Способ управления движением транспортного средства и устройство управления движением - RU2758918C1
Код документа: RU2758918C1
Чертежи


























Описание
[Область техники, к которой относится изобретение]
[0001]
Настоящее изобретение относится к способу управления движением и устройству управления движением транспортного средства, которые включают в себя управление автономной сменой полосы движения.
[Уровень техники]
[0002]
Известен способ, в котором при выполнении автономной смены полосы движения транспортных средств смены полос движения выполняются с уменьшением предварительно определенного поперечного ускорения или поперечной скорости при обнаружении объекта на полосе движения, на которую транспортное средство меняет полосы движения, или вблизи полосы движения (Патентный документ 1).
[Документ предшествующего уровня техники]
[Патентный Документ]
[0003]
[Патентный документ 1] публикация патента Японии №. JP 2017-100534 A
[Сущность изобретения]
[Проблемы, решаемые изобретением]
[0004]
В предшествующем уровне техники поперечное ускорение или поперечная скорость уменьшаются, чтобы не причинять дискомфорт пассажиру при смене полос движения. Следовательно, в предшествующем уровне техники не рассматривается автономная смена полосы движения на соседнюю полосу движения в том же направлении смены полосы движения два или более раз подряд, например, смена полос движения с полосы движения задействуемого транспортного средства на соседнюю полосу движения и последовательная смена полос движения с соседней полосы на следующую соседнюю полосу движения. Следовательно, когда первая смена полосы движения завершена и выполняется следующая смена полосы движения, может быть трудно проверить происходящее вокруг.
[0005]
Задача, которая должна быть решена настоящим изобретением, состоит в том, чтобы предоставить способ управления движением и устройство управления движением транспортного средства, которые смогут последовательно выполнять управление автономной сменой полосы движения, чтобы происходящее вокруг можно было надлежащим образом проверять при выполнении второй и последующих смен полосы движения на соседнюю полосу движения в той же ориентации смены полосы движения.
[Средства для решения проблем]
[0006]
Настоящее изобретение решает указанную выше проблему посредством установки поперечной скорости для выполнения управления второй и последующими автономными сменами полосы движения меньшей, чем поперечная скорость для выполнения управления первой автономной сменой полосы движения с полосы движения задействуемого транспортного средства на соседнюю полосу движения, когда управление автономной сменой полосы движения на другую соседнюю полосу движения в том же направлении смены полосы движения выполняется последовательно после того, как задействуемое транспортное средство выполняет управление первой автономной сменой полосы движения.
[Полезный эффект изобретения]
[0007]
Согласно настоящему изобретению управление второй и последующими автономными сменами полосы движения на соседнюю полосу движения в том же направлении смены полосы движения выполняется медленнее, чем выполняемое ранее управление автономной сменой полосы движения. По этой причине можно продлить период проверки происходящего вокруг. Таким образом, происходящее вокруг может быть правильно проверено до смены полосы движения.
[Краткое описание чертежей]
[0008]
Фиг.1 является блок-схемой, иллюстрирующей вариант осуществления устройства управления движением транспортного средства согласно настоящему изобретению.
Фиг.2 является схемой, иллюстрирующей пример таблицы определения обстановки, используемой для определения обстановки движения.
Фиг.3A является схемой, содержащей вид сверху, иллюстрирующий обстановку смены полосы движения на дороге, имеющей три полосы движения, согласно варианту осуществления настоящего изобретения, и график, иллюстрирующий управление поперечной скоростью согласно первому варианту осуществления устройства управления движением транспортного средства согласно настоящему изобретению.
Фиг.3B является схемой, содержащей вид сверху, иллюстрирующий обстановку смены полосы движения на дороге, имеющей четыре полосы движения, согласно варианту осуществления настоящего изобретения, и график, иллюстрирующий управление поперечной скоростью согласно первому варианту осуществления устройства управления движением транспортного средства согласно настоящему изобретению.
Фиг.3С является схемой, содержащей вид сверху, иллюстрирующий обстановку смены полосы движения согласно варианту осуществления настоящего изобретения, и график, иллюстрирующий управление поперечной скоростью, в котором поперечная скорость становится временно нулевой перед второй сменой полосы движения в первом варианте осуществления устройства управления движением транспортного средства согласно настоящему изобретению.
Фиг.3D является схемой (часть 1), содержащей вид сверху обстановки смены полосы движения согласно варианту осуществления настоящего изобретения и график, иллюстрирующий управление поперечной скоростью согласно второму варианту осуществления устройства управления движением транспортного средства согласно настоящему изобретению.
Фиг.3E является схемой (часть 2), содержащей вид сверху обстановки смены полосы движения согласно варианту осуществления настоящего изобретения и график, иллюстрирующий управление поперечной скоростью согласно второму варианту осуществления устройства управления движением транспортного средства согласно настоящему изобретению.
Фиг.3F является схемой, содержащей вид сверху обстановки смены полосы движения согласно варианту осуществления настоящего изобретения и график, иллюстрирующий управление поперечной скоростью согласно третьему варианту осуществления устройства управления движением транспортного средства согласно настоящему изобретению.
Фиг.3G является схемой, содержащей вид сверху обстановки смены полосы движения согласно варианту осуществления настоящего изобретения и график, иллюстрирующий управление поперечной скоростью согласно четвертому варианту осуществления устройства управления движением транспортного средства согласно настоящему изобретению.
Фиг.3H является графиком, иллюстрирующим управление поперечной скоростью согласно пятому варианту осуществления устройства управления движением транспортного средства согласно настоящему изобретению.
Фиг.4 является видом сверху, иллюстрирующим поперечную скорость согласно варианту осуществления настоящего изобретения.
Фиг.5A является блок-схемой (часть 1), иллюстрирующей процесс управления автономной сменой полосы движения, выполняемый устройством управления движением транспортного средства, согласно варианту осуществления настоящего изобретения.
Фиг.5B является блок-схемой (часть 2), иллюстрирующей процесс управления автономной сменой полосы движения, выполняемый устройством управления движением транспортного средства согласно варианту осуществления настоящего изобретения.
Фиг.5C является блок-схемой (часть 3), иллюстрирующей процесс управления автономной сменой полосы движения, выполняемый устройством управления движением транспортного средства согласно варианту осуществления настоящего изобретения.
Фиг.5D является блок-схемой (часть 4), иллюстрирующей процесс управления автономной сменой полосы движения, выполняемый устройством управления движением транспортного средства согласно варианту осуществления настоящего изобретения.
Фиг.5E является блок-схемой (часть 5), иллюстрирующей процесс управления автономной сменой полосы движения, выполняемый устройством управления движением транспортного средства согласно варианту осуществления настоящего изобретения.
Фиг.6А является видом сверху (часть 1) для описания способа обнаружения подходящих областей, выполняемого устройством управления движением транспортного средства согласно варианту осуществления настоящего изобретения.
Фиг.6B является видом сверху (часть 2) для описания способа обнаружения подходящих областей, выполняемого устройством управления движением транспортного средства согласно варианту осуществления настоящего изобретения.
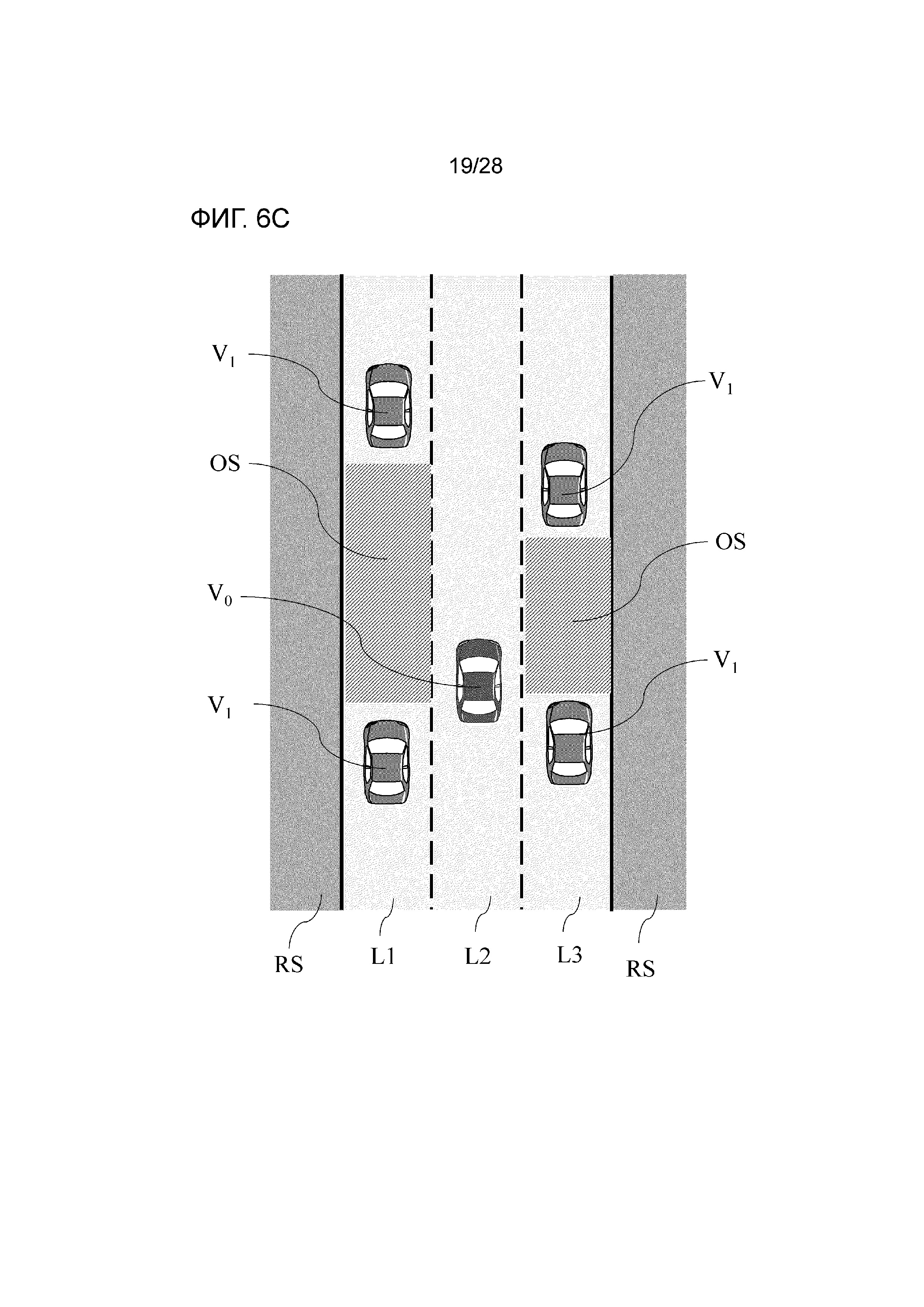
Фиг.6С является видом сверху (часть 3) для описания способа обнаружения подходящих областей, выполняемого устройством управления движением транспортного средства согласно варианту осуществления настоящего изобретения.
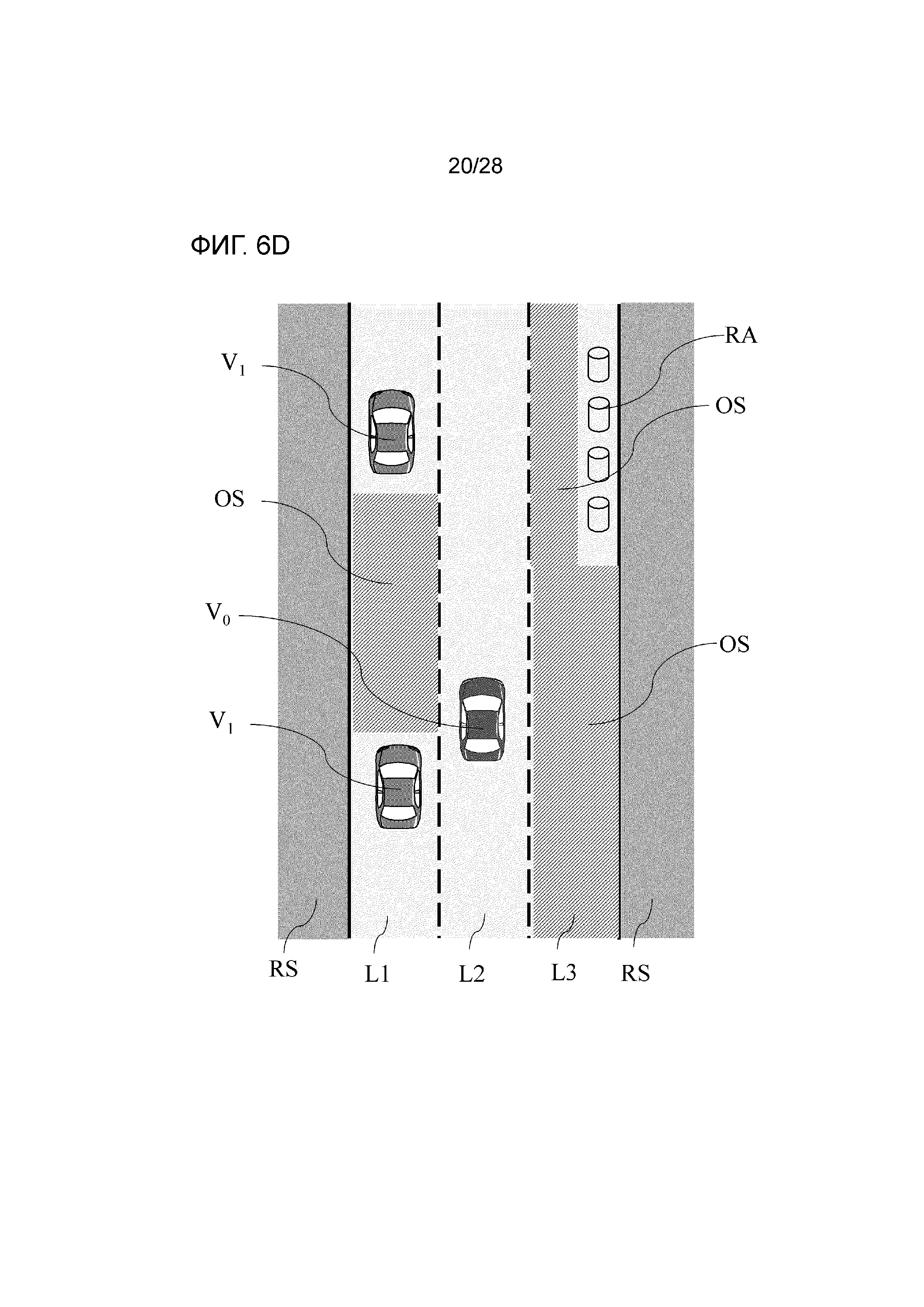
Фиг.6D является видом сверху (часть 4) для описания способа обнаружения подходящих областей, выполняемого устройством управления движением транспортного средства согласно варианту осуществления настоящего изобретения.
Фиг.6E является видом сверху (часть 5) для описания способа обнаружения подходящих областей, выполняемого устройством управления движением транспортного средства согласно варианту осуществления настоящего изобретения.
Фиг.6F является видом сверху (часть 6) для описания способа обнаружения подходящих областей, выполняемого устройством управления движением транспортного средства согласно варианту осуществления настоящего изобретения.
Фиг.7 является видом сверху для описания способа установки целевых положений для смены полосы движения, при этом способ выполняется устройством управления движением транспортного средства согласно варианту осуществления настоящего изобретения.
Фиг.8A является видом сверху (часть 1) для описания способа оценки положения другого транспортного средства по истечении требуемого времени, при этом способ выполняется устройством управления движением транспортного средства согласно варианту осуществления настоящего изобретения.
Фиг.8B является видом сверху (часть 2) для описания способа оценки положения другого транспортного средства по истечении требуемого времени, при этом способ выполняется устройством управления движением транспортного средства согласно варианту осуществления настоящего изобретения.
Фиг.9A является видом сверху (часть 1) для описания способа определения, возможна или нет смена полос движения, причем способ выполняется устройством управления движением транспортного средства согласно варианту осуществления настоящего изобретения.
Фиг.9B является видом сверху (часть 2) для описания способа определения, возможна или нет смена полос движения, причем способ выполняется устройством управления движением транспортного средства согласно варианту осуществления настоящего изобретения.
Фиг.10 является набором схем для описания взаимного расположения в направлении ширины дороги между подходящими разметками полосы движения и задействуемым транспортным средством согласно варианту осуществления настоящего изобретения.
[Вариант(ы) осуществления настоящего изобретения]
[0009]
Фиг.1 является блок-схемой, иллюстрирующей конфигурацию устройства 1 управления движением транспортного средства согласно одному или более вариантам осуществления настоящего изобретения. Устройство 1 управления движением транспортного средства согласно одному или более вариантам осуществления настоящего изобретения представляет вариант осуществления способа управления движением транспортного средства согласно настоящему изобретению. Как показано на Фиг.1, устройство 1 управления движением транспортного средства согласно одному или более вариантам осуществления настоящего изобретения включает в себя датчики 11, устройство 12 определения положения задействуемого транспортного средства, базу 13 картографических данных, бортовое оборудование 14, устройство 15 представления, устройство 16 ввода, устройство 17 связи, устройство 18 управления вождением и устройство 19 управления. Эти устройства соединены друг с другом, например, через сеть контроллеров (CAN) или другую бортовую LAN для взаимного обмена информацией.
[0010]
Датчики 11 определяют состояние движения задействуемого транспортного средства. Примеры датчиков 11 включают в себя переднюю камеру, которая захватывает изображения впереди задействуемого транспортного средства, заднюю камеру, которая захватывает изображения позади задействуемого транспортного средства, передний радар, который обнаруживает препятствия впереди задействуемого транспортного средства, задний радар, который обнаруживает препятствия позади задействуемого транспортного средства, боковые радары, которые обнаруживают препятствия, существующие с правой и левой сторон задействуемого транспортного средства, датчик скорости транспортного средства, который определяет скорость транспортного средства задействуемого транспортного средства, и бортовую камеру, которая захватывает изображения водителя. Датчики 11 могут быть представлены одним из вышеописанных различных датчиков или также могут быть выполнены в качестве сочетания двух или более датчиков. Результаты обнаружения датчиков 11 выводятся в устройство 19 управления с предварительно определенными временными интервалами.
[0011]
Устройство 12 определения положения задействуемого транспортного средства состоит из блока GPS, гиродатчика, датчика скорости транспортного средства и других компонентов. Устройство 12 определения положения задействуемого транспортного средства обнаруживает радиоволны, передаваемые от множества спутников связи с использованием блока GPS для периодического получения позиционной информации целевого транспортного средства (задействуемого транспортного средства), а также определяет текущее положение целевого транспортного средства на основе полученной позиционной информации целевого транспортного средства, информации об изменении угла, получаемой от гиродатчика, и скорости транспортного средства, получаемой от датчика скорости транспортного средства. Позиционная информация целевого транспортного средства, обнаруживаемая устройством 12 определения положения задействуемого транспортного средства, выводится в устройство 19 управления с предварительно определенными временными интервалами.
[0012]
База 13 картографических данных хранит картографическую информацию, которая включает в себя позиционную информацию различных объектов и конкретные точки. В частности, база 13 картографическая данных хранит позиционную информацию о точках слияния и точках ветвления, пунктах пропуска, положениях, в которых количество полос уменьшается, зонах обслуживания (SA)/ парковочных зонах (PA) и т.д. вместе с картографической информацией. Картографическая информация включает в себя информацию о дорогах, такую как типы дорог, ширина дорог, количество полос движения, радиусы дорог, наличие или отсутствие эксклюзивных полос для поворота вправо и влево, а также количество и ограничение скорости для отдельных полос движения. Устройство 19 управления может обращаться к картографической информации, хранящейся в базе картографических данных.
[0013]
Бортовое оборудование 14 включает в себя различные модули, оборудованные в транспортном средстве и управляемые водителем. Примеры такого бортового оборудования включают в себя средство руления, педаль акселератора, педаль тормоза, навигационное устройство, аудиоустройство, кондиционер, переключатель громкой связи, электрические стеклоподъемники, дворники, фары, мигающие указатели, звуковой сигнал и специальные переключатели. Когда водитель управляет бортовым оборудованием 14, его информация выводится на устройство 19 управления.
[0014]
Устройство 15 представления является, например, таким устройством, как дисплей навигационного устройства, дисплей, встроенный в зеркало заднего вида, дисплей, встроенный в приборную панель, проекционный дисплей, проецируемый на лобовое стекло, динамик аудиоустройства или устройство сидения с встроенными вибрирующими элементами. Устройство 15 представления предоставляет водителю информацию представления и информацию о смене полосы движения, что будет описано ниже, под управлением устройства 19 управления.
[0015]
Устройство 16 ввода представляет собой, например, устройство, такое как поворотный переключатель или сенсорная панель, расположенная на экране дисплея, с помощью которой водитель может вводить информацию вручную, или микрофон, посредством которого водитель может вводить информацию голосом. В одном или более вариантах осуществления настоящего изобретения водитель может управлять устройством 16 ввода, тем самым вводя информацию ответа в ответ на информацию представления, которая представлена устройством 15 представления. Например, в одном или более вариантах осуществления настоящего изобретения переключатели мигающих указателей или другое бортовое оборудование 14 также могут использоваться в качестве устройства 16 ввода. Более конкретно, устройство 16 ввода может быть сконфигурировано так, что водитель включает переключатель мигающего указателя, тем самым вводя согласие или разрешение на смену полос движения, в ответ на запрос того, осуществлять ли устройству 19 управления автономное выполнение смены полос движения. Информация ответа, которая вводится через устройство 16 ввода, выводится в устройство 19 управления.
[0016]
Устройство 17 связи осуществляет связь с оборудованием связи, расположенным за пределами задействуемого транспортного средства. Например, устройство 17 связи осуществляет связь по типу "транспортное средство - транспортное средство" с другим транспортным средством, осуществляет связь по типу "транспортное средство - дорога" с оборудованием, предусмотренным на обочине дороги, или осуществляет беспроводную связь с информационным сервером, предусмотренным за пределами транспортного средства, и, таким образом, может получать различные информационные данные от внешнего оборудования. Информация, получаемая устройством связи, выводится в устройство 19 управления.
[0017]
Устройство 18 управления вождением управляет движением задействуемого транспортного средства. Например, когда задействуемое транспортное средство выполняет управление движением со следованием для следования за впереди идущим транспортным средством, устройство 18 управления вождением управляет работой приводного механизма (что включает в себя работу двигателя внутреннего сгорания в случае транспортного средства с двигателем внутреннего сгорания и работу электродвигателя для движения в случае электромобиля и дополнительно включает в себя распределение крутящего момента для двигателя внутреннего сгорания и электродвигателя для движения в случае гибридного транспортного средства) и операцию торможения для обеспечения ускорения, замедления и скорости транспортного средства, с тем чтобы расстояние между задействуемым транспортным средством и впереди идущим транспортным средством поддерживалось постоянным. Дополнительно или в качестве альтернативы, когда задействуемое транспортное средство выполняет управление удержанием полосы движения, обнаруживая разметки полосы движения для полосы движения, по которой движется задействуемое транспортное средство (также называемой «полосой движения задействуемого транспортного средства», в дальнейшем), и управление положением движения задействуемого транспортного средства в направлении ширины дороги, так чтобы задействуемое транспортное средство двигалось по полосе движения задействуемого транспортного средства, или когда задействуемое транспортное средство выполняет управление автономной сменой полосы движения, такое как обгон впереди идущего транспортного средства или изменение направления движения, или когда задействуемое транспортное средство выполняет управление движением при повороте направо или налево на перекрестке и т.п. устройство 18 управления вождением выполняет управление рулевым управлением задействуемого транспортного средства посредством управления работой исполнительного механизма рулевого управления в дополнение к работе механизма привода и операции торможения для достижения ускорения, замедления, и скорости транспортного средства. Устройство 18 управления вождением управляет движением задействуемого транспортного средства в соответствии с командами от устройства 19 управления, которые будут описаны ниже. Любой из других хорошо известных способов также может использоваться в качестве способа управления движением, выполняемого устройством 18 управления вождением.
[0018]
Устройство 19 управления состоит из постоянного запоминающего устройства (ROM), в котором хранятся программы для управления движением задействуемого транспортного средства, центрального блока обработки (CPU), который выполняет программы, хранящиеся в ROM, и запоминающего устройства с произвольным доступом (RAM), которое служит доступным запоминающим устройством. В качестве замены или в дополнение к CPU микропроцессор (MPU), цифровой сигнальный процессор (DSP), специализированная интегральная схема (ASIC), программируемая пользователем вентильная матрица (FPGA) или подобное также могут использоваться в качестве рабочей схемы.
[0019]
Устройство 19 управления выполняет программы, хранящиеся в ROM, с использованием CPU, чтобы тем самым достигать функции получения информации о движении для получения информации, касающейся состояния движения задействуемого транспортного средства, функции определения обстановки движения для определения обстановки движения задействуемого транспортного средства, функции управления движением для управления движением задействуемого транспортного средства, функции управления автономной сменой полосы движения для автономной определения того, возможна или нет смена полосы движения и управления сменой полосы движения, функции представления информации о смене полосы движения для представления водителю информации о смене полосы движения относительно операции движения задействуемого транспортного средства, выполняемой посредством управления автономной сменой полосы движения, и функции подтверждения принятия для подтверждения того, принимает ли водитель смену полосы движения в ответ на представленную информацию о смене полосы движения. Эти функции устройства 19 управления будут описаны ниже.
[0020]
Функция получения информации о движении устройства 19 управления является функцией получения информации о движении касательно состояния движения задействуемого транспортного средства. Например, устройство 19 управления использует функцию получения информации о движении для получения в качестве информации о движении информации изображения внешнего окружения вокруг транспортного средства, захваченной передней камерой и задней камерой, включенными в состав датчиков 11, и/или результатов обнаружения посредством переднего радара, заднего радара и боковых радаров, включенных в состав датчиков 11. Дополнительно или в качестве альтернативы, устройство 19 управления использует функцию получения информации о движении, чтобы получать в качестве информации о движении информацию о скорости транспортного средства задействуемого транспортного средства, определенную датчиком скорости транспортного средства, включенным в состав датчиков 11, и/или информацию изображения лица водителя, захваченную бортовой камерой, включенной в состав датчиков 11.
[0021]
Дополнительно или в качестве альтернативы, устройство 19 управления использует функцию получения информации о движении, чтобы получать в качестве информации о движении информацию о текущем положении задействуемого транспортного средства от устройства 12 определения положения задействуемого транспортного средства. Дополнительно или в качестве альтернативы, устройство 19 управления использует функцию получения информации о движении, чтобы получать в качестве информации о движении позиционную информацию точек слияния, точек разветвления, пунктов пропуска, местоположений, в которых количество полос уменьшается, зон обслуживания (SA)/зон парковки (PA) и т.д. из базы 13 картографических данных. Кроме того, устройство 19 управления использует функцию получения информации о движении для получения такой информации, как типы дорог, ширина дороги, количество полос движения, радиусы дороги, наличие или отсутствие полос движения для правого и левого поворота, а также количество и ограничение скорости эксклюзивных полос в качестве информации о движении из базы 13 картографических данных. Кроме того, устройство 19 управления использует функцию получения информации о движении, чтобы получать в качестве информации о движении информацию о действии над бортовым оборудованием 14 (например, прерывистое время работы стеклоочистителя), выполняемым водителем, от бортового оборудования 14.
[0022]
Функция определения обстановки движения устройства 19 управления является функцией обращения к таблице, хранящейся в ROM устройства 19 управления, для определения обстановки движения, в которой задействуемое транспортное средство движется. Фиг.2 является схемой, иллюстрирующей пример таблицы. Как показано на Фиг.2, таблица хранит обстановки движения, подходящие для смены полос движения, а также условия определения для каждой обстановки движения. Устройство 19 управления использует функцию определения обстановки движения для обращения к таблице, показанной на Фиг.2, чтобы определить, является ли обстановка движения задействуемого транспортного средства обстановкой движения, подходящей для смены полос движения.
[0023]
Например, в примере, показанном на Фиг.2, условие определения для «обстановки, в которой догоняется впереди идущее транспортное средство» определяется четырьмя условиями: условием, что «впереди идущее транспортное средство находится впереди», условием, что «скорость транспортного средства впереди идущего транспортного средства < установленной скорости транспортного средства у задействуемого транспортного средства», условием «достижения впереди идущего транспортного средства в течение заранее определенного времени» и условием, что «направление смены полосы движения не находится под условием запрета смены полосы движения». Устройство 19 управления использует функцию определения обстановки движения для определения того, удовлетворяет или нет задействуемое транспортное средство указанным выше условиям, например, на основе результатов обнаружения передней камерой и/или передним радаром, включенным в состав датчиков 11, скорости транспортного средства задействуемого транспортного средства, определенной датчиком скорости транспортного средства, включенным в состав датчиков 11, позиционной информации задействуемого транспортного средства, определенной устройством 12 определения положения задействуемого транспортного средства, и т.д. Когда вышеуказанные условия удовлетворены, устройство 19 управления определяет, что задействуемое транспортное средство находится в «обстановке, в которой догоняется впереди идущее транспортное средство». Аналогично, для всех других обстановок движения, занесенных в таблице определения обстановок, показанной на Фиг.2, устройство 19 управления использует функцию определения обстановки движения, чтобы определять, удовлетворяется ли каждое условие определения.
[0024]
Примеры условия запрета смены полосы движения включают в себя условие, что «задействуемое транспортное средство движется в зоне запрета смены полосы движения», условие, что «препятствие существует в направлении смены полосы движения», условие, что «задействуемое транспортное средство пересечет разделительную линия (разделительную линию дороги)», и условие, что «задействуемое транспортное средство заедет на обочину дороги или пересечет ее конец дороги». На дороге, на которой разрешена аварийная остановка на обочине дороги и т.п. в «обстановке экстренной эвакуации», условие, что «задействуемое транспортное средство заедет на обочину дороги или пересечет конец дороги», может быть разрешено в «обстановке экстренной эвакуации». В таблице, показанной на Фиг.2, уровень необходимости смены полосы движения, ограничение по времени и направление смены полосы движения будут описаны ниже.
[0025]
Когда обстановка движения задействуемого транспортного средства соответствует множеству обстановок движения, устройство 19 управления использует функцию определения обстановки движения, чтобы определить обстановку движения, обладающую более высоким уровнем необходимости смены полос движения, в качестве обстановки движения задействуемого транспортного средства. Например, предполагается, что в таблице, показанной на Фиг.2 обстановка движения задействуемого транспортного средства соответствует «обстановке, в которой догоняется впереди идущее транспортное средство» и «обстановке смены полосы движения по направлению к пункту назначения», и уровень необходимости X1 смены полос движения в «обстановке, в которой догоняется впереди идущее транспортное средство» меньше, чем уровень необходимости X8 смены полос движения в «обстановке смены полосы движения по направлению к пункту назначения» (X1 [0026] Функция управления движением устройства 19 управления является функцией управления движением задействуемого транспортного средства. Например, устройство 19 управления использует функцию управления движением для обнаружения разметок полосы движения полосы движения задействуемого транспортного средства, по которой движется задействуемое транспортное средство, на основе результатов обнаружения датчиков 11 и выполнения управления удержанием полосы движения для управления положением движения задействуемого транспортного средства в направлении ширины дороги, так чтобы задействуемое транспортное средство двигалось по полосе движения задействуемого транспортного средства. В этом случае устройство 19 управления использует функцию управления движением, чтобы позволить устройству 18 управления вождением управлять работой исполнительного механизма рулевого управления и тому подобного, чтобы задействуемое транспортное средство двигалось в надлежащем положении движения. Дополнительно или в качестве альтернативы, устройство 19 управления также может использовать функцию управления движением, чтобы осуществлять управление движением- следованием для автономного следования за впереди идущим транспортным средством на некотором расстоянии от этого впереди идущего транспортного средства. При выполнении управления движением-следованием устройство 19 управления использует функцию управления движением для вывода сигналов управления в устройство 18 управления вождением, которое управляет действием приводного механизма, таким как двигатель или тормоза, с тем чтобы задействуемое транспортное средство двигалось на постоянном расстоянии между задействуемым транспортным средством и впереди идущим транспортным средством. В последующем описании автономное управление движением будет описано как включающее в себя управление удержанием полосы движения, управление движением-следованием, управление движением поворота направо или налево и управление автономной сменой полосы движения. [0027] Функция управления автономной сменой полосы движения устройства 19 управления является функцией определения того, осуществлять или нет смену полос движения, на основе обстановки движения задействуемого транспортного средства и/или информации о препятствиях, существующих вокруг задействуемого транспортного средства. Дополнительно или в качестве альтернативы, функция управления автономной сменой полосы движения является функцией, позволяющей устройству 18 управления вождением управлять работой приводного механизма, такого как двигатель, и тормоза, а также работой исполнительного механизма рулевого управления при определении необходимости осуществления смены полос движения. Дополнительно или альтернативно, функция управления автономной сменой полосы движения является функцией установки момента начала управления автономной сменой полосы движения на основе состояния движения задействуемого транспортного средства и состояния водителя и выполнения управления автономной сменой полосы движения в соответствии с установленным момента начала. [0028] Функция управления автономной сменой полосы движения включает в себя функцию, которая последовательно выполняет два или более раз смену полосы движения в одном и том же направлении смены полосы движения с полосы движения задействуемого транспортного средства, и функцию, которая управляет поперечной скоростью транспортного средства при последовательном выполнении двух или более смен полосы движения. При последовательном выполнении двух или более смен полос движения в одном и том же направлении смены полосы движения, происходящее вокруг проверяется датчиками 11 и т.п. до начала каждой смены полосы движения. Однако окружающая обстановка может со временем измениться, пока не начнется вторая и последующие смены полосы движения. В настоящем варианте осуществления поперечная скорость управляется таким образом, чтобы поперечная скорость управления вторым и последующими автономными сменами полосы движения была меньше поперечной скорости управления первой автономной сменой полосы движения, чтобы иметь возможность последовательно выполнять два или более раз смены полосы движения в том же направлении смены полосы движения даже при изменении окружающей обстановки. Поперечная скорость транспортного средства - это скорость движения относительно оси, перпендикулярной оси вдоль направления движения транспортного средства. Другими словами, когда транспортное средство движется по полосе движения, скорость движения в направлении ширины полосы движения является поперечной скоростью транспортного средства. [0029] Далее будет описано управление поперечной скоростью согласно первому варианту осуществления настоящего изобретения. Фиг.3A является схемой, иллюстрирующей управление поперечной скоростью при выполнении последовательных смен полосы движения согласно варианту осуществления настоящего изобретения. На Фиг.3A показан вид сверху, иллюстрирующий обстановку движения, когда задействуемое транспортное средство V0 меняет полосы движения, и график, иллюстрирующий поперечное положение и поперечную скорость задействуемого транспортного средства V0 при смене полосы движения. Вид сверху на Фиг.3A является видом сверху, иллюстрирующим пример управления автономной сменой полосы движения, при котором смена полосы движения выполняется последовательно с полосы L1 на следующую соседнюю полосу L3 через соседнюю полосу L2, в то время как задействуемое транспортное средство V0 движется из-за наличия точки ответвления дороги впереди на дороге с левосторонним движением, имеющей три полосы движения L1, L2, L3 с одной стороны. Хотя изображение опущено, в то время как задействуемое транспортное средство V0 движется по крайней правой полосе L3, выезд эксклюзивного пути транспортного средства существует на передней левой стороне. Когда направление движения изменяется на выезд, смена полосы движения должна выполняться последовательно с текущей полосы L3 на крайнюю левую полосу L1 через полосу L2, и в таком случае выполняется такое же управление. [0030] Устройство 19 управления ускоряет поперечную скорость Vh (м/с) задействуемого транспортного средства V0 до предварительно определенной первой поперечной скорости Vh1 в полосе L1 задействуемого транспортного средства посредством функции управления автономной сменой полосы движения, как показано на графике на Фиг.3А. Затем устройство 19 управления выполняет смену полосы движения с полосы L1 задействуемого транспортного средства на соседнюю полосу движения L2, поддерживая первую поперечную скорость Vh1. Устройство 19 управления затем снижает поперечную скорость Vh задействуемого транспортного средства V0 до предварительно определенной второй поперечной скорости Vh2 в соседней полосе L2 посредством функции управления автономной сменой полосы движения. Затем устройство 19 управления выполняет смену полосы движения с соседней полосы L2 на следующую смежную полосу L3, поддерживая вторую поперечную скорость Vh2. Соотношение между первой поперечной скоростью Vh1 и второй поперечной скоростью Vh2 составляет Vh1>Vh2. [0031] Отметим, что поперечная скорость, когда задействуемое транспортное средство V0 меняет полосы движения, является поперечной скоростью, когда задействуемое транспортное средство V0 пересекает разметку CL полосы движения, предусмотренную между полосами движения (в дальнейшем также называемую подходящей разметкой полосы движения). Кроме того, когда задействуемое транспортное средство V0 пересекает подходящую разметку CL полосы движения, то это означает, например, период от момента, когда правое переднее колесо задействуемого транспортного средства V0 нажимает на подходящую разметку CL полосы движения, до момента, когда заднее левое колесо выходит за пределы подходящей разметки CL полосы движения, когда смена полосы движения выполняется с полосы L1 с левой стороны на полосу L2 с правой стороны, как показано на (A) и (B) на Фиг.4. [0032] В соответствии с управлением поперечной скоростью посредством функции управления автономной сменой полосы движения настоящего варианта осуществления, вторая поперечная скорость Vh2, когда задействуемое транспортное средство V0 выполняет управление второй сменой полосы движения между соседней полосой L2 и следующей смежной полосой L3, устанавливается меньше, чем первая поперечная скорость Vh1, когда задействуемое транспортное средство V0 выполняет управление первой автономной сменой полосы движения между полосой движения L1 задействуемого транспортного средства и соседней полосой движения L2. В результате управление второй автономной сменой полосы движения выполняется на более низкой скорости, чем управление первой автономной сменой полосы движения. Следовательно, происходящее вокруг может быть подходящим образом проверено, поскольку время, используемое для проверки происходящего вокруг с помощью датчиков 11 и т.п., становится больше до начала управления вторым и последующими автономными сменами полосы движения. Кроме того, посредством выполнения управления второй автономной сменой полосы движения на скорости меньше, чем скорость управления первой автономной сменой полосы движения, увеличивается время, которое следующее транспортное средство использует для подтверждения смены полосы движения задействуемого транспортного средства V0. Это позволяет водителю следующего транспортного средства легко распознавать смену полосы движения задействуемого транспортного средства V0. Соответственно, безопасность управления автономной сменой полосы движения дополнительно повышается. [0033] Следует отметить, что устройство 19 управления выполняет то же самое управление поперечной скоростью посредством функции управления автономной сменой полосы движения при выполнении двух или более раз последовательного управления автономной сменой полосы движения на дороге, имеющей три или более полос движения с одной стороны. Например, при трехкратном последовательном автономном управлении сменой полосы движения на дороге с левосторонним движением, имеющей четыре полосы движения с одной стороны, таким же образом, как описано выше, поперечная скорость управления первой автономной сменой полосы движения устанавливается равной первой поперечной скорости Vh1, а поперечная скорость управления второй и третьей автономными сменами полосы движения устанавливается во вторую поперечную скорость Vh2, которая меньше первой поперечной скорости Vh1. То есть, когда смена полосы движения после первой смены полосы движения называется (n+1)-ой сменой полосы движения (n - натуральное число), поперечная скорость управления (n+1)-ой автономной сменой полосы движения и поперечная скорость управления (n+2)-ой автономной сменой полосы движения устанавливаются в одно и то же значение. В результате даже при второй и последующих сменах полосы движения происходящее вокруг может быть надлежащим образом проверено и подтверждено, и смена полосы движения задействуемого транспортного средства V0 может быть четко распознана следующим транспортным средством. [0034] Кроме того, в отличие от вышеизложенного, поперечная скорость управления (n+2)-ой автономной сменой полосы движения может быть установлена меньше, чем поперечная скорость управления (n+1)-ой автономной сменой полосы движения. В частности, как показано на Фиг.3B, при трехкратном последовательном автономном управлении сменой полосы движения с крайней левой полосы L1 на крайнюю правую полосу L4 на дороге с левосторонним движением, имеющей четыре полосы L1-L4 с одной стороны, поперечная скорость управления первой автономной сменой полосы движения с полосы L1 на полосу L2 устанавливается в первую поперечную скорость Vh1. Затем поперечная скорость управления второй автономной сменой полосы движения с полосы L2 на полосу L3 устанавливается во вторую поперечную скорость Vh2, которая меньше первой поперечной скорости Vh1. Поперечная скорость управления третьей автономной сменой полосы движения с полосы L3 на полосу движения L4 устанавливается равной третьей поперечной скорости Vh3, которая меньше второй поперечной скорости Vh2. Соответственно, поскольку поперечная скорость управления автономной сменой полосы движения становится медленнее по мере увеличения количества смен полосы движения, происходящее вокруг может быть надлежащим образом проверено и подтверждено даже при второй и последующих сменах полосы движения, и смена полосы движения задействуемого транспортного средства V0 может быть четко распознана следующим транспортным средством. [0035] При управлении поперечной скоростью, показанном на Фиг.3A, поперечная скорость Vh задействуемого транспортного средства V0 замедляется с первой поперечной скорости Vh1 до второй поперечной скорости Vh2 в полосе L2. Однако, как показано на Фиг.3C, управление удержанием полосы движения может выполняться с первой поперечной скоростью Vh1, временно становящейся нулевой в полосе L2, а управление второй автономной сменой полосы движения может выполняться с увеличением поперечной скорости до второй поперечной скорости Vh2 в полосе L2. Даже когда поперечная скорость управляется таким образом, происходящее вокруг может быть надлежащим образом проверено и подтверждено вторым и последующими сменами полосы движения, и смена полосы движения задействуемого транспортного средства V0 может четко распознаваться следующим транспортным средством. [0036] При управлении поперечной скоростью согласно первому варианту осуществления, описанному выше, предварительно определенная вторая поперечная скорость Vh2, предварительно определенная третья поперечная скорость Vh3 и т.п. используются для поперечной скорости управления второй и последующими автономными сменами полосы движения. Однако поперечная скорость управления второй и последующими автономными сменами полосы движения может быть установлена согласно информации о движении. Далее будут описаны со второго по пятый варианты осуществления для установки второй и последующих поперечных скоростей на основе информации о движении, полученной функцией получения информации о движении устройства 19 управления. [0037] Фиг.3D и Фиг.3E показано управление поперечной скоростью согласно второму варианту осуществления настоящего изобретения. В этом варианте осуществления устройство 19 управления устанавливает поперечную скорость управления второй и последующими автономными сменами полосы движения согласно направлению смены полосы движения посредством функции управления автономной сменой полосы движения. Другими словами, при выполнении смены полосы движения с полосы с низкой средней скоростью движения на полосу с высокой средней скоростью движения, относительная скорость следующего транспортного средства по отношению к задействуемому транспортному средству V0 становится больше, и расстояние между транспортными средствами между задействуемым транспортным средством V0 и следующим транспортным средством становится короче. Таким образом, время подтверждения происходящего вокруг для второй и последующих смен полосы движения сокращается для задействуемого транспортного средства V0. Для решения этой проблемы в настоящем варианте осуществления устанавливается поперечная скорость таким образом, чтобы управление второй и последующими автономными сменами полосы движения выполнялось на более низкой скорости при смене полосы движения с полосы движения, средняя скорость движения которой меньше, на полосу движения, средняя скорость движения которой больше. [0038] Устройство 19 управления определяет, превышает ли средняя скорость движения полосы движения задействуемого транспортного средства, по которой движется задействуемое транспортное средство V0, среднюю скорость движения полосы движения, на которую данное транспортное средство меняет полосы движения, на основе полученной информации о движении с помощью функции управления автономной сменой полосы движения. Средняя скорость движения полосы движения задействуемого транспортного средства может быть скоростью движения задействуемого транспортного средства V0. В качестве альтернативы, средняя скорость движения полосы движения задействуемого транспортного средства может быть определена на основе информации изображения снаружи транспортного средства, захваченной задней камерой задействуемого транспортного средства V0, или результата обнаружения заднего радара. Средняя скорость движения полосы движения, на которую задействуемое транспортное средство меняет полосы движения, может быть определена на основе информации изображения внешнего окружения изображения транспортного средства, захваченного задней камерой задействуемого транспортного средства V0, или результата обнаружения заднего радара. [0039] Кроме того, в качестве информации о движении информация о положении полосы движения задействуемого транспортного средства и информация о положении полосы движения полосы движения, на которую задействуемое транспортное средство меняет полосы движения, могут быть получены из картографической информации, чтобы определить, больше или нет средняя скорость движения полосы движения задействуемого транспортного средства средней скорости движения полосы движения, на которую данное транспортное средство меняет полосы движения, на основе информации о полученном положении полосы движения. Например, на дороге с двумя или более полосами движения с одной стороны средняя скорость движения может отличаться в зависимости от положения полосы движения. Что касается дорог в Японии, средняя скорость движения по крайней правой полосе движения выше, чем по крайней левой полосе движения. Следовательно, обращаясь к информации о положении полосы движения, можно определить, больше или нет средняя скорость движения полосы движения задействуемого транспортного средства средней скорости движения полосы движения, на которую задействуемое транспортное средство меняет полосы движения. Поскольку положение полосы движения для полосы движения и полосы для обгона различается в зависимости от страны или региона, правостороннего или левостороннего движения, правил дорожного движения и т.п., желательно определять в соответствии с дорогой, по которой двигается транспортное средство. [0040] Затем, когда средняя скорость движения полосы движения, на которую задействуемое транспортное средство меняет полосы движения, превышает среднюю скорость движения полосы движения задействуемого транспортного средства, устройство 19 управления устанавливает поперечную скорость посредством функции управления автономной сменой полосы движения, которая должна быть установлена для управления второй и последующими автономными сменами полосы движения, меньшей, чем поперечная скорость, когда средняя скорость движения полосы движения, на которую задействуемое транспортное средство меняет полосы движения, меньше средней скорости движения полосы движения задействуемого транспортного средства. То есть устройство 19 управления выполняет управление второй и последующими автономными сменами полосы движения на более низкой скорости посредством функции управления автономной сменой полосы движения при выполнении смены полосы движения с полосы движения, средняя скорость движения которой низкая, на полосу движения, средняя скорость которой скорость передвижения высокая. [0041] Обстановка движения, показанная на виде сверху на Фиг.3D иллюстрирует управление двумя последовательными автономными сменами полосы движения с полосы для обгона L3 на правом конце на полосу движения L1 на левом конце. Например, когда средняя скорость движения полос L1, L2, L3, определенная из информации о движении, составляет 80 км/ч, 90 км/ч и 100 км/ч соответственно, средняя скорость движения полосы L3 задействуемого транспортного средства, по которой движется задействуемое транспортное средство V0, определяется как более быстрая, чем средняя скорость движения полосы L1, на которую задействуемое транспортное средство меняет полосы движения. Отметим, что результат определения становится одинаковым, даже когда он определяется на основе положения полосы движения полосы L1 и полосы L3. Такая обстановка движения попадает в смену полосы движения с полосы движения с высокой средней скоростью движения на полосу движения с низкой средней скоростью движения. Следовательно, относительная скорость следующего транспортного средства по отношению к задействуемому транспортному средству V0 не увеличивается при смене полосы движения. Устройство 19 управления устанавливает предварительно определенную первую поперечную скорость Vh1 для выполнения управления первой автономной сменой полосы движения и устанавливает предварительно определенную вторую поперечную скорость Vh2 для выполнения управления второй автономной сменой полосы движения посредством функции управления автономной сменой полосы движения, как показано на графике на Фиг.3D. [0042] С другой стороны, обстановка движения, показанная на виде сверху на Фиг.3E иллюстрирует управление двумя последовательными автономными сменами полосы движения с полосы движения L1 для движения на левом конце на полосу L3 для обгона на правом конце. Например, когда средняя скорость движения полос L1, L2, L3, определенная из информации о движении, составляет соответственно 80 км/ч, 90 км/ч и 100 км/ч таким же образом, как на Фиг.3D, средняя скорость движения полосы L1 задействуемого транспортного средства, по которой движется задействуемое транспортное средство V0, определяется как меньшая, чем средняя скорость движения полосы движения L3, на которую транспортное средство меняет полосы движения. Следует отметить, что результат определения становится одинаковым, даже когда он определяется на основе положения полосы движения полосы L1 движения и полосы L3 движения. Такая обстановка движения попадает в смену полосы движения с полосы движения, средняя скорость движения которой низкая, на полосу движения, средняя скорость движения которой высокая. По этой причине устройство 19 управления устанавливает предварительно определенную первую поперечную скорость Vh1 для выполнения управления первой автономной сменой полосы движения и устанавливает четвертую поперечную скорость Vh4, которая меньше второй поперечной скорости Vh2, для выполнения управления второй автономной сменой полосы движения посредством функции управления автономной сменой полосы движения, как показано на графике Фиг.3E. [0043] Отметим, что соотношение между первой поперечной скоростью Vh1, второй поперечной скоростью Vh2 и четвертой поперечной скоростью Vh4 составляет Vh1>Vh2>Vh4. Кроме того, четвертая поперечная скорость Vh4 вычисляется с использованием следующего уравнения (a) с помощью функции управления автономной сменой полосы движения устройства 19 управления. C1 в следующем уравнении (a) - это коэффициент, используемый для расчета четвертой поперечной скорости Vh4. Для этого коэффициента используются числовые значения, равные или меньшие 1. Кроме того, коэффициент C1 может быть меньше, поскольку разница скоростей между полосой движения задействуемого транспортного средства и полосой движения, на которую задействуемое транспортное средство меняет полосы движения, становится большой. Vh4=Vh2×C1 ··· (а) [0044] Таким образом, при второй и последующих сменах полосы движения при движении с полосы движения, средняя скорость движения которой низкая, на полосу движения, средняя скорость движения которой высокая, поперечная скорость управления второй и последующими автономными сменами полосы движения устанавливается медленнее. Это позволяет выполнять управление второй и последующими автономными сменами полосы движения на более низкой скорости, а время, используемое для проверки и подтверждения происходящего вокруг с помощью датчиков 11 и т.п. до начала управления второй и последующими автономными сменами полосы движения, увеличивается. Следовательно, можно правильно подтвердить происходящее вокруг. Кроме того, поскольку время, которое должно использоваться для подтверждения смены полосы движения задействуемого транспортного средства V0, увеличивается, следующее транспортное средство может легко распознать смену полосы движения. Соответственно, безопасность управления автономной сменой полосы движения еще больше повышается. Кроме того, чем больше разница в скорости между полосой движения задействуемого транспортного средства и полосой движения, на которую задействуемое транспортное средство меняет полосы движения, тем меньше становится коэффициент C1. Это позволяет выполнять вторую и последующую автономную смену полосы движения на более низкой скорости, поскольку разница скоростей становится небольшой. В результате, происходящее вокруг подтверждаются должным образом, и следующее транспортное средство может четко распознавать смену полосы движения задействуемого транспортного средства V0. [0045] Фиг.3F иллюстрирует управление поперечной скоростью согласно третьему варианту осуществления настоящего изобретения. В этом варианте осуществления устройство 19 управления устанавливает поперечную скорость управления второй и последующими автономными сменами полосы движения согласно уровню K загруженности дорожного движения посредством функции управления автономной сменой полосы движения. То есть, когда уровень K загруженности дорожного движения около задействуемого транспортного средства V0 выше, расстояние между задействуемым транспортным средством V0 и другим транспортным средством около задействуемого транспортного средства V0 становится небольшим. Таким образом, время, которое задействуемое транспортное средство V0 может использовать для подтверждения происходящего вокруг для второй и последующих смен полосы движения, сокращается. Чтобы решить эту проблему, настоящий вариант осуществления устанавливает поперечную скорость так, чтобы управление второй и последующими автономными сменами полосы движения выполнялось на более низкой скорости, когда уровень K загруженности дорожного движения является высоким. [0046] Устройство 19 управления определяет уровень K загруженности дорожного движения на основе информации о движении, полученной посредством функции управления автономной сменой полосы движения. Уровень K загруженности дорожного движения получается на основе, например, расстояния между транспортными средствами между задействуемым транспортным средством V0 и впереди идущим транспортным средством V2, расстояния между транспортными средствами между задействуемым транспортным средством V0 и следующим транспортным средством V3, количества транспортных средств вокруг, уровня загруженности, включенного в информацию VICS (зарегистрированный товарный знак), степени отклонения между допустимой скоростью и фактической скоростью задействуемого транспортного средства V0, и т.п. Уровень K загруженности дорожного движения определяется как более высокий, поскольку расстояние между транспортными средствами между задействуемым транспортным средством V0 и впереди идущим транспортным средством V2 меньше, расстояние между транспортными средствами между задействуемым транспортным средством V0 и следующим транспортным средством V3 меньше, количество окружающих транспортных средств больше, уровень загруженности, включенный в информацию VICS, выше или степень отклонения между допустимой скоростью и фактической скоростью транспортного средства задействуемого транспортного средства больше. [0047] Когда уровень K загруженности дорожного движения меньше, чем K-го предварительно определенного значения, устройство 19 управления устанавливает предварительно определенную первую поперечную скорость Vh1 для выполнения управления первой автономной сменой полосы движения и устанавливает вторую поперечную скорость Vh2 для выполнения управления второй автономной сменой полосы движения с помощью функции управления автономной сменой полосы движения, как показано на графике Фиг.3F. Когда уровень K загруженности дорожного движения выше, чем K-ого предварительно определенного значения, устройство 19 управления устанавливает предварительно определенную первую поперечную скорость Vh1 для выполнения управления первой автономной сменой полосы движения и устанавливает пятую поперечную скорость Vh5 меньше, чем вторая поперечная скорость Vh2, чтобы выполнить управление второй автономной сменой полосы движения посредством функции управления автономной сменой полосы движения. [0048] Отметим, что соотношение первой поперечной скорости Vh1, второй поперечной скорости Vh2 и пятой поперечной скорости Vh5 составляет Vh1>Vh2>Vh5. Кроме того, пятая поперечная скорость Vh5 вычисляется с использованием следующего уравнения (b) с помощью функции управления автономной сменой полосы движения устройства 19 управления. C2 в следующем уравнении (b) - это коэффициент, используемый для расчета пятой поперечной скорости Vh5. Для коэффициента используются числовые значения, равные или меньшие 1. Коэффициент C2 может быть меньше, поскольку уровень K загруженности дорожного движения выше. Vh5=Vh2 × C2 ··· (b) [0049] При выполнении управления двумя или более последовательными автономными сменами полосы движения в ситуации, когда уровень K загруженности дорожного движения является высоким, поперечная скорость управления второй и последующими автономными сменами полосы движения устанавливается меньшей. В результате управление второй и последующими автономными сменами полосы движения выполняются на более низкой скорости, а время, используемое для подтверждения происходящего вокруг до начала второй и последующих смен полосы движения, увеличивается. Следовательно, можно правильно подтвердить происходящее вокруг. Кроме того, поскольку время, которое должно использоваться для подтверждения смены полосы движения задействуемого транспортного средства V0, увеличивается, следующее транспортное средство может легко распознать смену полосы движения. Соответственно, безопасность управления автономной сменой полосы движения еще больше повышается. Кроме того, посредством установки коэффициента C2 меньшим, когда уровень K загруженности трафика выше, управление второй и последующими автономными сменами полосы движения выполняется на более низкой скорости, поскольку уровень K загруженности дорожного движения выше. В результате, происходящее вокруг подтверждаются должным образом, и следующее транспортное средство может четко распознавать смену полосы движения задействуемого транспортного средства V0. [0050] Фиг.3G иллюстрирует управление поперечной скоростью согласно четвертому варианту осуществления настоящего изобретения. В этом варианте осуществления устройство 19 управления устанавливает поперечную скорость управления второй и последующими автономными сменами полосы движения согласно радиусу Lr траектории, по которой движется задействуемое транспортное средство V0, посредством функции управления автономной сменой полосы движения. То есть, когда радиус Lr траектории мал, водитель не может видеть далеко вперед, и поэтому для задействуемого транспортного средства V0 становится трудно проверять и подтверждать происходящее вокруг с помощью датчиков 11 и т.п. для второй смены полосы движения. Для решения этой проблемы в настоящем варианте осуществления устанавливается поперечная скорость таким образом, чтобы управление второй и последующими автономными сменами полосы движения выполнялось на более низкой скорости, когда радиус Lr траектории мал. [0051] Устройство 19 управления определяет радиус Lr траектории на основе картографической информации, которая представляет собой информацию о движении, с использованием функции управления автономной сменой полосы движения. Следует отметить, что полоса движения, для которой определяется радиус Lr, может быть полосой движения задействуемого транспортного средства или может быть полосой движения, на которую задействуемое транспортное средство меняет полосы движения. Когда радиус Lr траектории больше Lr-го предварительно определенного значения, устройство 19 управления устанавливает предварительно определенную первую поперечную скорость Vh1 для выполнения управления первой автономной сменой полосы движения и устанавливает вторую поперечную скорость Vh2 для выполнения управления второй автономной сменой полосы движения посредством функции управления автономной сменой полосы движения, как показано на графике Фиг.3G. Когда радиус Lr траектории меньше Lr-ого предварительно определенного значения, устройство 19 управления устанавливает предварительно определенную первую поперечную скорость Vh1 для выполнения управления первой автономной сменой полосы движения и устанавливает шестую поперечную скорость Vh6 меньшей, чем вторая поперечная скорость Vh2, для выполнения управление второй автономной сменой полосы движения с помощью функции управления автономной сменой полосы движения. [0052] Отметим, что соотношение первой поперечной скорости Vh1, второй поперечной скорости Vh2 и шестой поперечной скорости Vh6 составляет Vh1>Vh2>Vh6. Кроме того, шестая поперечная скорость Vh6 вычисляется с использованием следующего уравнения (c) с помощью функции управления автономной сменой полосы движения устройства 19 управления. C3 в следующем уравнении (c) - это коэффициент, используемый для расчета шестой поперечной скорости Vh6. Для коэффициента используются числовые значения, равные или меньшие 1. Кроме того, чем меньше радиус Lr траектории, тем меньше может быть коэффициент C3. Vh6=Vh2 × C3 ··· (c) [0053] Таким образом, при выполнении двух или более последовательных смен полосы движения в ситуации дорожного движения, в которой радиус Lr траектории меньше, поперечная скорость управления второй и последующими автономными сменами полосы движения устанавливается меньшей. В результате управление второй и последующими автономными сменами полосы движения выполняются на более низкой скорости, а время, используемое для проверки и подтверждения происходящего вокруг до начала второй смены полосы движения, увеличивается. Следовательно, можно правильно подтвердить происходящее вокруг. Кроме того, поскольку время, которое должно использоваться для подтверждения смены полосы движения задействуемого транспортного средства V0, увеличивается, следующее транспортное средство может легко распознать смену полосы движения. Соответственно, безопасность управления автономной сменой полосы движения еще больше повышается. Кроме того, чем меньше радиус Lr траектории, тем меньше устанавливается коэффициент C3. В результате, поскольку радиус Lr траектории меньше, управление второй и последующими автономными сменами полосы движения выполняются на более низкой скорости. В результате, происходящее вокруг подтверждаются должным образом, и следующее транспортное средство может четко распознавать смену полосы движения задействуемого транспортного средства V0. [0054] Фиг.3H является графиком, иллюстрирующим управление поперечной скоростью согласно пятому варианту осуществления настоящего изобретения. В этом варианте осуществления устройство 19 управления устанавливает поперечную скорость управления второй и последующими автономными сменами полосы движения в соответствии с осадками Rf посредством функции управления автономной сменой полосы движения. То есть, когда количество осадков Rf велико, происходящее вокруг трудно подтвердить для выполнения второй смены полосы движения с помощью датчиков 11 и т.п. задействуемого транспортного средства V0. Чтобы решить эту проблему, настоящий вариант осуществления устанавливает поперечную скорость так, чтобы управление второй и последующими автономными сменами полосы движения выполнялось на более низкой скорости, когда количество осадков Rf велико. [0055] Устройство 19 управления определяет количество осадков Rf по времени прерывания работы стеклоочистителя, которое представляет собой информацию о движении, с использованием функции управления автономной сменой полосы движения. Когда задействуемое транспортное средство V0 оснащено датчиком дождевых капель, информация о движении «дождь» может быть получена из результата обнаружения датчика дождевых капель, или результат обнаружения датчика дождевых капель и время прерывания работы стеклоочистителя могут быть объединены для определения «дождя». Когда количество осадков Rf больше Rf-ого предварительно определенного значения, устройство 19 управления устанавливает предварительно определенную первую поперечную скорость Vh1 для выполнения управления первой автономной сменой полосы движения и устанавливает вторую поперечную скорость Vh2 для выполнения управления второй автономной сменой полосы движения с помощью функции управления автономной сменой полосы движения, как показано на графике Фиг.3Н. Когда количество осадков Rf меньше Rf-ого предварительно определенного значения, устройство 19 управления устанавливает предварительно определенную первую поперечную скорость Vh1 для выполнения управления первой автономной сменой полосы движения и устанавливает седьмую поперечную скорость Vh7 меньшей, чем вторая поперечная скорость Vh2, для выполнения управления второй автономной сменой полосы движения посредством функции управления автономной сменой полосы движения. [0056] Отметим, что соотношение первой поперечной скорости Vh1, второй поперечной скорости Vh2 и седьмой поперечной скорости Vh7 составляет Vh1>Vh2>Vh7. Кроме того, седьмая поперечная скорость Vh7 вычисляется с использованием следующего уравнения (d) с помощью функции управления автономной сменой полосы движения устройства 19 управления. C4 в следующем уравнении (d) - это коэффициент, используемый для расчета седьмой поперечной скорости Vh7. Для коэффициента используются числовые значения, равные или меньшие 1. Кроме того, чем больше количество осадков Rf, тем меньше может быть установлен коэффициент C4. Vh7=Vh2 × C4 ··· (d) [0057] Таким образом, при выполнении двух или более последовательных смен полосы движения в ситуации дорожного движения, в которой количество осадков Rf больше, поперечная скорость управления второй и последующими автономными сменами полосы движения устанавливается меньшей. В результате управление второй и последующими автономными сменами полосы движения выполняется на более низкой скорости, а время, используемое для подтверждения происходящего вокруг до начала второй смены полосы движения, увеличивается. Следовательно, можно правильно подтвердить происходящее вокруг. Кроме того, поскольку время, которое должно использоваться для подтверждения смены полосы движения задействуемого транспортного средства V0, увеличивается, следующее транспортное средство может легко распознать смену полосы движения. Соответственно, безопасность управления автономной сменой полосы движения еще больше повышается. Кроме того, устанавливая коэффициент C4 меньшим по мере увеличения количества осадков Rf, управление второй и последующими автономными сменами полосы движения выполняется на более низкой скорости, когда количество осадков Rf увеличивается. В результате, происходящее вокруг подтверждаются должным образом, и следующее транспортное средство может четко распознавать смену полосы движения задействуемого транспортного средства V0. [0058] Следует отметить, что варианты осуществления со второго по пятый могут использоваться отдельно или совместно соответственно. Когда варианты осуществления со второго по пятый объединяются для использования, например, как показано в уравнении (e) ниже, поперечная скорость управления второй и последующими автономными сменами полосы движения может быть определена посредством умножения второй поперечной скорости Vh2 на коэффициенты с C1 по C4. Обратите внимание, что, когда состояние движения задействуемого транспортного средства V0 попадает в более чем одно из условий, предусмотренных в информации о движении со второго по пятый вариантов осуществления, поперечная скорость управления второй и последующими автономными сменами полосы движения, определяемая из второй поперечной скорости Vh2, становится очень малой, а смена полосы движения занимает слишком много времени. Следовательно, нижнее предельное значение для поперечной скорости управления второй и последующими автономными сменами полосы движения может быть установлено заранее, и когда расчетная поперечная скорость меньше, чем нижнее предельное значение, нижнее предельное значение может быть установлено как поперечная скорость управления второй и последующими автономными сменами полосы движения. [0059] Кроме того, при управлении поперечной скоростью согласно вариантам осуществления со второго по пятый, когда управление автономной сменой полосы движения выполняется два или более раз подряд на дороге, имеющей три или более полосы движения с одной стороны, таким же образом, как и в управлении поперечной скоростью согласно первому варианту осуществления, поперечная скорость управления (n+1)-ой автономной сменой полосы движения и поперечная скорость управления (n+2)-ой сменой полосы движения могут быть одинаковыми, или поперечная скорость управления (n+2)-ой автономной сменой полосы движения может быть установлена меньшей, чем поперечная скорость управления (n+1)-ой автономной сменой полосы движения. При установке поперечной скорости управления (n+2)-ой автономной сменой полосы движения меньше, чем поперечная скорость управления (n+1)-ой автономной сменой полосы движения, предпочтительно определять поперечную скорость управления следующей автономной сменой полосы движения посредством умножения поперечной скорости управления автономной сменой полосы движения, выполняемого непосредственно перед этим, на коэффициент. Например, со ссылкой на второй вариант осуществления, показанный на Фиг.3E, поперечная скорость для управления третьей автономной сменой полосы движения определяется посредством умножения четвертой поперечной скорости, определенной для управления второй автономной сменой полосы движения, на коэффициент C1. [0060] Кроме того, при управлении поперечной скоростью согласно вариантам осуществления со второго по пятый таким же образом, как и при управлении поперечной скорости согласно первому варианту осуществления, управление удержанием полосы движения может выполняться посредством установки первой поперечной скорости Vh1, временно нулевой в полосе L2 движения, и управление второй автономной сменой полосы движения может выполняться с ускорением до второй поперечной скорости Vh2 в полосе L2 движения, как показано на Фиг.3С. [0061] Далее будет описана функция представления информации об изменении полосы движения устройства 19 управления. Функция представления информации о смене полосы движения устройства 19 управления является функцией предоставления водителю через устройство 15 представления информации о смене полосы движения, касающейся действия движения задействуемого транспортного средства, выполняемого посредством управления сменой полосы движения. Например, когда во время выполнения управления удержанием полосы движения впереди существует точка разветвления дороги или съезд со скоростной автомагистрали, может потребоваться смена полос движения посредством изменения направления движения задействуемого транспортного средства. Дополнительно или в качестве альтернативы, когда впереди идущее транспортное средство меняет полосы движения во время выполнения управления следованием за впереди идущим транспортным средством, задействуемое транспортное средство также может соответственно менять полосы движения. При выполнении такого управления автономной сменой полосы движения устройство 19 управления использует функцию представления информации о смене полосы движения, чтобы предоставить водителю информацию о смене полосы движения, чтобы побудить водителя самостоятельно подтвердить безопасность. Момент представления информации о смене полосы движения может быть, по меньшей мере, до начала управления автономной сменой полосы движения, поскольку представление информации о смене полосы движения предназначено для цели подтверждения безопасности самим водителем, но информация о смене полосы движения также может представляться во время выполнения управления автономной сменой полосы движения и/или во время завершения управления автономной сменой полосы движения. [0062] Когда устройство 15 представления включает в себя дисплей, формой представления на устройстве 15 представления, использующем функцию представления информации о смене полосы движения, может быть форма отображения визуального образа, включающего в себя изображение, язык и т.д. Дополнительно или в качестве альтернативы, когда устройство 15 представления включает в себя громкоговоритель, может выполняться управление автономной сменой полосы движения, чтобы предоставить водителю информацию о смене полосы движения, включая направление движения задействуемого транспортного средства в направлении ширины дороги (например, информацию руководства, указывающую автономную смена полосы движения вправо или влево) в виде звуковой информации (голоса или звука). Дополнительно или в качестве альтернативы, когда устройство 15 представления включает в себя одну или более сигнальных лампочек, установленных на приборной панели или тому подобном, конкретная сигнальная лампочка может загораться в конкретной форме представления, тем самым осуществляя управление автономной сменой полосы движения, чтобы представлять водителю информацию о смене полосы движения, включающую в себя направление движения задействуемого транспортного средства в направлении ширины дороги. Дополнительно или в качестве альтернативы, когда устройство 15 представления включает в себя устройство сидения с множеством встроенных вибрирующих элементов, конкретный вибрирующий элемент может вибрировать в конкретной форме представления, тем самым осуществляя управление автономной сменой полосы движения, чтобы представлять водителю информацию о смене полосы движения, включающую в себя направление движения задействуемого транспортного средства в направлении ширины дороги. [0063] Таким образом, вместо или в дополнение к отображению информации о смене полосы движения на дисплее в виде визуальной информации, представление водителю информации о смене полосы движения в виде аудиоинформации, такой как голос и звук, в виде визуальной информации через индикацию сигнальной лампочкой или в виде тактильной информации посредством вибрации позволяет водителю более интуитивно воспринимать информацию о смене полосы движения. [0064] Функция подтверждения принятия устройства 19 управления является функцией подтверждения того, принимает ли водитель управление автономной сменой полосы движения в ответ на информацию о смене полосы движения, представленную с использованием функции представления информации о смене полосы движения. Устройство 19 управления принимает операции ввода в устройство 16 ввода от водителя с использованием функции подтверждения приема, например, действие дискового переключателя, действие сенсорного экрана, расположенного на экране дисплея, ввод звука в микрофон, действие указателя поворота и т.п. после того, как информация о смене полосы движения представлена функцией представления информации о смене полосы движения. Устройство 19 управления определяет, принимает ли водитель управление автономной сменой полосы движения, на основе этих операций ввода, используя функцию подтверждения принятия. [0065] Процесс управления автономной сменой полосы движения согласно одному или более вариантам осуществления настоящего изобретения теперь будет описан со ссылкой на Фиг.5A-5E. Фиг.5A-5E являются блок-схемами последовательности операций, иллюстрирующими процесс управления автономной сменой полосы движения согласно одному или более вариантам осуществления настоящего изобретения. Описанный ниже процесс управления автономной сменой полосы движения выполняется устройством 19 управления через заранее определенные интервалы времени. Описание будет приведено ниже с предположением, что становится необходимым сменить полосы движения на следующую соседнюю полосу движения (полосу движения дальше за соседней полосой движения) для предварительно введенного пункта назначения, в то время как устройство 19 управления использует функцию управления движением для выполнения управления удержанием полосы движения для управления положением движения задействуемого транспортного средства в направлении ширины дороги, так чтобы задействуемое транспортное средство двигалось по полосе движения задействуемого транспортного средства. Далее, управление поперечной скоростью, выполняемое при автономной смене полосы движения, будет описано в отношении случая, в котором поперечная скорость управления второй и последующими автономными сменами полосы движения устанавливается согласно уровню загруженности дорожного движения третьего варианта осуществления. [0066] Сначала на этапе S1 Фиг.5A, устройство 19 управления использует функцию получения информации о движении, чтобы получить информацию о движении, касающуюся состояния движения задействуемого транспортного средства. За этапом S1 следует этап S2, на котором устройство 19 управления использует функцию определения обстановки движения для определения обстановки движения задействуемого транспортного средства на основе информации о движении, полученной на этапе S1. [0067] На этапе S3 устройство 19 управления использует функцию определения обстановки движения для определения, является ли обстановка движения задействуемого транспортного средства, определенная на этапе S2, обстановкой движения, подходящей для смены полос движения. В частности, если обстановка движения задействуемого транспортного средства является любой из обстановок движения, проиллюстрированных на Фиг.2, то функция определения обстановки движения используется для определения того, что обстановка движения задействуемого транспортного средства является обстановкой движения, подходящей для смены полос движения. Когда обстановка движения задействуемого транспортного средства не является обстановкой движения, подходящей для смен полос движения, процесс возвращается на этап S1, с которого определение обстановки движения повторяется. Когда обстановка движения задействуемого транспортного средства является обстановкой движения, подходящей для смен полос движения, процесс переходит на этап S4. [0068] На этапе S4 устройство 19 управления использует функцию управления автономной сменой полосы движения для обнаружения подходящих областей. В частности, устройство 19 управления использует функцию управления автономной сменой полосы движения для обнаружения препятствий, существующих вокруг задействуемого транспортного средства, на основе информации изображения внешней среды вокруг транспортного средства, захваченной передней камерой и задней камерой, включенными в состав датчиков 11, и/или информации о движении, включающей в себя результаты обнаружения посредством переднего радара, заднего радара и боковых радаров, включенных в состав датчиков 11. Затем устройство 19 управления использует функцию управления автономной сменой полосы движения, чтобы определять области, которые расположены сбоку от задействуемого транспортного средства и в которых нет препятствий, в качестве подходящих областей. [0069] «Подходящие области» в одном или более вариантах осуществления настоящего изобретения относятся к относительным областям с учетом положения движения, когда задействуемое транспортное средство движется с текущей скоростью; поэтому, когда другое транспортное средство, присутствующее в окружении задействуемого транспортного средства, движется прямо спереди с той же скоростью, что и задействуемое транспортное средство, подходящие области не меняются. «Боковая сторона задействуемого транспортного средства» относится к области, в котором положение сбоку от задействуемого транспортного средства может быть принято в качестве целевого положения для смены полос движения, когда задействуемое транспортное средство меняет полосы движения (эта целевое положение также является относительным положением с учетом положения движения, когда задействуемое транспортное средство движется с текущей скоростью), и эта область (например, направление, размер и угол) может быть установлена надлежащим образом. Способы обнаружения подходящих областей OS будут описаны ниже со ссылкой на Фиг.6A-6F. Фиг.6A-6E являются видами сверху для описания подходящих областей. [0070] В примере обстановки, показанной на Фиг.6A, другое транспортное средство V1, которое является препятствием, не существует ни в соседней полосе L2 движения, смежной с полосой L1 движения, по которой движется задействуемое транспортное средство V0, ни в полосе L3 движения дальше за соседней полосой L2 движения (полоса L3 движения также будет упоминаться далее как следующая соседняя полоса L3 движения). В этом случае устройство 19 управления использует функцию управления автономной сменой полосы движения для обнаружения соседней полосы L2 движения и следующей смежной полосы L3 движения в качестве подходящих областей OS. Следует отметить, что обочины RS дороги исключаются из подходящих областей OS, поскольку обочины RS дороги главным образом находятся в пределах областей, в которых смена полос движения не может быть осуществлена. Следует отметить, однако, что когда обстановка движения задействуемого транспортного средства V0 является «обстановкой аварийной эвакуации» на дороге, на которой разрешена аварийная остановка или подобное на обочинах RS дороги, эти обочины RS дороги могут включаться в подходящие области OS (здесь и далее). [0071] В примере обстановки, показанной на Фиг.6B, другие транспортные средства V1 и V1, которые являются препятствиями, существуют в соседней полосе L2 движения, смежной с полосой L1 движения, по которой движется задействуемое транспортное средство V0, но в соседней полосе L2 движения имеется область, в которой никакие другие транспортные средства не существуют, между передним другим транспортным средства V1, впереди идущим пространства, смежного с полосой L1 движения, по которой движется задействуемое транспортное средство V0, и задним другим транспортным средством V1, движущимся позади этого пространства, и никакие другие транспортные средства не существуют в качестве препятствий на следующей соседней полосе L3 движения. Устройство 19 управления использует функцию управления автономной сменой полосы движения, чтобы обнаруживать в качестве подходящих областей OS следующую соседнюю полосу L3 движения, а также область соседней полосы L2 движения, в которой никакие другие транспортные средства не существуют. [0072] В примере обстановки, показанной на Фиг.6C, область, в которой никакие другие транспортные средства не существуют, имеется в соседней полосе L2 движения, как в примере, показанном на Фиг.6B, и область, в которой никакие другие транспортные средства не существуют, также имеется в следующей соседней полосе L3 движения между передним другим транспортным средством V1 и задним другим транспортным средством V1. В этом случае, устройство 19 управления использует функцию управления автономной сменой полосы движения, чтобы обнаруживать в качестве подходящих областей OS область в соседней полосе L2 движения, в которой никаких других транспортных средств не существует, а также область в следующей соседней полосе L3 движения, в которой никакие другие транспортные средства не существуют. [0073] В примере обстановки, показанной на Фиг.6D, область, в которой никакие другие транспортные средства не существуют, имеется в соседней полосе L2 движения, как в примере, показанном на Фиг.6B, и никакие другие транспортные средства не существуют в следующей соседней полосе L3 движения, но следующая соседняя полоса L3 движения включает в себя область RA, такую как строительный участок или пространство, занимаемое поврежденным транспортным средством, в котором задействуемое транспортное средство V0 двигаться не может. В этом случае устройство 19 управления использует функцию управления автономной сменой полосы движения для обнаружения подходящих областей OS посредством исключения области RA, такой как строительный участок или пространство, занимаемое поврежденным транспортным средством, в котором задействуемое транспортное средство V0 двигаться не может, из подходящих областей OS. Примеры области RA, в которой задействуемое транспортное средство V0 двигаться не может, включают в себя, в дополнение к строительному участку, область, в которой другое транспортное средство V1 паркуется или останавливается, а также область, в которой транспортным средствам запрещено движение из-за правил дорожного движения или тому подобного. Как показано на Фиг.6D, когда область RA, в которой задействуемое транспортное средство V0 не может двигаться из-за строительного участка или тому подобного, занимает половину или более следующей соседней полосы L3 движения (половину или более в направлении ширины дороги), например, оставшаяся часть менее половины области, может быть исключена из подходящих областей OS. [0074] В примере обстановки, показанной на Фиг.6E, область, в которой никакие другие транспортные средства не существуют, имеется в соседней полосе L2 движения, но другие транспортные средства V1 двигаются друг за другом по следующей соседней полосе L3 движения, и следующая соседняя полоса L3 движения не включает в себя пространство, в которое можно выполнить смену полос движения. В этом случае, устройство 19 управления использует функцию управления автономной сменой полосы движения для определения того, что подходящие области OS не могут быть обнаружены. [0075] В примере обстановки, показанной на Фиг.6F, смена полосы движения с соседней полосы L2 движения на следующую соседнюю полосу L3 движения запрещена разметкой RL, указывающей запрет смены полосы движения. На такой дороге, устройство 19 управления использует функцию управления автономной сменой полосы движения для определения того, что подходящие области OS не могут быть обнаружены. [0076] Устройство 19 управления в одном или более вариантах осуществления настоящего изобретения использует функцию управления автономной сменой полосы движения, чтобы обнаруживать подходящие области OS в направлении, из числа правого и левого направлений, которое подходит для смены полос движения в обстановке движения задействуемого транспортного средства V0. В одном или более вариантах осуществления настоящего изобретения направление, подходящее для смены полос движения в каждой обстановке движения, предварительно сохраняется в таблице, показанной на Фиг.2. Устройство 19 управления использует функцию управления автономной сменой полосы движения для обращения к таблице, показанной на Фиг.2, для получения информации о «направлении смены полос движения» в обстановке движения задействуемого транспортного средства. Например, когда обстановка движения задействуемого транспортного средства является «обстановкой изменения полосы движения по направлению к пункту назначения», устройство 19 управления использует функцию управления автономной сменой полосы движения, чтобы обратиться к таблице на Фиг.2, чтобы получить направление «в сторону полосы движения для движения к пункту назначения» в качестве «направления смены полос движения». Затем устройство 19 управления использует функцию управления автономной сменой полосы движения для обнаружения подходящих областей OS в полученном «направлении смены полос движения». [0077] Дополнительно или в качестве альтернативы, устройство 19 управления использует функцию управления автономной сменой полосы движения для обнаружения подходящих областей OS сбоку от транспортного средства V0. Например, даже когда области, в которых никакие препятствия не существуют, обнаруживаются в соседней полосе L2 движения и следующей соседней полосе L3 движения, если эти области отделены от текущего положения задействуемого транспортного средства V0 некоторым расстоянием или большим расстоянием и находятся позади или впереди задействуемого транспортного средства, может быть затруднительно сменить полосы движения в такие области, которые, следовательно, в качестве подходящих областей OS не обнаруживаются. [0078] Снова ссылаясь на Фиг.5A на этапе S5 устройство 19 управления использует функцию управления автономной сменой полосы движения для установки целевых положений для смен полос движения. Фиг.7 является схемой для описания способа установки целевых положений для смен полос движения. Например, как показано на Фиг.7, устройство 19 управления использует функцию управления автономной сменой полосы движения для установки положения, которое находится в пределах подходящей области OS в соседней полосе L2 движения, обнаруженной на этапе S4, и которая смещена назад от положения задействуемого транспортного средства V0 на небольшое расстояние, и положения, которое находится в пределах подходящей области OS в следующей соседней полосе L3 движения, обнаруженной на этапе S4, и которая смещена назад от положения задействуемого транспортного средства V0 на небольшое расстояние, в качестве целевых положений для смен полос движения (например, положения транспортных средств V01 и V02, показанных на Фиг.7). Целевые положения для смен полос движения (положения транспортных средств V01 и V02) являются относительными положениями по отношению к положению, в котором движется задействуемое транспортное средство V0. Другими словами, при условии, что положение, когда задействуемое транспортное средство V0 двигается с текущей скоростью без изменения скорости, является опорным положением, то положения, расположенные в поперечном направлении позади этого опорного положения на небольшом расстоянии, устанавливаются в качестве целевых положений для смен полос движения. Это позволяет задействуемому транспортному средству V0 менять полосы движения на следующую соседнюю полосу L3 движения через соседнюю полосу L2 движения без ускорения задействуемого транспортного средства V0, когда задействуемое транспортное средство V0 перемещается в целевые положения для смен полос движения. [0079] Устройство 19 управления может использовать функцию управления автономной сменой полосы движения для установки целевых положений для смен полос движения, принимая во внимание легкость смен полос движения, например, ситуацию, когда подходящие области OS в соседней полосе L2 движения и следующей соседней полосе L3 движения включают в себя область, в которой задействуемое транспортное средство V0 может перемещаться, и ситуацию, когда другое транспортное средство V1, которое может въезжать в подходящую область OS, не существует в окружении задействуемого транспортного средства V0. Например, когда у другого транспортного средства V1, существующего в окружении подходящей области OS, включаются указатели поворота по направлению к подходящей области OS, и/или когда оно перемещается в сторону подходящей области OS, функция управления автономной сменой полосы движения используется для определения того, что другое транспортное средство V1 может въезжать в подходящую область OS. В этом случае другое положение в подходящей области OS, в которую другое транспортное средство V1 может въезжать с меньшей вероятностью, может быть установлено как целевое положение. В приведенном выше примере целевые положения для смен полос движения устанавливаются в положения, расположенные позади задействуемого транспортного средства V0 и в пределах подходящих областей OS в соседней полосе L2 движения и следующей соседней полосе L3 движения. В альтернативном варианте осуществления целевые положения для смен полос движения могут быть установлены в положения, расположенные впереди задействуемого транспортного средства V0 и в пределах подходящих областей OS в соседней полосе L2 движения и следующей соседней полосе L3 движения. В альтернативном варианте осуществления этап S105 может включать в себя установку целевых маршрутов для выполнения смен полос движения вместо установки целевых положений для смен полос движения. [0080] Возвращаясь к Фиг.5A, на этапе S6 устройство 19 управления устанавливает поперечную скорость управления первой автономной сменой полосы движения посредством функции управления автономной сменой полосы движения. В частности, заранее определенная первая поперечная скорость Vh1 устанавливается как поперечная скорость управления первой автономной сменой полосы движения, как показано на графике на Фиг.3F. [0081] На этапе S7 устройство 19 управления использует функцию управления автономной сменой полосы движения, чтобы оценить время, необходимое для того, чтобы задействуемое транспортное средство переместилось из текущего положения в целевое положение для смены полосы движения в качестве требуемого времени T1 на основе скорости транспортного средства и/или ускорения задействуемого транспортного средства. Соответственно, когда ширина полосы движения велика, когда дорога перегружена, или когда выполняются последовательные смены полосы движения, как, например, в этом примере, требуемое время T1 оценивается как длительное время. [0082] На этапе S8 устройство 19 управления использует функцию управления автономной сменой полосы движения для оценки подходящей области OS после требуемого времени T1, полученного оценкой на этапе S7. В частности, устройство 19 управления использует функцию управления автономной сменой полосы движения для оценки положения движения после требуемого времени T1 другого транспортного средства V1, существующего в окружении задействуемого транспортного средства V0, на основе скорости транспортного средства и ускорения другого транспортного средства V1. Например, устройство 19 управления использует функцию управления автономной сменой полосы движения для повторного обнаружения позиционной информации другого транспортного средства V1, тем самым вычисляя вектор v0 скорости, вектор a0 ускорения и позиционный вектор p0 другого транспортного средства V1, как показано на Фиг.8А. [0083] Как показано на Фиг.8A, когда направление движения задействуемого транспортного средства V0 проходит вдоль оси X, а направление ширины дороги проходит вдоль оси Y, вектор v0 скорости другого транспортного средства V1 представляется следующим уравнением (1). v0=vx0i + vy0j ··· (1) В приведенном выше уравнении (1) vx0 представляет собой компоненту скорости в направлении оси X вектора v0 скорости другого транспортного средства V1, а vy0 представляет компоненту скорости в направлении оси Y вектора v0 скорости другого транспортного средства V1. В приведенном выше уравнении (1) i представляет собой единичный вектор в направлении оси X, а j представляет собой единичный вектор в направлении оси Y (то же самое относится к следующим уравнениям (2), (3) и (6)). [0084] Вектор a0 ускорения другого транспортного средства V1 может быть получен в соответствии со следующим уравнением (2), в то время как позиционный вектор p0 другого транспортного средства V1 может быть получен в соответствии со следующим уравнением (3). a0=ax0i + ay0j ··· (2) p0=px0i + py0j ··· (3) В приведенном выше уравнении (2) ax0 представляет компоненту ускорения в направлении оси X вектора a0 ускорения другого транспортного средства V1, а ay0 представляет компоненту ускорения в направлении оси Y вектора a0 ускорения другого транспортного средства V1. В приведенном выше уравнении (3) px0 представляет позиционную компоненту в направлении оси X позиционного вектора p0 другого транспортного средства V1, а py0 представляет позиционную компоненту в направлении оси Y позиционного вектора p0 другого транспортного средства V1. [0085] Затем устройство 19 управления использует функцию управления автономной сменой полосы движения для вычисления позиционного вектора pT1 после требуемого времени T1 другого транспортного средства V1, как показано на Фиг.8B. В частности, устройство 19 управления использует функцию управления автономной сменой полосы движения для вычисления позиционного вектора pT1 после требуемого времени T1 другого транспортного средства V1 на основе следующих уравнений с (4) по (6). pxT1 = px0 + vx0T1 + 1/2 (ax0T1)2 ··· (4) pyT1 = py0 + vy0T1 + 1/2 (ay0T1)2 ··· (5) pT1 = pxT1i + pyT1j ··· (6) В приведенных выше уравнениях (4) и (5) pxT1 представляет позиционную компоненту в направлении оси X позиционного вектора pT1 после требуемого времени T1 другого транспортного средства V1, pyT1 представляет позиционную компоненту в направлении оси Y позиционного вектора pT1 после требуемого времени T1 другого транспортного средства V1, vx0T1 представляет скорость движения в направлении оси X другого транспортного средства V1 после требуемого времени T1, vy0T1 представляет скорость движения в направлении оси Y другого транспортного средства V1 после требуемого времени T1, ax0T1 представляет ускорение в направлении оси X другого транспортного средства V1 после требуемого времени T1, а ay0T1 представляет ускорение в направлении оси Y другого транспортного средства V1 после требуемого времени T1. [0086] Устройство 19 управления использует функцию управления автономной сменой полосы движения для оценки положений после требуемого времени T1 всех других транспортных средств V1, имеющихся в окружении задействуемого транспортного средства V0. Затем, устройство 19 управления использует функцию управления автономной сменой полосы движения для оценки подходящей области OS после требуемого времени T1 на основе положений после требуемого времени T1 других транспортных средств V1. Устройство 19 управления использует функцию управления автономной сменой полосы движения для оценки подходящей области OS после требуемого времени T1, принимая во внимание ситуацию предписания полос движения после требуемого времени T1, наличие препятствий на дороге, наличие или отсутствие преграды на соседней полосе L2 движения и следующей соседней полосе L3 движения, а также наличие участка, такого как строительный участок, в который задействуемое транспортное средство перемещаться не может. Устройство 19 управления использует функцию управления автономной сменой полосы движения для оценки подходящей области OS после требуемого времени T1 как на этапе S4. [0087] На этапе S9 устройство 19 управления использует функцию управления автономной сменой полосы движения для получения информации о требуемой области RR. Требуемая область RR относится к области, имеющей размер, необходимый для того, чтобы задействуемое транспортное средство V0 сменило полосы движения, или области, имеющей размер, который по меньшей мере равен или больше размера, который задействуемое транспортное средство V0 занимает на поверхности дороги. В одном или более вариантах осуществления настоящего изобретения, когда требуемая область RR установлена в целевом положении для смены полос движения, а подходящая область OS в каждой из соседней полосы L2 движения и следующей соседней полосы L3 движения включает в себя эту требуемую область RR, выполняется определение, что пространство, соответствующее требуемой области RR, существует в пределах подходящей области OS в каждой из соседней полосы L2 движения и следующей соседней полосы L3 движения, и смена полосы движения разрешается. В одном или более вариантах осуществления настоящего изобретения в памяти устройства 19 управления хранится информация, включающая в себя форму и размер требуемой области RR, а функция управления автономной сменой полосы движения используется для получения информации о требуемой области RR из памяти устройства 19 управления. [0088] На этапе S10 устройство 19 управления использует функцию управления автономной сменой полосы движения, чтобы определить, имеется ли пространство в пределах подходящей области OS в каждой из соседней полосы L2 движения и следующей соседней полосы L3 движения после требуемого времени T1. Пространство соответствует требуемой области RR, полученному на этапе S9. Подходящая область OS в каждой из соседней полосы L2 движения и следующей соседней полосы L3 движения после требуемого времени T1 оценивается на этапе S8. В частности, как показано на Фиг.9А, устройство 19 управления использует функцию управления автономной сменой полосы движения для установки требуемой области RR в целевое положение для смены полос движения (положение задействуемого транспортного средства V0), которое установлено на этапе S5. Затем устройство 19 управления использует функцию управления автономной сменой полосы движения, чтобы определить, включает ли в себя подходящая область OS в каждой из соседней полосы L2 движения и следующей соседней полосы L3 движения после требуемого времени T1 требуемую область RR. [0089] Например, в примере, показанном на Фиг.9A, подходящая область OS в каждой из соседней полосы L2 движения и следующей соседней полосы L3 движения после требуемого времени T1 не включает в себя заднюю часть требуемой области RR. Устройство 19 управления следовательно использует функцию управления автономной сменой полосы движения, чтобы определить, имеется ли пространство, соответствующее требуемой области RR, в пределах подходящей области OS в каждой из соседней полосы L2 движения и следующей соседней полосы L3 движения после требуемого времени T1. С другой стороны, как показано на Фиг.9B, когда подходящая область OS в каждой из соседней полосы L2 движения и следующей соседней полосы L3 движения после требуемого времени T1 включает в себя требуемую область RR, устройство 19 управления использует функцию управления автономной сменой полосы движения, чтобы определить, что пространство, соответствующее требуемой области RR, имеется в пределах подходящей области OS в каждой из соседней полосы L2 движения и следующей соседней полосы L3 движения после требуемого времени T1. Когда пространство, соответствующее требуемой области RR, имеется в пределах подходящей области OS в каждой из соседней полосы L2 движения и следующей соседней полосы L3 движения после требуемого времени T1, процесс переходит на этап S12, показанный на Фиг.5B, а когда такого пространства нет, процесс переходит на этап S11. [0090] На этапе S11 делается определение, что подходящая область OS в каждой из соседней полосы L2 движения и следующей соседней полосы L3 движения после требуемого времени T1 не включает в себя требуемую область RR, и пространство, которое соответствует требуемой области RR в пределах подходящей области OS в каждой из соседней полосы L2 движения и следующей соседней полосы L3 движения после требуемого времени T1, не может быть обнаружено. Следовательно, на этапе S10 устройство 19 управления использует функцию управления автономной сменой полосы движения для изменения целевых положений для смен полос движения. В частности, устройство 19 управления использует функцию управления автономной сменой полосы движения, чтобы переустановить целевые положения для смен полос движения так, чтобы подходящая область OS в каждой из соседней полосы L2 движения и следующей соседней полосы L3 движения после требуемого времени T1 включала в себя требуемую область RR. Например, когда задняя часть требуемой области RR не включается в подходящую область OS в каждой из соседней полосы L2 движения и следующей соседней полосы L3 движения после требуемого времени T1, как показано на Фиг.9A, целевые положения для смен полос движения смещаются вперед. Это позволяет включить требуемую область RR в подходящую область OS в каждой из соседней полосы L2 движения и следующей соседней полосы L3 движения после требуемого времени T1, как показано на Фиг.9B, и выполняется определение, что пространство, которое соответствует требуемой области RR в пределах подходящей области OS в каждой из соседней полосы L2 движения и следующей соседней полосы L3 движения после требуемого времени T1, может быть обнаружено. За этапом S11 следует этап S6, на котором снова выполняются установка поперечной скорости, оценка требуемого времени T1, определение подходящих областей OS и т.п. [0091] С другой стороны, когда на этапе S10 с Фиг.5A определяется, что подходящая область OS в каждой из соседней полосы L2 движения и следующей соседней полосы L3 движения после требуемого времени T1 включает в себя требуемую область RR, процесс переходит на этап S12, показанный на Фиг.5B. На этапе S12 с Фиг.5B, устройство 19 управления использует функцию управления автономной сменой полосы движения для выполнения процесса запроса принятия для автономного управления последовательными сменами полосы движения. На этапе S12 устройство 19 управления определило ситуацию, в которой возможно автономное управление последовательными сменами полосы движения посредством процессов этапов с S1 по S10; следовательно, перед фактическим выполнением управления автономной сменой полосы движения устройство 19 управления запрашивает у водителя ответ относительно того, принимать ли выполнение управления автономной сменой полосы движения, чтобы побудить водителя самостоятельно подтвердить безопасность. [0092] Процесс запроса принятия управления автономной сменой полосы движения, выполняемый на этапе S11, выполняется путем предоставления водителю информации о смене полосы движения, относящейся к первой смене полосы движения, через устройство 15 представления, включающему в себя дисплей, динамик, сигнальную лампу, вибратор сиденья и тому подобное. В ответ на информацию о смене полосы движения, предоставляемую функцией представления информации о смене полосы движения, водитель визуально подтверждает происходящее вокруг. Когда водитель решает, что смена полосы движения может быть выполнена, водитель задействует дисковый переключатель и/или сенсорный экран устройства 16 ввода или указатель поворота бортового оборудования 14, или вводит звук в микрофон. [0093] На этапе S13 устройство 19 управления определяет, принимает ли водитель автономное управление последовательными сменами полосы движения в ответ на запрос принятия на этапе S12. Когда водитель принимает управление автономной сменой полосы движения, процесс переходит к этапу S14, тогда как когда водитель не принимает управление автономной сменой полосы движения, процесс возвращается к этапу S1 без выполнения управления автономной сменой полосы движения. [0094] На этапе S14 устройство 19 управления использует функцию управления автономной сменой полосы движения для получения ограничения Z по времени для смен полос движения. В одном или более вариантах осуществления настоящего изобретения, как показано на Фиг.2, в таблице в качестве ограничения Z по времени хранится время до приближения задействуемого транспортного средства к точке, в которой смена полосы движения затруднена, в каждой обстановке движения. Устройство 19 управления использует функцию управления автономной сменой полосы движения для обращения к таблице, показанной на Фиг.2, для получения ограничения Z по времени в обстановке движения задействуемого транспортного средства. Например, в «обстановке изменения полосы движения по направлению к пункту назначения» из числа примеров, показанных на Фиг.2, ограничение по времени хранится в качестве (время до достижения точки смены полосы движения - α) секунд. В этом случае устройство 19 управления использует функцию управления движением для обращения к таблице, показанной на Фиг.2, для вычисления времени до достижения точки изменения полосы движения и получения (вычисленного времени до достижения точки смены полосы движения - α) секунд в качестве ограничения Z по времени. Константа α составляет несколько секунд (например, 5 секунд) и может быть надлежащим образом установлена для каждой обстановки движения. Например, когда время до достижения точки смены полосы движения составляет 30 секунд, а α равна 5 секундам, ограничение Z по времени для смены полос движения составляет 25 секунд. [0095] На этапе S15 выполняется процесс начала для управления первой автономной сменой полосы движения. В процессе начала для управления первой автономной сменой полосы движения устройство 19 управления использует функцию управления автономной сменой полосы движения для установки начального момента L, в которое начинается управление автономной сменой полосы движения. Способ установки начального момента L не ограничен особым образом, и начальный момент L может быть установлен, например, любым из следующих способов (1)-(8), описанных ниже. Другими словами, (1) в качестве начального момента L для управления автономной сменой полосы движения устанавливают уникальный момент. Например, момент после истечения предварительно определенного времени (например, 6 секунд) с согласия водителя с управлением автономной сменой полосы движения устанавливается как начальный момент L для управления автономной сменой полосы движения. (2) Начальный момент L для управления автономной сменой полосы движения устанавливают на основе уровня необходимости смены полос движения, показанного на Фиг.2. В частности, уровень необходимости смены полос движения в обстановке движения задействуемого транспортного средства получается из таблицы, показанной на Фиг.2, и когда уровень необходимости смены полос движения не меньше предварительно определенного значения, начальный момент L для управления автономной сменой полосы движения устанавливают на более ранний момент, чем в случае, когда уровень необходимости смены полос движения меньше, чем упомянутое предварительно определенное значение. (3) Начальный момент L для управления автономной сменой полосы движения устанавливают на основе ограничения Z по времени для смены полос движения, показанного на Фиг.2. В частности, ограничение Z по времени для смены полос движения в обстановке движения задействуемого транспортного средства получается из таблицы, показанной на Фиг.2, и когда ограничение Z по времени для смены полос движения меньше предварительно определенного Z-го времени, начальный момент L для управления автономной сменой полосы движения устанавливают на более ранний момент, чем в случае, когда ограничение Z по времени для смены полос движения не меньше, чем упомянутое предварительно определенное Z-е время. (4) Начальный момент L для управления автономной сменой полосы движения устанавливают на основе требуемого времени T1 для смены полос движения. В частности, когда требуемое время T1 для смены полос движения, полученное оценкой на этапе S6 с Фиг.5A, меньше предварительно определенного T-го времени, начальный момент L для управления автономной сменой полосы движения устанавливают на более ранний момент, чем в случае, когда требуемое время T1 для смены полос движения не меньше, чем упомянутое предварительно определенное T-е время. [0096] (5) Начальный момент L для управления автономной сменой полосы движения устанавливают на основе ограничения Z по времени и требуемого времени T1 для смены полос движения. В частности, запасное время Y получают из требуемого времени T1 для смены полос движения и ограничения Z по времени для смены полос движения (например, ограничение Z по времени - требуемое время T1 = запасное время Y), и когда запасное время Y меньше, чем предварительно определенное Y-е время, начальный момент L для управления автономной сменой полосы движения устанавливают на более ранний момент, чем в случае, когда запасное время Y не меньше упомянутого предварительно определенного Y-го времени. (6) Начальный момент L для управления автономной сменой полосы движения устанавливают на основе уровня O внимания (уровня приверженности), который представляет степень вовлеченности водителя в вождение. Например, выполняется определение, разговаривает ли водитель или звонит ли он по громкой связи, путем обнаружения голоса водителя, используя устройство 16 ввода, такое как бортовой микрофон или устройство громкой связи, и когда водитель разговаривает или выполняет звонок по громкой связи, определяется, что уровень O внимания водителя меньше O-го порогового значения, и начальный момент L для управления автономной сменой полосы движения устанавливают на более поздний момент, чем момент в случае, когда уровень O внимания водителя не меньше O-го порогового значения. [0097] (7) Начальный момент L для управления автономной сменой полосы движения устанавливается на основе уровня K загруженности дорожного движения. Как объяснено в третьем варианте осуществления, уровень K загруженности дорожного движения определяется на основе, например, расстояния до предыдущего транспортного средства, расстояния до следующего транспортного средства, количества окружающих транспортных средств, уровня загруженности, содержащийся в информации VICS (зарегистрированный товарный знак), и/или степени отклонения между допустимой скоростью и фактической скоростью задействуемого транспортного средства. Когда уровень K загруженности дорожного движения не меньше K-ого предварительно определенного значения, устройство 19 управления устанавливает начальный момент L для управления автономной сменой полосы движения на более раннее время, чем в случае, когда уровень K загруженности дорожного движения меньше, чем K-ого предварительно определенного значения. (8) Начальный момент L для управления автономной сменой полосы движения устанавливают на основе вероятности B смены полос движения. Например, степень, с которой можно гарантировать, что задействуемое транспортное средство меняет полосы движения, может быть получена как вероятность B на основе наличия или отсутствия установки пункта назначения и/или расстояния до двигающегося впереди транспортного средства. В частности, когда пункт назначения установлен и необходимо сменить полосы движения для того, чтобы задействуемое транспортное средство достигло упомянутого пункта назначения, выполняется определение, что вероятность B смены полос движения не меньше B-го порогового значения. Дополнительно или в качестве альтернативы, когда расстояние до двигающегося впереди транспортного средства меньше предварительно определенного расстояния, выполняется определение, что водитель желает сменить полосы движения, и определяется, что вероятность B смены полос движения не меньше B-го порогового значения. Затем, когда вероятность B смены полос движения не меньше B-го порогового значения, начальный момент L для управления автономной сменой полосы движения устанавливают на более ранний момент, чем в случае, когда вероятность B смены полос движения меньше, чем упомянутое B-е пороговое значение. Таким образом, начальный момент L для управления автономной сменой полосы движения устанавливают как указано выше. Вышеописанные (1)-(8) являются примерами способа установки начального момента L, и этот способ вышеупомянутым не ограничен. [0098] После установки начального момента L, устройство 19 управления может устанавливать, перед началом управления автономной сменой полосы движения, момент P представления предварительного уведомления для представления информации о смене полосы движения, указывающей, что управление автономной сменой полосы движения будет начато. [0099] Когда установленный начальный момент L достигнут, устройство 19 управления использует функцию управления автономной сменой полосы движения для начала управления автономной сменой полосы движения. В частности, устройство 19 управления использует функцию управления автономной сменой полосы движения, чтобы позволить устройству 18 управления вождением начать управление работой исполнительного механизма рулевого управления так, чтобы задействуемое транспортное средство перемещалось в целевые положения для смен полос движения, которые устанавливаются на этапе S5 или этапе S11 на Фиг.5А. После начала управления автономной сменой полосы движения устройство 15 представления может представить информацию о смене полосы движения, указывающую, что выполняется управление автономной сменой полосы движения. [0100] Устройство 19 управления управляет поперечной скоростью при управлении первой автономной сменой полосы движения посредством функции управления автономной сменой полосы движения. Устройство 19 управления ускоряет поперечную скорость Vh задействуемого транспортного средства V0 до предварительно определенной первой поперечной скорости Vh1 в полосе L1 движения задействуемого транспортного средства и выполняет смену полосы движения с полосы L1 движения задействуемого транспортного средства на соседнюю полосу L2 движения, поддерживая первую поперечную скорость Vh1 посредством функции управления автономной сменой полосы движения, как показано на графике Фиг.3F. [0101] На этапах с S16 по S18 на Фиг.5B, аналогично этапам S4 и S7-S8 на Фиг.5A, обнаруживаются текущая подходящая область OS и подходящая область OS после необходимого времени T2 для того, чтобы задействуемое транспортное средство V0 переместилось в целевое положение, связанное с первым изменением полосы движения (смена полосы движения с полосы L1 на полосу L2 на Фиг.3F). Затем, на этапе S19 устройство 19 управления использует функцию управления автономной сменой полосы движения, чтобы определить, имеется ли пространство в пределах подходящей области OS в каждой из соседней полосы L2 движения и следующей соседней полосы L3 движения после требуемого времени T2. Пространство соответствует требуемой области RR, полученной на этапе S9. Подходящая область OS в каждой из соседней полосы L2 движения и следующей соседней полосы L3 движения после требуемого времени T2 оценивается на этапе S18. Затем устройство 19 управления использует функцию управления автономной сменой полосы движения, чтобы установить требуемую область RR в целевое положение для каждой из первой и второй смен полос движения. Когда подходящая область OS в каждой из соседней полосы L2 движения и следующей соседней полосы L3 движения после требуемого времени T2 включает в себя требуемую область RR, устройство 19 управления определяет, что пространство, соответствующее требуемой области RR, имеется в пределах подходящей области OS в каждой из соседней полосы L2 движения и следующей соседней полосы L3 движения после требуемого времени T2, и процесс переходит на этап S20 с Фиг.5C. С другой стороны, когда устройство 19 управления определяет, что пространство, соответствующее требуемой области RR, отсутствует в пределах подходящей области OS в по меньшей мере одной из соседней полосы L2 движения и следующей соседней полосы L3 движения после требуемого времени T2, процесс переходит на этап S20. Процесс этапа S20 и последующие процессы будут описаны ниже со ссылкой на Фиг.5E. [0102] На этапе S21 с Фиг.5C, устройство 19 управления использует функцию управления автономной сменой полосы движения, чтобы определить, истекло ли ограничение Z по времени, полученное на этапе S14, с момента начала на этапе S15 управления первой автономной сменой полосы движения. Когда истекшее время S1 после начала управления первой автономной сменой полосы движения превышает ограничение Z по времени, то есть когда целевое положение для первой смены полосы движения не может быть достигнуто даже по истечению ограничения Z по времени с момента начала управления автономной сменой полосы движения, процесс переходит на этап S23. На этапе S23 устройство 19 управления использует функцию управления автономной сменой полосы движения для выполнения процесса прекращения управления первой автономной сменой полосы движения. В частности, устройство 19 управления использует функцию управления автономной сменой полосы движения, чтобы сообщить водителю информацию, указывающую, что управление автономной сменой полосы движения будет прекращено. Например, устройство 19 управления управляет устройством 15 представления, чтобы предоставить водителю сообщение «Смены полос движения будут прекращены из-за истечения времени», а затем завершает управление автономной сменой полосы движения. В процессе прекращения управления автономной сменой полосы движения устройство 19 управления может оставить положение движения задействуемого транспортного средства в направлении ширины дороги в положении, в котором завершено управление автономной сменой полосы движения, или может также восстановить положение движения до положения, в котором управление автономной сменой полосы движения началось. Когда положение движения восстанавливается до положения, в котором управление автономной сменой полосы движения началось, водителю может быть предоставлено сообщение, такое как «Исходная положения будет восстановлена из-за истечения времени». [0103] С другой стороны, когда на этапе S21 истекшее время S1 с начала управления автономной сменой полосы движения не превышает ограничения Z по времени, процесс переходит на этап S22. На этапе S22 устройство 19 управления использует функцию управления автономной сменой полосы движения, чтобы определить, достигло ли задействуемое транспортное средство целевого положения для первой смены полосы движения. Когда задействуемое транспортное средство достигло целевого положения для первой смены полосы движения, процесс переходит на этап S24. На этапе S24 управление первой автономной сменой полосы движения завершается с использованием функции управления автономной сменой полосы движения, и поэтому устройство 15 представления представляет информацию о смене полосы движения, указывающую, что первая автономная смена полосы движения завершена. Когда на этапе S22 выполняется определение того, что задействуемое транспортное средство не достигло целевого положения для первой смены полосы движения, процесс возвращается на этап S16, чтобы продолжить управление автономной сменой полосы движения. На этапе S25 устройство 19 управления использует функцию управления автономной сменой полосы движения для перехода ко управлению второй автономной сменой полосы движения. Таким образом, на этапах S25-S29, подобных этапам S4 и S6-S8 на Фиг.5A и этапах S16-S18 на Фиг.5B, подходящая область OS после необходимого времени T3 для движения задействуемого транспортного средства V0 в целевое положение, связанное со вторым изменением полосы движения (смена полосы движения с полосы L2 на полосу L3 на Фиг.3F), обнаруживается, и поперечная скорость управления второй автономной сменой полосы движения. [0105] Устройство 19 управления определяет уровень K загруженности дорожного движения на основе информации о движении, полученной с использованием функции управления автономной сменой полосы движения, чтобы установить поперечную скорость управления второй автономной сменой полосы движения. Когда уровень K загруженности дорожного движения используется для установки начального момента L управления автономной сменой полосы движения на этапе S15, может использоваться уровень K загруженности дорожного движения. Устройство 19 управления сравнивает определенный уровень K загруженности дорожного движения и K-ое предварительно определенное значение уровня загруженности дорожного движения посредством функции управления автономной сменой полосы движения. Когда уровень K загруженности дорожного движения меньше K-ого предварительно определенного значения, устройство 19 управления устанавливает вторую поперечную скорость Vh2 для управления второй автономной сменой полосы движения, как показано на графике на Фиг.3F. [0106] Кроме того, когда уровень K загруженности дорожного движения выше K-ого предварительно определенного значения, устройство 19 управления вычисляет пятую поперечную скорость Vh5, которая представляет собой поперечную скорость управления второй автономной сменой полосы движения посредством функции управления автономной сменой полосы движения с использованием вышеописанного уравнения (b). Например, когда вторая поперечная скорость Vh2 составляет 5 м/с, а коэффициент C2 равен 0,8, то пятая поперечная скорость Vh5 составляет 4 м/с. Устройство 19 управления устанавливает вычисленную пятую поперечную скорость Vh5 в качестве поперечной скорости управления второй автономной сменой полосы движения. [0107] Затем, на этапе S29 устройство 19 управления использует функцию управления автономной сменой полосы движения, чтобы определить, имеется ли пространство в пределах подходящей области OS в следующей соседней полосе L3 движения после требуемого времени T3. Пространство соответствует требуемой области RR, полученной на этапе S9. Подходящая область OS в следующей соседней полосе L3 движения после требуемого времени T3 оценивается на этапе S27. Затем устройство 19 управления использует функцию управления автономной сменой полосы движения, чтобы установить требуемую область RR в целевое положение для смены полосы движения. Когда подходящая область OS в следующей соседней полосе L3 движения после требуемого времени T3 включает в себя требуемую область RR, устройство 19 управления определяет, что пространство, соответствующее требуемой области RR, имеется в пределах подходящей области OS в следующей соседней полосе L3 движения после требуемого времени T3, и процесс переходит на этап S28. С другой стороны, когда устройство 19 управления определяет, что пространство, соответствующее требуемой области RR, отсутствует в пределах подходящей области OS в следующей соседней полосе L3 движения после требуемого времени T3, процесс переходит на этап S30. Процесс этапа S30 и последующие процессы будут описаны ниже со ссылкой на Фиг.5E. [0108] На этапе S31 устройство 19 управления использует функцию управления автономной сменой полосы движения для выполнения процесса запроса принятия для автономной управления второй сменой полосы движения. На этапе S31 устройство 19 управления определило ситуацию, в которой автономное управление последовательными сменами полосы движения возможно посредством процессов на этапах с S1 по S10, а также определило ситуацию, в которой управление второй автономной сменой полосы движения возможно посредством процессов этапов с S25 по S29; поэтому перед фактическим выполнением управления второй автономной сменой полосы движения устройство 19 управления запрашивает у водителя ответ о том, принимать ли выполнение управления второй автономной сменой полосы движения, чтобы побудить водителя самостоятельно подтвердить безопасность. На этапе S32 устройство 19 управления определяет, принимает ли водитель управление второй автономной сменой полосы движения в ответ на запрос принятия на этапе S31. Поскольку запрос принятия и подтверждение принятия для управления второй автономной сменой полосы движения такие же, как и в первом автономном управлении сменой полосы движения, их подробное описание опускается. [0109] На этапе S34, как и в вышеописанном процессе на этапе S14, устройство 19 управления использует функцию управления автономной сменой полосы движения для получения ограничения Z по времени для второй смены полосы движения. В одном или более вариантах осуществления настоящего изобретения, как показано на Фиг.2, в таблице в качестве ограничения Z по времени хранится время до приближения задействуемого транспортного средства к точке, в которой смена полосы движения затруднена, в каждой обстановке движения. Устройство 19 управления использует функцию управления автономной сменой полосы движения для обращения к таблице, показанной на Фиг.2, для получения ограничения Z по времени в обстановке движения задействуемого транспортного средства. Например, в «обстановке изменения полосы движения по направлению к пункту назначения» из числа примеров, показанных на Фиг.2, ограничение по времени хранится в качестве (время до достижения точки смены полосы движения - α) секунд. В этом случае устройство 19 управления использует функцию управления движением для обращения к таблице, показанной на Фиг.2, для вычисления времени до достижения точки изменения полосы движения и получения (вычисленного времени до достижения точки смены полосы движения - α) секунд в качестве ограничения Z по времени. Константа α составляет несколько секунд (например, 5 секунд) и может быть надлежащим образом установлена для каждой обстановки движения. Например, когда время до достижения точки смены полосы движения составляет 30 секунд, а α равна 5 секундам, ограничение Z по времени для смены полос движения составляет 25 секунд. [0110] На этапе S35 осуществляется процесс начала для автономной управления второй сменой полосы движения. В процессе начала для управления автономной сменой полосы движения устройство 19 управления использует функцию управления автономной сменой полосы движения для установки начального момента L, в который автономное управление второй сменой полосы движения начинается. Способ установки начального момента L не ограничен особым образом, и начальный момент L может быть установлен, например, любым из способов (1)-(8), которые были описаны выше для этапа S15 с Фиг.5B. После установки начального момента L, устройство 19 управления может устанавливать, перед началом автономной управления второй сменой полосы движения, момент P представления предварительного уведомления для представления информации о смене полосы движения, указывающей, что управление второй автономной сменой полосы движения будет начато. [0111] Когда установленный начальный момент L достигнут, устройство 19 управления использует функцию управления автономной сменой полосы движения для начала автономной управления второй сменой полосы движения. В частности, устройство 19 управления использует функцию управления автономной сменой полосы движения, чтобы позволить устройству 18 управления вождением начать управление работой исполнительного механизма рулевого управления так, чтобы задействуемое транспортное средство перемещалось в целевое положению для смен полос движения, которое установлено на этапе S5 или этапе S11 на Фиг.5А. После начала управления автономной сменой полосы движения устройство 15 представления может представить информацию о смене полосы движения, указывающую, что выполняется управление автономной сменой полосы движения. [0112] Устройство 19 управления регулирует поперечную скорость управления второй автономной сменой полосы движения посредством функции управления автономной сменой полосы движения. Устройство 19 управления замедляет поперечную скорость Vh задействуемого транспортного средства V0 с первой поперечной скорости Vh1 до пятой поперечной скорости Vh5 в соседней полосе L2 и выполняет смену полосы движения со смежной полосы L2 на следующую смежную полосу L3, сохраняя при этом пятую поперечную скорость Vh5 посредством функции управления автономной сменой полосы движения, как показано на графике Фиг.3F. [0113] На этапах с S36 по S38 на Фиг.5D, аналогично этапам S4 и S7-S8 на Фиг.5A и этапам S16-S18 на Фиг.5B, обнаруживаются текущая подходящая область OS и подходящая область OS после необходимого времени T4 для того, чтобы задействуемое транспортное средство V0 переместилось в целевое положение, связанное со вторым изменением полосы движения (смена полосы движения с полосы L2 на полосу L3 на Фиг.3F). Затем, на этапе S39 устройство 19 управления использует функцию управления автономной сменой полосы движения, чтобы определить, имеется ли пространство в пределах подходящей области OS в следующей соседней полосе L3 движения после требуемого времени T4. Пространство соответствует требуемой области RR, полученной на этапе S9. Подходящая область OS в следующей соседней полосе L3 движения после требуемого времени T4 оценивается на этапе S38. Затем устройство 19 управления использует функцию управления автономной сменой полосы движения, чтобы установить требуемую область RR в целевое положение для второй смены полосы движения. Когда подходящая область OS в следующей соседней полосе L3 движения после требуемого времени T4 включает в себя требуемую область RR, устройство 19 управления определяет, что пространство, соответствующее требуемой области RR, имеется в пределах подходящей области OS в следующей соседней полосе L3 движения после требуемого времени T4, и процесс переходит на этап S40. С другой стороны, когда устройство 19 управления определяет, что пространство, соответствующее требуемой области RR, отсутствует в пределах подходящей области OS в следующей соседней полосе L3 движения после требуемого времени T4, процесс переходит на этап S41. Процесс этапа S41 и последующие процессы будут описаны ниже со ссылкой на Фиг.5E. [0114] На этапе S40 устройство 19 управления использует функцию управления автономной сменой полосы движения, чтобы определить, истекло ли ограничение Z по времени, полученное на этапе S34, с момента начала на этапе S35 автономной управления второй сменой полосы движения. Когда истекшее время S2 после начала автономной управления второй сменой полосы движения превышает ограничение Z по времени, то есть когда целевое положение для второй смены полосы движения не может быть достигнуто даже по истечению ограничения Z по времени с момента начала управления автономной сменой полосы движения, процесс переходит на этап S42. На этапе S42 устройство 19 управления использует функцию управления автономной сменой полосы движения для выполнения процесса прекращения управления второй автономной сменой полосы движения. В частности, устройство 19 управления использует функцию управления автономной сменой полосы движения, чтобы сообщать водителю информацию, указывающую, что управление автономной сменой полосы движения будет прекращено. Например, устройство 19 управления управляет устройством 15 представления, чтобы предоставить водителю сообщение «Смены полос движения будут прекращены из-за истечения времени», а затем завершает управление автономной сменой полосы движения. В процессе прекращения для управления автономной сменой полосы движения устройство 19 управления может оставить положение движения задействуемого транспортного средства в направлении ширины дороги в положении, в котором завершено управление автономной сменой полосы движения, или может также восстановить положение движения до положения, в котором управление автономной сменой полосы движения началось. Когда положение движения восстанавливается до положения, в котором управление автономной сменой полосы движения началось, водителю может быть предоставлено сообщение, такое как «Исходное положение будет восстановлено из-за истечения времени». [0115] С другой стороны, когда на этапе S40 истекшее время S2 с начала управления второй автономной сменой полосы движения не превышает ограничения Z по времени, процесс переходит на этап S43. На этапе S43 устройство 19 управления использует функцию управления автономной сменой полосы движения, чтобы определить, достигло ли задействуемое транспортное средство целевого положения для второй смены полосы движения. Когда задействуемое транспортное средство достигло целевого положения для второй смены полосы движения, процесс переходит на этап S44. На этапе S44 управление второй автономной сменой полосы движения завершается с использованием функции управления автономной сменой полосы движения, и поэтому устройство 15 представления представляет информацию о смене полосы движения, указывающую, что управление второй автономной сменой полосы движения завершено, то есть автономное управление последовательной сменой полосы движения завершено. Когда на этапе S43 выполняется определение того, что задействуемое транспортное средство не достигло целевого положения для второй смены полосы движения, процесс возвращается на этап S36, чтобы продолжить управление автономной сменой полосы движения. [0116] Когда на этапе S19 c Фиг.5B выполняется определение, что пространство, соответствующее требуемой области RR, отсутствует в пределах подходящей области OS в каждой из соседней полосы L2 и следующей соседней полосы L3 движения после требуемого времени T2, процесс переходит на этап S20. То есть, когда было пространство, соответствующее требуемой области RR в пределах подходящей области OS в каждой из соседней полосы L2 и следующей смежной полосы L3 в момент времени на этапе S10 начала автономного управления последовательными сменами полосы движения, но не оказывается пространства, соответствующего требуемой области RR в пределах подходящей области OS в каждой из соседней полосы L2 и следующей смежной полосы L3, после начала управления первой автономной сменой полосы движения, процесс переходит к этапу S20. На этапе S20 осуществляется обнаружение взаимного расположения в направлении ширины дороги между задействуемым транспортным средством и разметками полосы движения, которые задействуемое транспортное средство пересекает при смене полос движения (также именуемыми «подходящими разметками полосы движения» в дальнейшем). [0117] Например, Фиг.10 иллюстрирует обстановки, в которых задействуемое транспортное средство V0 меняет полосы движения в направлении, указанном стрелками на фигуре (смена полосы движения с левой полосы на правую на фигуре). В этом случае устройство 19 управления использует функцию управления автономной сменой полосы движения для определения любого состояния, в котором никакая часть задействуемого транспортного средства V0 не пересекает подходящие разметки CL полосы движения, как показано на Фиг.10 (A), состояния, в котором часть задействуемого транспортного средства V0 пересекает подходящие разметки CL полосы движения, но центральная линия VC задействуемого транспортного средства V0 не пересекает подходящие разметки CL полосы движения, как показано на Фиг.10 (B), состояния, в котором все задействуемое транспортное средство V0 не пересекает подходящие разметки CL полосы движения, а центральная линия VC транспортного средства V0 проходит через подходящие разметки CL полосы движения, как показано на Фиг.10 (C), и состояния, в котором все задействуемое транспортное средство V0 пересекает подходящие разметки CL полосы движения, как показано на Фиг.10(D). [0118] На этапе S51, показанном на Фиг.5E, устройство 19 управления использует функцию управления автономной сменой полосы движения для выполнения процесса управления для прекращения или продолжения управления автономной сменой полосы движения на основе взаимного расположения в направлении ширины дороги между подходящими разметками CL полосы движения и задействуемым транспортным средством V0, определенного на этапе S19 на Фиг.5B. В частности, устройство 19 управления использует функцию управления автономной сменой полосы движения для определения (а) способа представления информации водителю при прекращении или продолжении управления автономной сменой полосы движения, (b) управления после прекращения или продолжения управления автономной сменой полосы движения, и (c) положения движения задействуемого транспортного средства V0 при прекращении или продолжении управления автономной сменой полосы движения на основе взаимного расположения в направлении ширины дороги между подходящими разметками CL полосы движения и задействуемым транспортным средством V0. [0119] Например, устройство 19 управления использует функцию управления автономной сменой полосы движения для выполнения любого из следующих четырех способов в качестве способа (a) представления информации водителю при прекращении или продолжении управления автономной сменой полосы движения: (a1) способ, который включает в себя представление информации, позволяющей водителю выбирать между вариантами прекращения и продолжения управления автономной сменой полосы движения без ограничения по времени, и, когда водитель выбирает любой из вариантов, выполнение управления вариантом (прекращение или продолжение управление автономной сменой полосы движения) по выбору водителя; (a2) способ, который включает в себя представление информации, позволяющей водителю выбирать между вариантами прекращения движения и продолжения смены полосы движения с ограничением по времени, и, когда водитель выбирает любой из вариантов в пределах установленного времени, выполнение управления вариантом (прекращение или продолжение управление автономной сменой полосы движения), выбранным водителем, или, когда водитель не выбирает между вариантами в течение установленного срока, выполнение управления (управление по умолчанию) заранее определенным вариантом среди вариантов прекращения и продолжения управления автономной сменой полосы движения; (a3) способ, который включает в себя автономное выполнение прекращения или продолжения управления автономной сменой полосы движения и явное предоставление водителю способа отмены прекращения или продолжения управления автономной сменой полосы движения, которое выполняется автономно; и (a4) способ, который включает в себя автономное выполнение прекращения или продолжения управления автономной сменой полосы движения без явного предоставления водителю способа отмены прекращения или продолжения управления автономной сменой полосы движения, которое выполняется автономно. [0120] Дополнительно или в качестве альтернативы, устройство 19 управления использует функцию управления автономной сменой полосы движения для выполнения любой из следующих трех схем управления в качестве способа (b) управления после прекращения или продолжения управления автономной сменой полосы движения: (b1) схема, которая включает в себя прекращение управления автономной сменой полосы движения, а также прекращение автономной управления движением; (b2) схема, которая включает в себя прекращение только управления автономной сменой полосы движения и продолжение автономного управления движением; и (b3) схема, которая включает в себя приостановку управления автономной сменой полосы движения в состояние ожидания до тех пор, пока пространство, соответствующее требуемой области RR, не будет снова обнаружено в подходящей области OS в каждой из соседней полосы L2 движения и следующей соседней полосы L3 движения, и возобновление управления автономной сменой полосы движения, когда пространство, соответствующее требуемой области RR, снова обнаружено в подходящей области OS в каждой из соседней полосы L2 движения и следующей соседней полосы L3 движения. [0121] Дополнительно или в качестве альтернативы, устройство 19 управления использует функцию управления автономной сменой полосы движения для выполнения любой из следующих трех схем (c) регулировки положения для положения движения задействуемого транспортного средства при прекращении или продолжении управления автономной сменой полосы движения: (c1) схема, которая включает в себя восстановление положения задействуемого транспортного средства в исходное положение перед началом управления автономной сменой полосы движения; (c2) схема, которая включает в себя перемещение задействуемого транспортного средства в положение вблизи подходящих разметок CL полосы движения в полосе движения, по которой задействуемое транспортное средство двигалось до начала управления автономной сменой полосы движения; и (c3) схема, которая включает в себя сохранение текущего положения. [0122] Устройство 19 управления использует функцию управления автономной сменой полосы движения для осуществления процесса управления для прекращения или продолжения управления автономной сменой полосы движения путем надлежащего объединения двух или более из способа (a) представления информации водителю при прекращении или продолжении управления автономной сменой полосы движения, управления содержимым (b) после прекращения или продолжения управления автономной сменой полосы движения, и (c) положения движения задействуемого транспортного средства V0 при прекращении или продолжении управления автономной сменой полосы движения на основе взаимного расположения в направлении ширины дороги между подходящими разметками CL полосы движения и задействуемым транспортным средством V0. [0123] Например, когда никакая часть задействуемого транспортного средства V0 не пересекает подходящие разметки CL полосы движения, как показано на Фиг.10 (A), устройство 19 управления может выполнять способ (a4), который включает в себя автономное выполнение прекращения управления автономной сменой полосы движения без явного предоставления водителю способа отмены прекращения управления автономной сменой полосы движения. В этом случае устройство 19 управления может использовать функцию управления автономной сменой полосы движения для выполнения схемы (b1), которая включает в себя прекращение управления автономной сменой полосы движения, а также прекращение автономного управления движением, и схему (c1), которая включает в себя восстановление положения задействуемого транспортного средства в исходное положение до начала управления автономной сменой полосы движения. В таком случае устройство 19 управления может сообщить водителю содержимое управления, которое должно быть осуществлено с этого момента, для прекращения управления автономной сменой полосы движения, например: «Положение будет восстановлено в исходное положение, поскольку пространства для смен полос движения может быть недостаточным» и «Автономное управление движением будет отменено после возврата в исходное положение». В этом случае процесс переходит на этап S44 на Фиг.5D, для завершения управления автономной сменой полосы движения. [0124] Когда часть задействуемого транспортного средства V0 пересекает подходящие разметки CL полосы движения, но центральная линия VC задействуемого транспортного средства V0 не пересекает подходящие разметки CL полосы движения, как показано на Фиг.10 (B), устройство 19 управления может выполнять способ (a3), который включает в себя автономное выполнение прекращения управления автономной сменой полосы движения и явное предоставление водителю способа отмены прекращения управления автономной сменой полосы движения. В этом случае устройство 19 управления может использовать функцию управления автономной сменой полосы движения для выполнения схемы (c2), которая включает в себя перемещение задействуемого транспортного средства V0 в положение в непосредственной близости от подходящих разметок CL полосы движения в полосе движения, по которой задействуемое транспортное средство двигалось до начала управления автономной сменой полосы движения, а затем выполнения схемы (b2), которая включает в себя прекращение только управления автономной сменой полосы движения и продолжение автономного управления движением. В таком случае устройство 19 управления может сообщить, что содержимое управления должно выполняться с этого момента для прекращения управления автономной сменой полосы движения водителю, например: «Положение будет восстановлено в исходную полосу движения, поскольку пространства для смены полосы движения может быть недостаточно» и «Предыдущее автономное управление движением будет продолжено после возврата в исходное положение». Дополнительно или альтернативно, устройство 19 управления может отображать сообщение «Пожалуйста, нажмите кнопку ниже, если смена полосы движения должна быть продолжена» вместе с кнопкой для продолжения управления автономной сменой полосы движения. Когда водитель нажимает кнопку для продолжения управления автономной сменой полосы движения, процесс переходит к этапу S52 на Фиг.5E, хотя когда водитель не нажимает кнопку для продолжения управления автономной сменой полосы движения, процесс переходит к этапу S44 на Фиг.5D. [0125] Когда все задействуемое транспортное средство V0 не пересекает подходящие разметки CL полосы движения, но центральная линия VC задействуемого транспортного средства V0 проходит через подходящие разметки CL полосы движения, как показано на Фиг.10 (C), устройство 19 управления может выполнять способ (a4), который включает в себя автономное выполнение продолжения управления автономной сменой полосы движения без явного предоставления водителю способа отмены продолжения управления автономной сменой полосы движения. В этом случае устройство 19 управления может выполнять схему (c3), которая включает в себя ожидание при одновременном сохранении положения движения задействуемого транспортного средства в текущем положении, и схему (b3), которая включает в себя приостановку управления автономной сменой полосы движения до тех пор, пока пространство, соответствующее требуемой области RR, не будет снова обнаружено в подходящей области OS в каждой из соседней полосы L2 движения и следующей соседней полосы L3 движения, и возобновление управления автономной сменой полосы движения, когда пространство, соответствующее требуемой области RR, снова обнаружено в подходящей области OS в каждой из соседней полосы L2 движения и следующей соседней полосы L3 движения. В таком случае, например, устройство 19 управления может сообщить водителю содержимое управления, которое должно быть осуществлено с этого момента, для продолжения управления автономной сменой полосы движения, например: «Ожидание будет завершено в текущем положении, поскольку пространства для смены полос движения может быть недостаточным» и «Управление автономной сменой полосы движения будет продолжено, если пространство для смены полос движения будет найдено». В этом случае процесс переходит на этап S52 на Фиг.5E. [0126] Когда все задействуемое транспортное средство V0 пересекает подходящие разметки CL полосы движения, как показано на Фиг.10 (D), устройство 19 управления может выполнить способ (a4), который включает в себя автономное выполнение прекращения управления автономной сменой полосы движения без явного предоставления водителю способа отмены прекращения управления автономной сменой полосы движения. В этом случае устройство 19 управления может выполнять схему (с3), которая включает в себя поддержание положения движения задействуемого транспортного средства в текущем положении, и схему (b2), которая включает в себя прекращение только управления автономной сменой полосы движения и продолжение автономной управления движением. В таком случае устройство 19 управления может сообщить водителю содержимое управления, которое должно быть осуществлено с этого момента, для прекращения управления автономной сменой полосы движения, например: «Ожидание будет выполнено в текущем положении, поскольку пространства для смен полос движения может быть недостаточным» и «Предыдущее автономное управление движением будет продолжено». В этом случае процесс переходит на этап S44 с Фиг.5D для завершения процесса управления движением. [0127] Взаимное расположение в направлении ширины дороги между подходящими разметками CL полосы движения и задействуемым транспортным средством V0 не ограничивается четырьмя обстановками, показанными на Фиг.10(A)-(D) и пять или более или три или менее возможных обстановок могут быть использованы. Объединение схем управления для каждого взаимного расположения не ограничивается вышеописанными объединениями. Возможно любая объединение двух или более из способа (a) представления информации водителю при прекращении или продолжении управления автономной сменой полосы движения, управления содержимым (b) после прекращения или продолжения управления автономной сменой полосы движения, и (c) положения движения задействуемого транспортного средства при прекращении или продолжении управления автономной сменой полосы движения. [0128] Далее будет приведено описание случая, в котором продолжение управления автономной сменой полосы движения выполняется на этапе S51 на Фиг.5E. За этапом S51 начала продолжения управления автономной сменой полосы движения следует этап S52. На этапе S52 устройство 19 управления использует функцию управления автономной сменой полосы движения для измерения истекшего времени S3 после того, как управление автономной сменой полосы движения переходит на этапе S51 в состояние ожидания. То есть, в одном или более вариантах осуществления настоящего изобретения, когда управление автономной сменой полосы движения продолжается на этапе S51, управление автономной сменой полосы движения приостанавливается, и управление автономной сменой полосы движения переходит в состояние ожидания до тех пор, пока пространство, соответствующее требуемой области RR снова не будет обнаружено в подходящей области OS в каждой из соседней полосы L2 и следующей смежной полосы L3. На этапе S52 измеряется таким образом истекшее время S3 с начала ожидания управления автономной сменой полосы движения. [0129] На этапе S53 устройство 19 управления использует функцию управления автономной сменой полосы движения для оценки требуемого времени T5 для движения задействуемого транспортного средства из текущего положения в целевое положение для смены полос движения. Требуемое время T5 можно оценить тем же способом, что и на этапе S7 с Фиг.5А. [0130] На этапе S54 устройство 19 управления использует функцию управления автономной сменой полосы движения, чтобы определить, превышает ли общее время (S3+T5) истекшего времени S3, измеренного на этапе S52, и требуемого времени T5, оцененного на этапе S53, ограничение Z по времени, полученное на этапе S14 с Фиг.5B. Когда общее время (S3+T5) превышает ограничение Z по времени, процесс переходит к этапу S55, на котором устройство 19 управления использует функцию управления автономной сменой полосы движения для отмены состояния ожидания управления автономной сменой полосы движения и перемещения задействуемого транспортного средства в положение движения задействуемого транспортного средства до начала управления автономной сменой полосы движения. За этапом S55 следует этап S44 с Фиг.5D, на котором управление автономной сменой полосы движения завершается. С другой стороны, когда общее время (S3+T5) не превышает ограничения Z по времени, процесс переходит на этап S56. [0131] На этапе S56 устройство 19 управления продолжает состояние ожидания управления автономной сменой полосы движения. За этапом S56 следуют этапы с S57 по S58, на которых текущая подходящая область и подходящая область после требуемого времени T5 обнаруживаются как на этапах S4 и S8 с Фиг.5А. Затем, на этапе S59, как и на этапе S10 c Фиг.5A, устройство 19 управления определяет, имеется ли пространство, соответствующее требуемой области RR, в пределах подходящей области OS в каждой из соседней полосы L2 движения и следующей соседней полосы L3 движения после требуемого времени T5. Подходящая область OS в каждой из соседней полосы L2 движения и следующей соседней полосы L3 движения после требуемого времени T5 оценивается на этапе S58. На этапе S59 устройство 19 управления устанавливает требуемую область RR в целевое положение для смены полос движения. Когда подходящая область OS в каждой из соседней полосы L2 движения и следующей соседней полосы L3 движения после требуемого времени T5 включает в себя требуемую область RR, устройство 19 управления определяет, что пространство, соответствующее требуемой области RR, имеется в пределах подходящей области OS в каждой из соседней полосы L2 движения и следующей соседней полосы L3 движения после требуемого времени T5, и процесс переходит на этап S60. На этапе S60 устройство 19 управления использует функцию управления автономной сменой полосы движения для отмены состояния ожидания управления автономной сменой полосы движения и возобновления управления автономной сменой полосы движения, поскольку пространство, соответствующее требуемой области RR, обнаружено в пределах подходящей области OS в каждой из соседней полосы L2 движения и следующей соседней полосы L3 движения. В этом случае процесс возвращается на этап S16 с Фиг.5B. С другой стороны, когда на этапе S59 выполняется определение того, что пространство, соответствующее требуемой области RR, отсутствует в пределах подходящей области в каждой из соседней полосы L2 движения и следующей соседней полосы L3 движения после требуемого времени T5, процесс переходит на этап S61, на котором продолжается состояние ожидания управления автономной сменой полосы движения, и процесс возвращается на этап S52. [0132] Вышеупомянутые процессы, показанные на Фиг.5E, заимствованы для процесса этапа S30 с Фиг.5C и последующих процессов, а также процесса этапа S41 с Фиг.5D и последующих процессов. Однако в процессе этапа S30 с Фиг.5C и последующих процессов, обработка возвращается с этапа S60 c Фиг.5E на этап S25 на Фиг.5C, а в процессе этапа S43 с Фиг.5D и последующих процессов, обработка возвращается с этапа S60 c Фиг.5E на этап S36 на Фиг.5D. [0133] На этапе S6 на Фиг.5A и этапе S26 на Фиг.5C показан пример выполнения третьего варианта осуществления для установки поперечной скорости управления второй и последующими автономными сменами полосы движения согласно уровню K загруженности дорожного движения. Однако настоящее изобретение не ограничивается этим примером. Вместо третьего варианта осуществления может выполняться либо второй вариант осуществления, в котором поперечная скорость управления второй и последующими автономными сменами полосы движения устанавливается согласно направлению смены полосы движения, четвертый вариант осуществления, в котором поперечная скорость управления второй и последующими автономными сменами полосы движения устанавливается согласно радиусу Lr траектории, либо пятый вариант осуществления, в котором поперечная скорость управления второй и последующими автономными сменами полосы движения устанавливается в соответствии с количеством осадков Rf. В качестве альтернативы, варианты осуществления со второго по пятый могут быть объединены при необходимости для выполнения на этапах S6 и S26. [0134] Как описано выше, согласно настоящему варианту осуществления устройства 1 управления движением и способа управления движением транспортного средства, вторая поперечная скорость Vh2 для выполнения управления второй и последующими автономными сменами полосы движения устанавливается меньше, чем первая поперечная скорость Vh1 для выполнения управление первой автономной сменой полосы движения, когда управление автономной сменой полосы движения на другую соседнюю полосу движения в том же направлении смены полосы движения (с соседней полосы L2 на следующую соседнюю полосу L3) выполняется после того, как задействуемое транспортное средство V0 выполняет управление первой автономной сменой полосы движения с полосы L1 задействуемого транспортного средства к смежной полосе L2. Таким образом, управление второй автономной сменой полосы движения выполняется на более низкой скорости, чем управление первой автономной сменой полосы движения. В результате время для проверки и подтверждения происходящего вокруг с помощью датчиков 11 и т.п. до начала второй и последующих смен полосы движения удлиняется, и происходящее вокруг подтверждается должным образом. Кроме того, посредством выполнения управления второй автономной сменой полосы движения на скорости меньшей, чем скорость управления первой автономной сменой полосы движения, увеличивается время, которое следующее транспортное средство использует для подтверждения смены полосы движения задействуемого транспортного средства V0. В результате следующее транспортное средство может легко распознать смену полосы движения задействуемого транспортного средства V0. Соответственно, безопасность управления автономной сменой полосы движения еще больше повышается. [0135] Кроме того, согласно настоящему варианту осуществления устройства 1 управления движением и способа управления движением транспортного средства, поперечная скорость при выполнении управления автономной сменой полосы движения представляет собой скорость движения, когда задействуемое транспортное средство V0 пересекает подходящую разметку CL полосы движения, предусмотренную между полосами движения. Другими словами, поскольку скорость движения при фактическом перемещении между двумя соседними полосами движения управляется как поперечная скорость в управлении автономной сменой полосы движения, посредством управления поперечной скоростью, регулировкой времени, необходимого для подтверждения происходящего вокруг, и регулировкой времени, необходимого для того, чтобы следующее транспортное средство распознало смену полосы движения задействуемого транспортного средства V0, можно легко управлять. [0136] Кроме того, согласно настоящему варианту осуществления устройства 1 управления движением и способа управления движением транспортного средства, получается информация о движении касаемо состояния движения задействуемого транспортного средства V0; и поперечная скорость для выполнения управления второй и последующими автономными сменами полосы движения устанавливается на основе полученной информации о движении. Другими словами, на основе информации о движении, когда определяется, что происходящее вокруг трудно подтвердить в текущих условиях движения, или когда определяется, что смену полосы движения задействуемого транспортного средства V0 трудно подтвердить от следующего транспортного средства V3, то устанавливается поперечная скорость управления второй и последующими автономными сменами полосы движения. Выполняя управление второй и последующими автономными сменами полосы движения на более низкой скорости в соответствии с условиями движения, можно более точно проверять и подтверждать происходящее вокруг. Кроме того, выполняя управление второй и последующими автономными сменами полосы движения на более низкой скорости в соответствии с условиями движения, следующее транспортное средство может четко распознавать смену полосы движения задействуемого транспортного средства V0. [0137] Кроме того, согласно настоящему варианту осуществления устройства 1 управления движением и способа управления движением транспортного средства, определяется, превышает ли средняя скорость движения задействуемого транспортного средства полосы движения, по которой движется задействуемое транспортное средство V0, среднюю скорость движения полосы движения, на которую задействуемое транспортное средство V0 меняет полосы движения на основе полученной информации о движении; и когда средняя скорость движения полосы движения, на которую задействуемое транспортное средство меняет полосы движения, больше средней скорости движения полосы движения задействуемого транспортного средства, поперечная скорость, которая должна быть установлена для выполнения управления второй и последующими автономными сменами полосы движения, устанавливается меньшей, чем поперечная скорость должна быть установлена, когда средняя скорость движения полосы движения, на которую задействуемое транспортное средство меняет полосы движения, меньше средней скорости движения полосы движения задействуемого транспортного средства. Другими словами, когда выполняется смена полосы движения с полосы движения, скорость движения которой низкая, на полосу движения, скорость движения которой высокая, относительная скорость следующего транспортного средства по отношению к задействуемому транспортному средству V0 становится высокой, и расстояние между задействуемым транспортным средством V0 и следующим транспортным средством становится коротким. Таким образом, время подтверждения окружающей обстановки для второй и последующих смен полосы движения сокращается. Однако в настоящем варианте осуществления, поскольку управление второй и последующими автономными сменами полосы движения выполняется на более низкой скорости, когда выполняется смена полосы движения с полосы движения, скорость движения которой низкая, на полосу движения, скорость движения которой высокая, происходящее вокруг может быть более точно подтверждено, и следующее транспортное средство может четко распознавать смену полосы движения задействуемого транспортного средства V0. [0138] Кроме того, согласно настоящему варианту осуществления устройства 1 управления движением и способа управления движением транспортного средства, информация о другом транспортном средстве, двигающемся около задействуемого транспортного средства V0, получается как информация о движении; уровень загруженности K дороги определяется на основе информации о другом транспортном средстве; и поперечная скорость для выполнения управления второй и последующими автономными сменами полосы движения устанавливается согласно уровню K загруженности дорожного движения. То есть, когда уровень K загруженности дорожного движения около задействуемого транспортного средства V0 выше, то расстояние между задействуемым транспортным средством V0 и другим транспортным средством около задействуемого транспортного средства V0 становится маленьким. Таким образом, время, которое задействуемое транспортное средство V0 может использовать для подтверждения происходящего вокруг для второй и последующих смен полосы движения, сокращается. Однако в настоящем варианте осуществления, поскольку управление второй и последующими автономными сменами полосы движения выполняется на более низкой скорости согласно уровню K загруженности дорожного движения, то происходящее вокруг может быть более правильно подтверждено, и следующее транспортное средство может четко распознавать смену полосы движения задействуемого транспортного средства V0. [0139] Кроме того, согласно настоящему варианту осуществления устройства 1 управления движением и способа управления движением транспортного средства радиус траектории, по которой движется задействуемое транспортное средство V0, получается как информация о движении; и поперечная скорость для выполнения управления второй и последующими автономными сменами полосы движения устанавливается соответствующей радиусу траектории. Другими словами, когда радиус Lr траектории мал, водитель не может видеть далеко вперед, и поэтому для задействуемого транспортного средства V0 становится трудно подтверждать происходящее вокруг с помощью датчиков 11 и т.п. для второй смены полосы движения. Однако в настоящем варианте осуществления, поскольку управление второй и последующими автономными сменами полосы движения выполняется на более низкой скорости соответствующей радиусу Lr траектории, происходящее вокруг может быть более точно подтверждено, и следующее транспортное средство может четко распознавать смену полосы движения задействуемого транспортного средства V0. [0140] Кроме того, согласно настоящему варианту осуществления устройства 1 управления движением и способа управления движением транспортного средства, информация об осадках Rf получается как информация о движении; и поперечная скорость для выполнения управления второй и последующими автономными сменами полосы движения устанавливается в соответствии с осадками Rf. Другими словами, когда количество осадков Rf велико, происходящее вокруг трудно проверить и подтвердить для второй смены полосы движения с помощью датчиков 11 и т.п. задействуемого транспортного средства V0. Однако в настоящем варианте осуществления, поскольку управление второй и последующими автономными сменами полосы движения выполняется на более низкой скорости соответствующей осадкам Rf, происходящее вокруг может быть подтверждено более точно, и следующее транспортное средство может четко распознавать смену полосы движения задействуемого транспортного средства. V0. [0141] Кроме того, согласно настоящему варианту осуществления устройства 1 управления движением и способа управления движением транспортного средства, поперечная скорость управления (n+2)-ой автономной сменой полосы движения устанавливается такой же или меньшей, чем поперечная скорость управления (n+1)-ой автономной сменой полосы движения. В результате, даже когда три или более раз выполняется последовательное управление автономной сменой полосы движения, управление автономной сменой полосы движения может выполняться на более низкой скорости, то происходящее вокруг может быть подтверждено более точно, и смена полосы движения задействуемого транспортного средства V0 может быть четко распознана по следующим транспортным средством. [Описание позиционных обозначений] [0142]
Реферат
Изобретение относится к способу и устройству управления движением транспортного средства. Способ управления движением транспортного средства содержит этапы, на которых выполняют управление первой автономной сменой полосы движения, посредством которого задействуемое транспортное средство меняет полосы движения с полосы движения, по которой движется задействуемое транспортное средство, на соседнюю полосу движения и последовательно выполняют управление второй и последующими автономными сменами полосы движения, посредством которого задействуемое транспортное средство меняет полосы движения с соседней полосы на другую соседнюю полосу движения в том же направлении смены полосы движения, после выполнения управления первой автономной сменой полосы движения с полосы движения задействуемого транспортного средства на соседнюю полосу движения поперечная скорость для выполнения управления второй и последующими автономными сменами полосы движения устанавливается меньше поперечной скорости для выполнения управления первой автономной сменой полосы движения. Достигается повышение безопасности управления транспортным средством. 2 н. и 7 з.п. ф-лы, 28 ил.
Формула
Документы, цитированные в отчёте о поиске
Устройство управления движением и способ управления движением
Патенты аналоги
Устройство управления движением и способ управления движением
Комментарии