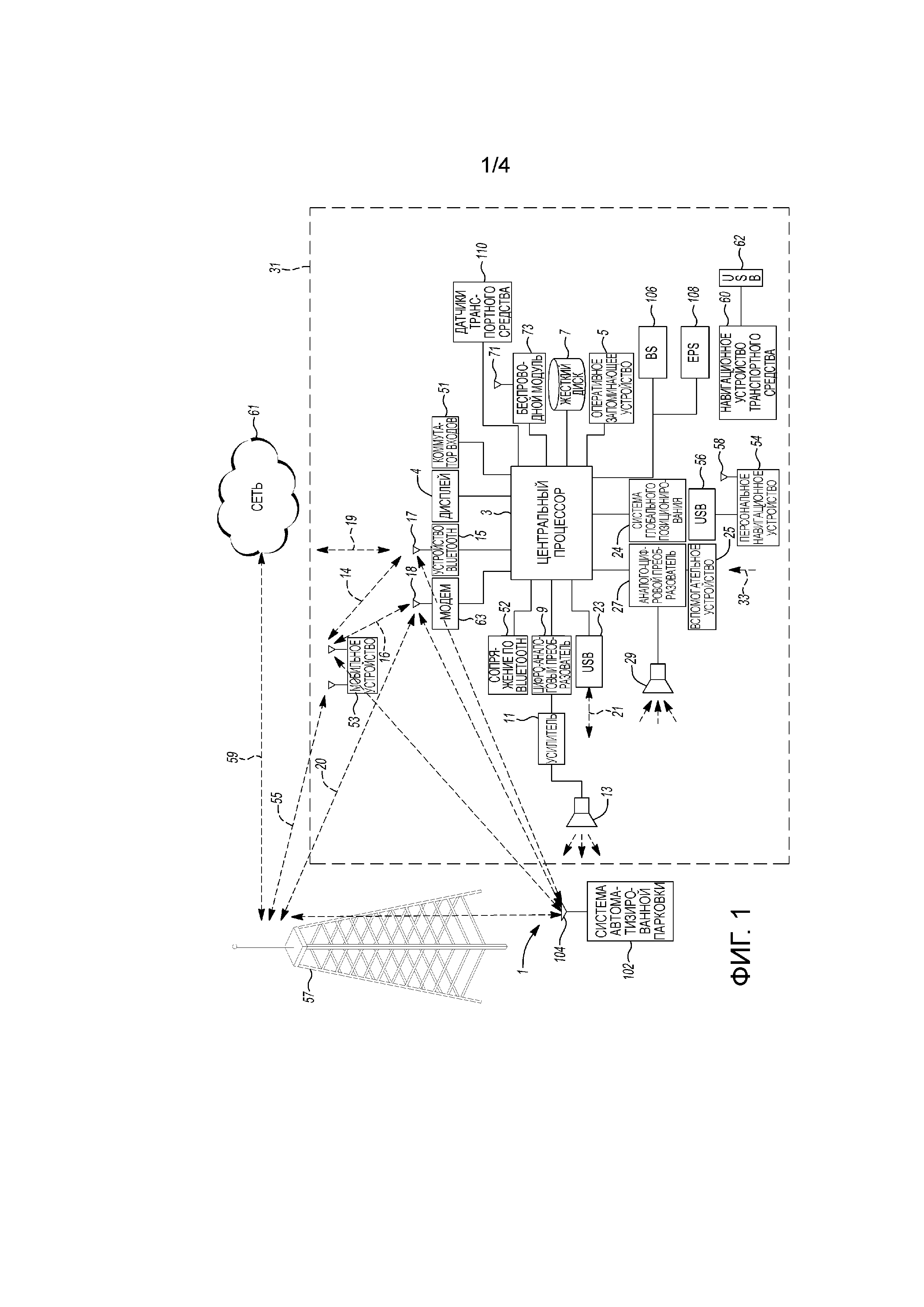
[0017] Фигура 1 иллюстрирует примерную модульную топологию для вычислительной системы 1 транспортного средства (VCS) для транспортного средства 31. Пример такой VCS 1 представляет собой систему SYNC, производимую компанией THE FORD MOTOR COMPANY. Транспортное средство, оборудованное VCS 1, может содержать визуальный интерфейс 4 в передней части, расположенный в транспортном средстве 31. Пользователь также может иметь возможность взаимодействовать с интерфейсом, если это предусмотрено, например, с помощью сенсорного экрана. В другом иллюстративном варианте выполнения взаимодействие происходит посредством нажатий кнопок и/или голосового диалога с помощью устройства автоматического распознавания речи и синтеза речи.
[0018] В иллюстративном варианте выполнения 1, показанном на Фигуре 1, процессор 3 управляет по меньшей мере некоторой частью работы вычислительной системы транспортного средства. Обеспеченный в транспортном средстве 31 процессор 3 позволяет бортовую обработку команд и подпрограмм. Дополнительно процессор 3 соединен и с устройством 5 временного хранения, и с устройством 7 постоянного хранения. В этом иллюстративном варианте выполнения устройство 5 временного хранения представляет собой оперативное запоминающее устройство (RAM), а устройство 7 постоянного хранения представляет собой жесткий диск (HDD) или флэш-память. В общем постоянная (невременная) память может включать в себя все формы памяти, которые сохраняют данные, когда компьютер или другое устройство выключается. Они включают в себя, но не ограничиваются, HDD, CD, DVD, магнитные ленты твердотельные накопители, портативные USB накопители и любую другую подходящую форму постоянной памяти.
[0019] Процессор 3 также обеспечен множеством различных устройств ввода, позволяющих пользователю взаимодействовать с процессором. В этом иллюстративном варианте выполнения обеспечены микрофон 29, вспомогательное устройство 25 ввода (для входа 33), устройство 23 USB, устройство 24 GPS, экран 4, который может представлять собой сенсорный дисплей, и устройство 15 BLUETOOTH. Также обеспечен коммутатор 51 входов, чтобы позволять пользователю выбирать между различными устройствами ввода. Входной сигнал и для микрофона, и для вспомогательного разъема преобразуется из аналогового в цифровой преобразователем 27 до передачи процессору. Хотя не показано, многочисленные компоненты транспортного средства и вспомогательные компоненты в сообщении с VCS 1 могут использовать сеть транспортного средства (например, но не ограничиваясь, шину CAN) для передачи данных в и от VCS (или ее компонентов).
[0020] Устройства вывода на систему могут включать в себя, но не ограничиваются, визуальный дисплей 4 и динамик 13 или выход для стереосистемы. Динамик 13 соединен с усилителем 11 и принимает его сигнал от процессора 3 через цифро-аналоговый преобразователь 9. Вывод также может быть осуществлен на удаленное устройство BLUETOOTH, такое как PND 54, или устройство USB, такое как навигационное устройство 60 транспортного средства, через двунаправленные потоки данных, показанные ссылочными позициями на 19 и 21 соответственно.
[0021] В одном иллюстративном варианте выполнения система 1 использует приемопередатчик 17 BLUETOOTH для связи 14 с пользовательским мобильным устройством 53 (например, мобильным телефоном, смартфоном, планшетом, PDA или любым другим устройством, имеющим возможность беспроводного удаленного сетевого соединения). Мобильное устройство (например, переносное устройство) далее может быть использовано для связи 59 с сетью 61 снаружи транспортного средства 31 через, например, связь 55 с сотовой вышкой 57. В некоторых вариантах выполнения вышка 57 может представлять собой точку доступа WiFi. Связь между мобильным устройством 53 и приемопередатчиком BLUETOOTH в общем представлена сигналом 14.
[0022] Сопряжение мобильного устройства 53 и приемопередатчика 15 BLUETOOTH может быть осуществлено посредством кнопки 52 или подобного устройства ввода. Соответственно центральный процессор (CPU) получает инструкции о том, что бортовой приемопередатчик BLUETOOTH будет сопряжен с приемопередатчиком BLUETOOTH в мобильном устройстве 53.
[0023] В другом примере мобильное устройство 53 может быть выполнено с возможностью связи с VCS 1 посредством одного или более приложений, выполняемых на аппаратном обеспечении в VCS 1. Например, процессор 3 может передавать одно или более сообщений мобильному устройству 53 посредством приемопередатчика 17 BLUETOOTH. В другом примере процессор 3 может принимать одно или более сообщений от мобильного устройства 53 посредством приемопередатчика 17 BLUETOOTH.
[0024] Данные могут передаваться между CPU 3 и сетью 61 с использованием, например, передачи информации на текущей частоте тарифного плана, на частотах выше частот передачи речи или двухтональных сигналов DTMF, связанных с мобильным устройством 53. Альтернативно может быть желательно включение бортового модема 63, имеющего антенну 18 для передачи 16 данных между CPU 3 и сетью 61 на частотах, превышающих частоту передачи речи. Таким образом, мобильное устройство 53 может быть использовано для связи 59 с сетью 61 снаружи транспортного средства 31 через, например, связь 55 с сотовой вышкой 57. В некоторых вариантах выполнения модем 63 может устанавливать связь 20 с вышкой 57 для связи с сетью 61. В качестве неограничивающего примера модем 63 может представлять собой сотовый USB-модем, а связь 20 может представлять собой сотовую связь.
[0025] В одном примере VCS 1 может быть выполнена с возможностью связи с системой 102 автоматизированной парковки снаружи транспортного средства 31 через мобильное устройство 53, бортовой модем 63, приемопередатчик 17 BLUETOOTH и/или их сочетание. Система 102 автоматизированной парковки может включать в себя беспроводной приемопередатчик 104, выполненный с возможностью приема данных от одного или более датчиков. Один или более датчиков могут измерять информацию, используемую для помощи водителю при парковке транспортного средства на парковочном месте. Система 102 автоматизированной парковки может передавать принимаемые данные от одного или более датчиков VCS 1 через беспроводной приемопередатчик 104.
[0026] В одном иллюстративном варианте выполнения процессор 3 обеспечен операционной системой, включающей в себя прикладной программный интерфейс (API) для связи с прикладным программным обеспечением модема. Прикладное программное обеспечение модема может иметь доступ к встроенному модулю или микропрограммному обеспечению на приемопередатчике BLUETOOTH для выполнения беспроводной связи с удаленным приемопередатчиком BLUETOOTH (таким как в мобильном устройстве). Bluetooth представляет собой подмножество протоколов IEEE 802 PAN (персональная сеть). Протоколы IEEE 802 LAN (локальная вычислительная сеть) включают в себя WiFi и имеют широкие межфункциональные возможности с IEEE 802 PAN. Оба из них подходят для беспроводной связи в транспортном средстве. Другое средство связи, которое может быть использовано в этой области, представляет собой оптическую связь в свободном пространстве (такую как IrDA) и нестандартизированные пользовательские инфракрасные (IR) протоколы.
[0027] В другом варианте выполнения мобильное устройство 53 включает в себя модем для передачи данных на тональной частоте или широкополосной передачи данных. В варианте выполнения, где обмен данными происходит на частотах выше частот передачи речи, может быть осуществлена технология, известная как частотное мультиплексирование, при которой пользователь мобильного устройства может говорить во время того, как устройство передает данные. В других случаях, когда пользователь не использует устройство, передача данных может использовать весь диапазон частот (от 300 Гц до 3,4 кГц в одном примере). Хотя частотное мультиплексирование может быть общим для аналоговой сотовой связи между транспортным средством и интернетом, и все еще используется, оно в значительной степени заменяется гибридами множественного доступа с кодовым разделением (CDMA), множественного доступа с временным разделением (TDMA) и множественного доступа с пространственным разделением (SDMA) для цифровой сотовой связи. Они все являются совместимыми стандартами ITU IMT-2000 (3G) и предлагают скорости передачи данных до 2 Мбит/с для неподвижных или идущих пользователей и 385 кбит/с для пользователей в перемещающемся транспортном средстве. Стандарты 3G сейчас заменяются IMT-Advanced (4G), который обеспечивает 100 Мбит/с для пользователей в транспортном средстве и 1 Гбит/с для неподвижных пользователей. Если пользователь имеет тарифный план, связанный с мобильным устройством, возможно, что тарифный план обеспечивает передачу данных в диапазоне широких частот, и система может использовать гораздо более широкий диапазон частот (увеличивая скорость передачи данных). В еще одном варианте выполнения мобильное устройство 53 заменено устройством сотовой связи, которое установлено на транспортном средстве 31. В еще одном варианте выполнения мобильное устройство (например, мобильное устройство, проиллюстрированное как ND 53), может представлять собой устройство беспроводной локальной вычислительной сети (LAN) с возможностью связи, например (и без ограничения), с сетью 802.11g (т.е. WiFi) или сетью WiMAX.
[0028] В одном варианте выполнения входные данные могут быть переданы через мобильное устройство 53 на частоте выше частоты передачи речи или на текущей частоте тарифного плана через бортовой приемопередатчик BLUETOOTH и во внутренний процессор 3 транспортного средства. В случае некоторых временных данных, например, данные могут храниться на HDD или другом запоминающем носителе 7 до тех пор, пока данные больше не будут необходимы.
[0029] Дополнительные источники, которые могут взаимодействовать с транспортным средством, включают в себя персональное навигационное устройство 54, имеющее, например, USB соединение 56 и/или антенну 58, навигационное устройство 60 транспортного средства, имеющее USB 62 или другое соединение, бортовое устройство 24 GPS или удаленную навигационную систему (не показана), имеющую возможность соединения с сетью 61. USB является одним из класса последовательных сетевых протоколов. Последовательные протоколы IEEE 1394 (FireWire™ (Apple), i.LINK™ (Sony) и Lynx™ (Texas Instruments)), EIA (Electronics Industry Association), IEEE 1284 (Centronics Port), S/PDIF (Sony/Philips Digital Interconnect Format) и USB-IF (USB Implementers Forum) формируют основу стандартов последовательной передачи данных устройство-устройство. Большинство протоколов могут быть осуществлены либо для электрической, либо для оптической связи.
[0030] Дополнительно CPU может находиться в сообщении с множеством других процессоров и датчиков транспортного средства, связанными с одной или более встроенными системами транспортного средства. Например, CPU 3 может находиться в сообщении с тормозной системой (BS) 106, системой (EPS) 108 электроусиления рулевого управления, модулем управления коробкой передач и/или модулем управления двигателем. Эти системы могут находиться в сообщении с CPU 3 через сетевое соединение транспортного средства. Датчики 110 транспортного средства, связанные с одной или более системами, могут отслеживать работу транспортного средства. Датчики 110 транспортного средства могут включать в себя ультразвуковые датчики, камеру заднего вида, камеру переднего вида, датчики расстояния, которые обнаруживают объекты вокруг транспортного средства, акселерометры, датчики положения и т.д. Датчики 110 транспортного средства могут принимать данные о работе транспортного средства, включая, но не ограничиваясь, угол поворота рулевого колеса, положение акселератора, положение педали тормоза, скорость транспортного средства, работа рычага переключения передач (режим парковки, режим заднего хода, режим движения вперед и нейтральный режим) и т.д.
[0031] Также или альтернативно CPU может быть соединен с беспроводным маршрутизатором 73 транспортного средства с использованием, например, приемопередатчика 71 WiFi (IEEE 803.11). Это может позволять CPU соединяться с удаленными сетями в диапазоне локального маршрутизатора 73.
[0032] В дополнение к имеющимся различным процессам, выполняемым вычислительной системой транспортного средства, расположенной в транспортном средстве, в некоторых вариантах выполнения процессы могут выполняться вычислительной системой в сообщении с вычислительной системой транспортного средства. Такая система может включать в себя, но не ограничивается, беспроводное мобильное устройство 53 (мобильный телефон, например), удаленную вычислительную систему (сервер, например), подсоединенную посредством беспроводного устройства, или систему 102 автоматизированной парковки. Совместно такие системы могут называться связанные вычислительные системы (VACS)транспортного средства. В некоторых вариантах выполнения конкретные компоненты VACS могут выполнять конкретные части процесса в зависимости от конкретного осуществления системы. Путем примера, а не ограничения, если процесс включает в себя отправку или прием информации с сопряженным беспроводным устройством, то вероятно, что беспроводное устройство не выполняет процесс, так как беспроводное устройство не будет «отправлять и принимать» информацию с самим собой. Специалисту в области техники будет понятно, когда нецелесообразно применять конкретные VACS для данного решения. Во всех решениях предполагается, что по меньшей мере вычислительная система транспортного средства (VCS) в сообщении с одной или более системами, расположенными в транспортном средстве, сама способна выполнять типичные процессы.
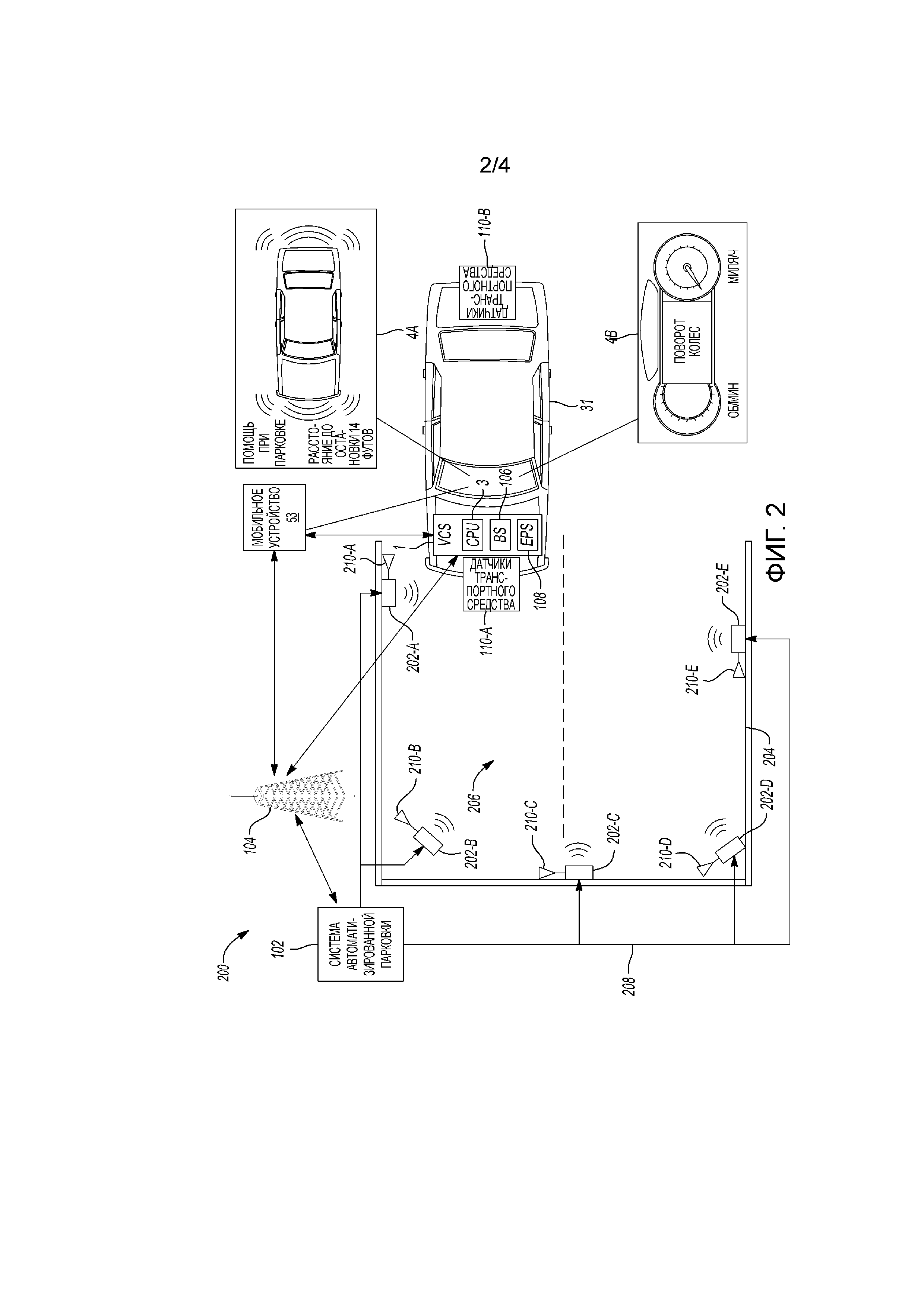
[0033] Фигура 2 представляет собой типичную модульную топологию 200 системы 102 автоматизированной парковки, сообщающейся с VCS 1, согласно варианту выполнения. Как показано, Фигура 2 иллюстрирует систему и способ помощи водителю при маневре транспортного средства 31 на парковочное место 206. Система 102 автоматизированной парковки включает в себя один или более датчиков 202-A-202-E (совместно 202), прикрепленных к по меньшей мере одной стене 204 и/или потолку парковочной конструкции. Один или более датчиков 202 могут включать, но не ограничиваются, камеру, лазерный датчик, инфракрасный датчик, ультразвуковой датчик, датчик близости и/или их сочетание. Один или более датчиков 202 могут быть расположены вблизи парковочного места 206 для обеспечения парковочных данных транспортного средства в VCS 1 посредством системы 102 автоматизированной парковки. Система 102 автоматизированной парковки может сообщаться с одним или более датчиками 202 с использованием проводной 208 и/или беспроводной связи 210-A-210-E (совместно 210).
[0034] Система 102 автоматизированной парковки может включать в себя приемопередатчик 104, выполненный с возможностью установления связи с VCS 1. Приемопередатчик 104 системы автоматизированной парковки может устанавливать локальное сетевое соединение с одним или более датчиками 202, VCS 1 и/или их сочетанием. В другом примере приемопередатчик 104 системы автоматизированной парковки может устанавливать сеть глобальной системы мобильной связи (GSM) для передачи данных, принимаемых от одного или более датчиков 202 в VCS 1.
[0035] Например, VCS 1 может устанавливать связь через беспроводное соединение с системой 102 автоматизированной парковки на основании транспортного средства 31, входящего в заданную близость с парковочной конструкцией. Беспроводная связь может включать в себя сопряжение по BLUETOOTH между системой 102 автоматизированной парковки, VCS 1, мобильным устройством, сообщающимся с VCS 1, и/или их сочетанием. В одном примере система 102 автоматизированной парковки может включать в себя сеть GSM так, что VCS 1 и/или мобильное устройство 53 в сообщении с VCS 1 могут устанавливать соединение через приемопередатчик 104 на основании заданной близости. Заданная близость может быть основана на значении, связанном с измеренным расстоянием между транспортным средством 31 и парковочным местом 206. Например, система автоматизированной парковки может инициировать связь с VCS 1, когда расстояние между парковочным местом 206 и транспортным средством 31 меньше заданной близости. В другом примере VCS 1 может инициировать связь с системой 102 автоматизированной парковки, когда расстояние между парковочным местом 206 и транспортным средством 31 меньше заданной близости.
[0036] VCS 1 выполнена с возможностью связи с одним или более удаленными датчиками 202 для помощи при маневре вождения для парковки транспортного средства 31 на парковочном месте 206. Например, домашний гараж может включать в себя один или более датчиков 202, прикрепленных к стене(ам) 204 гаража. Один или более датчиков 202 могут быть расположены для фиксации данных об определенном угле и/или расстоянии, связанных с управлением транспортным средством на парковочном месте 206. Один или более датчиков 202 могут передавать данные системе 102 автоматизированной парковки. Система 102 автоматизированной парковки может принимать данные от датчиков 202 через приемопередатчик 104 и/или проводное соединение 208.
[0037] VCS 1 может принимать данные датчика, встроенные в беспроводные сигналы, передаваемые от приемопередатчика 104 системе 102 автоматизированной парковки. VCS 1 может извлекать и обрабатывать данные системы автоматизированной парковки, принимаемые из беспроводных сигналов посредством процессора 3. Процессор 3 может содержать одну или более программ программного обеспечения для управления и/или помощи при парковочном маневре транспортного средства на парковочном месте 206. Например, процессор 3 может быть выполнен с возможностью передачи данных системы автоматизированной парковки тормозной системе 106 и системе (EPS) 108 электроусиления рулевого управления. Тормозная система 106 может управлять торможением транспортного средства на основании данных, принимаемых от системы 102 автоматизированной парковки. EPS 108 может управлять рулевым управлением транспортного средства на основании данных, принимаемых от системы 102 автоматизированной парковки.
[0038] Например, VCS 1 может принимать парковочные данные от датчиков 110 транспортного средства для вычисления текущего положения и рабочего состояния транспортного средства. В ответ на данные, принимаемые от системы 102 автоматизированной парковки, VCS 1 может вычислять обновленное текущее положение и рабочее состояние транспортного средства 31. Например, VCS 1 может вычислять траекторию транспортного средства из начального положения помощи при парковке в целевое парковочное положение с использованием датчиков 110 транспортного средства. VCS 1 может обновлять траекторию транспортного средства на основании данных, принимаемых от системы 102 автоматизированной парковки. Обновленная траектория транспортного средства может обеспечивать траекторию парковки с наименьшим количеством поворотов, когда VCS 1 выполняет парковочный маневр в целевое парковочное положение на парковочном месте 206.
[0039] Датчики 110 транспортного средства (например, ультразвуковые датчики), встроенные на внешней периферии транспортного средства 31, могут обнаруживать объекты вокруг транспортного средства 31 на основании отраженных волн. VCS 1 может принимать данные, которые включают в себя информацию об обнаруженном объекте на парковочном месте 206, от системы 102 автоматизированной парковки. Обнаруженный объект может включать в себя информацию о парковочном месте, такую как парковочные линии, данные о конструкции (стены, ограждения, например), транспортные средства, припаркованные рядом с парковочным местом, и/или неопознанные объекты (детские игрушки, велосипеды и т.д., например). Данные об обнаруженных объектах, измеренные датчиками 202 системы автоматизированной парковки, не могут быть обнаружены датчиками 110 транспортного средства. Например, объект, обнаруженный системой 102 автоматизированной парковки, может быть обнаружен датчиками 110 транспортного средства позже в процессе парковки, вызывая перенастройку помощи при парковке или вычисление скорректированной траектории транспортного средства. Система 102 автоматизированной парковки может обеспечивать VCS 1 информацией, необходимой для вычисления траектории парковки для помощи при парковке транспортного средства 31 до того, как транспортное средство въезжает и/или приближается к парковочному месту 206.
[0040] Например, передний датчик 110-A транспортного средства не может обнаруживать объект, расположенный вне диапазона датчика. Если транспортное средство 31 параллельно парковочному месту 206, передний датчик 110-A транспортного средства не способен обнаруживать объект на парковочном месте 206. В связи с этим датчик 202 системы автоматизированной парковки может быть выполнен с возможностью обеспечения данных о расстоянии и угле обнаруженного объекта до того, как транспортное средство въезжает и/или приближается к парковочному месту 206. В другом примере задний датчик 110-B транспортного средства не способен обнаруживать объект на парковочном месте 206, если транспортное средство обращено вперед к парковочному месту 206. В связи с этим датчик 202 системы автоматизированной парковки может обеспечивать данные в VCS 1, пока датчики 110 транспортного средства не имеют возможность обнаружения объекта и/или вычисления траектории парковки для парковочного места 206.
[0041] EPS 108 может вычислять команды управления рулевым колесом на основании данных от по меньшей мере одного из системы 102 автоматизированной парковки, датчика 110 транспортного средства и/или их сочетания. EPS 108 может обеспечивать управление рулевым колесом без ввода данных водителя на основании вычисленного управления рулевым колесом. Для помощи водителю при парковке EPS 108 может обеспечивать предупреждения в виде сопротивления и/или вибрации (например, тактильный датчик, встроенный в рулевое колесо) рулевому колесу для предупреждения водителя об обнаруженном объекте и/или вычислении траектории парковки во время парковочного рулевого маневра на парковочное место 206. EPS 108 может быть выполнена с возможностью позволять пользователю транспортного средства вручную отменять автоматическое управление рулевым управлением на основании ручного поворота рулевого колеса.
[0042] VCS 1 может принимать измеренное значение расстояния для расстояния от обнаруженного объекта до транспортного средства 31 посредством датчиков 110 транспортного средства. Система 102 автоматизированной парковки может измерять значение расстояния транспортного средства на основании транспортного средства 31, обнаруженного объекта и/или их сочетания. Например, датчик 202 системы автоматизированной парковки может измерять расстояние до обнаруженного объекта относительно парковочного места 206 и транспортного средства 31. Датчик 202 системы автоматизированной парковки может передавать сообщение с данными в VCS 1 для управления тормозной системой 106 на основании расстояния до обнаруженного объекта относительно парковочного места 206 и транспортного средства 31. В ответ на сравнение VCS 1 данных об измеренном расстоянии с заданным пороговым значением расстояния остановки VCS 1 может передавать сообщение тормозной системе 106 для применения тормоза. Тормозная система 106 может быть выполнена с возможностью позволять пользователю транспортного средства вручную отменять автоматическое управление тормозом VCS 1 на основании нажатия пользователем транспортного средства педали тормоза.
[0043] Дополнительно VCS 1 может быть выполнена с возможностью вывода информации для помощи при парковке на дисплей 4. Дисплей 4 может включать в себя, но не ограничивается, дисплей 4А пользовательского интерфейса на центральной консоли и дисплей 4B на приборной панели. VCS 1 может выводить рабочие инструкции транспортного средства, посредством которых данные для помощи при парковке могут обеспечивать водителю вычисленные траектории транспортного средства. Как показано на фигуре 2, дисплей 4А пользовательского интерфейса на центральной консоли отображает расстояние до остановки транспортного средства в парковочном целевом положении. В одном примере водитель может быть уведомлен с использованием дисплея 4А пользовательского интерфейса на центральной консоли, что транспортное средство может автоматически останавливаться, когда расстояние до парковочного целевого положения равно заданному пороговому значению. В другом варианте выполнения расстояние до значения остановки может обеспечивать инструкции водителю для помощи при парковке транспортного средства на парковочном месте 206.
[0044] Дисплей 4B на приборной панели представляет рулевое направление и угол поворота рулевого колеса. Так как работа транспортного средства представлена на дисплее 4B, водитель может понимать содержание операций транспортного средства, имеющих место во время парковочного маневра. Устройство 4 отображения, например, расположено в положении (в приборной панели 4B, центральной консоли 4А и т.д.), в котором водитель может его видеть внутри кабины транспортного средства. Дополнительно устройство 4 отображения может отображать водителю произвольную информацию, такую как информация датчиков (температура наружного воздуха, текущее время, например) из информации VCS 1 транспортного средства, информацию о положении посредством датчиков 110 транспортного средства и информацию датчика 202 системы автоматизированной парковки. Конкретнее, дисплей 4 может отображать парковочное целевое положение, траектории для направления транспортного средства системой помощи при парковке в парковочное целевое положение, способ работы транспортного средства для перемещения транспортного средства системой помощи при парковке в парковочное целевое положение и расстояние от транспортного средства до парковочного целевого положения, которое вычислено посредством VCS 1.
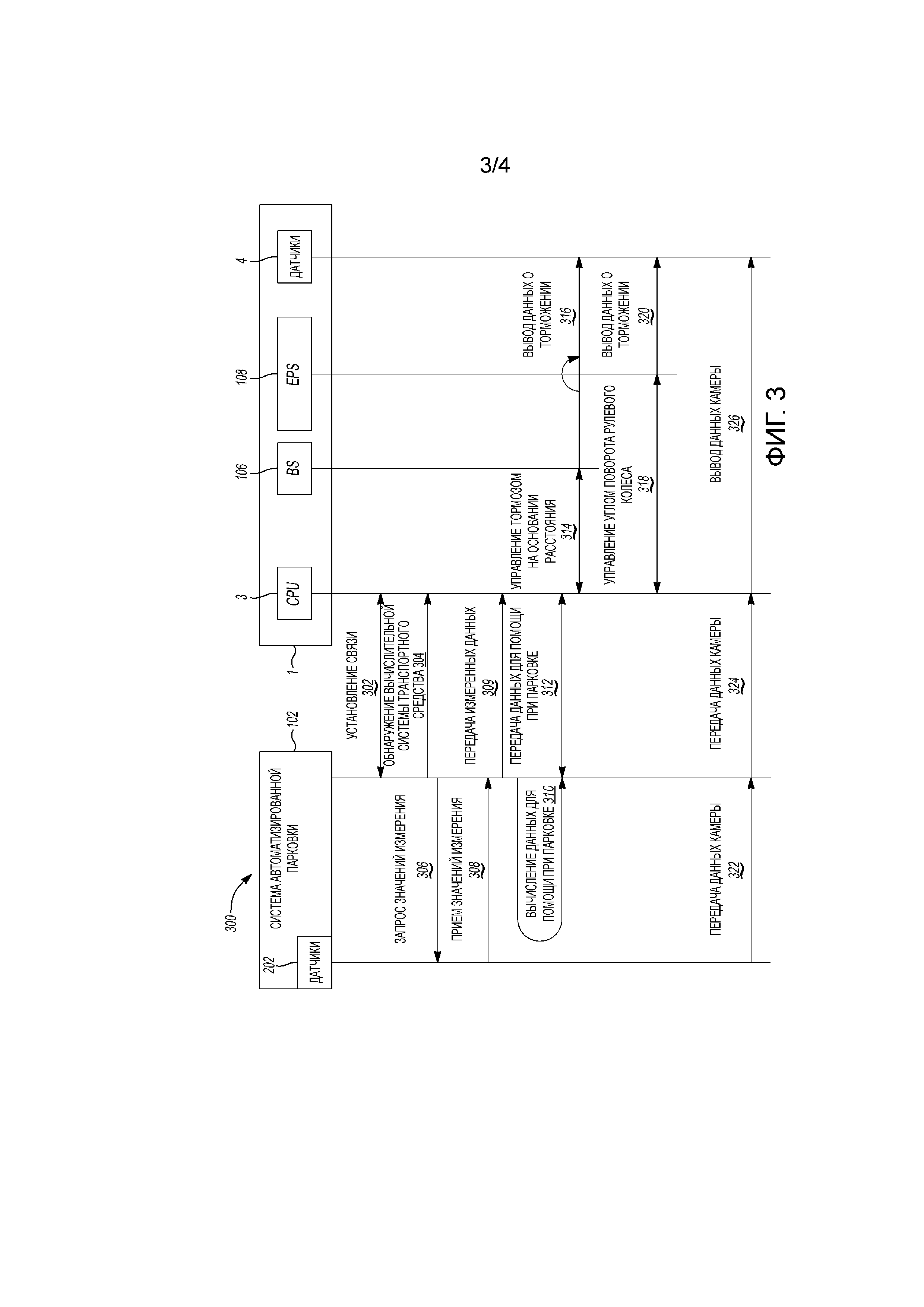
[0045] Фигура 3 представляет собой блок-схему 300, иллюстрирующую VCS 1, сообщающую парковочную информацию одной или более подсистемам на основании данных, принимаемых от системы 102 автоматизированной парковки, согласно варианту выполнения. Одна или более подсистем включают в себя, но не ограничиваются, тормозную систему 106 и EPS 108. VCS 1 может принимать информацию для помощи при парковке от системы 102 автоматизированной парковки. VCS может вычислять траекторию транспортного средства из начального положения помощи при парковке в парковочное целевое положение на основании принимаемой информация для помощи при парковке. VCS 1 может передавать одно или более сообщений для помощи при парковочном маневре на парковочное место на основании вычисленной траектории транспортного средства.
[0046] VCS 1 может устанавливать связь с системой 102 автоматизированной парковки посредством процесса 302 квитирования. Процесс 302 квитирования может включать в себя последовательность прямых и обратных связей между VCS 1 и системой 102 автоматизированной парковки с целью аутентификации доступа к системе. Если квитирование завершается, VCS 1 может принимать данные от приложения для помощи при парковке, выполняемого на системе 102 автоматизированной парковки. Например, процесс квитирования может включать в себя обмен информацией для обнаружения, сопряжена ли система 102 автоматизированной парковки с VCS 1. В другом примере VCS может выполнять приложение, связанное с системой 102 автоматизированной парковки. Приложение может иметь ключ, выполненный с возможностью подтверждения, что VCS 1 авторизована для связи с системой 102 автоматизированной парковки.
[0047] Система 102 автоматизированной парковки может обнаруживать VCS 304 с использованием нескольких способов, включающих в себя мощность сигнала установленного соединения связи, обнаружение транспортного средства посредством датчика 202 и/или их сочетание. В ответ на обнаруженную VCS 1 система 102 автоматизированной парковки может запрашивать значения 306 измерения, относящиеся к парковочному месту 206, с использованием одного или более датчиков 202. Система 102 автоматизированной парковки может принимать значения 308 измерения посредством одного или более датчиков 202. VCS 1 может принимать значения 309 измерения от одного или более датчиков 202 посредством системы 102 автоматизированной парковки.
[0048] В одном примере система 102 автоматизированной парковки может вычислять данные 310 для помощи при парковке, которые включают в себя траектории транспортного средства, обнаружение объектов, парковочное целевое положение и размер парковочного места. В другом примере система 102 автоматизированной парковки может передавать измеренные данные от одного или более датчиков 202 VCS 1 так, что обработка траектории транспортного средства выполняется на VCS 1. Система 102 автоматизированной парковки может передавать вычисленные данные 312 для помощи при парковке в VCS 1.
[0049] VCS 1 может принимать данные для помощи при парковке от системы 102 автоматизированной парковки. VCS 1 может вычислять одну или более переменных для помощи при парковке для управления парковочным маневром транспортного средства на парковочное место. Например, VCS 1 может вычислять значение расстояния от транспортного средства до парковочного целевого положения на основании данных для помощи при парковке. В ответ на значение расстояния до парковочного целевого положения VCS 1 может передавать сообщение 314 управления тормозом тормозной системе. Сообщение управления тормозом может запрашивать включение тормоза на основании значения расстояния, опускающегося ниже заданного порогового значения. VCS может выводить сообщение управления тормозом и/или данные 316 на дисплей 4.
[0050] В другом примере в ответ на данные 312 для помощи при парковке от системы 102 автоматизированной парковки VCS 1 может вычислять один или более поворотов рулевого колеса на основании траектории транспортного средства. VCS 1 может передавать сообщение 318 управления рулевым колесом в EPS 108. Сообщение 318 управления рулевым колесом может запрашивать перемещение угла рулевого колеса на основании данных для помощи при парковке. VCS 1 может выводить сообщение управления рулевым колесом и/или данные 320 на дисплей 4.
[0051] Один или более датчиков 202 для системы 102 автоматизированной парковки могут включать в себя камеру 202, расположенную на парковочном месте 206. Камера 202 может передавать данные 322 камеры о парковочном месте системе 102 автоматизированной парковки. Система автоматизированной парковки может передавать данные 324 камеры в VCS 1 через соединение беспроводной связи. VCS 1 может выводить данные камеры на дисплей 4. Например, дисплей может быть выполнен с возможностью позволять водителю просматривать изображение камеры 202, принимаемое от системы 102 автоматизированной парковки. В другом примере VCS 1 может принимать данные камеры и вычислять одну или более переменных для помощи при парковке для управления парковочным маневром транспортного средства на парковочном месте 206.
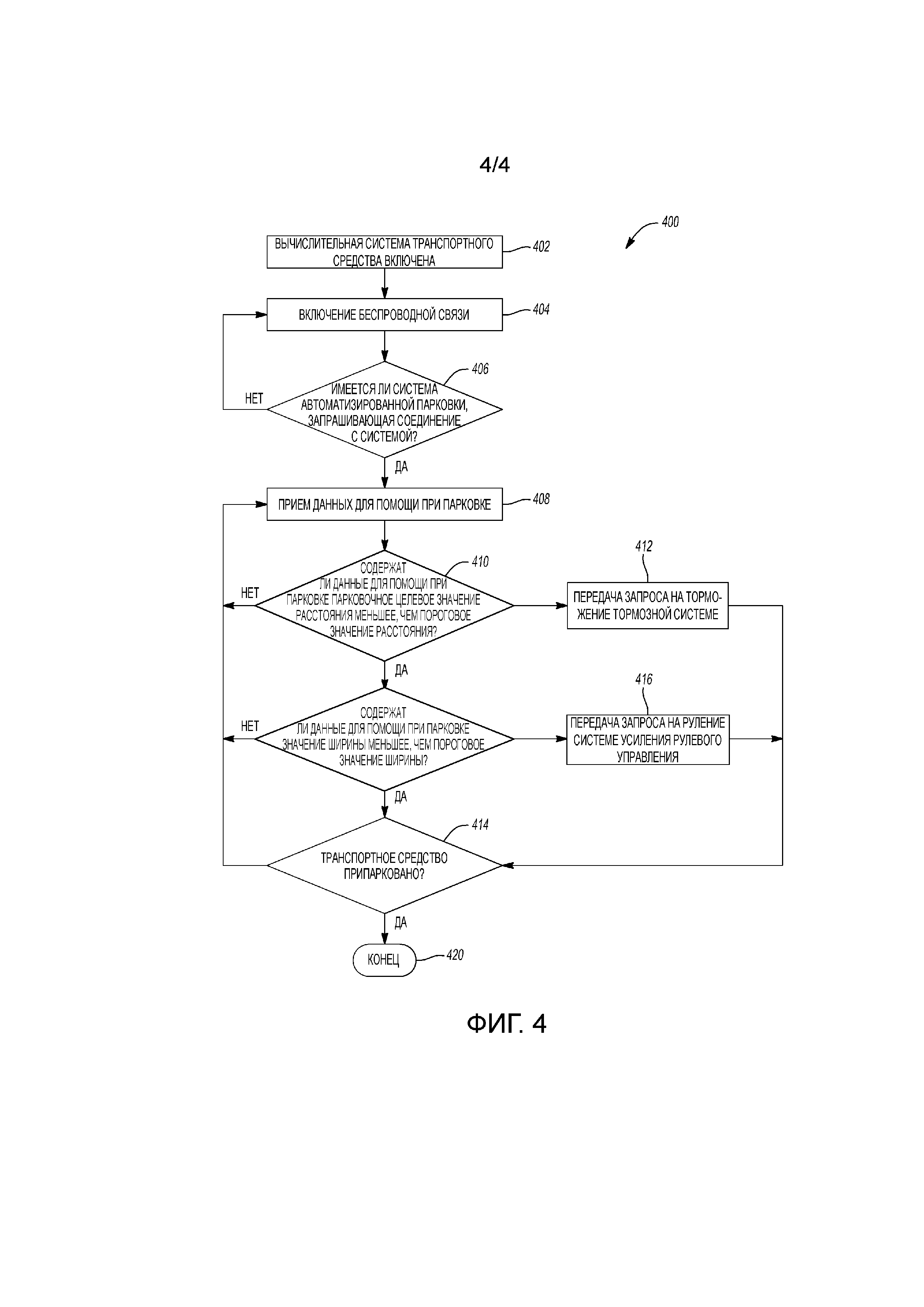
[0052] Фигура 4 представляет собой блок-схему, иллюстрирующую вычислительную систему транспортного средства, осуществляющую парковку транспортного средства на основании данных, принимаемых от системы автоматизированной парковки, согласно варианту выполнения. Способ 400 может быть осуществлен с использованием кода программного обеспечения, содержащегося в VCS 1. В других вариантах выполнения способ 400 может быть осуществлен в других контроллерах транспортного средства, распределен среди множества контроллеров транспортного средства или выполнен на удаленном контроллере в сообщении с VCS 1.
[0053] Со ссылкой на Фигуру 4 транспортное средство и его компоненты, проиллюстрированные на Фигуре 1, Фигуре 2 и Фигуре 3, упоминаются по всему обсуждению способа 400 для облегчения понимания различных аспектов настоящего изобретения. Способ 400 помощи водителю при парковке транспортного средства с использованием удаленных датчиков может быть осуществлен с помощью компьютерного алгоритма, исполняемого машиной кода или инструкций программного обеспечения, запрограммированных на подходящее(ие) программируемое(ые) логическое(ие) устройство(а) транспортного средства, такое как модуль управления транспортным средством, модуль управления устройством, другой контроллер в сообщении с вычислительной системой транспортного средства или их сочетание. Хотя различные этапы, показанные в блок-схеме 400, представлены как происходящие в хронологической последовательности, по меньшей мере некоторые этапы могут осуществляться в другом порядке, а некоторые этапы могут выполняться одновременно или не выполняться.
[0054] На этапе 402 VCS 1 может быть запущена и включена на основании включенного положения системы зажигания. VCS 1 может запускать выполнение одного или более приложений для помощи при парковке. В ответ на запуск VCS 1 система может обеспечивать приемопередатчик беспроводной связи на этапе 404. VCS 1 может искать систему 102 автоматизированной парковки, запрашивающую соединение с системой, на этапе 406. Если VCS 1 не обнаруживает систему 102 автоматизированной парковки, запрашивающую соединение, то система может продолжать выводить сообщение беспроводной связи посредством приемопередатчика.
[0055] Если система 102 автоматизированной парковки обнаружена, то VCS 1 может совершать попытки соединения с использованием линии беспроводной связи посредством приемопередатчика. Линия связи может включать в себя технологию беспроводной связи (Bluetooth, Bluetooth с низким энергопотреблением, WiFi и т.д., например). В ответ на линию связи с системой 102 автоматизированной парковки VCS 1 может принимать данные для помощи при парковке на этапе 408. VCS 1 может вычислять парковочное целевое значение расстояния и/или значение ширины парковочного места 206 на основании данных для помощи при парковке. Парковочное целевое значение расстояния может включать в себя длину парковочного места и текущее положение транспортного средства относительно длины. Значение ширины может включать в себя ширину парковочного места и текущее положение транспортного средства относительно ширины.
[0056] На этапе 410 VCS 1 может сравнивать парковочное целевое значение расстояния с пороговым значением расстояния. Если парковочное целевое значение расстояния меньше, чем пороговое значение расстояния, то VCS 1 может передавать запрос на торможение тормозной системе на этапе 412. VCS 1 может продолжать прием данных для помощи при парковке, если парковочное целевое значение расстояния больше, чем пороговое значение расстояния.
[0057] Например, если парковочное место расположено в гараже, целевое значение расстояния может включать в себя текущее положение транспортного средства относительно стены гаража, обращенной к передней части транспортного средства. В ответ на целевое значение расстояния, содержащее текущее положение транспортного средства относительно стены гаража, пороговое значение расстояния может быть равно заданному значению расстояния, оставляя транспортное средство на определенном расстоянии от стены гаража. VCS 1 может быть выполнена с возможностью остановки транспортного средства посредством тормозной системы на основании целевого значения расстояния меньшего, чем пороговое значение расстояния.
[0058] На этапе 414 VCS 1 может сравнивать значение ширины с пороговым значением ширины. Если значение ширины меньше порогового значения ширины, VCS 1 может передавать запрос на поворот рулевого колеса в EPS в операции 416.
[0059] Продолжая приведенный выше пример, гараж может иметь пороговое значение ширины парковочного места. Значение ширины парковочного места может включать в себя текущее положение транспортного средства относительно порогового значения ширины парковочного места. В ответ на пороговое значение ширины, содержащее текущее положение транспортного средства относительно парковочного места, пороговое значение ширины может быть равно заданному значению ширины, оставляя транспортное средство в определенном положении (для предотвращения транспортного средства от удара о боковую стену гаража или автомобиль, припаркованный рядом с парковочным местом, например). VCS 1 может быть выполнена с возможностью поворота рулевого колеса транспортного средства на основании значения ширины меньшего, чем пороговое значение ширины.
[0060] На этапе 418 VCS 1 может вычислять текущее положение транспортного средства на основании целевого значения расстояния и значения ширины, принимаемых от системы 102 автоматизированной парковки. Если VCS 1 вычисляет, что транспортное средство не припарковано на парковочном месте на основании порогового значения расстояния, порогового значения ширины и/или их сочетания, система может продолжать прием данных для помощи при парковке от системы 102 автоматизированной парковки на этапе 408. Если VCS 1 вычисляет, что транспортное средство находится в припаркованном положении на парковочном месте, система может запрашивать выбор коробкой передач парковочного положения. В ответ на парковочное положение VCS 1 может завершать способ 400 на этапе 420.
[0061] Хотя выше описаны примерные варианты выполнения, не должно предполагаться, что эти варианты выполнения описывают все возможные формы, охватываемые формулой изобретения. Слова, используемые в описании, являются словами описания, а не ограничения, и должно быть понятно, что различные изменения могут быть выполнены без отклонения от замысла и объема охраны изобретения. Как ранее описано, признаки различных вариантов выполнения могут быть объединены для образования дополнительных вариантов выполнения изобретения, которые могут быть явно не описаны или не проиллюстрированы. Хотя различные варианты выполнения могут быть описаны как обеспечивающие преимущества или являющиеся предпочтительными относительно других вариантов выполнения или известных в уровне техники осуществлений относительно одной или более желаемых характеристик, специалисту в области техники понятно, что один или более признаков или характеристик могут быть объединены для достижения желаемых свойств всей системы, которые зависят от конкретного применения и осуществления. Эти свойства могут включать, но не ограничиваясь, стоимость, прочность, долговечность, затраты за срок службы, конкурентоспособность, внешний вид, упаковку, размер, удобство эксплуатации, вес, технологичность, простоту сборки и т.д. В связи с этим варианты выполнения, описанные как менее желательные, чем другие варианты выполнения или осуществления известного уровня техники в отношении одной или более характеристик не выходят за пределы объема охраны изобретения и могут быть желательны для особых применений.
Реферат
Изобретение относится к вычислительной системе транспортного средства (ТС), сообщающейся с одним или более удаленными датчиками для помощи при парковочном маневре. Система включает в себя процессор. Процессор выполнен с возможностью установления связи с системой автоматизированной парковки, внешней по отношению к транспортному средству для помощи при парковочном маневре. Система автоматизированной парковки включает в себя датчики для обеспечения измеренного значения расстояния от объекта до ТС. При этом по меньшей мере один датчик содержит камеру. Процессор дополнительно выполнен с возможностью управления тормозной системой ТС для остановки ТС на основании измеренного значения расстояния, меньшего, чем первое заданное пороговое значение. Повышение безопасности при парковке. 3 н. и 12 з.п. ф-лы, 4 ил.
Комментарии